
Abstract
A kind of PZT/polymer gripper is proposed in this paper and its nonlinear dynamic response in bounded noise is described. In this paper, a polymer piezoelectric material is applied in gripper to substitute the traditional PZT to improve the response range. Nonlinear differential items are introduced to interpret the hysteretic phenomena of the PZT/polymer piezoelectric composites material, and the nonlinear dynamic model of the PZT/polymer gripper in bounded noise is developed. The dynamic response of the system is obtained, and the bifurcation characteristics of the system are analyzed. The results of numerical simulation and experiments show that the stochastic noise intensity has important influence on the system's dynamical response, and the stochastic resonance phenomenon occurs with the stochastic noise intensity variety.
Introduction
Gripper is a basic kind of mechanical structure and used widely in industries of electronics, information technology, optics, medicine, and bio-technology. The specifications to realize such a gripper is to obtain quasi-static motion to have high accuracy in positioning, a large-stroke actuator to grasp the maximum types of object, and the use of electrostatic forces in order to avoid high power consumption.
Piezoelectric ceramics is a kind of smart material. It can be used to convert mechanical energy or electrical energy into another. But the hard and brittle characteristics make it difficult for forming process. It has bad shock resistance which restricts its application. Polymers as matrix materials offer several advantages, such as good electric insulation, high dielectric breakdown strength, low mechanical brittleness, and flexible manufacturability into complex shapes1–2. Composite PZT and polymer materials, can overcome the shortcomings of the two, obtain low brittleness, low density and low dielectric coefficient, simple manufacturing process and low cost.
Many scholars have studied PZT/polymer piezoelectric composites materials. A kind of high-sensitivity passive magnetic transducer based on PZT plates and a Fe-Ni fork substrate was designed 3 . The connectivity of the ferroelectric phase in a composite microstructure plays a critical role in composite design and optimization 4 . PZT ceramics and their compositionally modified variants with soft and hard dopants, all having an MPB composition, have been exploited in many sensor and transducer applications 5 . Owing to its tailorable properties, a lot of research work have been carried out recently to investigate the effect of various parameters, namely ceramic/matrix type 6 and ceramic-polymer interface7–8, in order to enhance the dielectric and piezoelectric properties of composites. This growing interest have opened up doors for a wide range of potential applications of piezoelectric composites9–11.
Although much progress has been obtained, the theoretical results of the dynamic characteristics of PZT/polymer gripper are limited. Duo to the hysteretic nonlinear characteristics of PZT/polymer piezoelectric composites materials, PZT/polymer gripper has complex nonlinear dynamic characteristics, which cause the difficulty to control. In this current paper we aim to provide a kind of method to solve the nonlinear dynamical characteristics of PZT/polymer gripper.
Hysteresis Nonlinear Model of Pzt/Polymer Gripper
The strain-stress curves of PZT/polymer piezoelectric composites materials are shown in

Strain-stress curves of PZT/polymer piezoelectric composites materials
In this paper, the Van der Pol hysteretic model used to describe the strain-stress curves is developed as follows:

Partial least-square regression method is used to test the fitting effect of Eq. (1). The analyze result of principal component based on experimental data is shown in
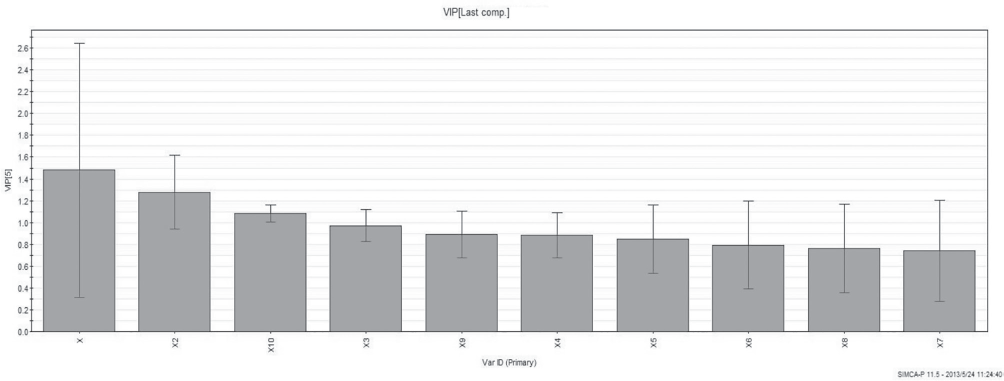
Analysis result of principal component
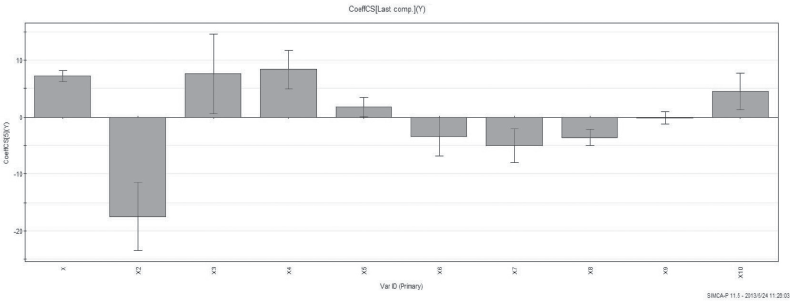
Values of the coefficients
The result of forecast test to Eq. (1) is shown in

Results of forecast test
The structure of PZT/polymer gripper is shown in

The structure of PZT/polymer gripper
According to Hamilton's principle, we obtained:

The constitutive model of PZT/polymer piezoelectric composites materials can be shown as follows:

Let u(x, t) = ψ(x) y(t), the dynamic equation of piezoelectric cantilever beam subjected to axial stochastic excitation can be solved from Eq. (2) as follows:

If we let p = y A cos(


The averaged Fokker-Planck-Kolmogolov (FPK) equation on the probability density f = f (A, Δ’, t) is as follows:




The numerical results of the system response are presented in

The probability density when σ = 0.1

The probability density when σ = 0.4

The probability density when σ = 0.8
From
From
From
Above all, we can obtain a conclusion as follows: the system will be stable when the stochastic noise intensity is weak; with the stochastic noise intensity increasing, the stable state of the system breaks and the instability is increasing; with the stochastic noise intensity further increasing, the stable state of the system enhances a little and the instability decreases. This phenomenon is called stochastic resonance phenomenon.
The experimental results of the gripper are shown in
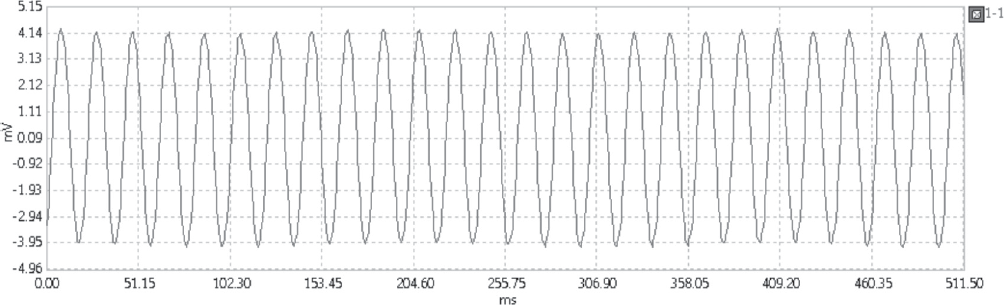
Response of the gripper when σ = 0.1

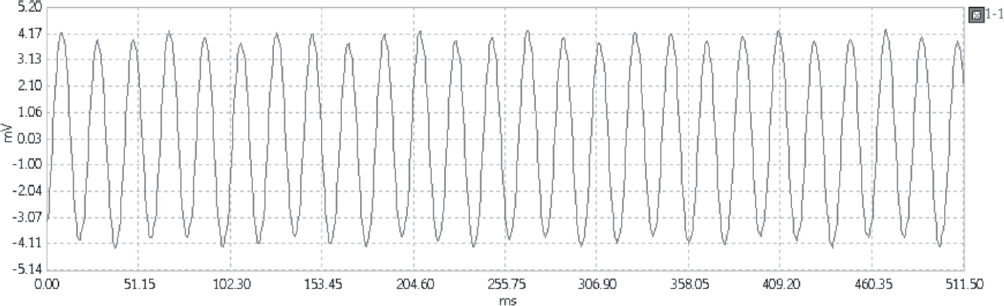
Response of the gripper when σ = 0.4
Response of the gripper when σ = 0.8
A kind of PZT/polymer gripper is proposed in this paper and its nonlinear dynamic response in bounded noise magnetic fields is described. The results of numerical simulation and experiments show that the stochastic noise intensity has important influence on the system's dynamical response, and the stochastic resonance phenomenon occurs with the stochastic noise intensity variety. This phenomenon can increase the amplitude of system flutter and reduce the movement accuracy of the gripper.
Footnotes
Acknowledgment
The authors gratefully acknowledge the support of the Tianjin Research Program of Application Foundation and Advanced Technology through Grant No. 16JCYBJC18800.