
Abstract
Driven by the need for remaining useful life prediction of degraded motor systems with feedback controllers, a real-time updated Wiener stochastic process is adopted to model the performance degradation of motor systems. First, a closed-loop performance index of the motor system is derived incorporating the multiple slow time-varying characteristic of motor parameters. On this basis, the drift coefficient and diffusion coefficient of the Wiener degradation model are updated to obtain the prior maximum likelihood function with available historical data. It is followed by the iterative optimization of nonlinear feature parameter in the Wiener degradation model with taking the prior maximum likelihood function as the cost equation. The effectiveness of proposed remaining useful life prediction architecture for closed-loop motor systems is demonstrated by motor systems.
Keywords
Introduction
Motors are widely used in modern industrial control systems, as well as key drivers to ensure safe operation in industrial processes.1–5 But physical structures of motors are prone to damage due to the fact that most of the equipment often operate in harsh working environments. It is necessary to monitor the operational status of motor systems to prevent serious degradation of the performance. 6 However, the system error will fluctuate in a small allowable range owing to the feedback controller during the early even the middle stage of the motor performance degradation. 7 Once the obvious change is detected at the later stage of degradation, only extreme ways such as shutdown and replacement can be adopted. In a ward, it is of importance to realize the remaining useful life (RUL) prediction of motor systems in the early stage of degradation for the purpose that subsequent predictive maintenance policy can be taken in time to reduce the economic loss.
The main idea of the RUL prediction is to determine the distribution or expectation of the RUL according to the effective information such as failure mechanism and failure data. 8 At present, a lot of investigations aim at the degradation of mechanical components in open-loop systems, for instance, Li-ion batteries, 9 rolling bearings,10,11 and so on. However, the impact of degraded components can be partially compensated by feedback controller in closed-loop systems. Nguyen et al.12,13 described the performance degradation process of the closed-loop system as a stochastic shock process with the assumption that the degradation of the actuator can be directly measured. But the performance of systems with feedback controllers cannot generally be reflected in a measurable physical quantity. Considering the above problem, Si et al. 14 put forward a prediction algorithm to predict one degradation parameter which can indicate the degradation of the closed-loop system performance to obtain the RUL prediction by simulating future states of the system. Nevertheless, there are always multiple slow time-varying parameters during the operation of motor systems in practice.15,16 The prediction result will be inaccurate if the RUL is calculated through fitting of the degradation path by only one parameter. Therefore, it is necessary to calculate a comprehensive performance index which can accurately characterize the degradation of the closed-loop motor system with multiple slow time-varying parameters.
At present, data-driven methods, especially Wiener stochastic process, are widely used to predict the RUL due to its probabilistic framework with the inverse Gaussian distribution. In recent research, it is worth noting that a nonlinear-drifted diffusion process with a constant threshold was transformed to a linear model with a corresponding variable threshold for the purpose of obtaining the probability density function (PDF) of the RUL. 17 In addition, multiple-dimensional search algorithm with the full life cycle data was adopted to estimate parameters offline, which requires considerable time inevitably if suitable initial values were not set in advance. 18 Furthermore, it is difficult to obtain the full life cycle data for majority of industrial processes. Compared with the offline training of model parameters, an RUL algorithm was proposed to online estimate parameters of the degradation model in combination with the Kalman filter. 19 But the posterior estimation of parameters may be affected by the two-stage degradation process which needs to re-estimate the rapidly changing degradation rate. In view of this degradation characteristic, the powerful random global search capability of particle swarm optimization (PSO) algorithm is very helpful for the multi-stage degradation modeling. 20 However, estimating all parameters simultaneously is time-consuming which will result in delayed prediction. Therefore, how to online estimate parameters of the degradation model accurately and quickly when there are only the historical data to date is a practical issue.
In this article, an iteratively updated RUL prediction algorithm for closed-loop motor systems with multiple slow time-varying parameters is proposed. For the purpose of constructing a performance index, an extended state observer (ESO) is designed to estimate the augmented degradation state related to degradation when multiple parameters are slowly time-varying. Due to the lack of the full life cycle information, PSO algorithm is taken into account to online optimize the parameter reflecting nonlinear characteristic only by the historical performance index to date, and then expectation maximization (EM) algorithm and Bayes theorem are integrated to update other parameters. The contributions are as follows:
A comprehensive performance index of the degraded closed-loop motor system is constructed in the presence of multiple slow time-varying parameters, based on which the degradation model can be established closed to the actual degradation trajectory.
A two-step fusion algorithm for parameters of the nonlinear Wiener degradation model is designed to iteratively update the PDF only by the available historical data, which contributes to promoting the accuracy of RUL prediction.
This article is organized as follows. In section “Problem formulation,” the problem formulation is introduced. Section “Construction of the performance index” is dedicated to the design of ESO and approximates the calculation of the performance index. Section “Prediction of the performance index” deals with the iteratively updated process of the nonlinear degradation model, and then the PDF of the RUL is obtained. The architecture is summarized in section “RUL prediction architecture for the closed-loop motor system.” Finally, case studies on motor benchmarks are presented, and the validity of proposed approach is discussed in section “Case study on DC motor.”
Problem formulation
In this article, a simplified continuous-time state space expression of the direct current (DC) motor composed of the mechanical motion equation and the voltage equation expressed by equation (1) is considered.21,22 To begin with, the schematic diagram of the DC motor is shown in Figure 1

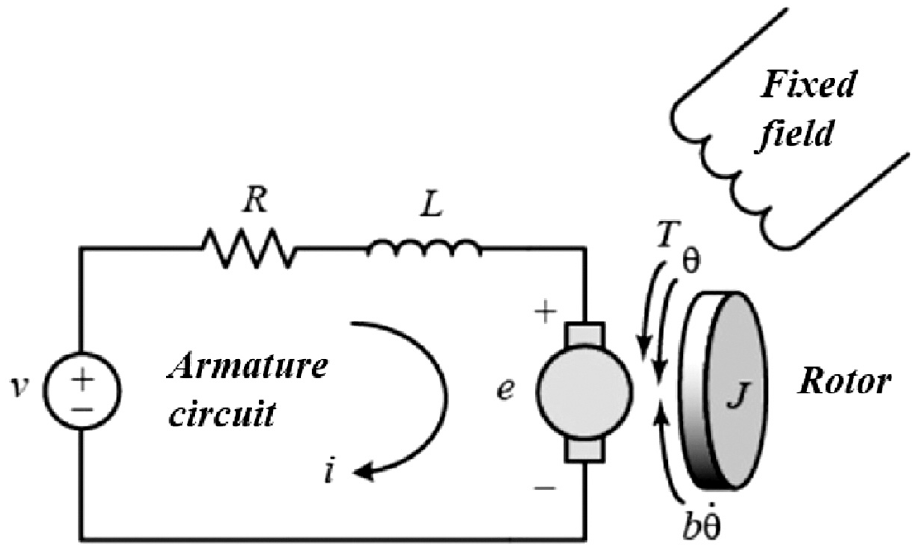
DC motor structure and schematic chart.
where
Proportional–integral–derivative (PID) controller is used due to its widely existence in practical industrial control systems. The measurement of the degraded system will not change significantly because of the feedback controller, so that the RUL prediction algorithm for static systems without the closed-loop controller is not applicable to closed-loop control systems. The PDF of the RUL can be obtained indirectly by predicting the degradation trajectory of the parameter if only one parameter changes. In practice, the degradation of motor performance is often reflected in multiple slow time-varying electrical parameters, such as the armature resistance
In this event, it is not available to estimate and predict all time-varying parameters. One of the reasons is that it is unable to obtain the actual number of time-varying parameters and corresponding thresholds. The other is that the weight of each time-varying parameter in judging the degree of system performance degradation cannot be obtained. In this issue, it is primary to clarify exactly the architecture of the performance degradation prediction algorithm for the closed-loop motor system. It is followed by the construction of the index to describe the performance degradation of the closed-loop motor system under the condition of the unknown load torque and the slow time-varying parameters. On the basis of the index, the ultimate objective of this article is to compute the PDF of the RUL based on the establishing iterative degradation model of the performance index due to the inability to obtain full life cycle data.
Construction of the performance index
In this section, an ESO algorithm is designed to estimate the degradation information, and then a performance index is established for the subsequent prediction process.
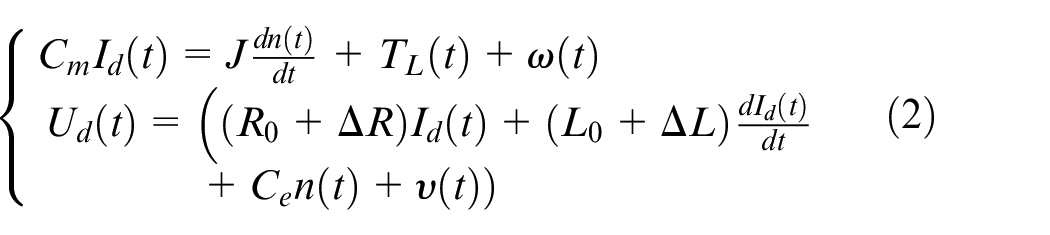
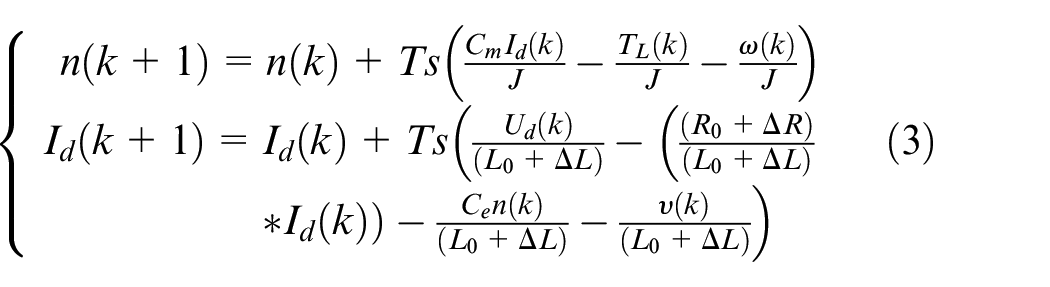
To facilitate the calculation in the prediction process, we approximately discretize the system model (1) with multiple slow time-varying parameters by the Euler discretization method. We rewrite equation (1) as follows
where
We rearrange equation (3) as

with
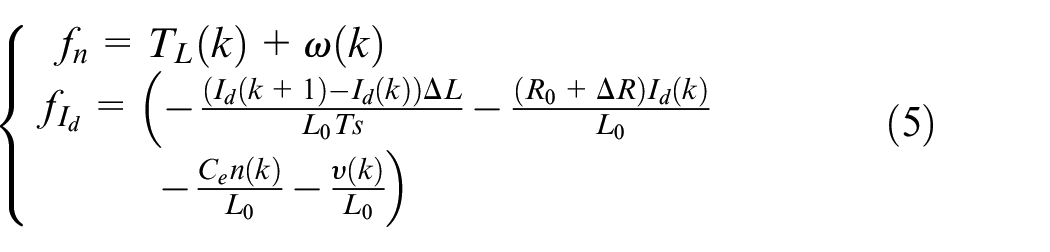
where
ESO is often taken into account to estimate unknown terms and disturbances in motor systems.23,24 An ESO is designed for the mechanical motion equation and the voltage equation as follows
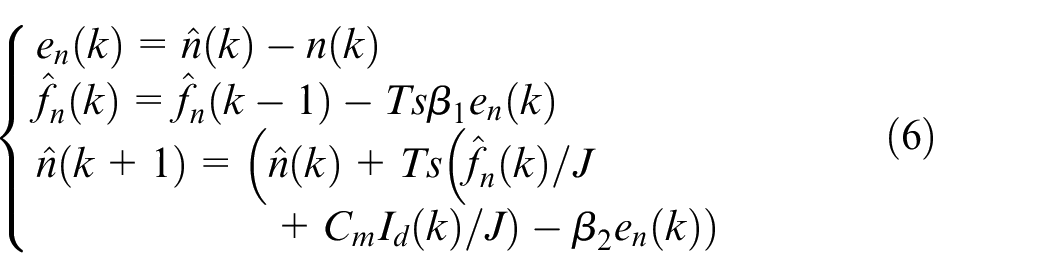
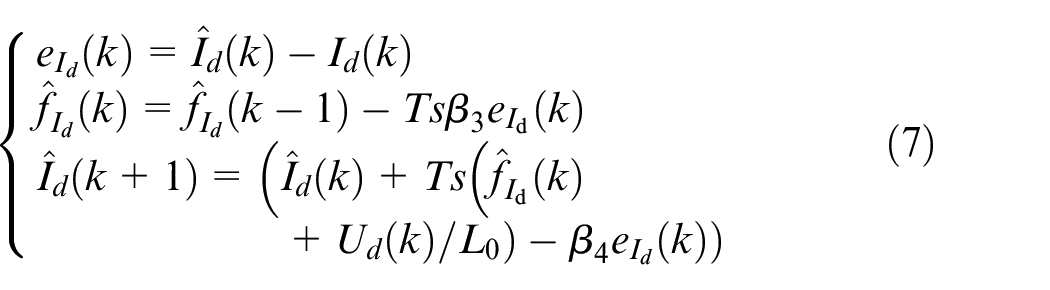
where

By calculating the pole position, the discrete ESO stability condition is 25

When the discrete ESO gains satisfy equation (9), the estimated ESO converges to the true value. The estimated load and the performance index can be obtained, respectively, from equations (6) and (7). To be noted, this article only studies the method of establishing performance index when multiple parameters in the voltage equation degrade, which often occurs in practice. Similarly, the degradation in the mechanical equation can be transformed into a similar performance index through the state variable of the current. The performance index is derived as equation (10)
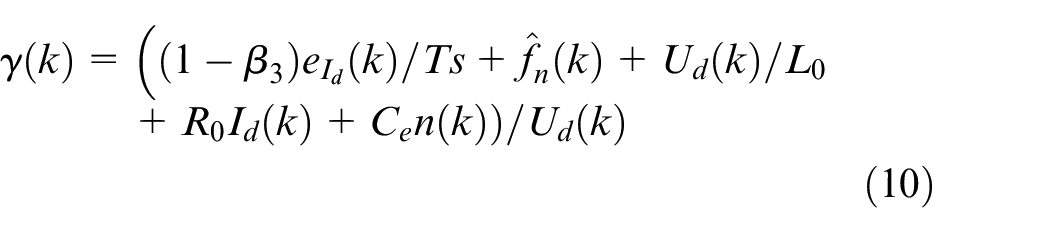
where
Prediction of the performance index
In this section, the PDF of the RUL will be obtained by a nonlinear Wiener process. It is followed by iteratively updated parameters of degradation model, which can be derived by integrating PSO algorithm, EM algorithm, and Bayes theorem.
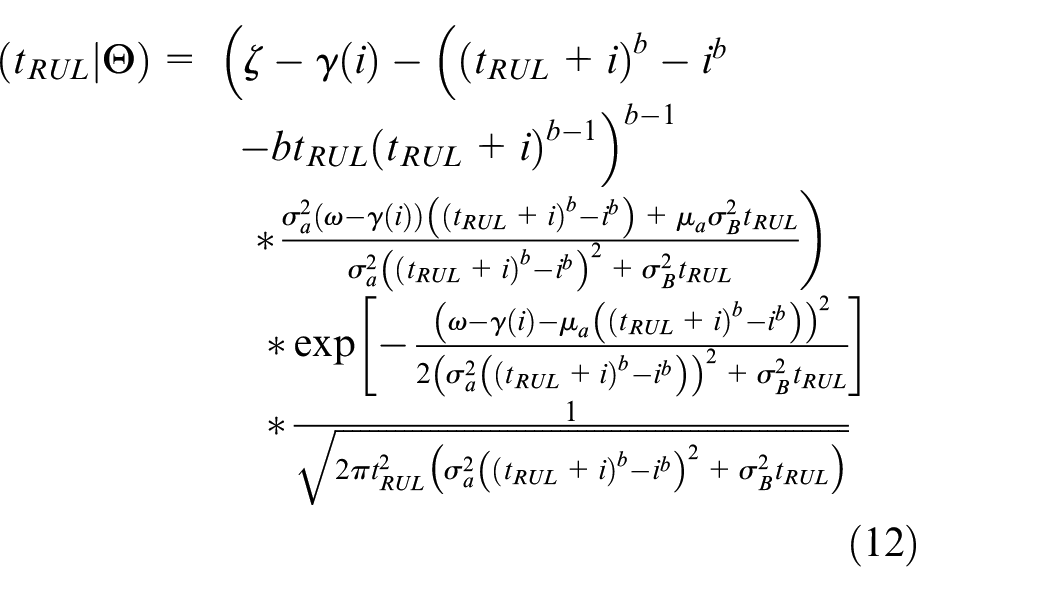
PDF of RUL based on a nonlinear Wiener process
The nonlinear Wiener degradation process for the performance index can be modeled as 19

where
We choose the power function
Iterative update of the nonlinear Wiener degradation model
It is necessary to iteratively update the degradation model in real-time due to the inability to obtain the full life cycle data. Meanwhile, parameter estimation methods based on traditional search algorithm will lead to low accuracy and time consumption in the nonlinear degradation model. In order to obtain parameters of degradation model
Iterative update of drift coefficient and diffusion coefficient
First, we rewrite equation (11) as

with

with

According to the property of the normal distribution, the PDF of

It is followed by the log likelihood function involving the parameter set
It is difficult to maximize the log likelihood function in equation (17) because the distribution of
In addition, combine the normal distribution characteristics of
In the following, the updated expectation and covariance of the hidden variable
The target of M-step is to find
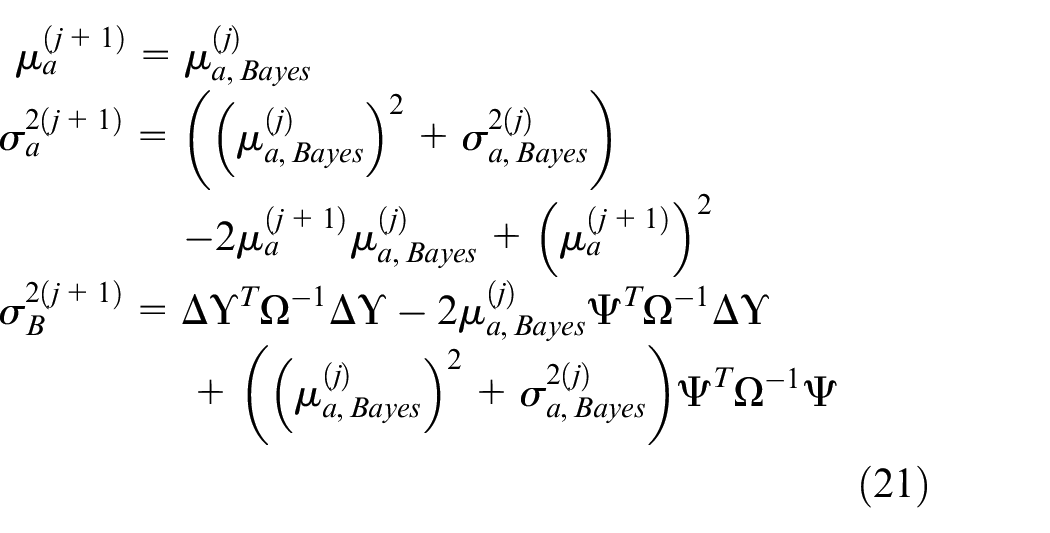
Iterative update of nonlinear characteristic parameter
Up to now,
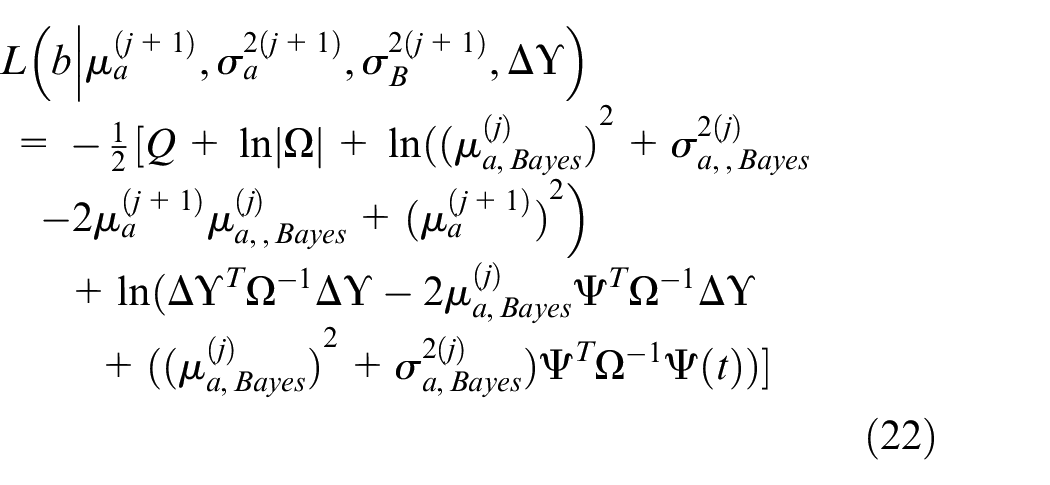
where
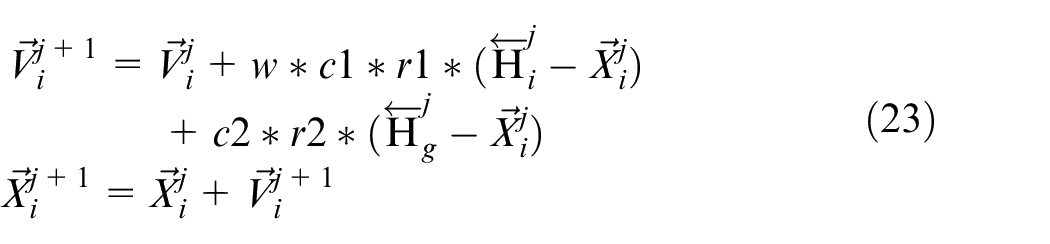
where
The optimal value of
Algorithm PBEA: update of
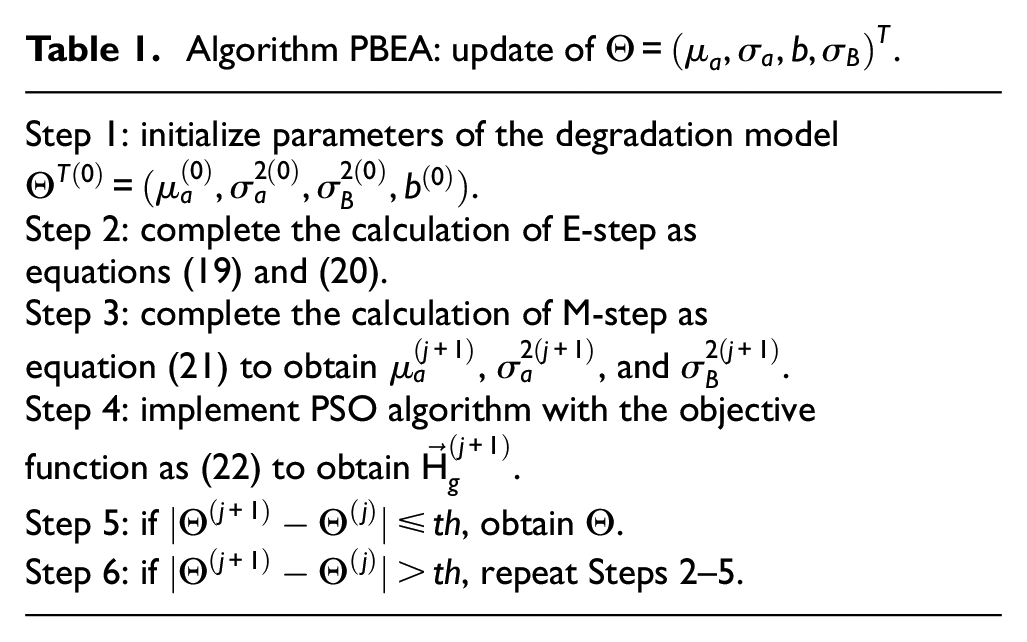
RUL prediction architecture for the closed-loop motor system
Figure 2 shows the closed-loop RUL prediction architecture based on the performance degradation index for the motor system.
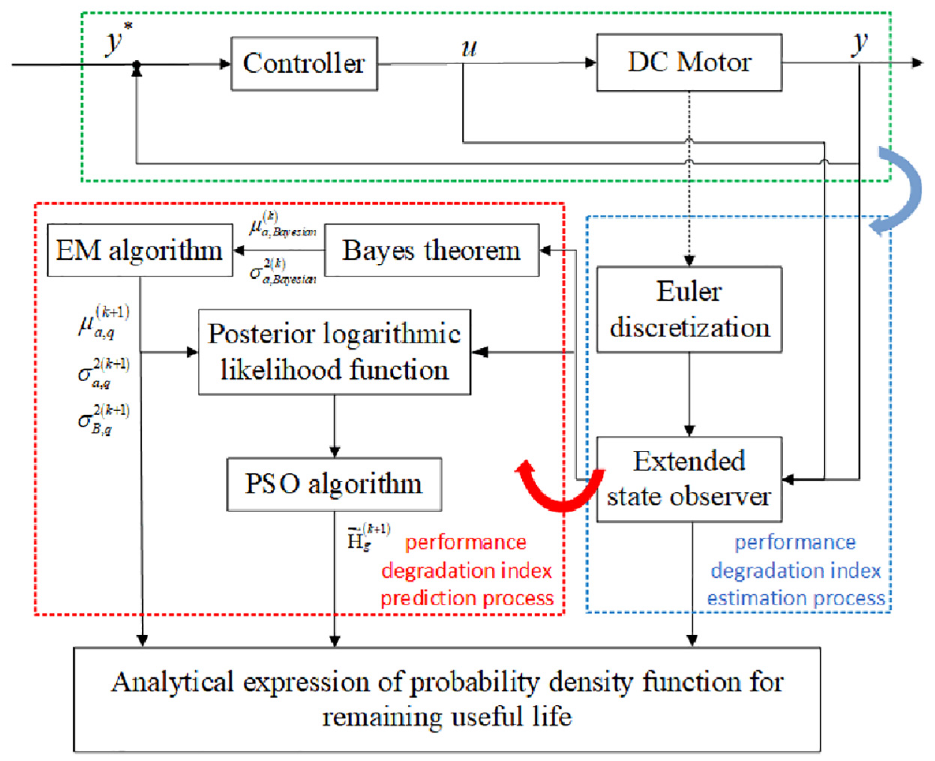
Closed-loop performance degradation prediction architecture of motor system.
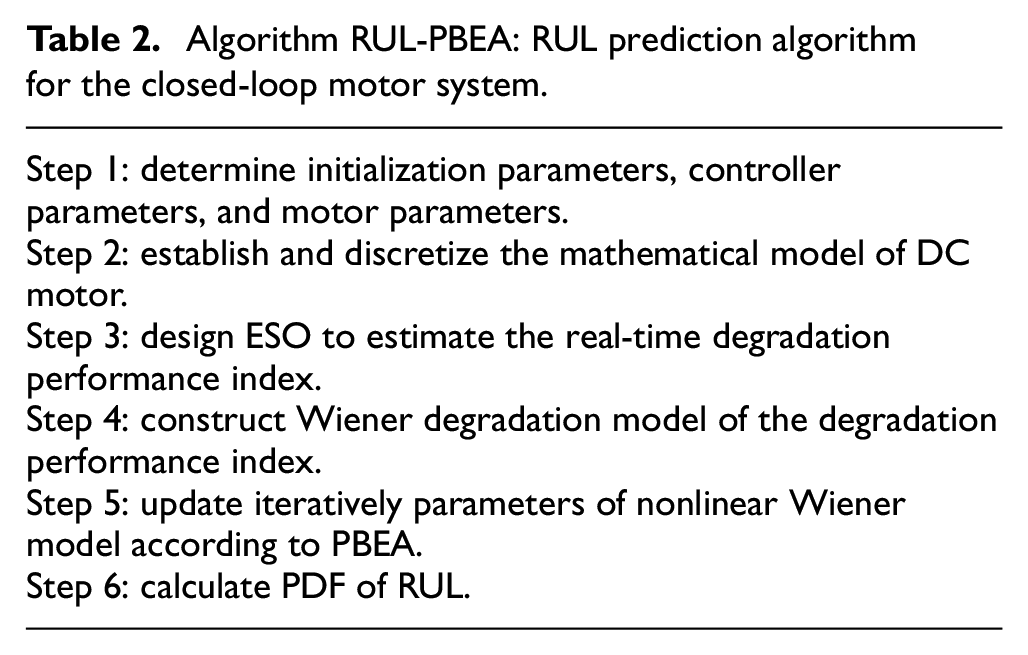
The aforementioned RUL calculation process of the closed-loop motor system is represented as Algorithm RUL-PBEA in Table 2.
Algorithm RUL-PBEA: RUL prediction algorithmfor the closed-loop motor system.
Case study on DC motor
In this section, the proposed closed-loop RUL prediction algorithm is verified by case studies on two kinds of motor systems with multiple slow time-varying parameters.
Verification of the accuracy of ESO
Case study on DC motor
The closed-loop control block diagram of DC motor can be exhibited in Figure 3. Motor parameters, controller parameters, and initial values are summarized as follows.
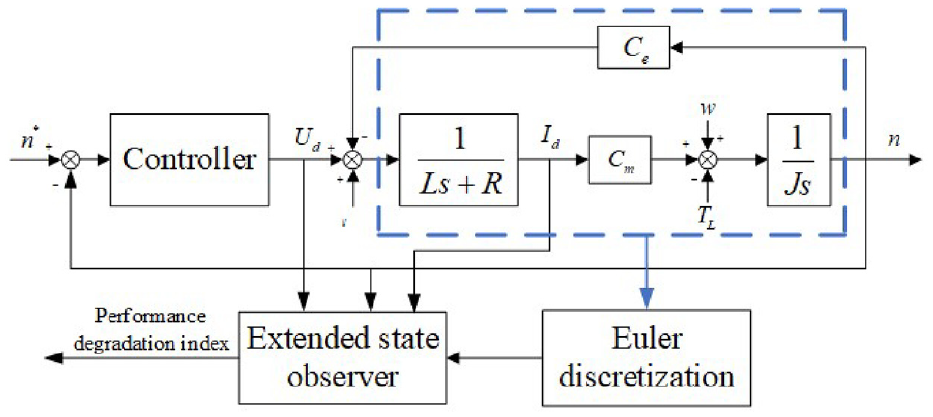
Control schematic diagram of DC motor.
To better demonstrate the effectiveness of the proposed RUL algorithm, it is assumed that the degradation rate of resistance and inductance increases at
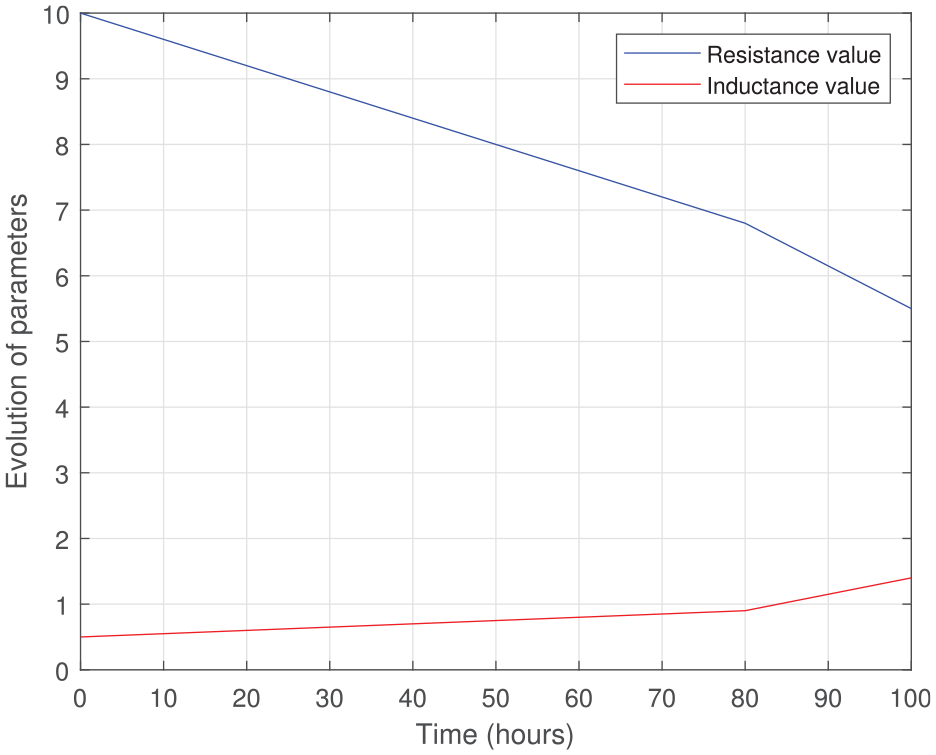
Evolution of motor resistance and motor inductance.
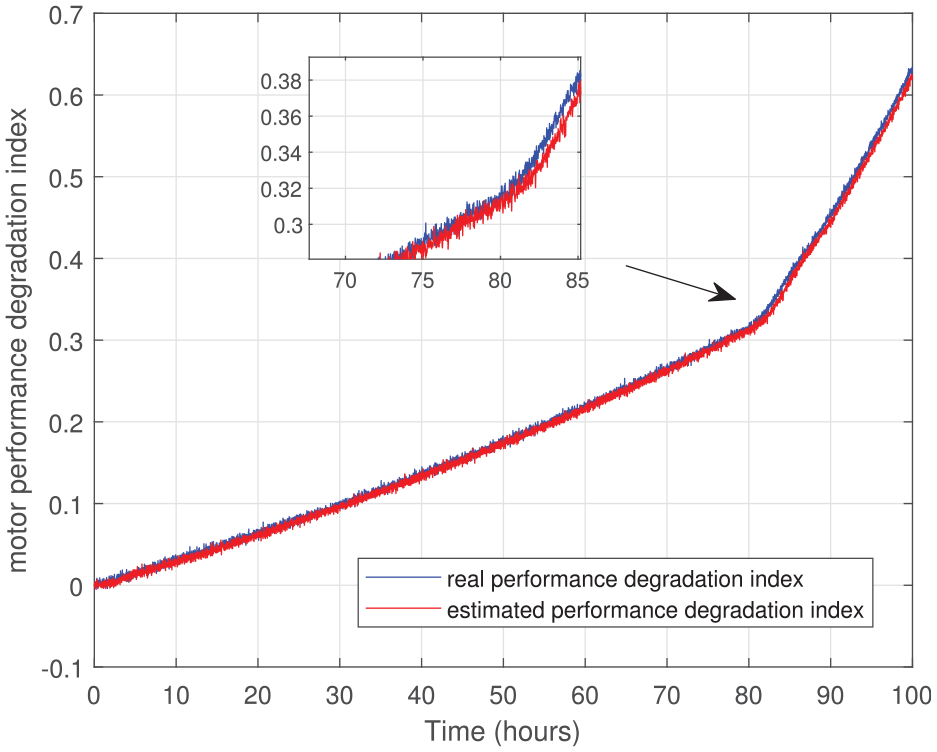
It is worth noting that
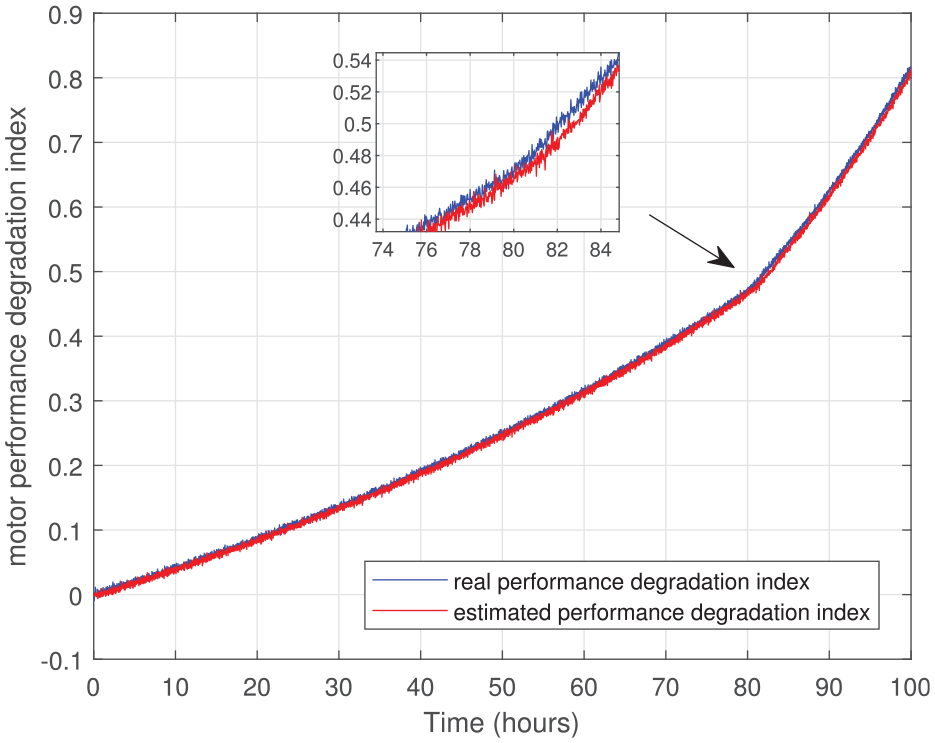
Real and estimated motor performance degradation index of DC motor.
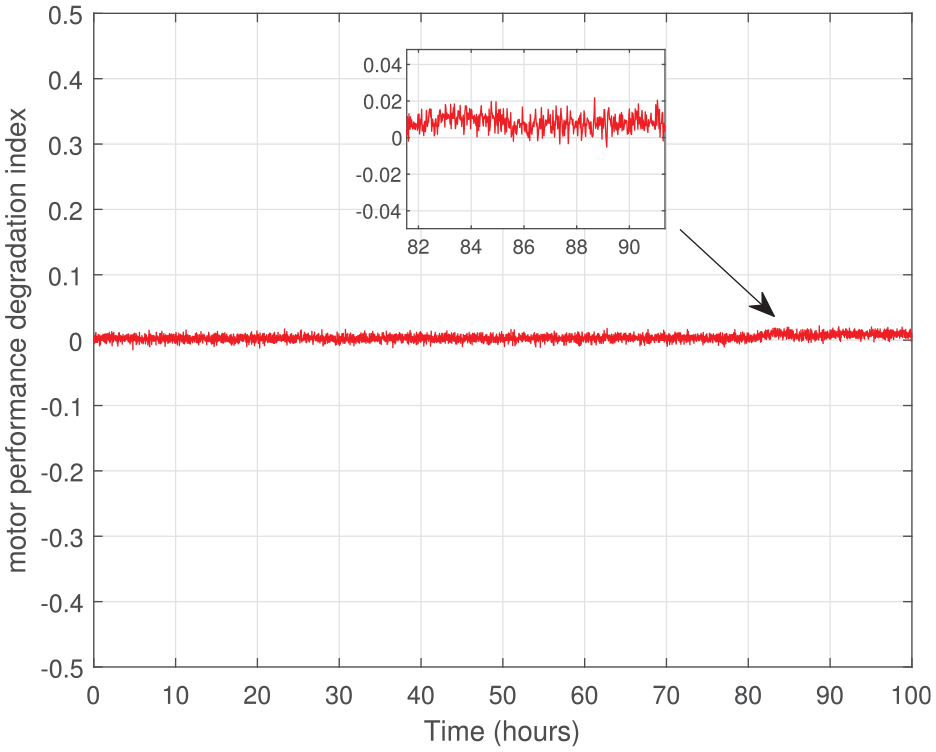
Error between real and estimated motor performance degradation index of DC motor.
Case study on permanent magnet synchronous motor
Permanent magnet synchronous motor (PMSM) is another kind of widely used motor as core power mechanism so that designed ESO should be validated on PMSM for stronger persuasiveness. The closed-loop control block diagram of PMSM can be exhibited in Figure 7. The dynamic mathematical model of PMSM under general assumptions can be arranged as 31
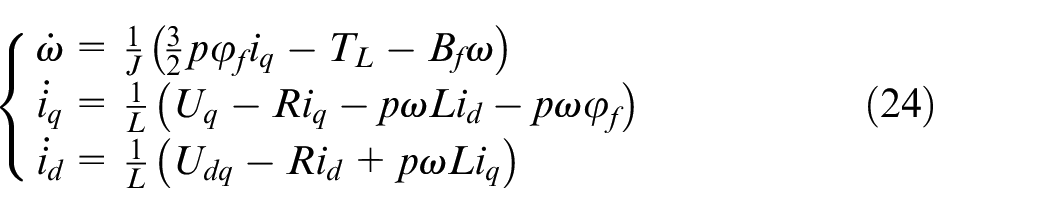
where
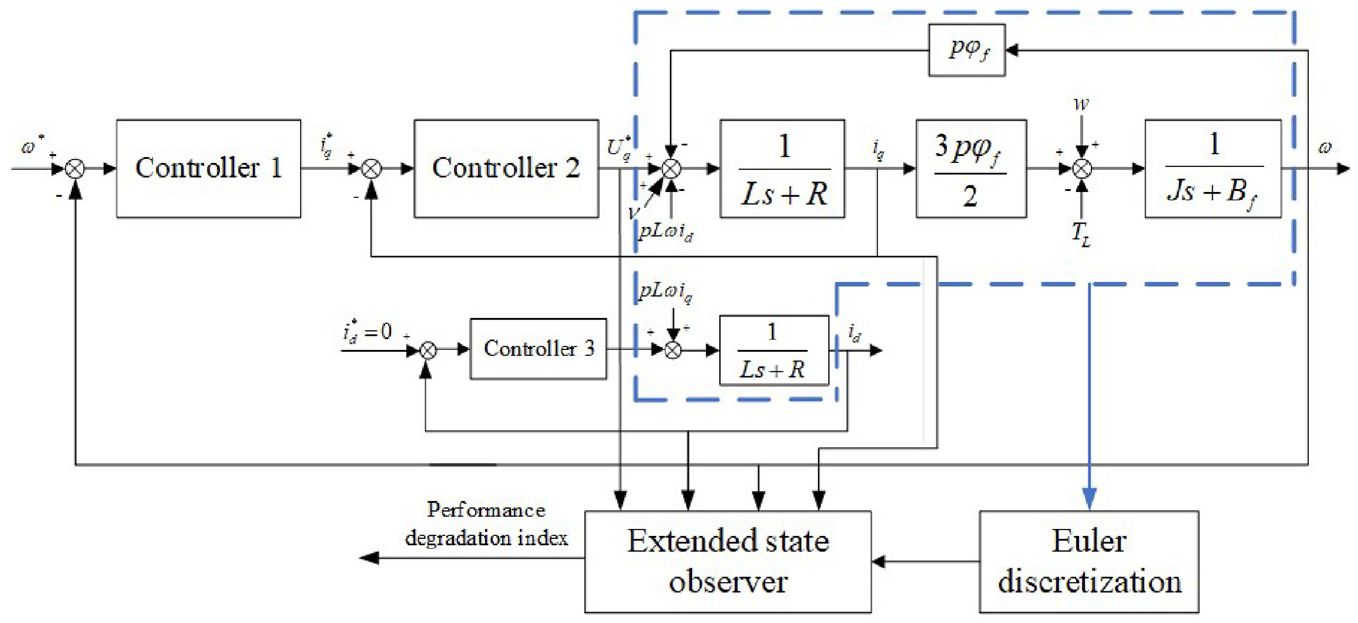
Control schematic diagram of PMSM.
Real and estimated motor performance degradation index of PMSM.
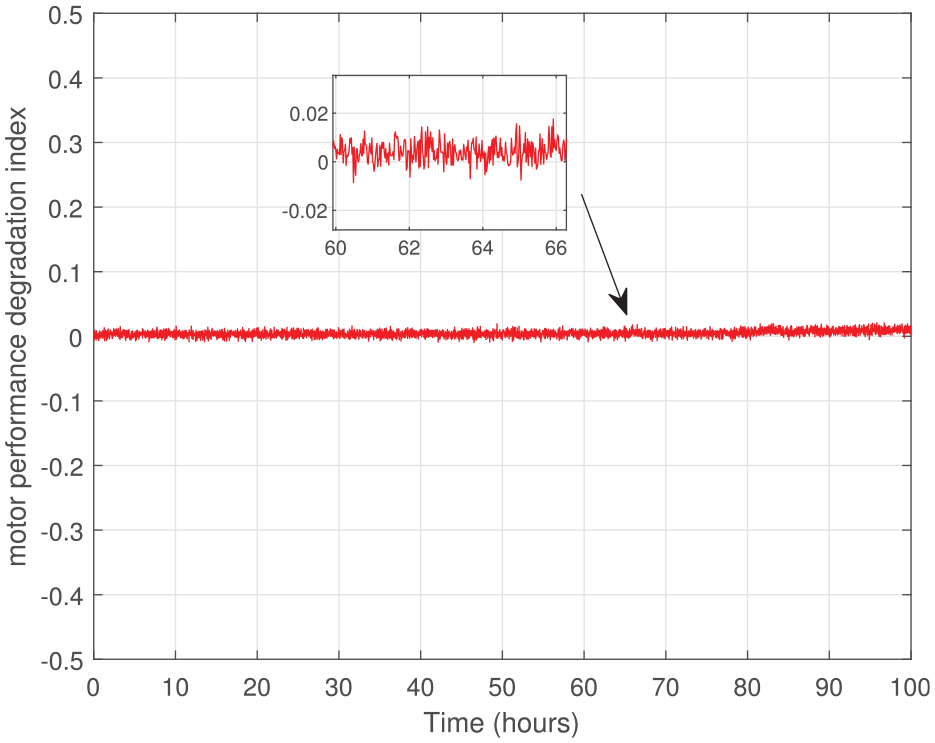
Error between real and estimated motor performance degradation index of PMSM.
It can be concluded that designed observer in this article aimed at whether degraded DC motor or degraded PMSM can estimate the performance degradation indexes correctly. The only difference is that the degradation process of PMSM is slower than of DC motor under the same degradation conditions. In order to keep consistent with previous derivation of RUL prediction algorithm, subsequent simulation will focus on the performance degradation index of DC motor. It should be noted that the degradation process of PMSM can also be predicted in the same way like DC motor.
Verification of proposed RUL prediction algorithm
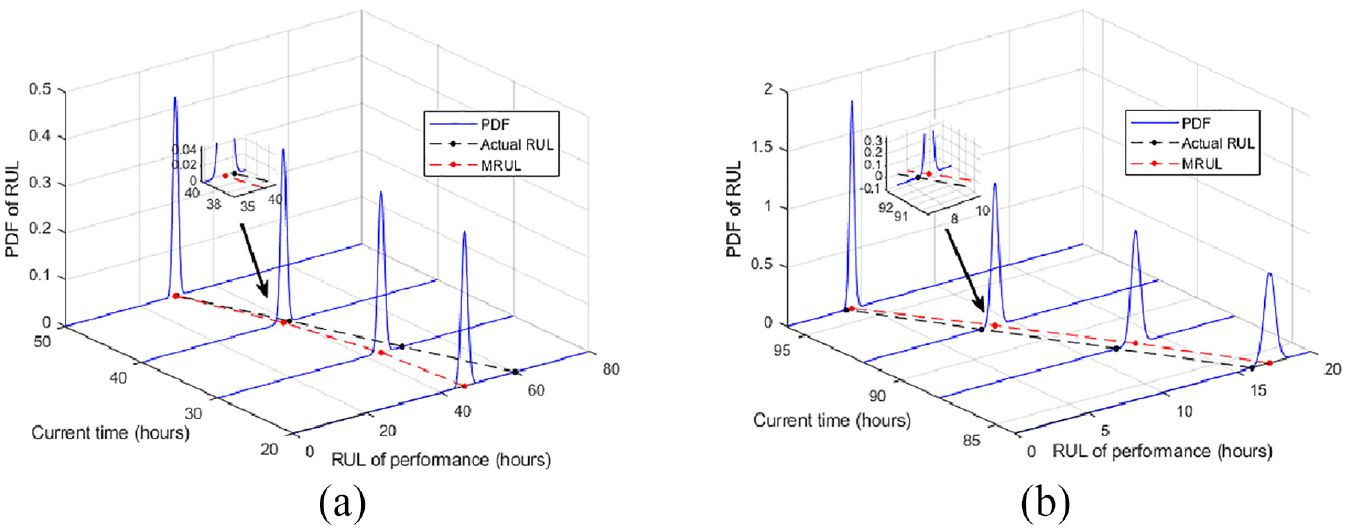
In order to reduce the load of calculation, it is not necessary to calculate the PDF at each time. Eight time points
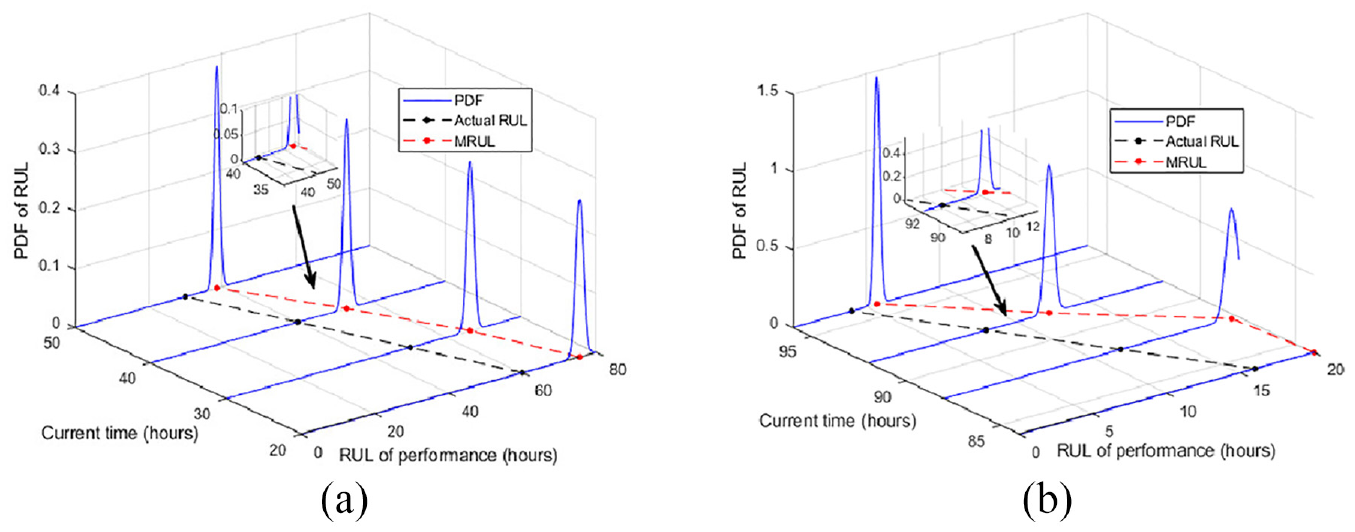
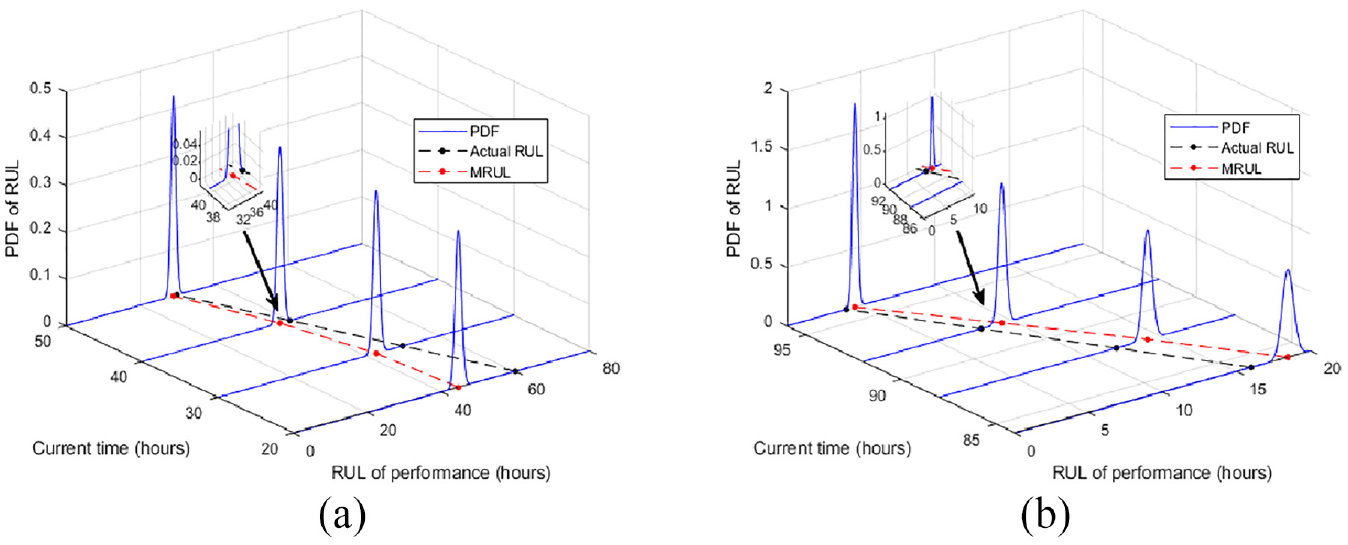
Figures 10(a), 11(a), and 12(a) show the RUL prediction of RUL-SA, RUL-TDSA, and RUL-BEA before the turning point. Figures 10(b), 11(b), and 12(b) show the RUL prediction of RUL-SA, RUL-TDSA, and RUL-BEA after the turning point. Figure 13(a) and (b) shows the accuracy of the RUL prediction by RUL-PBEA before and after the turning point, respectively. Particularly, MRUL denotes maximum probability RUL in PDF curve. 20 It can be seen intuitively that the result obtained by RUL-PBEA is more accurate than RUL-SA, RUL-TDSA, and RUL-BEA. Under the projection angle of view, the closer the red dotted line and the black dotted line are, the higher RUL prediction accuracy achieve. Consequently, whether before or after the turning point, the RUL prediction accuracy of RUL-PBEA proposed in this article is higher than that of algorithm RUL-SA, RUL-TDSA, and RUL-BEA.
RUL prediction by RUL-SA: (a) PDF after the turning point and (b) PDF after the turning point.
RUL prediction by RUL-TDSA: (a) PDF after the turning point and (b) PDF after the turning point.
RUL prediction by RUL-BEA: (a) PDF after the turning point and (b) PDF after the turning point.
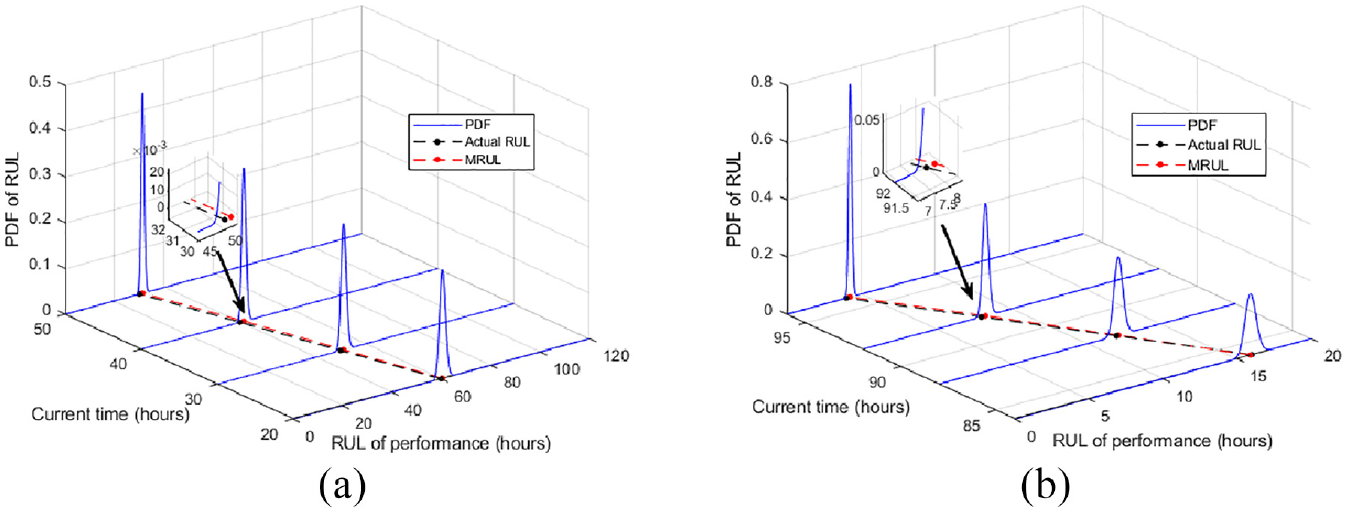
RUL prediction by RUL-PBEA: (a) PDF after the turning point and (b) PDF after the turning point.
To quantitatively obtain the error between the real degradation trajectory and the established degradation model, Akaike information criterion (AIC) and mean-squared error (MSE) were both useful measure. 17 AIC can be expressed as

where

where
Table 3 indicates that the suitability of degradation models updated by PBEA is more accurate than those by SA, BEA, and TDSA. The marked values emphasize that MSE and AIC of PBEA is the smallest at each sampling time, which indicate that the degradation model updated by PBEA is more consistent with the actual model. Significantly, iterative processes of parameter
Comparison of updated degradation models by three algorithms at different times.
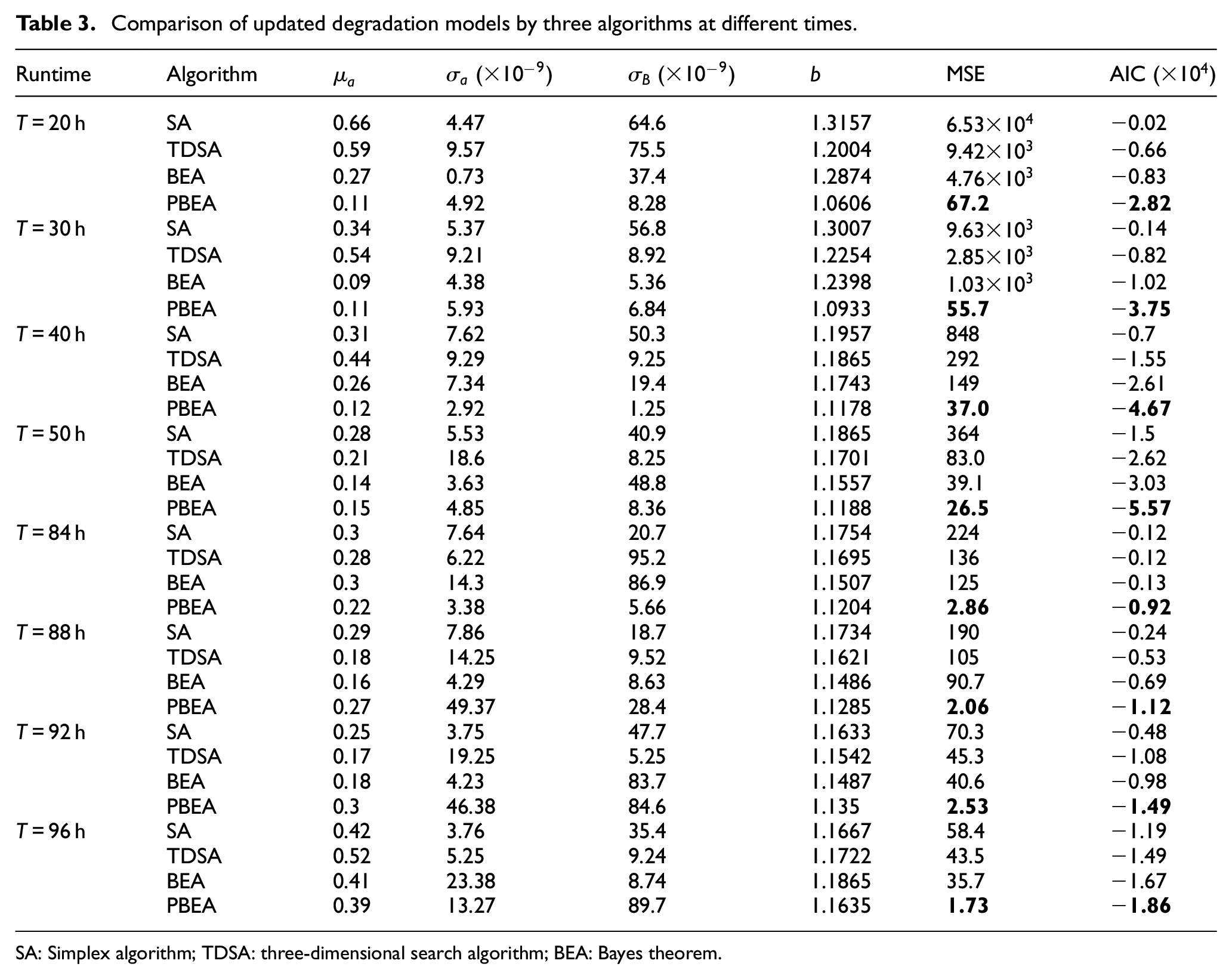
SA: Simplex algorithm; TDSA: three-dimensional search algorithm; BEA: Bayes theorem.
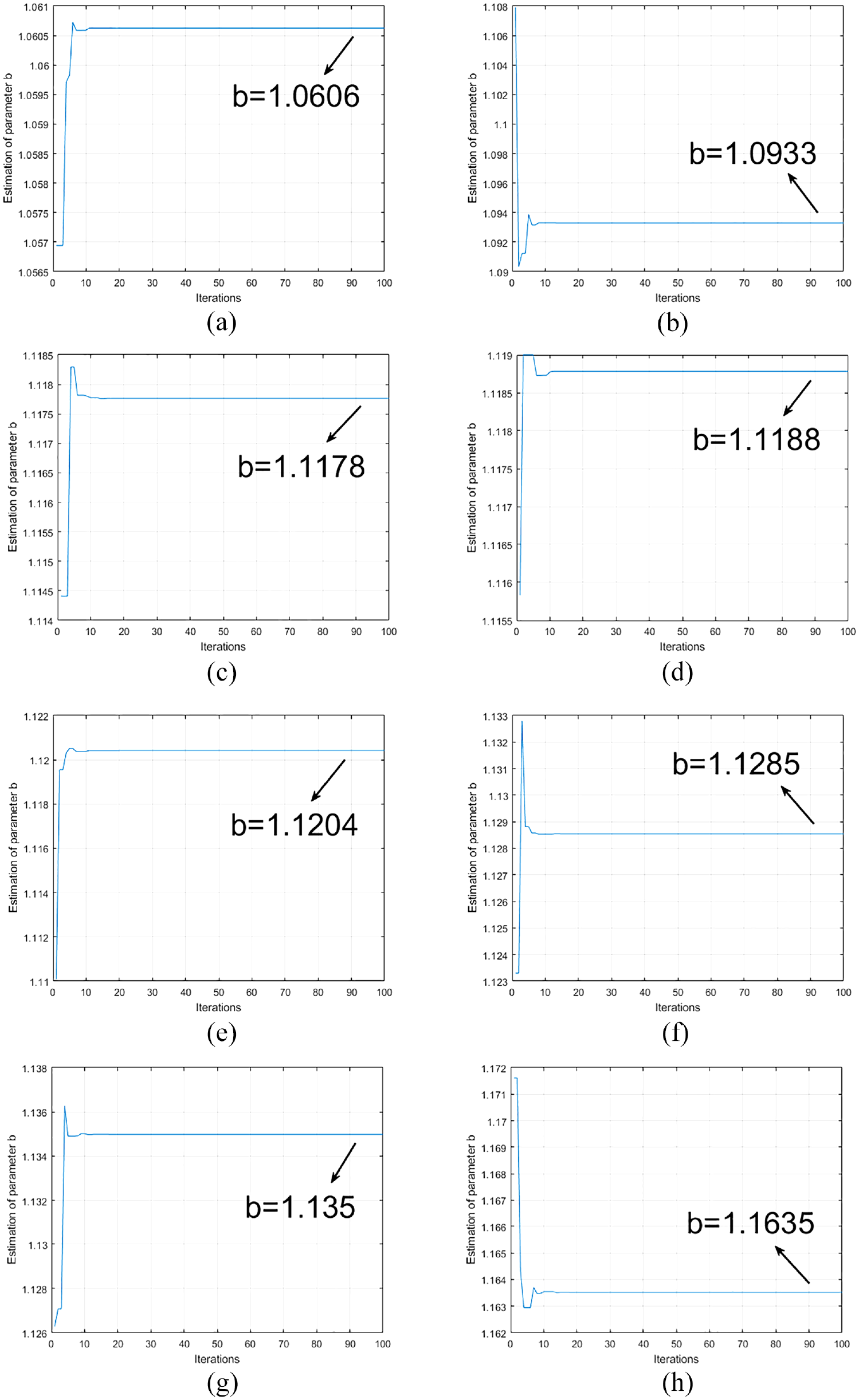
Estimation results of parameter
Conclusion
This article is devoted to the closed-loop performance degradation–based RUL prediction architecture of motor systems. To be specific, a closed-loop performance index of the motor system with multiple slow-varying parameters is first designed by ESO. Furthermore, it is important to update iteratively Wiener degeneration model by PSO and EM algorithm based on MLE algorithm for the purpose of obtaining the PDF of RUL. Finally, the effectiveness has been illustrated on the DC motor and PMSM. In order to improve the rationality of performance index and the accuracy of RUL prediction, our future work will dedicate to the integrated framework with performance estimation and prediction for the closed-loop control system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China (61673053, 61903026), the Natural Science Foundation of Beijing Municipality (4212040), and the JianLong Young Scholars Innovation Foundation (2022-0651).