
Abstract
In this paper, the role of adaptive group cohesion in a cooperative multi-agent source localization problem is investigated. A distributed source localization algorithm is presented for a homogeneous team of simple agents. An agent uses a single sensor to sense the gradient and two sensors to sense its neighbors. The algorithm is a set of individualistic and social behaviors where the individualistic behavior is as simple as an agent keeping its previous heading and is not self-sufficient in localizing the source. Source localization is achieved as an emergent property through agent’s adaptive interactions with the neighbors and the environment. Given a single agent is incapable of localizing the source, maintaining team connectivity at all times is crucial. Two simple temporal sampling behaviors, intensity-based-adaptation and connectivity-based-adaptation, ensure an efficient localization strategy with minimal agent breakaways. The agent behaviors are simultaneously optimized using a two phase evolutionary optimization process. The optimized behaviors are estimated with analytical models and the resulting collective behavior is validated against the agent’s sensor and actuator noise, strong multi-path interference due to environment variability, initialization distance sensitivity and loss of source signal.
Keywords
1 Introduction
Over the last decade, swarm robotics has gained significant research momentum owing to its promise in solving real world problems (Blum & Groß, 2015; Brambilla, Ferrante, Birattari, & Dorigo, 2013). Swarm robotics can be seen as an approach that studies the emergence of a desired collective behavior from the local interactions of agents among themselves and with their environment (Şahin, 2005). The agent behaviors may either be individualistic or social. Individualistic behaviors refer to agent’s rules that only define interactions with its environment and/or reaction to its internal state. The social behaviors refer to the agent’s rules of interaction with its neighbors.
In swarm robotics, foraging has been the main testbed application (Brambilla et al., 2013). It has been used for investigating navigational behaviors such as collective exploration (Ferrante et al., 2012), collective transport (Ferrante, Brambilla, Birattari, & Dorigo, 2013) and collective decision making (Gutiérrez, Campo, Monasterio-Huelin, Magdalena, & Dorigo, 2010). Source localization can be thought of as a subproblem of foraging, in which it benefits from collective exploration and collective decision making behaviors. The recent events of aircraft crashes in the sea (Normile, 2014), algal blooms in water bodies (Michalak et al., 2013) and oil spills undersea (Camilli et al., 2010) have underscored the importance of developing a swarm robotic system which can localize sources of interest in the real world.
Practically, there are two main concerns that need to be addressed for a cooperative source localization problem. First, we need to define the method of gradient sensing to acquire information about the gradient, if not known a priori. Second, we need to define the communication methods to achieve cooperation between agents.
Most swarm robotic studies assume a priori knowledge of the source direction relative to all or some of the agents (Çelikkanat & Şahin, 2010; Gökçe & Şahin, 2010; Mataric, 1992; Spears, Spears, Hamann, & Heil, 2004). Such an assumption is viable in case an agent can instantaneously sense the gradient using multiple sensors (Braitenberg, 1986; Grasso, Consi, Mountain, & Atema, 2000; Ishida, Wada, & Matsukura, 2012). However, the ability to sense the gradient instantaneously using multiple sensors is subject to the smoothness of the scalar field, available intensity variations over the body length of an agent and the noise levels of the sensor and the environment. The size-problem discussed for the case of a bacterium performing chemotaxis by Macnab and Koshland (1972) relates well with a miniature agent sensing a gradient in the real world. In case an agent cannot detect the gradient instantaneously or it is only equipped with one sensor, it resorts to temporal sampling to sense the gradient (Jin, 2013). Another similar technique is an agent undergoing motions based on persistent excitation to localize the source (Dandach, Fidan, Dasgupta, & Anderson, 2009). However, such an implementation requires a reliable position estimate of an agent along with an estimate for distance from the source based on the sensed intensity values. Acquiring a reliable position estimate in a GPS-denied environment, such as undersea, is a hard and expensive problem to solve (Stojanovic & Preisig, 2003). In most real world scenarios, instantaneous intensity values of the source are corrupted with high levels of ambient noise (Dahl, Miller, Cato, & Andrew, 2007). Especially in underwater environments, multipath constructive and destructive interference due to variability of the environment makes gradient sensing a hard problem to solve (Stojanovic & Preisig, 2003). It also makes multiple sensor based instantaneous gradient sensing almost impossible to achieve.
The problem of source localization can be solved cooperatively by having a mix of individualistic and social behaviors (Ioannou, Singh, & Couzin, 2015; Matarić, 1995; Shaukat, Chitre, & Ong, 2013). An individualistic behavior may be self-sufficient in localizing the source, i.e. an agent is capable of localizing the source on its own. For example, a biased random walk of a bacterium or a moth is an example of a self-sufficient behavior (Berg and Brown, 1972; Kennedy, 1983). However, in some cases, the individualistic behavior may not be self-sufficient, e.g. an agent changing its speed as a function of instantaneous intensity as proposed by (Berdahl, Torney, Ioannou, Faria, & Deneubourg, 2013) can only localize the source being in a team. In the latter case, source localization is achieved as an emergent property of agent interactions where social behaviors are fundamental to achieve the desired collective behavior.
Conventional social behavior models require explicit inter-agent communication (Shaukat & Chitre, 2015b). In this paper, we follow the definition of explicit and implicit communication as given by Balch and Arkin (1994). Explicit-communication is defined as a deliberate act of invoking the signal transmission, whereas with implicit communication there is no such deliberate attempt. For example, an agent sending out its position estimate in the form of a data packet to another agent is considered as an act of explicit-communication. Explicit inter-agent communication is especially hard to achieve in environments with considerable delays and limited bandwidth such as undersea (Stojanovic, 2003). Implicit communication can itself be classified into two types. The first one is stigmergy (Grassé, 1959) where the information is acquired through memory of the environment. Pheromone-trail deposition based collective behavior of ants and termites has been a major inspiration in designing stigmergic multi-agent systems (Beckers, Holland, & Deneubourg, 1994; Panait & Luke, 2004; Sugawara, Kazama, & Watanabe, 2004). The other implicit communication approach is based on the interaction of an agent with its neighbors without using environment’s memory, simply referred to as passive sensing (Shaukat & Chitre, 2015b). Actively leaving a pheromone-like trail or modifying the environment so that other agents can use cues from the environment memory may not be desirable or even possible in many real world environments.
The scope of this paper is to investigate the emergent properties of adaptive agent behaviors from which a robust and a scalable collective behavior for a source localization problem can be achieved. We consider a realistic underwater acoustic source localization problem where we require all the agents of a multi-agent system to travel from one point to another in a two dimensional space. The two dimensional assumption is practically valid for autonomous vehicles operating on water surface or underwater at a specific depth. Given the motivation of using temporal sampling for gradient sensing and a passive sensing model for agent cooperation, we propose an algorithm, i.e. a set of agent behaviors that requires only one passive sensor for gradient sensing and two passive sensors for inter-agent cooperation. As for the social behaviors, there are no known strategies except the ones discussed in the following section which can achieve collective behavior using a passive sensing model without exploiting environment memory. This paper improves the performance of the collective behaviors proposed in the previous studies by proposing an optimized adaptive group cohesion strategy. Simultaneous optimization of the agent behaviors as a function of team size, initialization distance and neighborhood size allows us to develop analytical models to estimate the underlying correlations. This sets this study apart from most of the behavior based studies that ignore the behavioral optimization completely or optimize only one parameter at a time with all the other parameters held constant. The performance of the algorithm is statistically tested in a simulated underwater environment in the presence of strong multipath interference due to environment variability, sensor noise and actuator noise. The robustness is further validated for sensitivities in initialization distance and loss of source signal. It is shown that the achieved collective behavior is robust and scalable and achieves source localization without any agent breakaways. The proposed algorithm is also compared against a similar source localization algorithm albeit with a self-sufficient individualistic behavior and a static group cohesion model.
2 Related work
The robotic implementations of a single sensor based gradient detection are generally inspired from the biased random walk of a bacterium, Escherichia coli, performing chemotaxis (Maes, Mataric, Meyer, Pollack, & Wilson, 1996; Maes, 1996; Russell, Bab-Hadiashar, Shepherd, & Wallace, 2003). The bacterium has multiple chemoreceptors over its body, but insignificant differences between concentration levels over its body length keeps it from instantaneous gradient sensing (Macnab & Koshland, 1972). Hence, it resorts to temporal sampling to sense the gradient (Jin, 2013; Porter, Wadhams, & Armitage, 2011). The bacterium swims in a straight path interrupted by abrupt random turns known as tumbles. Increasing concentrations result in decreased frequency of abrupt turns and decreasing concentrations result in increased frequency, i.e. if a bacterium detects increasing concentrations then it swims relatively straight and takes random turns otherwise. However, some studies assume a constant tumbling frequency where the tumbling angle is a function of the chemical gradient. It is claimed by Shklarsh, Ariel, Schneidman, and Ben-Jacob (2011) that both approaches produce the same effect statistically. A similar constant frequency approach was used by (Shaukat, 2015, p. 37) for localizing an underwater acoustic source and an evolutionary algorithm was used to optimize the tumbling behavior. An agent kept its heading in case it was traveling in the direction of a positive gradient, however, took a normally-distributed random turn with some mean and variance otherwise. Interestingly, the optimization data for cooperative teams showed that a deterministic turn (optimal values of variance being zero) is more beneficial. In such a case, randomness in the walk is only a result of a noisy gradient or sensing noise. Note that all these bacterium-inspired individualistic behaviors are self-sufficient in localizing the source, i.e. the individualistic behavior can localize the source on its own without being aided by any other individualistic or social behavior(s).
As far as the cooperative multi-agent source localization approaches are concerned, they are either scaled versions of the individualistic behavior (Li, Meng, Bai, Li, & Popescu, 2008) or require explicit inter-agent communication for social behaviors (Marjovi, Nunes, Sousa, Faria, & Marques, 2010) to achieve cooperation. This is also true for the single-sensor based temporal sampling implementations which either require centralized (Ogren, Fiorelli, & Leonard, 2004) or decentralized explicit inter-agent communication (Bachmayer & Leonard, 2002; Shaukat et al., 2013). Strategies that use implicit communication for social behaviors are inspired from ants’ pheromone sensing and hence use stigmergy (Deveza, Thiel, Russell, & Mackay-Sim, 1994; Panait & Luke, 2004; Russell, 1999; Sugawara et al., 2004).
Implementation of social behaviors using strictly passive sensing, i.e. implicit communication without using stigmergy, is rare in the robotics literature. Even the strategies that assume passive sensing for one social behavior assume explicit communication for other social behaviors and hence can be categorized as hybrid strategies (Kuniyoshi et al., 1994; Mataric, 1992).
Recently, we proposed a distributed source localization algorithm (Shaukat & Chitre, 2015b) that assumes a static temporal sampling approach for gradient sensing, passive sensing based social behaviors and a self-sufficient individualistic behavior based on a bacterium-inspired random walk. All the agent behaviors were optimized using a genetic algorithm (GA) (Man, Tang, & Kwong, 1999). It was shown that the proposed strategy works at par with the explicit inter-agent communication based counterparts. In a similar study, an adaptive temporal sampling strategy was proposed where sampling time is a function of the sensed intensity values (Shaukat & Chitre, 2015a). The adaptive temporal sampling strategy improved the performance of the earlier localization algorithm. However, both these studies assumed a static group cohesion model.
In this paper, the proposed source localization algorithm is called adaptive cohesion based localization algorithm (ACLA). The concept of adaptive cohesion presented in ACLA is related to the earlier work of Shklarsh et al. (2011). However, Shklarsh et al. (2011) used a bacterium-inspired self-sufficient individualistic behavior where the parameters of the normally-distributed random walk, i.e. a zero mean and a variance of
3 Problem statement
We assume a team of homogeneous, miniature and simple robots such as shown in Figure 1(a), called Swarmbots. Each agent is equipped with one sensor to sense the signal of the source and hence conducts temporal sampling to sense the gradient. For the social behaviors, an agent cannot explicitly communicate with other agents. However, it can detect the number of neighbors and the neighbor majority in either its left or right half within some local neighborhood using two passive sensors.
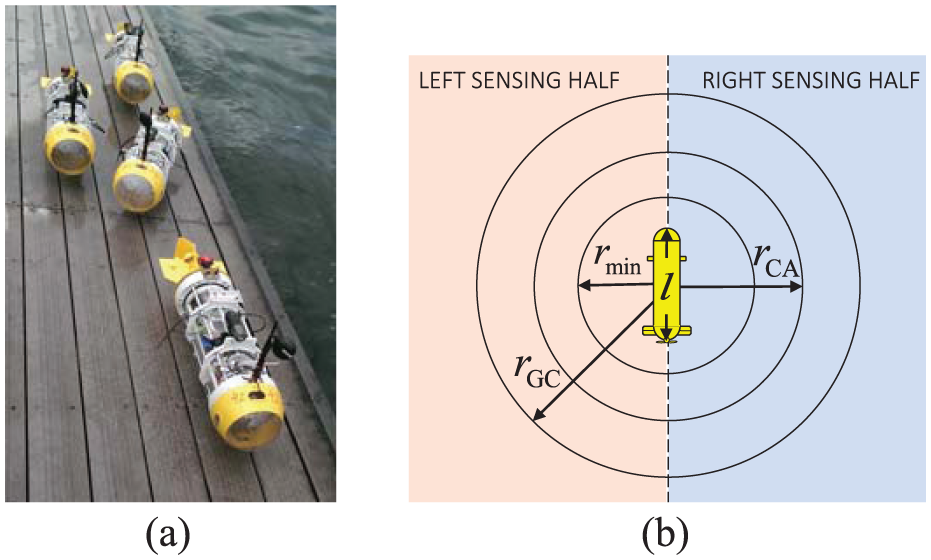
(a) A small team of four Swarmbots at Pandan Reservoir. (b) Passive sensing based interaction zones for CA and GC.
We assume a source localization scenario in which we want to send a team of agents to a target location over a long distance to carry out some desired task. This assumption is especially relevant for applications where we want to access targets of interest in areas hit by nuclear radiation or hazardous chemicals. The team needs to travel in an unconstrained search space and arrive at the source location with minimal number of agent breakaways. In global positioning system (GPS) denied environments where the robots do not have a sense of their own position or of the source location, this becomes a challenging task. One possibility is sensing the gradient of interest to localize the highest concentration areas or contours. Another possibility is to have a single point-source such as a radio frequency (RF) beacon (on land) or an underwater locator beacon (ULB) (in sea) installed at the target of interest, the signal strength of which can help the robots to localize the target. We can also flip the notion. Once the team has completed the given task, we can start the post-mission retrieval using the same method where another beacon can help the agents localize the home position.
In this paper, we consider an underwater source localization scenario where the source is a ULB. The gradient is corrupted with strong constructive and destructive multipath interference due to environment variability and agent’s sensor noise.
We define arrival time as the time taken by the last agent in a team to enter a success zone of radius,
4 Adaptive cohesion based localization algorithm
In this section, we first define the three constituent behaviors of ACLA, i.e. group cohesion, collision avoidance and adaptive cohesion. Each behavior only desires a certain heading for an agent while all the agents are assumed to maintain a constant speed throughout their mission. Inspired by Couzin, Krause, James, Ruxton, and Franks (2002), we use unit heading vectors to define each of the behaviors. For example, the instantaneous unit heading vector of the nth agent is
4.1 Group cohesion
An agent can detect whether the majority of its neighbors are in its left or right half, using two sensors, within some local neighborhood of radius,
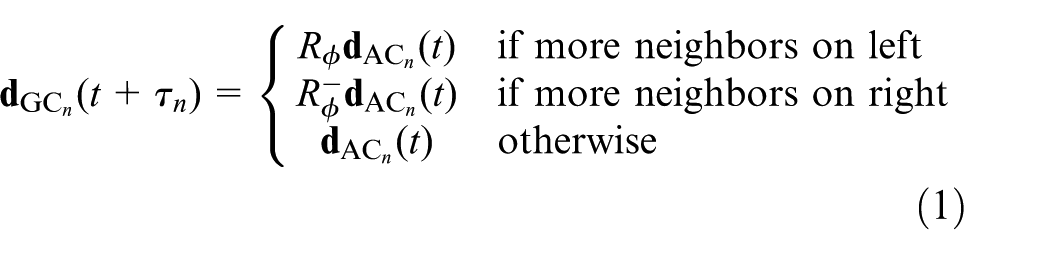
where
4.2 Collision avoidance
CA operates at the highest priority. CA has a relatively much smaller sampling time,
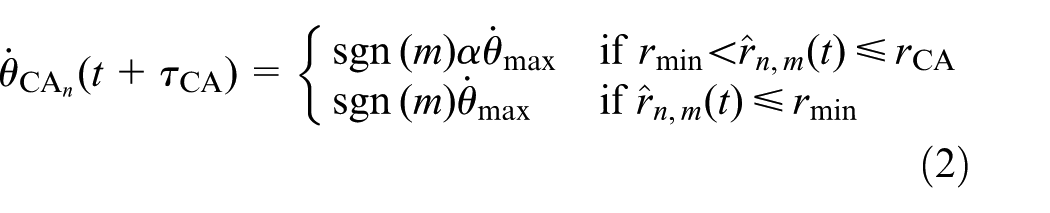
where

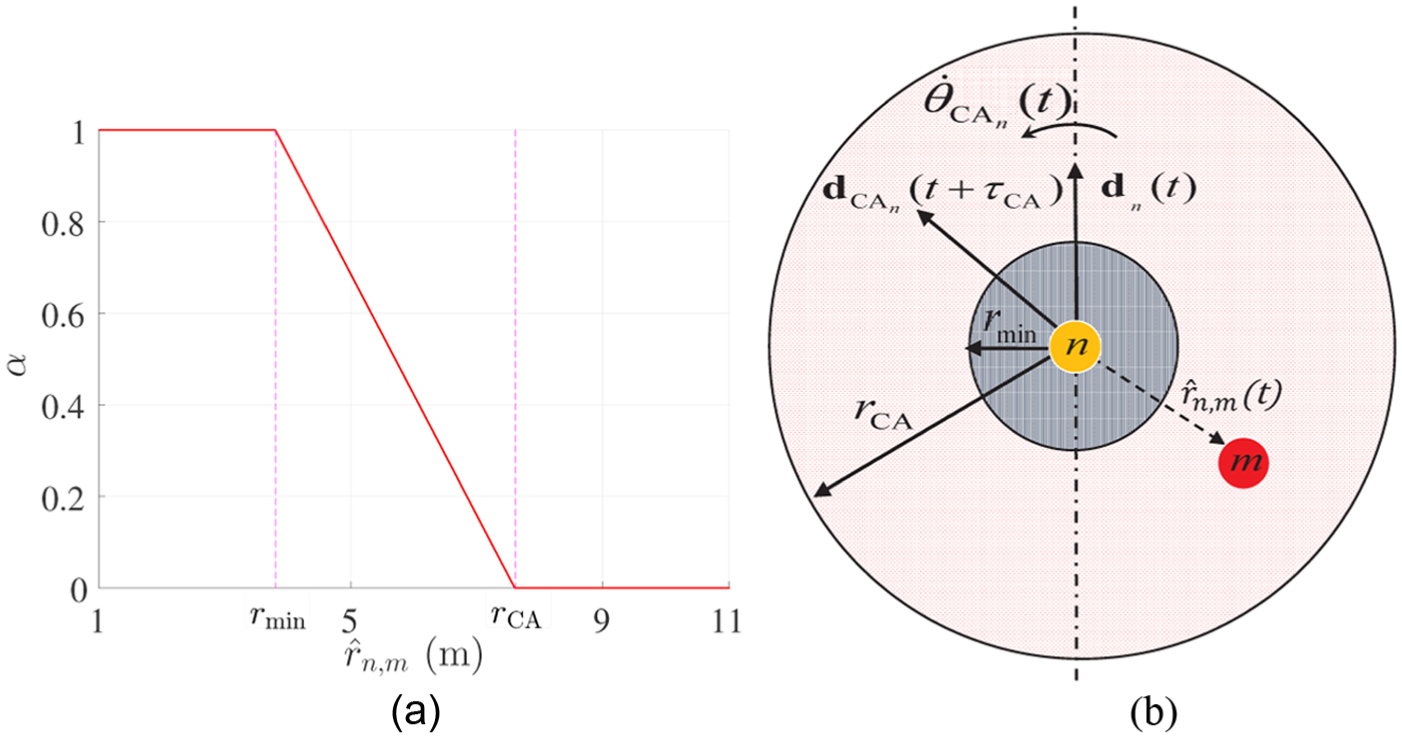
(a) Gain,
where
4.3 Adaptive cohesion
AC varies an agent’s group cohesion based on the sensed source-intensity values. The unit direction vector dictated by AC is a weighted average of the GC and the individualistic behavior as shown in Figure 3(a) and is given as


such that the source bias coefficient,
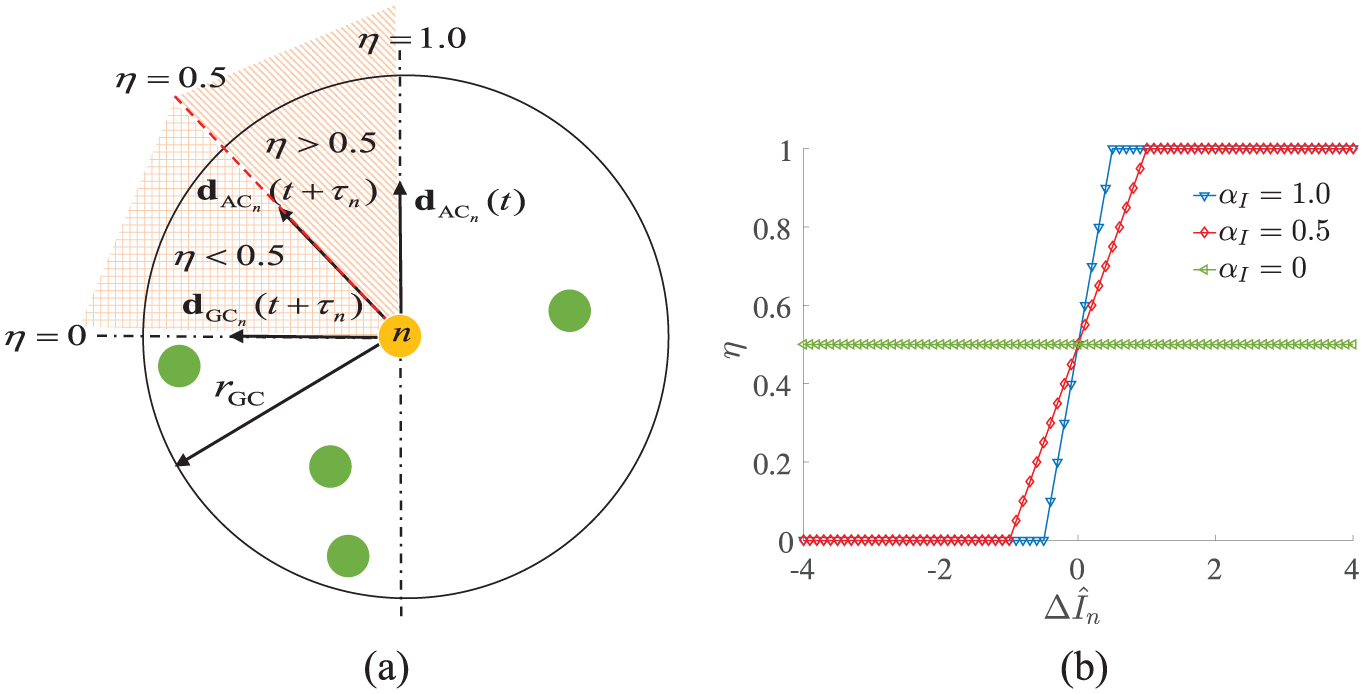
(a) The unit direction vector,
4.4 ACLA: Resultant behavior
Let us write the desired direction of the nth agent, commanded by ACLA as

where ACLA follows the CA behavior in case an agent detects neighbor(s) in its repulsion zone, otherwise ACLA follows the adaptive cohesion behavior.
4.5 Adaptive temporal sampling
An adaptive temporal sampling approach is a better alternative to a static temporal sampling approach for the source localization problem considered in this paper as shown by Shaukat and Chitre (2015a). The adaptive temporal sampling is composed of two behaviors. Principal behavior is IbA, i.e. the sampling time varies as a function of sensed intensity values. Intuition behind using IbA is based on the relationship between the initialization distance and size of the success zone. The radius of the success zone,

where
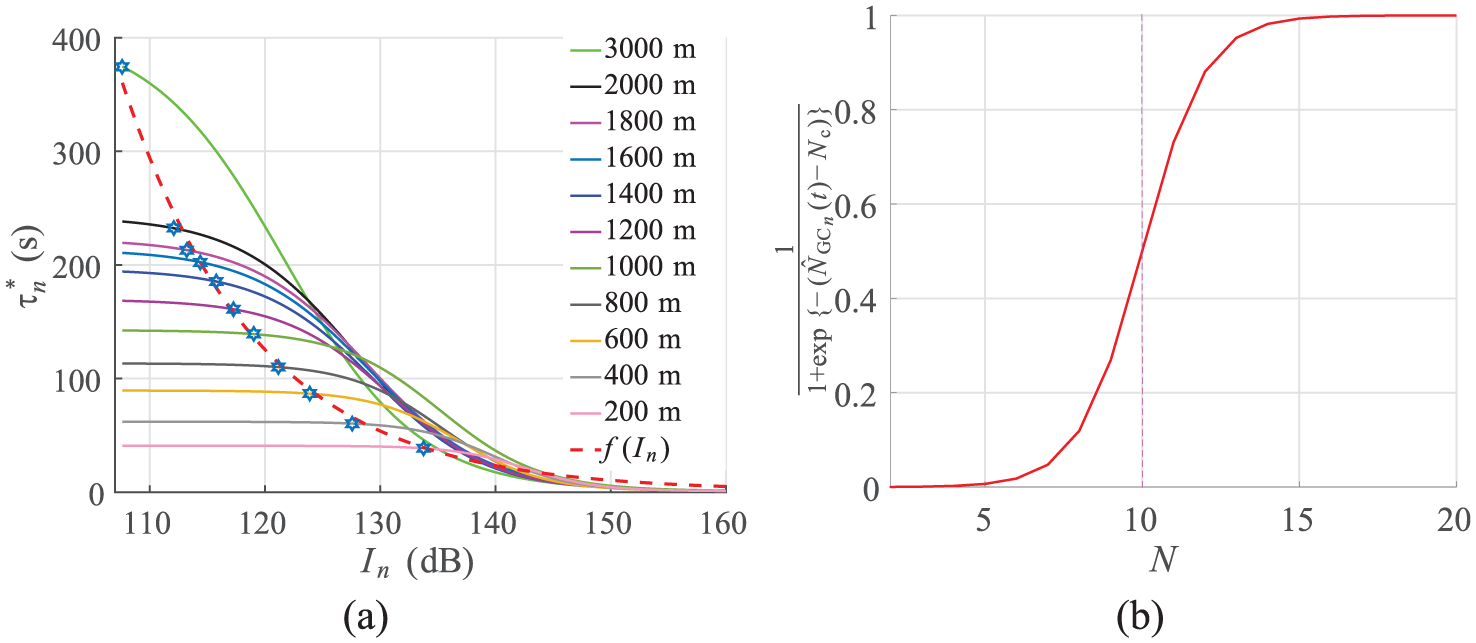
(a) Plotting the optimized adaptive sampling times shown as
The sampling time calculated by IbA in equation (7) is further regulated by CbA as

where
Effectively, CbA decreases the originally calculated sampling time by IbA in case an agent’s number of neighbors fall around the critical number of agents,
4.6 Practical relevance
From the earlier discussion, it is clear that gradient sensing and neighbors’ majority detection may require two separate sensing mechanisms. For example, a team of agents localizing a chemical source would require one chemical sensor per agent. For cooperation between agents, i.e. sensing the majority of neighbors, an agent may use two acoustic sensors to sense the noise made by other agents.
In this subsection, we look at some examples of using the two sensors for neighbor detection from the perspective of practical implementation. One of the possibilities is using two microphones or hydrophones per agent where an agent can listen for the presence of its neighbors. Generally, the drive or propulsion systems of unmanned ground vehicles (UGVs), unmanned aerial vehicles (UAVs) and autonomous underwater vehicles (AUVs) make significant noise which can be detected within some local neighborhood. We can use the time-of-arrival analysis on the sensors’ data which can help an agent estimate the number of neighbors in its neighborhood as well as detect whether the majority of its neighbors is located in its right or left half. In harsh environments, such as undersea environments where communication bandwidth is severely limited, low frequency sound signals like the thruster noise can travel several hundreds of meters (Calderon, 1964; Dahl et al., 2007; Urick, 1987). A typical AUV has a thruster noise in the range of 120 dB to 160 dB re 1
Acquiring information of the number of neighbors and neighbor majority completely defines CbA and GC respectively. However, CA requires the range of information from the nearest neighbor. Let us think about any other agent within the local neighborhood as an additional source. Given an agent has some prior knowledge of the source (neighbor in this case) intensity and its propagation model, it can obtain a good estimate of the range in a close proximity. This is especially true for sources which follow the inverse square law, i.e. the intensity is inversely proportional to the distance squared. Since the repulsion radius is generally small, the assumption pertaining to the knowledge of the estimated nearest neighbor distance is practically valid.
5 Experimental setup
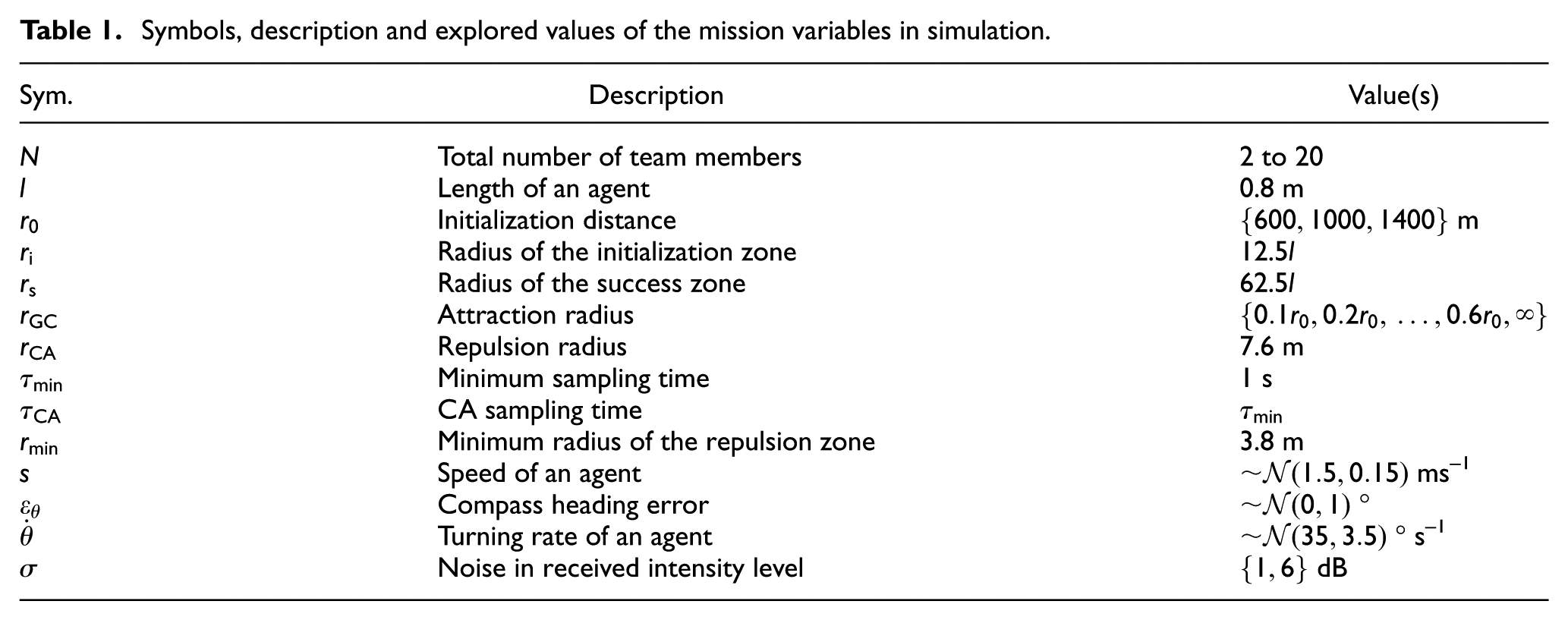
A team of N homogeneous agents is considered. Simulated model of an agent follows the kinematics of Swarmbot where each agent is assumed to be of length, l, has its turning rate,
The attraction radius,
Each of N agents is assumed to be deployed with a random pose in a circular area of radius,
All the values for the variables with their description have been listed in Table 1.
Symbols, description and explored values of the mission variables in simulation.
5.1 Sound propagation
The acoustic source is assumed to be a Dukane DK-180 ULB with a frequency of 8.8 ± 1.0 kHz and an effective bandwidth of 100 Hz. The source sound-level, SL, is set to 180 dB re 1
We adopt a simple incoherent model for sound propagation taking into account the transmission losses due to spherical spreading and absorption in seawater (Thorp, 1967). Spatial profiles of received source-intensity, I, are shown in Figure 5. Intensity levels have been corrupted with additive Gaussian noise of zero mean and equivalent dB-scale standard deviation of
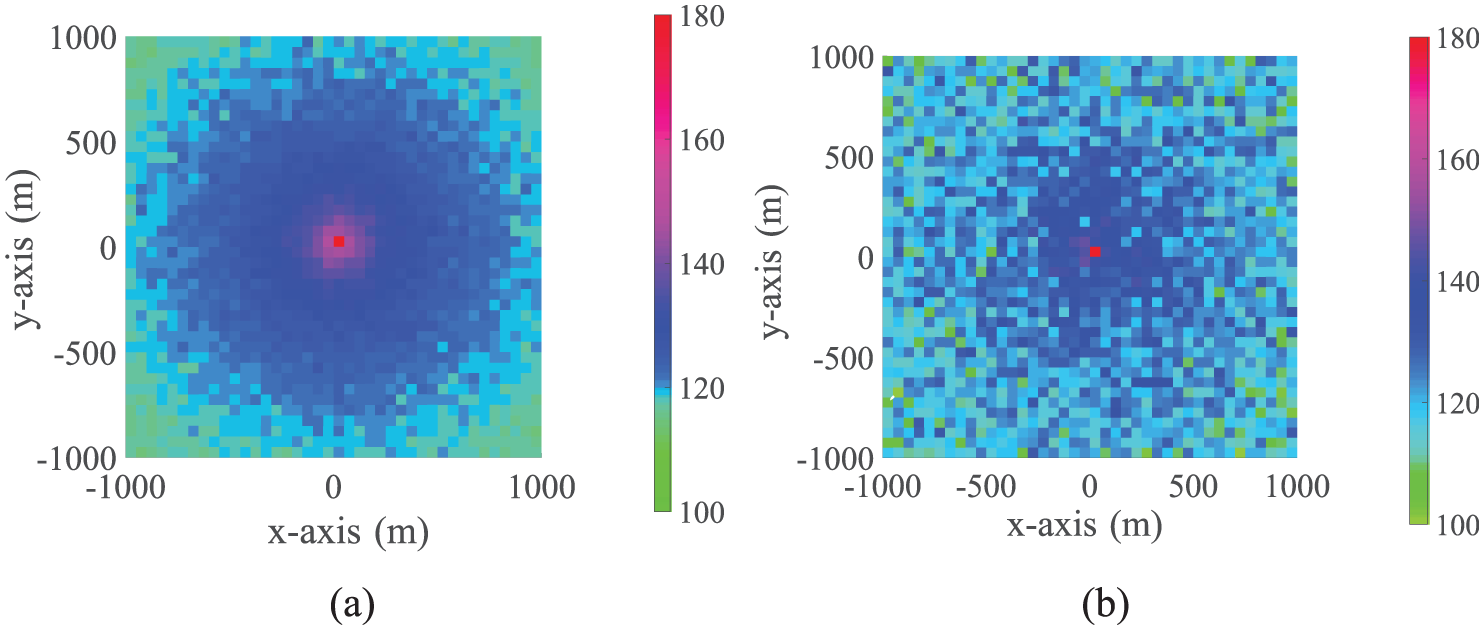
A two dimensional realization of source-intensity spatial profile for: (a)
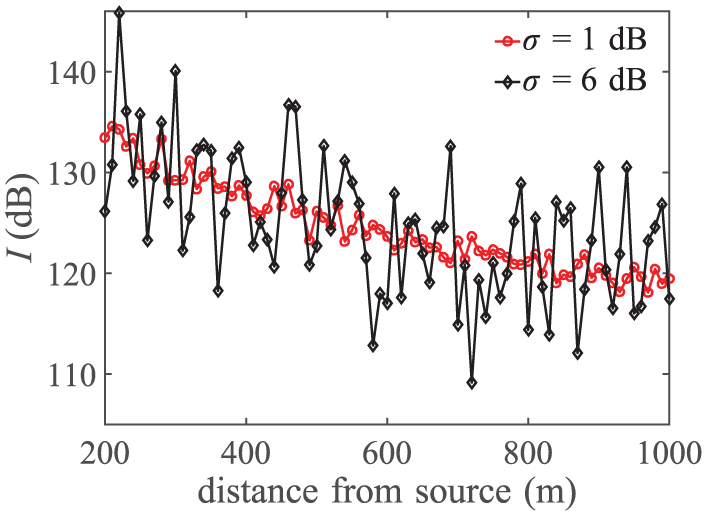
A realization of the noise-corrupted spatial intensity levels.
5.2 Evolutionary optimization
The parameters of the agent behaviors are optimized using a genetic algorithm (GA) (Man et al., 1999). According to the classification given by (Brambilla et al., 2013), agent behaviors can be designed by either behavior based design or automatic design. Behavior based design involves manually developing the individual behaviors of the agents which result in a desired collective behavior. It is generally a trial and error procedure where iterative tuning of the individual behaviors is carried out until the desired collective behavior is achieved. On the other hand, automatic design for multi-robot systems is mainly based on the evolutionary robotics approach. In the evolutionary robotics approach, initially a population of individual behaviors is generated at random. In each iteration, a certain number of experiments or simulations for each individual behavior are conducted. In each iteration, a fitness function is used to evaluate the collective behavior resulting from the individual behavior. Individual behaviors with a good fitness value are modified by genetic operators and then used for the subsequent iterations. Once no improvement is seen in the fitness value of the best individual behavior for a specific number of iterations, the evolutionary process is ended.
In this paper, we have a fixed general structure of the individualistic and social behaviors. However, the optimal values of the coefficients of the adaptive temporal sampling function and adaptive group cohesion are found through GA. The process is identical to that of the evolutionary robotics approach where each behavior in a population would be a different set of values of the sampling time and the turns probability distribution parameters. Our approach differs from a purely evolutionary robotics approach since the search space has been constrained by an already fixed behavioral structure. Hence our approach can be seen as a hybrid of behavior based design and automatic design. However, note that GA itself is not critical in the design process since any optimization strategy that is suitable for a high-dimensional, non-separable and non-linear problem without any guarantees of convexity can be used to find the optimal parameter values.
The GA’s fitness function is the mean arrival time (defined in Section 3) over 1024 simulated source localization missions. The number of simulated missions have been calculated using the Vargha Delaney’s A-measurement test (Vargha & Delaney, 2000) to ensure similar distributions for the entire GA population.
5.3 Robustness analysis
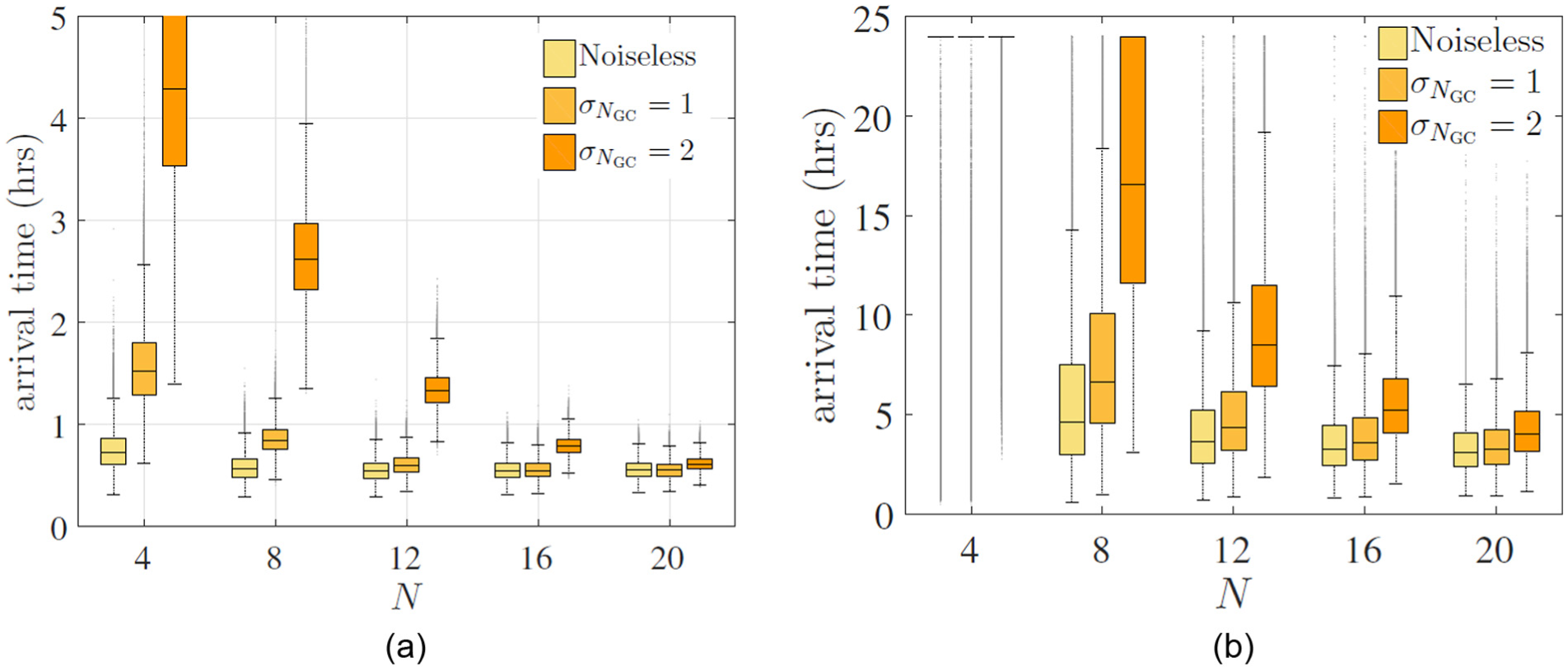
We optimize the behaviors for an ambient noise level of 1 dB, followed by estimation of the optimized behaviors with an analytical model. The collective behaviors based on these analytical models are then validated against an ambient noise of 1 dB and 6 dB. The validation is mainly based on the statistical analysis of the arrival time distributions via box-plots where each plot represents 5×104 simulated experiments, a band represents the median of a distribution, a box delineating the 25th to the 75th percentile, the whiskers show the lowest datum still within 1.5 inter quartile range (IQR) of the lower quartile, and the highest datum still within 1.5 IQR of the upper quartile. Wherever comparisons between different localization algorithms have been made, significance of comparative medians has been tested using the Mann-Whitney-Wilcoxon test.
In some instances, analysis of a particular simulated experiment is also undertaken to give a clearer understanding of both the collective behavior and the agent behavior. Such analysis is done through examining the team expanse and number of agent breakaways.
6 Optimization results
The optimization process for ACLA is composed of two phases. First we optimize the algorithm’s two key parameters for infinite attraction radius, i.e. adaptive cohesion coefficient,
Explored values of the parameters during the optimization process.
6.1 Optimization for infinite attraction radius
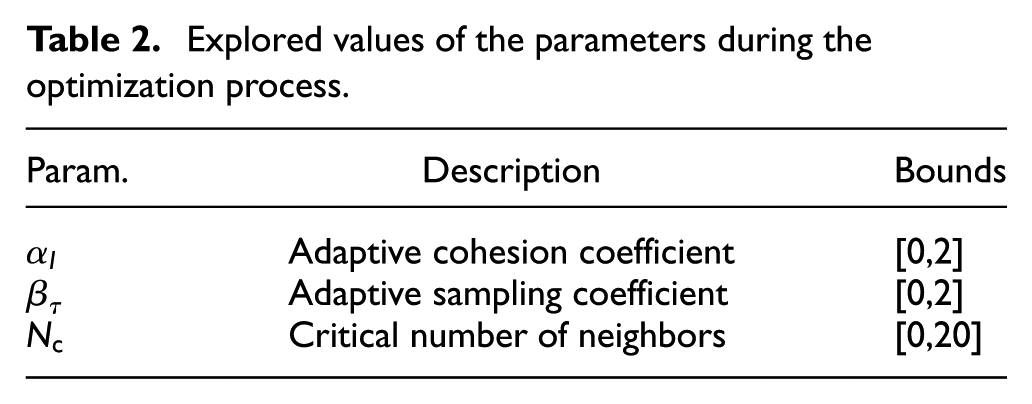
For the infinite attraction radius and varying initialization distances in the range of 600 m to 1400 m, the results for the optimized

Optimization results for infinite attraction radius and varying initialization distances and team sizes (a) Optimized
as shown in Figure 8(a) and the values of the parameters are given in Table 3.
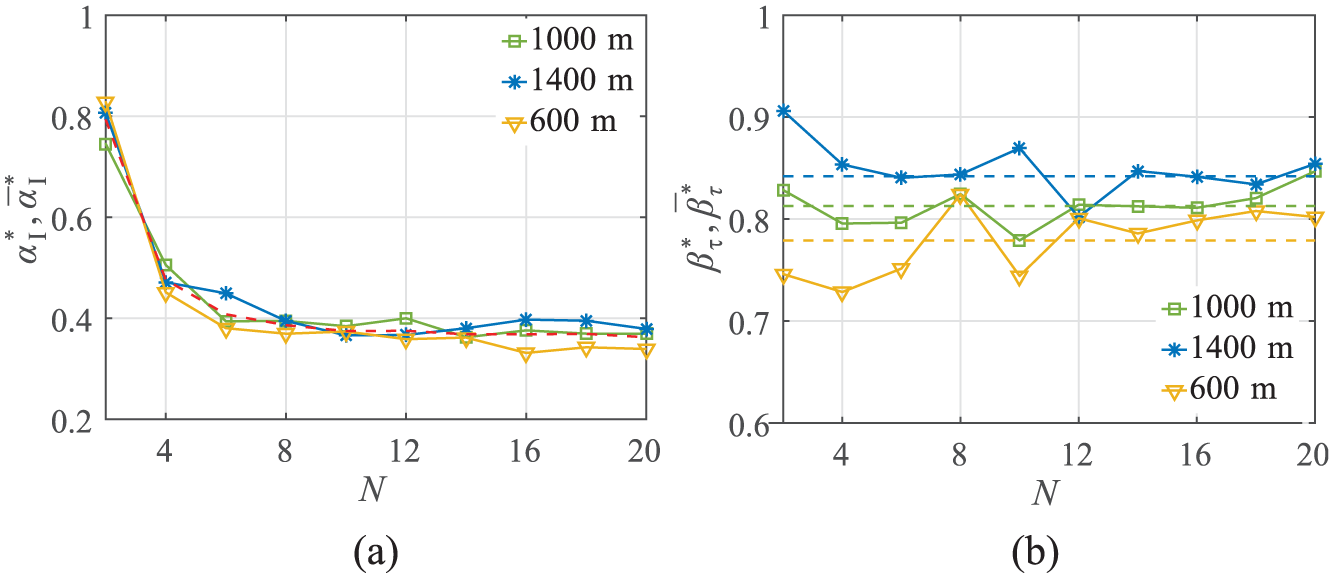
For infinite attraction radius, estimates for: (a)
Parameter and Root Mean Square Error (RMSE) values for respective equations.
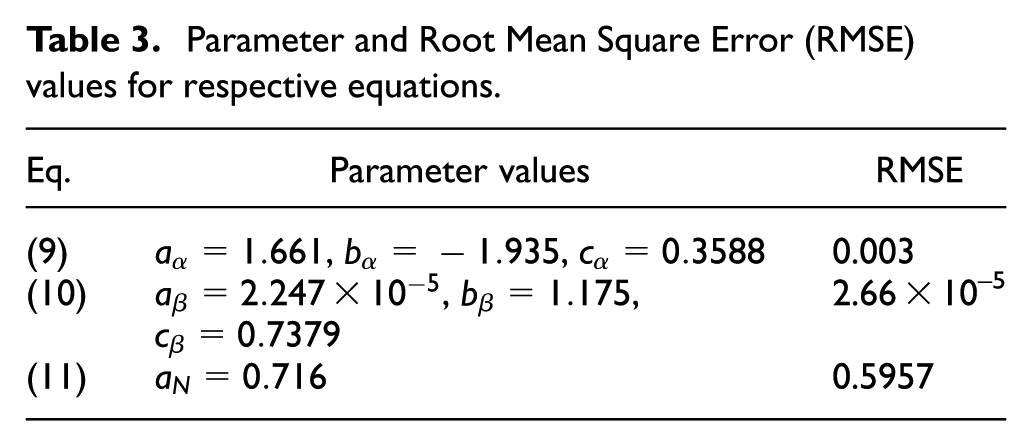
The values of

as shown in Figure 8(b) and the values of the parameters are given in Table 3.
6.2 Optimization for limited attraction radius
Now, let us optimize the critical number of agents,
The optimized critical number of agents as a function of team size is shown in Figure 9(a) along with the optimized mean arrival times in Figure 9(b) for limited attraction radii in the range of 10% to 60% of the initialization distance. It can be seen that for limited attraction radii, more than or equal to 30% of the attraction radius, the arrival performance is almost identical with the infinite attraction radius for team sizes of
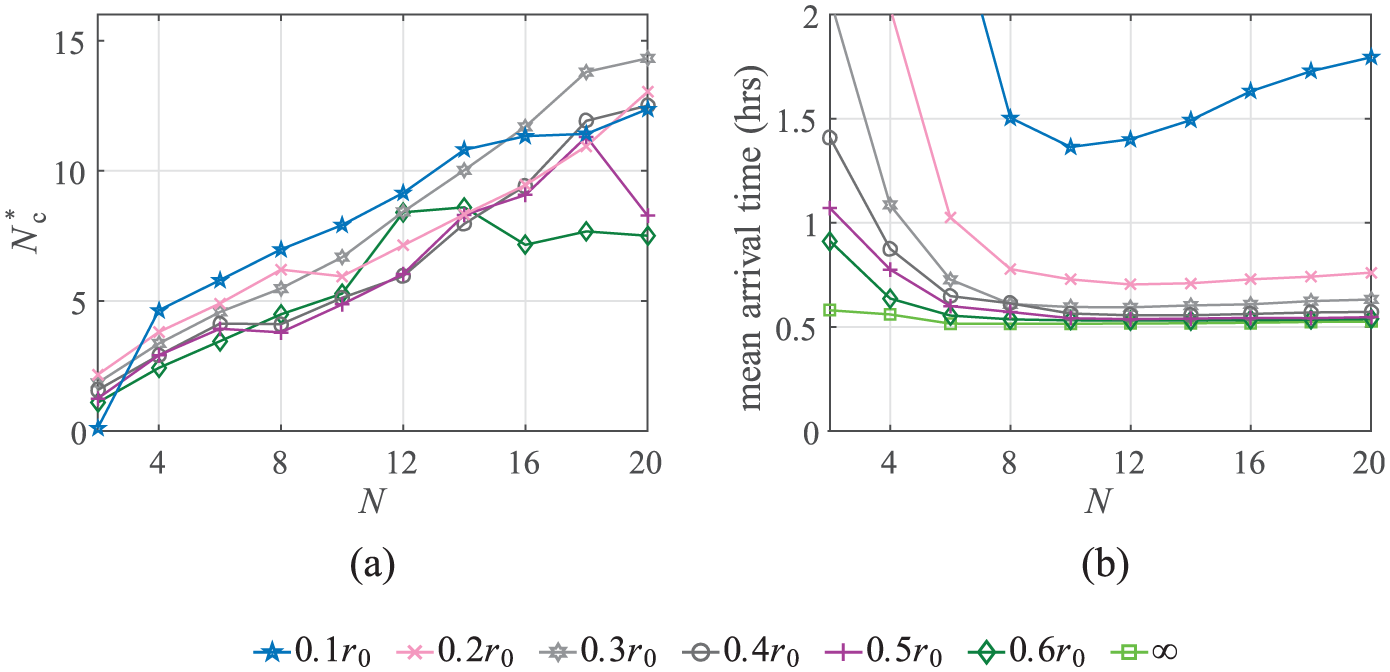
Optimization for limited attraction radius (see legend at the bottom): (a) Optimized critical number of agents, (b) mean arrival times.
As far as the optimization data for the critical number of agents is concerned in Figure 9(a), it increases almost linearly in N for team sizes less than or equal to 16 agents for all the attraction radii. However, as the attraction radii increase, e.g.
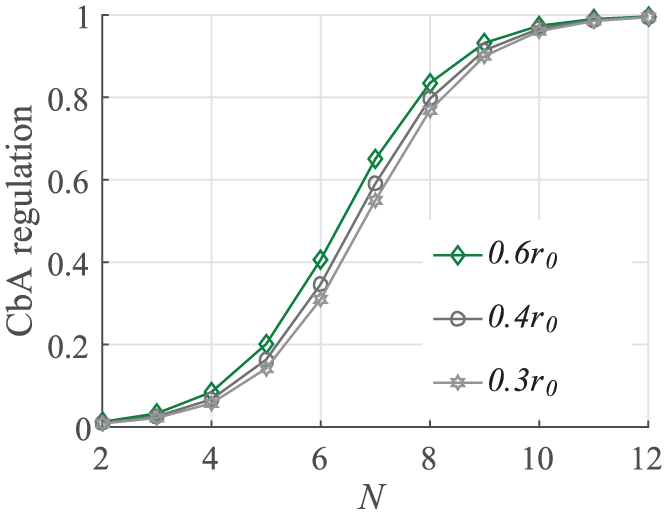
Optimized CbA regulation for a team size of 10 agents and various limited attraction radii in the range of
The estimate for the optimized critical number of neighbors can be written simply as a linear function in N as follows

and is shown as a solid line in Figure 11(a) and the value of the parameter is given in Table 3. The associated mean arrival times have been shown in Figure 11(b) where we can see that the choice of
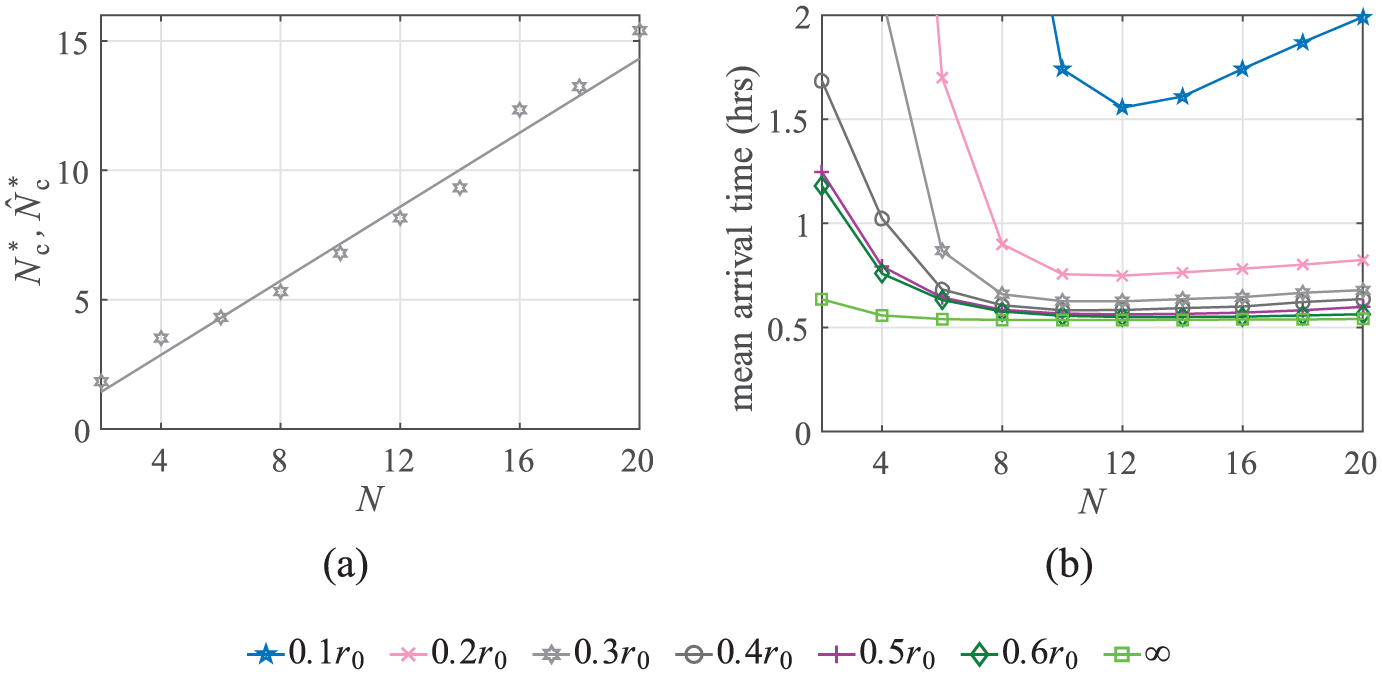
(a) Estimate for critical number of agents in limited attraction radii where the solid line is the estimate for the data points. (b) Mean arrival times for the estimated model (see legend at the bottom for different attraction radii in the range of
7 Robustness analysis
In this section, the robustness of the resulting collective behavior from the estimated models of the optimized ACLA is validated against noise levels of
The arrival time performance is either shown by using box-plots following the details given in Section 5.3 or by analyzing the team expanse of a single localization mission. Team expanse, e, is defined as the average distance of all the agents from the team’s centroid, i.e.

where
7.1 Multipath interference
The box-plots for ACLA’s arrival time performance are shown in Figure 12(a) and Figure 12(b) for noise levels of 1 dB and 6 dB respectively. It can be seen that for both the plots, the variance as well as the median of the arrival time distributions improves as N is increased. Also the difference between the arrival time distribution of infinite attraction radius and
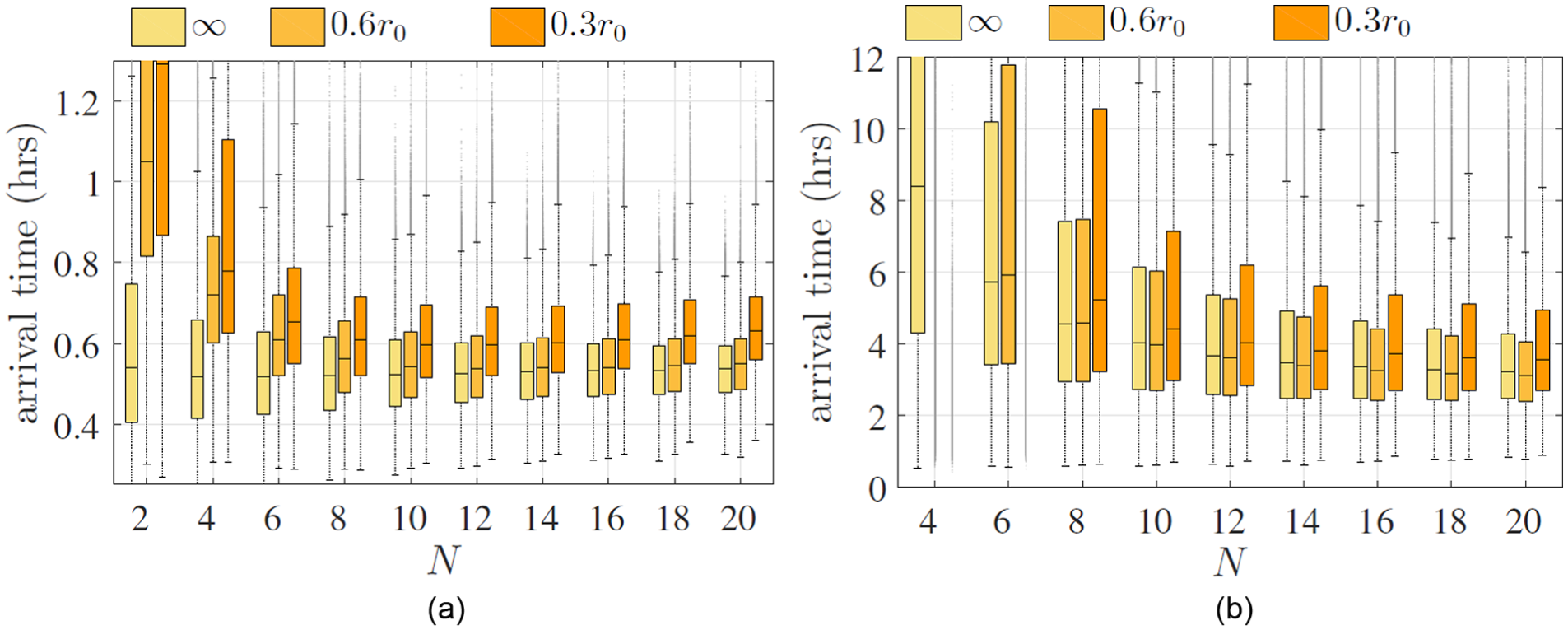
Arrival time performance for varying attraction radii (see legend) and varying levels of ambient noise for the analytical model estimated for the optimized ACLA: (a)
The number of failed missions in a total number of 5×104 missions is equivalent to the number of events in which one or more agent breakaways occurred. The plots for failure rate are given in Figure 13(a) for different attraction radii. It can be seen that for
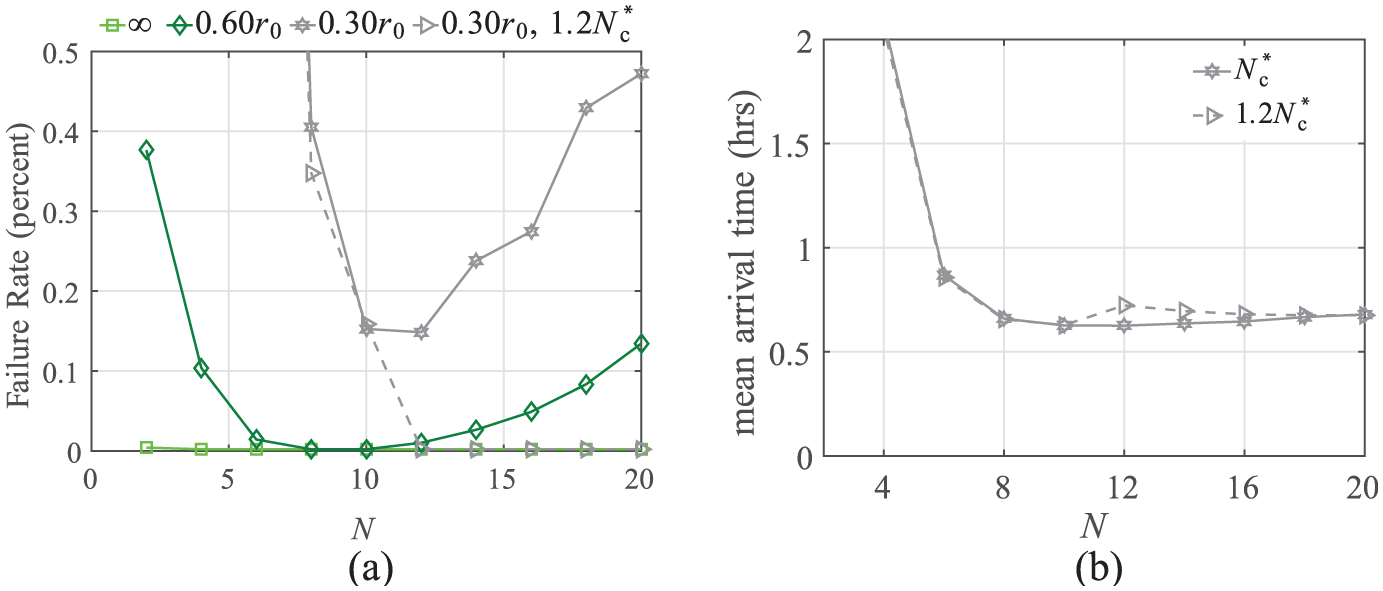
(a) Failure rate for varying attraction radii with optimal CbA and a more conservative CbA, i.e. 1.2 times the optimal
7.2 Initialization distance sensitivity
As far as the problem statement discussed in this paper is concerned, the initialization distance can be controlled within a tight uncertainty range. However, it is desired that the optimized solution for a specific distance scales well for a wide range of distances. We conduct sensitivity analysis for an optimized solution for
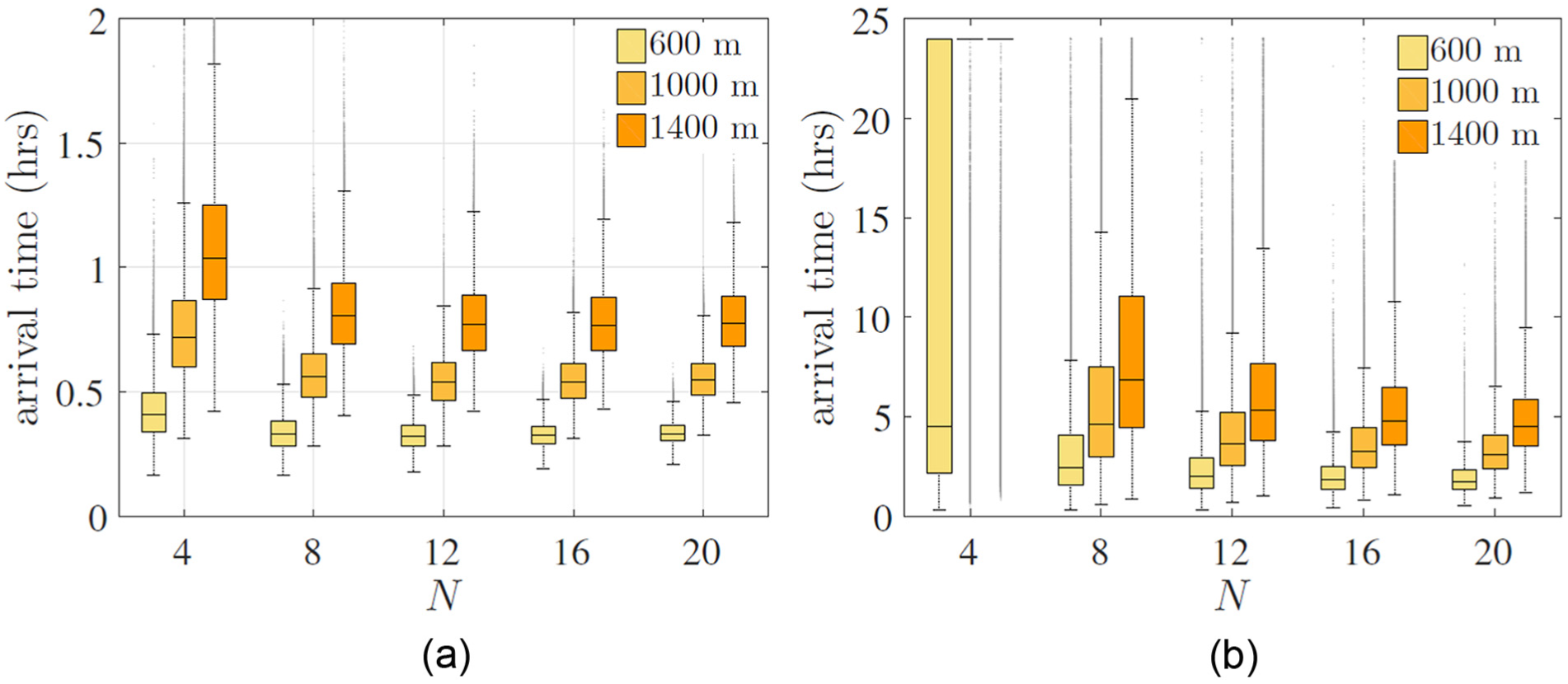
Initialization distance sensitivity analysis for optimized solution for
7.3 Loss of source signal
It is of interest to see how a cooperative team behaves in case the source signal disappears for some time. The primary concern in such a case is agents breaking away from the team. We conduct the analysis for a single localization mission for
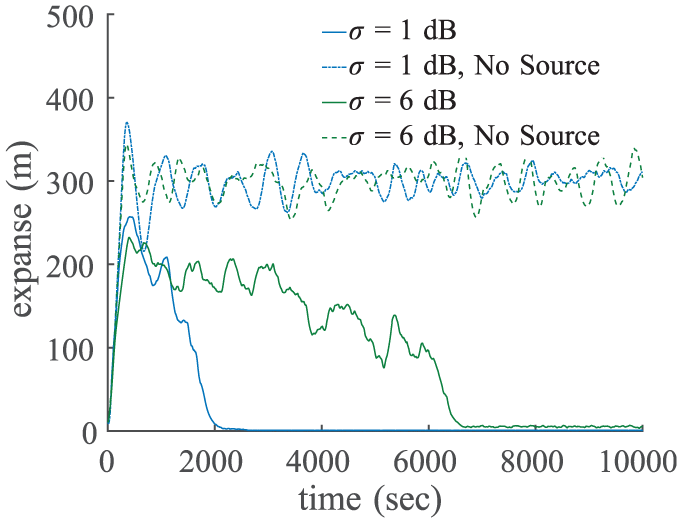
Comparative team expanse for source signal versus loss of source signal for
7.4 Neighbor detection noise
Since the proposed algorithm depends on the passive neighborhood sensing, we conduct comparative analysis for performance degradation in case of different noise levels. Since we have two sensors, one on the right and one on the left, we corrupt the number of neighbors estimation on both sides by an additive Gaussian noise with zero mean and variance,
The arrival time performance for
Neighbor detection noise analysis for optimized solution for
8 Comparative analysis
In this section, let us compare the performance of ACLA against our earlier work which builds on a self-sufficient individualistic model inspired by the biased random walk of a bacterium performing chemotaxis and a static group cohesion model (Shaukat, 2015, p. 38), referred to as bio-inspired control algorithm for small teams (Bio-CAST). The optimized Bio-CAST used here for comparison is based on the same adaptive temporal sampling strategy as ACLA. In Figure 17(a), the mean arrival times are shown for a noise level of 1 dB where ACLA is referred to as AC and Bio-CAST as BC in the legend. For both the cases of limited attraction radii, ACLA performs better than Bio-CAST for team sizes greater than 8 agents. However, if we increase the noise to 6 dB for the algorithms optimized for a noise level of 1 dB, we see that Bio-CAST is more robust to the ambient noise than ACLA. We can also see that ACLA is still in the process of improving its performance as N increases within the considered range of 1 to 20 agents while Bio-CAST is able to achieve its maximum performance at about a team size of 16 agents.
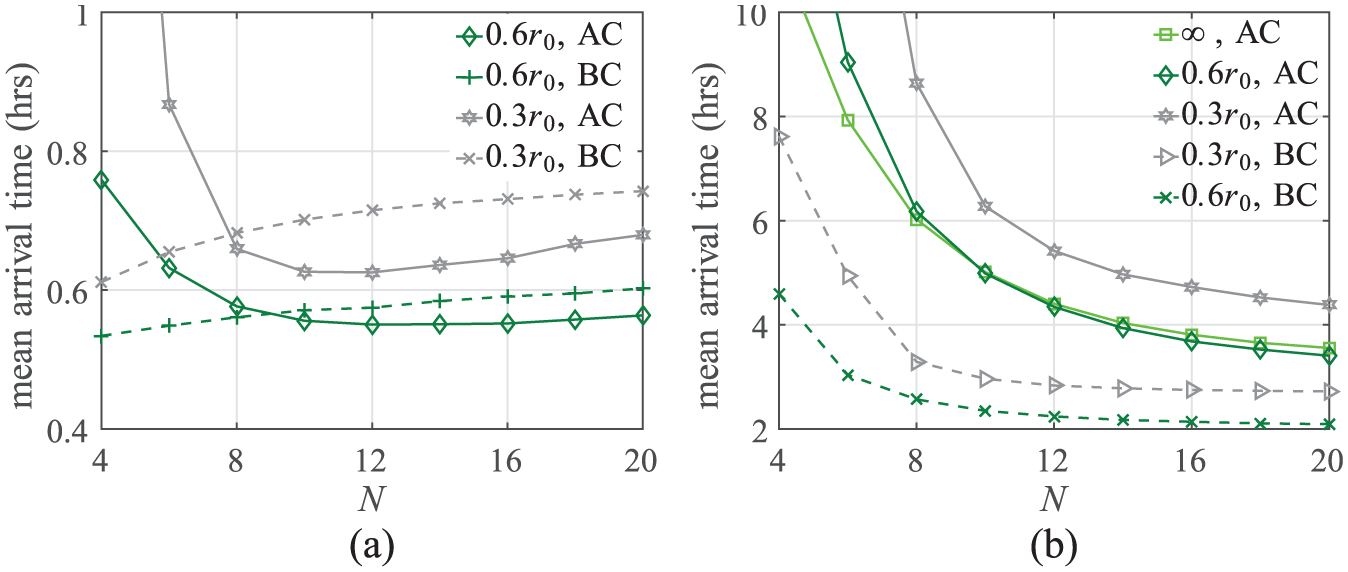
(a) Mean arrival time comparison for ACLA (AC in legend) versus Bio-CAST (BC in legend) for varying attraction radii and noise levels: (a)
The comparative analysis shows that fusing ACLA and Bio-CAST in a more generic optimization setup may result in a more robust and a better performing localization algorithm. The fusion would assume an adaptive biased random walk which is a function of sensed number of neighbors. As the number of neighbors decrease, an agent would assume a more bacterium-like response to the changing intensity levels whereas it may let go off the self-sufficient individualistic behavior completely when with a large number of neighbors. It will also be interesting to investigate how these behaviors evolve once optimized explicitly for a higher ambient noise scenario.
9 Conclusion
In this paper, a source localization algorithm based on adaptive group cohesion was presented. The proposed algorithm, called ACLA, achieves source localization as an emergent property through agent interactions. An agent does not have a self-sufficient individualistic behavior and hence is incapable of localizing the source on its own.
For optimizing the behaviors of ACLA, a two phase optimization strategy was introduced. In the first phase, IbA and the adaptive cohesion were optimized for infinite attraction radius and in the second phase CbA was optimized to minimize agent breakaways for limited attraction radii. It was shown that by only having an optimized CbA, the performance of finite attraction radii above a certain threshold can be made identical to the performance of an infinite attraction radius.
The optimized behaviors were then approximated with analytical models which were validated against sensor and actuator noise, strong multipath interference due to environment variability, sensitivities in initialization distance and loss of source signal. The statistical analysis of the arrival time distributions shows robustness of the collective behavior for all the considered scenarios. The localization failure rate was also studied which shows that by selecting a slightly more conservative CbA, a more robust collective behavior can be achieved with a zero failure rate.
ACLA was further compared against Bio-CAST, a source localization algorithm with a self-sufficient individualistic behavior. It was shown that for low ambient noise levels, ACLA performs significantly better than Bio-CAST. However, for strong multipath interference, Bio-CAST is more robust than ACLA and performs significantly better. A fusion of the two algorithms which would result in an adaptive turning behavior as a function of team size was also proposed as future work. The fusion approach may lead to a better performing and a more robust source localization algorithm.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.