
Abstract
Robotic mobile fulfillment (RMF) systems automate storage and transportation within fulfillment centers while still relying on human pickers. We focus on two key performance metrics in these systems, aiming to minimize overall completion time (OCT) as the primary objective and the number of required robots (NRR) as a secondary objective. We investigate two interrelated operational problems influencing these metrics: (i) Pod selection, which involves choosing the mobile racks for item picking, and (ii) pod scheduling, which entails assigning these racks to pickers and determining the picking sequence. We first explore the pod scheduling problem independently, providing theoretical results. This stand-alone problem is NP-hard with at least two pickers when minimizing OCT and remains NP-hard with even one picker when minimizing NRR. The NRR objective introduces a novel optimization problem structure, contributing to scheduling theory even beyond the RMF context. We demonstrate that a simple but effective scheduling rule is asymptotically optimal for minimizing OCT with multiple pickers. For NRR minimization with a single picker, we derive theoretical performance bounds for two sequencing rules. When incorporating the pod selection problem, we focus on two approaches: (i) Sequential and (ii) integrated pod selection and scheduling. The sequential approach handles pod selection first, then pod scheduling, while the integrated approach addresses both problems simultaneously within a single formulation to minimize OCT. Computational experiments using e-commerce order data reveal that the sequential approach achieves significantly faster and constant computation times, with a mean OCT similar to that of the integrated approach. We also find that our sequencing rules can reduce mean NRR by 13%–28% without affecting OCT, compared to the case where no such rules are used. The sequential approach for OCT minimization and the proposed sequencing rules for NRR minimization are scalable to large systems with any picker count. Our experiments also explore the changes in OCT and NRR values with varying numbers of pickers. These results guide managers in assigning the desired number of pickers for a target OCT and inform managers about the average NRR they can expect for the chosen picker count.
Introduction
As competition in e-commerce intensifies, firms must constantly improve operations to meet the rising customer expectations for fast and error-free deliveries. Order fulfillment has an increasingly critical role in today’s competitive environment in this regard. A failure or delay in order fulfillment operations can lead to the loss of loyal customers and result in significant financial losses (Rao et al., 2011). Recognizing this reality, companies continuously seek innovative ways to improve fulfillment performance while reducing the associated costs. Robotics advancements draw significant attention from e-commerce companies and logistics experts alike, as the automation of key fulfillment processes, such as storing, transporting, picking, and packing, offers increased efficiency, accuracy, and scalability.
Among various implementations of warehouse automation, robotic mobile fulfillment (RMF) stands out as a noteworthy and increasingly popular application. RMF automates the storing and transporting processes in a fulfillment center while leaving the picking operations to human employees. A typical RMF system is a part-to-picker order-picking system consisting of three key components: (i) Pickers, (ii) mobile racks (pods), and (iii) robots. Pickers are human employees who remain in their workstations throughout their shifts to pick items from pods that are positioned in front of them by robots. Pods are multi-level racks with several compartments to store items of the same or different stock keeping units (SKUs). They are designed to be transported by robots without human intervention. Robots travel on the fulfillment center floor, and when a pod needs to be moved, they get under the pod, lift it off the ground, and move the pod to a programmed destination. A pod can be moved by any robot in the system; therefore, RMF systems typically require fewer robots than pods. Pods in an RMF system are parked in a pod storage area while not in use (Figure 1). RMF systems usually provide high picking accuracies, often exceeding 99%.
1
Layout of an example robotic mobile fulfillment (RMF) system, with pickers positioned on two sides.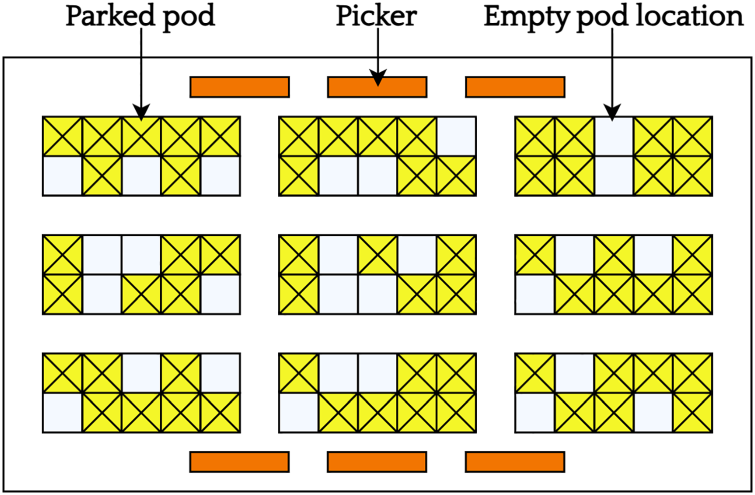
RMF is preferred in fulfillment centers where items in stock are relatively small in size (e.g., small electronics, apparel, cosmetics), and a high number of orders are continuously fulfilled (Allgor et al., 2023). These centers often have multiple independent or loosely connected RMF systems, such as Amazon’s five-story fulfillment center in Detroit (Reindl, 2023). This research focuses on one such RMF system and examines two critical operational problems: (i) Pod selection and (ii) pod scheduling.
As is common in practice, we consider an e-commerce company employing an order management system to retrieve orders from a backlog and allocate them to the focal RMF system. The focal system is stocked according to a given inventory allocation scheme, with a specific quantity of each SKU in each pod. A pod can contain items of different SKUs, and the inventory of an SKU can be distributed across several pods.
2
The company’s order management system releases batches of orders to the focal RMF system periodically. Once orders are released to the system, a picking interval is initiated, during which the system must complete the released orders without interruption. Given the orders at the beginning of each interval and the up-to-date inventory allocations, the RMF system must
select the pods to send to pickers and decide on pick quantities (pod selection problem) and schedule these pods with the pickers (pod scheduling problem).
The pod selection problem involves selecting the pods to process during a picking interval and determining the number of items of each SKU to pick from each selected pod to fulfill the orders assigned to the interval. Although items within a single customer order can be picked by different pickers at different times in the same interval and merged into complete orders in a separate workstation,
3
the task of selecting the pods is still not straightforward as the inventory of an SKU may be distributed across multiple pods in the system. After selecting the pods to process, the pod scheduling problem
assigns a picker to process a selected pod (pod-to-picker assignment component) and determines the order in which the picker processes the pods (pod sequencing component).
We consider planning horizons (or simply, horizons) consisting of multiple consecutive picking intervals and evaluate two metrics as key performance indicators. First, the overall completion time (OCT) metric refers to the finish time of a planning horizon, i.e., the time point at which all orders assigned to the intervals within the horizon are fulfilled. Because the orders to be fulfilled are exogenous and given by the order management system, minimizing OCT effectively maximizes the order throughput rate for the planning horizon. The second metric of interest is the number of required robots (NRR) to seamlessly support the picking operations of a planning horizon.
We first address the pod scheduling problem (Figure 2), initially treating the pod selection solutions as given. This enables an independent investigation of pod scheduling to derive theoretical results for both OCT and NRR minimization. Then, we incorporate the pod selection problem into our study, considering the same two metrics. To minimize OCT, we propose two approaches: (i) Sequential pod selection and scheduling (SPS) and (ii) integrated pod selection and scheduling (IPS). The sequential approach addresses pod selection first, followed by pod scheduling, while the integrated method tackles both problems simultaneously within a single formulation to minimize OCT. Finally, we focus on the pod sequencing component of the pod scheduling problem and re-sequence the interval schedules obtained in the previous step with the aim of minimizing NRR while preserving the pod-to-picker assignments obtained previously to maintain the lowest OCT (Figure 2).
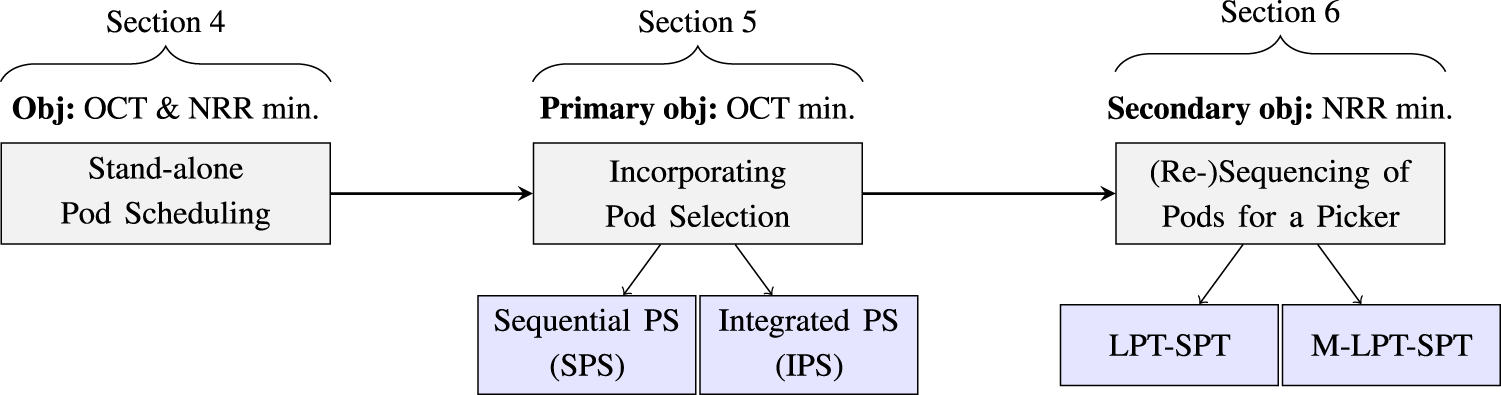
The study flow diagram.
Our theoretical contribution to the RMF literature can be summarized in three key points. First, to the best of our knowledge, ours is the first study to address both pod selection and pod scheduling problems in RMF with OCT and NRR minimization objectives. Our focus on these two objectives leads to two distinct problem structures for the stand-alone pod scheduling problem. Notably, the NRR minimization objective leads to a novel optimization problem structure, contributing to scheduling theory even beyond the RMF context. Second, we demonstrate that the stand-alone pod scheduling problem is NP-hard under both objectives. This problem is NP-hard with at least two pickers when minimizing OCT, and remains NP-hard with one picker when minimizing NRR. Third, we demonstrate that the longest processing time first (LPT) scheduling rule is asymptotically optimal for minimizing OCT with multiple pickers. For NRR minimization with a single picker, we derive theoretical performance bounds for the longest/shortest processing time first (LPT-SPT) sequencing rule. Additionally, we introduce a modified LPT-SPT sequencing rule (M-LPT-SPT), which performs better when a high proportion of pod processing times are short. This modified rule maintains the same theoretical performance bound as LPT-SPT. 4
Our computational experiments using e-commerce order data reveal several managerial insights, three of which we highlight here. First, SPS maintains a consistently low computation time when minimizing OCT, regardless of the number of pickers in the system, whereas IPS requires longer computation times as the number of pickers increases. SPS is up to 7 times faster than IPS, and the mean planning horizon OCT for SPS is within half a percent of IPS across all considered instances. This finding demonstrates that the sequential pod selection and scheduling approach is preferred over the integrated approach (IPS) in practice due to its efficient computation time and scalability, with only a negligible impact on mean OCT.
Second, given the best OCT level found by the SPS approach, we apply LPT-SPT and M-LPT-SPT sequencing rules to resequence the pods for each picker to minimize NRR without changing the pod-to-picker assignments (last step in Figure 2). When comparing the sequencing rules for NRR minimization, we find there is no apparent difference between the two rules if pod processing times are heavily left-skewed toward shorter durations. However, as processing times become more symmetric, LPT-SPT performs better for systems with longer pod processing times, while M-LPT-SPT is the better choice for systems with shorter pod processing times. We demonstrate that choosing the right rule reduces the number of required robots by 13% to 28%, without affecting OCT, compared to not using any of these sequencing rules.
Third, our computational study provides guidance for managers on the number of pickers needed in an RMF system to achieve a target mean OCT. While more pickers in the system can decrease OCT, it will inevitably increase NRR. We demonstrate that using one of our proposed sequencing rules can help RMF managers effectively address this trade-off. Our robustness and sensitivity analysis consisting of six extensions demonstrates that our managerial insights continue to hold under several changing system parameters and relaxed assumptions.
The remainder of the paper is organized as follows. Section 2 reviews the relevant literature, highlighting gaps addressed by our research. Section 3 introduces notation. Section 4 examines the pod scheduling problem independently to gain insights, while Section 5 incorporates the pod selection problem with an OCT minimization objective. Section 6 discusses the LPT-SPT and M-LPT-SPT sequencing rules for NRR minimization. Section 7 presents our computational study, and Section 8 concludes the paper. Proofs and additional details are provided in the electronic companion (EC), accessible online (doi: 10.1177/10591478251349902).
The complexity and variety of automated warehousing and fulfillment systems have only increased since their advent in the 1960s (De Koster, 2018), and today’s logistics landscape involves numerous types of such systems deployed by businesses worldwide. Automated systems might utilize different technologies as their main driving force, such as automated cranes, forklifts, or autonomous vehicles. RMF is a relatively novel concept compared to the long history of warehouse automation practices (Azadeh et al., 2019; da Costa Barros and Nascimento, 2021). First operationalized by Kiva Systems in the 2000s (Guizzo, 2008), RMF systems are especially suited for e-commerce fulfillment centers where a diverse assortment of relatively small-sized items are present, and high volumes of orders need to be fulfilled continuously (Rimélé et al., 2022). In this section, we focus on the RMF literature and refer the interested reader to Azadeh et al. (2019) for a review of other types of automated warehousing systems.
The managerial problems in the design, deployment, and operation of RMF systems can be classified into four main types. First, inbound inventory needs to be divided among the pods of the system, constituting the inventory allocation problem. The inventory allocation problem can consider different objectives, such as maximizing the throughput rate (Lamballais et al., 2020), maximizing similarities of SKUs in a pod (Kim et al., 2020; Xiang et al., 2018; Yuan et al., 2021), minimizing the number of pod visits to stations (Xiang et al., 2018), and minimizing the total distance traveled by robots (Cezik et al., 2022; Yuan et al., 2021). This problem is beyond the scope of our research, but we present our results under two inventory allocation policies to demonstrate robustness. Second, given customer orders (consisting of either a single item or multiple items), pods to pick the items from need to be decided, which refers to the pod selection problem. Third, selected pods must be scheduled with specific pickers of the system, leading to a pod scheduling problem. As part of pod scheduling, a pod must be assigned to a picker (pod assignment), and the pod processing order for a picker must be determined (pod sequencing). Lastly, a fourth problem concerns the locations of pods in the storage area under the objectives of total pod distance minimization (e.g., Weidinger et al., 2018), total robot distance minimization (e.g., Yuan et al., 2019), and throughput maximization (e.g., Lamballais et al., 2017; Roy et al., 2019). Our study focuses on the second and third problems, i.e., pod selection and pod scheduling.
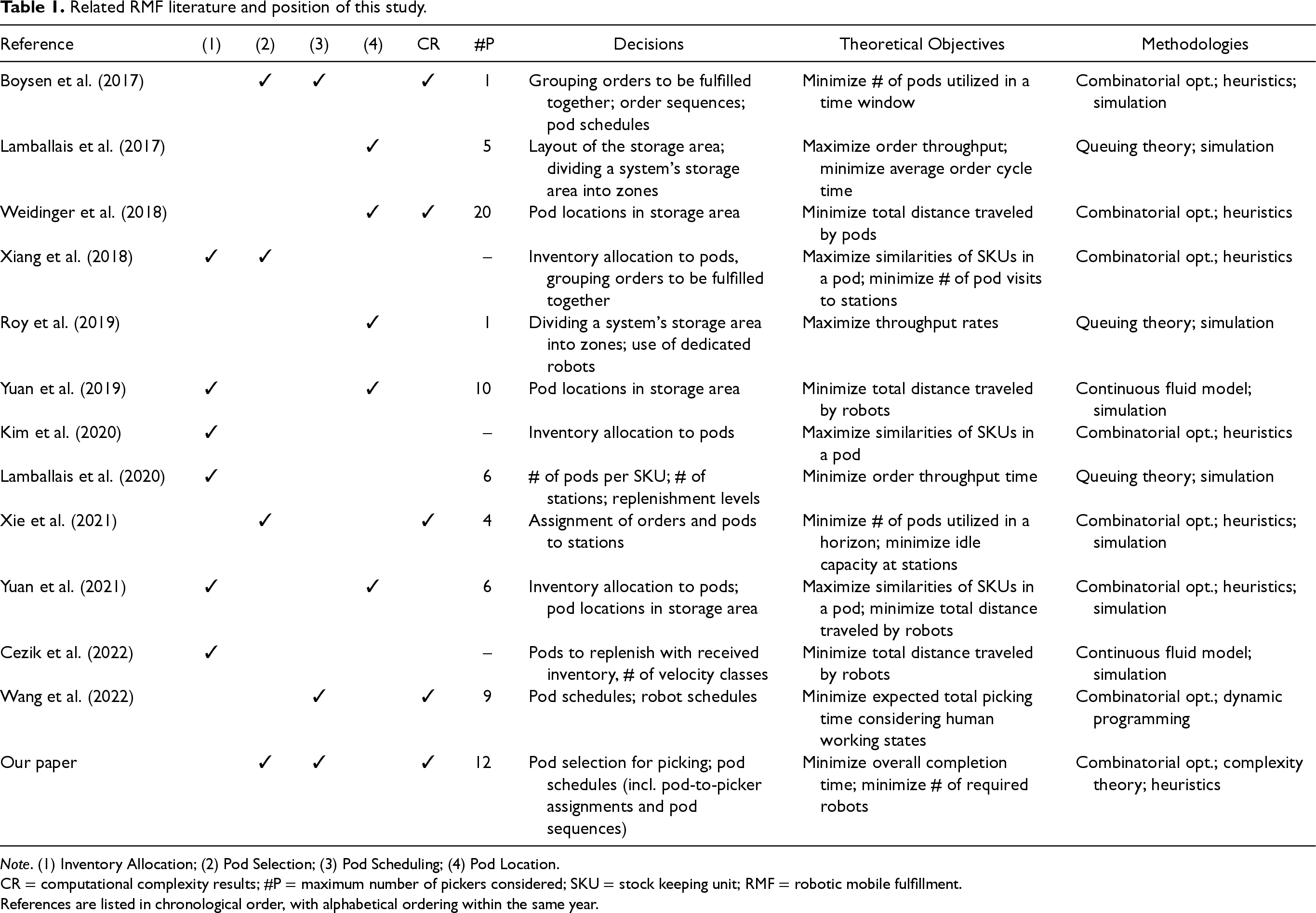
Table 1 summarizes selected studies from the RMF literature across multiple dimensions. To our knowledge, our paper is one of only two studies that consider both pod selection and pod scheduling problems in the same framework, the other being Boysen et al. (2017). In their case, they consider a single picker who can handle a limited number of customer orders simultaneously. In contrast, we focus on the case where pickers do not consolidate items into complete orders. We recognize that both approaches are used in real-world systems, and each creates a unique problem setting that warrants its own research focus. The metrics in our study—overall completion time and number of required robot minimization—also differ from that in Boysen et al. (2017), which focus on minimizing the number of pods utilized in a time window. We emphasize that our research directly models the number of robots required to support schedules seamlessly. This is a metric not previously investigated theoretically in the literature and leads to a novel optimization problem structure.
Related RMF literature and position of this study.
Related RMF literature and position of this study.
Note. (1) Inventory Allocation; (2) Pod Selection; (3) Pod Scheduling; (4) Pod Location.
CR = computational complexity results; #P = maximum number of pickers considered; SKU = stock keeping unit; RMF = robotic mobile fulfillment.
References are listed in chronological order, with alphabetical ordering within the same year.
Next, we briefly discuss the three studies in Table 1 that investigate pod selection or scheduling problems. Note that all studies reviewed here involve a single RMF system, as does our paper. In an RMF system, pickers continuously pick items from pods and put them into bins, which are then placed on conveyors. As such, picking operations constitute an integral part of such a system, and it is imperative to improve this step to ensure overall fulfillment performance. In this context, Xie et al. (2021) focus on the assignment of orders and pods to pickers, which we call the pod-to-picker assignment component of pod scheduling (the other component is pod sequencing). They use integer programming formulations to model pod-to-picker assignments and order-to-picker assignments. The authors find that the decomposition of orders into individual items can increase throughput. This finding partly explains why the industry often uses the strategy of splitting orders into individual items, allowing them to be picked by different pickers and/or at different times, as in our case. Wang et al. (2022) explore the human factor side of pod scheduling in RMF systems. The authors conclude that approaches that schedule pods with pickers should take human working state fluctuations into account to yield better performances. In our research, we consider human factors as an extension, where we account for the impact of human fatigue as an interval progresses. Boysen et al. (2017) determine the processing sequence of orders and arrival sequence of pods to pickers using dynamic programming and a heuristic beam search procedure. The authors provide analytical discussions on the number of pod moves objective. To the best of our knowledge, our study is the first to establish a direct theoretical relationship between pod schedules and the number of required robots to support them (cf. theoretical objectives column in Table 1). In particular, we establish the complexity status of pod scheduling as a stand-alone problem under the objectives of OCT and NRR.
Finally, we draw the reader’s attention to the sizes of considered representative systems in the literature, measured in the number of pickers (#P column of Table 1). For example, Boysen et al. (2017) and Roy et al. (2019) simulate a system with a single picker in their respective studies. Conversely, Weidinger et al. (2018) consider a system as large as 20 pickers in some of their simulation experiments. We present a theoretical analysis of the stand-alone pod scheduling problem under the throughput maximization (i.e., OCT minimization) objective, focusing on two pickers for simplicity. Notably, the theorems established in Section 4.1 for this problem continue to hold if there are more than two pickers in the system. In a similar vein, the stand-alone pod scheduling problem of minimizing NRR is theoretically investigated with one picker in the system. In our numerical experiments with multiple pickers, we plan the number of robots for each individual picker. Hence, our theoretical results for NRR minimization continue to hold for the multi-picker case. In particular, we perform computational experiments to illustrate our approach up to 12 pickers, and it could handle many more. Lastly, we would like to refer interested readers to Allgor et al. (2023) and Qin et al. (2022) for details on RMF system deployments by Amazon and JD.com, respectively.
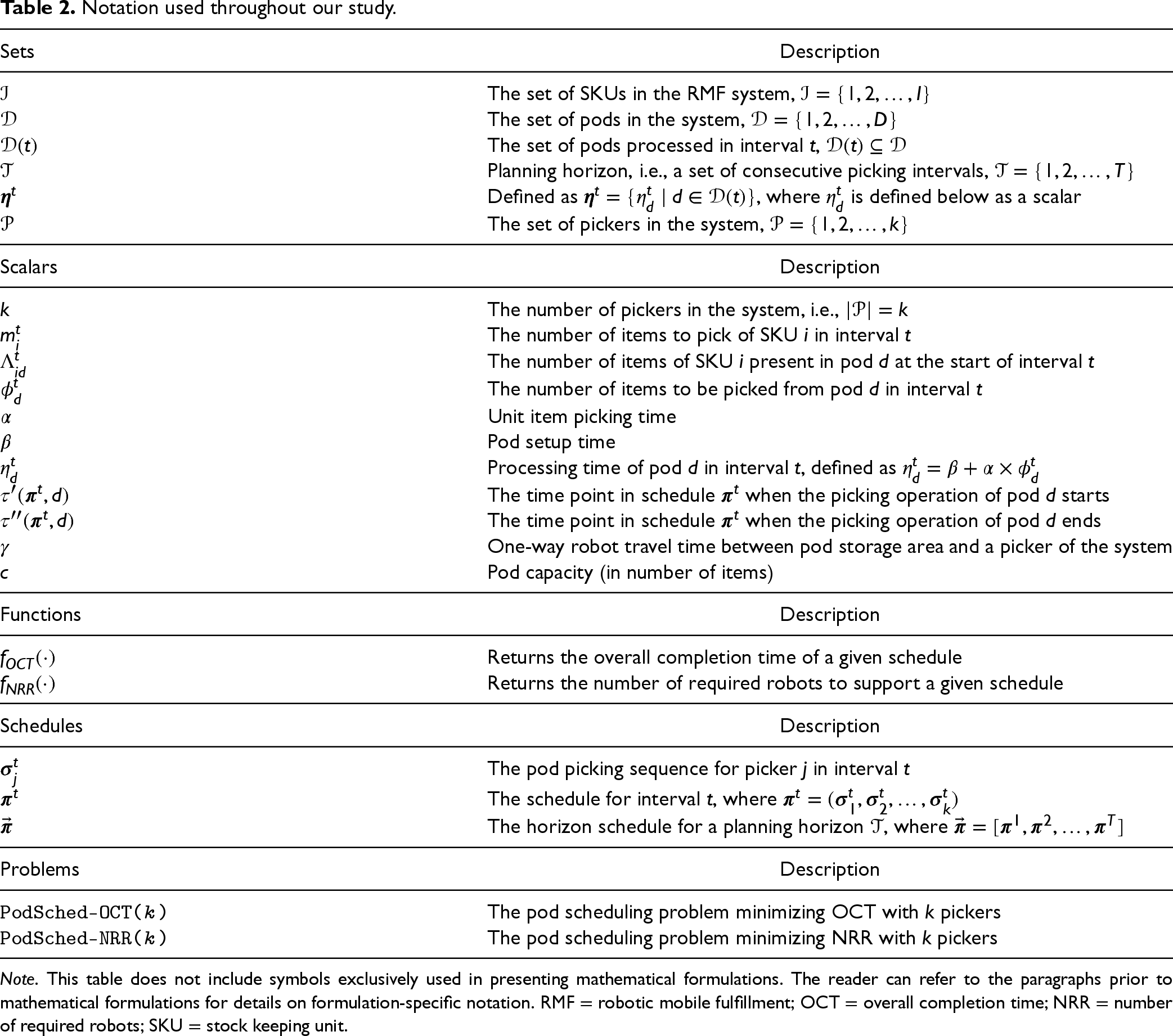
We consider an RMF system operating continuously across multiple picking intervals. SKUs in the system constitute the set
Notation used throughout our study.
Notation used throughout our study.
Note. This table does not include symbols exclusively used in presenting mathematical formulations. The reader can refer to the paragraphs prior to mathematical formulations for details on formulation-specific notation. RMF = robotic mobile fulfillment; OCT = overall completion time; NRR = number of required robots; SKU = stock keeping unit.
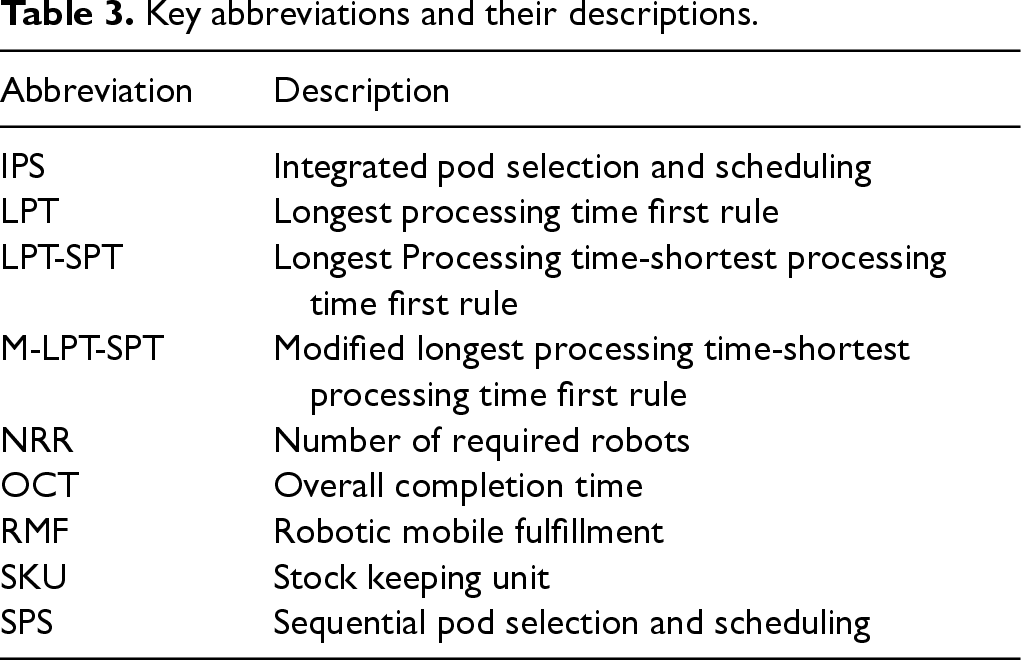
Key abbreviations and their descriptions.
This study builds on two practice-supported assumptions. First, we treat multi-item orders as fully decomposable at the individual item level at the picking step. Thus, pickers solely focus on retrieving items from pods, placing them in labeled bins, and placing those bins on conveyors. As noted in practical application literature (Allgor et al., 2023; Xie et al., 2021; Yuan et al., 2019), order merging and packing operations are conducted in separate stations and outside the picking scope. As such, merging and packing are beyond the scope of our research. Second, again in line with literature and practice, item-picking demands are known at the start of an interval, and an order is only assigned to a particular RMF system if there is sufficient inventory to fulfill it at the start of an interval. However, we relax this second assumption when we consider stockouts in our computational extensions. Having introduced the fundamental notation and the setting, we now present the pod scheduling problem independent of the pod selection problem (i.e., taking the pod selection solution as given).
Defining and investigating the pod scheduling problem independent of the pod selection problem can provide theoretical insights into its structure. Furthermore, the solution to the stand-alone pod scheduling problem can be applied in any sequential approach that handles pod selection and scheduling separately. We build such a sequential approach in Section 5.1, which is later shown to achieve faster computation times compared to an integrated approach while still producing comparable solutions. To this end, we next explore the stand-alone pod scheduling problem under the OCT and NRR minimization objectives, respectively.
The pod scheduling problem must be solved at the beginning of each interval. Assume that subsequent to the solution of the pod selection problem for an interval
Pod Scheduling Problem Under OCT Minimization
We use the notation
Consider an RMF system with
The set
Considering a single interval
The proof of this lemma is provided in Section EC.1 in the e-companion. This lemma implies that
The proof of this theorem is given in Section EC.1. Although
The LPT rule provides an asymptotically optimal solution for
The proof of this theorem is given in Section EC.1. Note that the results in Theorems 1 and 2 hold true for the general problem of
We also observe that the structure of the pod scheduling problem under OCT minimization resembles the makespan minimization problem with identical parallel machines (Graham, 1969). However, this structural similarity disappears entirely when the pod selection problem is incorporated in Section 5. In contrast, the pod scheduling problem under NRR minimization (when the pod selection problem is solved a priori) has a novel and unique structure that, to the best of our knowledge, has not been previously investigated in any stream of literature, including the machine scheduling literature.
For a given picking interval
the optimal solution to In this case, the LPT rule is optimal in solving
Regardless of whether either of these two cases holds, a useful worst-case performance bound on the LPT rule can be established. Consider a general instance of the problem 
Lastly, we briefly discuss how picker-to-pod ratios can help explain the system’s response to different pod capacity values (
Similar to the case with OCT minimization, we use the notation
Consider an RMF system with
The set
For a given picking interval Moving it to a picker, remaining under it during item retrieval, and returning it to the storage area. The schedule
So, in the figure, the top horizontal line represents the time period during which a robot is occupied with pod

Since an
For
Definition 3 implies that if two pods are processed consecutively,
Assume the same 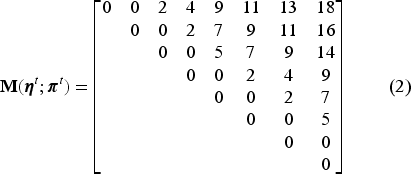
Define 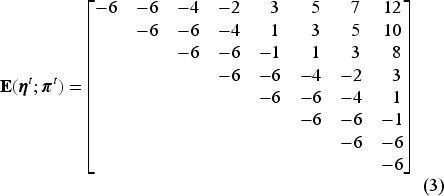
Finally, denoting the
The proof of Theorem 3, given in Section EC.1, is by reduction from the equal-cardinality partition problem, which is known to be NP-complete (Garey and Johnson, 1979: SP12 on p. 223). Although
Consider an RMF system with one picker and a planning horizon
Let
Consider an instance of 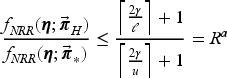
The proof of Theorem 4 and the lemmas leading to it are given in Section EC.3. Theorem 4 sets a worst-case bound for the performance of any list scheduling rule. In the next two theorems and the resulting corollary, we show that the LPT-SPT rule has a better performance bound for the problem
Consider an instance of 
The proof of Theorem 5 and the lemmas leading to it are given in Section EC.4. The below theorem establishes a second performance bound for the LPT-SPT rule, which then leads to a corollary.
Consider an instance of 
The proof of Theorem 6 and the lemmas leading to it are given in Section EC.5. The corollary follows.
Consider an instance of 
Lastly, we introduce the modified LPT-SPT (M-LPT-SPT) sequencing rule, which is built from an LPT-SPT schedule. To construct an M-LPT-SPT schedule, we select pods in pairs from alternating ends of the LPT-SPT schedule and schedule the pods in this new order. Specifically, we start with the two leftmost pods in the LPT-SPT schedule, followed by the two rightmost, and continue this pattern—excluding pods already scheduled—until all pods are assigned. We provide a working example for the M-LPT-SPT rule in Section 6. We note that the theoretical performance bounds we provided above for the LPT-SPT rule, given in Theorems 5, 6, and Corollary 1, hold true for M-LPT-SPT rule as well, without requiring any modifications to their respective proofs. The reason for this is the structure of the referenced theorems and corollary. In particular, in the proofs of Theorems 5 and 6, we build specific problem instances to derive our bounds. In these specific instances, we consider two distinct integers as pod processing times:
In the e-companion, we devise a novel NRR minimization formulation to find the optimal NRR for the single-picker case, considering multiple consecutive picking intervals (i.e., a horizon). This formulation allows us to perform computational experiments to evaluate the average-case performance bounds of the LPT-SPT rule on practically relevant problem instances. The formulation and the average-case performance bound results are presented in Section EC.6. The average-case performance bounds suggest that the LPT-SPT rule performs much better than its theoretical worst-case bound
Another NRR minimization formulation similar to the one given in Section EC.6 will be presented in Section 6.2, where we introduce a hypothetical perfect information case to serve as a lower bound in our computational experiments. Both of these two novel formulations are derived from specific theoretical properties of the schedule distance matrices (such as the one given in Example 2), explained next. We first define the concept of the
For an upper triangular
The following lemma constitutes the main premise of our novel NRR minimization formulations in Sections EC.6 and 6.2. The lemma (with its proof in Section EC.7) establishes that it can be checked if the number of robots required to support the horizon schedule is exactly
Let
We have established that
In particular, let
For Restricted Form B, associated with a pod processing time set 
Theorem 7 provides a means to determine a lower bound on the optimal NRR value for any
In this section, we investigate how the pod selection problem connects to the pod scheduling problem and consider the study’s primary objective of minimizing OCT. Pod selection and scheduling processes follow each other in practice. First, based on a known inventory allocation scheme with a set number of pods and SKU-level stock information for each pod, 10 the system identifies which pods to use within each picking interval and the number of items to pick from each pod to meet the assigned picking demand. Second, the selected pods are scheduled with the pickers.
We provide two primary approaches to implement the pod selection process. First, as a scalable heuristic for large problem instances, the pod selection problem can be formulated and solved using an intuitive objective, such as minimizing the number of pods sent to pickers within an interval (Boysen et al., 2017; Xie et al., 2021). The selected pods can then be scheduled using a rule like the LPT rule, which has been shown to be asymptotically optimal in minimizing OCT with multiple pickers (cf. Section 4.1). We call this first approach sequential pod selection and scheduling (SPS). Second, the pod selection and scheduling problems can be solved together within a single formulation to simultaneously find solutions to both in an integrated manner. We label this second approach as integrated pod selection and scheduling (IPS).
We note that the OCT of a schedule is determined by the first component of the scheduling problem (pod-to-picker assignment) rather than the second component (pod sequencing). This means that as long as the pod-to-picker assignments remain unchanged, the processing sequence of pods for each picker can be altered without affecting the OCT. We will leverage this concept in Section 6 to minimize NRR while preserving the OCT levels achieved by either approach—SPS or IPS.
SPS to Minimize OCT
If the pod scheduling problem is to be solved independently as the SPS approach prescribes, the number of items to pick from each pod
Given a picking interval
We provide an integer programming formulation for this problem, involving two sets of variables. First, the integer variable 




The objective function (4) minimizes the total number of pods processed during picking interval
In this section, we incorporate the pod selection and pod scheduling problems into a single mixed-integer program formulation. This formulation is designed to be solved at the start of each interval
The decision variables for this formulation include 








The objective is to minimize the OCT of the focal interval
Both approaches (SPS and IPS) clearly demonstrate that once the pod selection problem is introduced, the structure of pod scheduling with OCT minimization diverges significantly from that of makespan minimization with multiple machines. In our context, the number and processing times of pods to be processed (analogous to job processing times in machine scheduling) are determined by the pod selection solution. In contrast, in makespan minimization, these parameters are exogenous. Additionally, our context introduces the complexity of considering inventory levels in each pod and the specific demand that must be met, further differentiating it from traditional makespan minimization problems.
Once the pod-to-picker assignments are determined using either sequential or integrated pod selection and scheduling approaches, the OCT for the focal interval is established. With the OCT fixed, the next step is to decide the pod sequences for each picker to minimize NRR without altering the pod-to-picker assignments. We present two rules to accomplish this: LPT-SPT and M-LPT-SPT.
LPT-SPT and M-LPT-SPT Rules
The LPT-SPT sequencing rule offers a simple yet effective method for building pod sequences from given pod-to-picker assignments. For a given interval
Assume that for an interval
in an RMF system with
pickers, we apply either SPS or IPS to obtain the pod-to-picker assignments as shown in Table 4. This table also presents the number of items to be picked from each pod
, denoted as
, as determined by either approach. Then, assuming a unit picking time of
minute per item and a pod setup time of
minutes, we can calculate the processing time for each pod
, denoted as
, which is provided in the last row of Table 4.


The longest processing time-shortest processing time (LPT-SPT) interval schedule
built for Example 3.

The modified longest processing time-shortest processing time (M-LPT-SPT) interval schedule
built for Example 3.
The longest processing time-shortest processing time (LPT-SPT) interval schedule
The modified longest processing time-shortest processing time (M-LPT-SPT) interval schedule
From this table, the OCT of this picking interval can be calculated as
M-LPT-SPT is a modified version of LPT-SPT. To create an M-LPT-SPT schedule, we begin with the LPT-SPT schedule and then start selecting pairs of pods from the left and right sides of the LPT-SPT schedule and build the new schedule in this order. In other words, starting with a picker, we take two pods from the leftmost side of the LPT-SPT schedule and assign them as the first and second pods in the new M-LPT-SPT schedule. Next, we take the two rightmost pods from the LPT-SPT schedule and assign them as the third and fourth pods in the new schedule. Continuing this pattern, we select the next two leftmost pods, excluding those already scheduled, and place them as the fifth and sixth pods in the new schedule. This alternating selection and scheduling process repeats until all pods are scheduled, finally leading to the complete M-LPT-SPT schedule. For example, for
The sequencing rules introduced here are applied within an interval, meaning that when LPT-SPT or M-LPT-SPT is used in interval
Here, we will minimize the number of required robots to support a single picker’s horizon schedule. We do this minimization for all pickers
Let
The formulation includes three types of decision variables: 








In the above formulation, the objective (18) is to minimize the number of robots required to support a picker’s horizon schedule. To this end, constraints (19) and (20) together ensure that either all elements of the
This section presents our computational study using order data from JD.com (Shen et al., 2020). Our analysis focuses on an individual fulfillment center that processed 21,834 customer orders in a month, with each customer order containing approximately 1.15 unique SKUs and 1.35 items on average. For our study, we consider a single RMF system operating within this fulfillment center.
To increase the order volume and create a larger, more complex RMF system, we expand the data by resampling. First, we decompose customer orders into SKUs they contain, resulting in a total of 25,096 decomposed orders. This transformation ensures that the resampling process more accurately preserves the underlying SKU demand distributions, as opposed to resampling multiple SKUs as inseparable blocks. 11 Second, we further increase the number of orders by a factor of three by random sampling with replacement. Expanding the data in this manner helps highlight performance differences in the pod selection and scheduling strategies through our computational study. 12
We assume the RMF system releases batches of 600 orders at the start of an interval to be picked within the interval, yielding
As inventory allocation and replenishment fall outside the scope of our research, we present our computational study results under two inventory allocation policies as controls: (i) Random and (ii) similarity-based. The random policy reflects real-world practices where inventory is distributed in the order of arrival at the fulfillment center without optimization. Amazon uses this policy in its RMF systems (Allgor et al., 2023). In contrast, the similarity-based policy, which is favored in the RMF literature, assigns frequently picked SKUs to the same pod to reduce the number of pods needed in an interval, potentially improving picking efficiency. Sections EC.9 and EC.10 present the implementation details for the random and similarity-based inventory allocation policies, respectively. Since the similarity-based inventory policy requires two interval sets (training and test), in what follows, we divide the 125 picking intervals into a training set of 50 intervals and a test set of 75 intervals.
Regardless of the type of inventory policy applied, we start all intervals with the selected inventory scheme and full inventory to establish control. This approach allows us to control for variability in the inventory schemes, and ensures that any observed differences in performance are due to the effects of SPS/IPS and LPT-SPT/M-LPT-SPT rather than inconsistencies in initial inventory distribution. In the base case analyses, we assume a pod capacity of
In what follows, we consider (i) SPS and IPS with respect to their performance in minimizing OCT (Section 7.1), and the sequencing rules, LPT-SPT and M-LPT-SPT, with respect to their performance in minimizing NRR (Section 7.2). This computational study flow is depicted in Figure 6 for ease of reference. Furthermore, in Section 7.3, we provide managerial guidelines on determining an appropriate number of pickers for RMF systems based on a target OCT value. Lastly, in Section 7.4, we present our robustness and sensitivity analysis with six extensions.
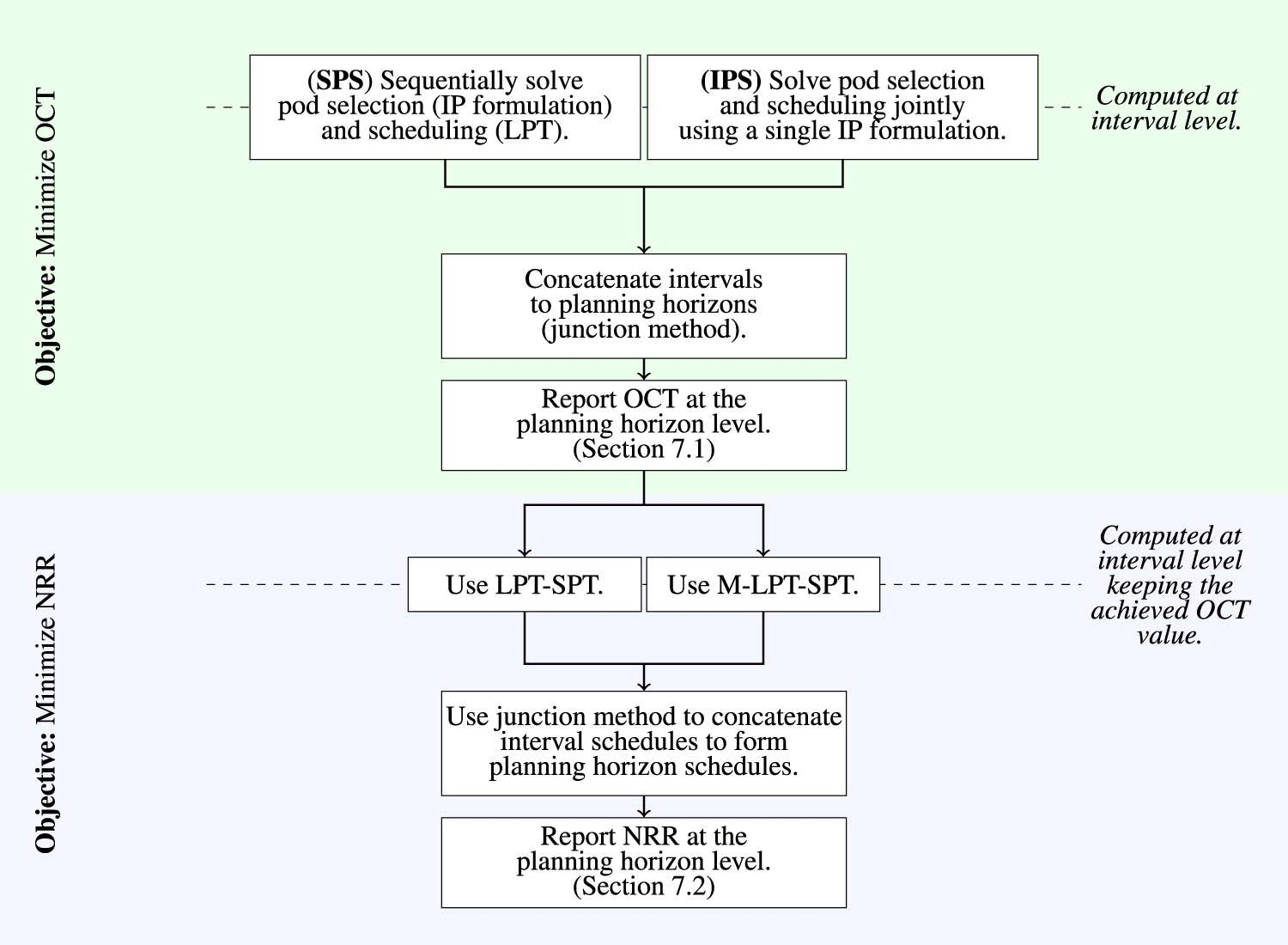
The flow of the computational study section.
We apply SPS and IPS to each interval in the test set, which consists of 75 intervals. These 75 intervals are then grouped into 15 planning horizons, with each horizon containing five intervals, to evaluate the performance of the proposed approaches when multiple intervals are considered consecutively. Intervals within the same planning horizon are concatenated using the junction method (Section EC.11).
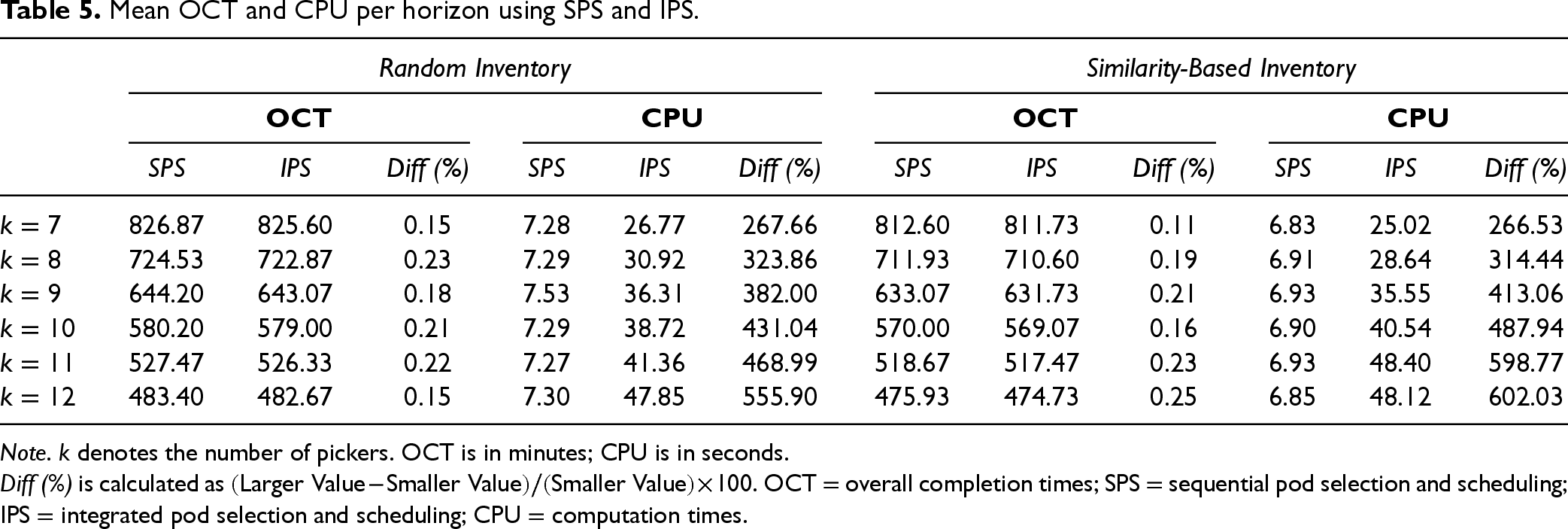
Table 5 presents the mean OCT and computation times (CPU) per horizon for different picker counts (
Mean OCT and CPU per horizon using SPS and IPS.
Mean OCT and CPU per horizon using SPS and IPS.
Note.
Diff (%) is calculated as
When we compare SPS to IPS in Table 5, we observe that IPS consistently returns a slightly smaller OCT, as expected, since it addresses the two problems in an integrated manner. However, the differences are minimal across all picker counts and both inventory policies (random and similarity-based). Under the random inventory policy, the percentage difference between the two approaches ranges from 0.15% to 0.23%, remaining less than half a percent. With the similarity-based inventory policy, the percentage difference is nearly the same, ranging from 0.11% to 0.25%, also staying well below half a percent.
When comparing the computation times (CPU), we see that SPS maintains a relatively low and constant computation time across different picker counts (around 7–8 seconds per horizon). In contrast, the computation time of IPS increases as the number of pickers increases. This suggests that while IPS may offer slightly better OCT performance, the difference is marginal and comes at a significant computational cost. Given the importance of speed in real-time decision-making (since solutions must be generated at the start of each interval) in the RMF context, SPS is preferable due to its much faster computation times, with only up to a 0.25% compromise in OCT performance. In particular, as the number of pickers increases, IPS becomes significantly slower than SPS, taking up to seven times longer to solve the pod selection and scheduling problems. Additionally, while there are 2,623 unique SKUs in our selected mid-size facility, we are aware of larger fulfillment centers that manage tens of thousands of SKUs. Note that IPS would be significantly harder to solve to optimality for these larger systems as the number of variables grows (cf. Section 5.2). Conversely, SPS would still return comparable solutions in near-constant computation times.
After achieving our primary goal of minimizing OCT with either SPS or IPS, we proceed to sequence the pods for each picker, maintaining the previously determined pod-to-picker assignments to keep the achieved OCT level. This approach allows us to decompose the scheduling problem (with NRR minimization objective) to individual pickers, enabling us to consider only the pod-processing sequence for each picker. Retaining the pod-to-picker assignments and addressing the NRR minimization problem at the individual picker level is necessary for a practically relevant and applicable approach, as solving NRR minimization for multiple pickers simultaneously would otherwise constitute a highly complex combinatorial problem with the solution space growing exponentially with each added picker. 13 Hence, in this sequencing phase, we apply one of two sequencing rules, LPT-SPT or M-LPT-SPT, for each picker. This also means our theoretical results of worst-case bounds given in Section 4.2 are relevant here. For brevity, we report only the results where SPS is used to minimize OCT, as it achieves similar OCT performance to IPS but with considerably faster computation times.
To benchmark the performance of these sequencing rules, we compare the results against a lower bound established by a perfect information case. In this case, we assume that the demands of all five intervals in a horizon are known at the start of the first interval, allowing us to apply the formulation presented in Section 6.2. This perfect information scenario provides lower bounds that are unachievable in real-life RMF applications, as the demands of future intervals are unknown when making decisions at the start of the current interval. Hence, the lower bound serves as an idealized comparison point for the results obtained using LPT-SPT and M-LPT-SPT.
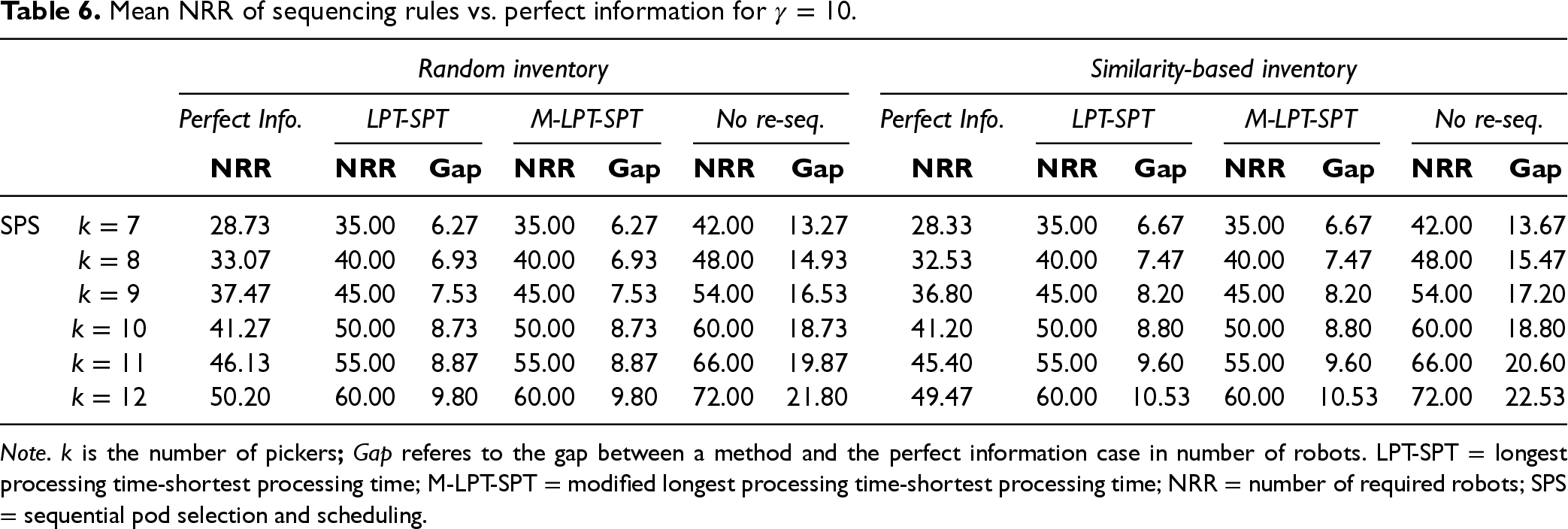
Solving the pod selection and scheduling problems with the SPS approach already provides pod-to-picker assignment and pod sequences for each picker. However, we are also interested in assessing how much LPT-SPT and M-LPT-SPT decrease the NRR values compared to the original sequences generated by SPS. By analyzing the differences, we can quantify the extent to which sequencing strategies reduce NRR. To facilitate this comparison, we include the NRR values from the original SPS-generated sequences in our result tables under the label No re-seq.
Since robot travel time can significantly impact the NRR metric, we examine scenarios with varying one-way travel times:
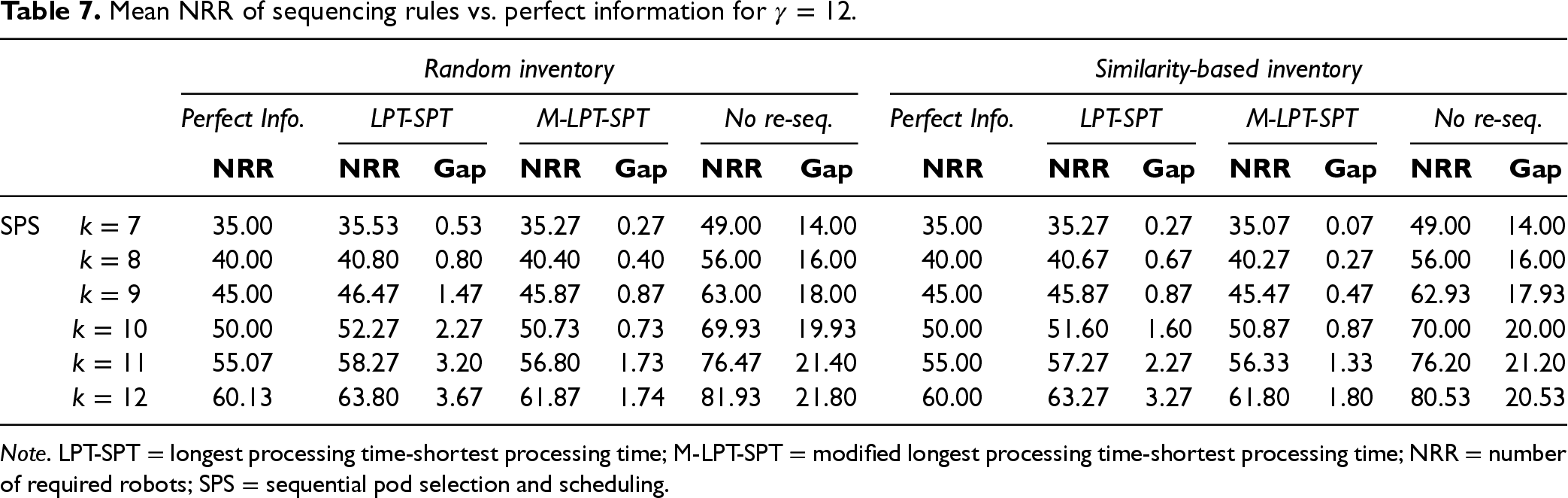
Mean NRR of sequencing rules vs. perfect information for
.
Mean NRR of sequencing rules vs. perfect information for
Note.
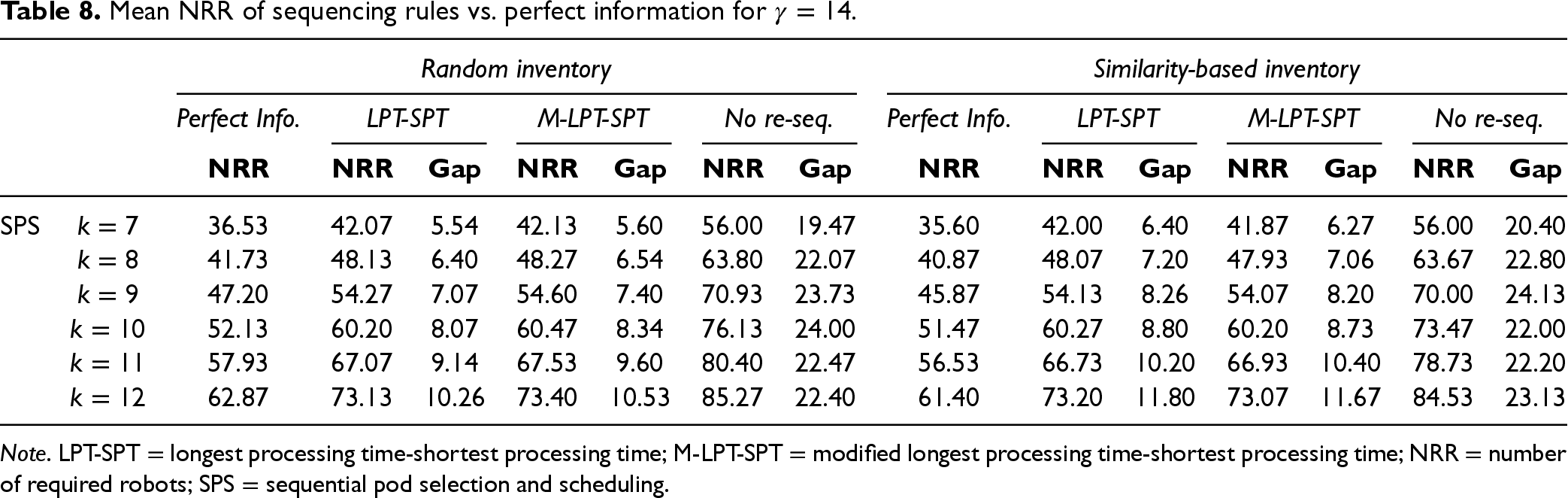
Mean NRR of sequencing rules vs. perfect information for
Note. LPT-SPT = longest processing time-shortest processing time; M-LPT-SPT = modified longest processing time-shortest processing time; NRR = number of required robots; SPS = sequential pod selection and scheduling.
Mean NRR of sequencing rules vs. perfect information for
Note. LPT-SPT = longest processing time-shortest processing time; M-LPT-SPT = modified longest processing time-shortest processing time; NRR = number of required robots; SPS = sequential pod selection and scheduling.
Mean NRR of sequencing rules vs. perfect information for
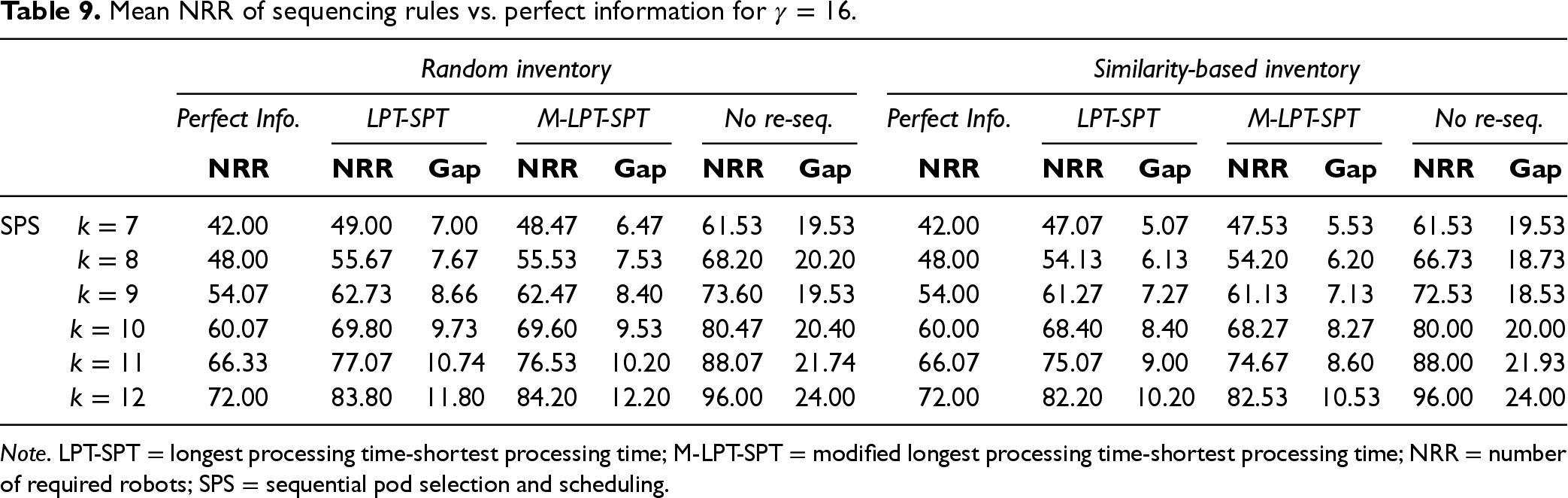
Note. LPT-SPT = longest processing time-shortest processing time; M-LPT-SPT = modified longest processing time-shortest processing time; NRR = number of required robots; SPS = sequential pod selection and scheduling.
We highlight the NRR minimization advantage achieved by the LPT-SPT and M-LPT-SPT rules compared to the case where no sequencing rules are applied on the original SPS schedule (see No re-seq. columns in Tables 6 to 9). The best-performing sequencing rule (LPT-SPT or M-LPT-SPT, depending on the considered experiment setting) can reduce NRR by up to 16.7%, 28.4%, 25.2%, and 23.5% for
Comparison of LPT-SPT and M-LPT-SPT
Although Tables 6 to 9 show that sequencing rules significantly reduce the number of required robots compared to no re-sequencing, the preferred rule under different conditions is not immediately clear from the presented results. For example, when the one-way robot travel time is
From a managerial perspective, our findings indicate that when pod processing times are highly left-skewed (i.e., when almost all pods have very short processing times), the performance gap between LPT-SPT and M-LPT-SPT may be negligible, suggesting that either rule can be applied without significant trade-offs. However, in balanced distributions (i.e., when the distribution is not highly left-skewed), M-LPT-SPT is preferable when shorter processing pods dominate, while LPT-SPT is the better choice when longer processing pods are more common. Therefore, managers should consider their pod processing time distributions when selecting a sequencing rule.
Deciding the Number of Pickers for a Target Mean OCT Value
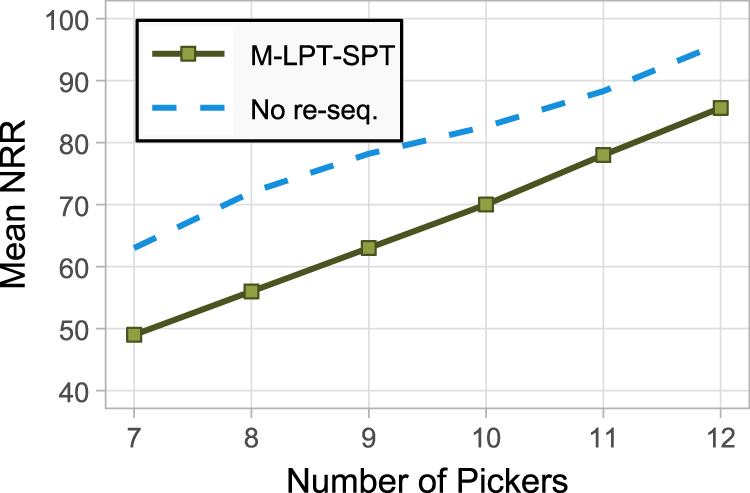
In practice, our computational study design can guide decisions about the number of pickers needed in any RMF system to achieve a target mean horizon OCT value. For the system under consideration, OCT values from our computational study are presented in Figure 7 for different numbers of pickers. For instance, if system management aims for a mean horizon OCT of 600 minutes or less, the figure shows that at least ten pickers are required. While increasing the number of pickers reduces OCT, it also increases the number of robots required. For example, Figure 8 illustrates the mean number of robots required for different picker counts based on (i) the M-LPT-SPT rule (in solid line) or (ii) no re-sequencing case (dashed line), both under the SPS approach, random inventory allocation policy, and a one-way robot travel time of
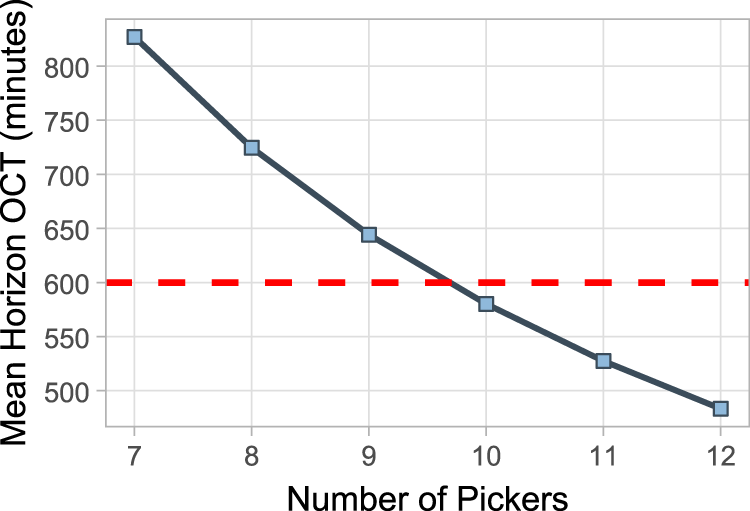
Mean horizon overall completion time (OCT) for different numbers of pickers.
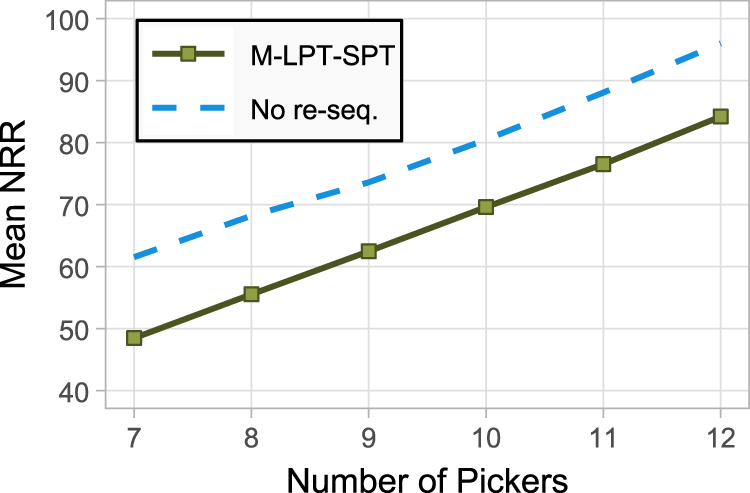
Mean horizon number of required robots (NRR) for different numbers of pickers.
Our proposed sequencing rules (LPT-SPT and M-LPT-SPT) can help RMF system managers strike a balance between OCT and NRR. The target OCT level of 600 minutes required ten pickers in the system. Then, Figure 8 illustrates that ten pickers require around 80 robots, on average, if no sequencing rule is utilized. However, if M-LPT-SPT is used to resequence the pods within each picker’s schedule, the mean NRR decreases to approximately 70 robots. Mean NRR constitutes a fundamentally operational metric because it measures the number of robots deployed from a given fleet, on average. RMF system managers can also use our computational study structure to determine the fleet size for a particular system by considering a near-worst-case statistic, such as the 95th percentile (Figure 9). This would allow managers to maintain a safety buffer in terms of required robots for most of the planning horizons, while ensuring that the fleet size will be sufficient for 95% of the horizons. This consideration can help managers in two key decision contexts:
When an RMF system needs to be operationalized for the first time, some typical demand data is available (or can be estimated), and the management wishes to decide the number of robots to purchase and when there are multiple RMF systems in operation in a single facility, and the robots available in the facility needs to be assigned to individual systems, with little to no robot movement between different RMF systems, as is often the case in practice.
Lastly, we note that although Figures 8 and 9 are given for the SPS approach, random inventory allocation policy, and
95th percentile horizon number of required robot (NRR) for different numbers of pickers.
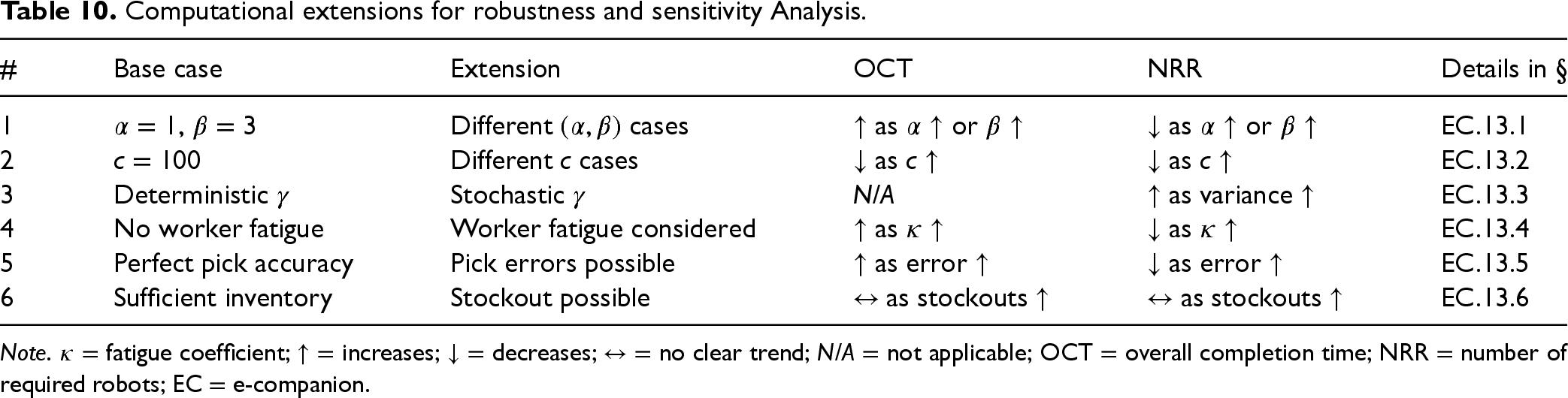
Next, we conduct a robustness and sensitivity analysis to examine how the computational results are impacted by different system conditions and relaxed assumptions. To this end, we define six computational extensions, as summarized in Table 10. We find that the main results of our research consistently hold across all six extensions. In particular, SPS always provides OCT solutions within half a percent of IPS across all extensions while significantly reducing computation times. Furthermore, the best sequencing rule (LPT-SPT or M-LPT-SPT, depending on the case) always reduces mean NRR compared to no-resequencing, with the average reduction ranging from 17.3% to 23.5% in the considered extensions.
Computational extensions for robustness and sensitivity Analysis.
Computational extensions for robustness and sensitivity Analysis.
Note.
We summarize key insights from the computational extensions, with detailed results provided in Section EC.13. First, longer pod processing times reduce the mean NRR values (e.g., in extensions 1, 2, 4, and 5) by spreading out the frequency at which pickers require a new pod at their stations. With more time spent on each pod, robots are under less pressure to deliver the next one quickly, reducing the need for many robots moving pods at the same time. As a result, fewer robots are required to sustain the flow of pods, leading to a lower NRR. Second, relaxing the deterministic robot travel time (
RMF systems constitute the latest development in fulfillment center automation practices and are becoming more widely adopted, especially in the e-commerce sector. The operational performance of a deployed RMF system plays an important role, as it directly impacts the time and cost savings achieved by the system. To analyze RMF system performance, this research focuses on two key problems: pod selection and pod scheduling. As system metrics, we focus on overall completion time (OCT, i.e., the time point at which all orders assigned to the system for a planning horizon are fulfilled) and the number of required robots (NRR; i.e., to support a given schedule without any unnecessary picker idle times).
We initially focus on the pod scheduling problem independent of the pod selection problem, considering both OCT and NRR metrics, in order. Next, we expand the study to address both pod selection and scheduling problems for multiple pickers, also focusing on our two key metrics in the same order. To minimize OCT, we introduce and investigate two approaches:
Sequential pod selection and scheduling and Integrated pod selection and scheduling.
The sequential approach solves the pod selection problem first and the pod scheduling problem second. In solving the pod scheduling problem, this approach applies the solutions derived from our theoretical analysis of the stand-alone pod scheduling problem. In contrast, the integrated approach addresses the two problems simultaneously in the same formulation to minimize OCT. The sequential approach offers significantly faster computational times compared to its integrated counterpart while delivering comparable solution qualities. Finally, we re-sequence the schedules produced by these two approaches to reduce NRR while maintaining pod-to-picker assignments to keep the achieved OCT.
Our theoretical contributions to the RMF literature are three-fold. First, to our knowledge, this is the first study to address both pod selection and pod scheduling in RMF using either the OCT or NRR metrics. Notably, the NRR minimization objective introduces a novel optimization problem structure, contributing to scheduling theory even outside the RMF context. Second, we show that the stand-alone pod scheduling problem is NP-hard under both objectives. Third, we demonstrate that the longest processing time first (LPT) scheduling rule is asymptotically optimal for minimizing OCT with multiple pickers. For NRR minimization with a single picker, we provide theoretical performance bounds for the longest/shortest processing time first (LPT-SPT) sequencing rule. This rule alternates between pods with the largest and smallest pod processing times, balancing the workload for robots. We also introduce a modified LPT-SPT sequencing rule (M-LPT-SPT).
The computational study of our research provides three key managerial insights. First, in RMF systems where operational decisions must be made in real-time, the SPS approach is preferable to its integrated counterpart due to its efficient computation time and scalability to systems with a large number of pickers. Specifically, the sequential approach maintains a low and constant computation time regardless of the number of pickers in the system, is up to 7 times faster than the integrated approach, and achieves a mean OCT within half a percent of the integrated approach across all instances. Second, in minimizing NRR, we demonstrate that sequencing rules (LPT-SPT and M-LPT-SPT) yield similar performance when pod processing times are highly left-skewed. However, when processing times are more balanced, M-LPT-SPT outperforms LPT-SPT if shorter processing times are more common, whereas LPT-SPT is more effective when longer processing times are predominant. Our two proposed sequencing rules allow practitioners to select the best one based on their specific pod processing time distributions, reducing mean NRR by 13% to 28% without compromising order completion time, compared to the case where no sequencing rules are used. Lastly, our computational study helps managers determine the number of pickers required in an RMF system to achieve a desired mean OCT. We find that more pickers in the system decrease OCT by distributing the workload, but it also increases NRR, constituting a challenging managerial trade-off. We show that our proposed sequencing rules help managers balance this trade-off more effectively.
Our study points to several avenues for further research. For example, like other work in the field, we consider a single RMF system. However, large e-commerce fulfillment centers might deploy multiple RMF systems that do not share system resources like robots and pods (Reindl, 2023). Designing multiple RMF systems within the same facility can be a promising research direction. Similarly, although we considered worker fatigue in our extensions, we assumed equal picking speeds for all pickers. Future research can examine the performance implications of different human picking speeds.
Supplemental Material
sj-pdf-1-pao-10.1177_10591478251349902 - Supplemental material for Robotic Mobile Fulfillment Systems: Strategies for Pod Selection and Scheduling
Supplemental material, sj-pdf-1-pao-10.1177_10591478251349902 for Robotic Mobile Fulfillment Systems: Strategies for Pod Selection and Scheduling by Kerim U Kizil, Chelliah Sriskandarajah and Jon M Stauffer in Production and Operations Management
Footnotes
Acknowledgment
We thank the department editor and the review team for their constructive feedback and valuable suggestions, which significantly improved this manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Notes
How to cite this article
Kizil KU, Sriskandarajah C and Stauffer JM (2026) Robotic Mobile Fulfillment Systems: Strategies for Pod Selection and Scheduling. Production and Operations Management 35(2): 625–648.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.