
Abstract
More and more semi-submersible platforms are being employed in the deep-sea industry as a result of the offshore oil and gas industry’s rapid growth, which also raises the bar for the positioning capabilities of semi-submersible platforms’ positioning systems. Model predictive control is frequently used in dynamic positioning control because it is effective at addressing a variety of limitations. Yet, there are still issues to be resolved regarding how to enhance model predictive control’s robustness under various working settings and how to offer workable solutions for model predictive control under stable conditions. The approach of stable fuzzy model predictive control for the dynamic placement of a semi-submersible platform is suggested in this research based on this. This method increases the tracking accuracy and tracking speed of dynamic positioning by incorporating the T-S fuzzy algorithm into model predictive control and allowing the coefficients in the weight matrix of the objective function to be modified adaptively. In addition, the solution is limited to the feasible domain by the addition of the control Lyapunov function, ensuring the stability and efficiency of the entire control procedure. A semi-submersible platform’s fixed-point control and trajectory tracking can be accomplished using the proposed technique, which has better trajectory tracking effects than the conventional model predictive control, according to comprehensive simulation findings.
Keywords
Introduction
The development of deep-sea oil and gas resources has gained attention in the oil and gas industry as a result of the depletion of land-based oil resources. Deep-sea oil and gas resources are frequently developed using semi-submersible offshore platforms. An essential technology for the operation of offshore drilling platforms is dynamic positioning, which enables a ship or floating platform at sea to autonomously maintain a fixed location and heading under its own power (without utilizing a mooring system). Proportional–integral–derivative (PID) control, linear quadratic regulator (LQR) control, backstepping control, and sliding mode control are examples of frequently used dynamic positioning control techniques. 1 PID controllers were among the first controllers used often in dynamic systems. 2 A PID control mechanism, developed by Philipp K, dynamically distributes modified variables to several thrusters. PID has several limitations for the control of nonlinear systems because PID parameter changes lack adaptivity.3,4 To enhance the control algorithm’s capacity for self-learning and adaptation, several researchers mix PID with neural networks.5,6
Following extensive theoretical and practical effort, several academics applied the control approach integrating Kalman filter and optimal control to the field of ship power positioning control based on contemporary control theory. In order to compare the PID controller with the LQR controller in ship power positioning, Tiwari and Krishnankutty 7 applied the LQR controller. The simulation findings demonstrate that the LQR controller offers better control when the control outcomes of the two controllers are compared. However, LQR has to deal with a high control issue. As a result, several academics have also experimented with different forms of control to prevent the issues brought on by LQR.
Power positioning control was given a novel adaptive filtering technique by Grimble for a group of systems with unidentified perturbations. 8 Since dynamic positioning systems are nonlinear, Fossen and Perez 9 introduced a Kalman filtering algorithm based on nonlinear systems with a technique that estimates unknown disturbances and has strong robustness to prevent mistakes brought on by approximation. However, the controller must rely on experience to modify the control settings, which means that conventional control methods are unable to adequately handle the dynamic positioning of semi-submersible platforms.
A dynamic localization of an unmanned aircraft with an unknown affiliation function based on sliding mode output feedback was proposed by Hao et al. 10 In order to guarantee the transient and steady state performance of trajectory tracking, Wang et al. 11 employed a perturbation observer to observe the disturbance and integrated it with a provided performance function. An auxiliary dynamical system was introduced by Yang et al. to address the actuator’s input saturation. Yu et al. 12 proposed the idea of a terminal sliding mode to ensure that the system state reaches the system equilibrium point within the time that can be calculated. This control method guarantees the robustness of the sliding mode control under perturbations, improves the control accuracy, and reduces the system convergence time. Hassani et al. 13 proposed a robust controller that presents a new and more suitable theoretical approach to efficiently obtain linearized design models. Piao et al. 14 designed an adaptive inversion algorithm and optimal controller based on the cerebellar model with the addition of a tracking differentiator to eliminate jitter in the initial phase of the system. Qin H 15 proposed a windproof compensator-based trajectory tracking control strategy for unmanned surface ships subject to input saturation constraints and full-state constraints. Besides, intelligent control methods such as event-triggered control16–18 and predictive performance control19–21 have been applied to dynamic positioning control. However, due to the many parameters of semi-submersible marine platforms and the complex and variable motion environment, it is difficult to establish high-precision and accurate parameter models, which leads to the difficulty of traditional control methods based on high-precision models to meet the precise requirements for dynamic positioning of the semi-submersible platform. In addition, most of these studies did not consider the propulsion and work area constraints.
Model predictive control (MPC) has been very successfully applied and developed rapidly in industries as diverse as oil, power, and aviation. MPC is an effective control method developed in the course of industrial practice. However, there are few studies that apply MPC to the dynamic positioning control of offshore platforms. Compared with other algorithms in modern control theory, the model prediction control algorithm does not require a high model, can solve the model fit problem well, and has a certain degree of predictability, which is better than the traditional PID control algorithm. The model prediction control algorithm meets the control requirements of the motion trajectory of the ocean platform, and the model prediction algorithm has more advantages than other algorithms in processing the dynamic positioning constraints of the semi-submersible ocean platform. However, just applying the traditional MPC algorithm to the power positioning control of the offshore platform will lead to two problems: (1) the weight matrix of the objective function of the traditional MPC algorithm is fixed. (2) Since the goal of traditional MPC is to find the optimal solution to control in finite time, it cannot guarantee that the control input generated by traditional MPC can make the system state converge to the trajectory at the origin under long-term control.
Many scholars have also studied the above two problems. Yu et al. 22 proposed an improved MPC controller that can dynamically adjust the weight matrix in the objective function according to the reference trajectory curvature so as to improve the tracking accuracy of the trajectory. However, it is difficult to balance multiple constraints of the system by just changing the size of the weight matrix overall rather than adjusting individual weights in the weight matrix according to the trajectory changes. Liu et al. 23 proposed a multi-objective weight optimization method for a nonlinear model predictive controller (NMPC) based on a genetic algorithm and performed simulations. The simulation results show that the controller with real-time multi-objective optimized weight coefficients has a better trajectory tracking effect than the one with constant weight coefficients. However, the huge computational effort of the genetic algorithm poses difficulties for the solution of the control algorithm. Romdlony and Jayawardhana, 24 Wu et al. 25 theoretically demonstrated the stability of traditional MPC algorithms. Romdlony M Z added the terminal cost function derived from the Lyapunov equation to the objective function to ensure the stability that is often neglected in traditional MPC. A control method that balances stability and safety was proposed by Wu et al., 25 Wu et al., 26 Sontag 27 in the literature and incorporates MPC, thus ensuring simultaneous closed-loop stability and process operation safety with recursive feasibility. In the literature,24,26,27 stability proofs are presented only theoretically and are not applied to practical control systems.
Although many scholars have made many efforts to improve the control effect of the model prediction algorithm, there are still some unsolved problems when the optimized MPC algorithm is applied to the dynamic positioning control of offshore platforms:
The selection of the weight matrix is still a difficult problem: The fixed weight matrix cannot well meet the control requirements of the system under different working conditions, and the dynamic planning of the weight matrix may require a lot of calculations.
The terminal constraint is related to the objective function, so when the prediction interval length of the objective function is not selected properly, it will affect the judgment of stability. And the presence of terminal constraints increases the online optimization burden of the system and makes real-time control of the system difficult.
The addition of control Lyapunov function (CLF) makes the system state converge exponentially along the prediction interval, and this constraint will be gradually stricter with the prediction length, which may lead to an unsolvable system.
At present, there are few literatures on fuzzy MPC methods based on dynamic programming weight, and this method has not been applied to dynamic positioning control of offshore platforms, which is a worthy research direction. CLF has also not been used in the stability analysis of offshore platforms. Motivated by this, we propose a method of stable fuzzy model predictive control (SFMPC) for the dynamic positioning of a semi-submersible platform. The main contributions of this article are as follows:
Dynamic adjustment of the weights of the objective function with the T-S fuzzy algorithm is proposed to optimize the trajectory tracking effect.
The CLF constraint is proposed in solving the quadratic programming to ensure that the solution of the state space is constrained within the safety interval that makes the system stable. And slack variables are added to relax the stability constraints of the system, thus improving the solvability of the system.
Extensive simulations and experiments demonstrate that the validity and accuracy of our approach are better than the traditional MPC, and our approach can effectively achieve fixed-point control and trajectory tracking of the semi-submersible platform.
The rest of this article is as follows: it describes the preliminary preparation of the dynamic positioning control problem, completes the design of the MPC-based controller, and acts on the dynamic positioning system of the marine platform in section “Method.” Simulation results and detailed analysis are given in section “Result.” Section “Discussion” analyzes the advantages and disadvantages of the methods proposed, and section “Conclusion” summarizes the conclusions.
Method
As shown in Figure 1, this article establishes the marine platform dynamics and kinematics model, takes the displacement error and bow-phase error of the marine platform, as well as the linear velocity and angular velocity error as the weight matrix of the T-S fuzzy algorithm input change and coordination objective function, and combines MPC and Lyapunov function to realize the stable tracking of variable weight trajectory under different working conditions, so as to improve the accuracy, stability, and working condition self-adaptability of the marine platform power positioning control.
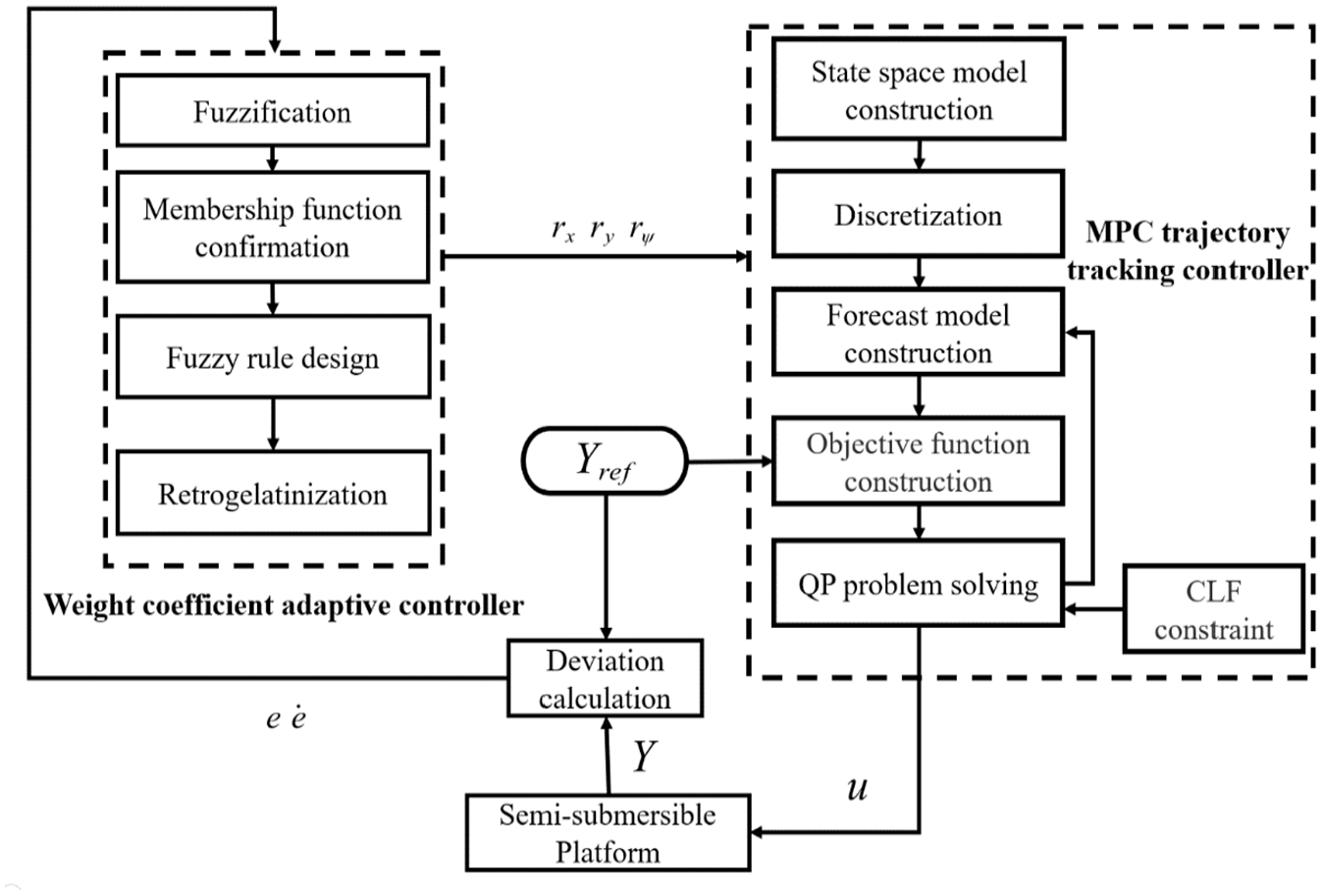
Stable fuzzy model predictive control for dynamic positioning of semi-submersible platform.
Mathematical model of semi-submersible platform
The motion of the ocean platform includes six directions of freedom: Heave, Sway, Surge, Pitch, Roll, and Yaw. Since the dynamic positioning only considers the motion in the horizontal direction, the dynamic positioning control of the ocean platform only considers the motion in three directions: Surge, Sway, and Yaw. The relationship between the two coordinates is shown in Figure 2.
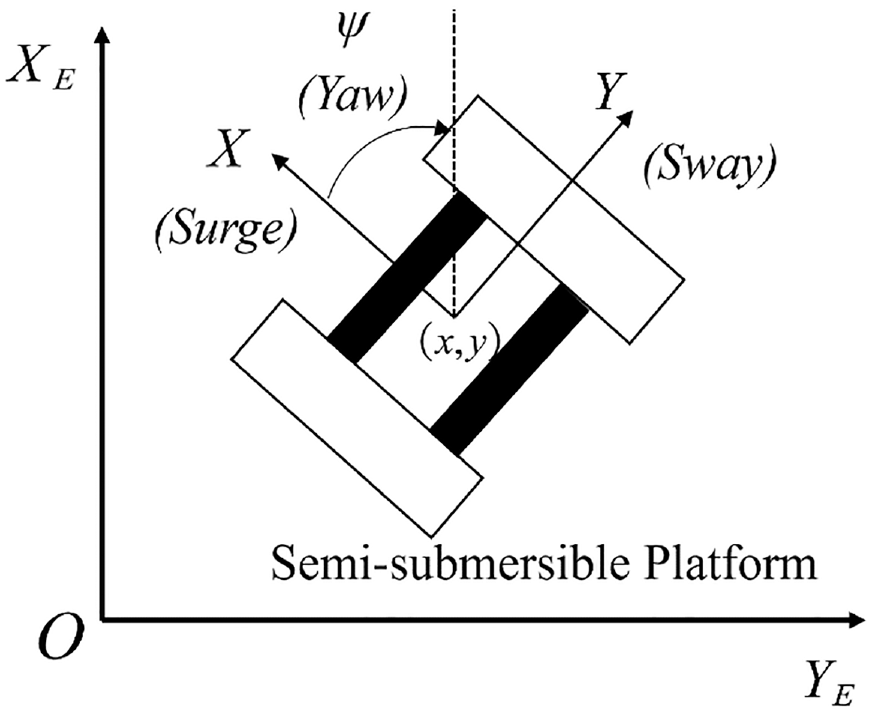
Schematic diagram of inertial coordinates and coordinates.
The position vector in the platform coordinate system is


The marine platform is simultaneously affected by the thruster torque, external environmental load, damping, waves, and sea wind during the motion, producing the motion as shown in Figure 3. However, since the dynamic positioning only considers the motion trajectory control in the horizontal plane, we only need to consider the equations of translational and rotational motion in three directions of longitudinal and transverse oscillations as well as bow-rocking of the ocean platform under the action of low-frequency signals according to the momentum theorem.
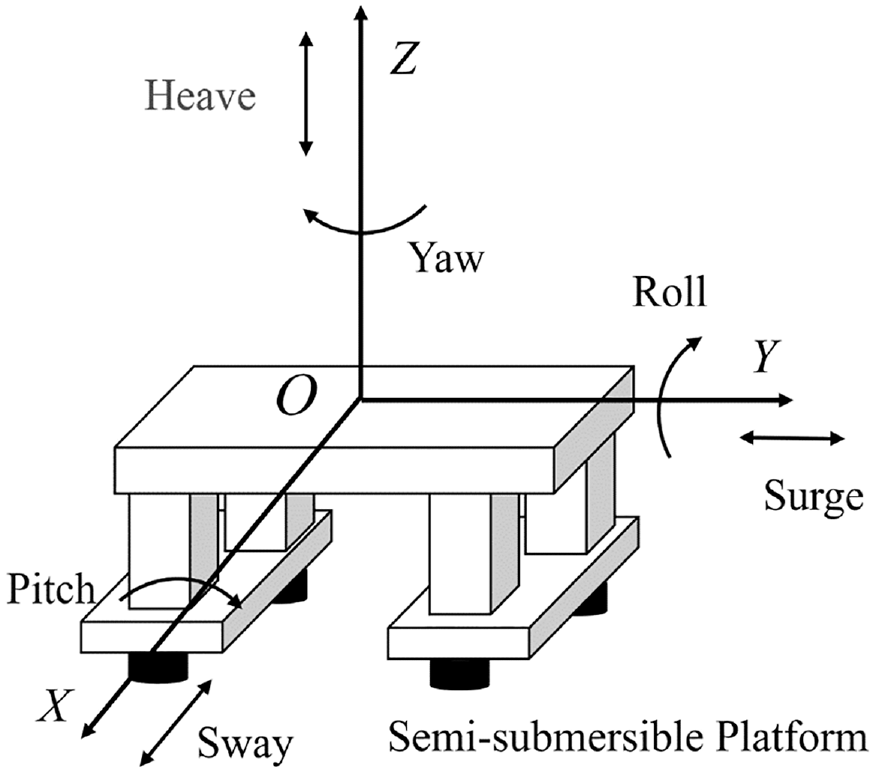
Ocean platform kinematic model.
The low-frequency model of the platform is expressed as Equation (3)
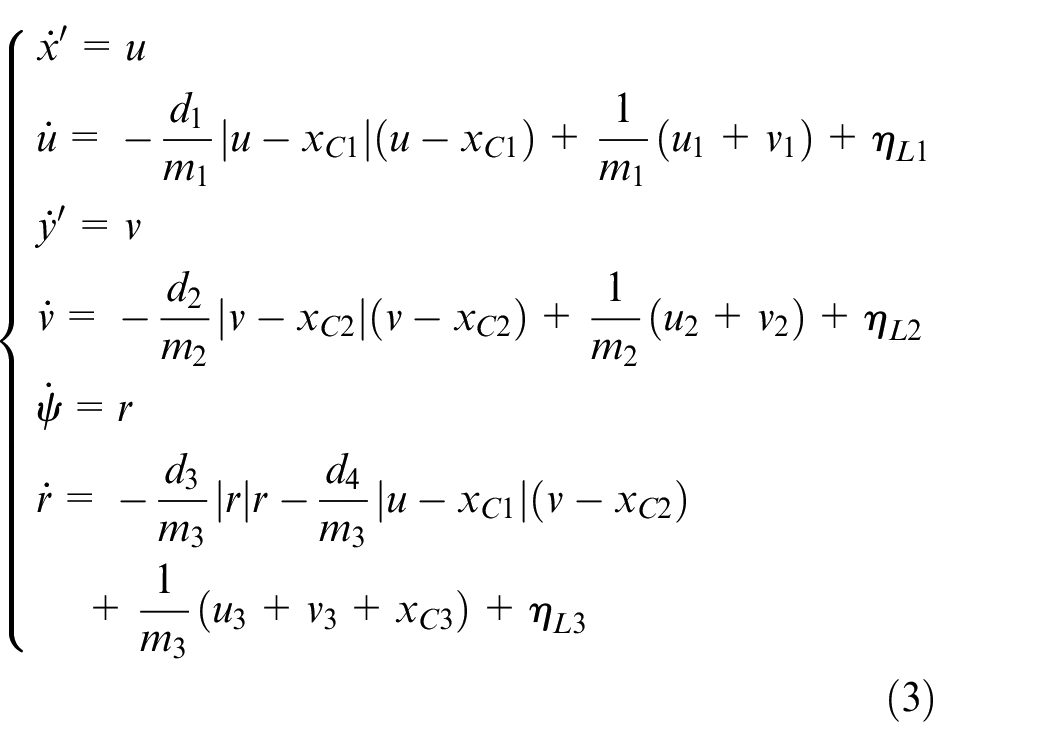
where
Nonlinear system MPC
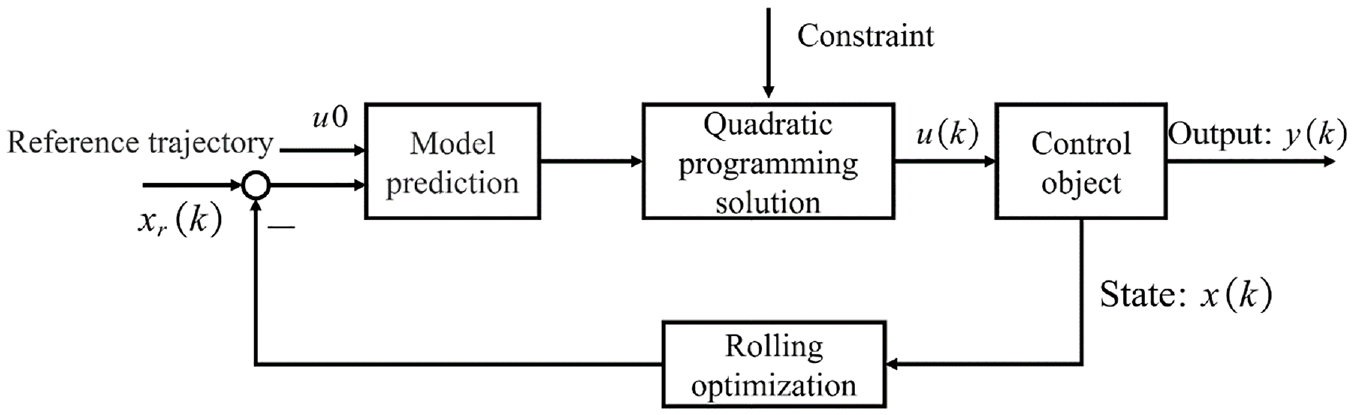
As shown in Figure 4, MPC is a process consisting of model prediction, rolling optimization repetitive feedback correction. At each sampling time, the process and prediction models are executed separately to obtain the actual and predicted outputs. Next, the system corrects the predicted output by the error between the actual output using the predicted output and feedback, and then repeats the measurement and optimization.
T-S fuzzy MPC.
Where M is the mass matrix, D is the damping matrix, and

The system is linearized at each reference trajectory point, and the higher-order terms are ignored
Then

Since the matrix


where

After discretization by the Euler’s method, the discrete linear time-varying system is expressed as

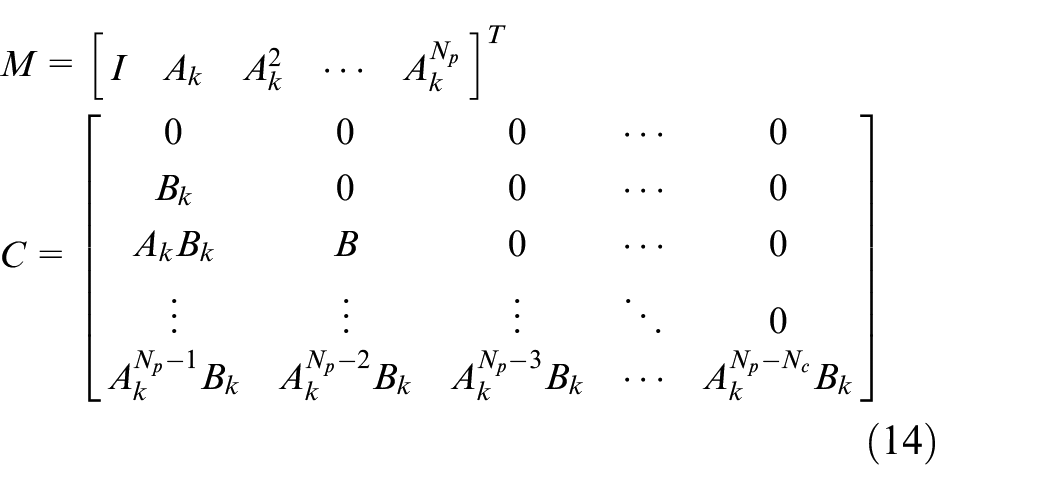
After discretization for prediction processing, let the prediction step be

where


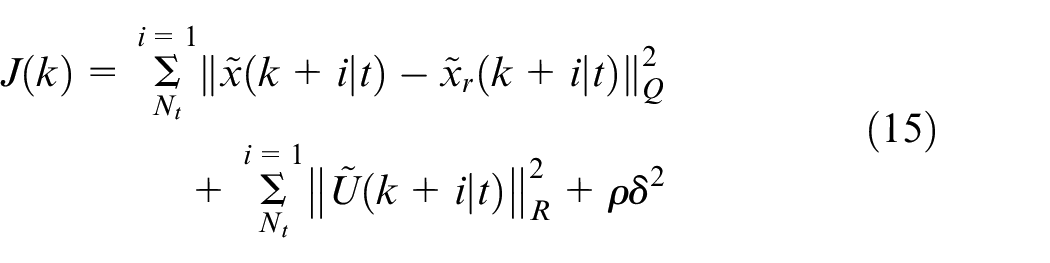
Within the forecast interval, the cost function is established for the optimal solution and the minimum of the objective function Equation (15) is obtained. For the objective function expressed in the Equation (15), the first term represents the accuracy of the dynamically positioned tracking trajectory of the ocean platform, while the second term represents the stability of the input thrust and thrust moment of the ocean platform, and
Thus, the quadratic programming function can be written as

where
The solution of the quadratic programming problem is used as the current input to the system. As the motion and position of the ocean platform change, the model prediction and rolling optimization need to be repeated at the next moment, and the state quantities are again acquired to construct the quadratic programming problem to predict the state variables and control variables afterwards.
T-S fuzzy algorithm to optimize the weight parameters
For MPC control model

The constrained extremum solution can be expressed as a Lagrangian function for the unconstrained extremum problem
to obtain

The H and g matrices are related to the weight matrix Q. Therefore, the amount of control is influenced by the Q matrix, which in turn affects the effect of the output control trajectory. However, the current Q and R matrices are based on trial and error. If the Q and R matrices are not taken appropriately, the trajectory cannot be tracked but will be oscillated and scattered, and it is time-consuming to get the appropriate Q and R matrices by trial and error. Therefore, the accuracy and stability of MPC for trajectory tracking depend on the input weight matrix Q and the output weight matrix R. The choice of Q and R will affect the experimental results.
In order to improve the adaptivity of MPC’s weight matrix for different trajectories and positioning endpoints, a fuzzy algorithm is introduced in MPC. Let
In order to dynamically adjust each coefficient in the weight matrix, a fuzzy rule is introduced; the goal is to make the ocean platform track fast with smoothness and accuracy under different desired trajectories, while satisfying the constraints. Therefore, the position error and velocity error are used to determine the input weight matrix Q for the next moment. When the trajectory is not followed, the desired position needs to be reached quickly or the desired trajectory needs to be followed; if the trajectory is about to be followed, the bow angle is more demanding at this time, and the desired trajectory or desired position needs to be reached more smoothly to avoid the generation of oscillations in the actual trajectory.
In T-S fuzzy theory, the output variables are linearly related to the input variables. The relationship between output variables and input variables is expressed as

Therefore, let the domain of the T-S fuzzy theory input variable e be [−3; 3] and the domain of
Output variables of T-S fuzzy algorithm.
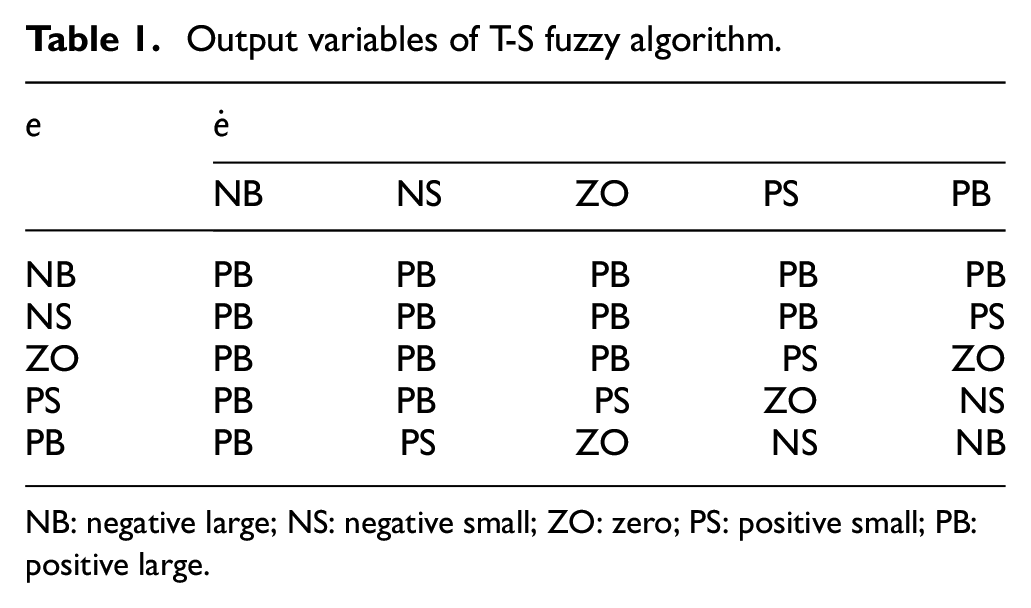
NB: negative large; NS: negative small; ZO: zero; PS: positive small; PB: positive large.
The output obtained by the T-S fuzzy algorithm is used as the gain of the adjusted weight matrix to obtain the new weight matrix. The relationship between the new weight coefficients and the output of the T-S fuzzy algorithm

As shown in Figure 5, the new weight coefficients obtained are substituted into the objective function in the CLF-MPC controller and the predicted value for the next moment is adjusted by changing the objective function.
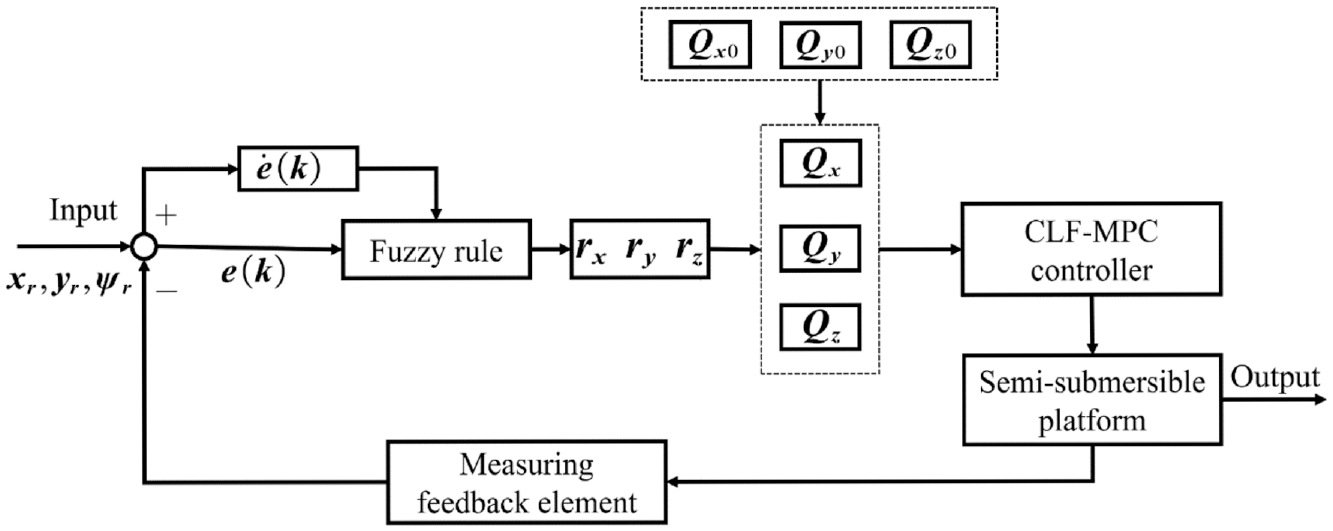
T-S fuzzy MPC.
CLF constraints and control volume constraints
The Lyapunov function is a common method to prove the stability of nonlinear systems.28,29 For time-invariant nonlinear affine systems Equation (23)

where
For nonlinear systems, MPC itself lacks the judgment of stability: the quadratic programming function (QP) may be solved to an unstable solution, making the subsequent output oscillate. In this article, we construct the Lyapunov function for each output point by adding CLF to QP to ensure that the state variables solved to the system converge asymptotically to the equilibrium point
Definition (CLFs)
A continuously differentiable function

Then,
where

Solving the differential equation

Thus, the system satisfying Equation (25) is exponentially asymptotically convergent, as shown in Figure 6.
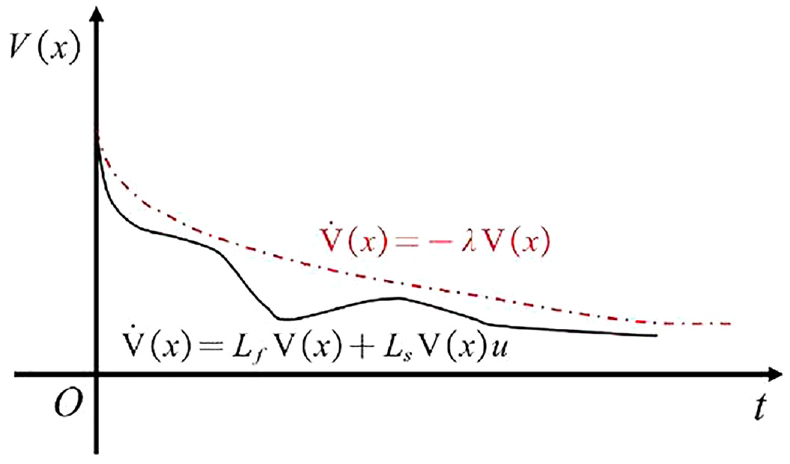
CLF with progressive index stabilization.
For the control system, we can consider the continuous time algebraic Riccati equations 6

Due to Hurwitz assumption, for any
The relationship between Q and P has to be satisfied (Equation (28))

The value of λ can be determined by Q and P

Defining

Then there is

From which it follows that

So, we can always find a control quantity u that satisfies
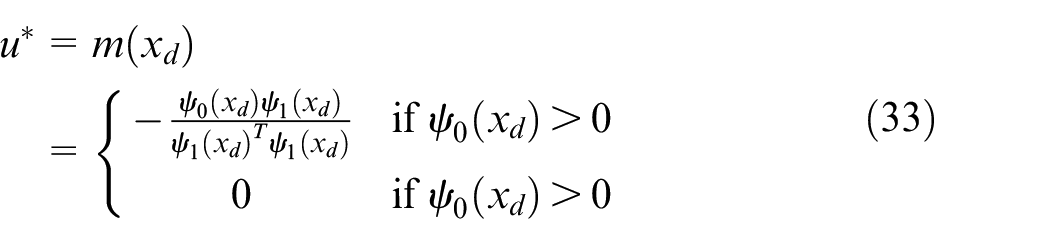
where,

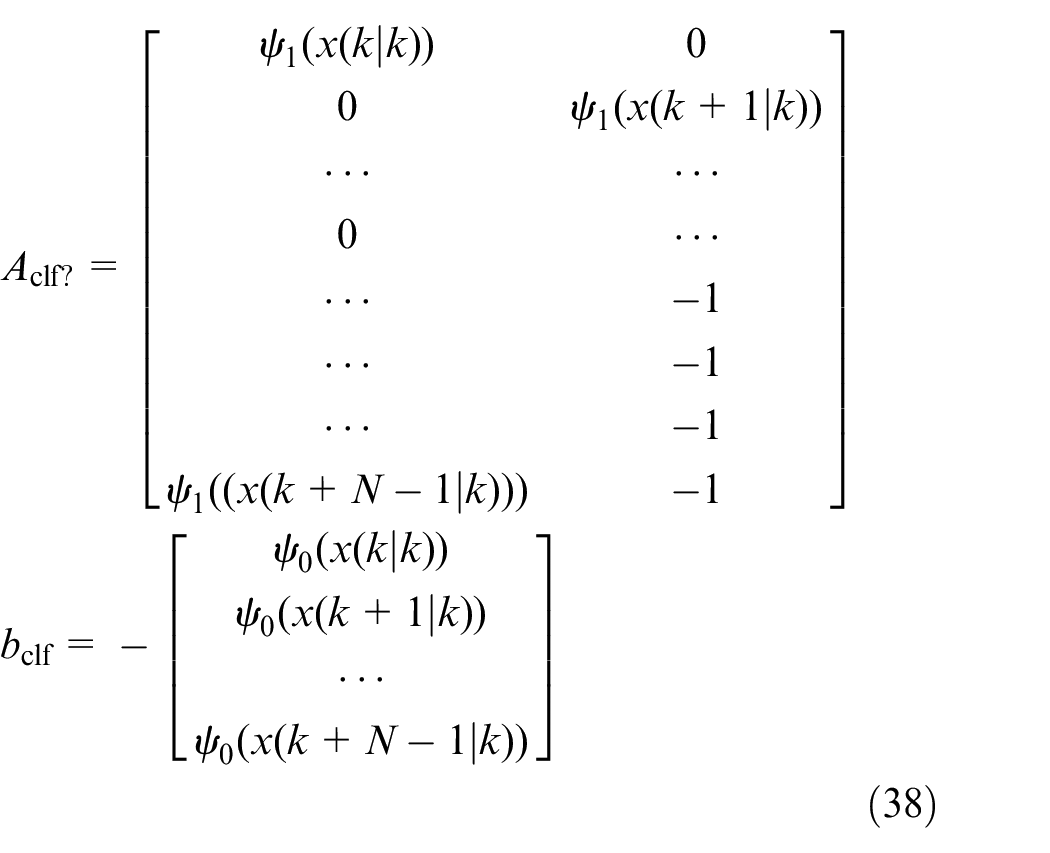
It should be noted that the selection of control quantity also needs to be done through quadratic programming, so the stability inequality is included as the judgment condition of the quadratic programming problem
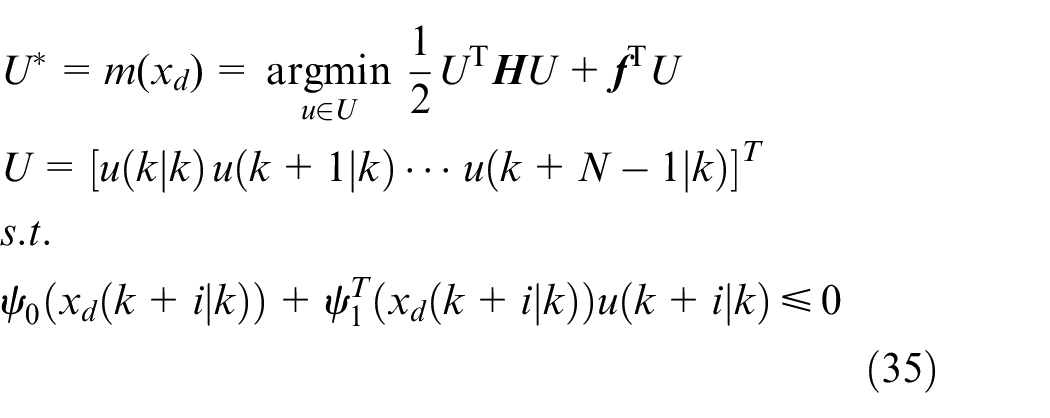
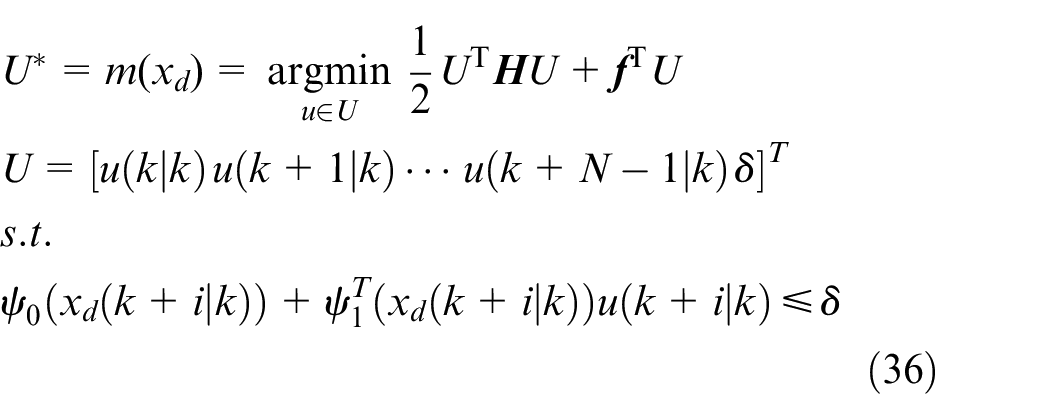
Since strict constraints on the QP problem may lead to the occurrence of no solution, a relaxation factor is added to Formula (35) to improve the feasibility of the problem
The MPC system output eventually acts on the actuator such as the marine platform thruster, and since the actuator has a large and high-frequency action that affects the stability and safety, and the thruster thrust and thrust moment have constraints, the control amount constraint is introduced, so that the marine platform thruster thrust and thrust moment do not exceed the constraint.
With the addition of the asymptotic exponential CLF constraint and the control volume constraint, the MPC controller model can be expressed as follows
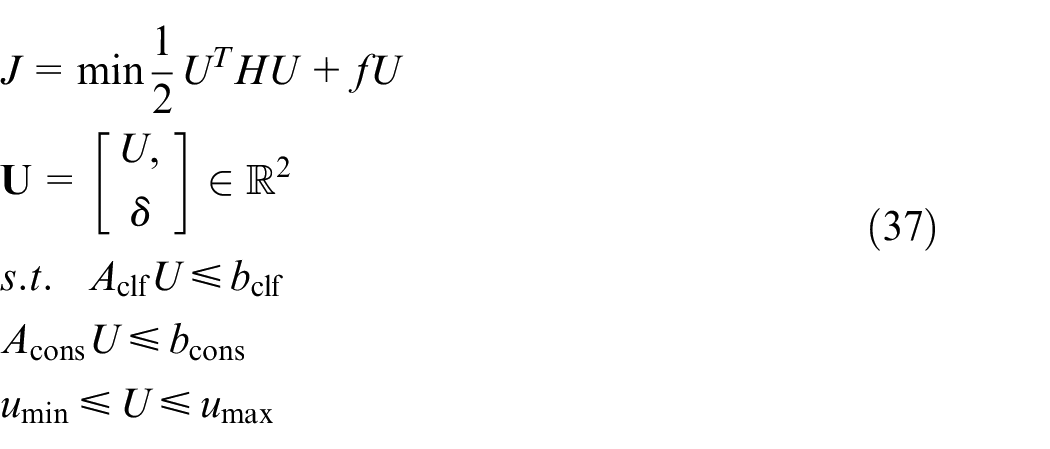
where
This section accomplishes two tasks: (1) always ensuring the stability of the system safe nonlinear system and (2) satisfying the system requirements for the control quantities. Specifically, the constraints on the input variables are considered in the calculation of the quadratic programming function, and the constrained control Lyapunov potential function is used to design the implicit control rate. Using the MPC control output as the initial variable, the solution of the subsequent nonlinear system is guaranteed to converge to the steady state with the input variable constraint and is shown to be recursively feasible and stable to ensure that a set of states in the state space associated with unsafe operating conditions is avoided under the sampling and holding control action implementation.
Results
In practical engineering applications, dynamic positioning needs to consider the demands of different aspects comprehensively and balance the contradictions between different demands. Moreover, the optimization process needs to meet the constraints and stability requirements of the actual driving state, so the constraints should be designed at the same time. Dynamic positioning control first requires that the platform can quickly reach the desired trajectory under the condition of satisfying the safety, so the followability of the platform needs to be considered. The stability of dynamic positioning is also very important, so it also needs to be considered. Therefore, the following and stationary performance indexes are selected as optimization objectives, and the requirements for stability and workspace restrictions are taken as constraints.
Followability performance index. The basic requirement of dynamic positioning control is to quickly achieve the desired trajectory or position. The following includes two aspects: the following of platform speed to the desired speed and the following of actual position to the desired position. Therefore, it is necessary to make the position error and velocity error gradually converge to zero over time.
Stability performance index. For dynamic positioning control, in addition to good following performance, it is necessary to ensure that the motion trajectory is more stable in this process. Therefore, stability should also be considered in the performance index. In this article, the definition of stationarity is that in the process of trajectory tracking, the movement path of the platform avoids excessively large oscillations.
Constraints. The constraint conditions include the maximum thrust that can be generated by the propeller, the position state constraint, and the stability constraint generated by the surface obstacles.
Therefore, this article puts forward an algorithm for the control requirements of various targets, establishes a control framework for model prediction, adopts fuzzy control theory according to different types of working conditions for different targets, and puts forward a variable weight coefficient method which can adapt to the complex environment and working conditions while ensuring the stability of semi-submersible platform.
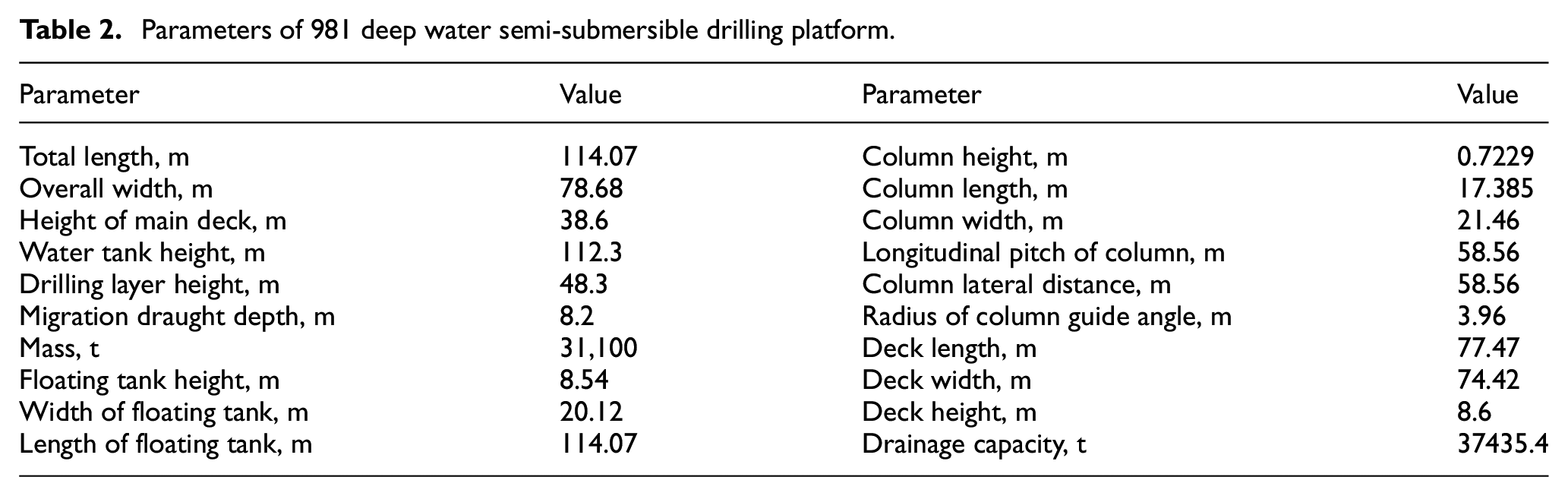
In order to verify the effectiveness of the SFMPC proposed in this article, based on the numerical model of 981 deep water semi-submersible drilling platform, two positioning methods are simulated in the actual working conditions of the semi-submersible platform, which are fixed-point tracking and trajectory tracking. The numerical model of the 981 deep water semi-submersible drilling platform is shown in the Table 2, then the mass matrix M and damping matrix D of the semi-submersible platform are as follows
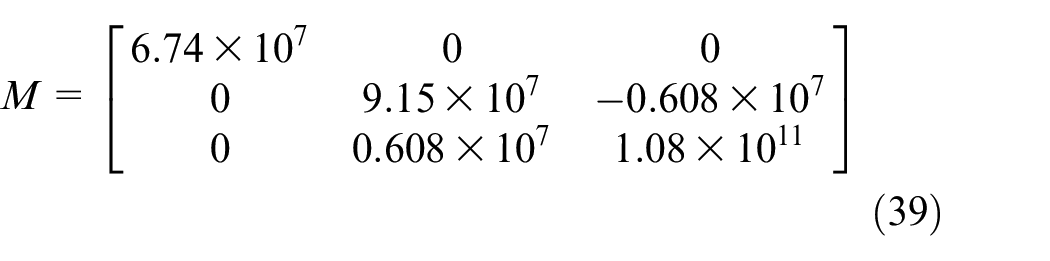
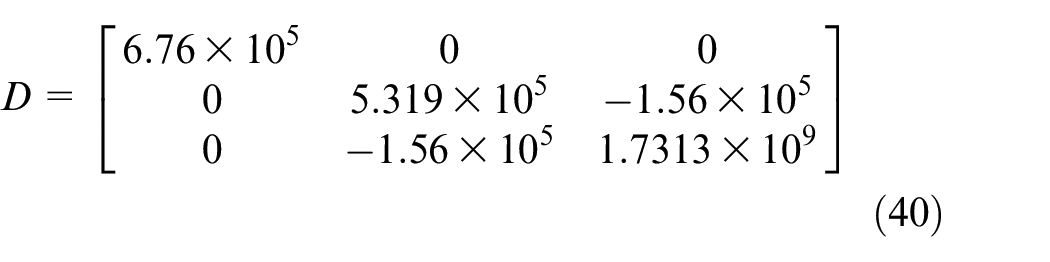
Parameters of 981 deep water semi-submersible drilling platform.
Furthermore, in order to analyze the advantages of the method proposed in this article, the accuracy and efficiency of the traditional MPC and the SFMPC proposed in this article are compared.
Fixed-point tracking
The simulation parameters for fixed-point tracking are set as follows: the initial position is
The simulation results of the conventional MPC and the proposed method are shown in the Figure 7, from which it can be seen that although both control methods can reach the fixed point under specific working conditions, the output of SFMPC method reaches the steady state earlier than that of the conventional MPC. In addition, it can be seen from the thruster output force and moment plots that, thanks to the T-S fuzzy algorithm that dynamically adjusts the weight matrix of the MPC, the thruster output can be quickly adjusted under specific working conditions, thus making the proposed algorithm more efficient than conventional algorithms.
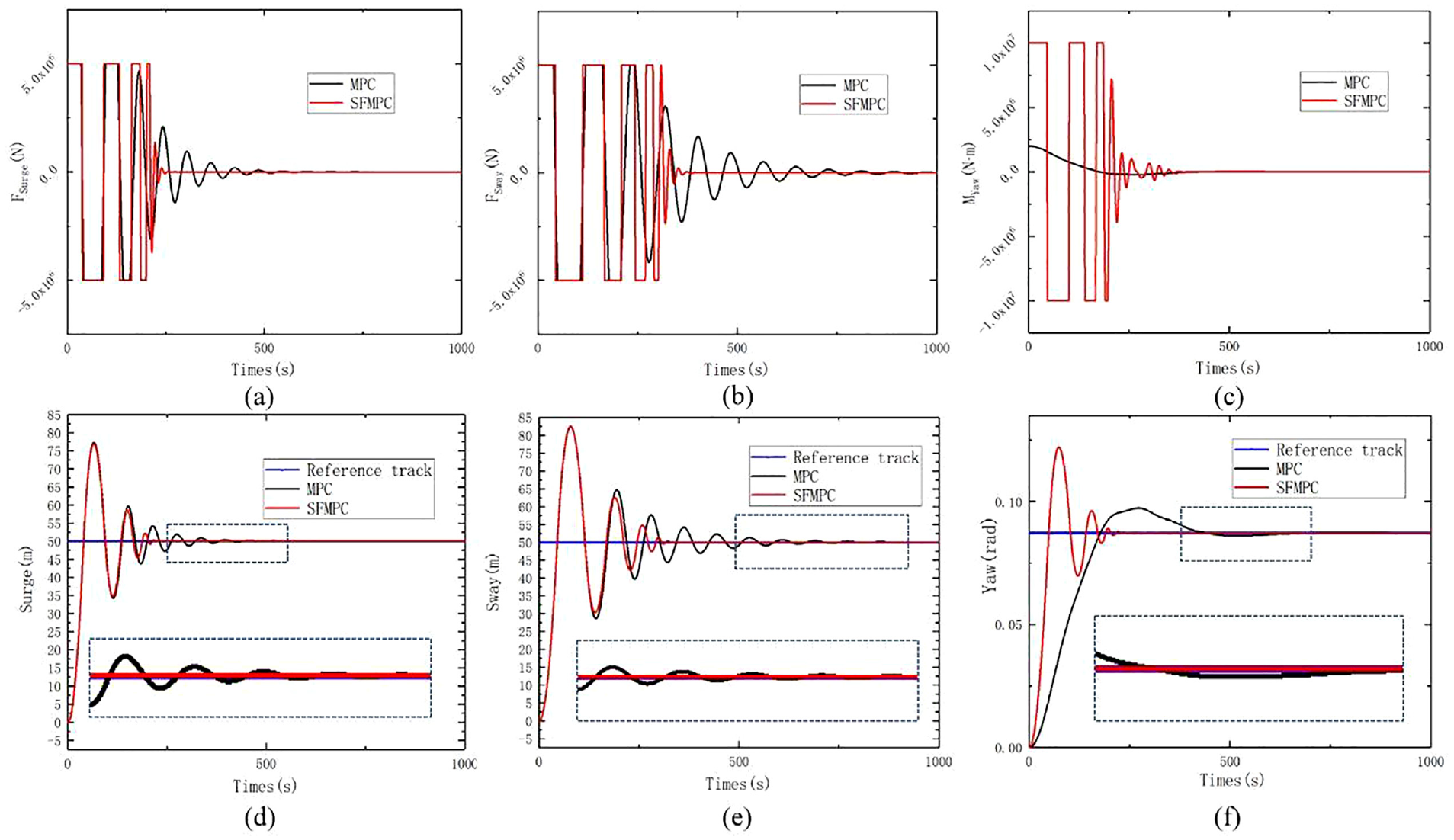
Simulation results of fixed-point tracking: (a) the force in the surge direction, (b) the force in the sway direction, (c) the moment in the yaw direction, (d) the position of surge, (e) the position of sway, and (f) the position of yaw.
Next, we analyze the accuracy of the two algorithms by comparing the error in the fixed-point tracking process. From the Figure 7, it can be seen that the errors in the fixed-point tracking process of the proposed algorithm are basically smaller than that of the traditional MPC method. The total error in the fixed-point tracking process is shown in the Table 3. It can be seen that compared with traditional MPC, the total error of SFMPC decreases 7.78%, 17.49%, and 50%, so T-S MPC is more accurate than traditional MPC.
Accumulated error of fixed-point tracking.
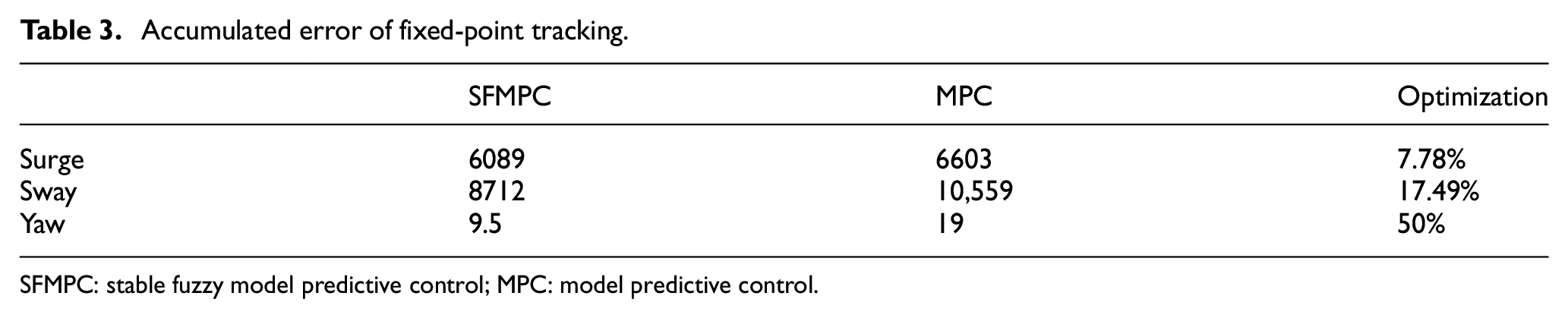
SFMPC: stable fuzzy model predictive control; MPC: model predictive control.
Trajectory tracking
The simulation parameters for trajectory tracking are set as follows: the initial position is
The simulation results of the conventional MPC and the proposed method are shown in the Figure 8, from which it can be seen that the T-S MPC can follow the reference trajectory at the 1.5 s, while the conventional MPC tracks the reference trajectory at the 6 s. This means that in the trajectory tracking case, the SFMPC method also reaches the steady state earlier than the conventional MPC (Figure 9).
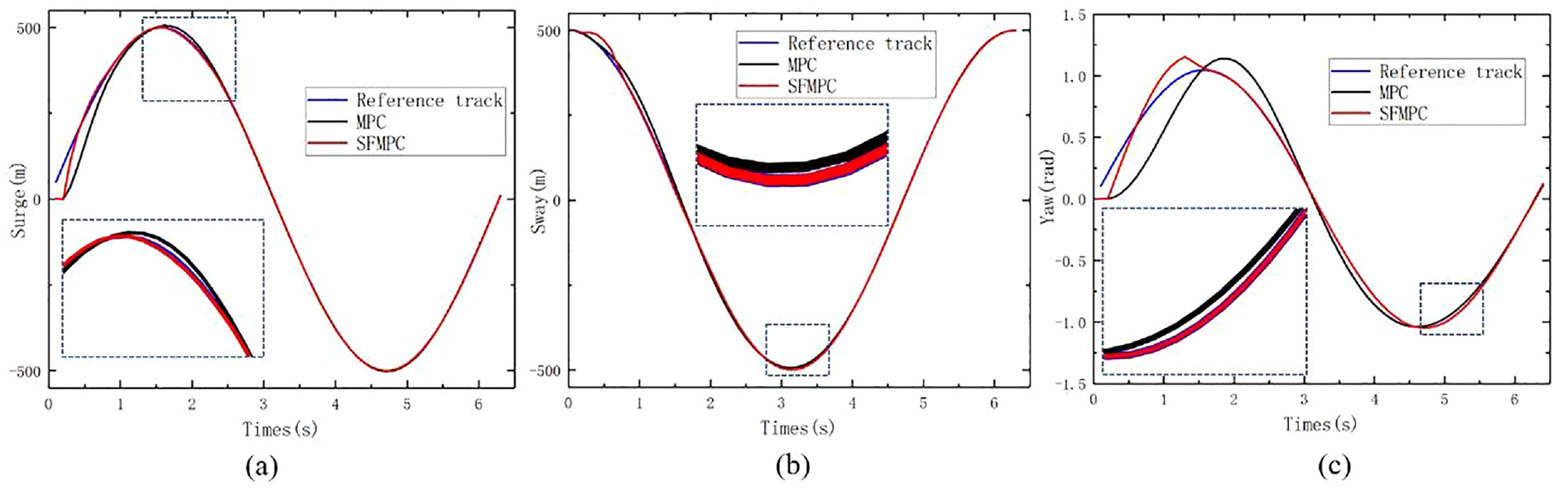
Simulation results of trajectory tracking: (a) the position of surge, (b) the position of sway, and (c) the position of yaw.
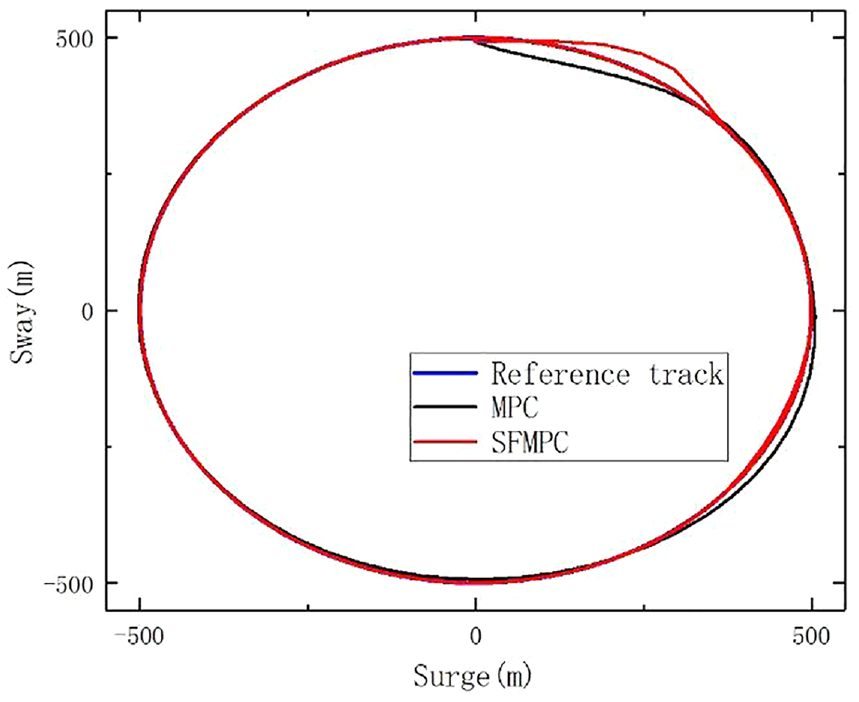
Simulation results for the trajectory tracking.
Similarly, we analyze the accuracy of the two algorithms by comparing the errors in the trajectory tracking process. From the Figure 8, it can be seen that the trajectory fluctuation of TS MPC algorithm is smaller than that of traditional MPC. In addition, the total error in the trajectory tracking process is shown in the Table 4. It can be seen that compared with traditional MPC, the total error of SFMPC decreases 65.45%, 60.45%, and 77.79%. Therefore, similar to fixed-point tracking, T-S MPC is more accurate than conventional MPC in trajectory tracking.
Accumulated error of trajectory tracking.
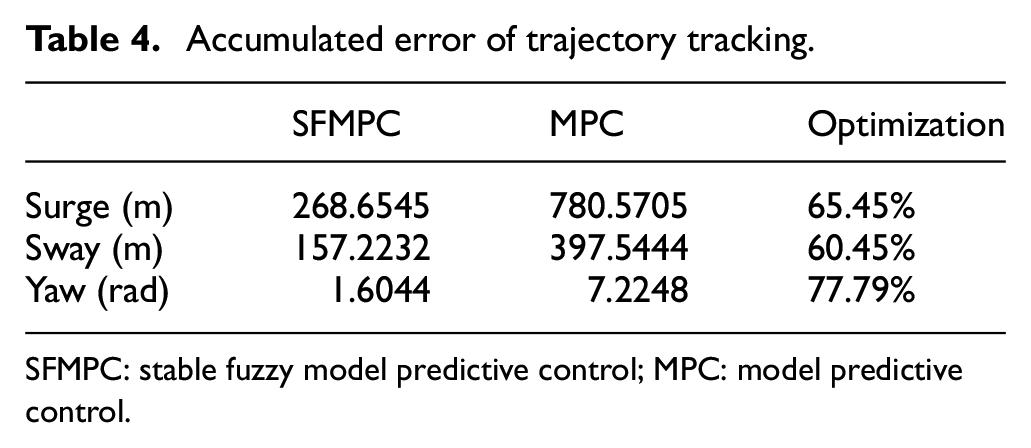
SFMPC: stable fuzzy model predictive control; MPC: model predictive control.
Different working conditions
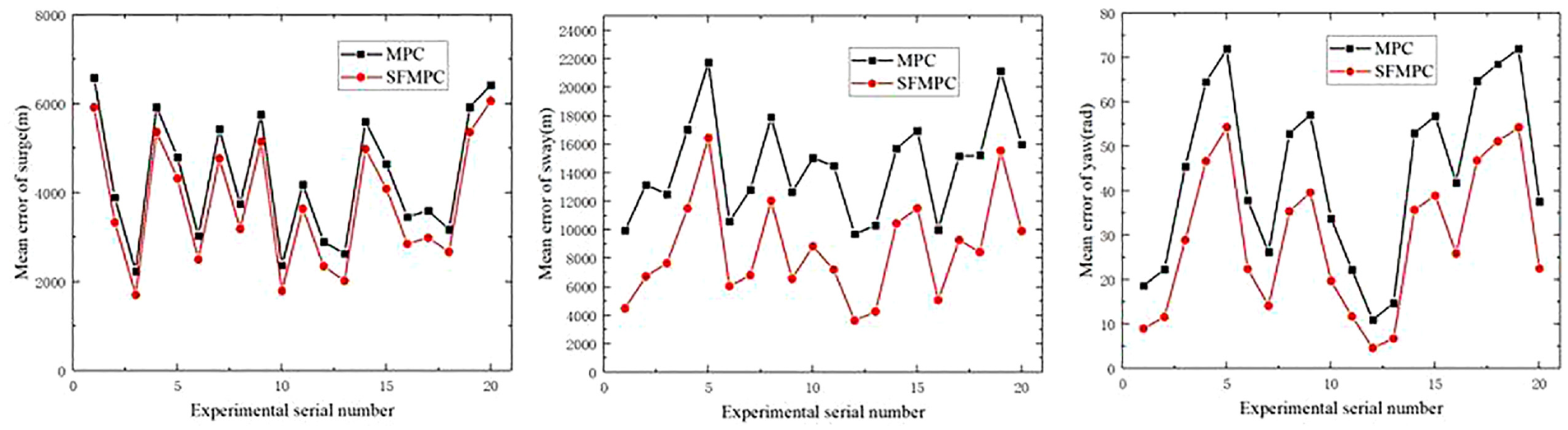
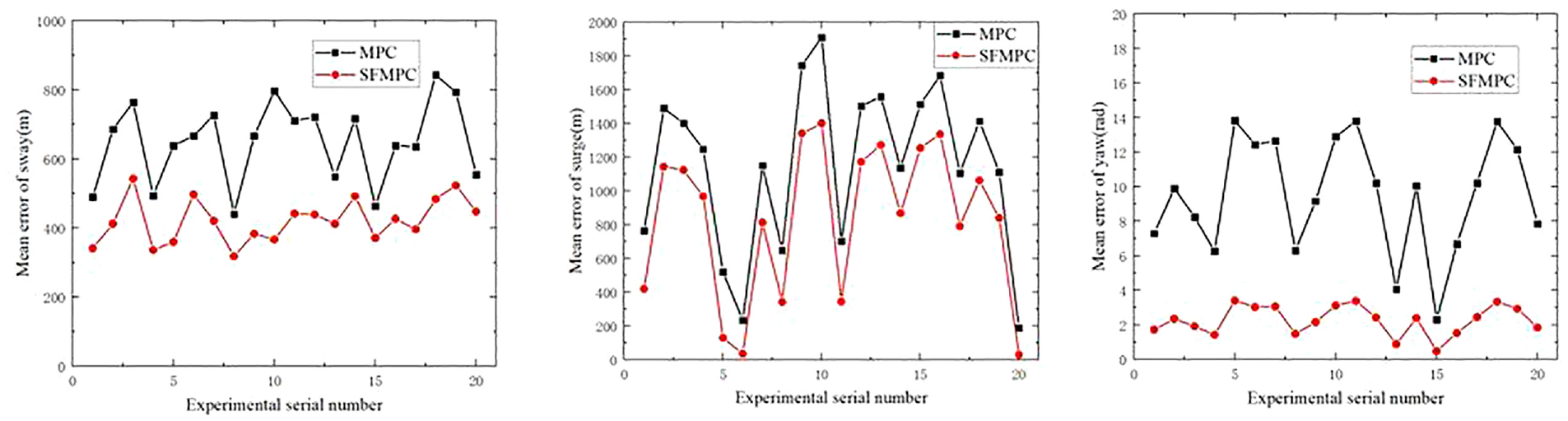
In order to verify the advantages of fuzzy MPC in dynamic positioning, we randomly select 20 different endpoints and 20 different trajectories and use MPC and the proposed SFMPC to control and compare the control results. Fixed-point tracking randomly selects 20 expected points from
Comparison of the sum of fixed-point tracking errors for random trials.
Comparison of the sum of trajectory tracking errors for random trials.
Discussion
The system of offshore platform maintained at a given position by thruster is called offshore platform dynamic positioning system. As the core of the system, control technology has always been a research hotspot. Existing control algorithms often require high-precision models, but it is difficult to obtain accurate models of offshore platforms, and the model prediction algorithm has low accuracy requirements, so this article considers using the model prediction algorithm. However, it is found in the literature research that the control effect of traditional MPC depends on the selection of weight matrix, and the change of working condition may bring bad control effect; the stability analysis of MPC is less in engineering control. Terminal constraints are often used in the stability of NMPC. Terminal inequality constraints increase the burden of online optimization and weaken the real-time performance of the system. Terminal equality constraint stability depends heavily on the selection of prediction interval length. Therefore, this article considers adding fuzzy algorithm to adjust multiple weight values and the CLF is designed as a stability constraint for QP problems. Although some scholars have proposed fuzzy MPC algorithm, which can improve the control effect of the system to a certain extent. But these fuzzy models predictive control method mainly applies the fuzzy algorithm to the system model recognition. Some fuzzy MPC algorithms consider weight adjustment but only adjust a single coefficient or lack stability judgment for nonlinear systems. Based on the above analysis, the advantages of the algorithm proposed in this article are as follows:
The addition of fuzzy algorithm can change the size of the weight matrix according to the state of the system, thus affecting the output control quantity, so as to optimize the control effect. Compared with the traditional MPC, it has stronger adaptability, can adapt to a variety of working conditions, and avoid frequent adjustment of parameters.
The inadequacy of terminal constraints in ensuring system stability is addressed by adding CLF constraints, which makes the system exponentially controllable.
Relaxation variable is added to CLF to improve the feasibility of the system.
In the simulation experiments, the proposed method is compared with the traditional MPC method. The results show that the performance of SFMPC method is better than that of MPC because the weight can be changed according to fuzzy rules. In addition, the instability of nonlinear system is avoided by adding stability judgment. In practical engineering application, dynamic positioning requires long-time movement on the water surface, and the water surface environment is complicated. Under different conditions, the requirements of dynamic positioning technology are different. For example, in general, to ensure safety, it is important to ensure the subsequent performance of the offshore platform first, whereas the offshore platform should focus more on availability and fuel consumption when dynamic positioning stabilizes the control process. However, due to the fixed weight factor of each index, the traditional MPC algorithm cannot adapt to the complex environment. It can be seen from the experimental results that the dynamic positioning control method designed in this article can better complete the adaptive tracking of the reference trajectory of the offshore platform, so that the platform can track the reference trajectory more smoothly under the constraint conditions. The algorithm not only ensures the stability of dynamic positioning but also improves the energy efficiency of the power system to a certain extent and reduces the waste of fuel. Although our proposed method has its unique advantages, it also has some disadvantages:
There will be time delay and error when the sensor measures the state information and environment perception of the semi-submersible platform, which may bring time delay to the system. This is also the content to be studied in later work.
Transient changes caused by high-frequency signals have little effect on horizontal motion, so we only consider horizontal motion under low-frequency conditions. In the future, we plan to introduce high-frequency signals into the model to further improve accuracy.
In practical applications, there may be sudden extreme conditions, such as earthquakes and tsunamis. In such sudden situations, the control accuracy may be reduced.
Conclusion
In this article, an SFMPC technique is proposed and applied in the semi-submersible platform’s dynamic positioning tracking. The weight matrices Q and R to be optimized in the MPC objective function are changed by T-S fuzzy: The error and error increment of the system state are taken as the input of the fuzzy algorithm; the weight ratio of the input value in the objective function is adjusted in real time according to the fuzzy rules; and a new weight matrix is generated. Let CLF be unified with QP for ensuring the stability and optimality of the system and avoiding the use of terminal constraints. This optimization method adjusts the weight proportion of the input value in the objective function in real time according to the actual navigation and makes up for the defects of the traditional trial and error method, as well as the empirical method. The controller optimized by this method is simulated and compared with the traditional MPC. The results show that the proposed method improves the control efficiency of dynamic positioning tracking and further ensuring the stable operation of the dynamic positioning control process of offshore platforms under limited working conditions.
Footnotes
Acknowledgements
The author(s) would like to thank the Editor-in-Chief, the associate editor, and anonymous referees for their invaluable comments and suggestions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded by the National Key R&D Program of China (grant no. 2019YFC0312303-05).