
Abstract
Background
Regular training is crucial for student and novice operators conducting artificial insemination to ensure successful cattle reproduction. Standardized repetitions help generate autonomy and self-confidence. It is also essential for proficiency in the technique, assuring consistency and success in the procedure. Training live animals for AI procedures raises ethical concerns and requires a regular supply of animals. Alternatives have been developed, either as manikins or simulators, usually based on Bos taurus genital tracts.
Aims
This work aimed to describe the development process of an artificial insemination simulator for Nelore cattle named “Training Artificial Insemination for Nelore” (TrAI4Nel). This simulator enables the effective training of professionals and reduces the number of animals used for this purpose.
Methods
The TrAI4Nel simulator was developed using 3D modeling and printing techniques that accurately reproduce the anatomical characteristics of the Nelore reproductive tract. Electronic components were incorporated to provide a realistic simulation and allow real-time procedure evaluation.
Results
Throughout the development of this simulator, two main shortcomings have been detected and corrected. Compared with commercially available products, TrAI4Nel incorporates significant innovations. The implemented electronic system provides greater precision in training, simulating the ideal moment for semen deposition, and allowing real-time assessment of the trainee.
Conclusions
This simulator can become a valuable tool in professional training. It allows interactive learning and provides a realistic, affordable experience. It also reduces trainees’ emotional stress and animal injuries, emphasizing ethical aspects and efficiency in training in this area.
Background
The future prospects a scenario in which artificial insemination will continue to grow, potentially increasing the number of inseminations aimed at achieving genetic and productive improvements in herds (Baruselli et al., 2018). This scenario drives into an increased need for qualified inseminators. Training is crucial for achieving greater gains in terms of productivity and profitability. Training in artificial insemination (AI) plays a crucial role in ensuring the success of this procedure in cattle. Thus, it becomes necessary to provide regular training for students and update the professionals and farm staff who perform AI (Azuaga Filho et al., 2023; Norton & Annandale, 2023) to guarantee its reproducibility and effectiveness in executing this technique. The AI training program is essential for acquiring competencies with immediate practical application in the field (Dalton et al., 2021), given that the expertise of inseminators can vary according to the amount of training and practice (Barth, 1993).
Traditionally, hands-on transrectal palpation and artificial insemination in cattle are learned using genital tracts retrieved at abattoirs in the first phase, followed by training in live animals. The procedure in live animals is supervised, step-by-step, by a tutor who ensures the correct semen deposition in the uterus. Repeated practice sessions with experienced instructors’ feedback contribute to building the trainees’ proficiency and confidence. Jaśkowski et al. (2020) strengths that this approach faces ethical and time constraints. On the other hand, simulators like HapticCow and Breed’nBetsy offer a safe space for continuous practice, with immediate feedback and simulation of various scenarios. Although they cannot wholly replace real practice, simulators are valuable tools that prepare students for safer and more efficient animal interactions (Azuaga Filho et al., 2023), contributing to greater confidence and skills among young professionals, leading to better clinical outcomes.
Simulators enact ethical alternatives to traditional methods in all the learning areas of veterinary medicine. Generally, modern learning approaches use cutting-edge technologies like simulators and models to overcome the ethical constraints of using live animals and the difficulty in guaranteeing the elevated number of animals needed for repeated practice across veterinary medicine training (Martinsen & Jukes, 2005). Simulators also allow for repetitive practice and immediate feedback without compromising animal welfare. Martinsen and Jukes (2005) further argue that such choices promote animal life and enhance teaching effectiveness, better preparing students to face challenges.
Particularly concerning the training of reproductive procedures in cattle, simulation is an important training tool because it allows for increased practice before working with live cows, reduces trauma, discomfort, and stress, and decreases the overall welfare burden typically generated during the learning process of the artificial insemination technique (Martinsen & Jukes, 2005; Scalese & Issenberg, 2005). However, it is essential to critically analyze the current artificial insemination simulators. Although they offer significant benefits, such as replacing live animals and reducing contamination risks and injuries, they still have some limitations, which result in their restricted use in training (Azuaga Filho et al., 2023). In this context, innovative simulators such as the “Training Artificial Insemination for Nelore” (TrAI4Nel) assume a crucial role in teaching veterinary medical procedures. TrAI4Nel results from an attempt to address the main challenge of developing simulators for specific large animal subspecies such as zebuine, respecting its anatomical accuracy. Simultaneously, it is an innovative approach, offering an accessible and technically advanced model for the accurate replication of procedures performed on live animals while allowing the trainer to assess the operator’s performance. TrAI4Nel further proposed overcoming technical and financial barriers.
The development of the TrAI4NEL simulator reflects the educators’/researchers’ commitment to pedagogical innovation and animal welfare, the recognition of the added value of improving the learning experience, and their alignment with the ethical guidelines of veterinary practice. Using this simulator allows institutions and educators to enhance the training of future veterinarians and AI technicians using realistic experience while equipping trainees with the knowledge and competence necessary to act confidently and responsibly in bovine reproduction (Braid, 2022).
One concern when developing a simulator for AI training is to be aware of the needs of both students and educators (Azuaga Filho et al., 2023; Bossaert et al., 2009) and to offer innovative approaches based on a broad understanding of the benefits of the simulators, particularly for veterinary education. The identified gaps in simulators aimed at training in bovine AI procedures include, among others, the difficulty in assessing the accuracy of the inseminator during the training of the AI process and the limitations in the realism of the reproductive apparatus and adjacent anatomical structures. Nonetheless, in general, simulators play a vital role in veterinary training (Marcos et al., 2023; Oviedo-Peñata et al., 2020).
TrAI4Nel uses silicone rubber parts and 3D modeling of the Nelore reproductive tract, providing a realistic texture and dimension; the model of the reproductive tract is complemented with electronic components to offer precise feedback of the pipette placement during semen deposition, allowing the assessment of the inseminator’s accuracy and raising the training standards for a more realistic replication of the artificial insemination procedure. This manuscript describes the construction of the TrAI4Nel artificial insemination training simulator. Due to its portability, interactivity, and affordability, the TrAI4Nel simulator is a valuable tool for veterinary education and AI courses, allowing students to practice and refine their skills without compromising animal welfare and allowing trainers to surveil and assess students’ progress in real time.
Material and Methods - the Construction of the TrAI4Nel Simulator
In conceptualizing the TrAI4Nel simulator, it was decided to invest in different elements that would complement each other to create the final product. Rooted in a preliminary brainstorming, researchers and educators identified a geographic need for training technicians working in zebuine AI. Thus, it was decided to include a model of the reproductive tract in the simulator, which was produced using advanced modeling and 3D printing techniques based on precise anatomical data obtained from Nelore females (Azuaga Filho et al., 2024), to include a detailed representation of the uterus, cervix, and ovaries. The idea of incorporating different electronic components that simulate physiological conditions, such as peristaltic movements, to provide a realistic and valuable training experience also resulted from the brainstorming. Additionally, integrating the electronic part of this simulator, including sensors along the genital model, allows the assessment of the insertion of the insemination pipette up to the correct location and contributes to assessing students’ performance. The two components contribute to an advanced simulator that offers a valuable tool for teaching zebuine artificial insemination.
The genital tract model and the electronic components are integrated into an external casing replicating the external appearance of a Nelore breed cow to provide an external anatomical context for training.
Modeling and 3D Printing
Primary modeling of the rigid model parts
The exterior of the simulator and the cow reproductive apparatus were created by the sculptor Jânio Borges. The simulator’s exterior was first sculpted in life-sized clay to resemble a Nelore cow. The sculpture was then covered with fiberglass to produce the mold from which four cow manikins were created (Figure 1(A)). Following the creation of the clay sculptures, a fiberglass mold of the reproductive apparatus was carefully crafted, consisting of seven parts that fit together precisely with screws, ensuring the exact alignment for the manufacturing of silicone replicas of the bovine reproductive system (Figure 1(B)). Illustration of the process leading to the rigid components in the TrAI4Nel simulator. (A) The clay-sculpted mold used for fiberglass modeling. (B) Using a uterus specimen for modeling, with subsequent measurement adjustments, led to the creation of a 7-part detachable fiberglass mold. (C) A view of the equipment’s interior housing and all internal components. (D) External view of a fully operational simulator.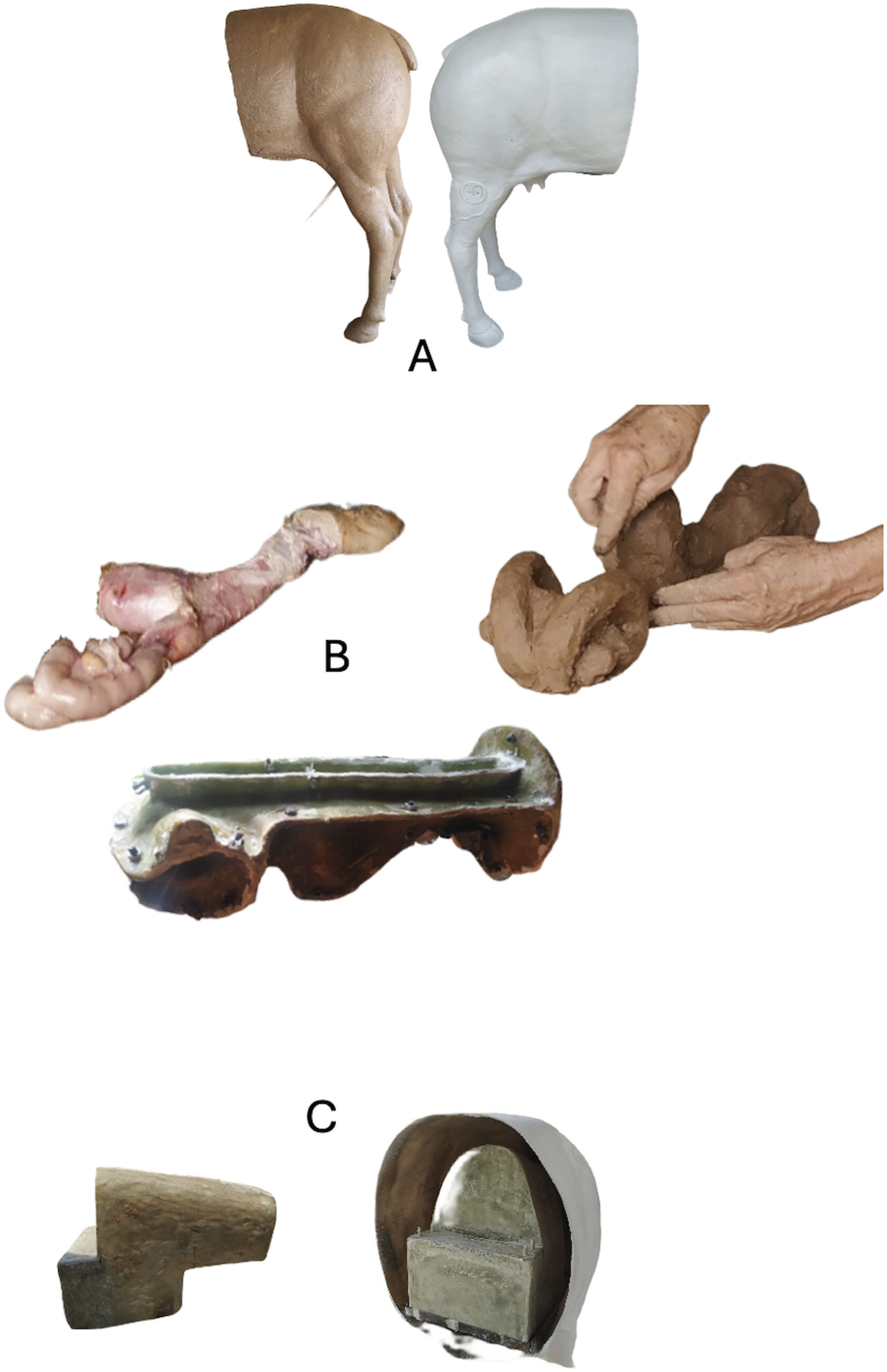
The pelvic space within the fiberglass box (Figure 1(C)) was designed considering the measurements obtained with a pelvimeter produced at Instituto Federal de Educação, Ciência e Tecnologia de Mato Grosso (IFMT; Cáceres, Brazil) for this purpose, using the Nelore cows from the IFMT as a reference for these dimensions. In the production of this mannequin, a fiberglass compartment simulating muscles and fat was produced to replicate the actual pelvic space. This space houses a reproductive apparatus made of synthetic silicone, similar to that used in human prosthetics. The cervix, introduced through the vulva and vagina, is fixed inside the hollow silicone structure of the reproductive apparatus, resulting in a device that not only mimics the actual anatomy but also respects the specific dimensions of the Nelore breed, creating a highly realistic and didactic model for training in artificial insemination (Figure 1(D)). In the modeling, five layers of 450 g/m2 fiberglass were used to provide the necessary strength to the inner part (inner box), while seven layers were employed in making the exterior part of the TrAI4Nel simulator.
Modeling the Nelore cervix prototype
To obtain precise anatomical references for the creation of a three-dimensional model of the cervix to be incorporated into the simulator, 124 Nelore genital tracts from females with a mean age of 4.15 years (SD = 2.40 y; range = 2 to 10.5 y) were collected at the 3M slaughterhouse (Cáceres, Mato Grosso, Brazil), dissected and measured to gather detailed measurements of the reproductive organs of the Nelore females (e.g., the external and internal diameter of the uterus and uterine horn, the external diameter of the cervix, internal diameter of the cervical canal, total length of the cervix, and number of cervical rings, as well as the widths of the cervical rings and interring distance (for details, see (Azuaga Filho et al., 2024)). Based on the collected evidence, the cervix molds were produced by 3D printing for use in the simulator.
Images of the uterine cervix were used to obtain the molds to accurately represent the anatomical structure. Several trials are needed to refine the 3D printing process, integrating computer graphics techniques and 3D modeling. The internal modeling of the cervix was performed using the 3D mesh creation software Autodesk Fusion 360TM (Autodesk, Inc., San Francisco, USA). The mesh developed was subjected to slicing using the program Ultimaker Cura 5.3.0 (Ultimaker, Utrecht, the Netherlands). The 3D model was printed in a Creality Ender_3 Pro 3D printer (Creality 3D Technology Co., Ltd., Shenzhen, China) using fused filament deposition (FDM) technology and a printing volume of 220 mm × 220 mm × 250 mm (Figure 2(A)). The silicone part molds were produced with PLA+ and ABS filaments, with a 1.75 mm diameter, and in various colors. An alcohol-soluble polyvinyl alcohol (PVA) filament, also 1.75 mm in length, was used to print the internal spaces of the cervix (Figure 2(B)). Illustration of the steps involved in cervix production: (A) Printing of ABS molds. (B) Use of soluble filaments for the inner neck. (C) Preparation of the soluble mold. (D) Creation of the inner mold in rigid silicone. (E) Formation of the outer mold using soft silicone. (F) Transverse cut of the segment displaying the inner and outer parts. (G) Presentation of the final product in a soluble material with two layers of silicone.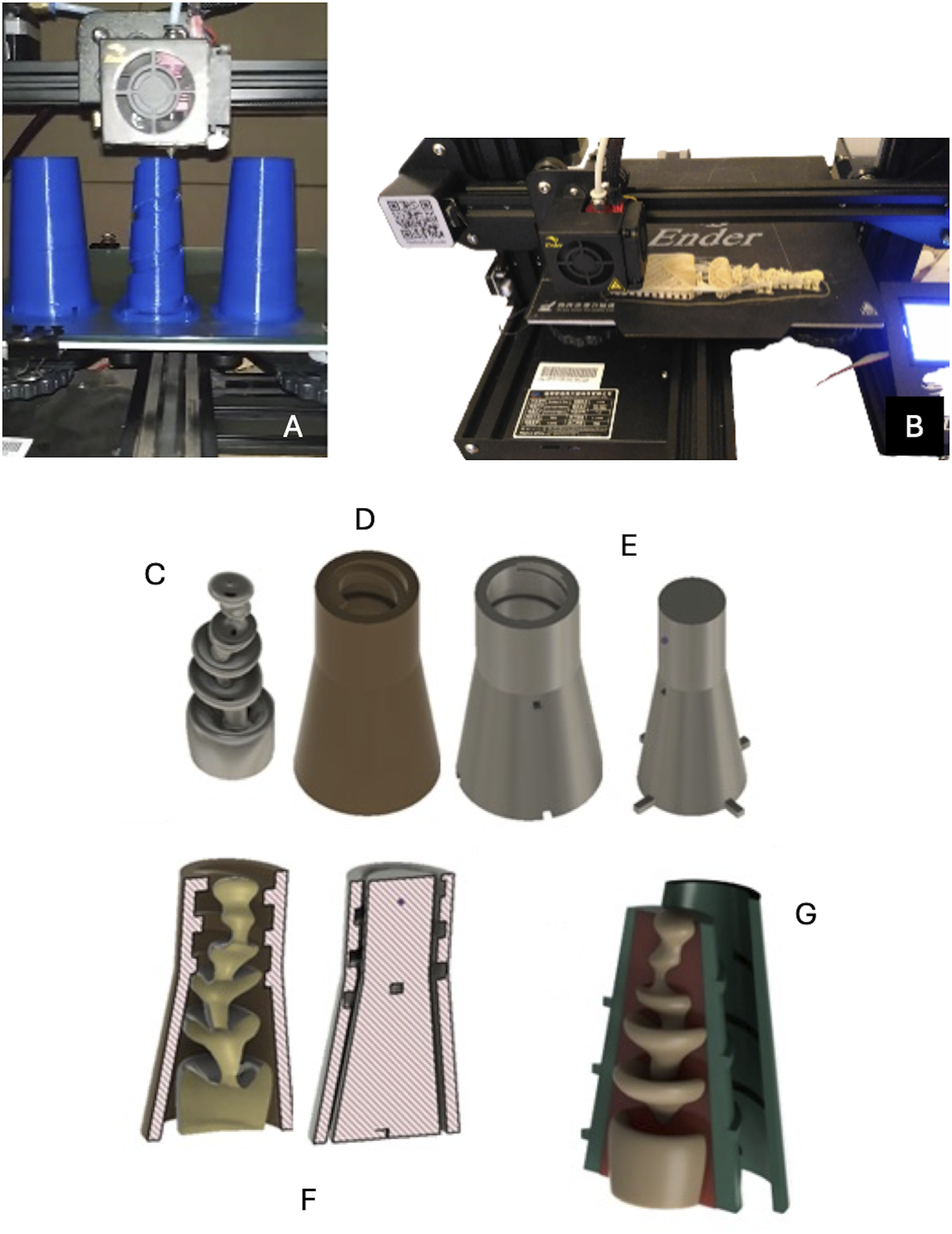
Initially, a water-soluble piece representing the internal area of the cervix was printed to allow the formation of the corresponding void (Figure 2(C)). This structure was accommodated in a tight 3D mold that outlined the first Platina silicone layer, notable for its rigidity and precision in reproducing the cervical rings (Figure 2(D)). This component was then inserted into a second mold; this allowed the addition of a layer of PLATSIL GEL 0030, a silicone with a texture similar to that of human tissue, with a threaded design for precise connection with the remaining part of the cervix (Figure 2(E) and 2(F)). Finally, another mold was used to create the section joining the silicone uterus, ensuring the connection between the two structures (Figure 2(G)).
The cervix constitution in the simulator was a critical concern, as it was important to produce a piece that met educational objectives and provided a realistic experience. Using two types of silicone rubber, one possessing greater internal rigidity and the other being softer on the exterior, contributed to gaining a segment resistance similar to that of the normal cervical rings, allowing the operators to feel resembling that of passing the pipette without losing the touch texture provided by the second layer of silicone. Additionally, an important feature of this simulator was the implementation of a model that allows the replacement of the cervix segment. This permits the insertion of different cervix conformations into the same model, providing a variety of challenges for the trainee during the teaching process.
Construction of Other Amovible Segments of the Bovine simulator
To produce the model of the Nelore cow uterus, a fiberglass mold divided into seven parts was employed, using a counter mold on the inner face; the latter was also produced by the sculptor Jânio Borges (Figure 3(A)), allowing to establish a limit for silicone rubber infusion, ensuring the production of parts with uniform filling. The reproductive apparatus was produced with PlatSil® silicone rubber (a two-part cured platinum mix of 1:1 v/v), and a gyroscope was used to enhance the distribution of silicone during vulcanization (Figure 3(B)). PlatSil Gel-OO30 was chosen for its lower viscosity and reduced adhesion during curing. After approximately 2 hours, the mold was ready, with a total curing time of 24 hours. Illustration of the production process of the Nelore cow reproductive tract and rectum models. (A) External modeling of the reproductive device using measurements. (B) Utilization of a gyroscope for silicone rubber distribution. (C) Female reproductive model in various silicone varieties. (D) Anus of the simulator crafted with thermolabile silicone. (E) Bag containing a slime-type solution.
The created fiberglass mold was filled with silicone during the vulcanization process to produce the molded parts. Initially, it was decided not to use counter molds, so silicone was applied directly, and a uniform distribution was ensured by rotating the external mold. This approach allowed us to obtain distinct parts, but they were not standardized. This inconvenience led to a return to the mold and counter mold approach once improvements were introduced to the spacing between the two molds and by increasing the flow of silicone at the initial part of the infusion, targeting the desired standardization of the reproductive apparatus parts (Figure 3(C)).
For simulators mimicking different conditions, it was decided to keep the entire reproductive apparatus model similar between manikins sharing the same external characteristics (to avoid the operator’s anticipation of cervical characteristics), using the size and shape of the uterine cervix inserted in the silicone model in the uterus to differentiate the simulators. Placing a structure representing the corpus luteum in the ovaries was also possible, giving greater realism to the reproductive apparatus.
To simulate the tactile sensation of hand insertion into the rectum, the thermolabile silicone SiqBorflex was used for the rectum segment (Figure 3(D)). The created simulator’s rectum is elastic and coated with soft fabric, mimicking the pelvic musculature. To increase the realistic experience of working in a live cow, a plastic bag was fashioned around the rectum model, filled with a gelatinous substance such as “Slime,” which is composed of cassava starch, water, and detergent. The gelatinous consistency provides the desired biological profile through a simple, low-cost alternative (Figure 3(E)).
A piece of synthetic leather was sewn to finalize the simulator, wrapping a sandbag in the same shape as the tail. It was fixed with a 3/8 screw attached to the fiberglass and a nut cast in a silicone mold. The distal part of the cow's tail was fixed with platinum silicone and a tuft of real tail hair.
Electronic Components of the Simulator
TrAI4Nel accommodates two types of electronic components. The first is designed to allow the assessment of the insertion of the insemination pipette up to the correct location, thereby evaluating the student’s performance (Figure 4(A)). For this system, sensors capable of determining the exact moment when the tip of the pipette reaches a specific site for semen deposition were used. For this purpose, a Reed Switch ampoule was employed at the end of the pipette, along with an appropriate positioning element at the end of the cervix. This sensor system is wired to a P4-type connector, while another female P4 connector is placed inside the fiberglass cow replica. One P4 terminal is connected to a 1.5-volt battery, while the other is connected to an LED installed on the back of the simulator’s “thigh”. When the magnetic sensor approaches the magnet, the circuit is completed, and the LED lights up, signaling to the learner that the desired point has been reached (Figure 4(B)). Presentation of the electronic components of the TrAI4Nel simulator. (A) Illustration of the automatic pipette transfer system. (B) Demonstration of LED light activation for precise semen deposition in the simulator. (C) Illustration of the internal components of the simulator. (D) Representation of the device creating the peristaltic movement of the simulator.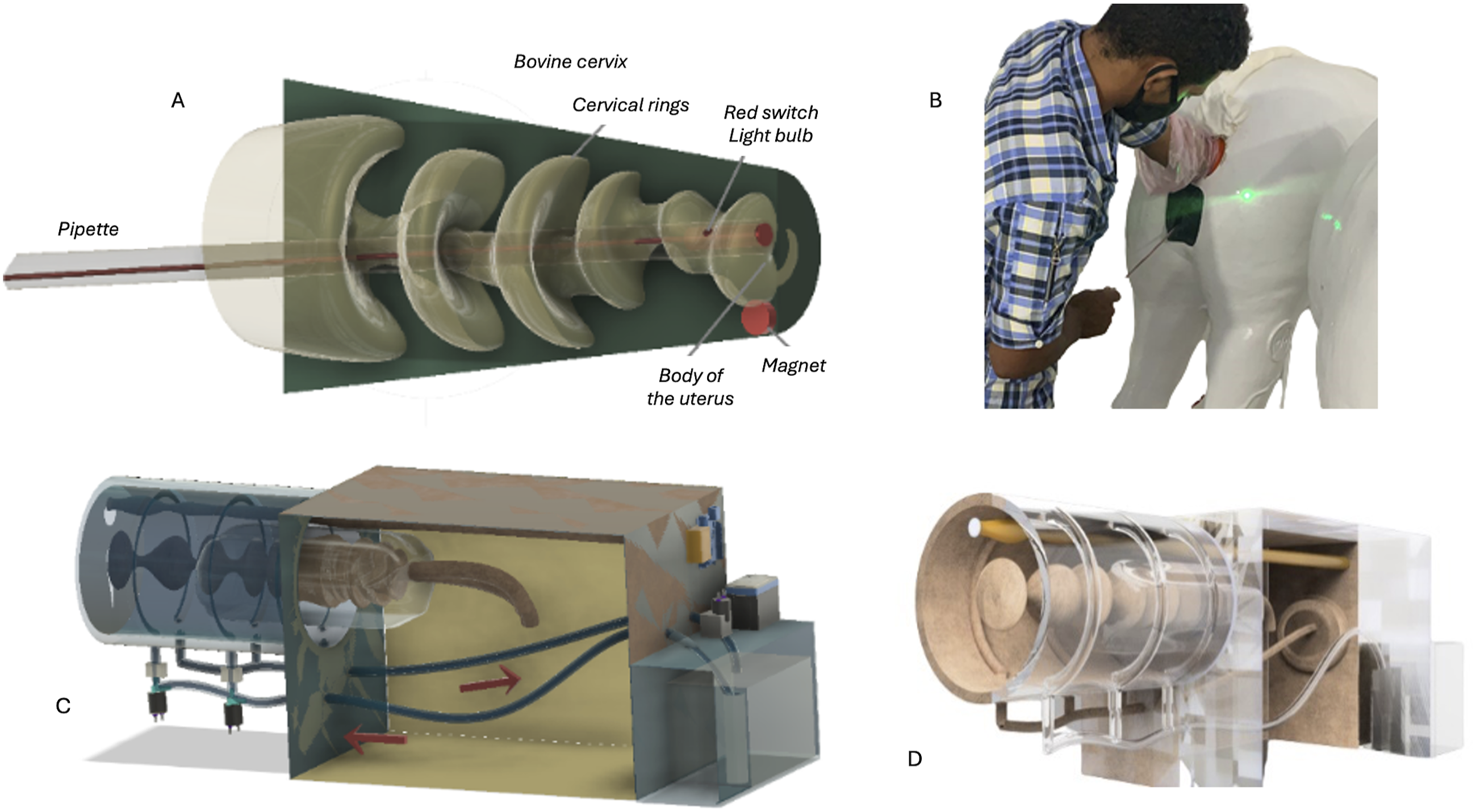
This innovative system added value to the simulator, confirming that the ideal location for semen deposition was reached and eliminating the need for manual confirmation by the instructor. In addition, it contributes to the student self-assessment and the instructor’s monitoring of both the correctness of the pipette location and the time to succeed.
The second electronic component aimed to mimic the peristaltic movements of the rectum (Figure 4(C)). It uses pump and solenoid valves interconnected by DMFIT polyethylene tubes. The 4 half-inch solenoid valves operate at 12 volts; when off, they are closed. When activated by an Arduino unit, the valves open to generate peristaltic movement in the simulator. This system mimics the natural intestinal tract movements of cows and provides realistic hands-on training for bovine AI procedures, ensuring that the simulator offers valuable educational experience. This system is powered by a universal fuel pump with a pressure of 4.2 bar and a flow rate of 105 L/h, which is responsible for pumping a coolant liquid—in this case, an anti-corrosive and anti-freezing organic radiator additive.
This entire assembly was controlled by a compatible Arduino Uno R3 Atmega328 Smd board programmed for random operation. The power for the system is supplied by Sealed Lead Vrla 12 V 7A Batteries for an Elgin alarm. To optimize the energy consumption of these batteries, an HC-sr04 ultrasonic distance sensor kit was integrated into the Arduino Shield, which is responsible for activating the entire electrical system when detecting the presence of an individual for training (Figure 4(C)). The DMFIT polyethylene tubes are connected by BMFIT quick couplings and inserted into a bicycle chamber, which is accommodated throughout the fiberglass pelvic space. When the Arduino-activated pump is on, the tire chamber is inflated with organic coolant, blocking the pelvic space of the simulator and creating the sensation of peristaltic movement. A grooved fabric houses the bicycle chambers to impede its movement out of place when inflated (Figure 4(D)).
Resourcing to the pump and solenoid system in the TrAI4Nel simulator represents a significant advancement in practical artificial insemination procedures. The ability to accurately simulate the peristaltic movements of the bovine intestinal tract endows the simulator with a high degree of realism, which is essential for developing practical skills. The interaction between electronic and mechanical components, managed by an Arduino board, supports dynamic and adaptive training experience, reflecting the real conditions found in the field, and sets a new standard in bovine reproduction training.
Results
Preliminary tests of the simulator were performed throughout the TrAI4Nel development by the researchers to check the functioning of the simulator. Some issues were identified and corrected during the production phase (such as obtaining a nonstandardized distribution of silicone during the vulcanization process when a counter mold was not used), as discussed earlier.
An important concern respects the trainee’s sensitivity in detecting pipette movements. When the pipette is inserted into the silicone vagina, its presence can be detected due to the thinner wall thickness of the genitalia model, specifically designed for this purpose. When sensing the pipette at the end of the vagina, the trainee can stabilize the cervix externally by securing the caudal cervical rings between the index and middle fingers, allowing the thumb to locate the cervical os. Simulating the technique used in in vivo animals, the trainee presses the pipette’s tip against the thumbnail, gradually withdrawing the thumb and allowing the pipette to advance into the cervix. At this point, the student can feel the pipette scraping through the cervical rings as it moves toward the desired location for semen deposition. Once the pipette has passed all the rings and moves unobstructed through the cervical rings, the sensor system signals the pipette’s arrival at the optimal point, activating the electronic system and illuminating an LED light located on the posterior right side of the fiberglass cow.
The tests showed that the sensor system signaling the positioning of the IA pipette has enough sensitivity to work correctly; despite being embedded in silicone, it can magnetize the sensor at the pipette’s tip, activating the LED light. It deserves mentioning that the sensor does not signal the presence of the pipette in an incorrect location. Since the end of the pipette is adjusted to accommodate a Reed Switch sensor, it must be well protected because of the glass ampoule of the sensor, which is easily breakable. Therefore, care must be taken when using this pipette to preserve its integrity.
The simulator tests further showed that the electronic system controlling peristaltic movement, which was designed to automatically start when sensing a standing operator behind the cow, presented a conflict and instability in the connection between Arduino’s program and the presence sensor. This issue was solved by deactivating this function and transitioning to a manual start of the system controlling the peristaltic movements. Currently, the simulator’s electronic system works perfectly and adds value to this equipment.
The anatomical fidelity of the genital tract model was further evaluated by a group of professionals (thirteen males and one female) with varying backgrounds in bovine artificial insemination. For this purpose, fourteen technicians of different ages (mean age: 34.43 years; SD = 11.27) and experience in Zebuine artificial insemination (mean duration of activity: 7.77 years; SD = 4.24; range: 3–15 years) were invited to test the simulator and provide feedback on its genital fidelity. After testing the simulators, the professionals were asked to complete a brief questionnaire composed of two sections. The first respected the sociodemographic characterization of the respondents. The questions in the second part focused on the perception of the overall model fidelity (the conformation, consistency, and malleability of the genital structures and if they considered the simulator a good replicate of the cow’s conditions during AI) and the possible add-value of the model compared with the abbatoir collected tracts (contribution to nurturing student autonomy, reduce the nervousness in executing the procedure, the acquisition of competence in passing the pipette across the cervix, the facilitation of performing the IA in a live animal, and to better engage students in the AI training). Respondents were requested to answer using a 5-point Likert scale (1- completely disagree; 2- disagree; 3- neutral; 4- agree; 5 – strongly agree). The second part intended to collect the respondents’ perceptions.
Overall, the professionals’ perception of the simulator’s fidelity, compared to the structures of the live animal, was very positive. All the professionals agreed on the high anatomical fidelity (six scored 4 points, and eight scored 5 points). They also were satisfied with the consistency of the anatomic model (eight scored 4 points and six scored 5 points) and its malleability (seven scored 4 points and seven scored 5 points). Regarding the model’s resemblance with the structures in the live animal, the 4-point score predominates, with nine answers compared with the five that rated it with 5 points. The professionals agreed that the simulator would improve learning more than the abattoir genital tracts. Nine respondents rated the different questions with a 5-point score, the remaining scoring with 4 points, except the questions about the reduction of nervousness in executing the procedure (six rated with 4 points and eight rated with 5 points).
Discussion
Developing veterinary simulators for artificial insemination training presents fundamental challenges beyond individual device design. A pertinent question is creating training tools that effectively bridge theoretical knowledge and practical application while reducing live animal use. This concern encompasses multiple critical considerations in simulator development.
The primary challenge lies in balancing anatomical fidelity with practical functionality. Students often encounter significant differences when transitioning from simulators to live animals (Bossaert et al., 2009), highlighting the need to identify essential elements that constitute effective veterinary simulation. This issue extends to the tension between complexity and accessibility - while advanced technologies can enhance simulation fidelity, they often increase costs significantly, potentially limiting widespread adoption in educational settings.
Simulators must also address the need for adaptable learning experiences that accommodate different skill levels and diverse learning necessities. Creating progressive difficulty levels while maintaining realistic conditions requires carefully integrating mechanical design and pedagogical principles.
Simulators for education purposes are widely recognized as valuable tools. Some studies indicate that simulators increase student satisfaction and self-confidence (Alrashidi et al., 2023; Aly et al., 2023; Marcos et al., 2023; Yu et al., 2021), reflecting perceived positive performance. Participants also usually reinforce that constant practice is essential for developing expertise, increases students’ competence and confidence, and endorses better clinical performance, regardless of the fidelity of the materials used for training (Blau et al., 2020). In addition, using a simulator during training offers an opportunity for learning by repetition (da Silva & Pinto, 2023), overcoming the limitations of practice with live animals and contributing to preserving animal welfare (Martinsen & Jukes, 2005). Commercial manikins and simulators are available for training artificial bovine insemination procedures. These studies usually use the Bos taurus cow reproductive tract as a model and are usually costly, limiting the number of models and manikins used within the classes. Physical simulators and models reduce the number of live animals needed to train bovine AI, fostering ethical and animal welfare practices while requesting the efficient use of models and simulators (Azuaga Filho et al., 2024). While simulators have demonstrated value in increasing student satisfaction and self-confidence (Alrashidi et al., 2023; Aly et al., 2023), questions remain about validating these subjective improvements against objective measures of clinical competence.
This work aimed to describe the development of a simulator intended for use in artificial insemination courses, a tool of great importance for this type of teaching. Alternative solutions, such as the wide range of flexible silicone rubbers and advances in modeling and 3D printing, have introduced new opportunities in constructing simulators, particularly concerning their realism and practical applicability. This highlights the importance of carefully selecting simulators to be integrated into the curriculum, emphasizing future research to enhance their implementation (Noyes et al., 2022). In contrast to other available manikkins and simulators, the TrAI4Nel was designed to consider the internal and external characteristics of zebuine cows, which present differences in phenotypic characteristics relative to other breeds (Islam et al., 2018).
When comparing the specific mechanisms to simulate peristalsis between available simulators for training transrectal palpation or artificial insemination in bovine, specific mechanisms to simulate peristalsis were not highlighted in the literature. Most commercially available simulators prioritize structural fidelity of the reproductive tract and ease of use for repetitive practice. Active mechanical or fluid-based peristalsis simulation appears limited or yet to be documented in peer-reviewed studies about the commercially available simulators, as manufacturers focus on physical feedback rather than dynamic motion. Even advanced haptic simulators incorporating virtual reality technology with enhanced sensory feedback for transrectal palpation and AI procedures cannot replicate mechanical tissue responses, as do not incorporate fluid dynamics or peristalsis simulation. In the TrAI4Nel simulator, the speed and force generated by the Arduino-controlled system are within safe operating parameters for the pelvic membrane. While direct comparisons with other simulators are impaired, it could be said that the system included in TrAI4Nel differs from existing market solutions in a key aspect: most simulators mimic intestinal peristalsis without containing the reproductive tract fluid within membranes or sheathed systems, unlike the Breed’nBetsy® design, which creates movement through fluid displacement in a suspended model. Based on our system design, the membrane’s durability (comparable to a bicycle tire tube) far exceeds the pump and Arduino controller’s maximum force and speed capabilities. The primary operational concern is not membrane damage but ensuring the chamber filling time does not exceed the liquid storage capacity.
Most simulators developed for transrectal palpation and AI training do not completely replace the use of live animals in training programs, even though they are useful teaching tools if combined with traditional training methods (Annandale et al., 2018; Jaśkowski et al., 2020; Koziol et al., 2023). Students who have used such models state that they find disturbing differences when moving from the simulator into the live cow (Bossaert et al., 2009), suggesting that the device does not faithfully reproduce bovine anatomy or provide the same perception as the cow. To avoid this drawback, the TrAI4Nel simulator seeks fidelity with the animal’s pelvic cavity and uses a gel bag to mimic the textures of the organs. Incorporating a cervix model shaped from real Nelore’s cervices collected at an abattoir (Azuaga Filho et al., 2024) offers an artificial insemination training experience that is remarkably close to reality, particularly for pipette passages across the cervical canal. It also reproduces the natural sensation of inserting a hand into a cow’s rectum and the peristaltic movement of its intestinal tract. The TrAI4Nel further features a modular component that allows the exchange of the cervical segment to simulate different complexity levels and prepare the students for various clinical scenarios, avoiding the predictability found in particular models. This motivates participants to dedicate more time to training and seek greater efficiency.
To the best of our knowledge, the TrAI4Nel simulator is the first to offer the ability to monitor the passage of the pipette during training, a feature not available in any other simulator. This reflects the collaborative effort and continuous innovation that drive the enhancement of this new simulator, ensuring that it exceeds educational and practical expectations and highlighting its value for learning AI procedures. This function of the simulator supports the trainee’s self-assessment by signaling the pipette entrance in the uterus, and it also supports the supervisor role and its use in the assessment of student performance.
The TrAI4Nel simulator seeks to reproduce the main difficulties beginners face when manipulating a cow for the first time. The goal is to train participants for the necessary time to transition safely and effectively into a living cow, minimizing the trainee’s emotional stress caused by the tension and expectation of dealing with the animal. In addition, it aims to significantly reduce animal injuries, as participants will already have practice locating and handling the reproductive apparatus. The protection of innovation through patents ensures the uniqueness and technical quality of the TrAI4Nel simulator. The innovative intellectual property included in the TrAI4Nel simulator is protected by two patents (BR 10 2022 026340 0 and BR 20 2023 003069 1). These studies focused on artificial insemination training simulators for cattle designed to provide practical and realistic experience; their main features included the portability, lightness, and use of organic materials to accurately simulate the texture and dimensions of the bovine reproductive tract of the simulator; and the incorporation of interactive technologies (e.g., sensors and LEDs) that guide and enhance autonomous training, focusing on the correct handling and deposition of semen.
A critical gap exists in validating the correlation between simulator performance and clinical competence. While students who practice with simulators generally report increased confidence (Alrashidi et al., 2023; Aly et al., 2023), few studies systematically compare their subsequent performance on live animals against traditionally trained practitioners. Current approaches typically focus on immediate learning outcomes through pre- and post-training assessments and user satisfaction surveys (Annandale et al., 2018; Koziol et al., 2023) but rarely include longitudinal studies tracking skills transfer to clinical practice.
This validation gap is particularly notable in artificial insemination training, where success rates in live animals serve as the ultimate measure of competency but are rarely tracked back to specific training methodologies.
The assessment of simulator fidelity itself presents another challenge. While anatomical accuracy can be measured objectively, the validation of tactile feedback and tissue response often relies on subjective expert evaluation. This highlights the need for more objective methods to assess how closely simulators reproduce the sensory experience of working with live animals, particularly in procedures like artificial insemination, where tactile perception is crucial. The professionals who evaluated the TrAI4Nel simulator provided very positive feedback about the fidelity of the genital tract model, particularly with the consistency and feel provided by the materials used to build it. Their perceptions support the simulator’s realism and pave the way for its validation in hands-on courses in bovine AI.
Limitations and Suggestions for Future Research
Some limitations may be pointed out to the development of the TrAI4Nel simulator. First, an issue remains to be solved, regarding the electronic system controlling peristaltic movement. Albeit functional, the system operates now with a manual start. We hope to overcome this issue allowing the simulator to operate in fully automatic mode.
During its development, the simulator has been evaluated by experienced researchers. Still, future research should prioritize longitudinal studies that track practitioners’ success rates with live animals, directly comparing outcomes between simulator-trained and traditional trainees, particularly focusing on first-time success rates in artificial insemination. The validation stage is ongoing, and there have been positive results so far. However, the number of trainees need to be scaled for consistent results. Additionally, developing standardized, objective methods for validating tactile feedback and tissue response would address a critical gap in simulator assessment, moving beyond current subjective evaluations to establish evidence-based metrics for simulator effectiveness.
Conclusion
The simulator described herein represents a significant advancement for artificial insemination training in zebuine cows. With the incorporation of technological innovations such as 3D modeling and the integration of electronic components, it was designed to enhance the user experience while offering a training tool that simulates real-life conditions of the procedure with high precision. The use of new materials that ensure durability and anatomical fidelity keeps the product accessible.
The TrAI4NEL simulator seeks to meet the market requirements for high-quality educational resources. Implementing this simulator in artificial insemination courses targets more efficient training, emphasizing safe practices and high ethics standards, contributing to reducing the use of live animals. This innovative simulator has the potential to transform artificial insemination training, enabling the development of autonomy and confidence on top of the technical mastering of the AI procedure and preparing future professionals to face the field’s challenges.
Footnotes
Acknowledgments
The authors are thankful to Mr. Jânio Borges, for his gracious sculpture of the clay model used in the silicone modeling of the genital tract.
Author Contributions
All authors contributed to the study conception and design. Material preparation and modeling were performed by Heitor Azuaga Filho, under the surpervision of Bruno Colaço and Rita Payan Carreira. The first draft of the manuscript was written by Rita Payan Carreira and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded in part by the Fundação para a Ciência e Tecnologia (FCT, Funder ID=50110000187) under the Grants UIDP/04923/2020 and UIDP/00772/2020.