
Abstract
Upon starting a collective endeavour, it is important to understand your partners’ preferences and how strongly they commit to a common goal. Establishing a prior commitment or agreement in terms of posterior benefits and consequences from those engaging in it provides an important mechanism for securing cooperation. Resorting to methods from Evolutionary Game Theory (EGT), here we analyse how prior commitments can also be adopted as a tool for enhancing coordination when its outcomes exhibit an asymmetric payoff structure, in both pairwise and multi-party interactions. Arguably, coordination is more complex to achieve than cooperation since there might be several desirable collective outcomes in a coordination problem (compared to mutual cooperation, the only desirable collective outcome in cooperation dilemmas). Our analysis, both analytically and via numerical simulations, shows that whether prior commitment would be a viable evolutionary mechanism for enhancing coordination and the overall population social welfare strongly depends on the collective benefit and severity of competition, and more importantly, how asymmetric benefits are resolved in a commitment deal. Moreover, in multi-party interactions, prior commitments prove to be crucial when a high level of group diversity is required for optimal coordination. The results are robust for different selection intensities. Overall, our analysis provides new insights into the complexity and beauty of behavioural evolution driven by humans’ capacity for commitment, as well as for the design of self-organised and distributed multi-agent systems for ensuring coordination among autonomous agents.
1. Introduction
Achieving a collective endeavour among individuals with their own personal interest is an important social and economic challenge in various societies (Barrett, 2016; Hardin, 1968; Ostrom, 1990; Pitt et al., 2012; Sigmund, 2010). From coordinating individuals in the workplace to maintaining cooperative and trust-based relationship among organisations and nations, its success is often jeopardised by individual self-interest (Barrett, 2007; Perc et al., 2017). The study of mechanisms that support the evolution of such collective behaviours has been of great interest in many disciplines, ranging from Evolutionary Biology, Economics, Physics and Computer Science (Andras et al., 2018; Han, 2013; Kumar et al., 2020; Nowak, 2006; Perc et al., 2017; Sigmund, 2010; Tuyls & Parsons, 2007; West et al., 2007). Several mechanisms responsible for the emergence and stability of collective behaviours among such individuals have been proposed, including kin and group selection, direct and indirect reciprocities, spatial networks, reward and punishment (Nowak, 2006; Okada, 2020; Perc et al., 2017; Skyrms, 1996; West et al., 2007).
Recently, establishing prior commitments has been proposed as an evolutionarily viable strategy inducing cooperative behaviour in the context of pairwise and multi-player cooperation dilemmas (Arvanitis et al., 2019; Frank, 1988; Han et al., 2017; Han, Pereira, & Lenaerts, 2015; Nesse, 2001; Ohtsuki, 2018; Sasaki et al., 2015); namely, the Prisoner’s Dilemma (PD) (Han et al., 2013; Hasan & Raja, 2013) and the Public Goods Game (PGG) (Han et al., 2017; Han, Pereira, & Lenaerts, 2015; Kurzban et al., 2001). It provides an enhancement to different forms of punishment against inappropriate behaviours and of rewards to stimulate the appropriate ones (X. Chen et al., 2014; Cimpeanu et al., 2019; Martinez-Vaquero et al., 2015, 2017; Powers et al., 2012; Sasaki et al., 2015; Szolnoki & Perc, 2012; Wang et al., 2019), allowing one to efficiently avoid free-riders (Han & Lenaerts, 2016; Han, Santos, et al., 2015) and resolve the antisocial punishment problem (Han, 2016). These works have primarily focused on modelling prior commitments for improving mutual cooperation among self-interested agents. In the context of cooperation dilemma games (i.e. PD and PGG), mutual cooperation is the only desirable collective outcome to which all parties are required to commit if an agreement is to be formed. The same argument is applied to other pairwise and multi-player social dilemmas such as the Stag-Hunt and Chicken games, since although the nature of the games is different from the PD and PGG, mutual cooperation is the only desirable outcome to be achieved (Pacheco et al., 2009; F. C. Santos et al., 2006; Skyrms, 2003). In other contexts such as coordination problems, this is not the case anymore since there might be multiple optimal or desirable collective outcomes and players might have distinct, incompatible preferences regarding which outcome a mutual agreement should aim to achieve (e.g. due to asymmetric benefits). Such coordination problems are abundant in nature, ranging from collective hunting and foraging to international climate change actions and multi-sector coordination (Barrett, 2016; Bianca & Han, 2019; Ohtsuki, 2018; Ostrom, 1990; F. P. Santos et al., 2016; F. C. Santos & Pacheco, 2011; Skyrms, 1996).
Hence, we explore how arranging a prior agreement or commitment can be used as a mechanism for enhancing coordination and the population social welfare in this type of coordination problems, in both pairwise and multi-player interaction settings. Before individuals embark on a joint venture, a pre-agreement makes the motives and intentions of all parties involved more transparent, thereby enabling an easier coordination of personal interests (Cohen & Levesque, 1990; Han, 2013; Han, Santos, et al., 2015; Nesse, 2001). Although our approach is applicable for a wide range of coordination problems (e.g. single market product investments as described above), we will frame our models within the technology investment strategic decision-making problem, allowing us to describe the models clearly. Namely, we describe technology adoption games capturing the competitive market and decision-making process among firms adopting new technologies (Bardhan et al., 2004; Zhu & Weyant, 2003), with a key parameter
We will start by modelling a pairwise technology adoption decision making, where two investment firms (or players) compete within a same product market who need to make strategic decision on which technology to adopt (Chevalier-Roignant et al., 2011; Zhu & Weyant, 2003), a low-benefit (L) or a high-benefit (H) technology. Individually, adopting H would lead to a larger benefit. However, if both firms invest on H, they would end up competing with each other leading to a smaller accumulated benefit than if they could coordinate with each other to choose different technologies. However, given the asymmetry in the benefits in such an outcome, clearly no firm would want to commit to the outcome where its option is L, unless some form of compensation from the one selecting H can be ensured.
We then extend and generalise the pairwise model to a multi-player one, capturing the strategic interaction between more than two investment firms. In the multi-player model, a key parameter
The next section discusses related work, which is followed by a description of our models and details of the EGT methods for analysing them. Results of the analysis and a final discussion will then follow.
2. Related work
The problem of explaining the emergence and stability of collective behaviours has been actively addressed in different disciplines (Nowak, 2006; Sigmund, 2010). Among other mechanisms, such as reciprocity and costly punishment, closely related to our present model is the study of cooperative behaviours and pre-commitment in cooperation dilemmas, for both two-player and multi-player games (Han et al., 2013, 2017; Hasan & Raja, 2013; Quillien, 2020; Sasaki et al., 2015). It has been shown that to enhance cooperation, commitments need to be sufficiently enforced and the cost of setting up the commitments is justified with respect to the benefit derived from the interactions – both by means of theoretical analysis and of behavioural experiments (Arvanitis et al., 2019; X.-P. Chen & Komorita, 1994; Cherry & McEvoy, 2013; Kurzban et al., 2001; Ostrom, 1990). Our results show that this same observation is seen for coordination problems. However, arranging commitments for enhancing coordination is more complex, exhibiting a larger behavioural space, and furthermore, their outcomes strongly depend on new factors only appearing in coordination problems; namely, a successful commitment deal needs to take into account the fact that multiple desirable collective outcomes exist for which players have incompatible preferences; and thus how benefits can be shared through compensations in order to resolve the issues of asymmetric benefits is crucially important (Bianca & Han, 2019).
We moved further by expanding our two-player game in the previous work to a multi-player model, the outcome was more complex as there were more players involved. We yet again investigated how coordination and cooperation can be improved using prior commitment deal when there are multiple players involved and also when there is a particular market demand (Bianca & Han, 2019). Our approach in exploring how implementing prior commitment enhances cooperation dilemma has also been investigated by previous researchers in the past (X.-P. Chen & Komorita, 1994). A good level of cooperation was seen in a PGG experiment when there was a binding agreement made during the prior communication stage among members of the group. They hypothesised that if members of a group are allowed to make a pledge (a degree of bindings/commitment) before their actual decisions, they will be able to communicate their intentions, and it will overall increase cooperation rate in the population. As predicted, their results clearly demonstrate that making a pledge improves cooperation although the degree of commitment required in the pledge deferentially affected the cooperation rate (X.-P. Chen & Komorita, 1994; Cherry & McEvoy, 2013; Kurzban et al., 2001).
There have been several other works studying the evolution of coordination, using the so-called Stag-Hunt game (see, for example, Pacheco et al., 2009; F. C. Santos et al., 2006; Sigmund, 2010; Skyrms, 2003). However, to the best of our knowledge, there has been no work studying how prior commitments can be modelled and used for enhancing the outcome of the evolution of coordination. As our results below show, significant enhancement of coordination and population welfare can be achieved via the arrangement of suitable commitment deals.
Furthermore, it is noteworthy that commitments have been studied extensively in Artificial Intelligence and Multi-agent systems literature (see, for example, Castelfranchi & Falcone, 2010; Chopra & Singh, 2009; Harrenstein et al., 2007; Rzadca et al., 2015; Singh, 1991; Winikoff, 2007). Different from our work, these studies utilise commitments for the purpose of regulating individual and collective behaviours, formalising different aspects of commitments (such as norms and conventions) in multi-agent systems. However, our results and approach provide important new insights into the design of such systems as these require commitments to ensure high levels of efficient collaboration and coordination within a group or team of agents. For example, by providing suitable agreement deals, agents can improve the chance that a desirable collective outcome (which is best for the systems as a whole) is reached even when benefits provided by the outcome are different for the parties involved.
3. Models and methods
In the following, we first describe a two-player technology adoption game then extend it with the option of arranging prior commitments before playing the game. We then present a multi-player version of the model, with and without commitments, too. Then, we describe the methods, which are based on EGT for finite populations, which will be used to analyse the resulting models.
3.1. Two-player tech adoption game
3.1.1. Two-player tech adoption without commitments
We consider the scenario that two firms (players) compete for the same product market, and they need to make a (strategic) decision on which technology to invest on, a low-benefit (L) or a high-benefit (H) technology. The outcome of the interaction can be described in terms of costs and benefits of investments by the following payoff matrix (for row player)
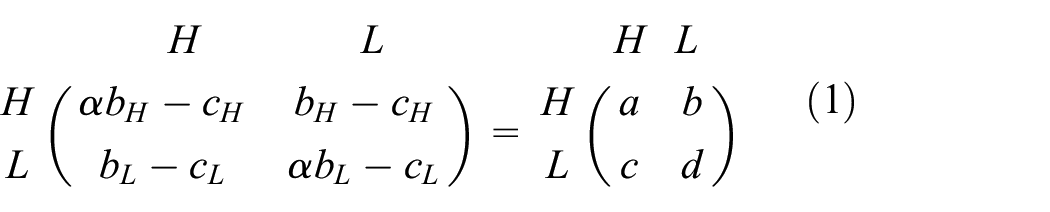
where
Note that although we describe our model in terms of technology adoption decision making, it is generally applicable to many other coordination problems for instance wherever there are strategic investment decisions to make (in competitive markets of any products) (Chevalier-Roignant et al., 2011; Zhu & Weyant, 2003).
3.1.2. Two-player tech adoption in presence of commitments
We now extend the model allowing players to have the option to arrange a prior commitment before a tech adoption (TD) interaction. A commitment proposal is to ask the co-player to adopt a different technology. That is, a strategist intending to use H (resp., L) would ask the co-player to adopt L (resp., H). We denote these commitment proposing strategies as HP and LP, respectively. Similar to previous models of commitments (for PD and PGG) (Han et al., 2013; Han, Pereira, & Lenaerts, 2015), to make the commitment deal reliable, a proposer pays an arrangement cost
Different from previous models on PD and PGG where an agreed outcome leads to the same payoff for all parties in the agreement (mutual cooperation benefit), in the current model, such an outcome would lead to different payoffs for those involved. Therefore, as part of the agreement, HP would compensate after the game an amount
Besides HP and LP, we consider a minimal model with the following (basic) strategies in this commitment version:
Non-proposing acceptors, HC and LC, who always commit when being proposed a commitment deal wherein they are willing to adopt any technology proposed (even when it is different from their intended choice), honour the adopted agreement, but do not propose a commitment themselves. They play their intended choice, that is, H and L, respectively, when there is no agreement in place;
Non-acceptors, HN and LN, who do not accept commitment, play their intended choice during the game and do not propose commitments;
Fake committers, HF and LF, who accept a commitment proposal yet play the choice opposite to what has been agreed whenever the game takes place. These players assume that they can exploit the commitment proposing players without suffering the consequences. 1
Note that similar to the commitment models for the PD game (Han et al., 2013), some possible strategies have been excluded from the analysis since they are dominated by at least one of the strategies in any configuration of the game: they can be omitted without changing the outcome of the analysis. For example, those who propose a commitment (i.e. paying a cost
Together the model consists of eight strategies that define the following payoff matrix, capturing the average payoffs that each strategy will receive upon interaction with one of the other seven strategies (where we denote
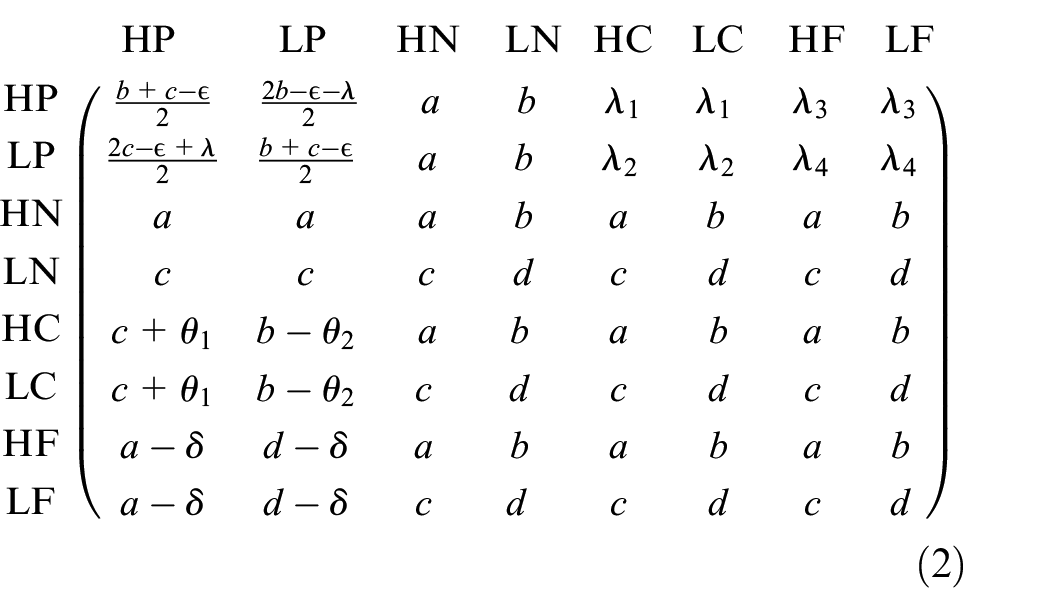
Note that when two commitment proposers interact, only one of them will need to pay the cost of setting up the commitment. Yet, as either one of them can take this action, they pay this cost only half of the time (on average). In addition, the average payoff of HP when interacting with LP is given by
We say that an agreement is fair if both parties obtain the same benefit when they honour it (after having taken into account the cost of setting up the agreement). For that, we can show that
With these conditions, it also ensures that the payoffs of HP and LP when interacting with each other are equal. Our analysis below will first focus on whether and when the fair agreements can lead to improvement in terms of coordination and the overall social welfare (i.e. average population payoff). We will discuss how different kinds of agreements (varying
3.2. Multi-player TD game
3.2.1. Multi-player TD without commitments
We now describe a

where
Hence, we define


The rationale of these definitions is that whenever
The optimal group payoff is achieved when there are exactly

3.2.2. Multi-player TD in presence of commitments
We can define the
List of parameters in the models.
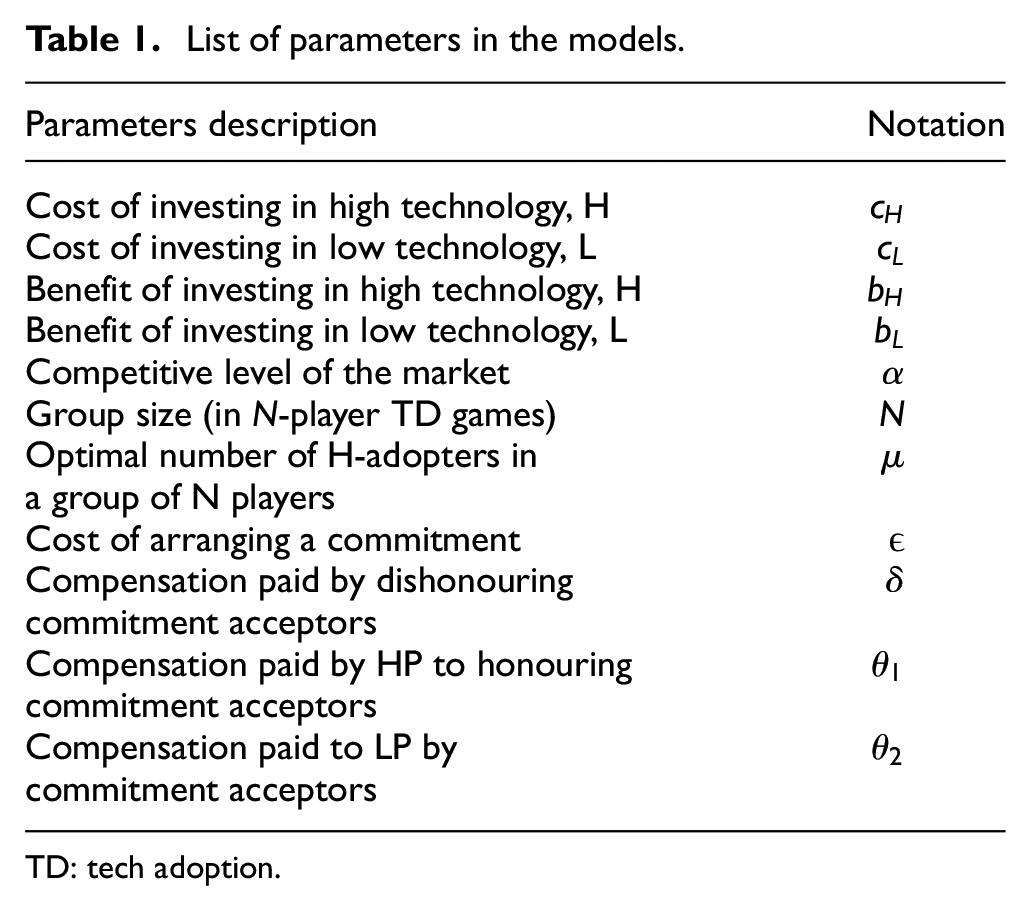
TD: tech adoption.
3.3. Evolutionary dynamics
In this work, we will perform theoretical analysis and numerical simulations (see next section) using EGT methods for finite populations (Hauert et al., 2007; Imhof et al., 2005; Nowak et al., 2004). Let

The parameter
In the absence of mutations or exploration, the end states of evolution are inevitably monomorphic: once such a state is reached, it cannot be escaped through imitation. We thus further assume that, with a certain mutation probability, an individual switches randomly to a different strategy without imitating another individual. In the limit of small mutation rates, the dynamics will proceed with, at most, two strategies in the population, such that the behavioural dynamics can be conveniently described by a Markov Chain, where each state represents a monomorphic population, whereas the transition probabilities are given by the fixation probability of a single mutant (Hauert et al., 2007; Imhof et al., 2005; Nowak et al., 2004). The resulting Markov Chain has a stationary distribution, which characterises the average time the population spends in each of these monomorphic end states. It has been shown to have a range of applicability which goes well beyond the strict limit of very small mutation (or exploration) rates (Han et al., 2012; Hauert et al., 2007; Rand et al., 2013; Sigmund, 2010; Sigmund et al., 2010).
Before describing how to calculate this stationary distribution, we need to show how payoffs are calculated, which differ for two-player and N-player settings, as below.
Average Payoff for the Two-Player Game
Let
Expected Payoff in the Multi-player Game
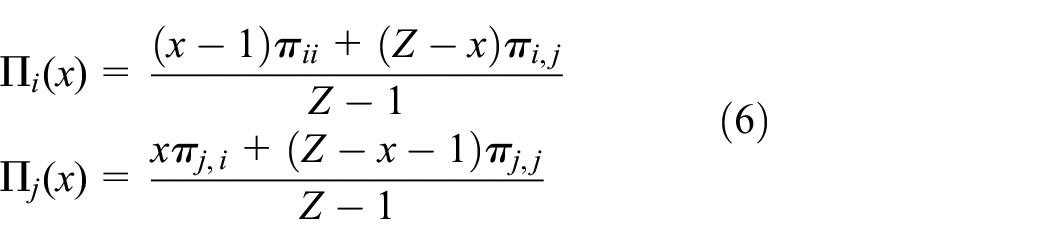
In the case of
Hence, in a population of
Now, for both two-player and

The fixation probability of a single mutant with a strategy

Considering a set
Risk-dominance: An important measure to determine the evolutionary dynamic of a given strategy is its risk-dominance against others. For the two strategies

This condition is applicable for both two-player games,
4. Results
We will first describe results for two-player games, then proceeding to provide those for the
4.1. Two-player TD game results
4.1.1. Analytical conditions for the viability of commitment proposers
To begin with, using the conditions given in equation (10), we obtain that if

then HP is risk-dominant (see Methods) against LP. Otherwise, LP is risk-dominant against HP.
Similarly, we derive the conditions regarding the commitment parameters for which HP and LP are evolutionarily viable strategies, that is, when they are risk-dominant against all other non-proposing ones. Indeed, HP and LP are risk-dominant against all other six non-proposing strategies, respectively, if and only if

Note that each element in the
Thus, we can derive the conditions for
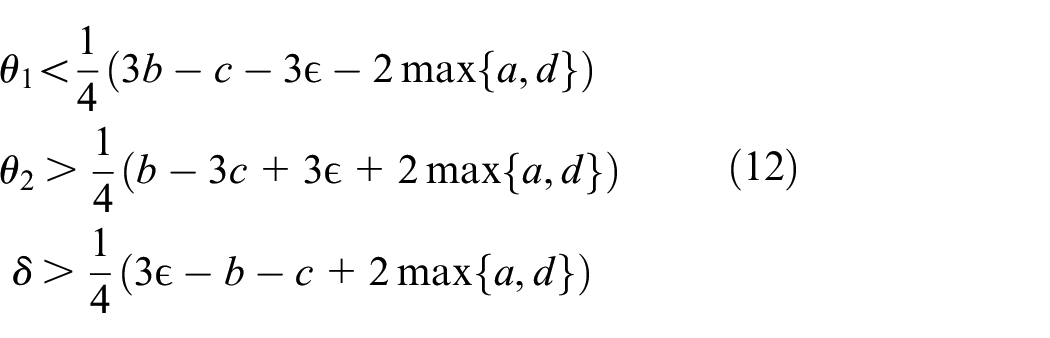
In particular, for fair agreements, that is,

It is because
In general, these conditions indicate that for commitments to be a viable option for improving coordination, the cost of arrangement
Moreover, the conditions in equation (13) can be expressed in terms of
which can be rewritten as

This condition indicates under what condition of the market competitiveness and the costs and benefits of investing in available technologies, commitments can be an evolutionarily viable mechanism. Intuitively, for given costs and benefits of investment (i.e. fixing
Remarkably, our numerical analysis below (see Figure 1) shows that the condition in equation (14) accurately predicts the threshold of
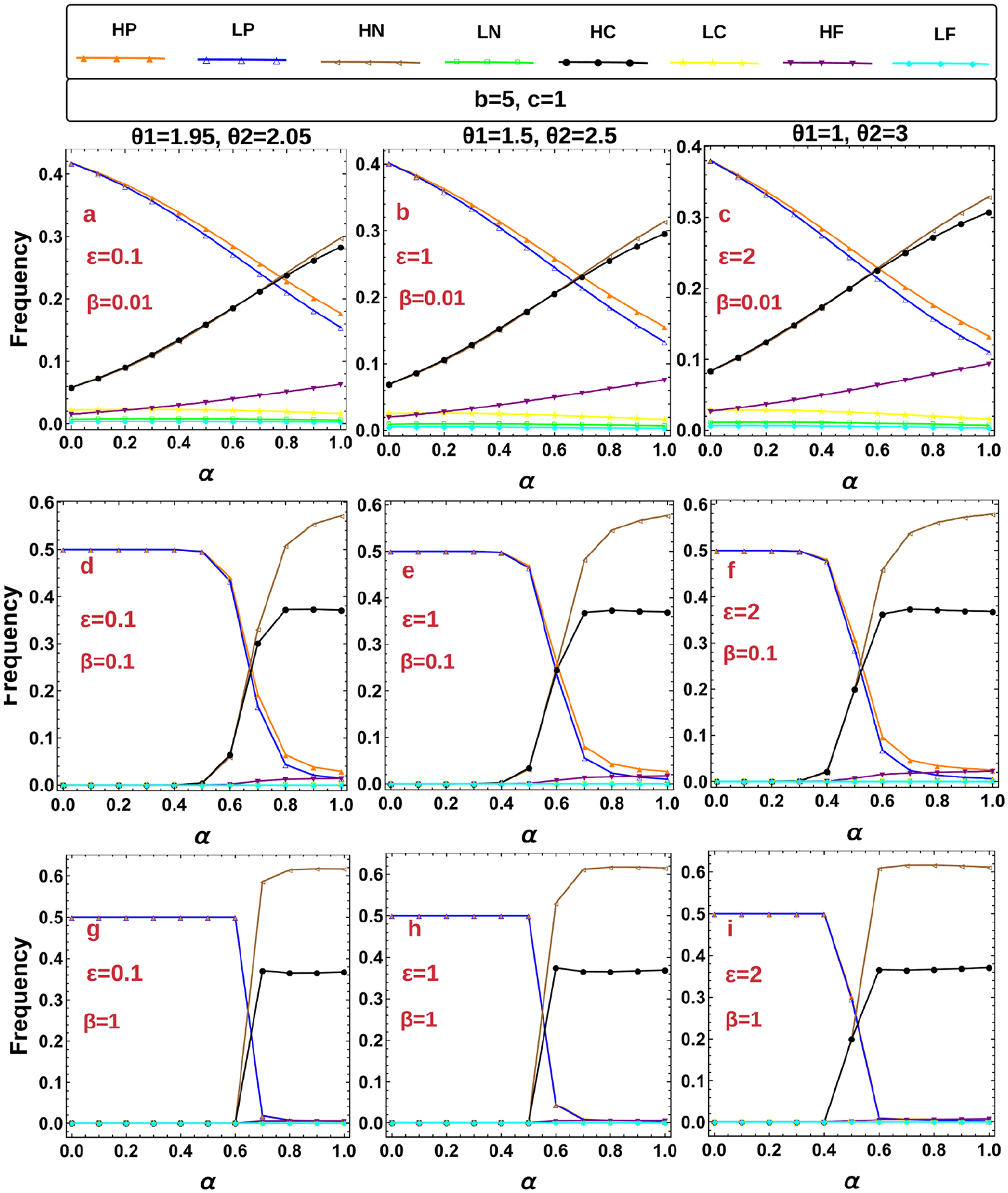
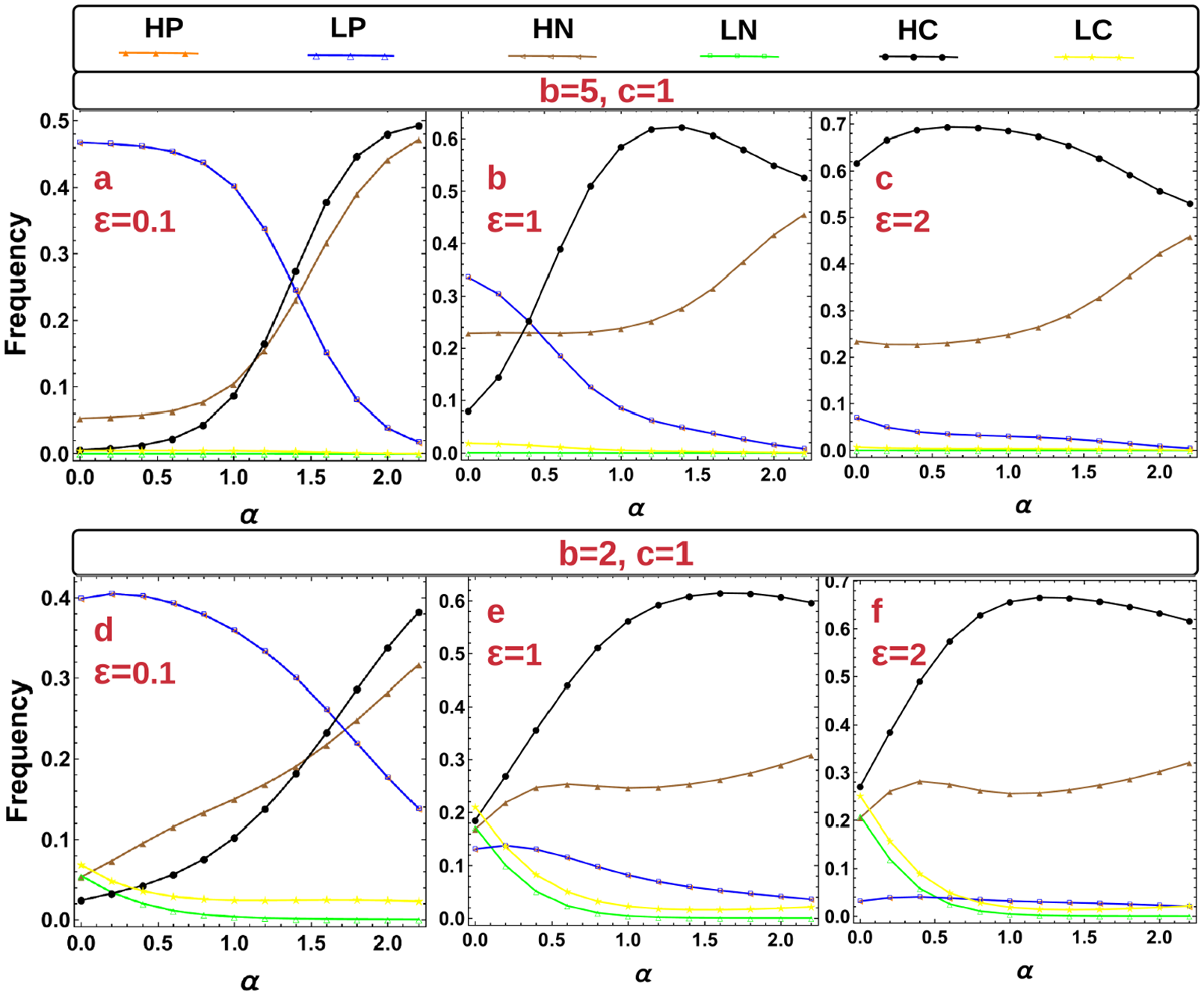
Frequency of the eight strategies, HP, LP, HN, LN, HC, LC, HF and LF, as a function of
On the contrary, when
4.1.2. Numerical results for pairwise TD game
We calculate the stationary distribution in a population of eight strategies, HP, LP, HN, LN, HC, LC, HF and LF, using methods described above. In Figure 1, we show the frequency of these strategies as a function of
This observation is robust for varying commitment parameters, that is, the cost of arranging commitment,
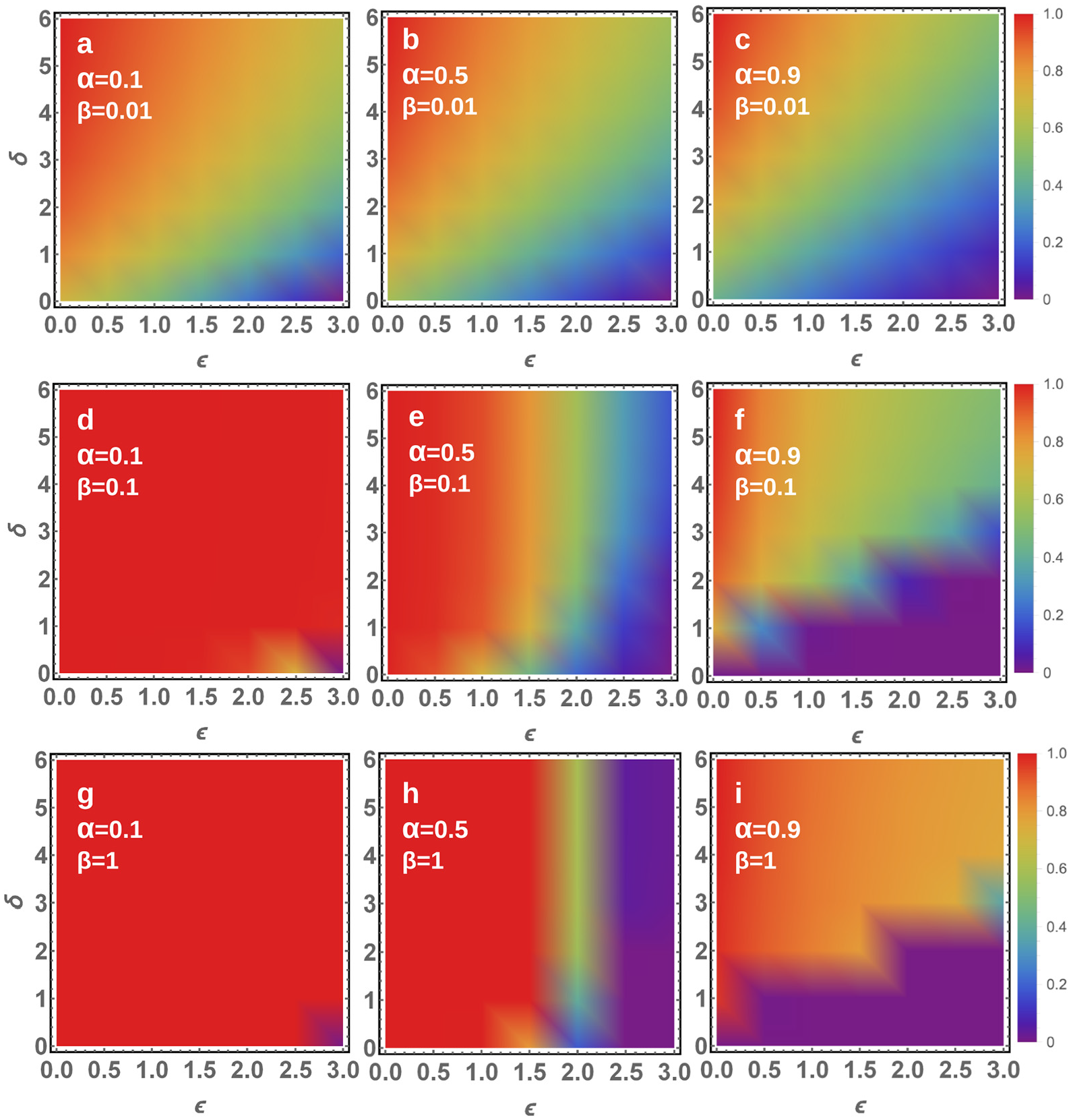
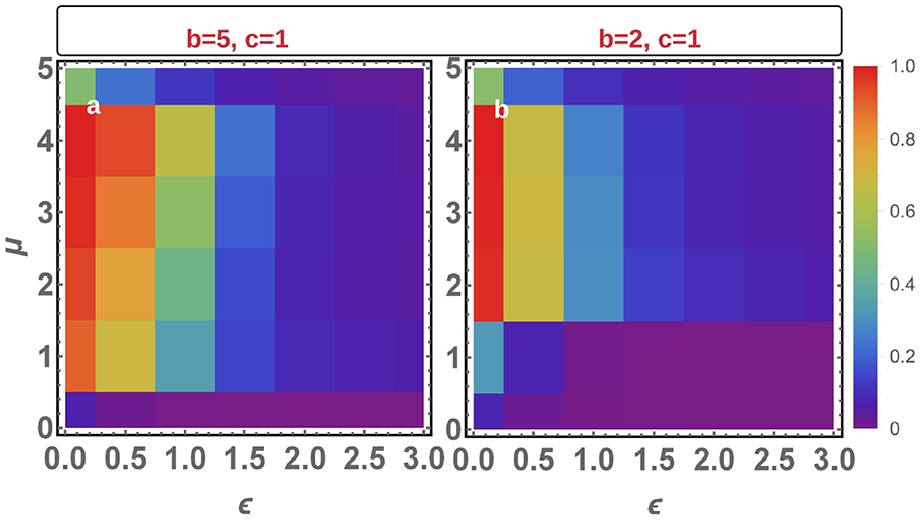
Total frequency of commitment strategies (i.e. sum of the frequencies of HP and LP), as a function of
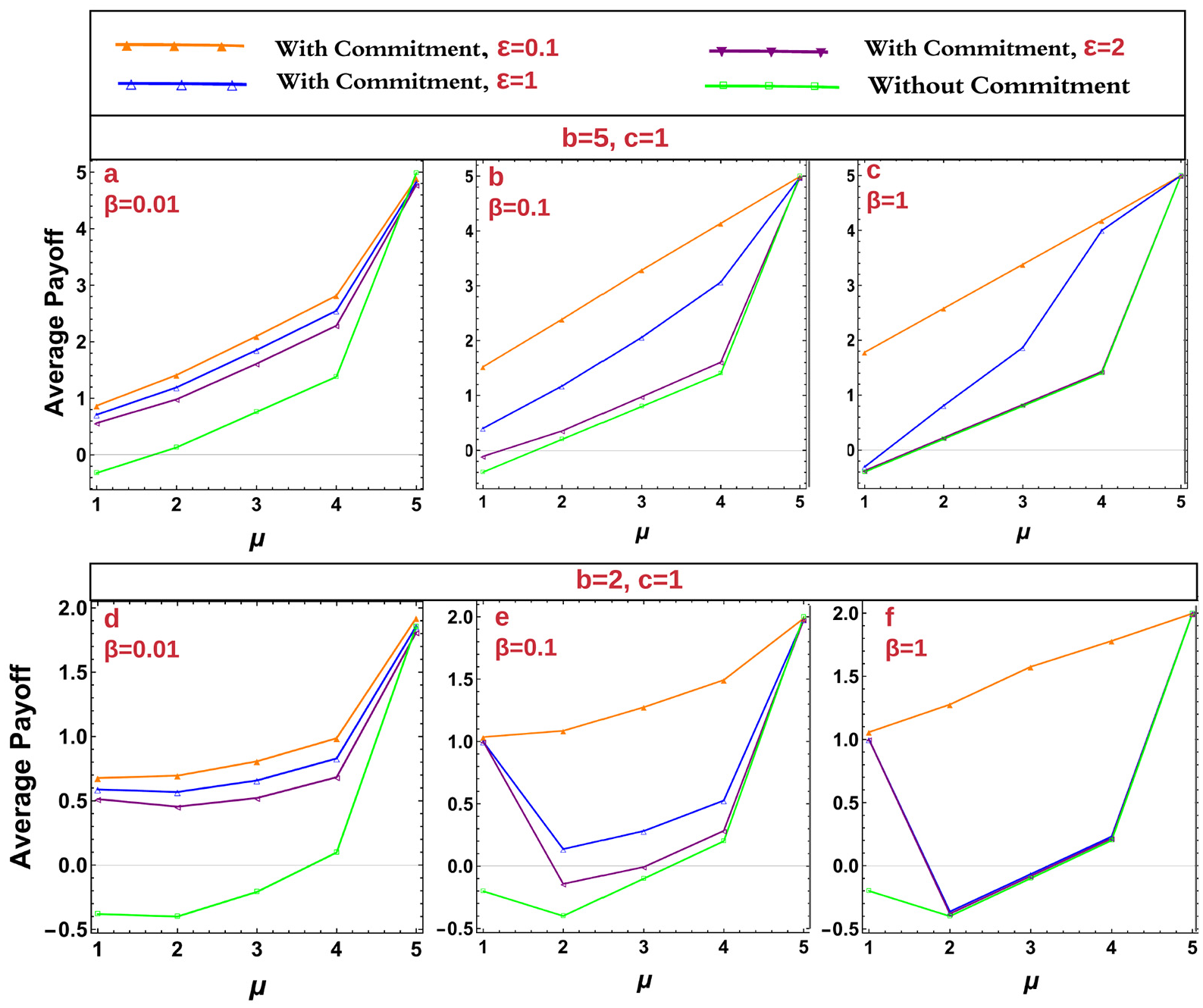
Now, in order to determine whether and when commitments can actually lead to meaningful improvement, in Figure 3, we compare the average population payoff or social welfare when a commitment is present and when it is absent. In general, it can be seen that when
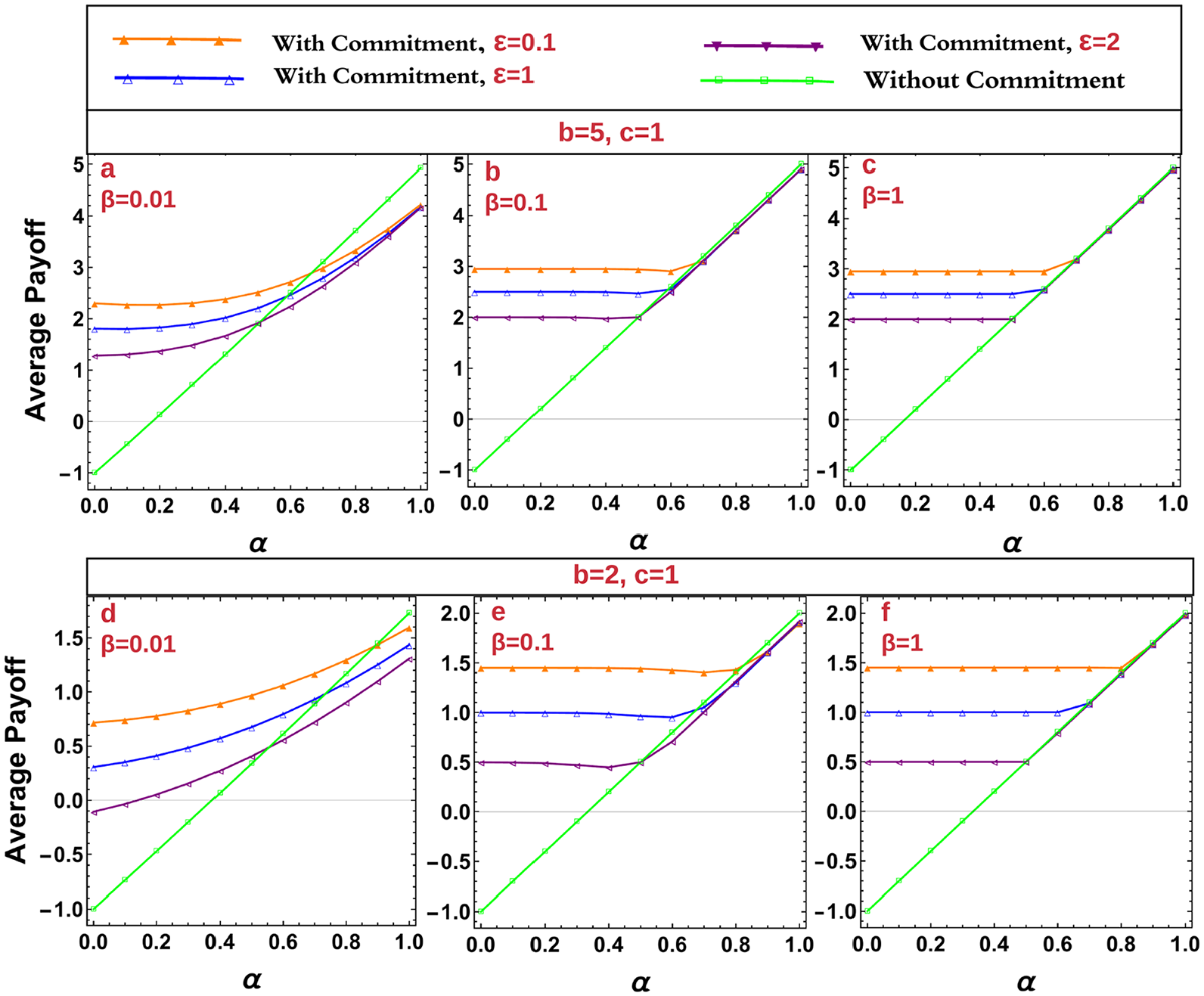
Average population payoff as a function of
4.2. Multi-player game results
4.2.1. Payoff derivation in N-player TD game
As mentioned above, compared to cooperation dilemmas such as PD and PGG, fake strategies make less sense in the context of coordination games since they would not earn the temptation payoff by adopting a different choice from what is being agreed. To focus on the group effect and the effect of the newly introduced parameter
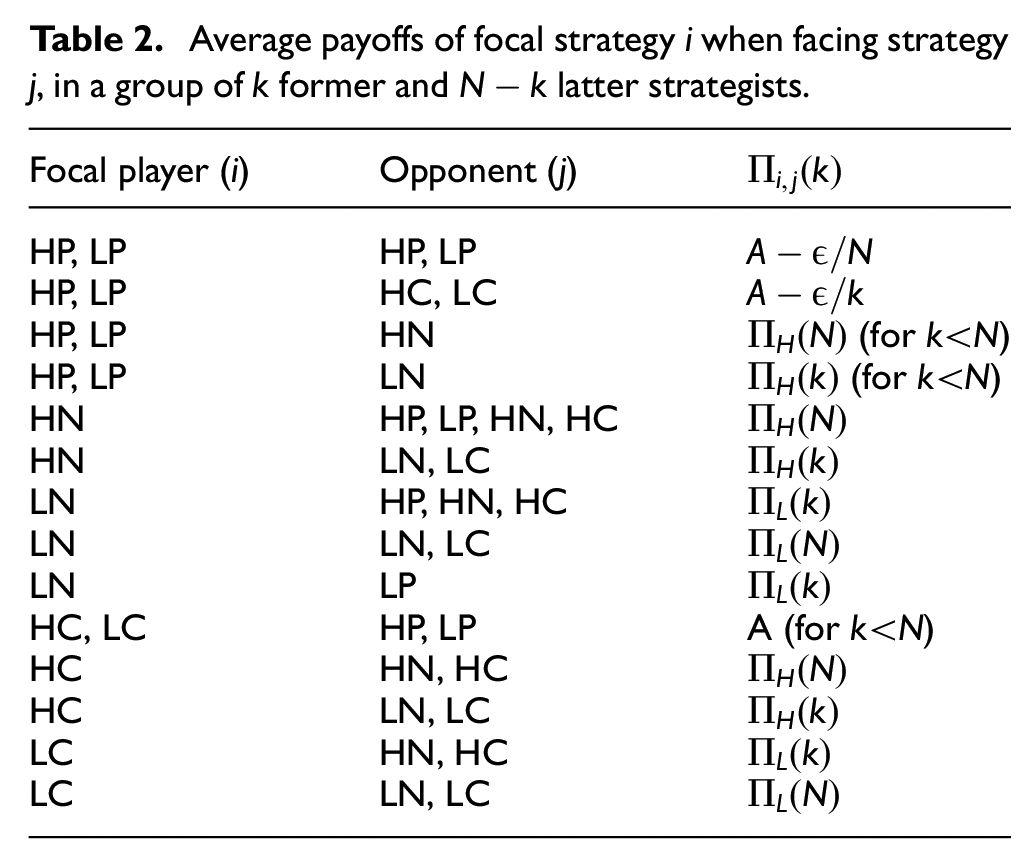
First of all, we derive the payoffs received by each strategy when encountering specific other strategies (see a summary in Table 2). Namely,
Average payoffs of focal strategy
4.2.2. Analytical conditions for the viability of commitment proposers in N-player TD game
We now derive the conditions under which HP is risk-dominant against the rest of strategies. Since we assume fair agreements, the conditions for LP would be equivalent to those for HP in terms of risk-dominance. For ease of following the derivations below, we recall that

HP is risk-dominant against HC if

which can be written as

Hence we obtain

Where

Similarly, HP is risk-dominant against LC if

For risk-dominance of HP against HN,

which equivalently can be written as
Finally, HP is risk-dominant against LN if

which can be rewritten as
In short, in order for commitment proposers to be risk-dominant against all other strategies, it requires that
4.3. Numerical results for N-player TD game
We compute stationary distributions in a population of six strategies HP, LP, HN, LN, HC and LC, for the N-player TD game, using the payoffs in Table 1 and the Methods described above. To begin with, in Figure 4 (see also Figure 9 in Appendix 1), we provide numerical validation for the analytical conditions obtained in the previous section regarding when commitment proposing strategies are evolutionarily viable strategies (being risk-dominant against others). Similar to the pairwise TD game, we observe that there is a threshold for
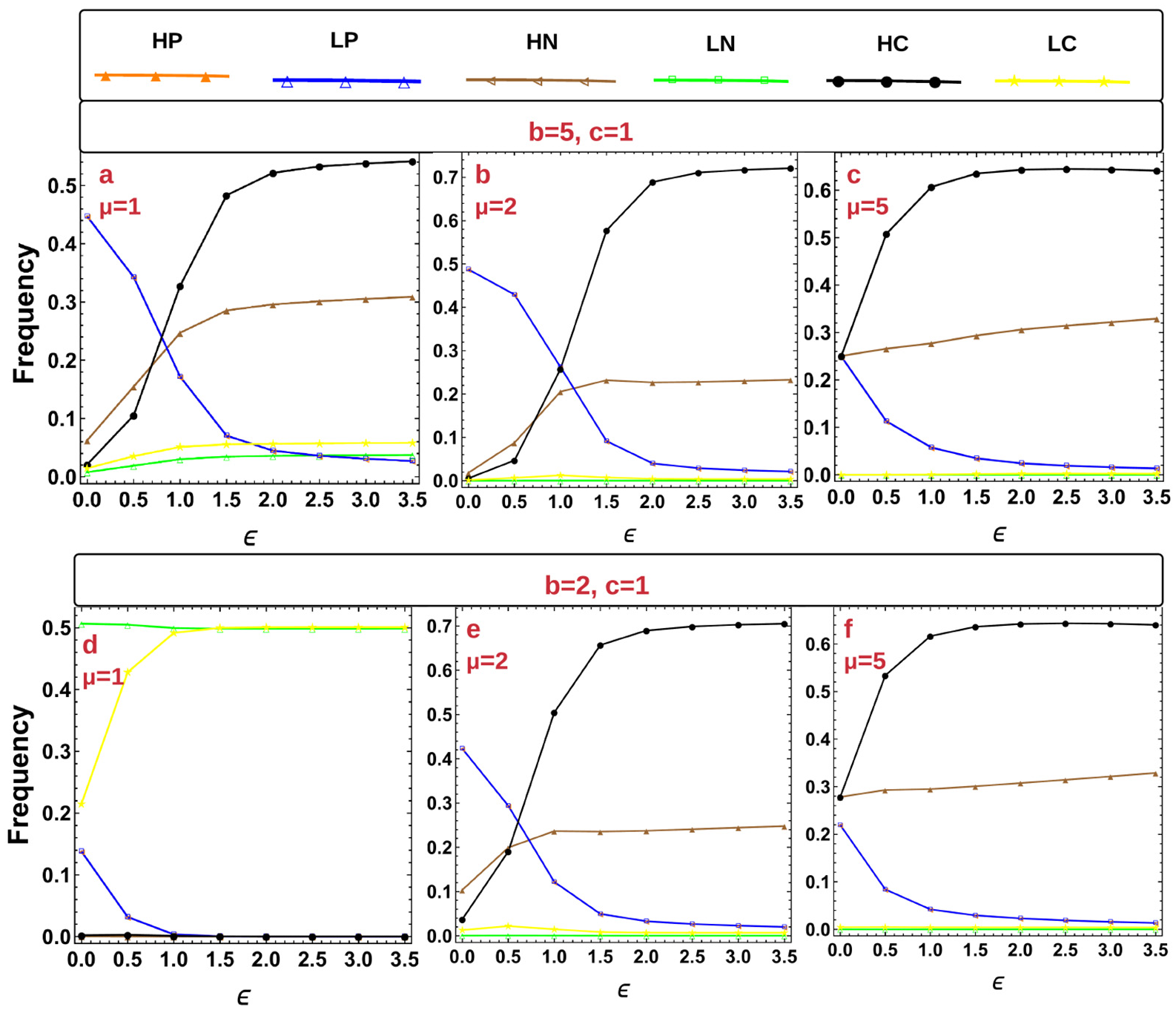
Frequency of the six strategies HP, LP, HN, LN, HC and LC, as a function of
Frequency of the six strategies HP, LP, HN, LN, HC and LC, as a function of
We now focus on understanding the effect of the new parameter in the N-player game,
Total frequency of commitment proposing strategies HP and LP as a function of
We now closely examine the gain in terms of social welfare improvement when using prior commitments. As shown in Figure 7, whenever
Average population payoff (social welfare) as a function of
5. Conclusions and further discussion
We have described in this article novel EGT models showing how prior commitments can be adopted as an efficient mechanism for enhancing coordination, in both pairwise and multi-player interactions. For that, we described technology adoption (TD) games where technology investment firms would achieve the best collective outcome if they can coordinate with each other to adopt a mixture of different technologies. To this end, a parameter
In the coordination settings, there are multiple desirable outcomes and players have distinct preferences in terms of which outcome should be agreed upon, thus leading to a larger behavioural space than in the context of cooperation dilemmas (Han et al., 2013, 2017; Han, Pereira, & Lenaerts, 2015; Hasan & Raja, 2013; Sasaki et al., 2015). We have shown that whether commitment is a viable mechanism for promoting the evolution of coordination strongly depends on
In the main text, we have considered that a fair agreement is arranged. In Appendix 1 (Figure 8), we have shown that whenever commitment proposers are allowed to freely choose which deal to propose to their co-players, our results show that, in a highly competitive market (i.e. small
In both pairwise and multi-player coordination settings, our analysis has shown that the cost of arranging agreement must be sufficiently small, to be justified for the cost and benefit of coordination. This is in line with previous works in the context of PD and PGG (Han et al., 2013, 2017; Han, Pereira, & Lenaerts, 2015). It is due to the fact that those who refuse to commit can escape sanction or compensation. Solutions to this problem have been proposed in the context of PD and PGG, namely, to combine commitment with peer punishment, intention recognition, apology or social exclusion to address non-committers (Han & Lenaerts, 2016; Han, Pereira, & Lenaerts, 2015; Han, Santos, et al., 2015; Martinez-Vaquero et al., 2017; Quillien, 2020) or to delegate the costly process of arranging commitment to an external party (Cherry & McEvoy, 2013, 2017). Our future work will investigate how to combine prior commitments with such mechanisms to provide a more adaptive and efficient approach for coordination enhancement in complex systems.
Prior commitments and agreements have been used extensively in the context of distributed and self-organising multi-agent systems, for modelling and engineering a desirable correct behaviour, such as cooperation, coordination and fairness (Chopra & Singh, 2009; Singh, 1991; Winikoff, 2007). These works however do not consider the dynamical aspects of the systems nor under what conditions, for instance, regarding the relation between costs and benefits of coordination and those of arranging a reliable commitment, commitment proposing strategies can actually promote a high level of desirable system behaviour. Thus, our results provide important insights into the design of such distributed and self-organising (adaptive) systems to ensure high levels of coordination, in both pairwise and multi-party interactions (Bonabeau et al., 1999; Pitt et al., 2012).
In future work, we will consider how commitments can solve more complex collective problems, for example, in a technological innovation race (Han et al., 2020), bargaining games (Rand et al., 2013; Zisis et al., 2015), climate change actions (Barrett, 2007; F. P. Santos et al., 2020) and cross-sector coordination (F. P. Santos et al., 2016), where there might be a large number of desirable outcomes or equilibriums, especially when the number of players in an interaction increases (Duong & Han, 2016; Gokhale & Traulsen, 2010).
Overall, our work has demonstrated that commitment is a viable tool for promoting the evolution of diverse collective behaviours among self-interested individuals, beyond the context of cooperation dilemmas where there is only one desirable collective outcome (Barrett, 2007; Skyrms, 1996). It thus provides new insights into the complexity and beauty of behavioural evolution driven by humans’ capacity for commitment (Frank, 1988; Nesse, 2001).
Footnotes
Appendix 1
Handling Editor: Alberto Antonioni, University College London, UK
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: T.A.H. is supported by a Leverhulme Research Fellowship (RF-2020-603/9). T.A.H and A.E. are also supported by Future of Life Institute (grant RFP2-154).