
Abstract
This paper provides an extensive review of popular regularization methods utilized in numerical models to stabilize the structural response of materials exhibiting significant softening. The necessity for regularization is highlighted in cases of material softening, which is attributed to the loss of ellipticity in the governing differential equations. It discusses the advantages and disadvantages of the regularization methods most commonly employed in the scientific community. Furthermore, the paper highlights recent advancements, particularly in defining internal length within nonlocal models and characteristic element length in fracture energy regularization methods, as alternative solutions to address the limitations inherent in traditional approaches.
Keywords
Introduction
Quasi-brittle materials, such as concrete, rocks, and composites, exhibit inherent heterogeneity that results in complex mechanical behavior. Even in their unloaded state, these materials contain defects, including micro-cracks and voids. In the initial stages of the fracturing process, both pre-existing and newly formed micro-cracks expand, leading to the formation of a distributed network of micro-cracks as illustrated in Figure 1(a). This network occurs within what is termed the fracture process zone (FPZ), where micro-crack development predominantly takes place. As the loading continues, the propagation and coalescence of these micro-cracks are confined to a progressively narrower band, depicted in Figure 1(b), eventually resulting in the emergence of a visible, macroscopic crack while many other micro-cracks are deactivated during the process of elastic unloading, as shown in Figure 1(c). This evolution of the FPZ leads to a decrease in material stiffness and introduces a softening behavior observable at the macro-scale, which is identified as mechanical damage. Such phenomena can be accounted for by models founded on continuum damage mechanics (CDM).
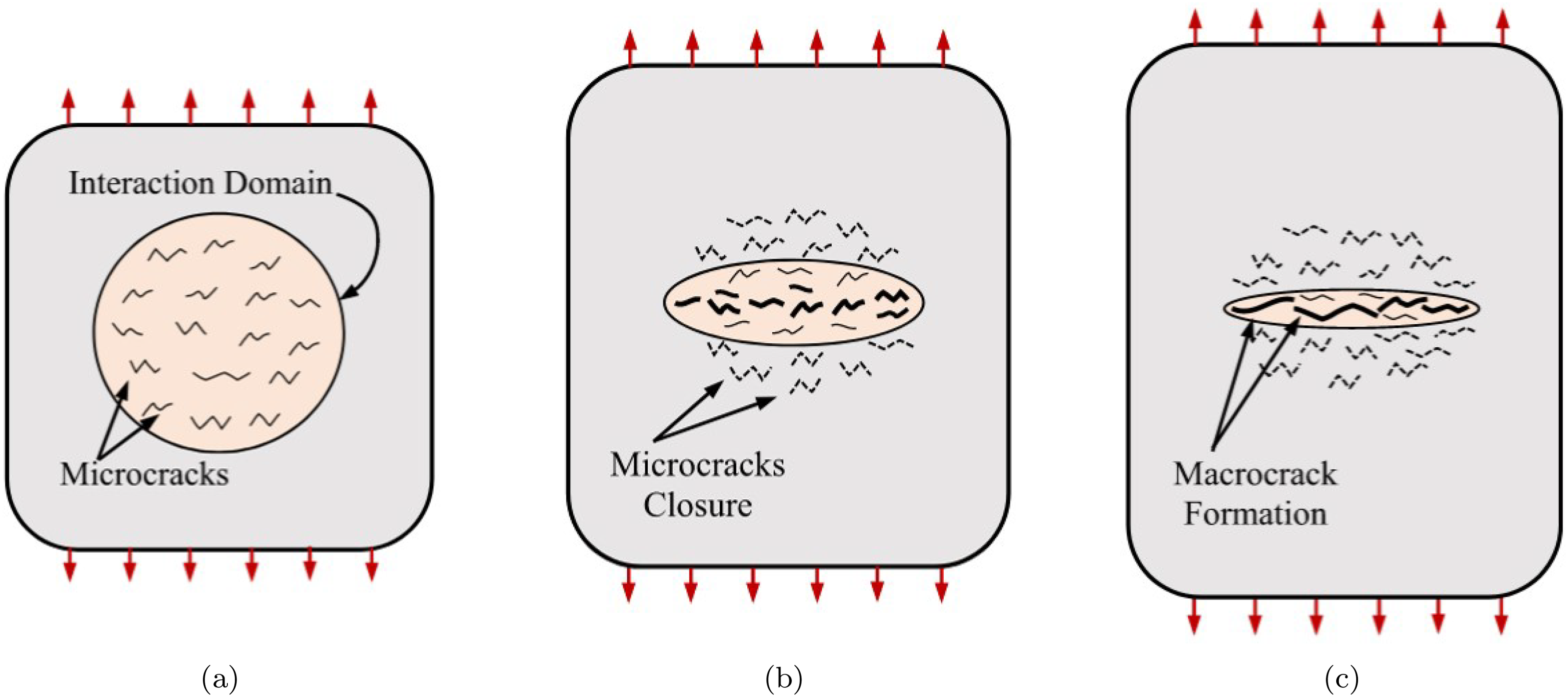
A schematic showing evolution of macro-crack from a diffused network of micro-cracks (Sarkar et al., 2019).
Originating from the seminal works of Kachanov (1958) and Rabotnov (1969), damage models incorporate internal variables to characterize the density and orientation of micro-defects. The simplest form is the isotropic damage model, wherein the damaged stiffness tensor is considered a scalar multiple of the initial elastic stiffness tensor (Mazars, 1984; Mazars et al., 1990). Furthermore, the integration of damage models with plasticity or inelastic strain mechanisms, as explored by Grassl and Jirásek (2006) and Nechnech et al. (2002), addresses the inherent brittleness of pure damage models by accounting for permanent strain. More refined theories account for damage anisotropy using vectors or tensors, as detailed in the works of Desmorat et al. (2007), Halm and Dragon (1998), and Krajcinovic and Fonseka (1981), which provide a more accurate depiction of damage by acknowledging its directional properties.
In structures subjected to extreme loading conditions, strain increments often concentrate in narrow zones, whereas the remaining part of the structure undergoes unloading. This phenomenon, known as strain localization, results in damage being confined to the minimal possible volume. As a result, during the softening phase, the governing differential equations lose ellipticity in a static formulation or hyperbolicity in a dynamic formulation, rendering the boundary value problem ill-posed. Consequently, models based on classical continuum theory are unable to objectively predict post-peak results and localized failure patterns accurately (Bažant, 1976; De Borst et al., 1993). These deficiencies manifest themselves in numerical calculations by displaying a pronounced sensitivity to spatial discretization factors such as the orientation and size of the finite-element (FE) mesh during softening (Bažant and Oh, 1983; Cervera et al., 2010b). Specifically, the dissipated energy and force-displacement response of the numerical model are highly dependent on the FE mesh density (Bažant and Jirásek, 2002; Oliver et al., 2012). Furthermore, the direction of strain localization bands tends to align with the FE mesh lines, affecting the propagation patterns and challenging the objective representation of failure (Cervera and Chiumenti, 2006; Cervera et al., 2010a).
In recent years, various regularization techniques have been developed to enhance the objectivity of continuum damage models (Bažant and Jirásek, 2002). The softening phenomenon is modeled as dependent on the energy dissipation across a representative volume, leading to the adoption of nonlocal formulations (Poh and Swaddiwudhipong, 2009b). Nonlocal theories (Kröner, 1967) propose that the state of any material point within a domain is influenced by the entire domain, thereby ensuring a more comprehensive response to damage. To mitigate strain localization into an arbitrarily small volume, those variables that cause strain-softening are regularized as nonlocal through an internal length scale parameter (Bažant and Lin, 1988a, 1988b). This regularization is achieved using either integral (Pijaudier-Cabot and Bažant, 1987) or gradient (Peerlings et al., 1996) forms, each designed to capture the spatial distribution of damage more effectively. Interestingly, the gradient form, derived from the integral form with the Taylor series, demonstrates that both approaches are equivalent when specific weight functions are applied, highlighting a fundamental consistency within nonlocal theories (Jirásek, 2007b).
Nonlocal damage models have been demonstrated to possess outstanding regularization capabilities, offering mesh-size independent solutions and avoiding zero energy dissipation. However, both standard nonlocal integral and gradient-enhanced damage models still face various numerical challenges. Issues such as incorrect predictions of damage initiation and the emergence of spurious damage zones at the final softening stage have been reported in Geers et al. (1998) and Simone et al. (2004). Additionally, the inaccurate treatment of boundary conditions has been shown to lead to incorrect energy dissipation (Bažant et al., 2010; Jirásek et al., 2004). Furthermore, size effects are often misrepresented, contributing to the limitations of models (Jirásek et al., 2004). These issues can often be attributed to the constant internal length parameter used in standard nonlocal damage models. Consequently, research has explored evolving interaction domains, initiated by pioneering work (Geers et al., 1998), to mitigate spurious energetic interactions and ensure localized damage bandwidths during the final failure stages.
In contrast to the significant computational costs associated with the nonlocal averaging process required across the entire domain in nonlocal damage models, the crack band model (Bažant and Oh, 1983) offers a simpler and more easily implemented remedy. This model necessitates estimating the crack bandwidth, correlating with the element size within the localization zone in numerical models. Subsequently, the stress–strain softening relations for these elements are adjusted to preserve the fracture energy dissipation during softening, thereby ensuring an objective response from the global FE model. This concept underlies the term “fracture energy regularization” (Jirásek and Bauer, 2012). However, it is crucial to note that this approach represents a partial regularization technique. Mathematically, the boundary value problem remains ill-posed, leading to some inherent limitations (Lopes et al., 2020).
Viscous regularization introduces a time-dependent viscous term into the constitutive equations, offering an alternative approach to material behavior modeling. This term adds a rate-dependent behavior to the material, ensuring the ellipticity of the incremental equilibrium equations and addressing the issue of strain localization into infinitesimally small regions (Geers et al., 1994; Needleman, 1988). Incorporating viscosity renders the softening behavior dependent on the time step, ensuring that the tangent stiffness matrix stays positive definite for adequately small time increments (Langenfeld et al., 2018). Consequently, viscous regularization allows for the recovery of a well-posed boundary value problem, enhancing solution stability and reducing its sensitivity to the discretization scheme. However, choosing an appropriate viscosity parameter is critical.
Despite the demonstrated effectiveness of previously discussed regularization techniques in addressing ill-posed material models for (quasi)-brittle damage, certain limitations persist. Furthermore, there are few comprehensive review works on this subject. Bažant and Jirásek (2002) provided a detailed review of various regularization techniques, though this work is now over 20 years old. Simone (2007) and Jirásek (2007b), respectively, reviewed gradient and integral nonlocal damage models. Jirásek and Bauer (2012) offered a comprehensive investigation into numerical aspects of fracture energy regularization. All these contributions date back more than 10 years. Recently, Liu et al. (2022) summarized some regularization approaches in dealing with mesh dependency. Moreover, Langenfeld et al. (2022) presented a concise review, offering unified comparisons of these three regularization techniques within a variational framework. However, this review did not cover the latest modifications to these methods, essential for achieving mesh-independent results without spurious phenomena.
Given this context, this work is primarily motivated to offer a detailed review of recent modifications applied to these regularization techniques. Accordingly, the issues of non-objectivity and mesh dependency in standard strain-softening continuum models are initially introduced. Subsequently, commonly used standard regularization techniques, detailing their advantages and disadvantages, are presented. Following that, modifications of conventional regularization techniques are explored, with a special focus on the definition of internal length in nonlocal damage models and characteristic element length in fracture energy regularization. Finally, some concluding remarks regarding future applications of these techniques are provided.
Non-objectivity in the presence of softening
A continuum model for micro-cracking in quasi-brittle materials leads inevitably to strain softening, a phenomenon that the stresses in a strain-softening material reduce gradually with the increasing of strains due to the growing of micro-cracks and finally reduce to zero as the micro-cracks develop into a major visible crack. To capture this process, CDM introduces damage variables that quantify the degradation of material stiffness caused by micro-cracking. For instance, an isotropic damage variable

The governing equations for a quasi-static problem are given by the equilibrium condition:


For a given damage field
Jirásek (2004, 2007a) analyzed the pathological characteristics of strain-softening solutions in CDM, highlighting the following issues: (i) an infinitely small softening region; (ii) a load-displacement diagram that consistently exhibits snapback; and (iii) zero total energy dissipation during the softening phase.
The non-objectivity associated with strain softening can be effectively illustrated by the example of a simple bar subjected to uniaxial tension. As depicted in Figure 2(a), a straight bar with a constant cross-sectional area
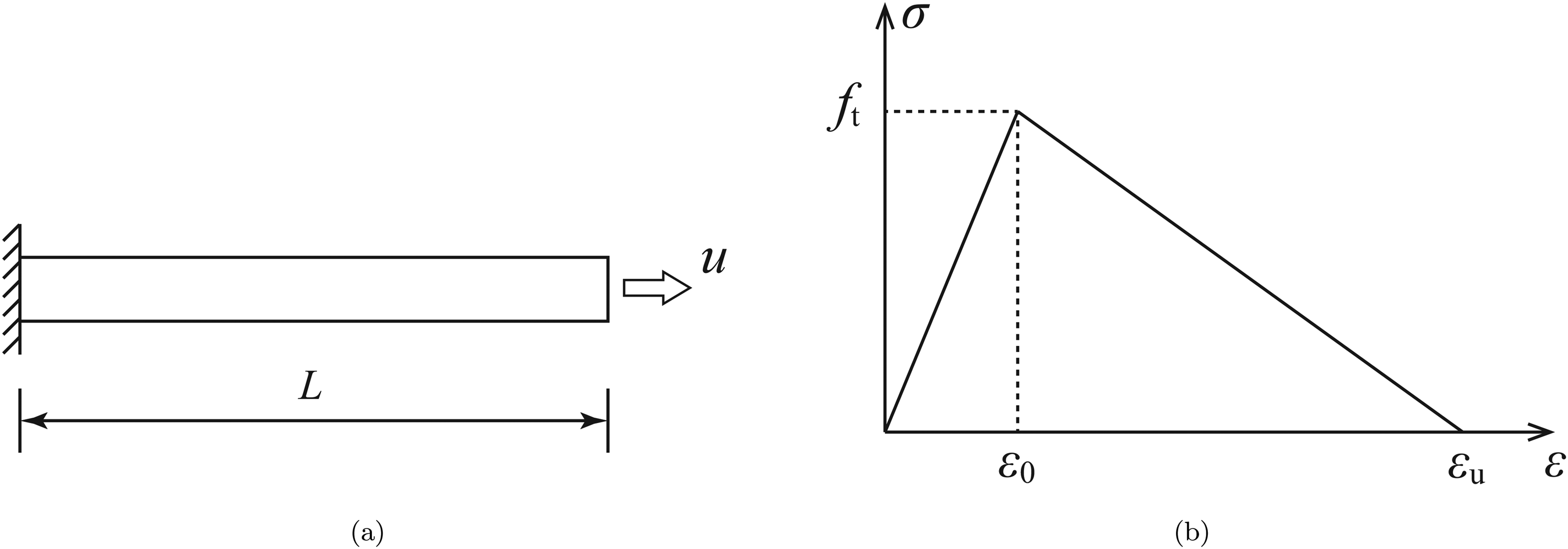
(a) A uniform bar under uniaxial tension and (b) constitutive law with linear softening.
Before reaching peak stress, the strain is uniquely determined by the stress. The strain field is uniform along the bar since the stress field is uniform according to the static equilibrium. The response of the bar is linear elastic up to a displacement

A primary challenge presented by equation (4) is determining the length
In reality, material properties are not perfectly uniform, evidenced by reduced strength in localized regions. When stress reaches this reduced strength, softening initiates within the weakened area, while regions outside it undergo elastic unloading. Consequently, the size of the softening region is determined by the size of these imperfect areas. However, the softening region is often infinitesimally small due to the minor size of the imperfections. As a result, the entire degradation of material properties becomes concentrated within this small volume of imperfections. Such localization results in a perfectly brittle macroscopic fracture behavior, deviating from the anticipated gradual stiffness reduction.
Mesh dependency and sensitivity in FE method-based numerical analyses are clearly illustrated through the given example of a tension bar shown in Figure 3. Consider the bar subdivided into
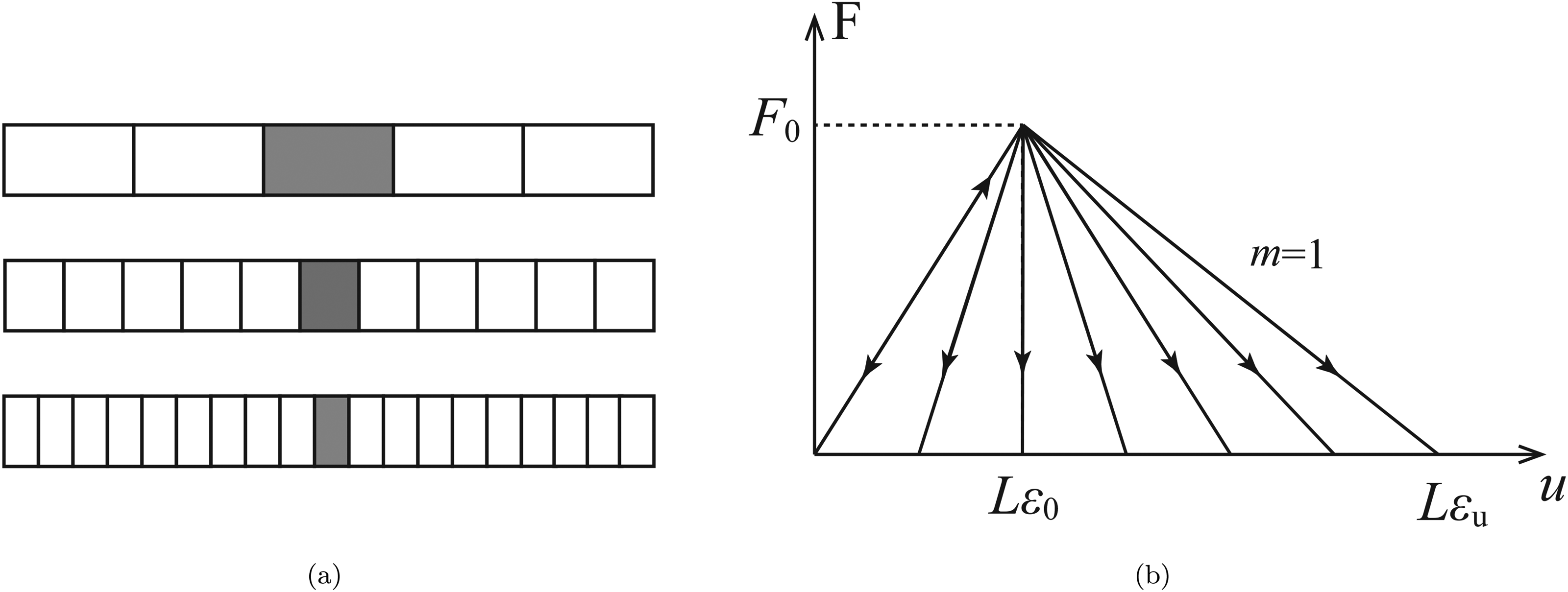
Response of an imperfect bar: (a) strain localization and (b) load-displacement diagrams due to different meshes.
Since only one element undergoes softening while the others are unloading, the ultimate displacement, corresponding to the zero reaction force, can be expressed as:

In general, standard CDM often yields mesh-size dependent results, which originates from the loss of ellipticity in the governing PDEs (De Borst et al., 1993). Achieving objective results in FE analyses becomes challenging due to the computed fracture energy and the corresponding structural response being influenced by the mesh size. Upon mesh refinement, a physically unrealistic situation emerges: an infinitesimally small element size leads to negligible energy dissipation and crack formation (Bažant and Jirásek, 2002). Beyond mesh-size dependency, spurious crack trajectories have been observed, indicating that numerical results can vary with the orientation of the FE mesh. This phenomenon, which may be attributed to a direct consequence of spatial discretization inadequacies, is referred to as mesh-bias dependency (Cervera and Chiumenti, 2006; Cervera et al., 2010a; Jirásek and Grassl, 2008).
Additionally, further mesh refinement in simulations designed for multiaxial conditions often leads to convergence issues in equilibrium iterations at peak loads (Jirásek, 2004). This issue arises because refining the mesh increases the number of potential equilibrium states. Consequently, the complexity of determining the correct combination of loading and unloading at individual Gauss points escalates. During the iterative solution process, the algorithm must “select” from among these equilibrium states and tends to choose a different state in each subsequent iteration. This ambiguity ultimately causes the iterative solution process to diverge (Borst, 2001).
Conventional regularization techniques
The mesh sensitivity in local damage models, caused by the loss of ellipticity, stems from an inherent mathematical nature rather than numerical ones. The scientific community has proposed several regularization techniques to restore objectivity in numerical analyses and render the boundary value problem well-posed with reliable outcomes. This section will overview commonly employed approaches, some of which have been implemented in commercial software. The core idea behind these methods is the introduction of a localization limiter to prevent strain localization into a line, thereby avoiding zero energy dissipation.
The first two approaches involve nonlocal models, which are classified into integral and gradient types based on their formulation. The third method, fracture energy regularization, establishes a direct correlation between fracture energy and mesh size for numerical analyses. The final approach is viscous regularization, which incorporates viscosity into the damage evolution.
Integral nonlocal model
The concept of “nonlocal” might have been first proposed in the 1960s by Eringen (1966) and Kröner (1967), introducing the idea that the stress at a point could depend not only on the state variables at that point but also on the distribution of state variables across the entire body. This concept was then proposed as a localization limiter by Bažant et al. (1984) and later applied to CDM by Pijaudier-Cabot and Bažant (1987). Nonlocal versions of a smeared crack model, a model with softening plasticity, and a microplane model were further proposed by Bažant and Lin (1988a, 1988b) and Bažant and Ožbolt (1990) to address the issue of strain localization. In integral nonlocal damage models (Pijaudier-Cabot and Bažant, 1987), the local variable

The nonlocal weight function,




Investigations by Bažant and Pijaudier-Cabot (1989) reveal that equation (10) typically yields a larger value for
In addition, other functional forms for


To prevent the concentration of local strain at a central point and to ensure that nonlocal plastic strain is distributed over a larger region during plastic softening, Galavi and Schweiger (2010) introduced a new weight function known as the G&S function (Su et al., 2023). This function is mathematically expressed as follows:

Equations (9) to (13), with internal length
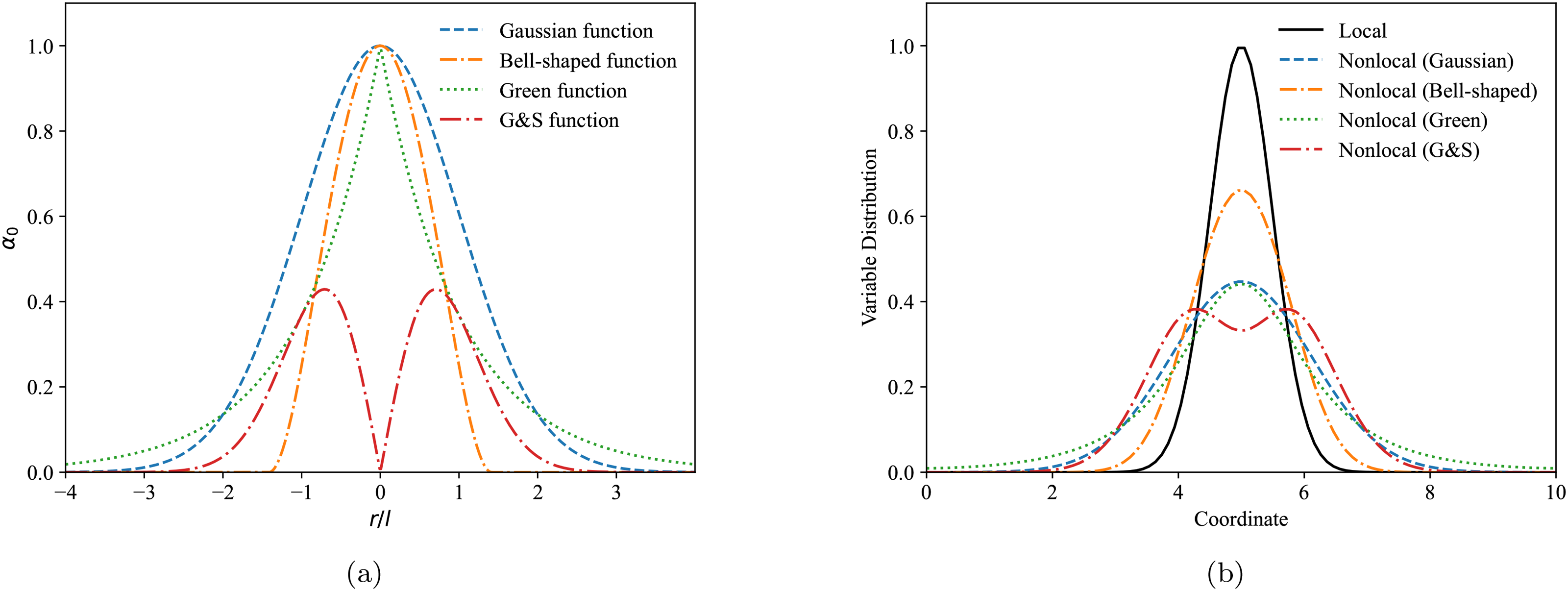
(a) Comparison of different nonlocal weight functions
Although differences exist in the contribution from a neighboring point at the same distance across different weight functions, they all enable the smoothing of the spatial distribution of the local variable, even after localization onset, as exemplified in Figure 4(b). In Figure 4(b), local variables along a bar of length 10 are modeled to follow a Gaussian distribution. Equations (9) and (12) yield the similar regularized results. Though equation (11) presents a slightly different outcome, it can achieve similar results as the other two weight functions by adjusting
The selection of nonlocal variables is crucial for incorporating nonlocality within damaged domains while allowing for a return to the standard local elastic continuum model in cases where material behavior remains within the elastic range (Jirásek, 1998). Bažant and Pijaudier-Cabot (1988) proposed that a nonlocal variable should be defined either as a weighted average of the damage variable itself or of a strain measure. A comparative study, conducted in Jirásek (1998), reveals only minor differences between results obtained using nonlocal damage energy release rates and nonlocal equivalent strain. However, formulations based on the damage variable can lead to spurious stress-locking effects during later stages of softening, a limitation that hinders the modeling of stress-free macroscopic cracks (Jirásek, 1998, 2007b). An innovative alternative, the averaging of the local displacement field, was first discussed in Rodrıguez-Ferran et al. (2004). However, its practical implementation faces challenges due to the need for specific modifications of the averaging operator, as further detailed in Jirásek and Marfia (2005) and Rodríguez-Ferran et al. (2005). Although the use of nonlocal damage energy release rates is physically appealing, the nonlocal strain variable is more commonly adopted due to its versatility and applicability across a wider range of constitutive laws. Commonly utilized strain variables in the literature include the energy norm-based equivalent strain (Jirásek and Patzák, 2002), Von Mises equivalent strain (Peerlings et al., 2001), modified Von Mises equivalent strain (De Vree et al., 1995), Rankine equivalent strain (Jirásek, 2004), and Mazars equivalent strain (Mazars and Pijaudier-Cabot, 1989). Furthermore, two strain measures can be decomposed to specifically address tension and compression, respectively (Comi, 2001; He et al., 2015).
Some careful treatments are required when applying integral-type nonlocal damage models. Currently, there is no consensus on the appropriate adjustment of averaging near the physical boundaries of a body. A commonly adopted solution involves modifying and normalizing the weight function, as shown in equation (7), to comply with equation (8). However, this arbitrary treatment results in the asymmetry of the weight function, that is,
More critical numerical defects include incorrect damage initiation and improper damage propagation behaviors (Krayani et al., 2009; Pijaudier-Cabot and Dufour, 2010; Simone et al., 2004), which are non-physcial. Notably, the development of a spurious damage zone during the final stage of softening prevents the formulation of a macroscopic discontinuous crack. This issue arises from the unexpected influence of highly damaged zones on their surrounding undamaged area. Moreover, non-physical interactions between material points across damaged bands represent another drawback of this regularization technique.
Another significant drawback concerns computational costs. The numerical implementation of the nonlocal integral formulation often requires a global averaging procedure. A frequently employed approach is the traversal algorithm whose time complexity is
To mitigate the computational challenge, Jirásek (2007b) proposed evaluating weight coefficients once during the initial computation and storing them for subsequent use. However, this approach neglects potential changes in the interaction domain due to structural deformations. Other studies (Summersgill et al., 2017b; Tang et al., 2021) have proposed limiting nonlocal interactions to a circular or spherical radius. While this method reduces the computational domain, the radius selection significantly impacts computational costs, and the process of identifying nonlocal neighbors by evaluating pairwise distances between Gaussian points (GPs) remains a bottleneck. A more efficient approach based on the quadtree (in two-dimensional (2D)) or octree (in three-dimensional (3D)) algorithm was suggested by Jirásek (2004) and later successfully implemented by Lu et al. (2022, 2024). This method reduces the time complexity to
Gradient nonlocal model
Instead of addressing spatial interactions through integrals, the gradient-type nonlocal model integrates the gradients of internal variables into the constitutive relations (Bažant, 1984; Lasry and Belytschko, 1988; Schreyer and Chen, 1986). This approach was first introduced in the domain of damage mechanics by Peerlings et al. (1996). A gradient theory emerges from the nonlocal formulation given in equation (6) by employing a Taylor series expansion to approximate the local quantity as follows:

Substituting equation (14) into equation (6) yields the differential form of the nonlocal quantity:


From a mathematical perspective, the explicit gradient model, which incorporates only the local quantity and its second-order derivatives, remains inherently local. This model retains its local character unless the truncation of higher-order terms in equation (15) is avoided (Peerlings et al., 2001). Furthermore, the numerical implementation of this model within an FE framework poses challenges due to the requirement for


To solve the Helmholtz-type differential equation presented in equation (18), a homogeneous Neumann boundary condition is imposed on the nonlocal quantity across the entire physical surface:

In contrast to equation (16), the derivatives of the nonlocal variable in equation (18) include an infinite series of higher-order derivatives of the local quantity implicitly (Peerlings et al., 2001). This characteristic signifies that the implicit gradient model is a truly nonlocal model. Additionally, the truncation of higher-order terms in the implicit gradient model exerts a subtle influence on its performance (Askes et al., 2000). Moreover, studies by Peerlings et al. (2001) and Simone (2007) reveal that the implicit gradient model is equivalent to the integral model when the Green-type weight function is utilized. Performance comparisons in Askes et al. (2000) demonstrate that the implicit gradient and integral models possess similar regularization capabilities, with both significantly outperforming the explicit gradient model.
Numerical challenges similar to those encountered in integral nonlocal models also require careful consideration in gradient nonlocal models. First, the boundary condition as defined in equation (19) requires the normal component of the gradient of the nonlocal variable to vanish at the boundary. This constraint causes nonlocal interactions near an axis of symmetry to mirror those near the physical boundary of the solid (Krayani et al., 2009).
Additionally, stress oscillation in the case of low-order elements within gradient models has been reported in Simone et al. (2003). Notably, this oscillation intensifies with mesh refinement, indicating the significance of employing integral nonlocal smoothing techniques in certain scenarios (Negi and Kumar, 2019; Nguyen et al., 2018).
Furthermore, similar numerical deficiencies observed in integral nonlocal models—namely, incorrect damage initiation, spurious damage distribution, and stress-locking effects—are also present in gradient nonlocal models (Geers et al., 1998; Simone et al., 2004; Xue et al., 2024).
Fracture energy regularization
As discussed in the previous section, equation (4) admits an infinite number of solutions, among which strain softening localizes in specific regions while the remainder of the material undergoes unloading. Particularly, some solutions exhibit damage growth localized within an interval of length
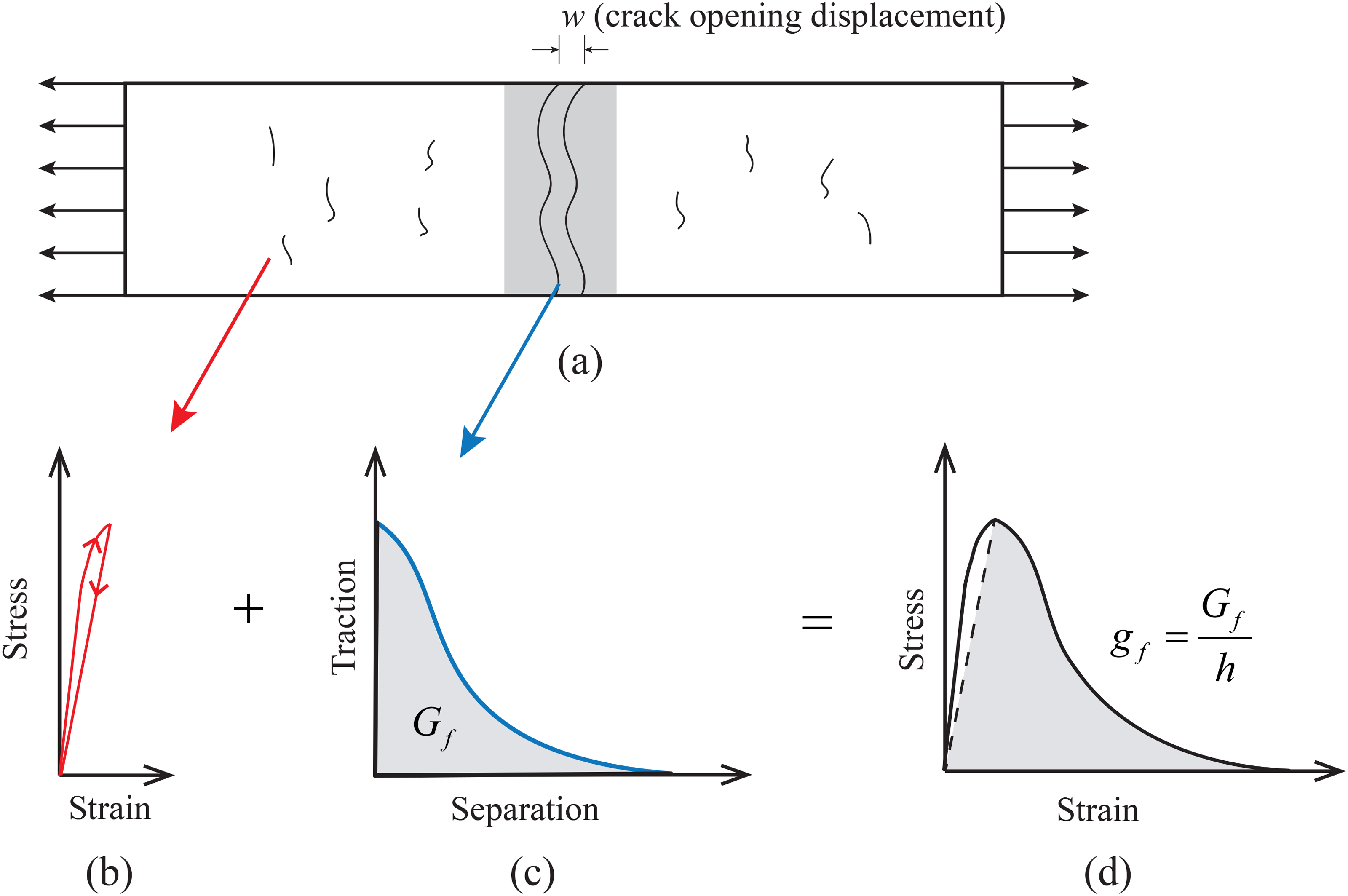
To prevent the issue of diminishing energy dissipation with infinitesimally small element sizes, a fracture energy regularization technique based on the crack band model (Bažant and Oh, 1983; Comi and Perego, 2001) is often employed for practical engineering computations. This technique combines the cohesive crack model and classical continuum mechanics (Kurumatani et al., 2016; Xu and Waas, 2016). The fundamental concept involves adjusting the softening branch of the stress–strain curve relative to the crack bandwidth to ensure consistent energy dissipation per unit area across varying element sizes. In other words, the stress–strain relationship at each material point is no longer a direct representation of material properties but varies according to mesh size. As a result, this approach ensures that global load-displacement outcomes and fracture energy are matched to experimental data.
The adjustment of softening branches is illustrated in Figure 5, which shows the derivation of an effective continuum stress–strain law from the traction–separation law of a crack. Within the cohesive crack model framework (Hillerborg et al., 1976), the fracture energy

Damage zone and fracture energy regularization (He et al., 2019).
The crack band approach assumes that during the failure process, a damage zone of limited width undergoes a softening period, while the remaining areas experience unloading (Bažant and Oh, 1983). Supposing that a single element accommodates a single crack or localization zone, the COD can be expressed as follows:

In damage models, the cohesive force

As illustrated in Figure 5, the volumetric fracture energy




The fracture energy regularization technique offers significant advantages, notably that the formulation remains inherently local and its implementation is simpler than that of previous nonlocal enhancement formulations. Additionally, the boundary conditions established by this approach are both clear and physically justified, contributing to its robustness. This regularization method has been successfully applied in the development of new damage models (Arruda et al., 2022; Bui and Tran, 2022), enabling the achievement of mesh-size independent results.
However, the definition of the characteristic element length is crucial for the effectiveness of the fracture energy regularization technique. The original definition based on the element area in Bažant and Oh (1983) requires square or cubic element mesh refinement (Comi and Perego, 2001). Without meeting this requirement may result in continued mesh sensitivity. Additionally, constitutive-level snapback may arise either from overly large FEs or insufficiently fractured energy (Bažant, 2002; Bažant and Oh, 1983). Both excessively fine and overly coarse meshes can lead to inaccurate crack distribution. The width of the FPZ is fixed due to the premise of accommodating a single crack per element (Červenka et al., 2018). Moreover, this single-element crack band assumption requires uniform damage distribution across the band (Gorgogianni et al., 2020).
From a mathematical standpoint, the governing equations of the fracture energy regularization approach remain ill-posed, offering only a partial regularization of the problem. The mesh-induced directional bias and corresponding incorrect crack trajectories still exist (Jirásek and Grassl, 2008). Furthermore, damage localization into a zero-thickness layer with finer mesh discretization remains an unresolved challenge (Jirásek and Bauer, 2012).
Viscous regularization
Under dynamic loading conditions, quasi-brittle materials exhibit a pronounced rate-dependent behavior, characterized by a significant increase in dynamic strength at high strain rates. This strain-rate effect can be attributed to both viscous effects and the microscopic influences of mass inertia (Häussler-Combe and Panteki, 2016). In the framework of CDM, this effect leads to the retard of damage evolution at high strain rates. To account for the micro-inertia effects, Häußler-Combe and Kitzig (2009) and Wang et al. (2019) introduced the second time derivative of a nonlocal variable into the gradient model. Furthermore, Davaze et al. (2021), Häussler-Combe and Kühn (2012), Häussler-Combe and Panteki (2016), and Rosenbusch et al. (2024) incorporated an additional damping term, corresponding to the first time derivative of the nonlocal variable, which represents micro-viscosity as discussed in Huynh and Abedi (2025). The strain-rate effect can also be included by the introduction of viscosity terms into the constitutive relationships (Pedersen et al., 2008), which can transform the micro-viscosity effects into the macroscopic scale (Häussler-Combe and Kühn, 2012; Häussler-Combe and Panteki, 2016).
The dynamic effect observed during cracking is expected to be influenced by inertial effects, viscosity, rate effects, and damping, which tend to be neglected in quasi-static loading scenarios. Employing these factors in damage models could enable the prediction of nonlocal effects through damage models, presenting a feasible strategy for regularization. Both real and artificial factors may serve as an expedient substitute for nonlocality.
The simplest approach involves directly employing classical Rayleigh damping, which is proportional to specified stiffness and mass, along with a given damping percentage for each material. However, caution is recommended, since it has been demonstrated (Bažant and Jirásek, 2002; de Borst and Duretz, 2020; Needleman, 1988) that incorporating any rate dependence along with inertial effects into the constitutive relation introduces an internal length scale,

To avoid undesired numerical artifacts, it is advisable to use an artificial value for viscosity, rate dependence, or damping, rather than the material’s actual properties. This approach enables effective regularization that incorporates nonlocal effects without compromising the dynamic response.
Several researchers (Loret and Prevost, 1990; Needleman, 1988; Sluys and de Borst, 1992) have explored utilizing viscosity-based effects as localization limiters. These methods delay damage evolution by introducing a length scale into the damage law (Ladeveze, 1992; Ladevèze et al., 2000). However, as strain rates decrease, viscosity-induced nonlocal effects diminish. Consequently, the effectiveness of viscosity in serving as a stand-in for a nonlocal model is limited to a narrow range of time delays and strain rates, typically not exceeding one order of magnitude (Bažant and Jirásek, 2002).
For an FE with a given characteristic length,

The inclusion of viscosity has been widely applied in visco-plasticity theory (de Borst and Duretz, 2020; Dias da Silva, 2004; Loret and Prevost, 1990) and damage models (Chaboche et al., 2001; Dubé et al., 1996; Faria et al., 1998) for localization problems based on the theory of Perzyna (1966) and Duvaut and Lions (1972). Prezyna and Duvaut–Lions models belong to the overstress theory in which the stress can exceed the rate-independent yield surface, thus not satisfying the consistency condition. Therefore, Wang et al. (1997) introduce a consistency viscoplastic model through a rate-dependent yield surface. Niazi et al. (2013) employed the consistency viscoplastic model to critically evaluate the reason for the existence of this regularization strategy for quasi-static problems.
The simplest method to implement regularization through viscosity for fast damage evolution relies on the Duvaut–Lions model (Duvaut and Lions, 1972), which separates non-viscous and viscous components of plastic strain (

Subsequently, various researchers (Maimí et al., 2007) have adapted this formulation to explicitly account for the effects of viscous damage. The key idea is introducing a time dependence to the evolution of the internal variable responsible for ill-posedness (Faria et al., 1998; Geers et al., 1994; Needleman, 1988). Within this regularization framework for damage models, as shown in Figure 6, a viscous damage variable is established as follows:

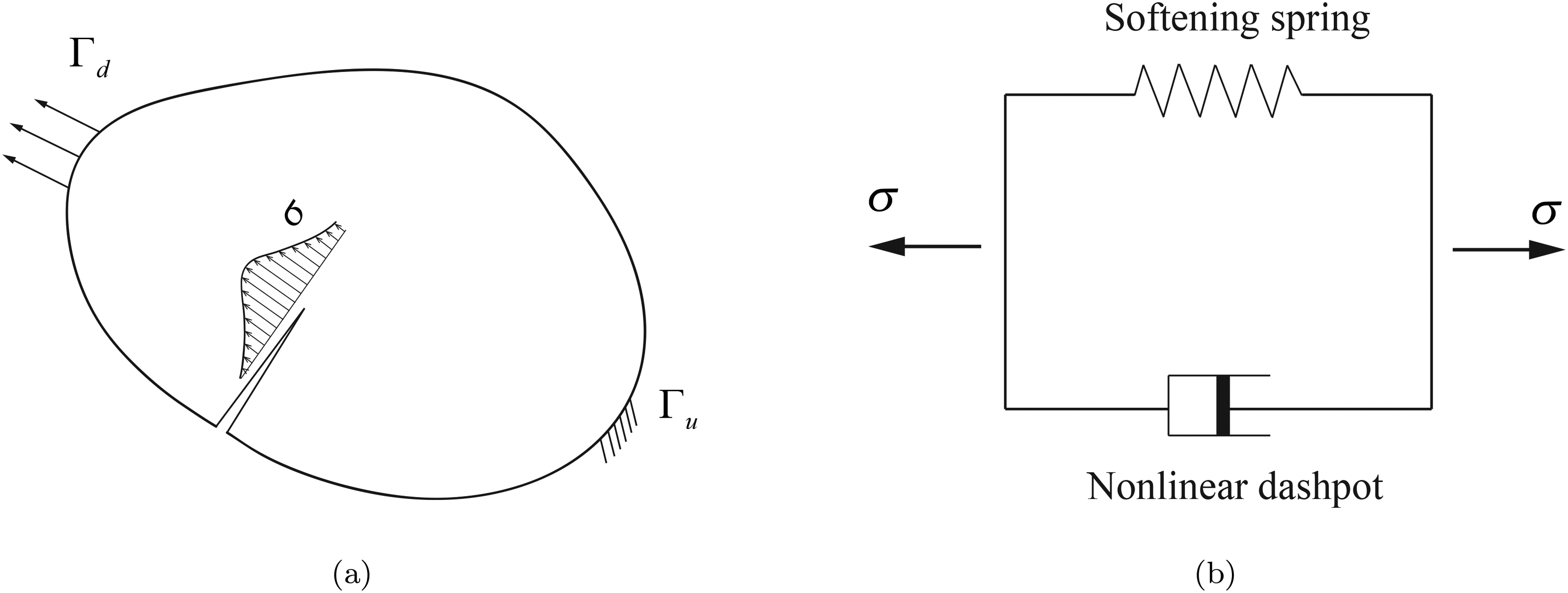
Rate-dependent softening model: (a) fracture domain and (b) rheological model referred to Bažant and Li (1997).
A numerical algorithm needs to be implemented for the solution of equation (27). A straightforward approach involves updating the damage variable using the backward Euler method as follows:

The viscous formulation implicitly incorporates a length scale, presenting the similar regularization effects observed in nonlocal models (Bažant and Jirásek, 2002). This feature helps limit and thus slow down the evolution of damage within specific elements. Additionally, for sufficiently small time increments, this approach ensures that the tangent stiffness matrix of softening materials remains positive and definite, contributing to stable and realistic simulations. Utilizing viscous regularization with a minimal viscosity parameter
However, the selection of the viscosity coefficient
Modifications on nonlocal regularization technique
Nonlocal formulations act as efficient localization limiters and provide an objective description of strain localization (Pijaudier-Cabot and Benallal, 1993). Nonetheless, standard nonlocal models, including both integral-type and gradient-type, have been observed to exhibit several numerical artifacts:
Incorrect failure initiation and propagation: Geers et al. (1998) and Simone et al. (2004) have reported that the shift of maximum nonlocal equivalent strain leads to damage wrongly initiated away from the crack tip in a pre-cracked structure. Moreover, the standard nonlocal models fail to predict the shear damage band. Inability to accurately model marco cracks: The issue of spurious damage distribution, also known as damage widening, characterized by an overly diffused appearance at the end stage of fracture (Giry et al., 2011). This phenomenon, referred to as a spreading effect by Zhang et al. (2021), indicates the unrealistic computational predictions on visible marco cracks. An analytical analysis of gradient-enhanced models in Xue et al. (2024) demonstrates that this damage widening is an inherent defect of these models. Excessive spurious energy dissipation: The commonly employed scaling procedure near the physical boundary of the body may result in excessive energy dissipation (Jirásek et al., 2004), leading to an undesirable boundary effect. This effect results in nonlocal variables near the boundary being lower than those in the central regions. Consequently, this leads to damage erroneously spreading toward the region below the notch tip (Zhang et al., 2021). Incorrect shielding effects: Nonlocal interactions are often inaccurately transmitted across notches or cracks, suggesting that material points on opposing sides of a crack should not influence each other despite their small geometric distance (Peerlings et al., 2001). Both existing non-convex boundaries and newly forming crack surfaces can induce shielding effects and thus require careful consideration in computational analyses (Pijaudier-Cabot and Dufour, 2010). Size effect phenomenon reproduction: The standard nonlocal models are unable to replicate the size effect phenomenon in notched and unnotched concrete beams using a unified set of material parameters (Grégoire et al., 2013; Havlásek et al., 2016; Jirásek et al., 2004).
These nonphysical behaviors observed in conventional nonlocal damage models are largely attributed to the use of a constant interaction domain. Fundamental research by Bažant (1991, 1994) has identified micro-crack interactions as the primary source of nonlocality. Since the size of the active FPZ, where micro-cracking occurs, is evolving with the fracturing process (Jankowski and Styś, 1990; Otsuka and Date, 2000), the nonlocal interaction of the nonlocal continuum models should not remain constant. To address this limitation, the concept of an evolving characteristic length was introduced in Geers et al. (1998). This section presents modifications to standard nonlocal damage models that incorporate varying physical principles, aiming to improve the modeling of the gradual shift from diffuse damage to strain localization. These adaptations seek to bridge CDM and fracture mechanics, enabling a more accurate representation of quasi-brittle material behavior.
Strain-based transient formulation
To mitigate the issue of energy transfer from highly damaged zones to neighboring elastically unloading regions, the introduction of a new nonlocal damage model incorporating a transient internal length was proposed in Geers et al. (1998). This model introduces a novel variable, gradient activity

This strain-based transient formulation effectively maintains local material behavior around highly damaged areas, preventing the expansion of the damage zone. However, this approach requires additional continuity for the gradient activity, introducing an extra degree of freedom per node and thereby increasing computational costs (Geers et al., 1998). To address these challenges, a simplified version of the gradient model was subsequently proposed in Saroukhani et al. (2013):


Pijaudier-Cabot et al. (2004) found that nonlocal effects intensify as damage progresses due to the porosity effect through the superposition theorem (Kachanov, 1987). Based on this understanding, Pijaudier-Cabot et al. (2004) proposed the application of a strain-based evolving internal length,

The above description of evolving internal length is based on the idea that the length scale parameter expands with increasing damage, eventually stabilizing at a predetermined internal length (
Damage-dependent method
Geers et al. (2000) proposed several purely phenomenological nonlocal gradient models, including one that incorporates a damage-based transient internal length. According to Geers et al. (2000), the gradient parameter

Based on the model described by equation (33), Tran et al. (2023) and Tran and Bui (2023) introduced an enhanced gradient-damage model for the analysis of brittle fracture through the application of an energy limiter method:

Nonlocality should not only diminish in the direction normal to the boundary at the boundary itself but also account for the shielding effect, which assumes that points separated by a crack should not interact. Pijaudier-Cabot and Dufour (2010) further addressed this by adjusting the nonlocal interaction distance between points

By considering the evolving length effect proposed by Pijaudier-Cabot et al. (2004) and the boundary effect discussed by Krayani et al. (2009), Chen et al. (2024) introduced a modified characteristic length scale that incorporates two exponential terms. This length scale is expressed as:

Distance-based method
The concept of distance-based averaging involves adjusting the averaging function at a point according to its distance from the nearest boundary, thereby mitigating spurious energy dissipation. This approach was first proposed by Bolander Jr and Hikosaka (1995), where its application was demonstrated by reducing the characteristic length near the notch tip.
To account for the boundary effect, where interaction stresses are expected to vanish at the boundary of a solid, Krayani et al. (2009) introduced a method that involves remapping the coordinate system utilized in the weighting function during the computation of averages near the boundary. The transformation of the coordinate system in 3D is defined as follows:

As reported by Krayani et al. (2009), the scaling of the interaction domain results in it becoming elliptical and eventually degenerating into a straight segment. Similarly, Grassl et al. (2014) modified the averaging function by associating the basic weight function,



The distance-based method has been shown to accurately model energy dissipation near notches (Grassl et al., 2014). Furthermore, this approach effectively predicts the experimental size effect in both unnotched and notched beams using a single set of input parameters (Havlásek et al., 2016). However, the implementation of this method involves determining two additional input parameters, as outlined in equations (39) and (40).
Local-complement method
Methods that preserve the symmetry of nonlocal weight functions near the boundary, such as that outlined in Borino et al. (2003), are referred to as local-complement approaches. This term stems from these methods incorporating additional terms into the standard nonlocal formulation. The key idea is to compensate for the contribution of material lost beyond the physical boundaries by multiplying the local value at the receiving point



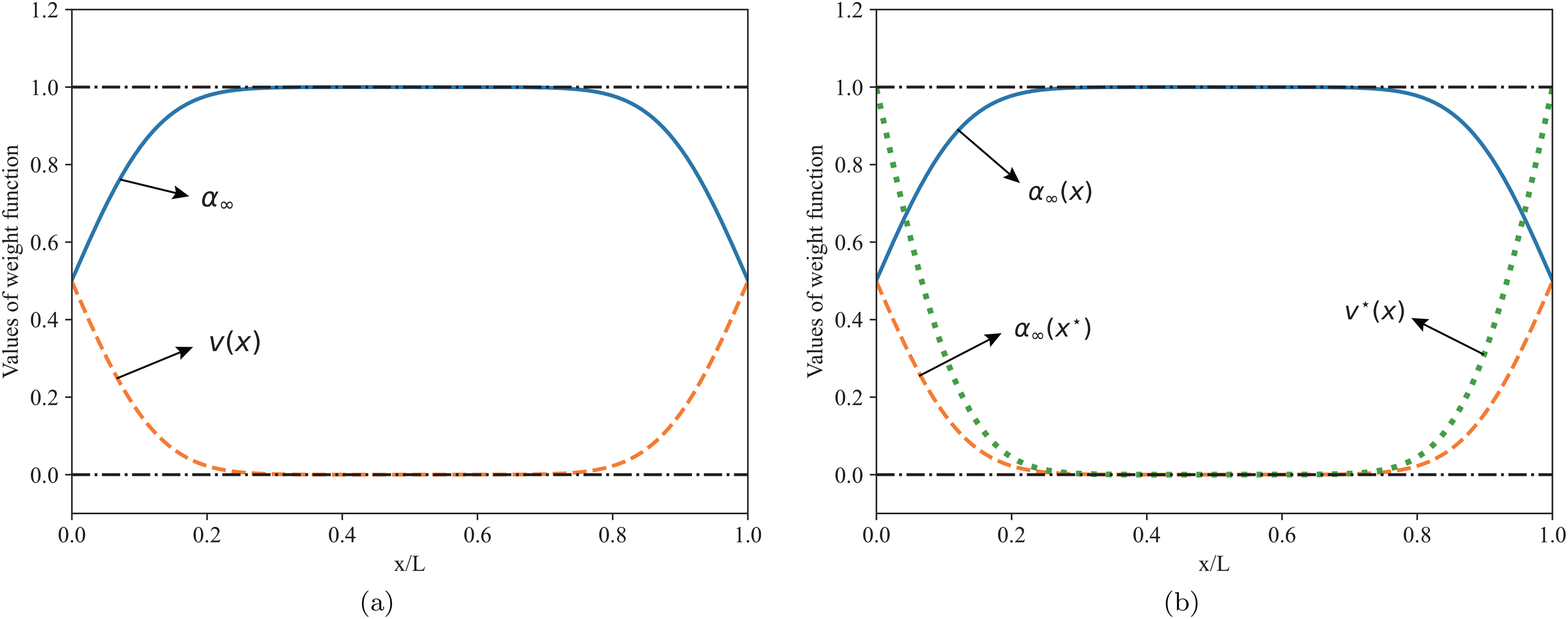
Diagram showing the contribution of different terms of (a) equation (41) and (b) equation (44) for one-dimensional (1D) bar in a uniform state of damage. Referred to Borino et al. (2003) and Krayani et al. (2009).
To mitigate nonlocal effects at the boundary of a solid, a strategic modification of the weight function is required in proximity to the boundary. According to Krayani et al. (2009), this involves conceiving an extension of the solid beyond its physical boundary by introducing a fictitious solid. This fictitious extension is designed to have a state of strain that is symmetric with respect to the actual boundary. Consequently, the computation of the nonlocal variable for a point


Figure 7(b) shows contributions from different terms in equation (44) in a 1D bar with uniform damage. For points located far away from the boundary, the contribution from the symmetric point
Interaction-based method
A novel interaction-based nonlocal formulation, explicitly computing nonlocal interactions through the dilation of circular inclusions centered on each material point, was introduced in Rojas-Solano et al. (2013) and Pijaudier-Cabot and Grégoire (2014). Within the integral formulation framework, the basic weight function in equation (7) is defined as follows:

To address both boundary and shielding effects, it was proposed that the size of the inclusions should decrease as a function of their distance to the boundary and in relation to the damage level. This approach was suggested by Rojas-Solano et al. (2013) as follows:

Stress-based formulation
Bažant (1994) introduced an integral nonlocal model characterized by an anisotropic interaction kernel with a constant length scale, where the principal stress directions determine the shape of the nonlocal averaging domain. This concept was further advanced by Giry et al. (2011), where a transient length scale is incorporated to enable the nonlocal interaction to diminish as the principal stress perpendicular to the crack decreases. According to Giry et al. (2011), the nonlocality is based on the source point


The internal length


The intensity and shape of the nonlocal interaction domain are governed by the stress state, allowing nonlocal interactions to be automatically canceled in regions where principal stress diminishes. Consequently, the influence of the boundary on a specific material point is implicitly perceived by the stress state of the source point. An illustration of this principle is provided in Figure 8(a), which depicts the elliptical influence exerted by the point located at
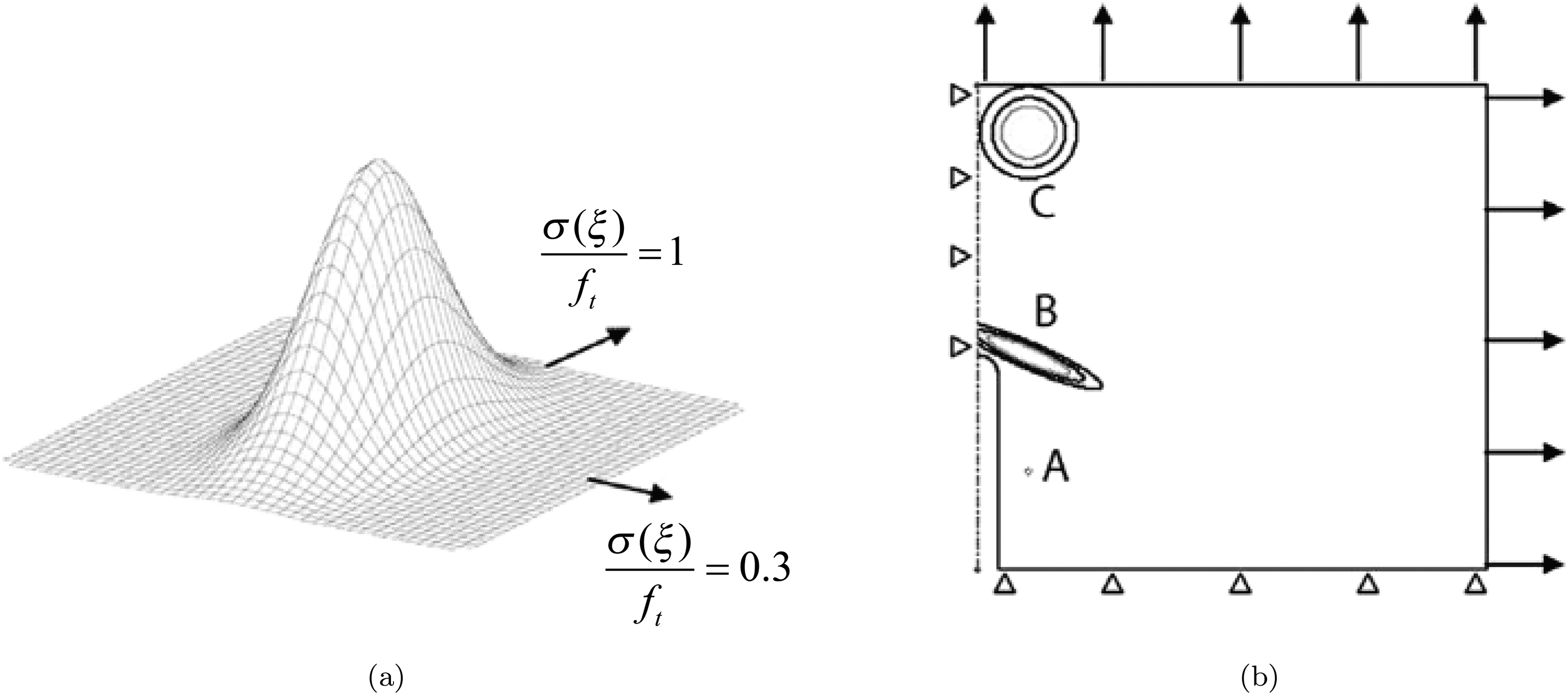
Stress-based nonlocal model proposed in Giry et al. (2011): (a) influence of a point and (b) isovalues of the influence of various points in the specimen.
While the stress-based model effectively corrects damage initiation and reduces artificial damage spreading, it exhibits some mesh dependency due to the length scale parameters diminishing as principal stresses approach zero. To address the challenge posed by zero stress in certain directions, a minimum value for
The principal stress-based model was further developed into a gradient-enhanced variant by Bongers (2011), where the nonlocal interaction domain at the receiver point


Furthermore, Thai et al. (2016) developed a higher-order gradient-enhanced model within the stress-based framework of Bongers (2011). This model was specifically designed to mitigate the truncation effects associated with higher-order gradient terms, thereby improving the accuracy and stability of the formulation.
Nguyen et al. (2018) highlighted that equation (53) does not effectively prevent spurious damage growth due to the incorrect calculation of the nonlocal equivalent strain. To address this issue, Nguyen et al. (2018) proposed a modified diffusive interaction domain incorporating the local equivalent strain, formulated as follows:

Moreover, Nguyen et al. (2018) reformulated the implicit gradient-enhanced model described in equation (18) in terms of the principal coordinates


Meanwhile, Vandoren and Simone (2018) introduced a general format within a Cartesian coordinate system, where the anisotropic gradient matrix

The anisotropic gradient presented in equation (57) does not differentiate between compressive and tensile stresses. To address this limitation, Vandoren and Simone (2018) also proposed a modified formulation:

The modified interaction domain defined by equation (58) expands with increasing deformation in intact material. However, it diminishes with deformation after damage initiation, an observation that aligns with the description provided in equation (54). A small modification was made to equation (58) by Lale et al. (2023) to accelerate the decrease of nonlocal interactions in the direction perpendicular to the maximum stress.
The stress-based approach, while not explicitly accounting for boundary influences, effectively “feels” them through variations in the stress field. In such models, an anisotropic interaction kernel is utilized to control both the intensity and the geometry of the nonlocal interaction domain. Given that this kernel functions as a stress-dependent tensor, nonlocal interactions are automatically nullified in areas experiencing a decrease in stress values.
Localizing gradient damage model
Based on the generalized micromorphic theory as detailed by Forest (2009), a thermodynamically consistent localizing gradient damage model was initially introduced by Desmorat and Gatuingt (2007b) and Poh and Sun (2017). This model incorporates a micro-continuum at each macroscopic point within the domain to characterize the microscopic deformation. According to Poh and Sun (2017), the free energy density function within this framework is expressed as follows:

In equation (59), the first term corresponds to the conventional continuum damage model, in which

The governing equations of the localizing gradient model consist of the following equilibrium equation (without body force) and microforce balance equation:






In the framework of the localizing gradient model, a “pseudo-crack” can be described as the damage variable approaches unity, indicating a natural damage-to-fracture transition. This feature enables the model to effectively circumvent the formation of spurious damage zones during the final stages of the softening process (Huang et al., 2022; Sarkar et al., 2020; Wang et al., 2022; Zhang et al., 2021). Additionally, its adaptability has been validated through implementation in commercial FE software (Sarkar et al., 2022, 2019; Zhang et al., 2022). For instance, user subroutines for implementing both conventional and localizing gradient-enhanced models in ABAQUS are made available in Sarkar et al. (2019) and Zhang et al. (2022), while supplemental material for gradient model implementation in COMSOL is provided in Sarkar et al. (2022). Beyond capturing tensile fracture phenomena, the model also accurately reflects compressive behavior (Wang et al., 2023) and mixed failure modes (Shedbale et al., 2021) with designed techniques.
However, Negi and Kumar (2019) observed a minor deviation in the maximum damage localization from the crack tip with the original localizing model introduced by Poh and Sun (2017), which utilized an assumption of an isotropic interaction function domain. To address this, an anisotropic gradient tensor, inspired by the stress-based approach in Vandoren and Simone (2018), was incorporated into equation (63) by Negi and Kumar (2019). This tensor adjusts the orientation and size of the interaction domain based on the principal stress direction and the damage state at specific material points, ensuring that maximum damage values occur directly in front of the crack tip during the initial loading stages. Furthermore, Negi et al. (2020) refined the model by substituting the micromorphic equivalent strain with the micromorphic strain tensor to more accurately represent nonlocal interactions, owing to its immunity to oscillation. This enhancement avoids the use of higher-order elements or separate smoothing procedures previously adopted by Negi and Kumar (2019). Moreover, Negi et al. (2020) highlighted that the generalized anisotropic gradient-enhanced model described in equation (55) can be derived from the micromorphic framework, with equation (63) representing a special case of equation (55) under the assumption of an isotropic interaction domain. More applications of the modified localizing gradient model can be found in Negi et al. (2021, 2022).
Eikonal nonlocal formulation
To account for the influence of cracks and damaged zones between points, Desmorat and Gatuingt (2007a, 2007b) introduced a new nonlocal formulation that retains the integral framework of nonlocal theories. Instead of utilizing the classical distance metric

The principle of this methodology is that the wave celerity,


By considering the relation

The “dynamic” distance between two points in equation (67) escalates toward infinity as damage approaches unity, resulting in the vanish of all interactions. This effectively addresses the issue of incorrect interactions across highly damaged zones in standard nonlocal approaches. Desmorat and Gatuingt (2007a, 2007b) illustrated that real cracks and highly damaged zones exhibit equivalence in 1D simulations within the internal time nonlocal framework. However, this model requires the computation of the propagation time
A novel eikonal nonlocal (ENL) formulation, inspired by the concept of internal time, was introduced by Desmorat et al. (2015). In this formulation, the traditional concept of information propagation time is innovatively replaced with the effective distance between two points. Desmorat et al. (2015) define this effective distance as the solution to an eikonal equation in the context of wave propagation with a Wentzel–Kramers–Brillouin approximation. The unified eikonal equation, accommodating both isotropic and anisotropic damage models, is formulated as follows:

Mathematically, the effective interaction distance between material points is determined by solving equation (68). The physical interpretation of the eikonal function is a continuous shortest-path problem. From the perspective of differential geometry, multiplying the information time by the wave velocity

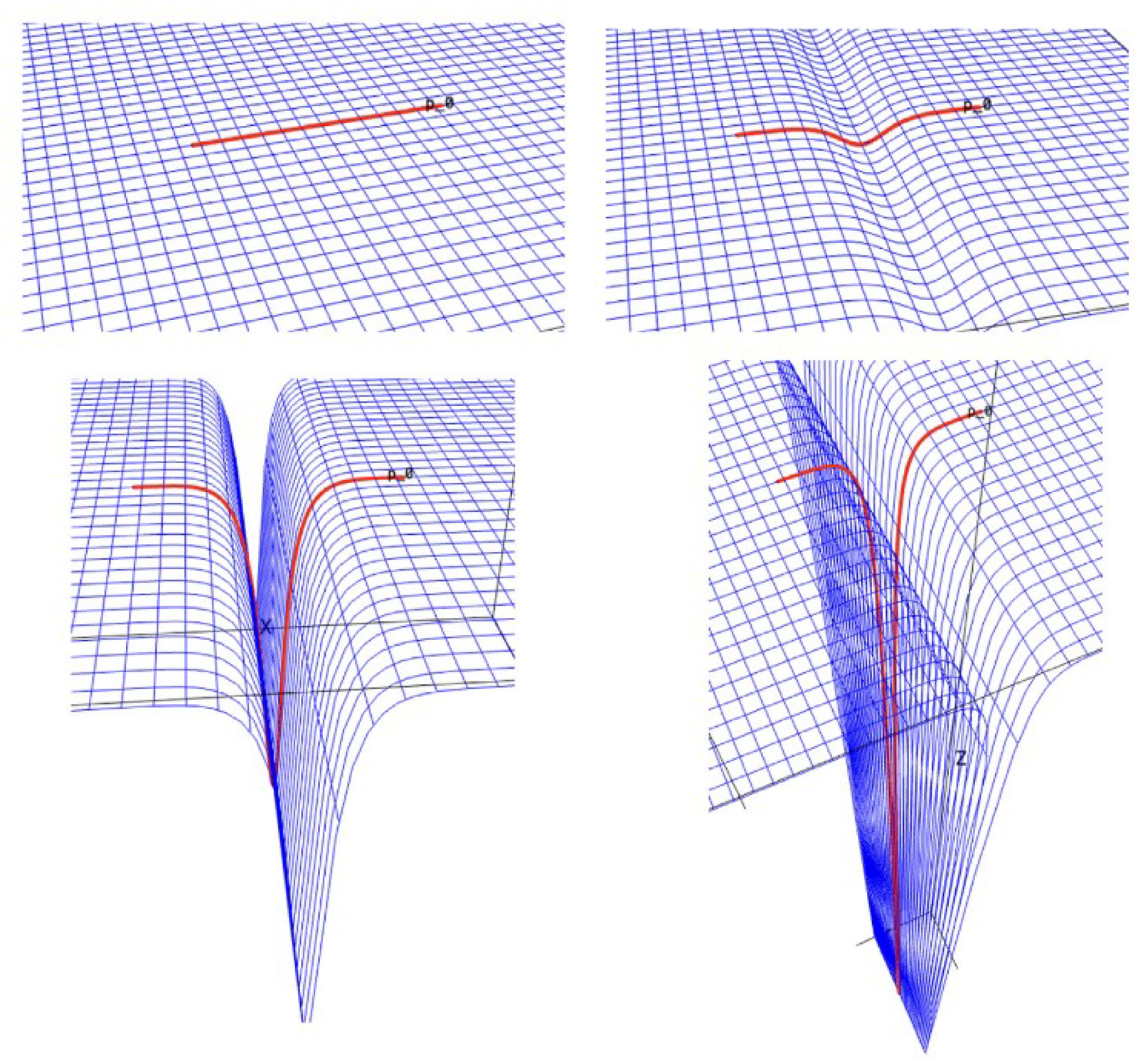
The interaction distance between material points on a Riemannian space with a curvature caused by damage (Nogueira et al., 2024).
Both the eikonal equation (equation (68)) and the geodesic equation (equation (69)) determine the effective distance
With the effective distances determined, the resultant nonlocal integral formulation is expressed as follows:
Eikonal models are particularly effective for addressing newly created boundaries, as they inherently ensure that the effective interaction distance between highly damaged elements and their neighbors tends toward infinity, thereby stopping nonlocal interactions. This feature enables straightforward numerical integrations in 1D cases, as demonstrated in Desmorat et al. (2015), Jirásek and Desmorat (2019), and Thierry et al. (2020). Furthermore, Rastiello et al. (2018) applied the fast marching method to numerically solve the eikonal equation (equation (68)) to obtain effective interaction distances in 2D cases.
Moreover, Desmorat et al. (2015) introduced a gradient-enhanced version of the ENL model, which leads to the modified Helmholtz problem:

The gradient version of the ENL model was first evaluated by Nogueira et al. (2022) in the context of a 1D spalling test. This study compared the performance of ENL models in both integral and gradient forms, reporting an unexpected diffusion of damage upon localization. This issue was addressed by limiting the damage to a critical value (Geers et al., 1998). Additional applications of the gradient ENL model can be found in Marconi (2022) and Nogueira et al. (2023). Furthermore, Nogueira et al. (2024) derived the eikonal implicit gradient formulation from thermodynamic principles based on a geometric extension of the micromorphic approach (Forest, 2009). This derivation revealed substantial similarities with the previously discussed localizing gradient damage model.
While the eikonal nonlocal damage model outperforms standard nonlocal damage models in simulating realistic crack paths, it also tends to produce load-displacement diagrams that feature pronounced snapbacks and overly brittle responses, diverging from experimental observations. This discrepancy stems from the increasing tendency of the model toward local behavior as damage levels rise. To mitigate this side effect, it is suggested to either explore alternative constitutive models, as recommended in Jirásek and Desmorat (2019) or to refine the calibration of model parameters, a strategy suggested in Wang et al. (2023).
Over-nonlocal formulation
The over-nonlocal model initially conceptualized for nonlocal plasticity by Strömberg and Ristinmaa (1996) and Vermeer and Brinkgreve (1994), was later extended to encompass nonlocal damage models integrated with plasticity by Grassl and Jirásek (2006). This method has proven to effectively mitigate spurious localization both in integral nonlocal models (Di Luzio and Bažant, 2005; Grassl and Jirásek, 2006; Mohamad-Hussein and Shao, 2007) and gradient models (Al-Rub and Voyiadjis, 2009; Poh and Swaddiwudhipong, 2009a, 2009b).
The fundamental principle of the over-nonlocal approach is adopting a weighted average of local and nonlocal variables to characterize the damage process. The formulation of the over-nonlocal approach is described as follows:

The previous study in Lu et al. (2009), concerning simple softening plastic models, confirmed that the localization zone is finite only if
In fact, equation (72) is similar to the formulation from a local-complement method, as both approaches simultaneously account for local and nonlocal variables. Bui (2010) and Nguyen (2011) have applied equation (72) to regularize pure damage models, which is termed as a mixed local and nonlocal formulation. Notably, the parameter
Crack bandwidth estimation in fracture energy regularization
Determining the crack bandwidth or characteristic element length is essential in fracture energy regularization techniques to maintain the objectivity of energy dissipation. In principle, this measurement should reflect the evolving width of the FPZ throughout the fracture process (Comi and Perego, 2001). Methods that rely solely on the constant calculation of element area or volume hence fall short (Mosalam and Paulino, 1997). This recognition has led to a broader approach, applicable to elements of any shape, where the effective characteristic element length is measured in a direction normal to the local crack plane (Bažant and Planas, 2019; Comi and Perego, 2001). A straightforward estimation method involves aligning this measurement with the principal strain direction, which should be perpendicular to the crack band.
According to Jirásek and Bauer (2012) and Rots et al. (1988), the characteristic element length (
Oliver’s method
Oliver (1989) introduced two methods for estimating the crack bandwidth, specifically designed to address the challenges posed by irregular meshes. These methods have been extensively reviewed by Jirásek and Bauer (2012). The first approach employs an auxiliary function

Oliver’s first method geometrically represents the distance measured between the boundary edges of an element, oriented in the normal direction to the crack. Importantly, this method computes the crack bandwidth individually for each Gauss point. To enhance this process, Jirásek and Bauer (2012) proposed a modification that a singular unit vector
The second method from Oliver (1989) was based on the concept of equivalent crack length. This length is defined as the distance between projections of the midpoints of the two-element edges intersected by the crack. Consequently, the crack bandwidth is determined by dividing the element area by the equivalent crack length. The expression for Oliver’s second method is expressed as follows:

Jirásek and Bauer (2012) provided a thorough comparison of Oliver’s methods, highlighting their capacity to account for element shape, size, and crack direction. However, one challenge identified is that the estimated crack bandwidth may become infinite under certain circumstances (Jirásek and Bauer, 2012). Despite their comprehensive approach to incorporating key geometric and crack orientation factors, it is important to note that Oliver’s methods are limited to 2D problems.
Govindjee’s method
Govindjee et al. (1995) found that applying Oliver’s method to 3D problems with common brick elements leads to a discontinuous length function. This issue arises from the discontinuous nature of crack indicator

Govindjee’s method geometrically determines the crack bandwidth as the maximum distance between the corner nodes, projected onto the direction normal to the crack. This approach accounts for the element shape, element dimensions, and crack direction. It aligns with the projection method introduced in Cervenka et al. (1995), which also expresses these geometric explanations. For addressing compression softening, a similar concept of a crushing band was proposed in Cervenka and Cervenka (2010) and Červenka et al. (2018), relying on the projection of each FE toward the direction of minimal compressive stress. To mitigate the bias introduced by mesh orientation, an orientation factor ranging from 1 to 1.5 was suggested in Cervenka et al. (1995) and Červenka et al. (2018). However, Jirásek and Bauer (2012) pointed out there is no need for this additional orientation factor.
Slobbe’s method
Oliver’s and Govindjee’s methods are only applicable to linear FEs and standard Gauss quadrature. Jirásek and Bauer (2012) identified a potential issue where strain softening might not fully localize across an entire element when quadratic interpolation functions are used in 1D elements, potentially leading to an overestimated crack bandwidth. Consequently, the use of higher-order elements was discouraged. This partial localization issue is attributed to the numerical integration scheme and interpolation function, a phenomenon that was also reported by Slobbe et al. (2013) in the context of 2D elements. To address these challenges in higher-order elements and incorporate mesh orientation considerations, Slobbe et al. (2013) introduced two parameters to refine Govindjee’s method:


This method comprehensively accounts for the integration scheme and element order, in addition to the element dimension, shape, and crack orientation. However, it is important to note that the validation of this method was confined to 2D problems (Slobbe et al., 2013).
He’s method
To achieve results that are more independent of mesh size and account for mesh irregularities, He et al. (2019) introduced two separate crack bandwidths for tensile and compressive behaviors based on Govindjee’s method. Geometrically, these bandwidths are determined by projecting the midpoint of element edges in directions normal and tangential to the crack, respectively. The mathematical expressions for these calculations are as follows:

The validation conducted by He et al. (2019) demonstrates that He’s method effectively achieves objective and mesh size-independent outcomes. It is particularly adept at solving problems characterized by irregular meshes and arbitrary crack orientations, due to its comprehensive consideration of element shape, size, and orientation with respect to crack directions and spatial positions. Despite its proven efficacy in 2D problems, it is important to note that the method was specifically developed for 2D linear elements. Consequently, its applicability to 3D problems and higher-order elements has yet to be validated.
Method for higher-order elements
In recent years, higher-order beam theories based on Carrera unified formulation (CUF) have arisen significant interests in various engineering fields (Arruda et al., 2018; Kaleel et al., 2017; Shen et al., 2022; Trombini et al., 2024). Within the CUF framework, the 3D displacement field of a beam model can be derived through various cross-sectional expansions, which is formulated as equation (80). This approach enables beam models to achieve 3D accuracy while preserving computational efficiency .
Another significant advantage of CUF-based beam models is that there is no need for ad hoc assumptions commonly found in beam theory. Classical beam theories, such as Euler–Bernoulli and Timoshenko, can be integrated as special cases within the CUF framework. This integration enhances a comprehensive approach to beam modeling, where FE approximation can be utilized to derive solutions:
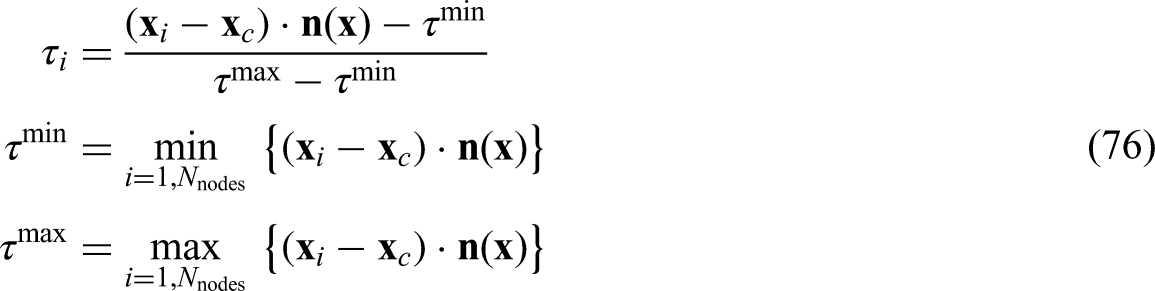
Equation (81) demonstrates that the choice of expansion functions and the order of beam elements in CUF-based beam models are independent variables, serving as configurable inputs. As depicted in Figure 10, a quadratic finite beam element can be expanded using quadratic Lagrange-like polynomials to approximate the 3D displacement field. This approximation process incorporates the beam shape function
Illustration of a quadratic Carrera unified formulation (CUF)-based finite beam element with Lagrange expansion function.
The utilization of CUF-based beam models with FE solutions for simulating strain-softening behavior in quasi-brittle materials inherently faces the challenge of mesh size dependency. To address this issue with fracture energy regularization, especially in the context of higher-order elements, various methods have been proposed to estimate crack bandwidths accurately. The concept of cubic root of taking the cubic root of a volume was introduced in Kaleel et al. (2018) and Nagaraj et al. (2020). This approach is inspired by Bažant and Oh (1983), where the method of utilizing the square root of an element area was suggested. The mathematical expression for this volume-based estimation is presented as follows:
Building on the same concept of utilizing the cubic root of a volume, Shen et al. (2023a) proposed a modification for beam FEs that incorporate Lagrange expansions within the CUF:

Figure 11 illustrates the concept of equation (83), based on the example from Figure 10. In this illustration, the total volume is divided into small volumes according to the order of beam element and expansion function. Each of these smaller volumes may contain one or more GPs. The characteristic element length for GPs is computed by the cubic root of the volume containing the target GPs. A key condition stated in equation (84) is that the geometry of the volume containing the target GP should approximate a cubic form. While equations (82) and (83) are based on the same concept, equation (82) tends to yield a higher estimation of the characteristic element length in comparison to equation (83).
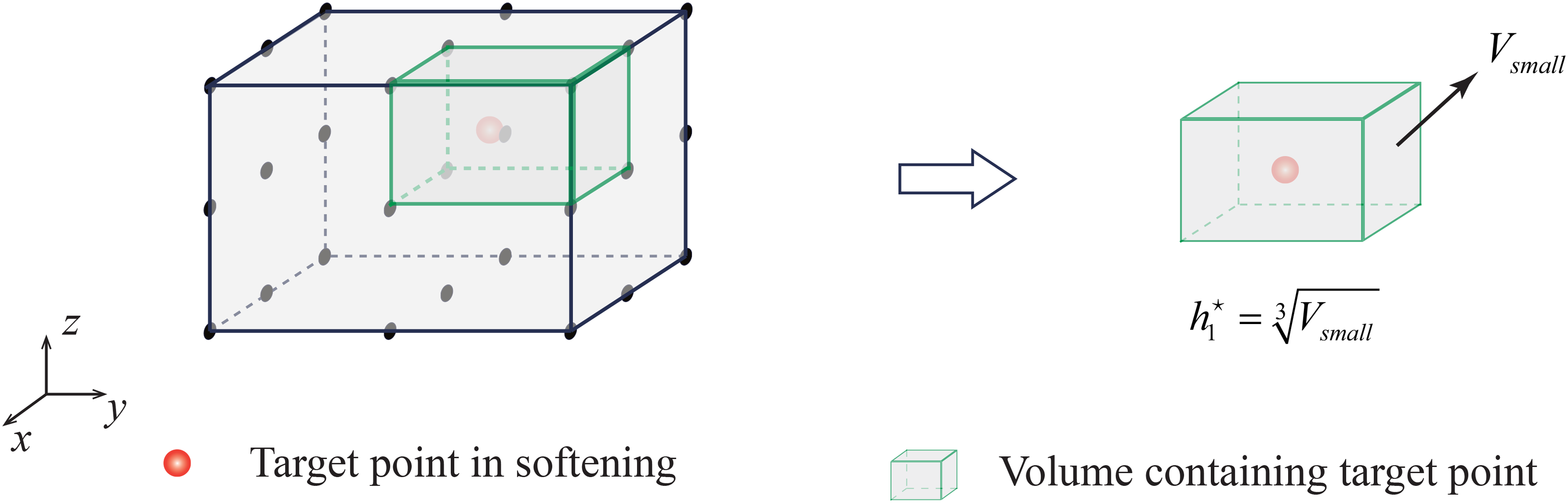
Illustration of calculation for
The constraints imposed by equation (84) often result in overly dense mesh requirements, diminishing the inherent efficiency and flexibility of CUF-based models. Moreover, the crack bandwidth may evolve through the softening period, requiring a more flexible approach. To address this, a novel method inspired by earlier projection techniques was introduced in Shen et al. (2023b). This approach enables the determination of an appropriate crack bandwidth that accounts for mesh characteristics and crack orientation, free from the restriction of equation (84). The formulation of this method, presented in equation (85), similar to the one from He et al. (2019), yet it is expressly adapted for use with higher-order beam elements.
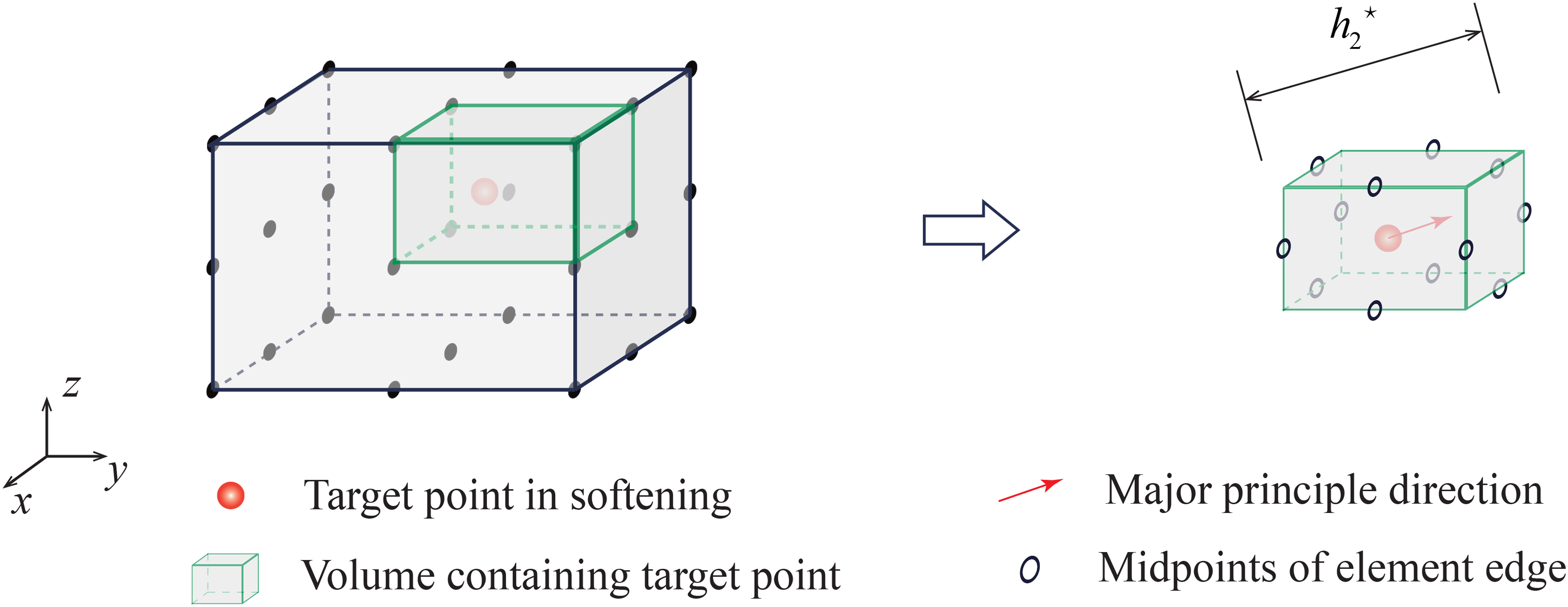
Illustration of calculation for
The observation of a more ductile response in some models can be attributed to the fact that the method in Shen et al. (2023b) tends to underestimate the crack bandwidth when employing certain high-order elements. To mitigate the resulting inappropriate mesh sensitivity associated with these higher-order elements, a strategy similar to those discussed in Jirásek and Bauer (2012) and Slobbe et al. (2013) has been integrated into the projection method in Shen et al. (2024). This approach, designed to enhance accuracy and reduce sensitivity, is detailed as follows:
The geometrical explanation behind equation (86) is depicted in Figure 13, utilizing the same example illustrated in Figure 10. Initially, the projection method is applied, followed by determining the parameter
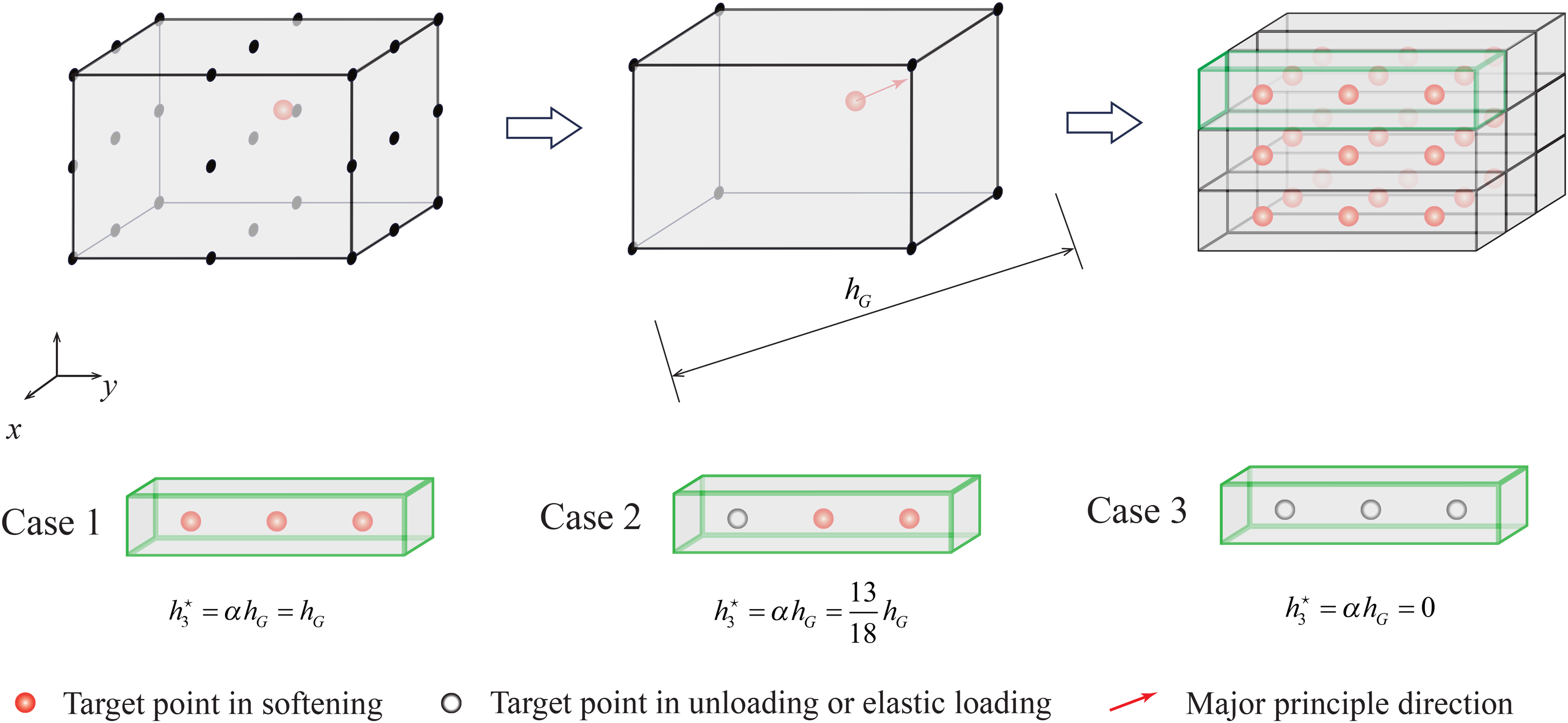
Illustration of calculation for
Comparison of different estimation methods
A comparative analysis of the methods previously discussed for nonsquare quadrilateral elements is illustrated in Figure 14. Figure 14(a) visually compares these methods by projecting the element onto a central point, with superscripts
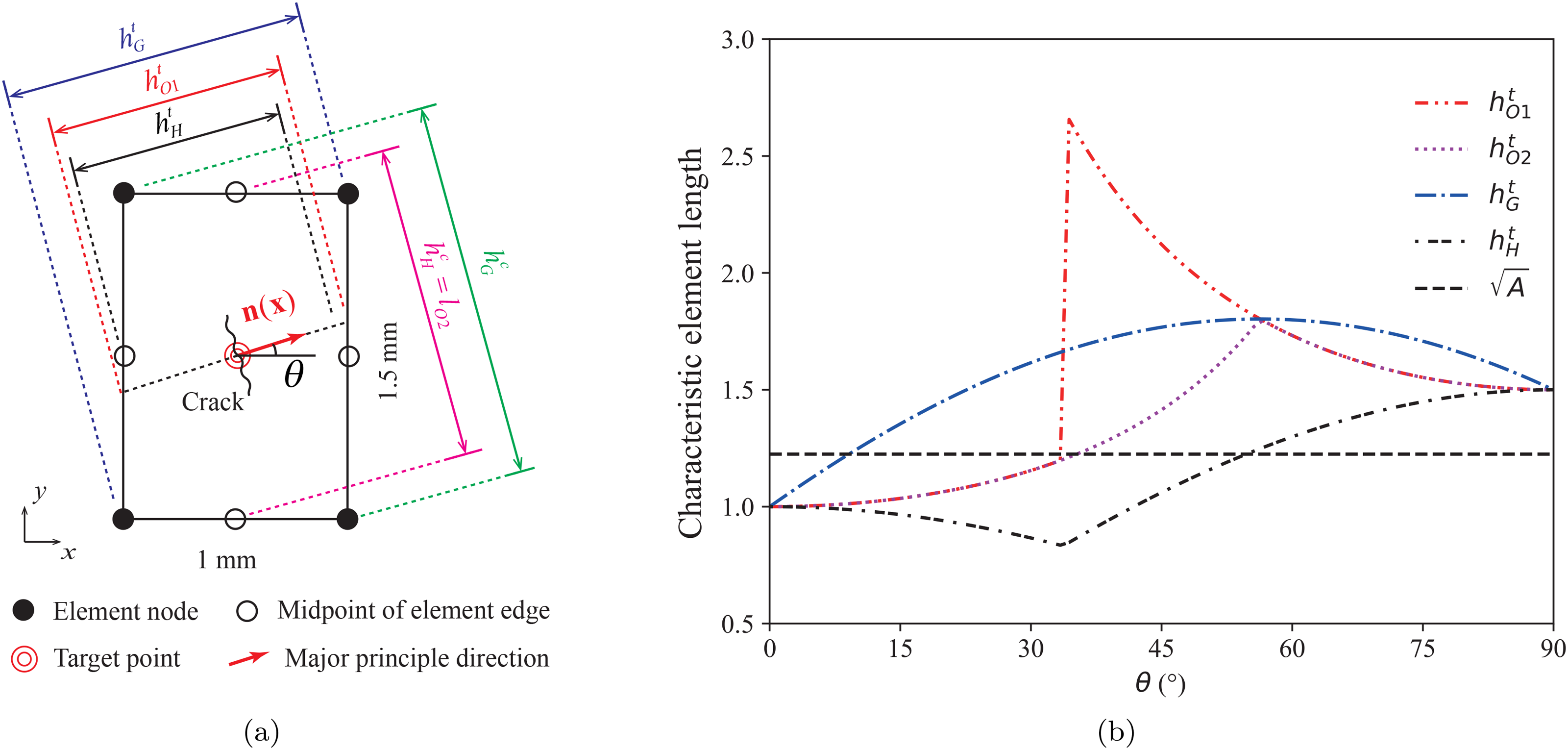
Comparison of each estimation method for a rectangular quadrilateral element with 1 mm width and 1.5 mm height: (a) geometrical meanings of each method and (b) obtained tensile characteristic element length.
Figure 14(b) showcases the estimated lengths of each model across various crack directions. Notably, Oliver’s first method exhibits discontinuity due to a binary crack indicator change when the crack aligns diagonally from the top left to bottom right within the element, whereas the other methods display continuous curves. Oliver’s second method does not consistently yield the same results as his first method. Compared to other projection methods, He’s method generally yields lower estimates.
The comparative analysis of various methods for estimating the characteristic element length in higher-order beam elements is depicted in Figure 15. Specifically, Figure 15(a) illustrates a 3D volume derived from a quadratic beam element utilizing quadratic Lagrange expansion, where the beam element has a length of 2 mm and a square cross-section with 1 mm sides. Among the methods reviewed, only Govindjee’s method is identified as appropriate for 3D applications, with its geometric interpretation depicted in Figure 15(a). Values of
Comparison of each estimation method for a beam element with Lagrange expansion: (a) geometrical meanings of each method and (b) obtained tensile characteristic element length.
Final remarks
The strain softening behavior observed in quasi-brittle materials leads to significant computational challenges in standard CDM, such as the loss of ellipticity and an undesirable mesh dependency. These issues further lead to the snapback behavior and zero fracture energy dissipation. Such critical problems are attributed to the mathematical defect rather than the numerical one. The mesh dependency to the discretization thus occurs for any discretization method, including mesh-free method (Pamin et al., 2003) and boundary element method (Lin et al., 2002; Sladek et al., 2003). Therefore, implementing regularization techniques is urgent to enhance the stability and reliability of numerical models dealing with materials that exhibit softening.
Nonlocal models incorporate an internal material length parameter to prevent the FPZ from concentrating at a singular point or line, maintaining a more realistic spread of damage. Fracture energy regularization adjusts the stress–strain softening curve based on spatial discretization, ensuring the total energy dissipated in numerical models aligns with the actual physical fracture energy of the material. Viscous regularization introduces an artificial viscosity term to the model, implicitly accounting for the rate-dependent behavior of materials. This addition helps to control and decelerate the damage evolution within specific elements. These approaches are crucial for ensuring that mathematical and numerical models accurately capture the energy dissipated in the fracture zone of quasi-brittle materials.
While regularization techniques have significantly mitigated the mesh-dependent response in numerical simulations of quasi-brittle materials, certain numerical defects remain challenging. In light of this, this work reviews recent advancements in regularization techniques, with a particular emphasis on refining the definitions of internal length in nonlocal models and characteristic element length in fracture energy regularization. Such advancements are crucial for accurately modeling the response of quasi-brittle materials, ensuring that simulations closely mirror physical behaviors.
In nonlocal models, adopting an evolving internal length concept has proven to be effective in addressing challenges related to inaccurate damage representation and the distribution of spurious damage. This work acknowledges the complexity of categorizing these approaches. For instance, the evolution of internal length within the eikonal nonlocal formulation and localizing gradient models is related to the damage state, a characteristic that could also align with damage-based models. Identifying the most effective regularization technique is challenging, as the efficacy of each model is influenced by multiple factors. While certain methods may be phenomenologically compelling and effective, establishing a well-defined thermodynamic background is crucial to ensure the thermodynamic consistency of the models.
The determination of characteristic element length in fracture energy regularization is crucial for achieving a mesh-independent global structural response. It involves integrating multiple aspects related to the FE and crack direction. This work presents several estimation methods tailored for CUF-based models, enhancing their regularization capabilities. However, these methods have been developed and validated specifically for higher-order beam elements. Their effectiveness for other types of elements, such as plates, shells, or standard 3D brick elements, may be an area for future exploration.
While the refinement of characteristic element length represents a significant step forward in improving regularization capacity, recent advancements have introduced the smooth crack band model, as proposed by Zhang and Bažant (2023). This innovative approach may offer an alternative way to address the challenges associated with fracture energy regularization in numerical modeling.
Viscous regularization is rarely applied within pure damage models. More commonly, a viscous term is introduced and integrated with other regularization methods to obtain a more stable solution with a faster convergence speed.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research has received funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme (grant agreement no. 850437). The authors are also thankful for the support provided by the research projects 0305/1102/24160 MESTR – Modelação do Comportamento Estrutural a 0302/1102/24163 SEPINOV – Sistemas Estruturais e Produtos Inovadores from LNEC.