
Abstract
How does industrial action influence automation? Literature claims that technology is used to disorganise workers. Employers are thought to introduce new automation technologies to disempower employees and frustrate strike action. However, there is mounting evidence that automation thrives in cooperative industrial relations. This article hypothesises that the connection between strike action and automation is conditioned by industrial relations institutions. It tests this claim using data for 14 European countries between 1992 and 2017. It finds no conclusive evidence that strike action directly predicts robotisation, but strong support to suggest this relationship is institutionally determined. Strike action correlates with automation in liberal industrial relations settings but slows the uptake of automation in more regulated and cooperative contexts. These findings suggest that in an era of accelerated technological change, greater attention to labour relations institutions is essential for understanding the conditions under which automation may unfold.
Introduction
During the Christmas holidays of 2019, strikes over President Emmanuel Macron’s pension reform brought all but two lines of the Parisian Metro system to a complete standstill. Because the two operational lines at the time were the only driverless ones, frustration among the people affected led 11,000 Parisians to sign a petition asking for full automation of the railway network. Three years later, operator RATP commenced the automation of a third line, predicting 70 per cent fewer delays. That same year across the English Channel, after weeks of industrial action, Royal Mail announced that it would cut some 6000 jobs in the United Kingdom, in a move towards a more capital-intensive service delivery. These cases raise a fundamental question about the political dynamics underlying the digital transition across knowledge economies. In a world in which technology seems to be increasingly capable of performing complex tasks, will employers turn to automation to sidestep conflict with their employees?
The literature has emphasised the importance of labour-replacing technological change in the process of class conflict (Marx, 1867). Neo-Marxist scholars in particular (Braverman, 1974; Marglin, 1974; Noble, 1984) have claimed that automation is not simply an innovation employers use to boost efficiency, but expressly a political tool aimed at keeping workers disorganised. Building on these arguments, Presidente (2020) similarly explained higher levels of robotisation in sunk-cost-intensive industries as an employer strategy aimed at diminishing workers’ leverage when it comes to making excessive wage demands in settings in which employers tend to be particularly vulnerable to hold-ups. Recent evidence also suggests that industrial action is indeed accountable for increased concentration of robots in some Chinese provinces (Liu and Zhang, 2023).
While this evidence is compelling, it raises an important empirical puzzle considering the wide variety of recent literature that emphasises how institutionalised cooperation between capital and labour accounts not only for higher rates of automation, but also for the social inclusivity of these innovations in cooperative industrial relations settings (Belloc et al., 2022; Gingrich et al., 2026; Jäger et al., 2021; Rigini, 1995; Van Overbeke, 2023). Indeed, a considerable literature in comparative political economy and labour relations has demonstrated a strong link between capital investment, particularly automation, in settings in which capital and labour cooperate through institutions such as works councils, union representation on boards and/or tripartite negotiations (Belloc et al., 2022; Dauth et al., 2017; Jäger et al., 2021; Van Overbeke, 2023). If industrial action predicts technological substitution, why do we see more automation and less technological unemployment in places where capital and labour cooperate more?
This article argues that the relations between industrial action and robotisation depend strongly on institutional context. In particular, the degree to which institutions confer power resources on employees should mediate the extent to which employers can aspire to disrupt protest through labour-saving technological change. Not only should we expect employers in more densely institutionalised settings to have less freedom unilaterally to impose new technologies on their employees, but innovation at firms operating under corporatist institutions has been shown to benefit from cooperation with their employees rather than from the perpetuation of conflict (Van Overbeke, 2023).
I test this hypothesis using data on the manufacturing industries of 14 European countries between 1992 and 2017. This article specifically pairs industrial robotisation data from the International Federation for Robotics (IFR), data on industrial action from the International Labour Organization (ILO) and institutional information from the Institutional Characteristics of Trade Unions, Wage Setting, State Intervention and Social Pacts (ICTWSS) to trace, through panel analysis, the effects of strikes on national and sectoral rates of robot density in different institutional settings. To the best of my knowledge, this is the first article to tackle this question in a comparative manner and to bring in the notion of institutional mediation, thereby extending the agenda put forward by Liu and Zhang (2023).
The article proceeds as follows. I first review the relevant literature on automation and industrial action, which I use to draw out the hypotheses at the heart of this article. Section 3 outlines the data and methodology. Section 4 presents the results of the analysis, while Sections 5 and 6 offer a brief discussion of the findings and conclude.
Literature and hypothesis
This section reviews the interdisciplinary debate on automation and industrial action before building on the political economy and industrial relations literature to theorise that this relationship is mediated by industrial relations institutions.
Automation is a highly contested development, both historically and across different societies. Literature in economics points out how in many wealthy democracies recent waves of labour-replacing technological change have hollowed out the middle of the skill distribution (Autor and Dorn, 2009; Dauth et al., 2017). This process of labour market polarisation has been credited with putting pressure on the labour share (Autor et al., 2017; Karabarnounis and Neiman, 2013; Kehrig and Vincent, 2018) and with eroding possibilities for social mobility (Berger and Enzell, 2022). While many scholars stress that – in the long run – automation may generate new activities and jobs (Acemoglu and Restrepo, 2018; Autor et al., 2021), such opportunities are far from guaranteed to benefit workers affected by this form of technical change in the short term.
These shifting economic opportunities have in the past been linked to industrial action (Mokyr, 2005; Mokyr et al., 2015). While the English Luddites have become eponymous for this phenomenon of (violent) anti-technology protest, economic history has consistently linked labour-replacing technological change with civil unrest. Molinder et al. (2021), for example, document a widespread pattern of strikes and riots in response to electrification in England. Caprettini and Voth (2020) similarly established a clear causal link between rural mechanisation and unrest, especially in areas whose inhabitants had previously faced diminishing life-chances as the consequence of enclosure.
However, technological change is not just an external driver of socio-economic and political change, but itself endogenous to social and institutional contexts (Acemoglu and Johnson, 2023; Braverman, 1974; Horn, 2008). Within debates on automation, one central question has therefore revolved around the relationship between automation and industrial action (Braverman, 1974; Liu and Zhang, 2023; Marglin, 1974; Presidente, 2020). In simple terms, does industrial action allow labour to weigh in on the introduction of firm-level technological development or are these technologies used to substitute and disorganise activist workers?
One side of the argument can be found in neo-Marxist industrial relations literature. The central idea is that automation is not simply a neutral technology employed to improve total factor productivity, but in fact primarily a political tool aimed at advancing capital’s interests in class conflict (Braverman, 1974; Marglin, 1974; Noble, 1984). According to this theory, strike activity should ‘invite’ further automation as employers seek to weaken labour’s position while securing stable production. Empirically, there is some direct and indirect evidence to support these claims. Studying Chinese industry, Liu and Zhang (2023) find a strong link between the regional concentration of strikes and the concentration of robots, suggesting that Chinese employers actively introduce robots to disorganise activist workers. Aside from this direct channel, evidence presented by Presidente (2020) suggests that employers could even automate pre-emptively when they are in a vulnerable position vis-à-vis workers. Comparing automation across industries they find that industrial robotisation is most prevalent in sunk-cost-intensive industries in which employers are especially vulnerable to labour hold ups.
This antagonistic view of the relationship between industrial relations and technological change is contested by scholars who claim that workplace cooperation can be a driver of inclusive technological change. Indeed, the literature across economics, political economy and industrial relations draws attention to the complementarities between the interests of employers and workers (Belloc, 2021; Belloc et al., 2022; Hall and Soskice, 2001; Hübler and Jirjahn, 2001; Jäger et al., 2022; Van Overbeke, 2023), as well as the importance of trust between these actors for innovations to succeed (Haipeter, 2020; Kochan and Tamir, 1989). This line of research has pointed to several empirical inconsistencies with antagonistic theories. On the one hand, stronger (not weaker) employee representation is found to predict higher investment in advanced technologies such as automation (Belloc et al., 2023; Hübler and Jirjahn, 2001; Jäger et al., 2021). On the other hand, these cooperative industrial relations settings have also been demonstrated to pair investment in automation with positive labour market outcomes for workers (Belloc et al., 2022, 2023; Van Overbeke, 2023). Using meso-level data, Van Overbeke (2023) demonstrates that robotisation in cooperative industrial relations settings is not associated with a decline in either the labour share or working hours. Studying German manufacturing, Dauth et al. (2017) similarly conclude that robotisation was not necessarily displacing for incumbent workers. Research by Belloc et al. (2022) suggests that this might be a result of lower risk job design in settings with strong employee representation, while Belloc et al. (2023) also find evidence that investment in advanced technologies is complemented by considerable retraining in these settings. One possible explanation for this surprising link between automation and positive outcomes for workers is that cooperative industrial relations institutions foster a long-term bargain with employers. Here, management procures crucial shop-floor information (Harvey, 1992), cooperation and investment in complementary skills (Hall and Soskice, 2001) to smoothen the introduction of new technologies, in exchange for job security and potentially productivity-linked wages.
I test the contrasting propositions set out in the literature using several hypotheses. First, I hypothesise that increased strike activity is associated with an uptick in robotisation. Strikes are a form of collective industrial action in which employees stop work in order to put pressure on employers and the state to meet their demands. While the number of strikes has generally declined across Europe in the past 20 years, this overall pattern obscures considerable variation (Vandaele, 2016). While factory-level strikes were a prominent tool in the social repertoire during the 1960s and 1970s (Dubois, 1978), the Continent has witnessed more frequent general one-day strikes in recent years. At the same time, there has also been a much higher level of industrial action in southern Europe than in the north (Vandaele, 2016). The literature emphasises that strike incidence is generally procyclical and driven by broader macroeconomic factors (Ashenfelter and Johnson, 1969; Card, 1990; Quaranta, 2015), as well as local grievances (Addison and Teixeira, 2016; Pulignano and Stewart, 2013). According to seminal theory, both local and macro-level causes of striking are fundamentally channelled through the logic of ‘joint cost of action’ which dictates that action is most likely where the costs are lowest (Belloc, 2021; Kennan and Wilson, 1989).
Whatever the cause, industrial action is highly costly to employers (Kennan, 1980; Tang and Ponak, 1985). Business generally seeks to avoid work stoppages because they lead to suboptimal utilisation of capital stock, missed deadlines and sales, and even potential damages. As experiences of such stoppages during the COVID-19 pandemic demonstrated, such events could incentivise businesses to seek out opportunities to stabilise output and avoid unnecessary costs by rethinking their reliance on labour. Going beyond a simple efficiency-led logic, (neo-)Marxist arguments stress the role of industrial action in conflict between employers and employees. As strikes are a highly visible manifestation of coordinated demands on behalf of labour, these accounts would predict that employers could resort to employing labour-replacing technological changes to disorganise workers.
However, the strategies employers use to manage industrial conflict are likely to be institutionally determined. The formal and informal rules that govern the workplace and, as a result, the relations between employers and employees, diverge substantially across countries (Haipeter et al., 2024; Hall and Soskice, 2001; Jäger et al., 2022). Industrial relations institutions differ particularly in the extent to which they provide power resources to employees through coordinating workers’ interests, setting minimum standards and institutionalising workers’ interests in company decision-making. These institutions matter for the relationship between industrial action and automation because they strongly determine the degrees of freedom employers have to implement new technologies on their own terms and the costs and benefits of doing so.
Labour’s institutionalised power resources can have both direct and indirect effects on employers’ willingness and ability to answer industrial action with automation. First, when workers hold significant power resources, employers are less able unilaterally to implement labour-replacing innovations. Both institutionalised co-determination rights and rules governing dismissals create direct barriers to retaliatory automation. The Belgian collective agreement (CAO) 39, for example, obligates employers to inform and consult with employees over the implementation of new technologies which have the potential to impact employment. In Germany the Mitbestimmungsgesetz (Co-determination Act) reserves two to three seats on the company supervisory board for union representatives, allowing for extensive oversight and co-determination over innovation. This comes on top of extensive firm-level works councils to supervise and discuss changes in the workplace. By contrast, the pre-eminence of the managerial prerogative (McKinlay and Zeitlin, 1989; Tomassetti, 2023) in other places, such as the United Kingdom, often limits employees’ ability to engage structurally with their employers on issues beyond employment and wages.
Second, in many deeply institutionalised industrial relations settings, firm productivity depends in large part on successful and iterated cooperation between employers and employees to ensure, among other things, investment and retention of specific skills, as well as to access intimate shop-floor information (Hall and Soskice, 2001). Within that context, many firms stand to benefit from managing industrial conflict in such a way as to ensure long-term social peace. While automation in general is not necessarily anathema to that goal (Van Overbeke, 2023), investing in these technologies to circumvent or punish workers for industrial action risks breaking trust with this crucial partner in the long term.
While the importance of these (neo-)corporatist institutions is waning in practice, these institutional differences remain important (Haipeter et al., 2024). There is substantial evidence to suggest that co-determination has come under pressure in recent decades (De Spiegelaere et al., 2022; Ebbinghaus and Weishaupt, 2023; Ellguth and Kohaut, 2022; Sick, 2020). Germany, for example, has witnessed a decline in the proportion of firms that maintain works councils and board-level representation (Ellguth and Kohaut, 2022; Sick, 2020). When these institutions are in place, practice demonstrates that works councils often receive information too late and/or are insufficiently consulted on changes (De Spiegelaere et al., 2022). Despite such erosion, I argue that these institutional differences in labour relations remain theoretically and empirically consequential. First, the (neo-)corporatist arrangements are most resilient precisely in the large firms that employ substantial shares of the workforce and that tend to be early adopters of advanced technologies (Nooteboom, 1994; Stiebale et al., 2024). Secondly, even where weakened, institutions of co-determination can still structure the long-term strategic environment in which employers operate. Firms that disregard established consultation procedures or seek to use automation to unsettle social peace risk provoking political and organisational demands for stronger oversight. In this sense, attenuated though they may be, labour relations institutions continue to mediate the relationship between industrial conflict and technological change by disciplining short-term opportunism and anchoring expectations about cooperative adjustment. I therefore hypothesise that the positive relationship between industrial action and robotisation is weaker where cooperative industrial relations institutions exist.
This paper therefore tests two hypotheses:
H1. Higher levels of industrial action are associated with higher levels of robotisation in subsequent years.
H2. The positive association between industrial action and robotisation is weaker in cooperative industrial relations settings.
Methodology
This article tests these claims using a quantitative approach based on panel-data. This type of analysis enables us to draw on both cross-sectional and longitudinal variation, allowing us to examine whether changes in automation intensity are associated with changes in strike activity within the same country sector, while accounting for unobserved differences across cases. While this approach inevitably blends out case-level details, its appeal lies in its ability to make more generalisable claims while remaining attentive to contextual differences across sectors and national settings.
Specifically, the following panel regression is proposed:

Where RD denotes robot density (that is, number of multipurpose industrial robots over 10,000 workers) in country c, sector s and year t.
The estimations rely on fixed effects using country, sector and year dummies. Both country and sector dummies are used because robotisation not only correlates with unobserved country-level factors but equally manifests a highly sector-specific dimension. A Hausman test indicates that there are systematic differences between random and fixed-effect models in this analysis, thereby rejecting the null hypothesis on equality between the two. The inclusion of fixed effects is thus warranted. Multicollinearity and heteroskedasticity are also tested for, both of which are absent. Standard errors are nevertheless clustered at the country-sector level.
To operationalise automation, this article follows the standard approach followed by much of the literature (Acemoglu and Restrepo, 2017; Liu and Zhang, 2023). This means that the prevalence of industrial automation is captured through a robot density measure, operationalised as the number of industrial robots per 10,000 workers. Industrial robots (following the ISO 8373 definition) are here defined as automatically controlled, reprogrammable multipurpose manipulators, programmable in three or more axes, which can be either fixed in place or fixed to a mobile platform use in automation applications in an industrial environment. Data for this construct come from the International Federation of Robotics (IFR) and the OECD’s Structural Analysis database (STAN). This indicator is constructed both at the level of manufacturing as a whole and for eight sub-sectors of the industry between 1993 and 2017.
While the International Federation of Robotics (IFR) is an excellent source of data for robotisation in manufacturing (Acemoglu and Restrepo, 2017; Graetz and Michaels, 2018) and therefore generally regarded as the standard source of data in the literature, it does have some notable limitations. First, the IFR provides only imperfect coverage, in terms of both time and space, for certain countries and regions. Second, the IFR accounts only for ‘multipurpose’ robots and therefore does not cover ‘dedicated’ automated controllers with a single industrial purpose. This definition also means that the data only cover manufacturing; services and the public sector are not part of the analysis. A final drawback of this dataset is that it leaves a portion of robots unallocated by industry. I therefore follow Acemoglu and Restrepo (2017), classifying these robots using the proportions observed in the classified data. Additionally, I follow Artuc et al. (2020) in constructing a stock of robots for every year-country-sector, assuming a depreciation rate of 10 per cent. Table 1 offers descriptive statistics for robot density by country and sector.
Summary statistics.

In contrast to robotisation, the operationalisation of strike activity is less straightforward, because data on comparative industrial action are known to be imperfect (Dribbusch and Vandaele, 2016). To maximise robustness I therefore use two different versions of the independent variable. First, and most straightforwardly, I operationalise strike action using the ILO’s measure of days ‘lost’ to industrial action per 1000 workers. As with robot density, this means that the indicator easily allows for the comparison of economies and industries of varying sizes. In comparison with the dependent variable, comparative data on strikes have some more limitations in terms of scope while also exhibiting some gaps. The ILO data are also not quite as granular, being provided only at the level of manufacturing as a whole. My second approach therefore takes inspiration from Liu and Zhang’s (2023) approach by using several versions of the independent variable. In addition to running a simplified version of regression (1) in which the level of analysis is specified at a country’s overall manufacturing, allowing for perfect matching of the strike and robotisation data, I use an approach in which strikes are repartitioned across industries by their employment level in order to achieve an imputed sector-level strike indicator. It is worth mentioning that this approach assumes that sectoral relative strike rates are distributed equally in any given country and year. While this assumption obviously does not hold in the real world, this approach works around existing data constraints to test, for the first time, the relationship between industrial action and automation across a larger sample of countries. When put into context with the country-level results, this strategy aims to maximise external validity within the constraints of data availability.
To test the hypothesised mediation effect of institutions, I interact the repartitioned strike independent variable with two existing institutional indices, as well as several variables capturing individual institutions. I first use the Jahn index (Jahn, 2016) and the cooperative index (Van Overbeke, 2023) to capture economy-wide representation of employees. Both instruments are time-invariant indices aimed at capturing the degree of corporatism in an economy. In Streeck and Kenworthy’s (2005) definition, corporatism is a mode of political and economic governance that seeks to organise group interests through intermediary institutions and coordinate these interests with the state. In such systems, employees therefore tend to possess strong power resources and enjoy comparatively significant representation in firm, sectoral and even national decision-making structures. I therefore use these two indicators because they represent a strong proxy for the institutionalised power of employees in the economy.
In addition to these compound indices, I also use three individual institutional indicators capturing sub-aspects of employee representation and power: union density, bargaining coverage and the rights of works councils. On the one hand, union density straightforwardly captures labour movements’ strength in numbers. In some countries, however, labour movements exert significant influence even if their membership is not particularly deep. Bargaining coverage therefore reflects the reach of the bargains unions strike across the labour market. At the same time, introducing the rights of works councils gives us some idea of labour’s influence over firm-level developments. Labour power is hard to capture but these three variables enable us to observe important aspects of the phenomenon as related to robotisation. These variables are all taken from the Institutional Characteristics of Trade Unions, Wage Setting, State Intervention and Social Pacts (ICTWSS) database, which collects both national and sectoral information on unions, industrial relations institutions and bargaining across the OECD and several non-OECD countries.
The analysis relies on several sectoral and country-level control variables. First of all, at the sectoral level, this analysis controls for labour costs, measured as the average cost of an hour of labour in a given country sector. The second control variable is the price of capital as measured by the price of capital formation, which is found in the Penn world tables dataset. Put together these variables control for the variation we can expect to see in factor costs across countries and industries. To account for the benefits of scale I also control for output. All of the aforementioned variables are expressed in 2016 US dollars. Further control is included for the proportion of value added as part of total output per sector. At national level, I also control for a country’s proportion of 15–64 year olds to check for demographic differences, which might influence automation by affecting the labour supply (Acemoglu and Restrepo, 2018).
These controls are supplemented with further robustness tests. First, I test the sensitivity to the one-year lag included in my models by rerunning several estimations without lags and with a two-, three- and four-year lag. Additionally, the results are tested for the model specification by replacing the preferred fixed effects with a mixed-effects model in which sectors are nested in countries. To exclude the specific influence of key outliers on both the dependent and independent variables, the main regressions are also rerun excluding the automotive and the plastics and chemicals sectors, which are the industries in the sample with the most robots and strikes, respectively. I test the sensitivity of the sample even further with bootstrap and jackknife testing. Finally, the models’ sensitivity to reverse causality are thoroughly tested in two ways. To do so, I rerun the baseline regressions, switching around the main independent variable and dependent variable. On top of this, I also run a generalised difference-in-difference (DiD) model in which I define a binary variable which takes the value of 1 when the number of days lost to industrial action is equal to or above one standard deviation above the country mean.
Results
This article hypothesises that industrial action is associated with higher levels of robotisation, but that this relationship is conditioned by formalised cooperation between employers and employees in corporatist institutions. The first question we must answer therefore is whether there is a simple, unmediated relationship between strike action and industrial automation. Table 2 presents the main findings in an effort to answer that question. It reports four models, two of which estimate regressions at the national level, where the main independent variable is the absolute number of days lost to strikes per 1000 employees (log), while the other two present sectoral-level analysis, where this variable is decomposed following Liu and Zhang (2023). Models 1 and 2 estimate a linear relationship between robot density and industrial action, while models 3 and 4 include a quadratic term. All models include controls, year, country and sector fixed effects.
Baseline results.
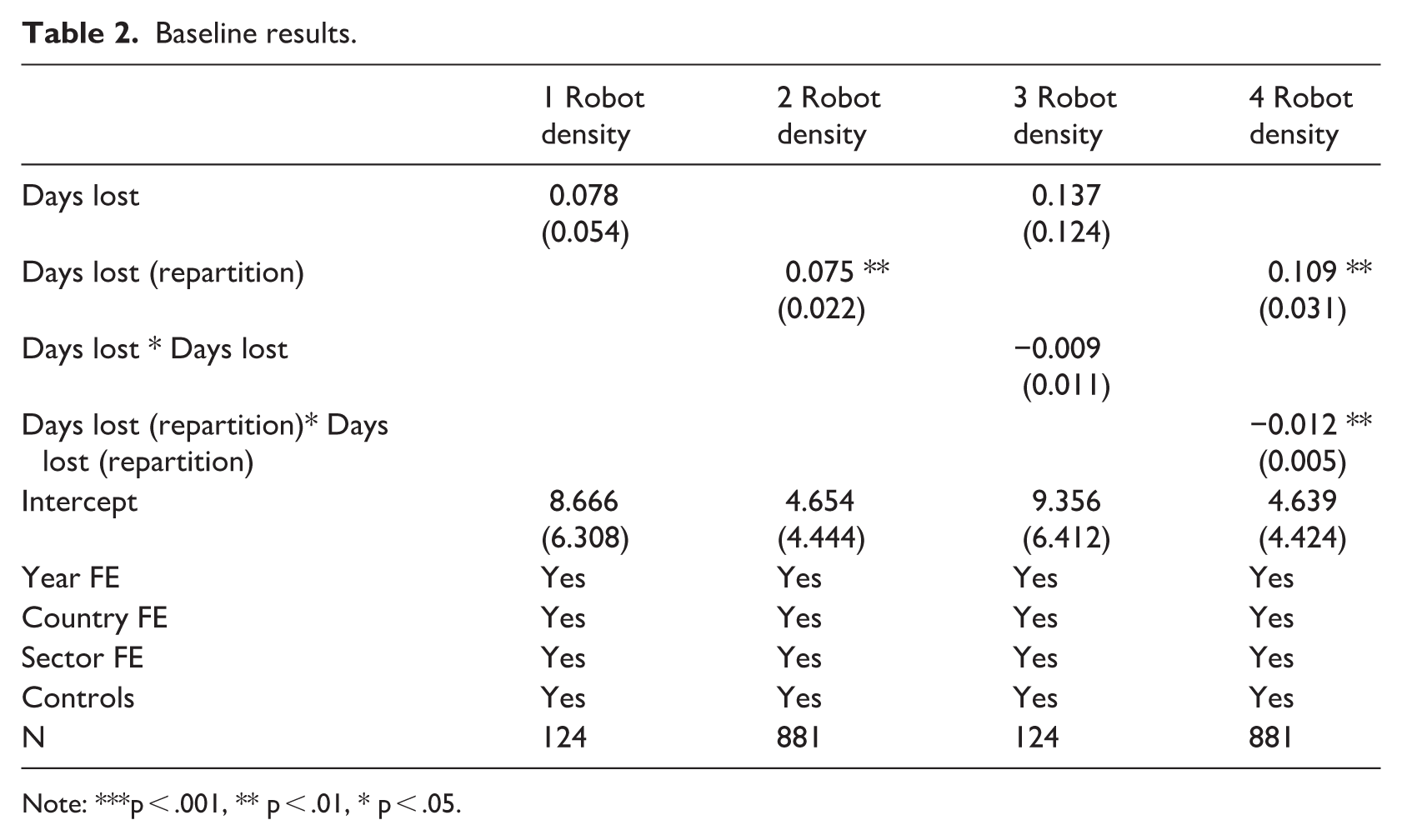
Note: ***p < .001, ** p < .01, * p < .05.
While broadly consistent across specifications, the findings in Table 2 offer mixed evidence to support the proposition that there is an association between strike activity and industrial robotisation. The estimates of the first two baseline regressions at the country and sectoral level suggest that a 1 per cent increase in days lost per 1000 employees predicts roughly a 0.075–0.078 per cent increase in robot density. The estimates at the country level are not significant, however, which calls into question the robustness of the findings. The predicted effect is also rather small. Putting it into context, this means that 1 standard deviation increase in strike activity would predict around a 0.25 per cent uptick in robotisation. While this is non-negligible, it is far from the strong effect predicted in some parts of the literature.
Columns 3 and 4 give us a deeper insight into the effects of strike action on robotisation by modelling a non-linear association. Here, again, the point estimates are quite consistent across the two specifications, though the national-level regression again comes out as insignificant. The main insight from these estimates is that the marginal effect of increased industrial action on robotisation is much stronger at lower levels of industrial action. As can be observed from Figure 1 (which plots the margins based on model 4), annualised strike activity of all degrees predicts increased robotisation. However, the marginal effect of industrial action tapers off significantly, the more annual strike activity there is. This seems to suggest that employers are more sensitive to industrial action when strikes are relatively small but become increasingly unwilling to further invest in robotisation in highly volatile settings. There could be several explanations for this phenomenon. For one thing, it is plausible that industries at the upper tail of the strike distribution hit the intensive productivity margin on the short-term introduction of robotisation and therefore decide not to scale up their automation investment in proportion to the strike activity they face. Secondly, automation could also simply be used as a warning shot to workers. If so, relatively smaller investments in robots could be seen as a more cost-efficient way to convey the message in periods of social conflict, irrespective of the scale of the industrial conflict.

Margins plot of non-linear relation between strike action and industrial robotisation.
To conclude, the baseline findings offer mixed support for the first hypothesis. While small, the estimated effects are fairly credible and consistent across the different specifications. It is not possible to infer causality, let alone to determine the exact mechanisms at play, but these findings echo the conclusion by Liu and Zhang (2023) that robotisation could in some small part be related to industrial action in Europe. It is worth mentioning that alternative specifications used in robustness testing, where the main independent variable is transformed into a binary variable capturing years with high volumes of strike activity, did produce significant results, even at the national level. Still, the fact that the main specifications proposed in this study did not reach that threshold warrants some caution.
Having tested the basic association between robotisation and strike action, we now turn to the hypothesised mediation effect of labour relations institutions. I suggested that it was plausible that the rate at which industrial robots are introduced following strikes depends on workers’ institutionalised power. To test this hypothesis, I interact strikes with two existing indices and three specific indicators of institutionalised power resources: union density, the level of wage coordination and the rights of works councils. Union density here represents union’s numerical strength, while the level of wage coordination and the rights of works councils proxy union influence by looking at the concrete power resources they hold over wage setting and firm-level decisions.
Table 3 reports the results of this analysis. At a general level, the findings strongly confirm the idea that institutions mediate the link between industrial action and automation. First, the main effect of the number of days lost to industrial action is consistently highly significant while the coefficients are substantially larger than in the baseline analysis. This indicates that there is an especially salient association between strikes and robotisation in liberal market regimes, where employees hold little to no institutional power resources. In contrast, the significance of the interaction terms of both institutional indicators demonstrate how the effects of strike action on robotisation quickly taper off in countries such as Austria, Belgium, Germany and Sweden, where labour actively participates in decision-making at various levels of the economy.
Interaction effect of industrial relations institutions and strike action on industrial robotisation.

Note: ***p < .001, ** p < .01, * p < .05.
These general conclusions are especially clear when we consider the results for the two institutional indices in columns 1 and 2 alone. First, the interaction results strongly indicate that more highly corporatist regimes, which empower employees as social partners alongside employers, should expect much lower and even falling levels of automation because of industrial action. The operationalisation of these two indicators is slightly different, making direct comparison tricky, but they suggest that moving from a highly (economic) liberal to a deeply institutionalised context is associated with a −0.24 per cent to a −0.36 per cent decrease in the uptick of automation predicted by every 1 per cent increase in industrial action.
Second, the main effect of the Jahn index is not significant but strong significance of the Cooperative index falls squarely in line with previous findings. This highlights the importance of cooperation and social dialogue for automation (Van Overbeke, 2023). This indicates that automation thrives in particular in corporatist regimes, in which employees and employers need to work together, under conditions of social peace. In fact, the magnitude of the interaction effects suggests that investment in automation actively slows down when these systems experience acute breakdowns of social peace in the form of high strike activity.
Figures 2 and 3 give an even better insight into the mediating role of corporatism. They plot the predicted margins for observations scoring high and low on the Jahn and Cooperative index for varying degrees of industrial action. Here it becomes clear that robot density is predicted to rise significantly as the number of days lost to strikes rises in liberal regimes, but not at all in settings in which workers have significant power resources. Figures 4 and 5 subsequently plot the predicted effect of the main independent variable on robot density over the two institutional indicators. The strong downward slope on both graphs again indicates how the positive relationship between strike action and robotisation is strongest in liberal labour markets and how the model ceases to predict robotisation in the most highly corporatist economies. These figures therefore strongly confirm the idea that the (neo-)Marxist link between strike action and automation is at best conditional on the industrial relations setting.

Predicted margins of days lost per 1000 workers by levels of the Jahn index.
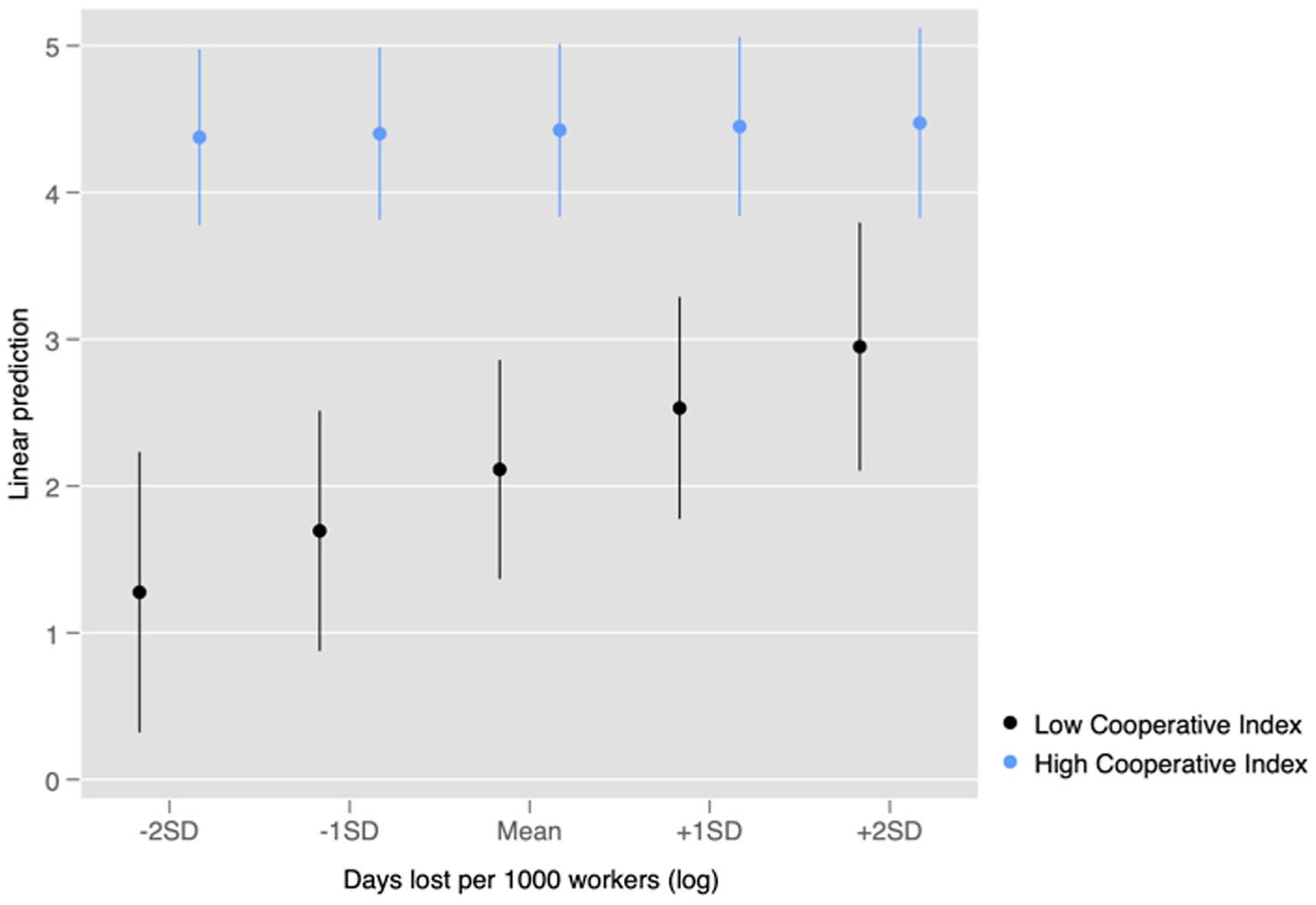
Predicted margin of days lost per 1000 workers by levels of the Cooperative index.
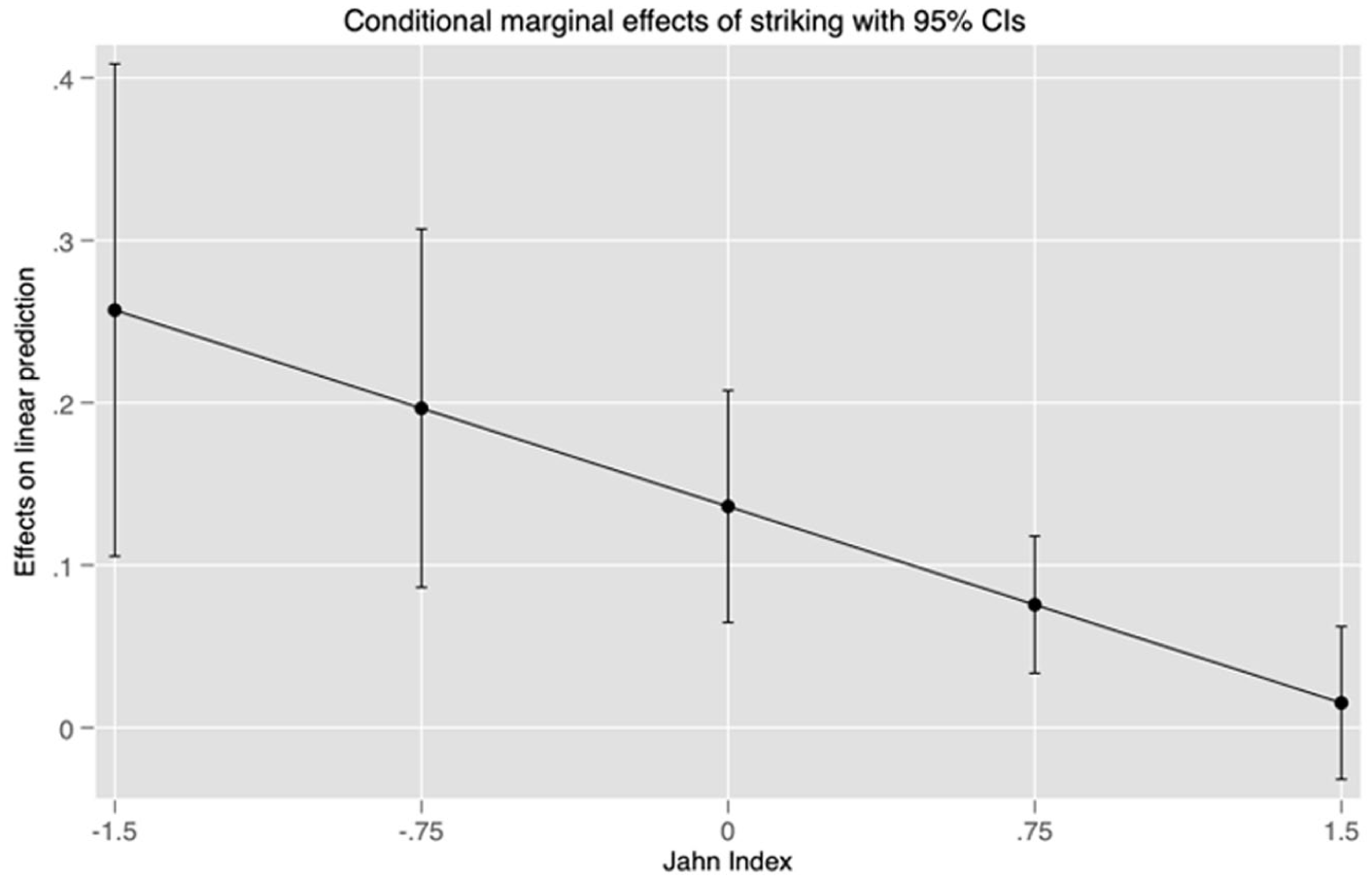
Predicted effect of days lost per 1000 workers on robot density by levels of the Jahn index.

Predicted effect of days lost per 1000 workers on robot density by levels of the Cooperative index.
Similar conclusions emerge when we zoom in on the estimates about specific institutions, in columns 3 to 5 of Table 3. The main effect of industrial action is highly significant across the specification with union density, works councils and wage coordination. The estimates predict a 0.2 to 0.38 per cent increase in robotisation associated with a 1 per cent increase in the relative days lost to strike action in the absence of these key institutions. However, this strong association is fully absorbed in more deeply institutionalised settings. First, the difference between a labour market without unionisation and a fully unionised labour market is predicted to be around −0.27 percent for every 1 per cent increase in robotisation. While it is worth pointing out that neither of these extreme scenarios are observed in the dataset, it nevertheless paints a stark picture of the important role collective employee representation plays in mediating the link between strike action and automation in advanced industrial societies. Among these three institutions, works councils show the smallest interaction effect while wage coordination has the largest interaction effect.
Finally, Figure 6 explores differences by sector, looking at the predicted values of automation derived from the panel analysis (model 1, Table 3) across the different industries. In line with descriptive evidence from the International Federation for Robotics, we can observe that automation is most strongly predicted in highly capital-intensive sectors, such as automotive, machinery, and plastics and chemicals. It is important to note that the goal of this article is to understand the heterogenous effects of institutions, holding other factors, such as sectors, constant. The variation shown therefore reflects differences in sectoral intercepts rather than heterogeneous effects of corporatism or strike activity across sectors. Figure 6 thus provides a descriptive benchmark of how automation intensity differs across sectors.

Predicted variation in automation activity by sector.
Discussion and conclusions
(Neo-)Marxist scholars (Braverman, 1974; Noble, 1984) have long considered automation a key tool for disorganising labour. Recent evidence on the link between strikes and robotisation in China offers some empirical support for this idea, even in nominally socialist settings (Liu and Zhang, 2023). This article thus tries to understand how industrial action influences robotisation across the OECD, and specifically what the role of industrial relations institutions and labour power is in that equation. I hypothesised that the link between strikes and automation would be intermediated by the extent of labour’s institutionalised power resources. When workers hold more power, employers should have fewer degrees of freedom to retaliate against industrial action and more reasons to cooperate in the long term.
Building on data from the International Federation for Robotics (IFR) and the International Labour Organization (ILO), the analysis here offers only mixed evidence to support the idea that there is a direct association between strike activity and robotisation across European manufacturing industry. The estimates on the first hypothesis were fairly consistent but the national-level regressions proved insignificant. While this is probably explained partly by the limited sample size and does not exclude the possibility of significant regional and sectoral variation, it nevertheless calls into question the basic proposition that strike action is directly related to automation in these economies. In contrast, this article did find strong support for the notion that the association between industrial action and robotisation is conditioned on employees’ institutional power in countries such as Austria, Belgium or Germany, where employees enjoy such significant power resources as partial co-determination rights. Put differently, we can expect more automation following significant industrial action, but only in highly liberal settings where managerial prerogatives are strongest. While we argue that the link between strike action and automation is institutionally determined, our findings are therefore in line with those of Liu and Zhang (2023), as prior work on Chinese political economy has shown how its industrial relations system has strong similarities with liberal Western models (Friedman, 2014; Lee, 2007).
This empirical insight significantly adds to our understanding of existing debates on the influence of industrial relations on automation (Belloc et al., 2022; Presidente, 2020; Van Overbeke, 2023). In fact, the findings seem to suggest there are two different equilibria to be found across the OECD; one built around conflict and another around cooperation. In line with Marxist arguments (Braverman, 1974; Noble, 1984; Presidente, 2020), the strong and consistent main effect of industrial action across the interaction models points in the direction of a retaliatory model of automation, where robots are introduced to disorganise workers and disincentivise future industrial action in (economic) liberal settings. Conversely, the strongly negative interaction coefficients across the various indices and institutions considered indicates that social peace is a prerequisite for the development of automation in corporatist settings in which workers hold significant power resources.
While this article does not investigate the effects of robotisation on productivity growth, the social utility of retaliatory automation in some economies warrants further investigation, considering earlier contributions on ‘so-so technologies’ (Acemoglu and Restrepo, 2019). ‘So-so technologies’ refer to automation technologies that substitute labour for tasks in which capital is not (much) more efficient. Because these innovations effectively represent a blunt transfer from labour to capital without substantial productivity gains, they are usually seen as a socially corrosive source of inequality. In as far as robotisation is in fact introduced into industries as a retaliatory measure to punish or even break labour opposition, it is plausible that these forms of capital investment represent a similarly blunt form of factor substitution that does not yield much in the way of productivity growth.
It is worth mentioning that there are some significant limitations to this study. The most notable shortcoming of the analysis concerns the quality and granularity of the data. In an ideal world we would be able to examine the link between automation and strikes at the firm level across all sectors. However, not only is such detailed information on robotisation or strikes not available, but the quality of existing industrial action data differs significantly across cases (Dribbusch and Vandaele, 2016), and instances of strike action probably exceed official estimates. At the same time, the focus on robotisation also probably underestimates processes of automation as a whole. While robots present a discrete and therefore easy to quantify proxy of automation, they represent only part of this broader technological process. Additionally, the available IFR data allow us to examine only industry, leaving a large part of the economy unexplored. All in all, this means that there are both limitations on the generalisability of our findings and significant opportunities for further research.
While it is important to keep these limitations in mind, it is also worth reiterating that the interaction estimates reported in the study are highly consistent across the various model specifications. The conclusions from the baseline specifications were generally confirmed using various lags, jackknife and bootstrap tests, an alternative mixed-effects specification and the exclusion of sectors that could be considered outliers. In addition, the generalised DiD and reversed regression both alleviated reasonable concerns regarding reverse causality.
To conclude, this article analyses the relationship between strike action and industrial automation across the OECD. By combining existing data in new ways, it was able to demonstrate that this hypothesised link is strongly mediated by institutionalised labour power. This insight offers a differentiated picture of previous debates on the role of technology in labour relations and thus calls for further research and more data.
Supplemental Material
sj-pdf-1-trs-10.1177_10242589261432618 – Supplemental material for The robots strike back? Industrial action, automation and the mediating role of institutions in Europe
Supplemental material, sj-pdf-1-trs-10.1177_10242589261432618 for The robots strike back? Industrial action, automation and the mediating role of institutions in Europe by Toon Van Overbeke in Transfer: European Review of Labour and Research
Footnotes
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.