
Abstract
Repetitive trunk flexion tasks performed over long durations can increase low-back injury risk, where Back Support Industrial Exoskeletons (BSIEs) can be beneficial. While BSIEs have shown effectiveness in lab assessments, real-world outcomes have shown variation based on task complexity, necessitating monitoring of physical demands. Fourteen participants performed repetitive trunk BSIE-assisted forward bending and return, without fatigue and then at medium-high fatigue. We recorded muscle activity in low-back and thigh muscles using Electromyography (EMG) and whole-body stability using force plates. Classification algorithms, namely, Support Vector Machine (SVM), Random Forest (RF), and XGBoost (XGB) were utilized to predict perceived medium-high back fatigue using sensor data. Highest performance was observed with XGB algorithm using data from a single low-back EMG sensor (Accuracy: 86.1%, Recall: 86%), and force plate (93.5, 94.1%). Outcomes of our study can be helpful in developing novel fatigue detection products, benefiting ergonomists in properly implementing BSIEs in industrial scenarios.
Introduction
Industrial tasks involving trunk flexion, especially those performed repetitively for prolonged durations, may cause injuries to the low-back region of the human spine (Gajšek et al.,; Dolan & Adams, 1998; Parakkat et al., 2007). Recent years have seen notable technological advancements aimed at improving human physical capabilities. One such innovation is the exoskeleton (EXO), which utilizes mechanized structures and actuators to enhance strength, endurance, and mitigate injury risks (De Bock et al., 2022). A type of upper-body EXOs, known as Back Support Industrial Exoskeletons (BSIEs), assist in supporting upper-body weight through external mechanisms, redistributing loads to the lower body and safeguarding injury-prone regions such as the low back (Kermavnar et al., 2021). The use of these assistive devices can enhance their wearer’s endurance, enabling workers to perform tasks more efficiently.
Industrial EXOs are still task dependent, and may exacerbate physical demands in more complex real-world tasks (Kuber et al., 2022). For instance, awkward task postures may oppose natural body movement, and additional weight of the device can cause fatigue, especially if the tasks require too much body movement (Kranenborg et al., 2023; Sung et al., 2016). Although EXOs require in-depth field evaluations, current limitations such as accurate portable sensor technology and uncontrolled body movements pose challenges in conducting robust field studies. Meanwhile, outcomes from controlled lab-based studies may not account for complexity (e.g., variability in activity types of static/dynamic/sustained and task symmetry) of real-world tasks. Monitoring physical demands imposed on wearers while performing tasks with EXOs may be beneficial in determining their fit to the overall task and ensuring that their benefits are translated into real-world scenarios.
Fatigue is a common concern in industrial settings, affecting both physical and cognitive functions and potentially leading to overexertion injuries (Yu et al., 2019). Despite the benefits of BIEs in trunk bending tasks, their benefits are reduced, and even mixed during field evaluations. Monitoring overall demands using multiple sensors may be challenging given the current limitations of sensor technologies, as well as their intrusive nature (Kuber et al., 2022). Meanwhile, subjective ratings may be biased. Given these considerations, there is a pressing need to develop EXO-specific objective approaches for detecting fatigue. Such methods are essential for ensuring the safe and effective utilization of assistive devices in industrial settings, ultimately enhancing workplace productivity and worker well-being. Additionally, it is important to incorporate designated rest breaks to facilitate recovery (Yu et al., 2019). Since EXOs are still in early implementation stages, much remains unknown about their effects, that inform task design and selection of optimal work-rest ratios (Graham et al., 2009; Shin & Kim, 2007). Therefore, there is a pressing need to develop objective and accurate approaches for detecting fatigue in EXO wearers to ensure their safe and effective utilization in industrial settings.
Machine learning algorithms like support vector machines (SVM), Random Forests (RF), and XGBoost (XGB) enable efficient categorization of datapoints into sets. Such methods can be applied to distinguish sensor data. Common sensors to record physiological signals include wearable inertial sensors that facilitate recording body movement (Abdollahi et al., 2021), surface electromyography (EMG) sensors for recording muscle activity (Shin & Kim, 2007), and force plates for measuring balance (Huo, 1999). Prior studies have used measures of body motion (Jiang et al., 2021), muscle activity (Karthick et al., 2018), and balance (Antwi-Afari et al., 2023) to detect fatigue . This study aimed to (a) develop a machine learning model to predict fatigued states during BSIE-assisted trunk bending tasks using features calculated from muscle activity and force plate data, and (b) determine the measure that contributes to the highest predictability. Before commencing the study, our hypothesis was that measures of muscle activity would prove most effective in classifying fatigue states. The findings from this research hold potential benefits for the design of fatigue detection products tailored to individuals performing trunk bending tasks while utilizing a BSIE.
Methodology
Study Participants
For developing the fatigue-detection model, we conducted a laboratory experiment, where 14 participants were recruited from the university student population to perform repetitive trunk bending/retraction with assistance from a BSIE. Mean age, height, and weight of the participant pool were ~20 year, 179 cm, and 73 kg respectively. All participants consented to the experimental protocols approved by the university’s review board.
Measurement Apparatus
Both subjective and objective data were recorded throughout the experiment. Subjective data included fatigue ratings, which were noted both before and after the completion of each intermittent task cycle. Perceived fatigue levels in the back and leg regions were collected continuously throughout the experiment. Similarly, objective data from sensors were recorded for the entire duration of repetitive trunk bending, as well as during each task cycle of intermittent bending. Measures such as muscle activity in low-back and thigh muscles, trunk movement, and stability were captured using electromyography (EMG) wireless sensors (Delsys, Natick, MA, USA, 1,200 Hz), optoelectronic motion capture (Vicon Industries Inc., Hauppauge, NY, 100 Hz), and force plate systems (AMTI, Watertown, MA, USA, 1,000 Hz). The sensor placement for the sensor systems used in the study has been depicted in Figure 1. Data from all sensor systems were synchronized and recorded using Nexus 1.7.1 software (Vicon Industries Inc., Hauppauge, NY).
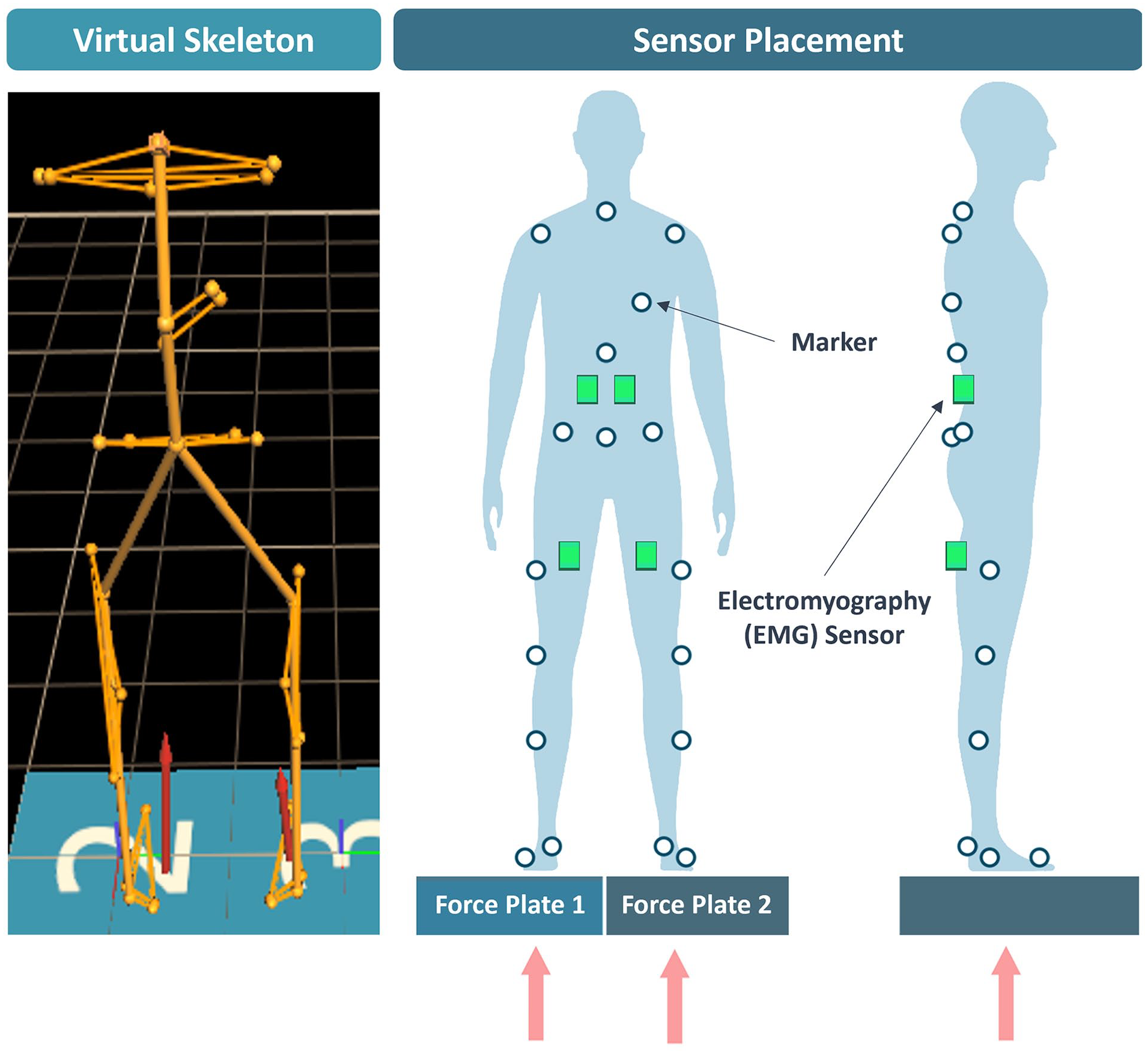
Schematic showing (left) a virtual skeleton as seen in the Nexus software and (right) placement of sensors on the human body with reflective markers for recording body movement, electromyography for muscle activity, and two floor embedded force plate systems. (Note. red arrows denote ground reaction force).
Experimental Procedure
Study participants initially performed 30 repetitive cycles, once at the outset without experiencing fatigue, and then repeated the cycles with a fatigue level of 7 (medium-high) on the Borg CR-10 Ratings of Perceived Exertion (RPE) scale. Tasks were conducted both with and without assistance using the BackX Model AC (SuitX, US Bionics, Inc., Emeryville, California, USA), and with or without a 45° asymmetry toward the left.
The study comprised three distinct sessions. The first served as a training session, during which participants familiarized themselves with the equipment and procedures. The subsequent two sessions involved task performance, with and without assistance, and with or without asymmetric postures. Before donning the BSIE, participants completed a wall-sit task to self-calibrate fatigue ratings, followed by manual restriction of body movement to collect Maximum Voluntary Contraction (MVC) values for each muscle group. All participants engaged in intermittent 45° trunk posture maintenance tasks until they reached a medium-high fatigue level in their back, as depicted in Figure 2. Before and after performing intermittent posture maintenance tasks, participants completed 30 repetitions of bending/return. Objective data from sensors was recorded continuously throughout the 30 cycles, along with perceived fatigue levels in the back region.
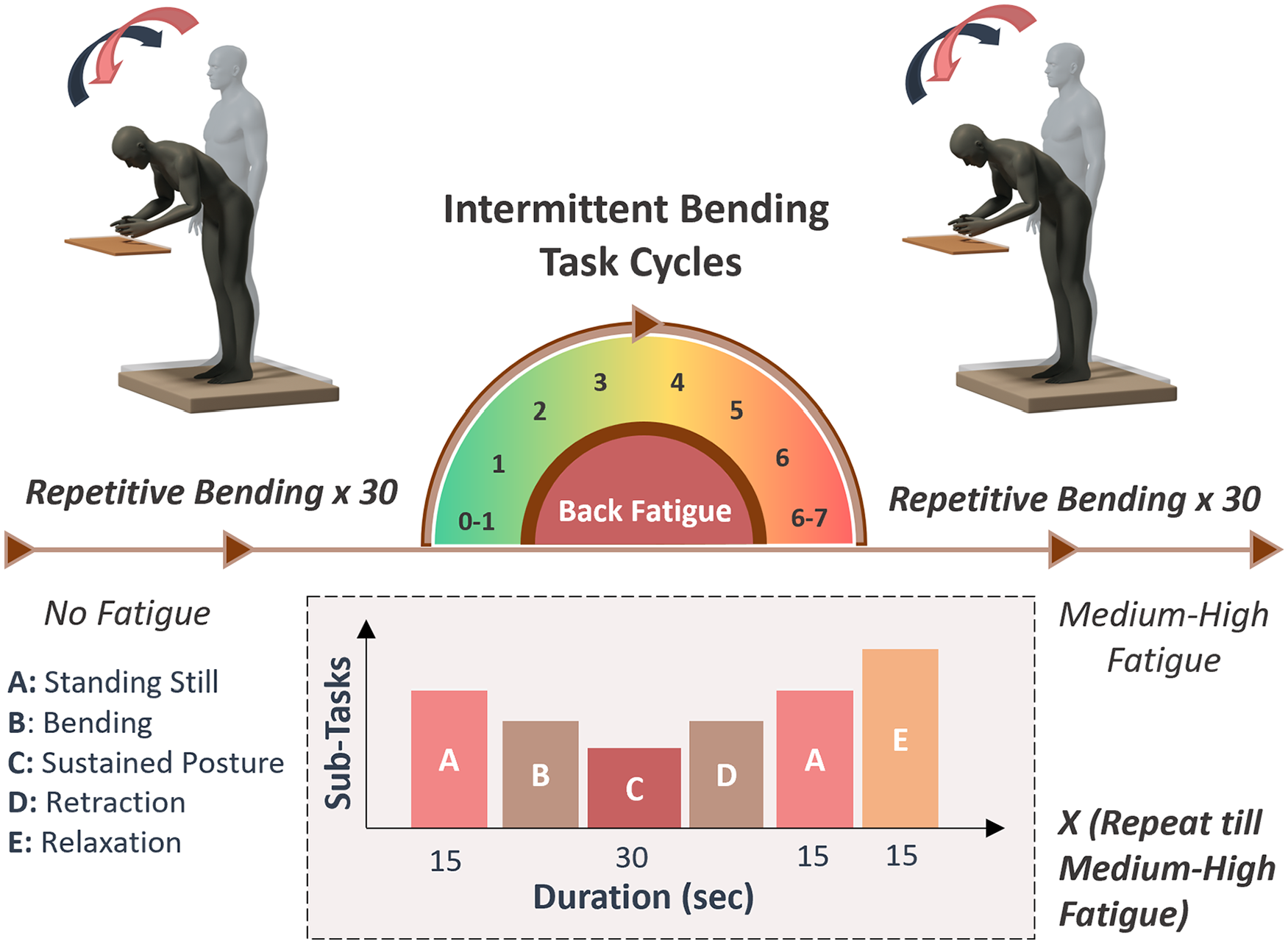
An illustration depicting the experimental protocol for data collection procedures, showing (top) repetitive trunk flexion (30 cycles) tasks were performed at the start of the session at no back fatigue, and then again at medium-high back fatigue, and (bottom) Static, dynamic, and sustained trunk flexion tasks that were performed intermittently with relaxation periods to induce fatigue.
Data Analysis
The Nexus 1.7.1 software (Vicon Industries Inc., Hauppauge, NY) facilitated the exportation of data from all systems into a single Excel file for each data collection trial. We developed custom code using MATLAB v2021b software (Natick, MA, USA) to import data from these Excel files and compute features. Before feature calculation, all signals underwent filtering. Given the study’s objectives, we focused solely on the condition of performing repetitive tasks at no/medium-high fatigue with EXO and without asymmetry. Segmentation of data included separating each bending-retraction cycle, and each cycle into three portions based on spatial movement of: (a) trunk bending, (b) switching between trunk bending to retraction, and (c) trunk retraction. Feature engineering led to 135 features from measures of muscle activity, trunk movement, and balance. Features consisted of statistical values (mean, median, peak, standard deviation, and variance). Muscle activity features were normalized using collected MVC values. A complete list of calculated features has been provided in our prior work (Kuber et al., 2024). Pre-processing included scaling values in instances where feature scales exhibited significant variation, such as in trunk movement features. Lastly, we applied four classification algorithms—Support Vector Machine (SVM), Logistic Regression (LR), Random Forest (RF), and XGBoost (XGB)—to the dataset to predict medium-high fatigue conditions based on data obtained from each sensor system. A Python script was written to develop fatigue detection models utilizing these machine learning algorithms. Performance evaluation of each model involved assessing accuracy (A), recall (R), and specificity (S), as well as generating confusion matrices.
Results And Discussion
The outcome of our analysis showed that the classification algorithms RF and XFB led to higher accuracy (A), recall (R), and specificity (S) than the SVM and LR algorithms for all three types of measures. Highest values were seen for the measures of muscle activity with RF (A: 94.5%, R: 93.6%, S: 95.5%) and XGB (A: 94.6%, R: 94.9%, S: 94.5%) algorithms with 48 features obtained from all four EMG sensors. Similar outcomes have been reported in prior studies that developed fatigue detection models (Jiang et al., 2021; Sedighi Maman et al., 2020). This was followed by whole-body stability and the least predictability was seen for trunk motion measure.
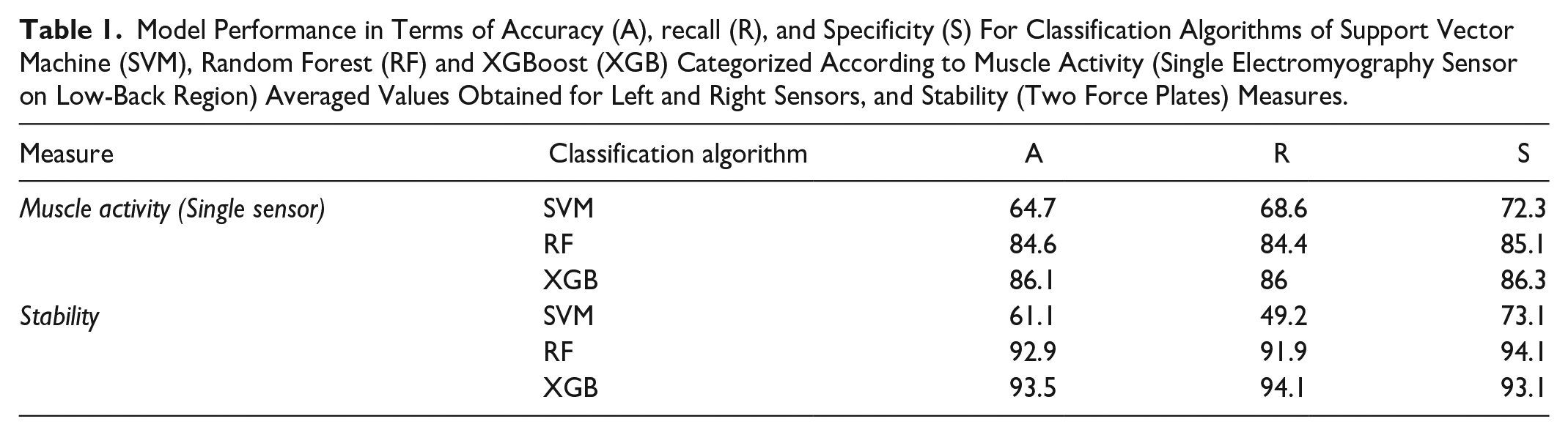
Values decreased with reduction in the number of sensors (as well as features), yet good predictability was obtained using RF and XGB algorithms. For instance, XGB (A:86.1%, R:86%, S: 86.3%) was effective in classifying fatigue using a single EMG sensor located on the low-back (erector spinae) muscle (Table 1). On the other hand, using the data obtained from the force plate with RF (A: 92.9%, R: 91.9%, S: 94.1%) and XGB (93.5%, 94.1%, 93.1%) led to high predictability. Performance of XGB in predicting fatigued states using features from a single EMG sensor, and force plates can also be viewed in the confusion matrices shown in Figure 3.
Model Performance in Terms of Accuracy (A), recall (R), and Specificity (S) For Classification Algorithms of Support Vector Machine (SVM), Random Forest (RF) and XGBoost (XGB) Categorized According to Muscle Activity (Single Electromyography Sensor on Low-Back Region) Averaged Values Obtained for Left and Right Sensors, and Stability (Two Force Plates) Measures.
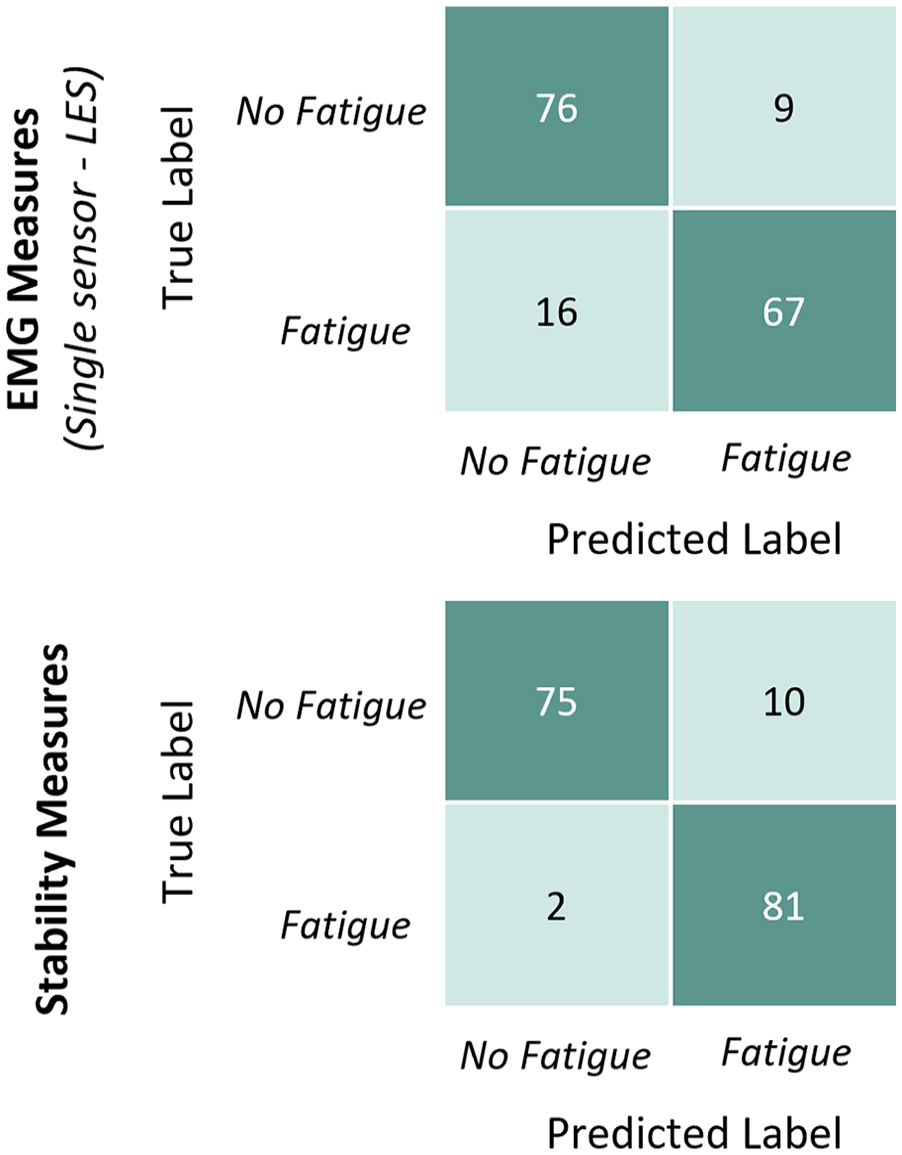
Confusion matrices showing performance of XGBoost algorithm in classifying No Fatigue and Fatigued (medium-high fatigue at Borg RPE scale of 7) states using (top) features obtained from a single EMG sensor, and (bottom) features obtained from stability measures (two force plates).
This study explored the use of machine learning algorithms for developing a fatigue detection model for industrial trunk flexion tasks assisted by a BSIE. Similar findings were observed in prior studies where RF and XGB algorithms showed high performance (Jiang et al., 2021; Pinto-Bernal et al., 2021; Zhang et al., 2014). We also studied performance variation with different sensor systems as well as sensor reduction. A sufficiently good performance (A:86.1%, R:86%, S: 86.3%) was observed using a single EMG sensor on the low-back (erector spinae) muscle. The heightened performance observed with stability features may have resulted from the combination of kinematic (movement in COP) and kinetic (ground reaction forces/GRF) features provided by force plates, rather than relying solely on motion or muscle activation. The effectiveness of stability features in fatigue detection suggests that overall balance may be significantly impacted during fatigued states. Future studies could concentrate on examining the effects of fatigue on body movement and balance, offering insights into assessing the risk of falls when performing tasks while using a BSIE. Furthermore, enhancing this model could involve considering a broader range of body movements and postures to enhance its applicability in real-world scenarios.
Accessibility considerations are crucial to ensure that data collection is feasible in real-world scenarios. For instance, while modern EMG sensors are wireless, they necessitate skin preparation and attachment/taping for accurate data capture. In contrast, force platforms can be floor-embedded with minimal disruption to human operators. Recently, portable alternatives to force platforms, like pressure insole sensors, have emerged in the market. Research demonstrates the potential of such sensors in evaluating interventions and physiological conditions in humans (Agrawal et al., 2023; Price et al., 2016). By replacing force plates/platforms with pressure insole sensors, which can be simply inserted into the shoes of human operators, data collection can be streamlined. Our study utilized two force plates, each supporting one foot, potentially facilitating a smooth transition to a pressure insole system. This shift could lead to more accessible and minimally invasive fatigue detection among BSIE users. Next step will include acquiring similar measures using a pressure insole system and evaluating its performance during real-world bending tasks beyond laboratory settings, to develop a fatigue detection system as elaborated further in our recent publication (Kuber et al., 2024). Future studies can also sub-divide fatigue levels into groups, such as low, medium, and high to provide more in-depth fatigue monitoring.
Conclusion
The efforts presented in this study demonstrate an experimental approach of developing a data-driven model for detecting fatigued state when performing exoskeleton-assisted tasks. Sensor systems included: (a) four wireless sensors to record muscle activity and (b) force plates to record balance. Three machine learning algorithms were tested, SVM, RF, and XGB to predict perceived medium-high back fatigue on the Borg RPE scale (7/10). Findings showed that the highest performance was achieved with the XGB algorithm. Even with the reduction in number of sensors, we were able to obtain sufficiently good performance using a single EMG sensor placed on the low-back region (Accuracy and Recall: ~86%). Similarly, using features from force plates led to high performance (~94%). Future work may explore the efficacy of pressure insole systems in predicting fatigued states. Overall, outcomes of this study can be beneficial in developing effective fatigue monitoring systems, ultimately helping in establishing guidelines for using BSIEs in real-world scenarios.
Footnotes
Acknowledgements
We would like to thank Robert Kraynik for his help in developing experimental setups for our experimental studies. We would also like to acknowledge Sergio Sanchez, Nolan Savage, and Behnam Kazempour for their assistance during data collection procedures, as well as Hrushi Godbole for his guidance during data analysis.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study did not receive any external funding from government or industry institutions. Partial funds for compensation of study participants were provided by the Department of Industrial and Systems Engineering at the Rochester Institute of Technology.