
Abstract
This article addresses the global adaptive output-feedback state regulation problem for a class of uncertain nonlinear systems with generalized control coefficients. Remarkably, the system under investigation simultaneously possesses function control coefficients, input matching uncertainty, and unknown growth rate, which is essentially different from the closely related existing literature. Such nonlinearities from function control coefficients and uncertainties from unknown growth rate bring great technical difficulties to controller design. A novel dynamic gain is introduced to deal with the extra system nonlinearities from function control coefficients and unknowns from the growth rate. In addition, the extended state observer is developed to reconstruct the unmeasured states of the system. By integrating the dynamic gain and extended state observer, an adaptive output-feedback controller is designed, which ensures that the states of the system globally converge to zero, and the estimation of the input matching uncertainty converges to its actual value. Two simulation examples are given to demonstrate the effectiveness of the proposed method.
Keywords
Introduction
As is well known, many scholars have been attaching great importance to the analysis and control design of different systems, and have achieved a series of research results.1–21 A feedback domination design method that is not based on the separation principle was proposed when the growth rate of the system is a known constant.
1
Using this design method, a universal adaptive output-feedback controller was constructed, and the control coefficients of the system are only known constants (equal to 1).2,3 A new robust static output-feedback
It is well known that practical physical systems are inevitably affected by various uncertainties/noises. Therefore, in the past few decades, a large number of scholars have devoted effort to the state regulation problem for a class of nonlinear systems that can be used to describe more physical objects, and have more nonlinearities.22–30 In practical industrial applications, input interference can sometimes be regarded as a constant input matching uncertainty. Furthermore, in some special cases, the control of systems with input matching uncertainty is the basis for other control problems.22,26 The output-feedback control problem of the system was investigated, where the nonlinearities of the system are only related to the output of the system. 27 For systems with weaker conditions for growth rate, a compact design scheme was proposed, and the control coefficients of the system are constants. 28 Guo and Xie29,30 considered the control problem of time-delay and feed-forward systems with input matching uncertainty, but the control coefficients of the systems mentioned above are constants.
As far as we know, when the control coefficients of the system are the functions of the output or when the system has input matching uncertainty, the output-feedback control problem of the system has been studied, respectively. However, when the system has both the function control coefficients and the input matching uncertainty, the adaptive output-feedback state regulation problem of the system has not been studied so far.
This article is devoted to proposing an adaptive output-feedback scheme to achieve the state regulation for the system with function control coefficients, input matching uncertainty, and unknown growth rate. We introduce a novel dynamic gain to counteract the negative effects of extra nonlinearities and unknowns in the system. By combining the dynamic gain, an extended state observer is built to estimate the input matching uncertainty and reconstruct the unmeasured states of the system. Based on this, an adaptive output-feedback controller is designed to ensure that all states of the system globally converge to zero, and the estimation of the input matching uncertainty ultimately converges to its actual value.
The highlights of the article can be summarized as follows:
The system allows more nonlinearities and unknowns than those in the related literature. Specifically, the control coefficients of the system are the functions of output, rather than known constants as in the previous literature.6,7,26,28,29 The growth rate of the system nonlinearities is an unknown constant, unlike the case of known constant growth rate. 1 In addition, the system also has input matching uncertainty, which makes the system different from those in the relevant literature.9,10 The existence of multiple uncertainties and nonlinearities in the system will inevitably bring some substantial obstacles to control design and analysis.
A novel dynamic gain is introduced to deal with the additional nonlinearities from the function control coefficients and the serious unknowns from the growth rate. This is essentially different from the related works.9,28 Particularly, compared with constant control coefficients of Huang and Liu, 28 the gain in this article can be used to compensate the function control coefficients well.
The remainder of the article is organized as follows. The “Problem formulation and preliminaries” section formulates the system model. The “Output-feedback controller design” section designs an output-feedback controller to solve the global state regulation problem. The “Main results” section summarizes the main research results of this article. The “Proofs of Proposition 1 and Lemma 1” section gives detailed proofs of a proposition and a lemma. The “Simulation examples” section shows two simulation examples, and the “Conclusion” section addresses some concluding remarks.
Problem formulation and preliminaries
In this article, we consider the following global adaptive output-feedback state regulation problem for uncertain nonlinear systems
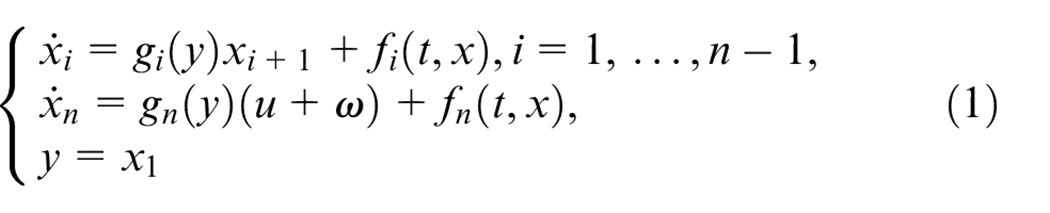
where
In what follows, we suppose that only the system output
Assumption 1
There exist known positive constants

Assumption 2
For system equation (1), there exists a positive unknown constant

holds for all
We would like to illustrate the difference between the state regulation problem in this article and those in the existing related works.1,6,7,26–29 Assumption 1 indicates that the control coefficients of system equation (1) are nonlinear functions of output, which is essentially different from the previous work, where the control coefficients of the system are known constants.6,7,26–29 Assumption 2 shows that the growth of system equation (1) depends on the unmeasured states and the growth rate is an unknown constant, which is different from the related literature where the growth rate is only a known constant.
1
Hence, it is worth noting that in addition to the input matching uncertainty, namely the existence of unknown
Output-feedback controller design
Denote
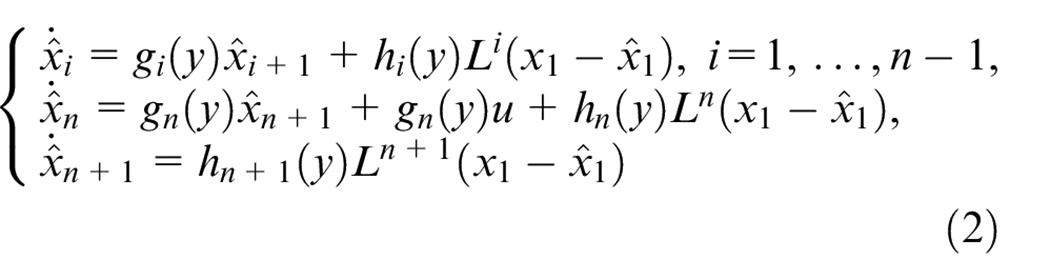
with

where
Based on the above observer, we design the following output-feedback controller

where
Remark 1
It is worth mentioning that system equation (1) has input matching uncertainty, which is different from Jin and Liu, 9 and thus, the control design methods by Jin and Liu 9 cannot be used to deal with the problems in this article. Moreover, the control coefficients of system equation (1) are functions of output, rather than constants as by Huang and Liu, 28 and this also makes the existing design methods inapplicable.
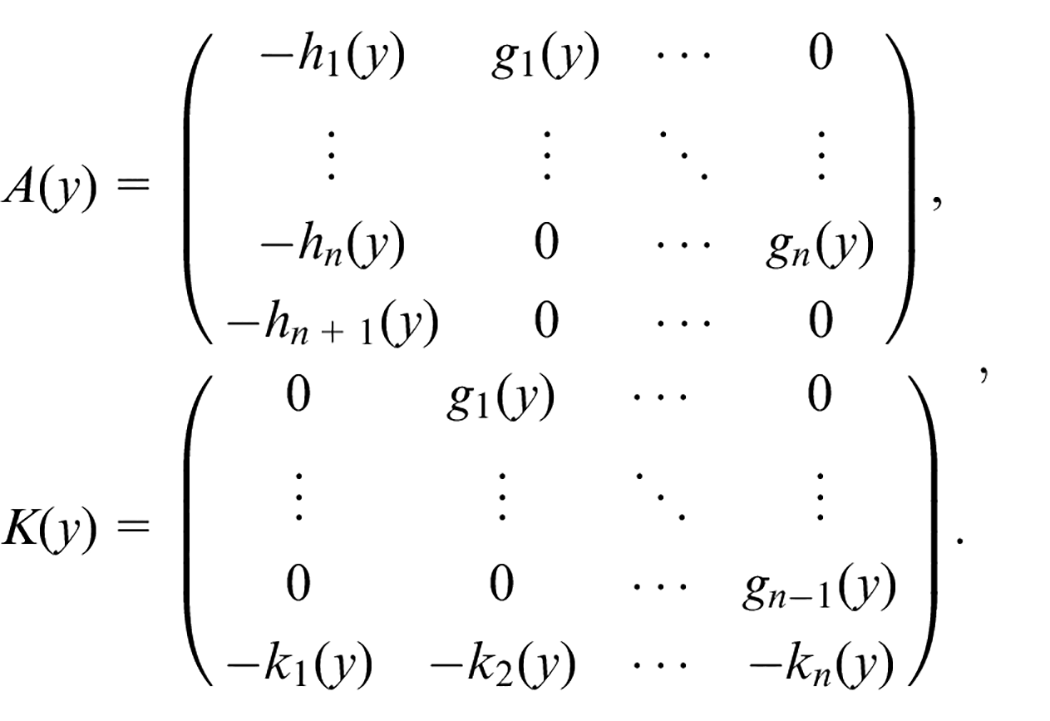
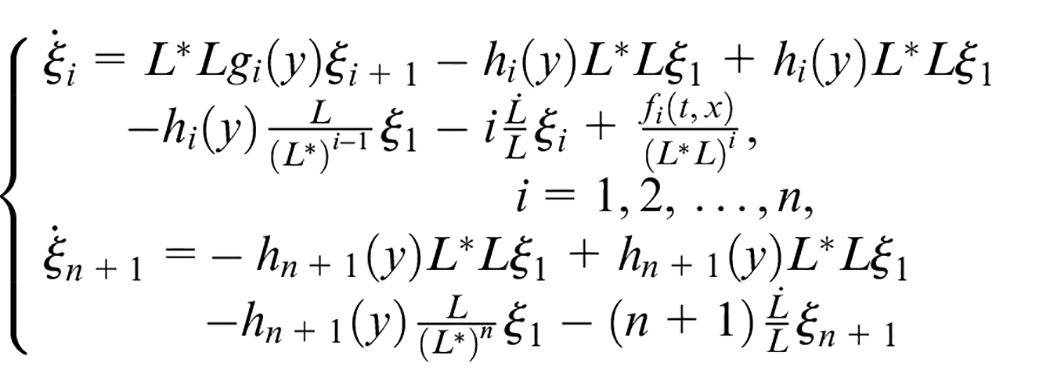
Let

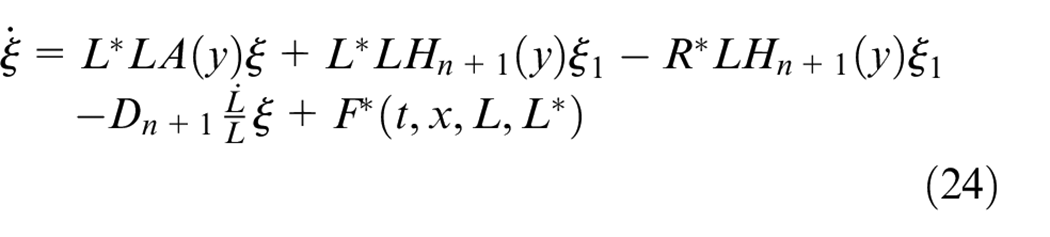
Using equations (1), (2), and (4), we have

where
Choose
where
By Assumption 1, there exists a known positive constant
Before showing the main results of this article, we give the following proposition, which will play an important role in the subsequent proof.

where
Proof
See the “Proof of Proposition 1” subsection later.
Main results
By the definition of
Theorem 1
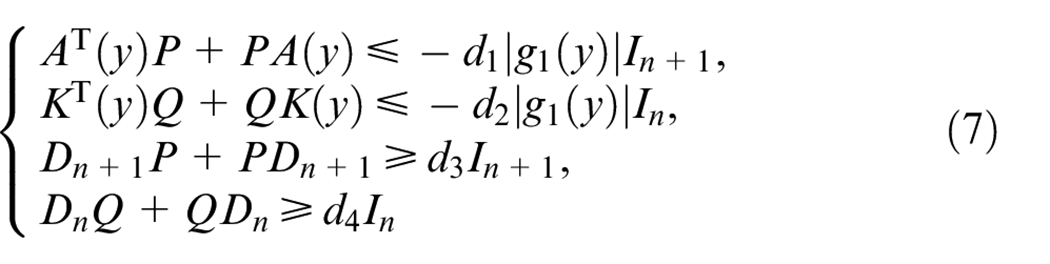
Consider system equation (1) satisfying Assumptions 1 and 2 if the designed functions
Before proving this theorem, we first propose the following lemma, whose proof is given in the “Proof of Lemma 1” subsection for compactness.
Lemma 1
For any initial condition of system equation (1), the controller equation (4) guarantees that the gain
We can deduce that
Proofs of Proposition 1 and Lemma 1
In this section, we will give the detailed proofs of Proposition 1 and Lemma 1.
Proof of Proposition 1
Keeping in mind that
By equation (8), the last term on the right-hand side of the above inequality satisfies
From Assumption 2, we obtain
Thus,

Substituting equations (13) and (14) into equation (12), noting
where
Proof of Lemma 1
Boundedness of the gain

From equation (9), we get
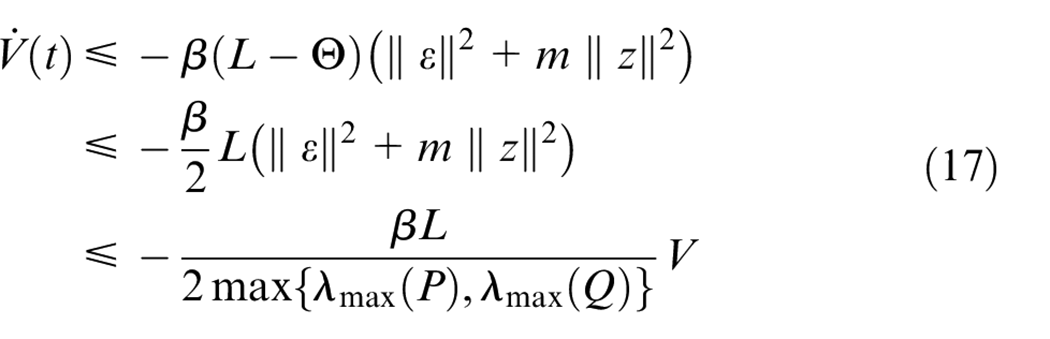
which follows that
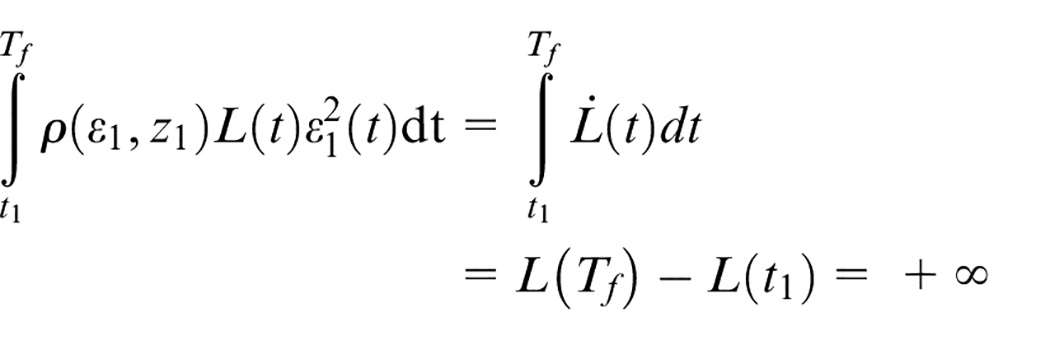
By equation (17), we arrive that
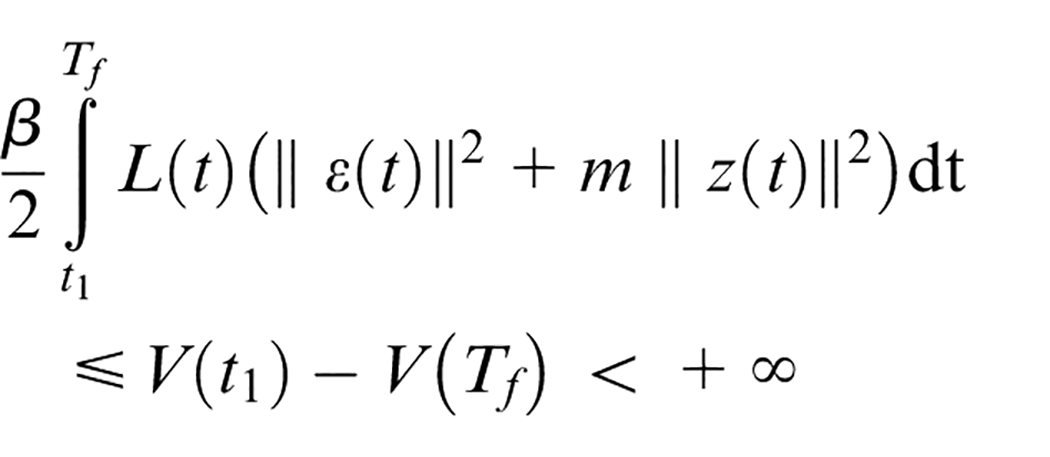
which is a contradiction.
Furthermore,
Boundedness of the states
We define

Moreover, noting that
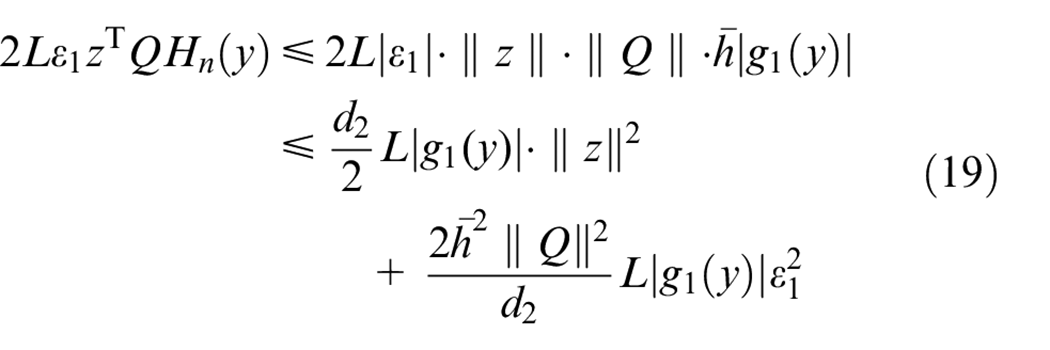
From Assumption 1 and
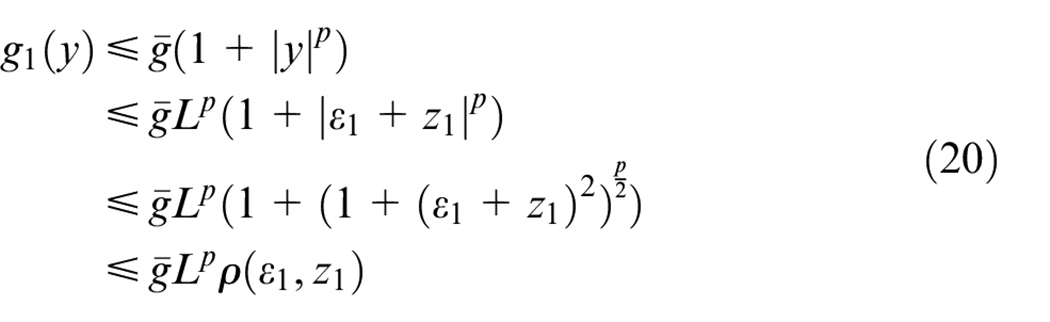
Substituting equations (19) and (20) into equation (18), we obtain
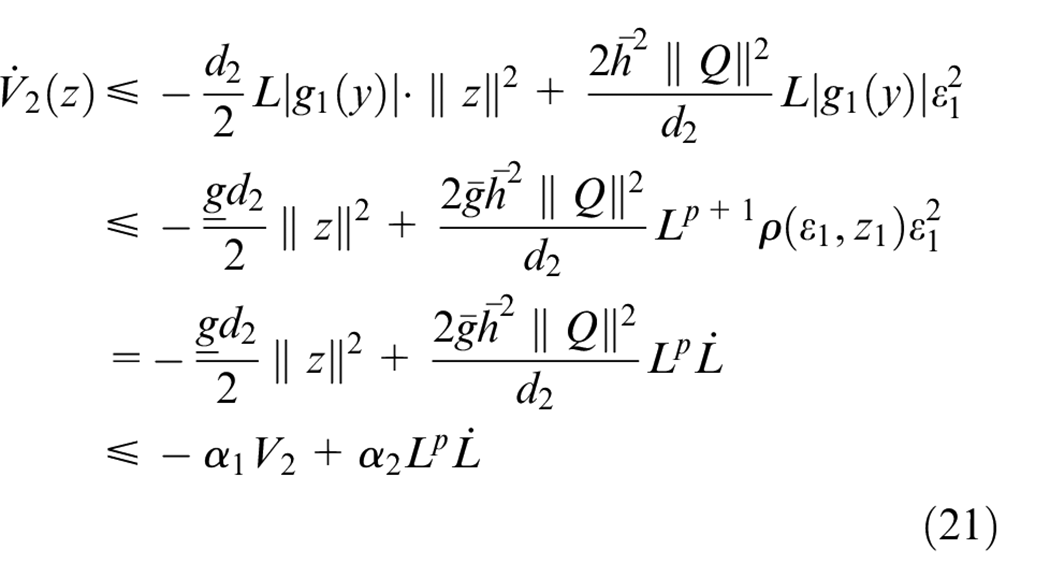
with

Integrating both sides of the above inequality, we have
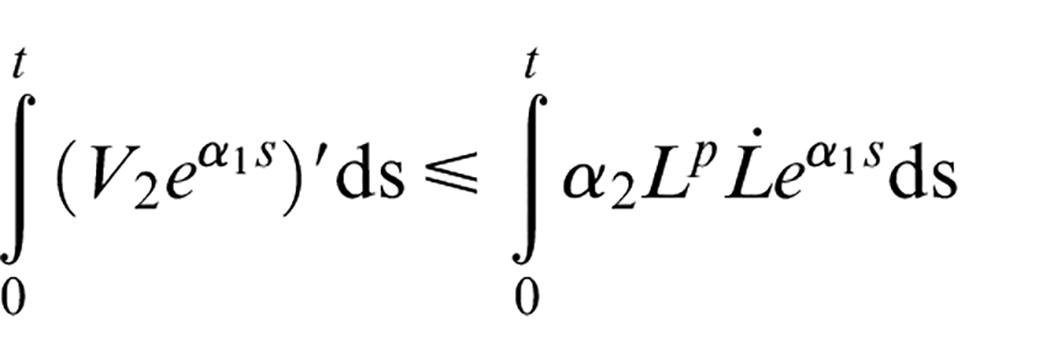
that is, for all
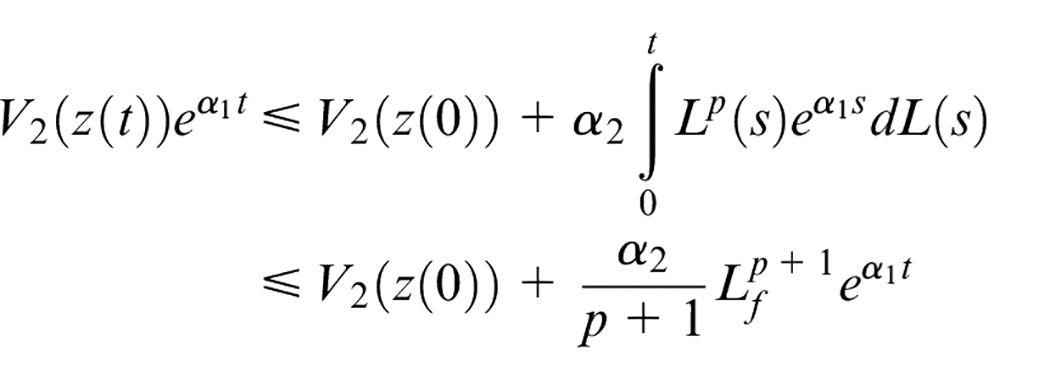
Furthermore, we get

Therefore,
Next, we will prove the boundedness of

where
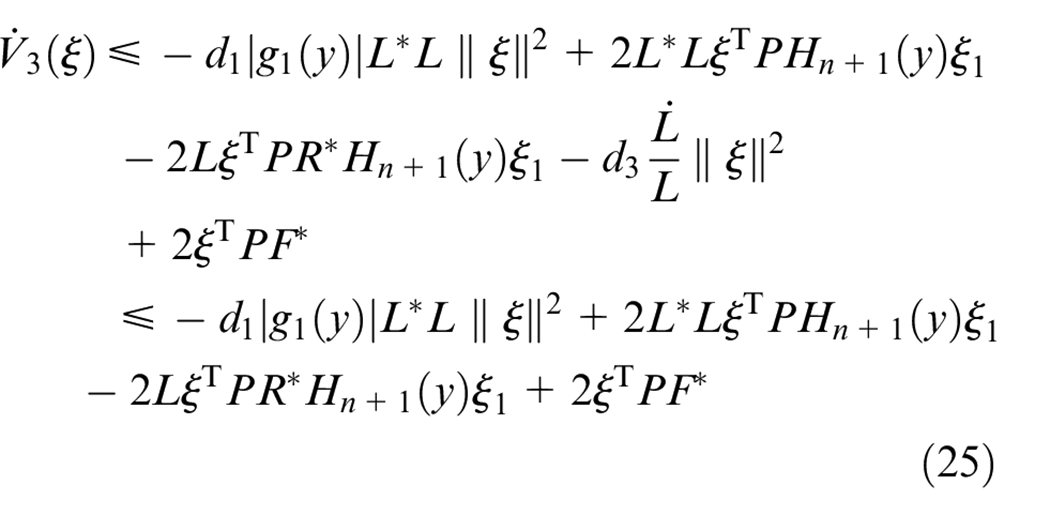
By equation (6), we have
which can be written as
where

and

Let
Noting that
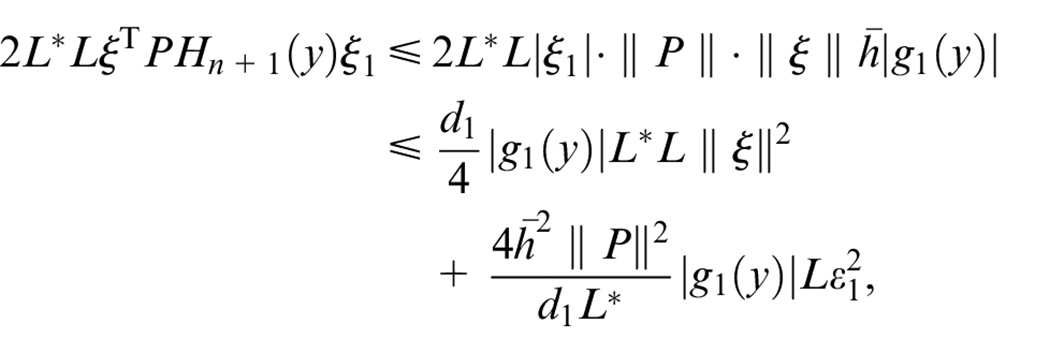
and

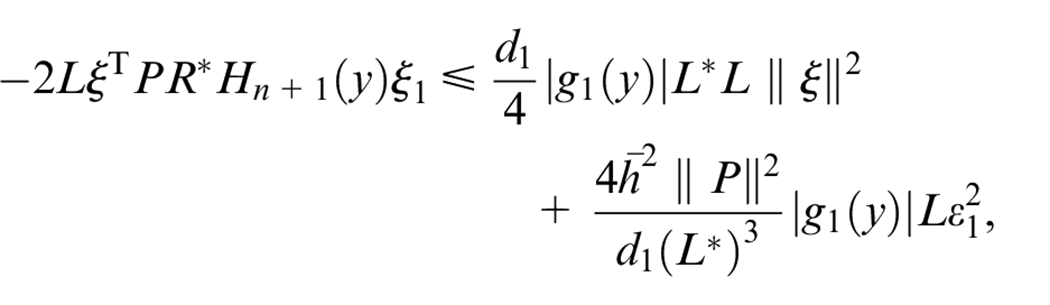
Substituting the above inequalities into equation (25), and noting
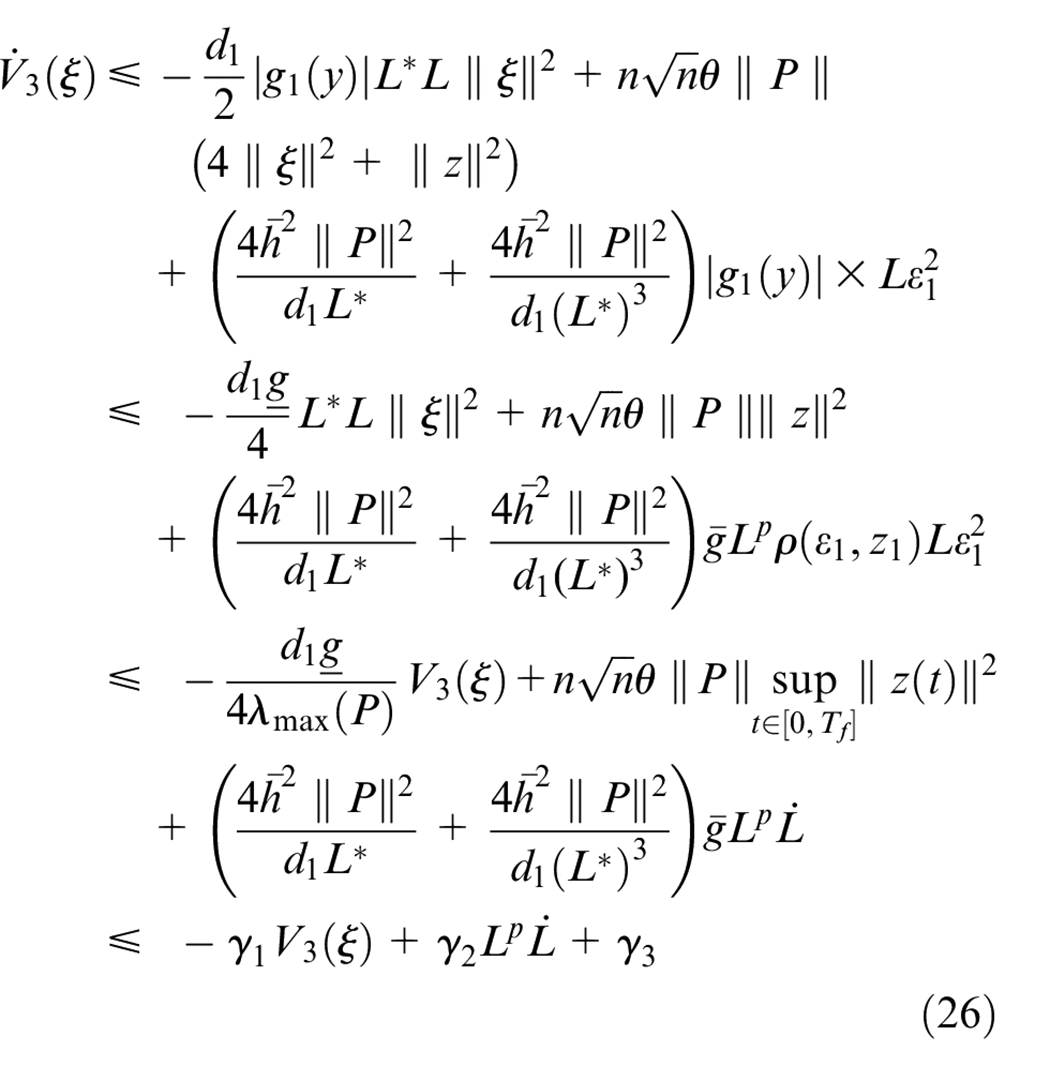
where
Simulation examples
In this section, we give two examples to illustrate the validity of the theoretical results.
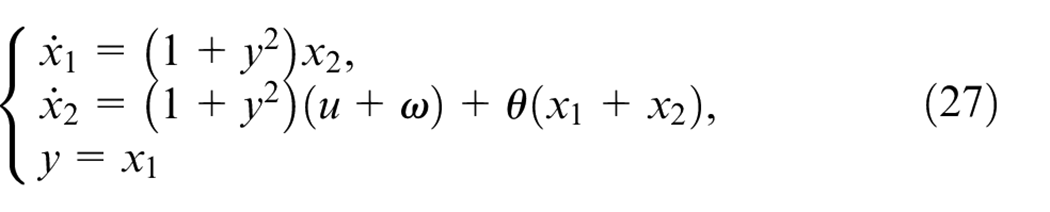
It can be verified that system equation (27) satisfies Assumption 1 with
We choose
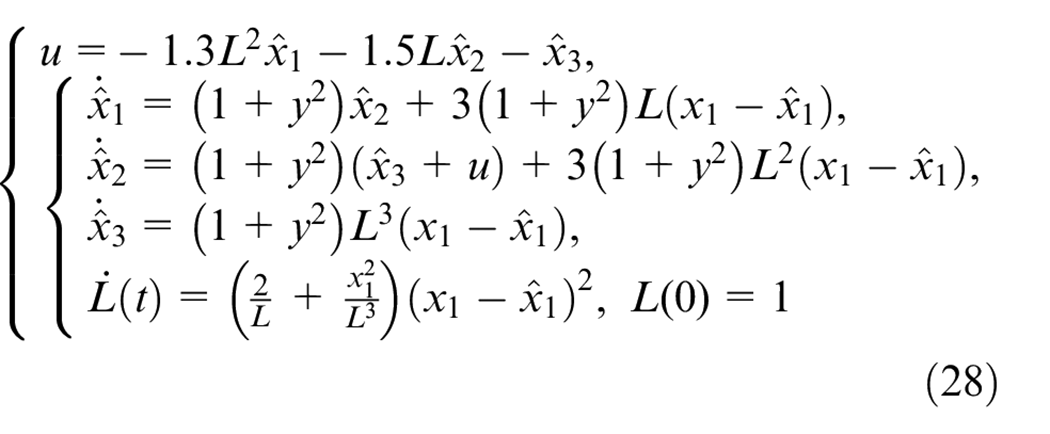
For simulation, we set the initial conditions of the closed-loop system by
The trajectories of states
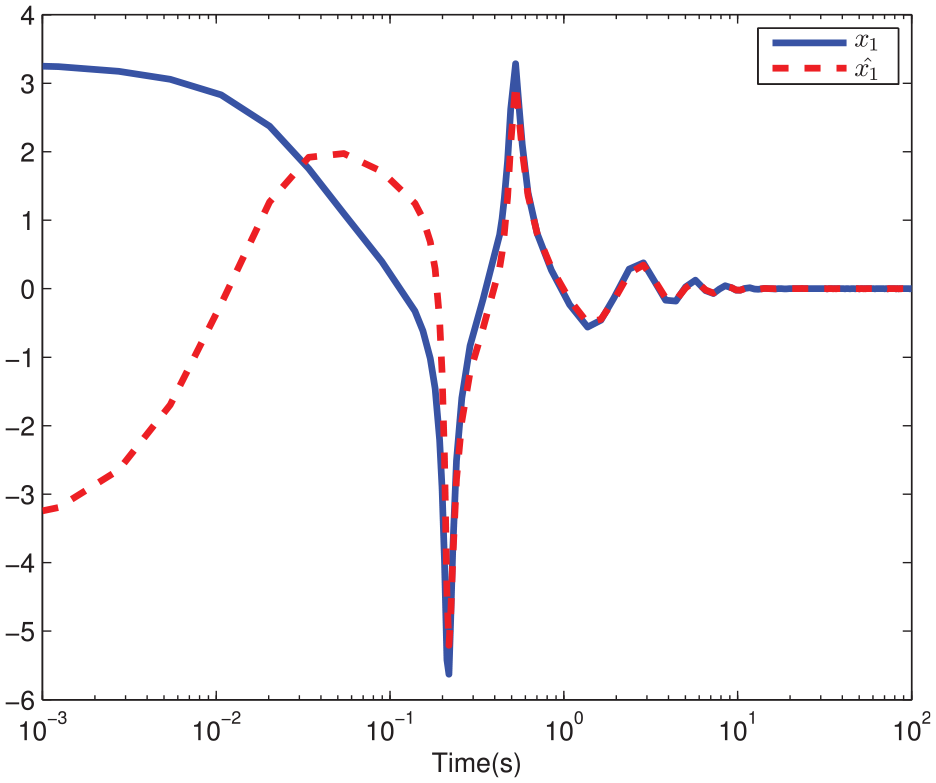
The trajectories of states
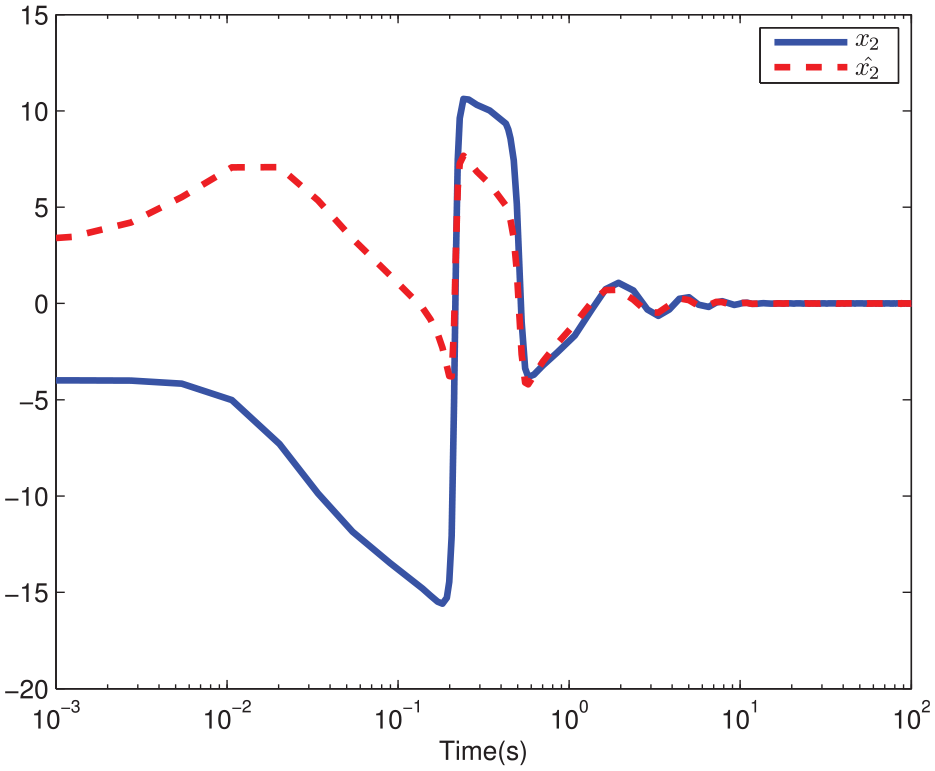
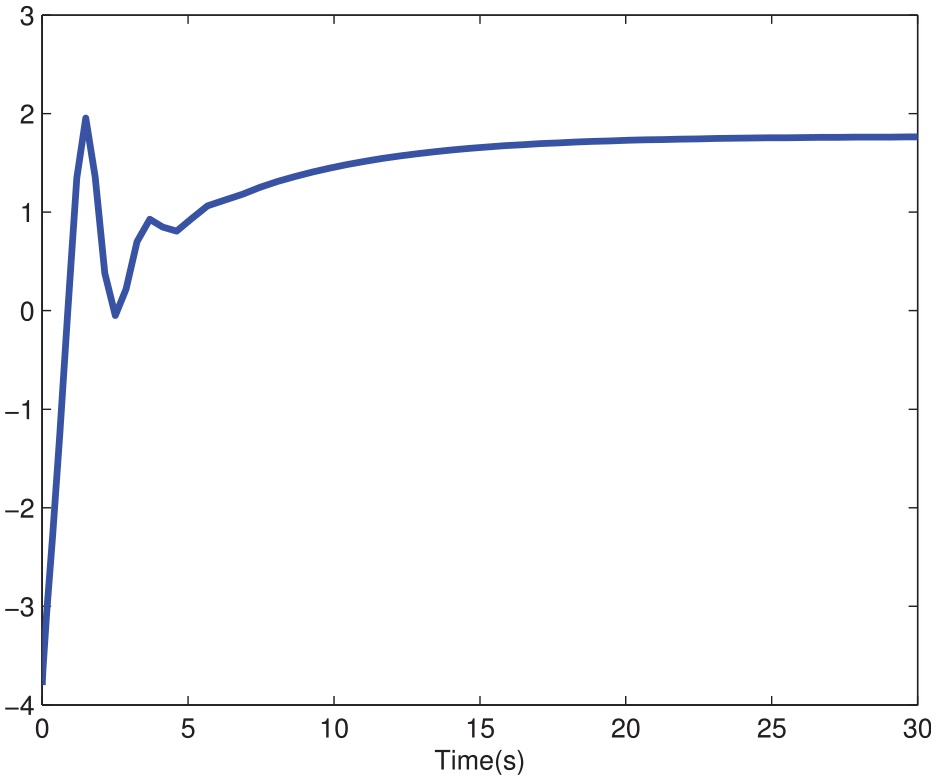
The trajectory of state
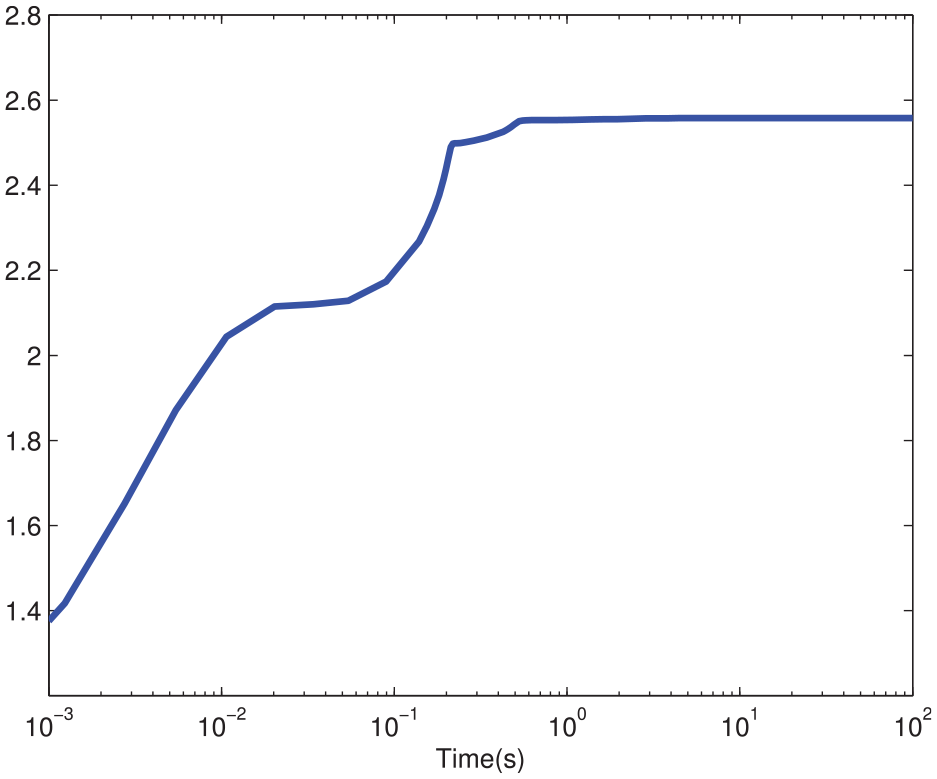
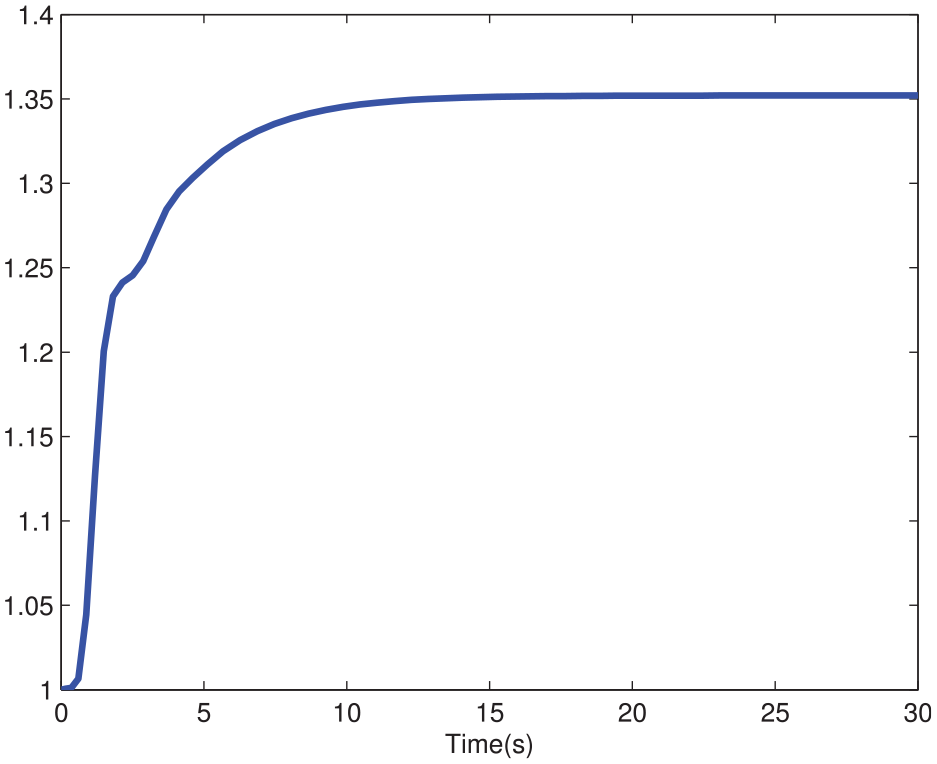
The trajectory of gain
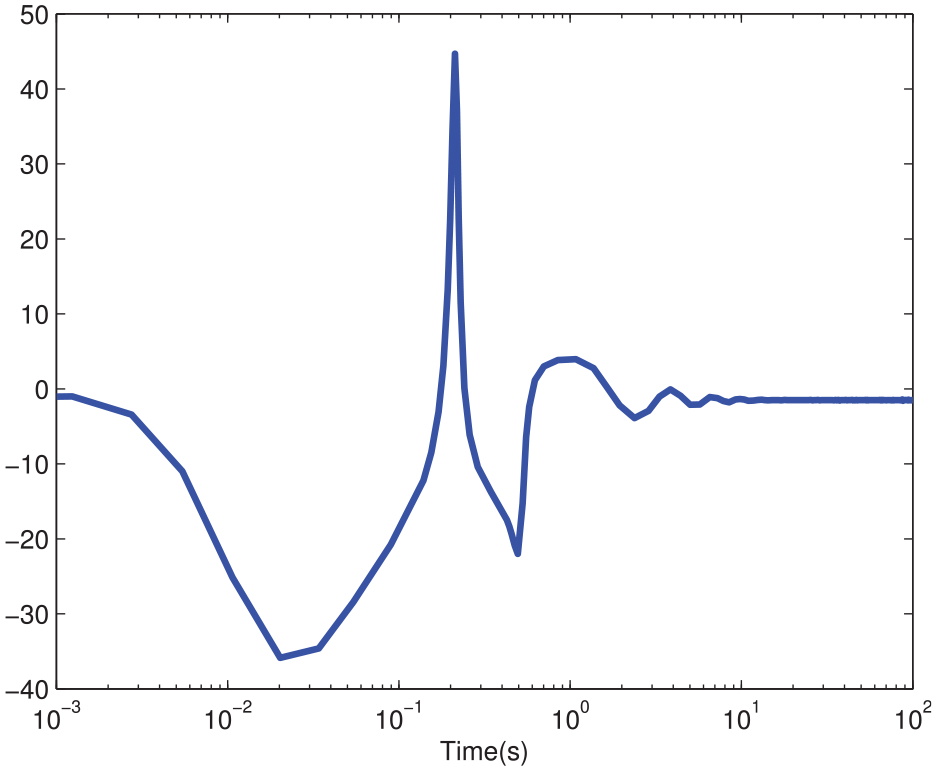
The trajectory of

where
The regulating objective is to make
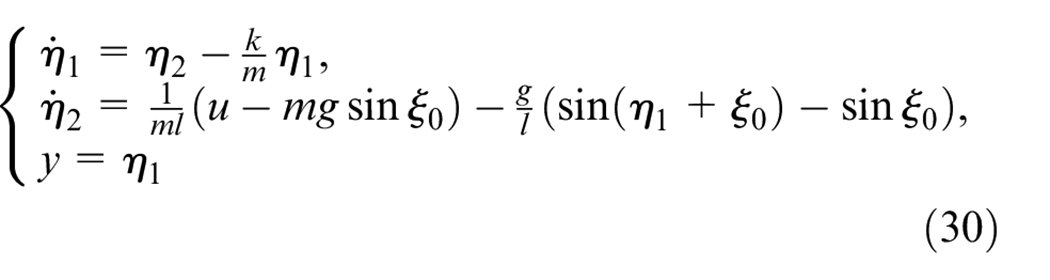
where
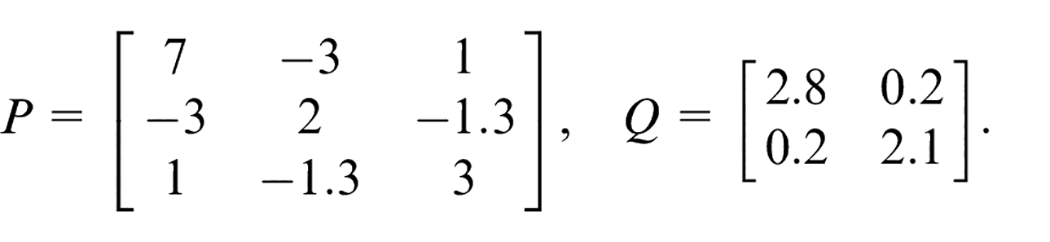
By setting
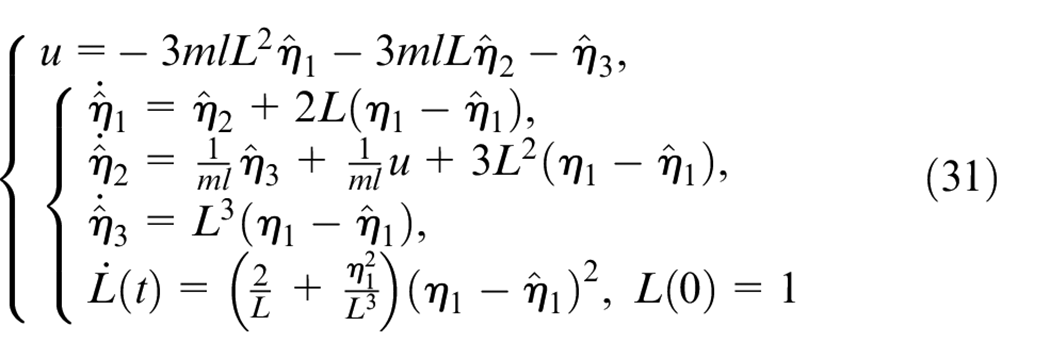
The matrices
and equation (7) holds when
Let
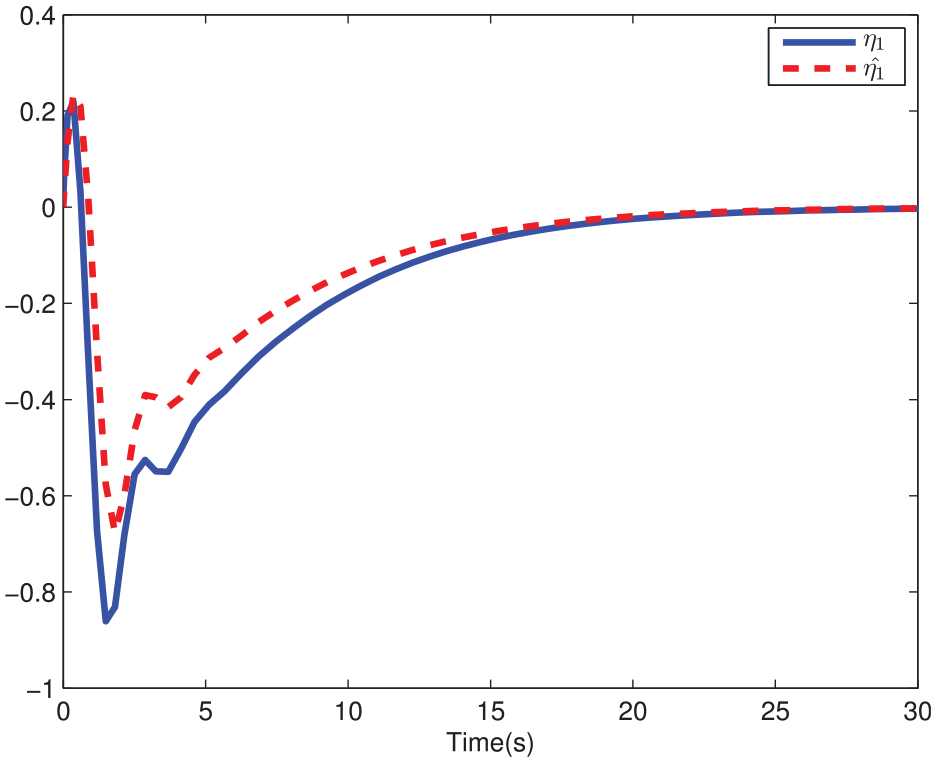
The trajectories of states
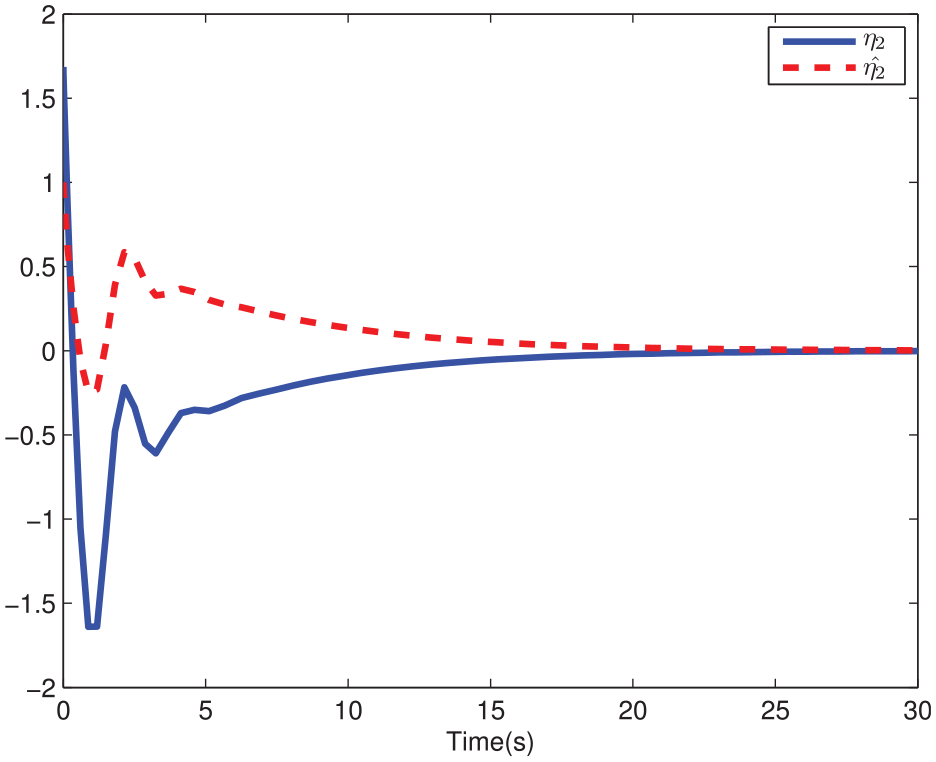
The trajectories of states
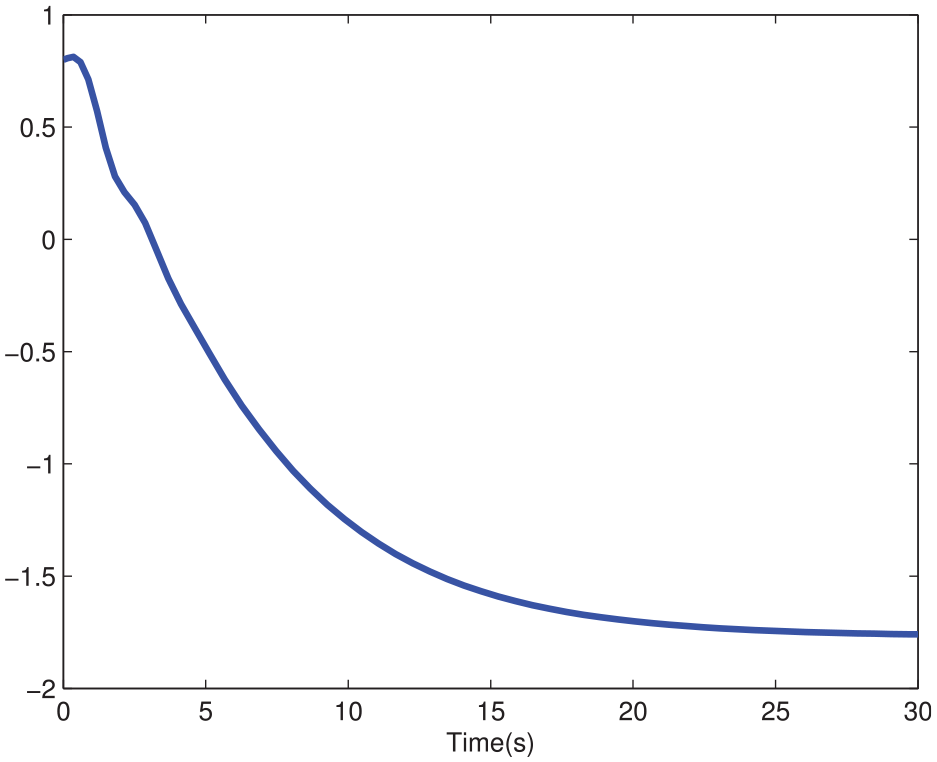
The trajectory of state
The trajectory of gain
The trajectory of
Conclusion
In this article, the global state regulation of a class of uncertain nonlinear systems with generalized control coefficients is achieved by adaptive output feedback. The key is to deal with the nonlinearities and serious unknowns of the system caused by the function control coefficients, the unknown constant growth rate, and input matching uncertainty. It is worth noting that the growth rate of the system is only an unknown constant. Apparently, the current approach is inapplicable to the case where the growth rate of the system is the polynomial function of the output, for which the exploration can be attempted in the future. In addition, we will try to investigate the adaptive event-triggered output-feedback problem for nonlinear systems with input matching uncertainty and function control coefficients.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 62073153) and Natural Science Foundation of Shandong Province (grant no. ZR2021MF004).