
Abstract
This research introduces a novel paradigm in autonomous reconfigurable material systems by leveraging liquid crystal elastomer (LCE) actuators for shape referencing in reconfigurable beams. The approach integrates sensing, processing, memory, and actuation capabilities to develop foundations for intelligence in material systems. The methodology utilizes stimuli-responsive materials such as electroactive LCE actuators with a silver thermoplastic polyurethane (Ag-TPU) heating element to enable self-adaptive behavior. A bistable 1-bit unit cell is the foundational element, showcasing successful toggling between binary ‘0’ and ‘1’ states. Logical functions are used to develop an electro-mechanical network on a multi-cell system. The proof-of-concept prototype demonstrates the feasibility of embedding autonomous behavior into beams. Using programmable logic, the prototype can adapt and mirror the shape changes of a reference configuration. The research presents a versatile and adaptive approach that expands the potential applications of autonomous intelligent material systems.
Introduction
Material systems with intelligence have been of great interest in recent research. For material systems to be deemed to exhibit intelligent behavior, they must integrate sensing, processing, memory, and actuation capabilities (Alù et al., 2025; Aubin et al., 2022; Kaspar et al., 2021; McEvoy and Correll, 2015; Sitti, 2021). Inspired by this impetus, researchers have presented approaches that abstract digital logic in various mechanical systems (Chen et al., 2021; El Helou et al., 2021; Hyatt and Harne, 2023; Meng et al., 2023; Yasuda et al., 2021; Zhang et al., 2023a, 2023b) . For instance, researchers have utilized curved beams (Mei et al., 2021), soft and conductive mechanical metamaterials (El Helou et al., 2022), origami (Meng et al., 2021; Novelino et al., 2020; Treml et al., 2018; Yasuda et al., 2017), and photo-responsive liquid crystal elastomers (Tholen et al., 2023). While these advances have shown significant progress in the development of intelligence in material systems, challenges remain in the integration of shape adaptation capabilities in response to external stimuli.
To surmount challenges with the integration of actuation capabilities in intelligent material systems, advancements have been made to stimuli-responsive materials (Chi et al., 2022; Xia et al., 2022). In particular, liquid crystal elastomer (LCE) actuators have exhibited favorable behavior because they can generate large and reversible actuation, as well as respond to multiple external stimuli, such as heat and optics (Bisoyi and Li, 2022; Maghsoodi and Bhattacharya, 2024; Sanagala and Bhattacharya, 2025; Sun et al., 2023; Tholen et al., 2023; Wang et al., 2022). Kotikian et al. (2021) devised LCE actuators that contract through Joule heating generated from embedded conductive elements. El Helou et al. (2024) integrated electroactive LCE actuators to perform sequential logic operations in a mechanical computing material platform to solve linear algebraic equations. The sequential logic employed in El Helou et al. (2024) exhibits a rudimentary form of memory where a subsequent action is determined by a previous state of the system and not solely due to external inputs. Such innovations present new opportunities for embedding sequential logic into structural components, facilitating autonomous, adaptive structural behaviors in practical engineering applications.
The principles of autonomous mechanical material systems explored in previous work can be expanded from abstract computing structures to other foundational geometric elements such as beams. Beams have been foundational elements in bridges (Galvín et al., 2021; Zhu et al., 2020), vehicle design (Bennbaia et al., 2023; Godara and Narayan Nagar, 2020), aircrafts (Cardoso, 2020; Martins et al., 2020), robotics (Pappalardo et al., 2023; Sarkhel et al., 2023), multistable structures (Kwakernaak et al., 2024), and microelectronics (Manvi and Mruthyunjaya Swamy, 2022; Saleh et al., 2022), among many others. Integrating intelligent, self-adaptive behaviors into beam designs would elevate their performance by enabling responsive and autonomous behavior, allowing them to dynamically respond to changes in configuration.
This research demonstrates an approach to implement autonomous shape referencing behavior in a scalable beam platform. Figure 1(a) illustrates a beam platform where shape changes in a reference beam are mirrored in a neighboring reconfigurable beam. The proof-of-concept prototype used to demonstrate such shape referencing in reconfigurable beams is shown in Figure 1(b). An electrically conductive mechanical-electrical network is integrated into reconfigurable thermoplastic polyurethane (TPU) beams for sensing and information processing, and magnetic inserts enforce multistable behavior for non-volatile memory. Figure 1(c) presents a general description of the mechanological information processing of the beam system. The configurations of the reference and reconfigurable sides serve as the inputs to a set of Boolean logic functions that determine the electrical signals to send to the embedded LCE actuators as shown in Figure 1(b). The LCE actuators utilized in this research are constructed with a silver thermoplastic polyurethane (Ag-TPU) heating element and cross-linked LCE films using the materials and fabrication processes described by El Helou et al. (2024). Figure 1(d) illustrates the operation of a single LCE actuator used in this work. When (i) voltage is applied to the Ag-TPU heating element, (ii) the Joule heating element increases in temperature and (iii) causes the cross-linked LCE material to contract. When voltage is removed from the Ag-TPU heating element, the temperature of the actuator decreases and (iv) the LCE returns to its original length. The subsequent sections provide details on the design and fabrication of the presented shape referencing reconfigurable beam and experimental efforts to demonstrate its application.
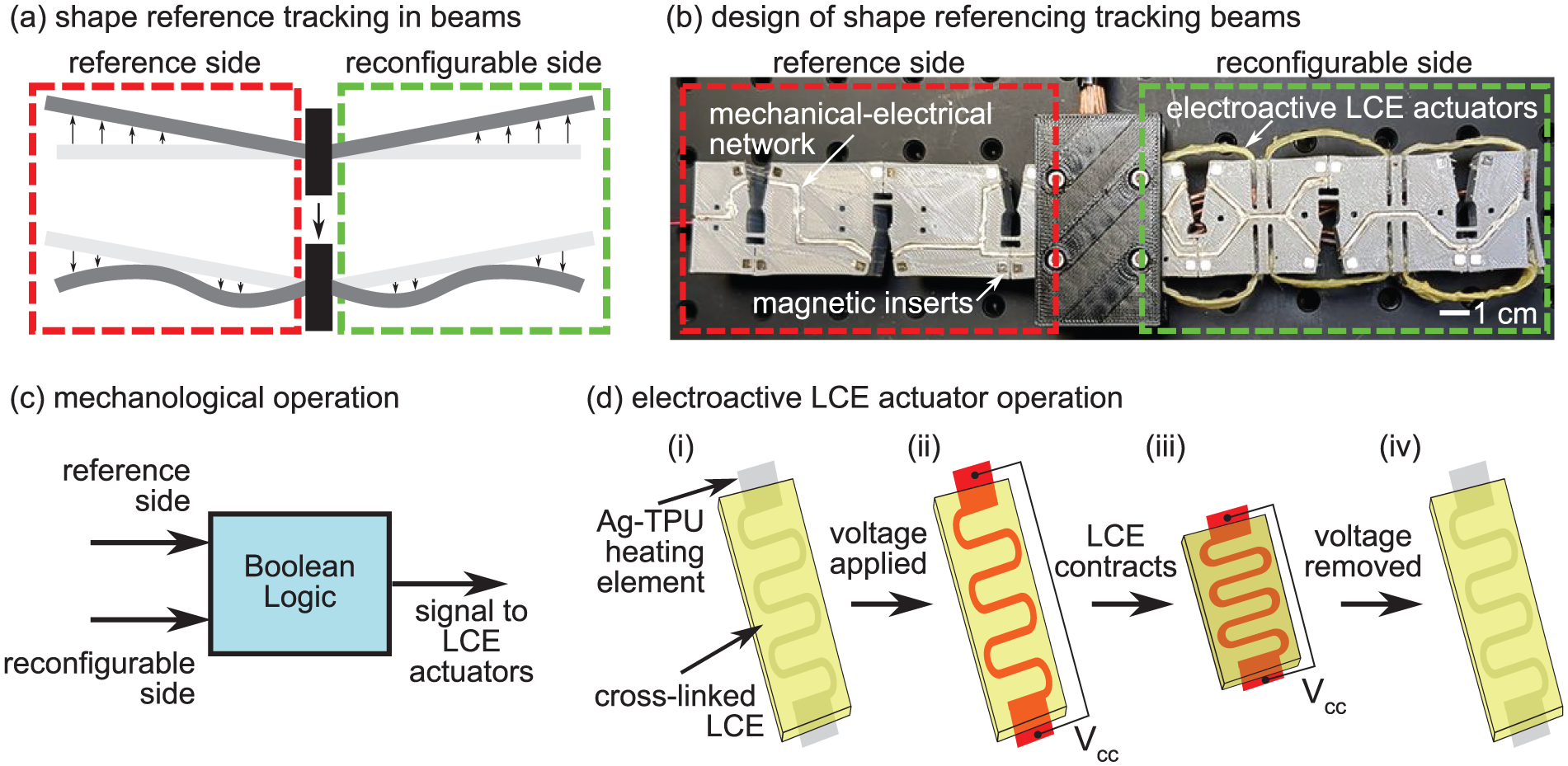
(a) Illustration of shape referencing with reconfigurable beams. (b) Proof-of-concept prototype for a reconfigurable beam structure that mirrors the reference shape of a connected beam structure. (c) Diagram illustrating the fundamental components required for a mechanical-electrical network design. (d) Depiction of the liquid crystal elastomer (LCE) actuator behavior with applied voltage, Vcc.
Unit-cell design and operation of 1-bit system
The beam system presented in this work consists of connected bistable units. Figure 2 outlines the design, operation and characterization of a single unit cell. The unit cell consists of a hinged body, channels for the mechanical-electrical network, and magnetic inserts to enforce bistability, as it is shown in Figure 2(a). The geometric parameters that define the profile of the unit cell hinge are a length
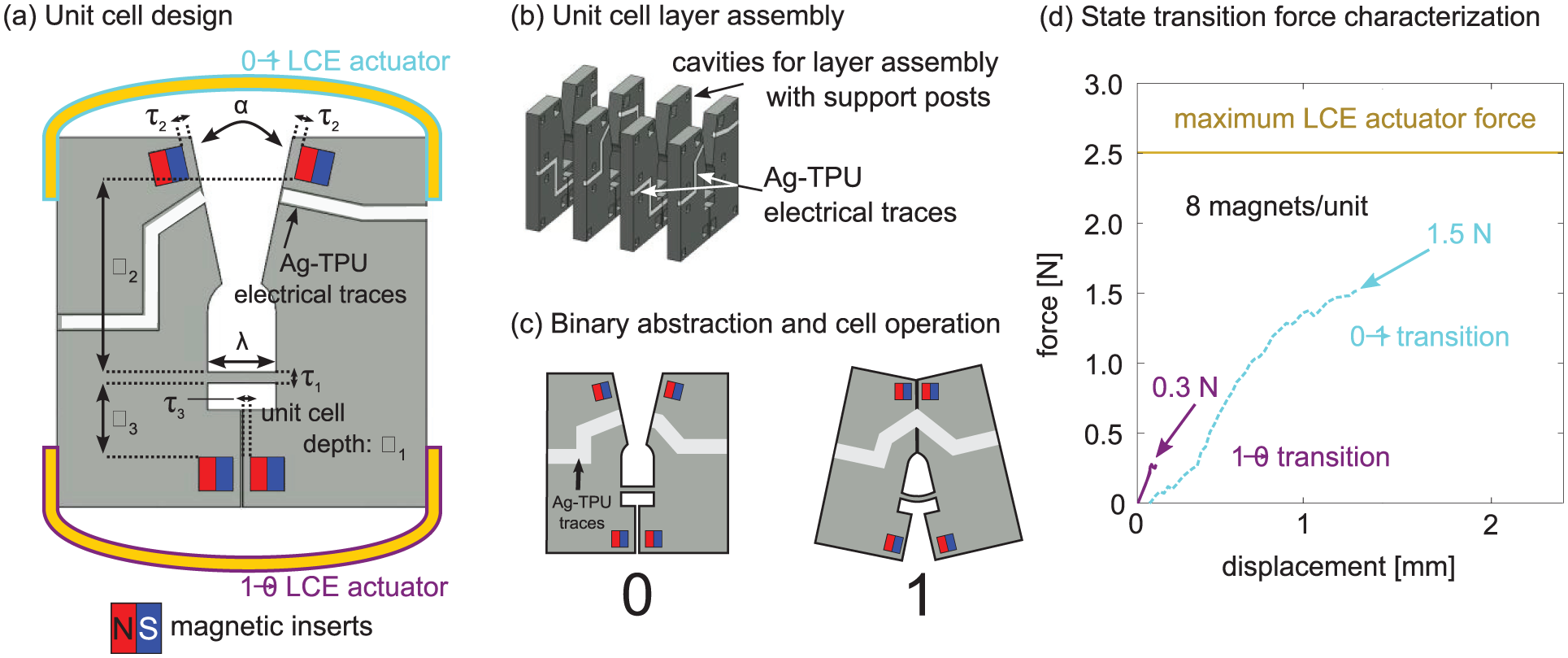
Design and operation of the 1-bit unit cell that is used for reconfigurable beam structures that shape reference.(a) Geometric parameters that are used in the design and construction of the 1-bit unit cell. (b) Illustration of multiple layer assembly for designs that require multiple electrical traces. (c) Operation of a 1-bit unit cell prototype with the 1 and 0 mechanical states shown. (d) Experimental mechanical characterization of the 1-bit unit cell magnetic forces in the 0 and 1 states compared to the max LCE actuator force.
Geometric parameters used to construct the 1-bit unit cell hinge and magnetic insert placement.

Figure 2(b) illustrates how a unit cell design shown in Figure 2(a) can be split into layers to support the utilization of multiple mechanical-electrical network traces. This can increase the information processing density like the strategy employed by El Helou et al. (2024). Figure 2(b) also highlights cavities that can be added to the 1-bit unit cell design for the insertion of support posts for layer assembly. This ensures that each layer is coupled and remains in the same configuration within the assembly. In this work, a unit cell refers to the assembly of layers which share the same bistable state. Each unit cell assembly has two LCE actuators that allow the cell to transition between configurations as seen in Figure 2(a).
Using principles of mechanological computing, the bistable unit cell can be abstracted as a mechanical bit with binary configurations of ‘0’ and ‘1’ as shown in Figure 2(c). Depending on the design of the mechanical-electrical network, a conductive path can be connected or disconnected in different configurations allowing electrical current to pass to a subsequent unit or output actuator. The LCE actuators shown in Figure 2(a) are attached to each end of the 1-bit unit cell to transition the cell between configurations. In this work, the beam units are fabricated with a 3D printer (Ender 3V2) set to 15% infill using thermoplastic polyurethane (TPU) with a Shore hardness of 95A (OVERTURE). The magnetic inserts utilized in the 1-bit unit cell prototype are 3 mm cubic N50 Neodymium magnets. The channels for the mechanical-electrical network traces are filled with silver thermoplastic polyurethane (Ag-TPU) conductive ink that is fabricated with processes used in previous work (El Helou et al., 2021, 2024; Hyatt and Harne, 2023).
The force relationship between the LCE actuators and the magnetic inserts in a unit cell assembly is summarized in Figure 2(d). The units characterized here had four pairs of magnetic inserts for a total of eight magnets. The actuation force needed to transition from one state to the other is experimentally characterized by measuring the force in a load frame (ADMET eXpert 5600) equipped with a load cell (PCB 110205A). To obtain the results shown in Figure 2(d), a sample of the unit cell with eight magnets is secured in a load frame, and a platen is lowered to actuate the unit cell. The reaction load on the platen during the actuation of the unit cell is recorded until the mechanism reaches the snap-through threshold and transitions to the alternate state. At this point the unit cell is no longer in contact with the platen, so the negative stiffness region in the force-displacement curve is not captured. For this work, the relevant property of the bistable system is the actuation threshold which is the maximum force recorded before the snap-through. The results in Figure 2(d) show that a maximum force of 0.3 N is required to pull the 1-bit unit cell from the ‘1’ state to the ‘0’ state (solid purple line), whereas a maximum force of 1.5 N is required to pull it from the ‘0’ state into the ‘1’ state (dashed cyan line). The average maximum force for the LCE actuators used in this work was characterized in El Helou et al. (2024) and was found to be approximately 2.5 N. This maximum force is shown by the golden horizontal line. Because the transition forces from one state to the other are both less than the maximum LCE force, the actuator shown in Figure 2(a) is sufficient to toggle between the ‘0’ and ‘1’ states. The actuation forces recorded in Figure 2(d) are obtained from a sample unit cell with no LCE actuators attached. In this system, the stiffness of the unheated LCE actuators can be considered negligible as the actuators are long enough that they remain in a relaxed state during the transition. Furthermore, when activated, the LCE actuators in this work generate sufficient force to overcome the magnetic resistance associated with toggling between states, as shown in Figure 2(d). This ensures that any minor resistive effects from actuator alignment or attachment are dominated by the active contraction of the LCE, allowing reliable state transitions.
Shape referencing in self-reconfigurable beams
The design and construction of a proof-of-concept prototype is presented that demonstrates the operation of a beam capable of self-reconfiguring to match a given reference shape. First, the logical operations that provide the basis for operation are outlined. Subsequently, the physical design and assembly are explained.
Logic diagram and corresponding electrical trace patterns for shape referencing
The logic diagram in Figure 3(a) illustrates the logical operations for a three-bit beam system with three units on both the reference and reconfigurable sides as shown in Figure 1(b). The logic diagram compares the reference unit cells
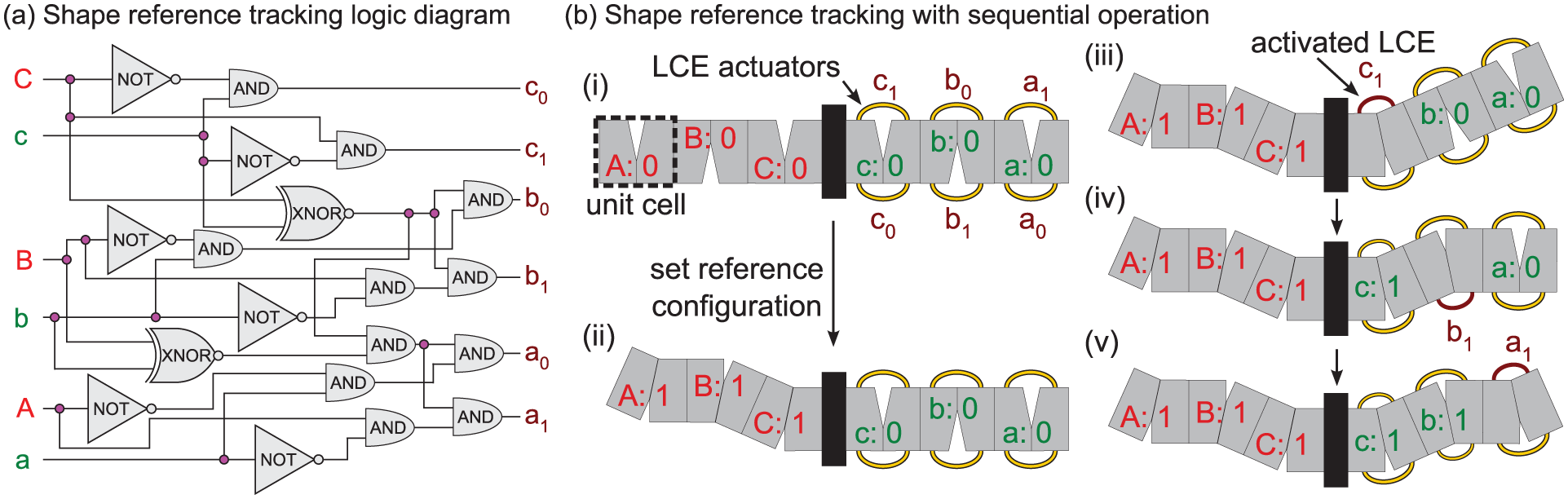
(a) Logic diagram for shape referencing structures with sequential operation. Inputs are the configurations of the reference and reconfigurable sides, and outputs are electrical signals to LCE actuators. (b) Schematic detailing the sequence of reconfiguration based on a given reference configuration.
To provide further clarification on how the logic diagram shown in Figure 3(a) relates to the shape referencing in the beams, Figure 3(b) shows the binary value of the input configurations and sequential output signal overlaid on the reference and reconfigurable beams. When the reference beam is configured such that (ii) the unit cells
Note that the output electrical signal is governed by both the reference shape and the current state of the reconfigurable beam which is characteristic of a system that exhibits a form of memory. Consequently, the same configuration on the reference beam can result in distinct sequences of electrical signals to activate the LCE actuators, depending on the prior state of the reconfigurable beam. In a system with no form of memory, each reference configuration would result in a single output signal independent of system history.
The Boolean characteristic equations for the output signals can be generated from the logic diagram in Figure 3(a). Equations (1)–(6) are then utilized to determine the electrical Ag-TPU trace patterns needed for all eight possible configurations of the three-bit reference beam. The principles of creating a trace pattern have been adapted from El Helou et al. (2021).




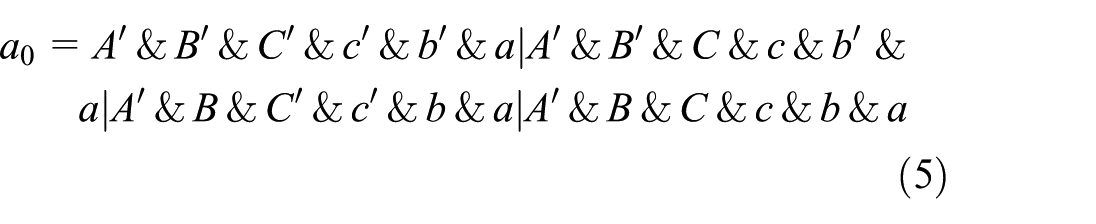
While equations (1)–(6) represent the simplest form of the Boolean representations of the function described by the logic diagram in Figure 3(a), it is important to note that alternate logic designs could be considered. Multiple logic architectures could feasibly achieve the same shape-referencing behavior depending on design constraints such as energy efficiency, response speed, or fabrication complexity. In this work, the selected design prioritizes simplicity and modularity to facilitate implementation in a multi-layer mechanical-electrical network. The XNOR-based structure enables sequential logic with minimal overlap in trace routing, reducing the risk of unintentional actuation and easing integration into the reconfigurable beam architecture.
Prototype design and fabrication
The illustrations in Figure 4(a) show the design methodology for the three-bit reference and reconfigurable beams for shape referencing of this work. The reference and reconfigurable beams are both designed from the unit cell presented in Section 2, with three unit cells each that generate eight unique configurations. The reconfigurable beam design has also been modified with slots to accommodate LCE actuators, which are utilized by the reconfigurable beam, in combination with the mechanical-electrical network to mirror the shape configuration of the reference beam.
Shape referencing structure design with eight shape configurations. (a) Schematic of the mechanical-electrical network design methodology for both the reference and reconfigurable beams. (b) Illustrations of both the reference beam and reconfigurable beam layer assemblies.
Figure 4(a) also shows a portion of the mechanical-electrical network design on the reference and reconfigurable sides. To operate the system, a power supply of
The illustrations in Figure 4(b) depict the design assemblies for the multi-layer reference and reconfigurable beams. The assembly for the reference beam consists of four layers with electrical Ag-TPU trace networks on each. Cavities are added to unit cell
Physical demonstration of shape referencing with sequential logic
The realization of shape referencing with a reconfigurable beam system is presented here. Figure 5 shows the operation of a proof-of-concept based on the designs described in the previous sections. The 3D printed reference and reconfigurable beams are anchored together with screws to an enclosure that stores the wiring connections between the reference beam and reconfigurable beam electrical traces. The enclosure is 3D printed using polylactic acid (PLA). The LCE actuators are connected to the Ag-TPU traces on the unit cell with copper wire. The shape referencing beam system is powered with a voltage supply of 3 V attached to the Ag-TPU traces of cell
Demonstration of three-unit shape referencing beam. Photographs in the dashed box show the sequential operation of the reconfigurable units to mirror the reference side.
Figure 5 shows photographs of the sequential reconfiguration where the reference beam is initially configured to equal 1-1-1 while the reconfigurable beam is configured to equal 0-0-0. The intermediate results shown in the dashed box indicate that at 8.6 s, the innermost unit cell
While this demonstration focuses on the reconfiguration sequence for a single pair of reference and initial reconfigurable beams, the design of the system described by the logic diagram in Figure 3(a) and the trace patterns outlined in the Supporting Information is capable of operating with all possible combinations of reference and reconfigurable beams. Whenever the reference beam is changed to a new shape, the reconfigurable beam will begin transitioning to match the appropriate configuration.
Discussion
The integration of mechanical computing with electroactive materials presented in this work opens opportunities for autonomous structural adaptation and responsive intelligent materials. By demonstrating autonomous shape referencing using mechanical logic operations implemented within mechanically bistable systems and electroactive actuators, this research establishes a novel methodology for smart structural design.
Current sensor-actuator electronics exhibit reliable and fast response to external stimuli. These systems typically employ centralized microcontrollers to interpret the sensor data and command actuators. While effective in many applications, these systems can introduce complexity with wiring, computational requirements, and susceptibility to electronic failure. One key feature of this work is the ability to embed intelligence directly within the material structure itself, reducing reliance on external controllers and increasing system robustness and reliability in dynamic or uncertain environments. Such a self-contained, logic-driven approach could advance structural health monitoring, adaptive robotics, and deployable or morphing structures that require precise control of configuration or shape. A promising application exists in civil architecture to imbed mechanical logic and autonomous actuation in structural beams in buildings or bridges. These reconfigurable beams can adapt stiffness, shape, or other properties in response to detected seismic activity. Instead of relying on centralized controllers, the embedded and distributed intelligent material systems can reduce the risk of failure.
Future work could expand the complexity and scalability of the logical operations embedded within such structures. An example of complex operations that could be explored include counters or timers which can cause an operation only after a repeated number of changes to monitor wear or fatigue. Furthermore, a multiplexer functionality could be integrated to route information from a single input to multiple output systems. Increasing the number of logic bits and refining the material properties, including durability and responsiveness under repeated cycling, would extend functionality and practical deployment scenarios. Yet, with the current approach, some challenges arise as the design is scaled up to include more units or more complex operations. Increased numbers of unit cells introduce more electrical connections and networks that may amplify the risk of signal transfer throughout the system. To mitigate such challenges, additional research can explore alternate manufacturing techniques such as printed electronics or other modular assembly approaches that simplify the routing and integration of the mechanical-electrical network. Additionally, integrating wireless control capabilities or energy harvesting methods could broaden the application potential, enabling fully autonomous systems that dynamically interact with and respond to their environments without external power supplies or wired connections.
While this work presents a proof of concept for autonomous shape referencing in beam systems, there are some limitations to the approach. The reliance on joule heating in LCE actuators introduces potential challenges with thermal management and the response time of the system. To respond to more dynamic or high-frequency changes, alternate actuation mechanisms must be explored. Exploring alternative stimuli-responsive materials, such as magneto-responsive or photo-responsive materials, could also enhance performance by providing faster response times, improved energy efficiency, or remote activation capabilities. Additionally, optimizing the design to accommodate miniaturization may broaden applications into biomedical devices, precision instrumentation, and microelectromechanical systems (MEMS).
Conclusion
This research introduces an innovative approach to integrate autonomous behavior in a mechanical material system by enabling shape referencing beams capable of self-reconfiguration. The initial phase involves an in-depth examination of unit cell geometry, serving as the groundwork for constructing reconfigurable beams. Subsequently, a mechanical-electrical network design for sequential reconfiguration, in conjunction with the unit cell geometry, is outlined, informing the design and assembly of a proof-of-concept prototype. The reconfigurable beam geometry and mechano-electric logic circuitry is then successfully validated with a physical demonstration. This research underscores the potential for further investigations into shape referencing structures integrated with intelligent material systems, leveraging the methodology and outcomes of this study.
Supplemental Material
sj-docx-1-jim-10.1177_1045389X251383787 – Supplemental material for Shape referencing in reconfigurable beams via adaptive electroactive material systems
Supplemental material, sj-docx-1-jim-10.1177_1045389X251383787 for Shape referencing in reconfigurable beams via adaptive electroactive material systems by Lance P. Hyatt, Christopher S. Bentley, Philip R. Buskohl, Ryan L. Harne and Jared Butler in Journal of Intelligent Material Systems and Structures
Supplemental Material
sj-eps-2-jim-10.1177_1045389X251383787 – Supplemental material for Shape referencing in reconfigurable beams via adaptive electroactive material systems
Supplemental material, sj-eps-2-jim-10.1177_1045389X251383787 for Shape referencing in reconfigurable beams via adaptive electroactive material systems by Lance P. Hyatt, Christopher S. Bentley, Philip R. Buskohl, Ryan L. Harne and Jared Butler in Journal of Intelligent Material Systems and Structures
Footnotes
Acknowledgements
We acknowledge helpful conversations with Ms. Haley Tholen and the team of researchers at the Air Force Research Laboratory over the duration of this work.
Author contributions
Conceptualization: LPH, CSB, PRB, RLH, JJB. Methodology: LPH, CSB, RLH, JJB. Investigation: LPH, CSB. Data analysis: LPH, CSB, PRB, RLH, JJB. Funding acquisition: PRB, RLH. Project administration: RLH, JJB. Supervision: PRB, RLH, JJB. Writing – original draft: LPH, CSB, PRB, RLH, JJB. Writing – review & editing: LPH, CSB, PRB, RLH, JJB.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported in part by the Air Force Research Laboratory, the Air Force Office of Scientific Research, the National Science Foundation (CMMI-2314559), and the Army Research Office (W911NF-23-1-0314).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.