
Abstract
Tool use can be considered in terms of purposeful behaviour. This emphasis on ‘purpose’ hides a host of assumptions about the nature of cognition and its relationship with physical activity. In particular, a notion of ‘purpose’ might assume that this is teleological which, in turn, requires a model of a desired end state of an action that can be projected onto the environment. Such a model is fundamental to traditional descriptions of cognition and a version of this can be found in the ‘template’ theory of stone-tool production (i.e. where the maker of the tool has a model in mind and attempts to reproduce this model in stone). Against this cognitive perspective, a number of approaches have been proposed that share their roots in the work of Gibson (i.e. ecological psychology) or Bernstein (i.e. dynamic systems). From these perspectives, ‘purpose’ is not a matter of a projection but opportunity; put simply, an action is performed until it need not be performed further. Trivial though this might sound, it has implications for how we define purpose and how this might apply to our understanding of tool use. We argue from a dynamic systems perspective and demonstrate the use of tools to crack bones for marrow extraction.
Organista et al. (2019) report a survey of the Bell’s Korongo 3b site at Olduvai Gorge (dating from 1.35 Ma). They found evidence of cut marks on 29% of bone samples suggesting butchery and stripping of carcasses. The properties of tools for butchery can be considered in terms of their morphology, size, sharpness (Key & Lycett, 2019), the anatomy and strength of the tool user (Marzke & Shackley, 1986), the type of grip that the user can apply to the tool (Silva-Gago et al., 2019) and the posture that is adopted when using the tool (McGorry et al., 2004) . In other words, ‘… it is now well established that both the form of a stone tool and the biometric traits of the individual using it can influence its functional performance’ (Key & Lycett, 2019, p. 540). One would also add that the properties of the material to be cut, for example, hide, flesh and sinew, would have a bearing on the performance of these activities. These factors (the tool, the user, the materials on which the tool were used) can be considered a ‘tool-using system’ which can support and constrain activity (Baber, 2003, 2006). In this article, we will argue that the organisation of such a system constitutes a form of cognition in which purposeful action emerges from the inter-relationships within this system.
Organista et al. (2019) also found evidence of bone breakage on 533 bones, with some 193 long bones showing green breakage and others showing dry breaks ‘… which suggests a biotic agent of bone-breaking’ (p. 125). There is evidence, from archaeological and modelling studies, of stone tools being used on the bones of large fauna (Binford, 1981, 1983; Blumenschine, 1988, 1995; Capaldo & Blumenschine, 1994; Mora & de la Torre, 2005; Pante, 2013). In another recent analysis, ‘The overall incidence of percussion marking at HWK WW suggests hominins were breaking the majority of limb bones for marrow extraction …’ (Pante et al., 2018, p. 231). Interestingly, Arroyo and de la Torre (2018) have suggested that ‘percussive objects’ recovered from Olduvai Gorge indicate differences in purpose: with stones from EF-HR (1.6–1.5 Ma) more likely to be associated with stone-tool production and stones from WHK EE (1.7 Ma) more likely to be used for bone breaking or bipolar knapping. However, while much of the experimental archaeology research has focused on the use of sharp flakes and handaxes for butchery (Toth & Schick, 2018), less work has considered percussive actions relating to bone breaking. There might, perhaps, be an assumption that such activity need not require well-formed stone tools or to represent particularly ‘skilled’ activity.
In her consideration of ‘non-knapped stones’ in the archaeological record, de Beaune (2000) notes that ‘Certains objets ont souvent été négligés par les préhistoriens, qui les jugeaient trop humbles’ (p. 98) and such ‘trop humbles’ objects could be used for activity such as ‘du concassage des os en vue de l’extraction de la moelle …’ (p. 98). Hammering to open a bone for the extraction of marrow could be similar to hammering to open a nut (Toth & Schick, 2009). However, as we will suggest later in this article, the superficial similarities of these percussive tasks hide particular differences that have implications for the choice of tool to use and how it is used (and for the notion of cognition that we are posing). Accessing bone marrow is a distinctly different task than slicing through hide, butchering an animal or scavenging of meat from a carcass. Consequently, one might expect the hammerstone, handaxe or cleaver that is used for bone cracking to differ from tools used for these other forms of butchery.
To appreciate whether a particular stone could be appropriately utilised, there needs to be an appreciation of purpose. The term ‘purpose’ suggests an organisation of movement that is directed towards a goal (and goal-directed behaviour is a well-recognised and popular definition of ‘cognition’). The use of the word ‘organisation’ here is important because, to successfully perform a percussive task, there are several choices which need to be made. These choices imply some mechanism that organises the movement and anticipates the consequences of movement on a goal.
For bone cracking, the goal is to access the marrow inside the bone (presumably while also minimising the risk of bone fragments contaminating the marrow). In the study of human motor control, a common approach to questions of goal and organisation of movement assumes a centralised, brain-based ‘action generator’ that defines and manages movement. Such a control mechanism is assumed to provide the requisite organisation, in terms of action selection, sequencing, timing and so on. These ideas have a well-established history across movement science (Keele, 1968; Schmidt, 1975) and are predicated on fundamental assumptions of internal (mental) models. In robotics, this approach is often defined in terms of ‘sense-model-plan-act’ (Brooks, 1991). Such models propose that data are extracted from the environment through our senses, these data are then used to reconstruct an internal model of the environment, and this model is used to plan actions and project consequences of these actions. In this article, we term such approaches ‘cognitivism’.
An alternative approach assumes that ‘… Control lies in the animal-environment system …; behavior is regular without being regulated’ (J. J. Gibson, 1979, p. 225). Such a ‘system’ is, therefore, defined by ‘constraints’ (Newell, 1986) which arise from the animal, the environment and the task, and which help the system to self-organise to maintain stability (or homeostasis). Self-organisation requires feedback loops between animal and environment, such that the state of the environment provides opportunities for the animal to act, and the animal’s actions change the state of the environment. From this perspective, an acceptable outcome is one that satisfies these constraints as far as possible. Broadly speaking, one can assume that, given the constraints imposed by its own ability, the animal performs activity that is most appropriate to the task constraints within a given environment. The focus of such an approach should be less on the ‘tool-as-object’ than on the appreciation of how tools can be used by the animal to operate within these constraints. It is the manner of operating within these constraints that we consider to be a defining aspect of ‘purpose’.
The most common way of considering these constraints on performance is to apply Dynamic Systems methods that draw on control-theoretic models of activity (see Haken et al., 1985; Kelso et al., 1986; Kugler & Turvey, 1987). These approaches stem from the work of Bernstein and his definition of the Degrees of Freedom problem in human movement (Bernstein, 1967). That is, any movement, say of the hand, arm and tool, involves joints which can be rotated in different directions (or ‘degrees of freedom’ in their movement) and controlled action requires these degrees of freedom to be minimised (while also allowing sufficient variability to cope with changes in the situation). For Bernstein (1967), solving the degrees of problem most likely involved a hierarchy of control actions, moderated by feedback to allow adaptation. More recent variations of this, for example, ‘synergetics’ (Fuller, 1975; Haken, 1977) describe self-assembly of systems, through the alignment of elements to create behaviour that cannot be predicted solely through consideration of individual elements. In the study of human movement, this has inspired research into coordinated, rhythmical movement, from finger-tapping (Haken et al., 1985) to sawing (Starke & Baber, 2017). In this approach, an Order parameter defines the system (i.e. states in which the system is stable, or ordered), Control parameters manage Order within the system (i.e. actions which can be performed) and the relationship between Order and Control parameters can be captured mathematically. From this perspective, the ‘purpose’ of the system is to manage and maintain Order. In a similar manner, the well-known work of Bril and her colleagues defines activity in terms of the functional parameters of a given task (Biryukova & Bril, 2008; Bril et al., 2000, 2005, 2009, 2010, 2012; Parry et al., 2014; Rein et al., 2013; Roux et al., 1995). In this work, the human seeks to manage the functional parameter which defines and constrains the outcome of the task, for example, the most appropriate level of kinetic energy to apply when knapping flint. These ideas fundamentally challenge the ‘cognitivist’ approach through their emphasis on ‘reasoning’ as the dynamic engagement of the animal in discovering and responding to task constraints (rather than the creation of a ‘model-in-the-mind’ that fully specifies the route to a goal that cognitivism assumes). Rather than assume that all of this information is encapsulated in the mental model and motor programme of the actor (as cognitivism might assume), a Dynamic Systems approach focuses on the performative aspects of the activity and the ‘coordinative structure’ (Bernstein, 1967) which the actor applies to the task. Repeated performance of a task, such as hammering with a stone, results in a combination of joint and muscle activations which occur in synergy. Think, for instance, of what it feels like to play a shot in golf or tennis where you ‘know’ that this is ‘good’ (or ‘bad’) because the activation of joints and muscles ‘feel’ right and the movement has a kinetic melody (Luria, 1973) arising from the familiar feeling of the action.
Percussive actions, such as hammering, pounding or cracking open a bone, might appear to involve less ‘cognition’ than either cutting and scraping or flint-knapping, but such actions still require knowledge of the purpose to which the tool is being put. Dexterity in tasks such as flint-knapping improves with practice (Geribàs et al., 2010; Hovers, 2009; Nonaka et al., 2010) and requires an appreciation the ways in which impact of hammerstone is controlled. This is not simply a matter of the actions involved in knapping but characteristic of other percussive actions (Bril et al., 2012). For example, a study of modern hunter-gatherers, the !Kung people, Bock (2015) noted a marked effect of age of ability to crack nuts using stones (with performance peaking in the mid 30s). That this ability can improve with time suggests that there is more to hammering than meets the eye. This suggests that learning to perform an activity is a matter of configuring the system; that is, selecting an appropriate tool, selecting an appropriate posture and grip, performing an appropriate movement, anticipating the outcome (to modify these parameters) and judging the outcome.
In observations of monkeys, Mangalam et al. (2016) found that ‘wild bearded capuchins modulated kinematic parameters … according to type and condition of nut’ (p. 34). Interestingly, they observed that the monkeys applied negative effort when using heavy stones, presumably to control point of impact and velocity, maintain stability or reduce injury. In her account of capuchins’ pounding and digging activity, Mosley (2021) notes how these can be considered in terms of their broader patterns of destructive foraging. As such, the tool-using activity is not simply about the ‘tool’ per se, but about the relationship between capuchin and environment such that … digging tools may act to re-inforce the affordance relevance, confirming the presence of food resource even when the capuchin cannot see it …, as if tool use by revealing the nature of the foraging problem, were also drawing forth the intent to solve it. (p. 6)
The ‘technical reasoning’ (Osiurak, 2020) or ‘mechanical reasoning’ (Overmann & Wynn, 2019) involved in tool use is guided by perception-action coupling (J. J. Gibson, 1979). That is, the animal’s perception is tuned to features of the environment upon which it can act. As a simple example, the visual perception of a bee means that it cannot see the colour red but can see in the ultraviolet spectrum which (as well as sensing differences in electrical charge) allows it to detect pollen in flowers. This illustrates that the relationship (between animal and environment) is as much a matter of the capabilities of the animal as it is of the state of the environment, for the ‘affordances’ of the task (J. J. Gibson, 1977, 1979; Wynn, 2021). For this article, we assume that ‘affordances’ emerge from the animal–environment system as the product of the features of the environment salient to the animal’s intent, the capabilities of the animal to perceive these features, and the desire and capability of the animal to respond to these features.
Taken together, these principles from Dynamic Systems and the concept of affordance form the basis of Radical Embodied Cognitive Science (Chemero, 2013). This suggests that organisation of behaviour is not caused by a central controller but emerges as a consequence of interactivity within the animal–environment system. This means that, rather than seeking to describe a motor programme which causes movement, it would be more beneficial to describe the context in which movement occurs. While this might feel as if it reasonably describes action, it leaves open the question of how a purpose might be defined. In ‘cognitivist’ accounts, a purpose is similar to a goal and is determined prior to movement to define the quality of the outcome of this movement. In this, the purpose could be considered in terms of a ‘mental model’ of the future state of the world to which the action is directed. For dynamic systems accounts, the state of animal, for example, hunger, provides initial impetus for action, and the state of the environment, for example, prey, provides opportunity for action in terms of the capability of the animal, for example, whether it can run fast enough to catch the prey, which leads to an outcome, for example, prey being caught and eaten. Rather than cognitivism’s prospective argument (that purpose produces an outcome), a dynamic systems approach favours a retrospective argument (that the outcome can be described by a purpose). A consequence of this distinction is that actions (for the dynamic systems approach) are more likely to be opportunistic, more likely to rely heavily on situational factors, more likely to vary with the capabilities of the actor, and more likely to be justified after the event (rather than necessarily assuming that one must have a goal to act). Furthermore, given the focus on the human–tool–environment system, one can appreciate that changing any of these elements could have a bearing on the outcome.
1. Cognitive archaeology and ‘Cognitivism’
From his discussion of the role cognitive science in lithic analysis, Mahaney (2014) concludes that, ‘Evolutionary cognitive archaeology is in need of a general theoretical framework with which to approach lithic technology’ (p. 184). Having said this, the concept of ‘cognition’ used in ‘cognitive archaeology’ differs considerably (Ambrose, 2001; Coolidge & Wynn, 2009; Davidson, 2010, 2016; de Beaune et al., 2009; K. R. Gibson & Ingold, 1993; Isaac, 1986; Wynn, 1991, 2002).
We do not intend to unravel the threads of these various positions in this article (some of which are closer than others to the line that we are taking). However, we agree with Malafouris (2013) in his argument that there are three ‘commitments’ on the way that tool use is commonly discussed in the archaeological literature and which suggest a commitment to cognitivism: ‘[O]ntological’ commitment … Intentionality is a necessary condition of artifactuality … ‘[A]gentive’ commitment … The human agent (i.e., the knapper) ‘imposes’ the intended ‘form’ on the object … ‘[T]emporal’ commitment … The form of the object exists before its objectification in stone. (Malafouris, 2013, p. 163)
Taken together these ‘commitments’ emphasise the tool user having a goal in mind and seeking to use or make a tool to produce an outcome that matches this goal, that is, a commitment to cognitivism Malafouris rejects and that we question in this article. Indeed, if one accepts Malafouris’ proposals, then stone tools can be thought of as ‘… genuine cognitive extensions or prostheses … [and] … the standard interpretation of material culture as mere leftovers of our cognitive processes … can be questioned’ (Chakrabarty, 2019, p. 259). Given advances in the taphonomic analysis of bones and micro-analysis of bones and stone tools (Arroyo & de la Torre, 2018; Organista et al., 2019), it is possible to build detailed notions of the outcomes of tool use from the marks left on bones and stone tools (e.g. in terms of bone cracking, scraping and flesh cutting) and this continues to raise the question of what ‘cognition’ was necessary and sufficient to enable such activity?
In his discussion of ‘handaxe enigmas’, Wynn (1995) asked whether (given their symmetry) early stone handaxes could have been produced without a ‘concept’ of a handaxe? However, arguing from a worked tool to cognition involves what Davidson (2002) calls the ‘finished artefact fallacy’; he points out that one cannot treat a stone tool as a record of the maker’s intentions. Davidson (2002) suggests that the similarity of forms across different stone tool assemblages could reflect the ways in which stone as a material responds to particular processes of flake removal (as opposed to the tool makers imposing a form on the stones).
In recent work, Moore and Perston (2016) demonstrate that Oldowan and Acheulean tools could be produced from more or less randomised flaking. That is, handaxe forms, particularly the more basic ones, have symmetry because of the production technique rather than from specific plan or application of ‘mental template’ (Noble & Davidson, 1996). From this, one might assume that learning to perform these basic actions in an appropriate sequence could be sufficient to produce a recognisable handaxe. Indeed, one of the authors of this article (K.J.) notes that teaching people to produce Oldowan tools is relatively straightforward and requires only a small number of actions, together with an appreciation of how impact forces remove flakes. In an extreme example of this position, Moore (2011) proposes that knapping is ‘cellular’, that is, each cell comprises a set of basic movements, such as rotating, placing, tilting and striking. Combining these basic movements need not require ‘cognitive control’ so much as the mapping of stimulus to response in some simple learned response. However, reducing knapping solely to the sequence of physical actions fails to reflect the ways in which expert knappers perform differently to novices (Biryukova & Bril, 2008; Bril et al., 2000, 2005, 2009, 2010, 2012; Nonaka et al., 2010; Rein et al., 2013; Roux et al., 1995).
Gowlett (2006) provides a valuable analysis of the form of stone tools. As an aside, Gowlett has often (oddly and wrongly) been blamed (or, at least, cited) for the idea of a ‘mental template’. From the archaeological record, Gowlett (2006) identified several ‘imperatives’ of stone tools. These imperatives relate to the form of the stone, for example, glob-butt, forward-extension (relating to centre of gravity and distribution of mass), support for working edge, lateral extension (around the major plane), thickness adjustment and skewness. This set of imperatives is expanded upon by Wynn (2021) to relate their form to generic functions to which they can be applied. Gowlett argues that, ‘… biface manufacture cannot be governed by a simple fixed “mental template,” since this would yield neither the fields of variation within a dataset, nor the local variations observed from site to site and even within sites’ (Gowlett, 2006, p. 4, our emphasis).
Gowlett’s (2006) imperatives address the geometries (and symmetries) that are possible given the material and the tasks of knapping. Each of these imperatives is directly tied to the tools’ functionality, mechanics, kinetics, ergonomics and ease of manufacture. Within this model, Gowlett (2006) includes assessment criteria such as the amount of lateral extension made possible by the tool, the nature of the end opposite the tip, that is, held in the hand (‘Glob Butt’), and the amount of support for the working edge provided by each tool. We suggest that producing a tool to meet these criteria requires an appreciation not only of how particular material responds to knapping activities but also to the purpose to which the resulting tool will be put. In short, The production of stone tools reflects levels of cognitive engagement that are not seen in animals. Cognition is not so much pre-planned and schema-driven as opportunistic, allowing for a flexible response to changes in the properties of the objects being worked. Furthermore, the overall goal is not the immediate consequence of using the tool, so much as the production of a tool that can be used for future activities, and that can be reused. (Baber, 2003, p. 50)
2. On tool use
The distinguishing feature of tool use behaviours is the manner in which the tool is incorporated into an actor–environment system. One purpose of using a tool is to extend one’s ability (i.e. within an organism’s constraints) to effect appropriate changes upon the environment. Another is to redefine the goal (i.e. within environmental constraints) and how this can be achieved (i.e. within task constraints). In broad terms, tool use embraces (1) appreciation of the relationship between material and activity in the manipulation of objects as tool; (2) selection of material to use as objects for tools and as objects to work; (3) motor-control abilities to support dexterity in the manipulation of objects as tools; and (4) biomechanical and anthropometric factors that support the grasp and manipulation of objects as tools. Each dimension plays a key role in the ability to engage in purposeful behaviour, those dimensions being mutually dependent. For example, manipulation would be influenced by (and influence) choice of grasp which might relate to choice of posture and to possible movements to perform using the tool.
To pre-empt the discussion of our study reported below, consider using a stone as a hammer on bone: sitting or kneeling and holding the stone in one or two hands necessarily has impact on the biomechanics of the movements that are possible; in a similar manner that the ways in which posture affects forces in modern butchery (McGorry et al., 2004). We propose that, additionally, changes in posture or grasp of the tool affect the dynamics of the system and hence the definition of purpose that would be most appropriate to this activity. In this case, the ‘tool’ is not merely an object associated with movement sequences. Rather, the tool mediates the interactivity between tool user and environment, both in terms of movement and in terms of perception (the tool directs the user’s attention to that specific region of the environment that is being worked on as much as the user directs the movement of the tools to that region). As the tool changes the state of the environment, so this (through sensory feedback loops) changes the perception of the tool user, and the movements that need to be performed. As Samuel Butler (1912) puts it, ‘Strictly speaking, nothing is a tool except during use’.
3. A purposeful use of stone tools: cracking bones
The stone tool typological systems currently used within archaeology tend to focus primarily on the manufacturing process, or describe generalised shapes, but do not often offer much in the way of interpretive value for telling us about their purpose. For this article, we note that, by addressing the problem of bone cracking, we can explore how the ergonomics of tool use (tool geometry and mechanics) allow comparative assessment of the activities of meat ‘cutting’ versus bone ‘splitting’. Our goal was to consider a distinct ‘problem’ to be solved that has not been addressed in the literature to a great degree, the task of accessing bone marrow.
Prior experimental archaeology work has shown that flakes can be remarkably effective for butchery (Schick & Toth, 1993). Instead of cutting or sawing actions, bone marrow acquisition requires a tool that can cleave, chop or wedge into a hard material. From this, one can assume that the technical problem to be solved involves specifying an appropriate degree of impact force, sufficiently localised on the bone, to break into the bone and expose the marrow. This begs the question of what type of ‘tool’ would be appropriate for this activity? By analogy with nut-cracking, one might anticipate that a hammerstone of sufficient mass would be appropriate. As such, a pebble core might be more suitable than a crafted stone tool.
We conducted a laboratory study in which several stone-tool forms were used to crack large bones from cattle. Full details of these studies and the analysis of data will be reported in a separate paper. One author (K.J.) manufactured a variety of stone tools common to the Lower Palaeolithic with the goal of extracting bone marrow from large bones such as those of mega-fauna carcasses that might have been found in a Lower Palaeolithic context (in this study we used bones from the legs of cows, see Figure 1). In this activity, bovid leg bones were laid in a flat surface (the Kistler force plate on the floor). We note that there is evidence that bones might have been hammered on anvils (Mora & de la Torre, 2005), and this could be a focus for future study.

Photograph of experimental task. A stone tool is held in the right hand and brought into contact with a beef leg bone (the blow is aimed at the knuckle between upper and lower leg). Retroreflective markers are attached to the headband, the arm, waist and chest, for Motion Capture; wireless electromyography sensors are placed just above the elbow joint; the bone is placed on a hard, flat surface (a Kistler Force Plate covered in cloth to make cleaning easier); high-speed video cameras (positioned around the laboratory) are used to record the activity. Joint angles for biomechanical modelling are superimposed on the image.
3.1. Using a pebble core
If cracking bone was solely a matter of exerting maximal impact force, then a round pebble might be the most appropriate object to use. Figure 2 shows a pebble of dense, igneous rock with low silica content. The pebble had been worked using short angular percussion for broad flake removal around the perimeter of the stone. There was no attempt to bifacially thin the tool. Production time was less than 5 min and required little skill (although one would need some awareness of the effects of using a hard hammerstone to fracture this material).
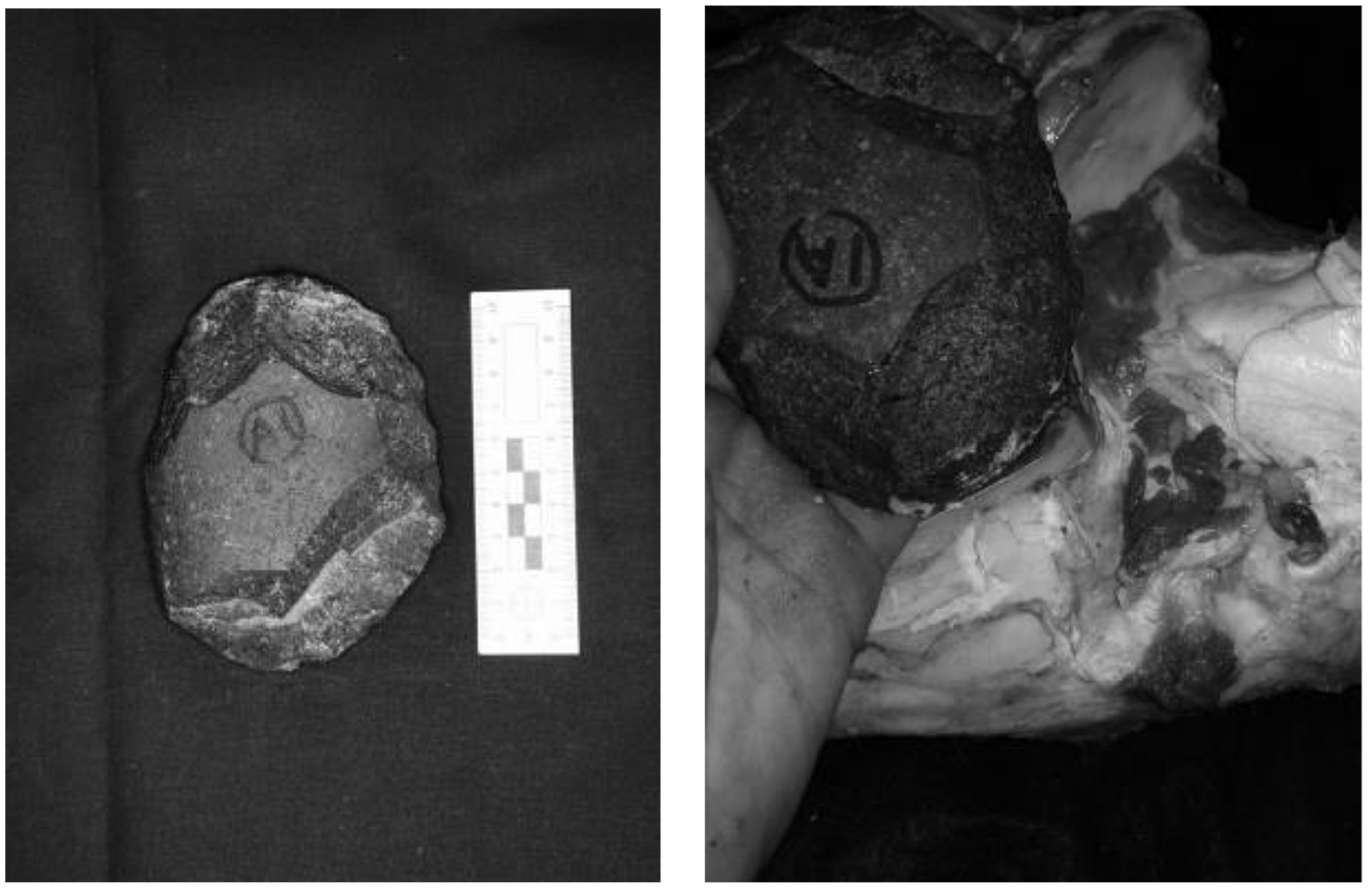
(Left) Pebble Core (long axis length 120 mm; maximum thickness 37 mm; maximum width 90 mm; mass 0.526 kg); (right) Pebble Core impacting knuckle bone.
The edges of this stone were not sharp enough to cut meat effectively. This, together with the mass of the stone, suggests that it would have been wielded as a cleaver. The size and shape of the stone made two-handed grip somewhat difficult (although not impossible) and a one-handed grip was preferred – not only for comfort but also for perceived accuracy of impact. On average, the kinetic energy calculated when using this tool was 11.8 N, which was sufficient to result in breakage and shallow fracture of the bone after two or three blows.
3.2. Using a well-knapped handaxe
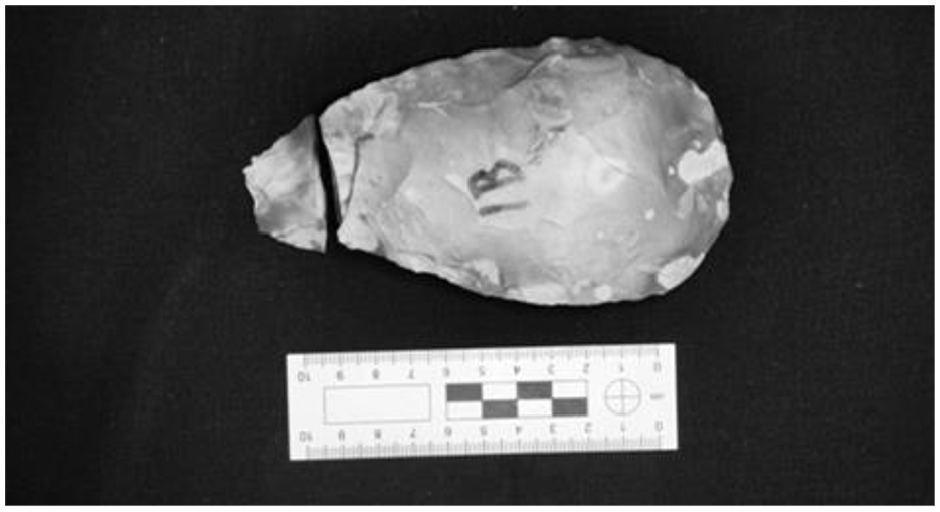
Figure 3 shows an example of a well-formed, bifacial stone tool. This took the knapper (K.J.) approximately 30 min to produce, with an emphasis on symmetry and bilateral working. This was made from an elongated oblong of Anglian flint, with high silica content.
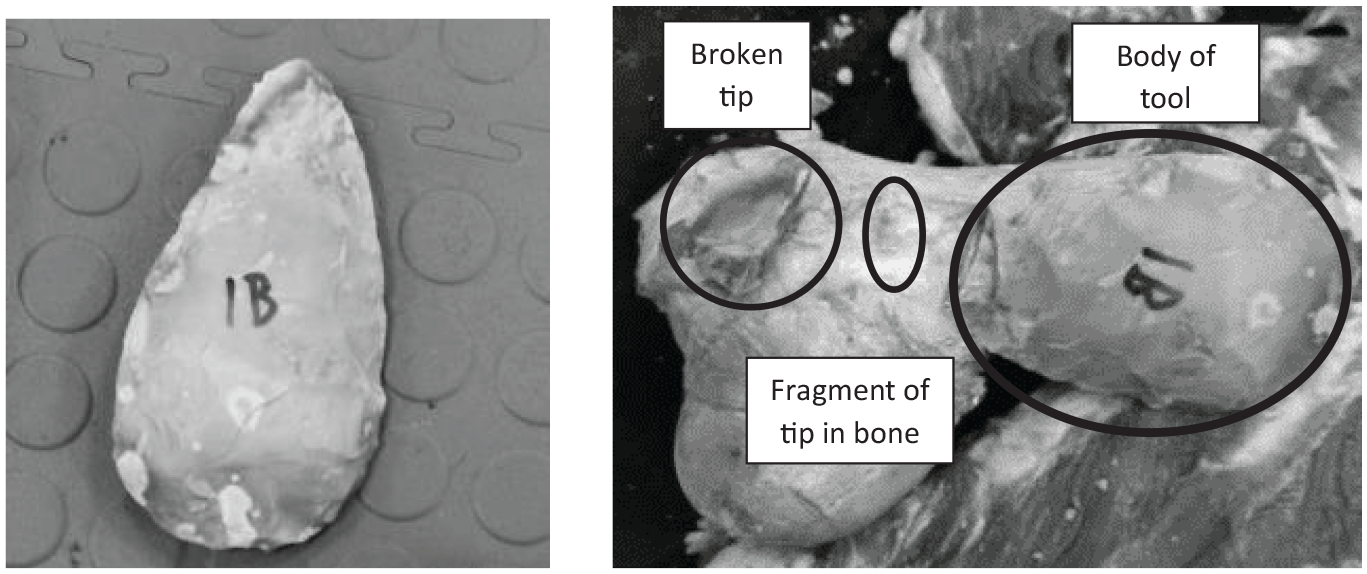
(Left) Handaxe modelled after ‘late Acheulean’ (long axis length 140 mm; maximum thickness 33 mm; maximum width 80 mm; mass 0.279 kg); (right) handaxe broken after second hit.
The edges of this tool were sufficiently sharp to easily slice meat, sinew and tendon. This is the type of tool and the type of butchery activity that is mentioned quite often in the literature. However, this tool was completely ineffective for bone cracking. The tool was used in either one- or two-handed grip but calculated kinetic energy averaged 4.9 N (i.e. around half that of the pebble). The pointed tip of the tool encouraged ‘aiming’ of this point to the impact location on the bone (meaning that the stone was raised less high than the pebble, which reduced impact force). More significantly, perhaps, the impact was painful, partly because the narrow edges on the tool’s glob-butt and partly because the thinness of the tool channelled the impact force to the hands and fingers with little absorption of the shock (even when the tool had a piece of leather held over the glob-butt). We tested tools of similar form, either one-handed or two-handed, and produced similar results. This tool is particularly noteworthy in that it broke on impact (see Figures 3 and 4). A similar tool broke in identical fashion during testing and we note, in passing, that the fracture that this activity produced has been observed in the archaeological record.
Fracture of ‘late Acheulean’ handaxe, showing how the tip is broken off.
3.3. Using a crudely fashioned handaxe
There is, perhaps, a feeling within the archaeological community that a less well-formed tool is not only inferior (in appearance) but might also be less useful. Given that so much of the archaeological record comprises less well-formed tools, one might either assume that these are ‘apprentice pieces’ that are discarded because knappers are working towards superior, well-formed pieces, or that these pieces are just the ‘cores’ from which to take flakes. Figure 4 shows a crudely fashioned handaxe made from silica and fossil-rich limestone slab. Production of this tool took as little time as the pebble, that is, around 5 min. Such tools are commonly found in the archaeological record and might correspond to the ‘non-knapped’ tools of which de Beaune (2000) refers to as ‘trop humbles’ for archaeological research (albeit that this, like the pebble, has minimal modification rather being an unworked stone). Indeed, in their analysis, Arroyo and de la Torre (2018) note that the ‘subspheroid’ stones they examined bore ‘battering marks’ which suggested that ‘flaking took place before the tools used in percussive activities’ (p. 405).
The edge of the handaxe shown in Figure 5 was almost ineffective at butchering. However, this tool was very effective as a hammer, with an average kinetic energy of 35.3 N. The kinetic energy was, obviously, a function of the larger mass of this stone, but was also imparted by the user’s activity (with the stone being raised higher, than the well-knapped handaxe, prior to impact). Notice also that, in comparison with Figure 3, the ‘tip’ of this tool is much less well defined; the flatness of this ‘tip’ was ideal for channelling impact force and, in a sense, ‘corrected’ for any imprecision in ‘aiming’. The large, worked aspects of the glob-butt of the tool allowed for a solid grip (one or two handed) and even distribution of force while swinging downwards. The shape of the tool also distributed the impact on the hands over a broad, uniform area, reducing the pain from impact. The tool’s broad ‘shoulders’ (the widening below the glob-butt) meant that it was easier to control the point of impact while using two hands to deliver a blow. The tool’s shape and the grip this allowed meant that it was possible to manipulate the tool in a way that resulted in the hands having a 45° inward grip, effectively channelling the muscular force of hands and forearms inward and down to control the centripetal force of the swing. Thus, this tool felt precise and had the least amount of negative vibratory feedback on the hands. It was also the most successful of the three in quickly penetrating the bone, typically with a single blow.
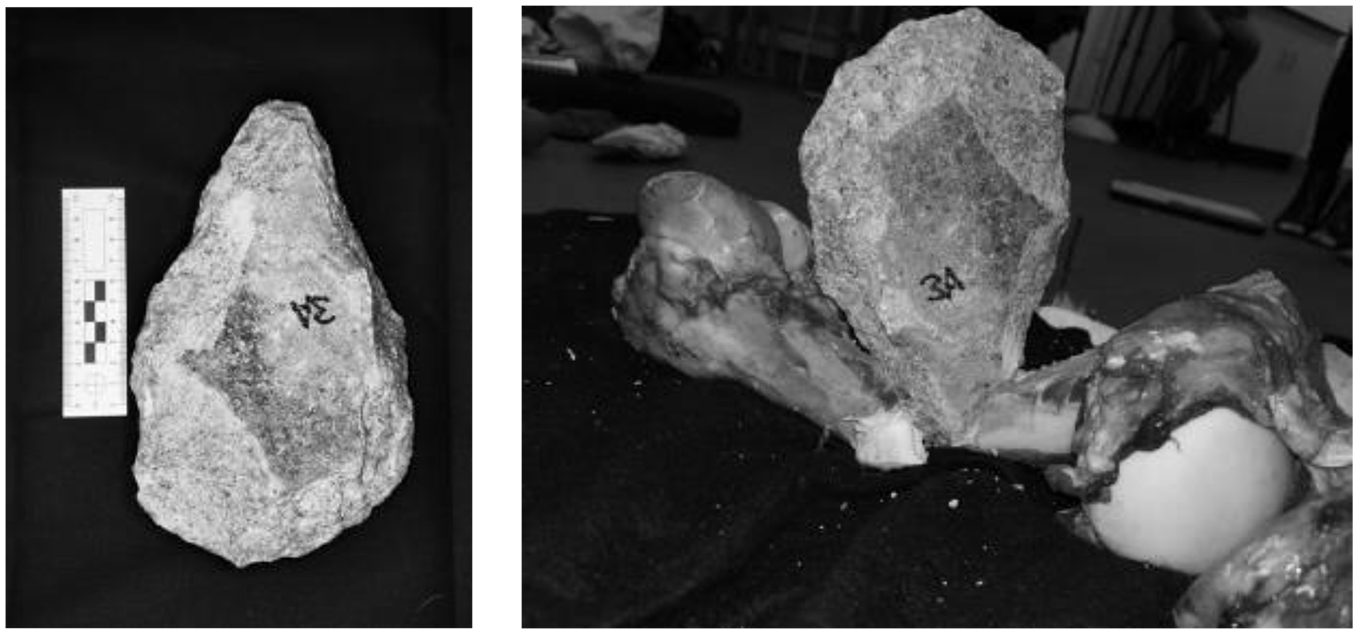
(Left) Handaxe modelled after ‘Early Acheulean’ (long axis length 220 mm; maximum thickness 50 mm; maximum width 150 mm; mass 1.51 kg); (right) bone cracking using this handaxe.
3.4. Conclusion
This initial account of our experiments lead us to conclude that many of the stone tools of the Lower Palaeolithic make more sense when applied to wedging and splitting of bone as opposed to butchering of flesh. This has significant implications for the interpretations of the manufacture, curation and use of these tools. Understanding the functionality of tools, in terms of their purpose and the likely ergonomics of their use, also helps explain their form (de Beaune, 2000). We note that the more aesthetically pleasing ‘well-knapped’ tool was ideal for butchery but useless for marrow extraction.
At its most basic, this task of bone cracking for marrow extraction involves delivering force with sufficient kinetic energy to split the bone. The tool user needs to reason about several aspects of the task, such as the selection of the tool, the choice of grip and posture, how high to raise the stone, and the velocity with which to deliver the blow. After experimenting with squatting, the preferred posture for this study was kneeling. We note that squatting might be preferred in other cultures, but it felt unbalanced, particularly at the point of impact when the body was being thrown forward. Using two hands creates an isosceles triangle of the arms, reducing the degree of freedom for movement, creating a kinematic chain of Revolute Joints of the shoulder, wrists and fingers. The shoulders are locked together in the movement downwards by the hands that are pulling inward at the same angle towards the target. This inward pressure creates a more uniform centripetal force.
More significantly, there is no need to invoke a specific mental template to achieving the specific shape of the tools we present here. Rather, what is required is sufficient experience of the purpose to which the tool will be put. This means that a tool will be created with the attributes for a specific purpose, that is, to satisfy a particular functional constraint (Bril et al., 2000). From experience in practising this task (i.e. bone cracking), the tool user has a coordinative structure (in terms of posture, grip, biomechanics) that can be applied to the environment. This need not be a ‘mental template’ (stored in the brain) but could simply be the ‘normal’ (i.e. familiar and accepted) way in which the action is performed with a tool for a specific purpose within a particular group. Hefting a stone on the basis of this experience and the purpose of this task could be sufficient to determine whether the stone is appropriate in its original state, or whether it needs modification.
There is a further implication in the reframing of human behavioural and subsistence adaptations that arise from accessing bone marrow that can be inferred from the stone tool record of the Lower Palaeolithic. These implications are made more pronounced when considering the adaptive advantages implied by the ability to regularly exploit bone marrow as a food source. Marrow has about four times the caloric density of skeletal muscle tissue, and marrow may persist in an edible state in a bone long after the ‘meat’ has been stripped. This could be a further explanation for the green fractures of bones observed by Organista et al. (2019). Bone marrow also has a much lower metabolic cost associated with its digestion than meat or vegetable material, essentially being what might be viewed as a partially pre-digested food, creating even greater adaptive pressure to access marrow.
4. Discussion
There are synergies between a dynamic systems approach outlined in this article and Material Engagement Theory (MET) beyond differences in methodology. Here, we consider three of the defining elements of MET: materiality, intentionality and embodiment. For MET, the nature of the material and the way that it responds to being worked is crucial to an understanding of material culture. These define the choice of material to use as a tool (and the nature of the material to be worked), for example, in terms of the mass of a hammerstone for knapping. This is partly a matter of appreciating the affordances of specific materials and objects and partly a matter of understanding the role of the material in defining the functional constraints of the task. That is, in bone cracking, the use of a stone of lower mass could result in damage to the stone, limited breaking of the bone or discomfort to the hand. The material used will be one of the factors that influence technique (e.g. one- or two-handed grip, kneeling or squatting, degree of precision of the impact).
Malafouris (2013) argues that Wynn’s (1995) ‘handaxe enigmas’ point to a fundamental question about intentionality. For Malafouris (2013), … the stone held in the knapper’s hand did much more than simply and passively offer the necessary ‘conditions of satisfaction’ to the knapper’s intention … I believe that the directed action of stone knapping does not simply execute but brings forth the knapper’s intention. The decisions about where to place the next blow and how much force to use are not taken by the knapper in isolation; they are not even processed internally. The flaking intention is constituted, at least partially, by the stone itself. (p. 173)
This reflects the ‘skilful coping’ (Merleau-Ponty, 1962) of the tool user. While the knowledge required to use tools in this manner might be dismissed as ‘procedural’ or ‘tacit’ (because it does not fit squarely with the ‘cognitivist’ account), it is integral to MET.
From a dynamic systems perspective, intentionality can be considered from two perspectives. The first concerns Bril’s insistence that the tool user needs to appreciate the functional constraints of the task. This means that the tool user will be seeking to make sense of the Control parameters which can achieve the system’s Order parameters. Only some of these Control parameters can be affected by the tool user, either through their selection of material or through their movement. In this way, the ‘bringing forth’ of purpose is a matter of satisfying the Order parameters of the task.
The second aspect of intentionality comes from operationalising human, task and environment constraints (Newell, 1986). This allows definition and analysis of factors which contribute to efficient tool use. Of these factors, some are inherent properties of the object being used as the tool and the material being worked (and the tool user needs to recognise these and select objects appropriately); some are properties of the manner in which the tool is used (and the tool user needs to appreciate the relationship between use and outcome); and some are the outcome of the physics governing the impact of tool on material (over which the tool user has less control). Appreciating the relations between these factors means that we should consider the situation in which the tool is used, for example, extracting marrow, opening a nut, over and above the process of manufacturing the tool.
Wynn and Coolidge (2016) note that ‘much of hominin cognitive evolution was co-evolutionary with material culture. Artefacts played a critical scaffolding role from at least the beginning of stone knapping’ (p. 211). Consequently, the behaviour of the actor is driven by the ergonomics of the task. Purposeful tool use entails the actor making changes in the coupling between self and the environment through a tool. Ultimately, successful achievement of the outcome requires that the actor appreciates and satisfies the task constraints (Biryukova & Bril, 2008; Bril et al., 2000, 2005, 2009, 2010, 2012; Nonaka et al., 2010; Rein et al., 2013; Roux et al., 1995).
In this article, our modest proposal is that selecting and using tools for bone cracking (and marrow extraction) are qualitatively and quantitatively different from other uses of stone tools and that producing appropriate tools requires appreciation of these demands. We note that task constraints extend beyond the production of the tool and encompass the purpose to which the tool will be put. These constraints would come under the heading of ‘displaced affordances’ (Wynn, 2021) in that the purpose (as a future function of the tool) contributes to an understanding of its form and use. So, as noted above, an appropriate tool for cutting and slicing need not be appropriate for bone cracking (and vice versa). While this observation might feel mundane, we propose that it has implications for understanding the ergonomics of stone tools as functional artefacts and reiterates de Beaune’s (2000) advice to understand the activities that can be performed with stones, even those which might appear ‘trop humbles’. From our brief presentation of bone cracking using three different stone tools, we propose that separating the ‘biomechanical’ (in terms of impact force), from the ‘sequence construction’ (in terms of defining constraints and planning the required movements), from ‘cognitive control’ (in terms of choice over stone, control movements, etc.), makes little sense. Rather, approaches which focus on the purpose of tool use provide the ‘general theoretical framework with which to approach lithic technology’ for which Mahaney (2014) calls.
Footnotes
Handling Editor: Thomas Wynn
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.