
Abstract
The recursive filtering problem for a class of time-varying systems with mixed time-delays subject to stochastic communication protocol and dynamic quantization effects is discussed in this article. It is assumed that only one sensor can transmit the measured information to the filter at each sampling period, and the selected sensor is determined by the scheduling strategy of the stochastic communication protocol. Based on this assumption, the dynamic upper bound of the filtering error covariance is derived for time-varying systems with mixed time-delays and an underlying scheduling protocol by solving two Riccati difference equations in each sampling period. Then, the trace of the upper bound is minimized to obtain the filter gain with the desired filtering performance. Subsequently, the boundedness issue of the filtering error covariance is investigated. Sufficient conditions are given to ensure that the filtering error covariance is exponentially bounded in the mean square. Finally, numerical examples are given to demonstrate the effectiveness and superiority of the proposed algorithm.
Keywords
Introduction
Filtering problems have received much attention in the control and signal processing communities for several decades.1–4 The main purpose of filtering is to estimate the internal state of the system according to the measurement output contaminated by noise signals. At present, filtering has been widely used in aircraft tracking, smart grids, and bioprocess monitoring. Based on these applications, several filtering methods are proposed according to different noise characteristics and performance indices, such as recursive filtering,5,6H∞ filtering,7,8 and set-membership filtering.9,10 Among them, the recursive filtering method has the advantages of easy implementation and high estimation accuracy,11,12 which has garnered increasing research interest. In general, three recursive schemes are commonly used to solve the state estimation problem, namely, classical Kalman filtering, extended Kalman filtering, and unscented Kalman filtering. Recursive filtering is essentially a state estimation method based on optimizations. Specifically, the main idea of recursive filtering algorithms is to obtain the upper bound of the filtering error covariance and provide a filter to minimize the upper bound at each sampling period.13,14
In networked systems, the design of recursive filtering is challenged due to network-induced communication limitations, such as time-delays, quantization effects, and medium access constraints. Applying the traditional recursive filtering algorithm directly to the networked systems will inevitably deteriorate the filtering performance and even lead to the divergence of filtering errors. Therefore, it is very significant to investigate the recursive filtering design problem under various communication limitations. In the practical control processes, the system information must be quantized before being transferred through the network. Due to the influence of network bandwidth and calculation accuracies, quantization errors will inevitably occur and be one of the main network-induced constraints that degrade the performance of networked systems. In recent years, several methods have been proposed to address the signal quantization of networked systems. Such methods include but are not limited to uniform quantizer, 15 logarithmic quantizer, 16 and dynamic quantizer. 17 Essentially, both uniform quantizer and logarithmic quantizer can be classified as static quantization technologies. Compared with them, the dynamic quantification mechanism has proven to be the most effective in mitigating performance degradation, and some control problems concerning dynamic quantization have been deeply investigated; more information and references are provided in the literature.18,19 However, according to the results obtained by consulting the literature, the recursive filtering design problem of networked systems affected by the dynamic quantization has not attracted enough attention, which motivates us to fill this gap.
It is worth noting that in many underlying investigations on the filtering problem of networked systems, an implicit assumption is that there are adequate communication channels between the sensors and the filter, and all the sensors can simultaneously access the communication network to transmit the measured information to the filter during each sampling period. In many practical systems, however, it is quite unrealistic to implement such a communication scheme because simultaneous multiple access over a limited-bandwidth network would result in unavoidable data collisions. One important aspect to take into account in such a situation is implementing communication scheduling. To date, three communication protocols have been employed to arrange the network access sequence of sensors to effectively prevent data conflict, namely, the weighted try-once-discard (WTOD) protocol,20,21 the round-robin (RR) protocol,22,23 and the stochastic communication (SC) protocol.24,25 Among the above communication protocols, the WTOD and RR communication protocols belong to the category of deterministic scheduling schemes, while the SC protocol is a communication scheduling scheme in a stochastic manner. Under the scheduling of the SC protocol, the network nodes can access the network channels randomly for data transmission. The SC protocol can be widely used in many industrial control networks, such as the carrier sense multiple access (CSMA) protocol for Ethernet and the ALOHA protocol for wireless local area networks.
Compared with the filtering methods without protocol scheduling, the introduction of communication protocols, especially SC protocols, would certainly increase the difficulties of filtering design and performance analysis. In such a situation, it is necessary to adopt effective measures to reduce the adverse effect of SC protocol on recursive filtering performance. To date, some preliminary results concerning the recursive filtering problem for networked systems with SC protocols have been presented in Wang and colleagues.26–28 The recursive filtering problem is discussed in Alsaadia et al. 26 for complex networks under SC protocol. The upper bound of the estimation error covariance is derived by solving two sets of matrix difference equations, and then the performance analysis of the developed state estimator is provided in terms of the boundedness. In Zou et al., 28 the recursive filtering algorithm is proposed for networked time-varying systems with a scheduling protocol governed by the Bernoulli process, and the boundedness issue of the corresponding filtering error covariance is investigated.
On the contrary, the time-delay phenomenon commonly exists in various practical control systems, which is one of the main causes of system performance degradation or even instability. In recent years, the recursive filtering design problem of time-delayed systems has attracted much attention from researchers; more information and references are provided in the literature.29–32 Although the above studies have performed a great deal of useful exploration, there are still many problems that have not been fully investigated for the recursive filtering issue of time-delayed systems. In most existing literature, a fundamental assumption is that time-delays always occur simply in a fixed manner. However, with the rapid development of information technology, the complexity of the system structure and time-delay mechanism is gradually increasing. In this context, various time-delay models have been proposed to better characterize different system properties. Among various categories of time-delays, mixed time-delays have recently drawn growing research interest due to their practical insights into characterizing the spatial nature of signal transmission delays in some complex systems. It is worth noting that a popular general rule is that the systems with mixed time-delays have more difficulty obtaining the desired filtering performance than the dynamical systems with fixed delays under the same conditions, which has generated preliminary results; more information and references are provided in Wang and colleagues.33–35 Unfortunately, for the filtering design problem of systems with mixed time-delays, the available results mostly employ H∞ filtering and set-membership filtering methods. To the best of the author’s knowledge, considering both dynamic quantization mechanism and SC protocol to schedule network resources has not been reported for the recursive filtering design of time-delayed networked systems, in addition to the analysis of the influence of time-delay intervals and weight coefficients on the filtering performance. Therefore, the main motivation of this article is to investigate the recursive filtering problem for networked systems with mixed time-delays subject to the SC scheduling protocol and dynamic quantization effects.
In response to the aforementioned discussion, the recursive filtering problem for a class of time-varying systems with mixed time-delays subject to SC protocol and dynamic quantization effects is investigated in this article. The main contributions of this article can be summarized as follows: (1) a description model of networked systems with mixed time-delays limited by the SC protocol and dynamic quantization effects is obtained, and a recursive structure filter is proposed based on this model; (2) for the established augmented system with mixed time-delays, the dynamic upper bound of filtering error covariance is obtained by solving two Riccati equations, and the filter gain is derived by minimizing the upper bound; and (3) based on the results of (2), the issue of boundedness for the filtering error dynamics is further discussed, and the influence of the delay interval and weight coefficients on the filtering performance is investigated.
The rest of this article is organized as follows. In section “Problem formulation and preliminaries,” the problem description and preliminaries are presented. In section “Main results,” a recursive filtering algorithm is proposed for time-delayed networked systems with the impacts of the SC protocol and network-induced constraints. Illustrative examples are provided in section “Main results” to demonstrate the effectiveness and superiority of the proposed results. Finally, this article is concluded, and future research directions are discussed in section “Conclusion.”
Notation
The notation used throughout this article is fairly standard.
Problem formulation and preliminaries
Model description
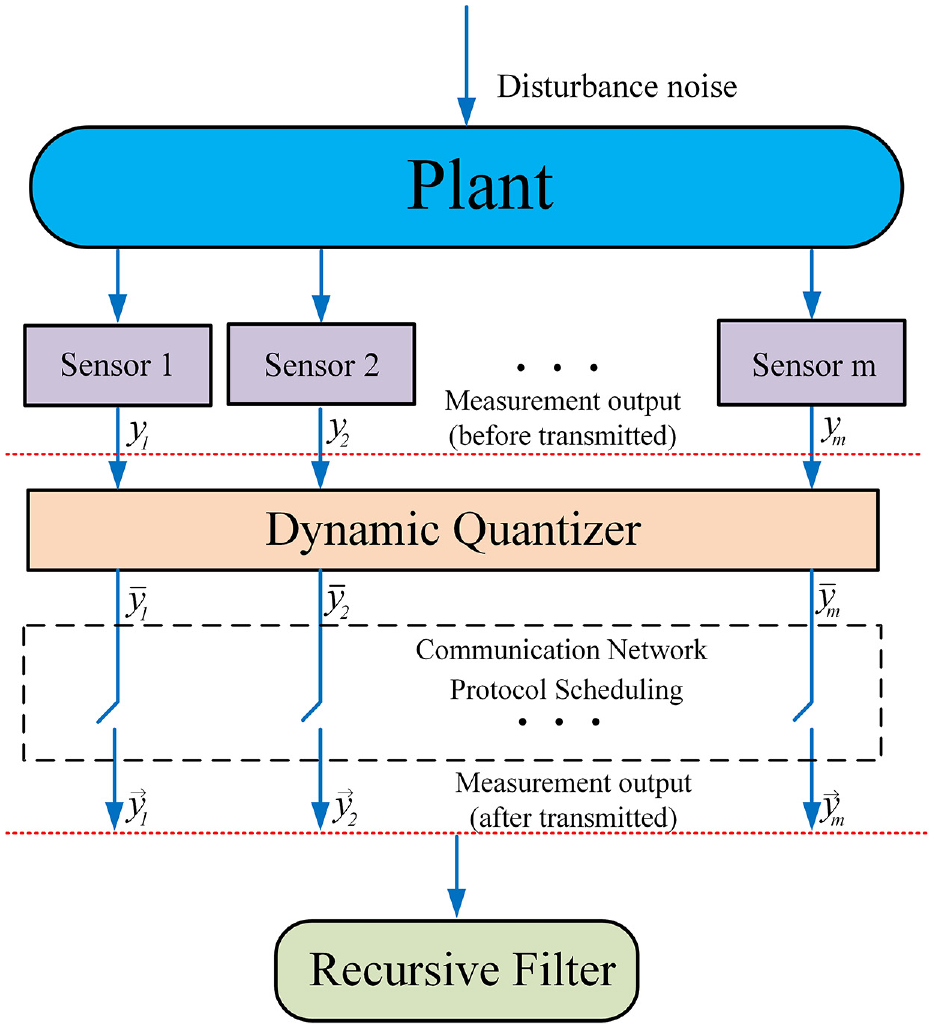
In this section, we present the model of a networked system subject to the SC protocol and dynamic quantization effects, whose structure is depicted in Figure 1. We consider the discrete networked system with mixed time-delays described by
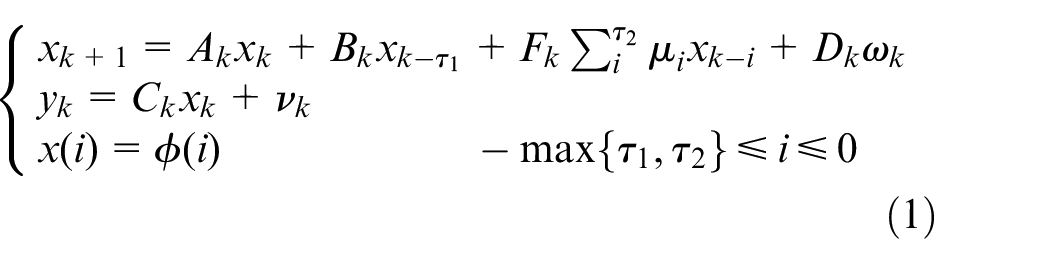
where
State estimation problem for NCSs.
Dynamic quantizer
Now, we can consider the effects of the signal quantization. In this article, we adopt the following dynamic quantizer 17

where

The SC protocol
For networked systems with a large number of sensors, the communication between the sensors and the filter is scheduled by a certain network protocol to avoid data collisions. Moreover, we will introduce the scheduling protocol of SC. Without loss of generality, we assume that only one sensor is allowed to access the network channel according to the underlying scheduling protocol and let
Under the scheduling of the SC protocol, it is assumed that

where
Problem formulation
Next, we aim to address the recursive filtering design problem for networked systems with mixed time-delays, signal quantization, and SC protocol. Furthermore, we will consider the measurement signal received by the filter. As shown in Figure 1, the measurement output before quantizing can be characterized as

where

denote the output of the dynamic quantizer and the measurement output after transmission through the network, respectively. Then, the eventual measured output

According to the updating rule of the measurement output equation (4), the following equation is obtained

with the initial state

where
The model of time-delayed networked systems with dynamic quantization and SC scheduling protocol can be attained by substituting equations (2) and (5) into equation (1) and introducing an augmented state variable

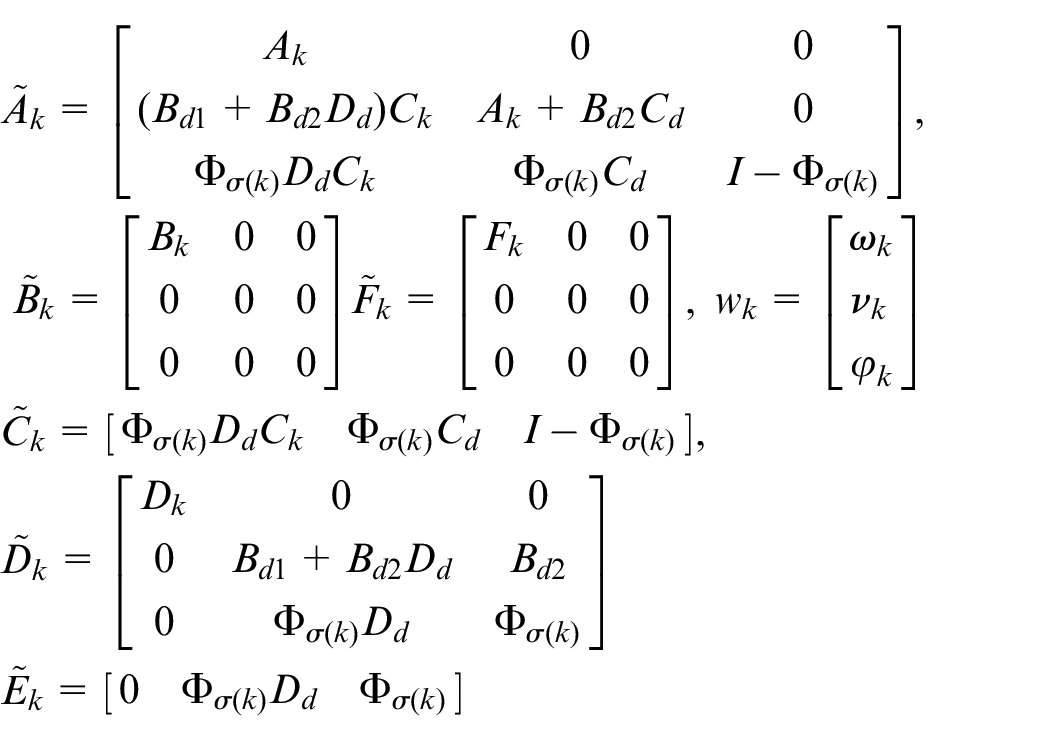
which results the augmented system model as follows
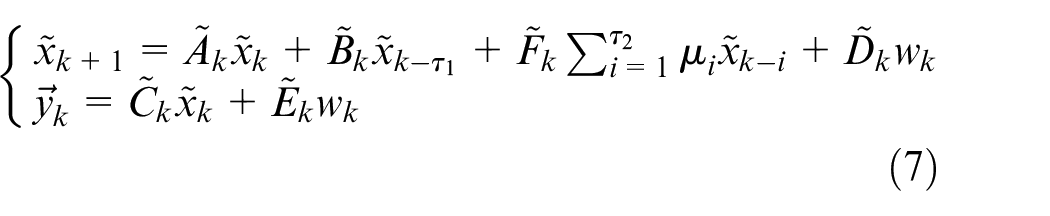
where
It is obvious that the quantization error

which yields

For networked systems with mixed time-delays, the following recursive filter is employed
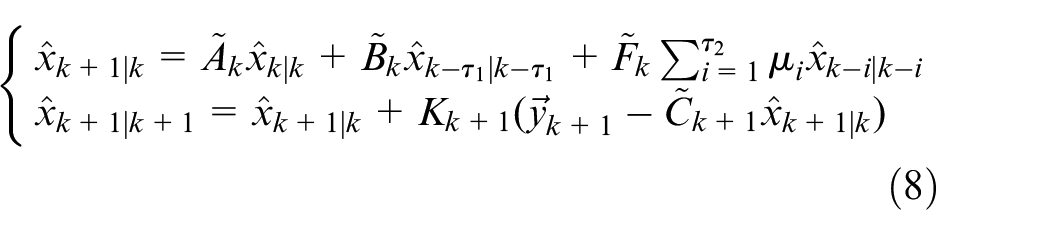
where
We define the one-step prediction error


Main results
In this section, we aim to develop a unified framework to deal with the recursive filtering design problem for networked systems with mixed time-delays. Before proceeding further, we introduce the following lemmas, which will be helpful in subsequent developments.
Lemma 1. We assume there is a stochastic process

and

Then, the stochastic process is exponentially bounded in the mean square.
Lemma 2. For

then the solutions

satisfy
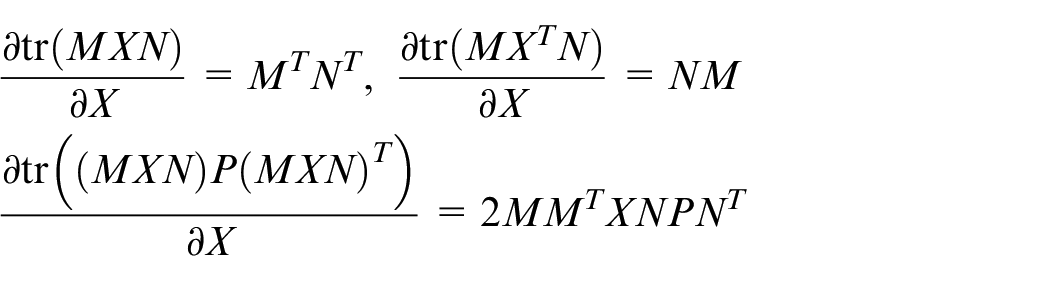
Lemma 3. Given the appropriate dimension matrices M, N, X, and P, the following equations hold 32
Now, we are in the position of deriving the dynamic upper bound of prediction error covariance and filtering error covariance.
Upper bound of filtering error covariance
Theorem 1. For the networked system with mixed time-delays equation (7), we provide the positive scalars
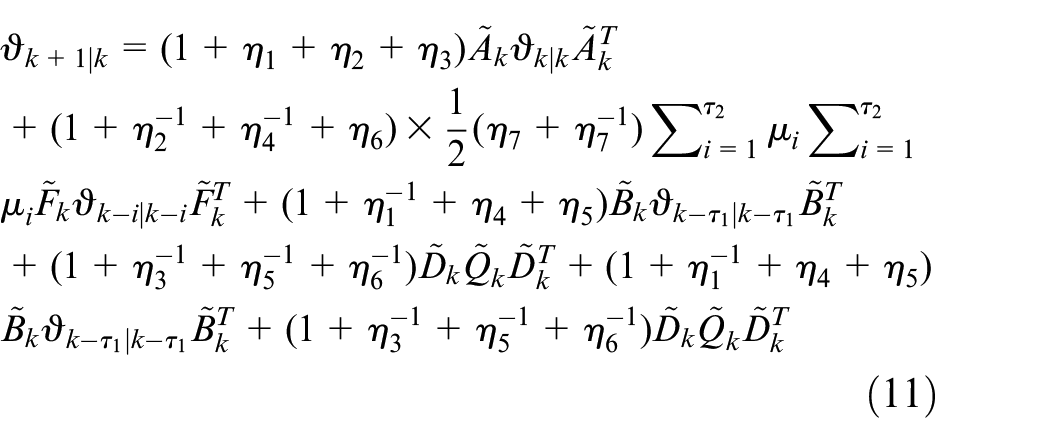
and
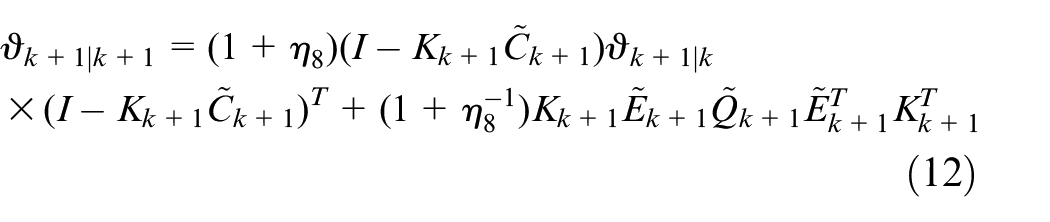
if the initial state satisfies
Proof. The proof is provided in Appendix 1.
In Theorem 1, we have obtained dynamic upper bounds of the prediction error and filtering error covariance. Subsequently, we derive the filtering gain matrix by minimizing the proposed upper bounds.
Theorem 2. For the networked system with mixed time-delays equation (7), we provide the positive scalars

where

Proof. The proof is provided in Appendix 2.
Boundedness analysis of filtering error dynamics
In engineering practice, the norm of the system matrix, measurement noises, and process noises are usually bounded due to energy constraints, which indicates that the following assumption is reasonable.
Assumption 1. The following matrix relationships hold for every
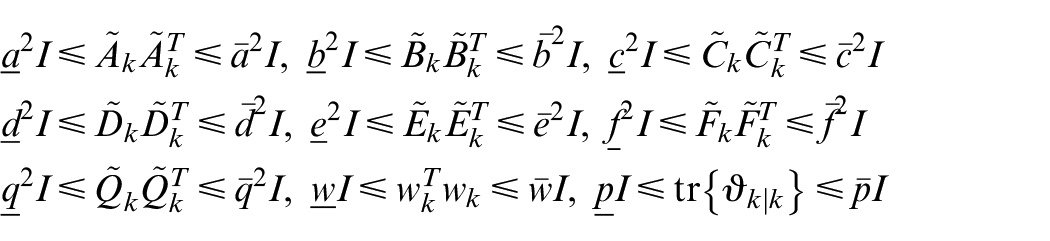
where
According to the above assumptions, we further investigate the boundedness of the filtering error dynamics obtained by Theorems 1 and 2.
Theorem 3. For the networked system with mixed time-delays equation (7), we provide the positive scalars
Proof. The proof is provided in Appendix 3.
Remark 2. In Theorem 3, we have discussed the exponentially mean-square boundedness of the filtering error covariance, which shows that the boundedness is closely related to the matrix norm of networked systems and the upper bound of the filtering error covariance. According to Theorem 3, if the system matrix norm and filtering error covariance have upper bounds, the filtering error dynamics will eventually guarantee the exponentially bounded in the mean square.
In terms of Theorems 1 and 2, we summarize the structure diagram of the recursive filtering algorithm as follows.
Remark 3. The aim of the proposed recursive filtering algorithm is to obtain the upper bounds of the one-step error covariance and filtering error covariance by solving two Riccati difference equations in each sampling period and then minimize the trace of
Remark 4. The recursive filtering problem for a class of time-varying systems with mixed time-delays subject to SC protocol and dynamic quantization effects is discussed in this article. In virtue of equation (7), it is easy to understand in what manner the SC protocol and the dynamic quantizer influence the dynamic behavior of the system. For example,
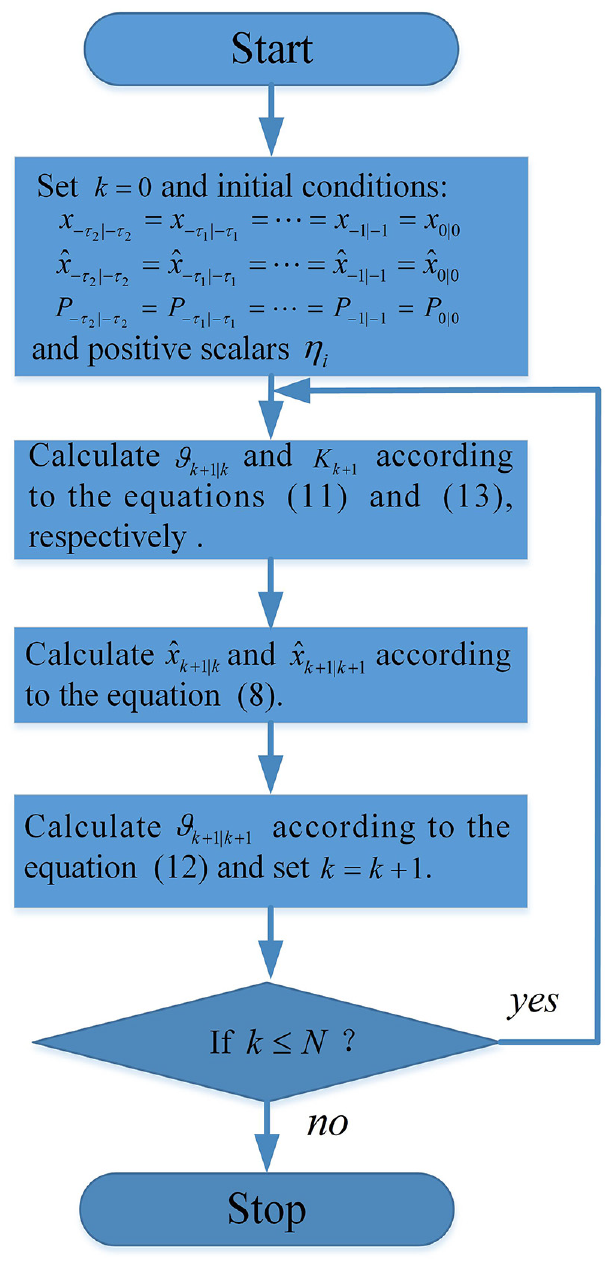
Structure diagram of the recursive filtering algorithm.
Numerical simulation
In this section, two simulation examples are provided to illustrate the effectiveness and superiority of the presented recursive filtering algorithm for networked systems with mixed time-delays. In Example 1, the effectiveness of the proposed filtering algorithm is demonstrated, and the influence of the time-delay interval and weight coefficients
Example 1. We consider a class of networked systems with mixed time-delays in the form of equation (1), and the following parameter matrices are given
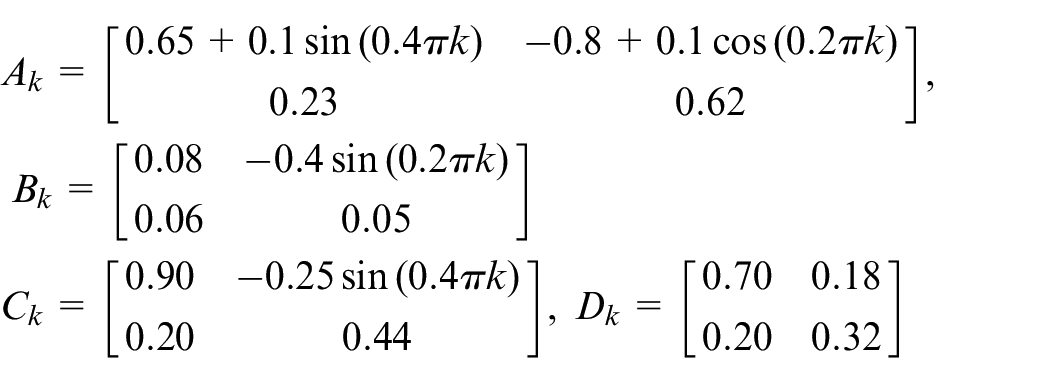
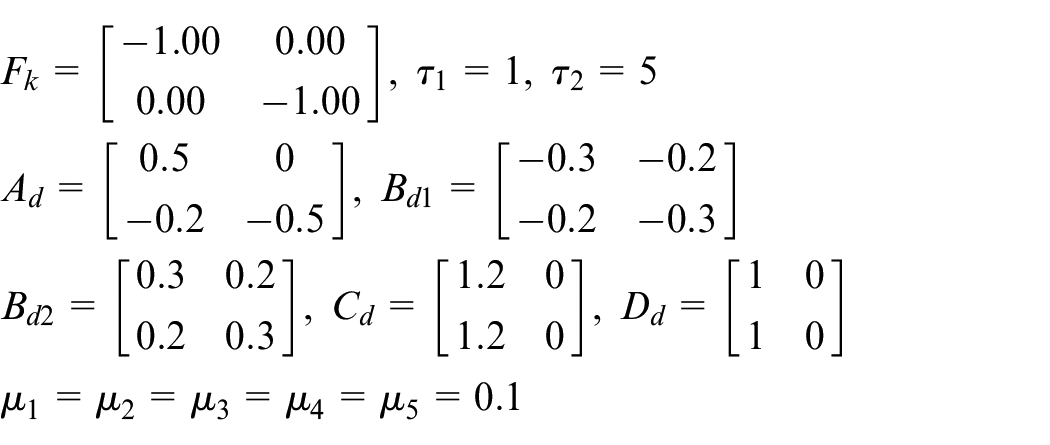
In the simulation, we take the initial state of the system as

The transition probability of the SC protocol is set to

Then, according to Theorem 2, the time-varying filtering gain
Values of
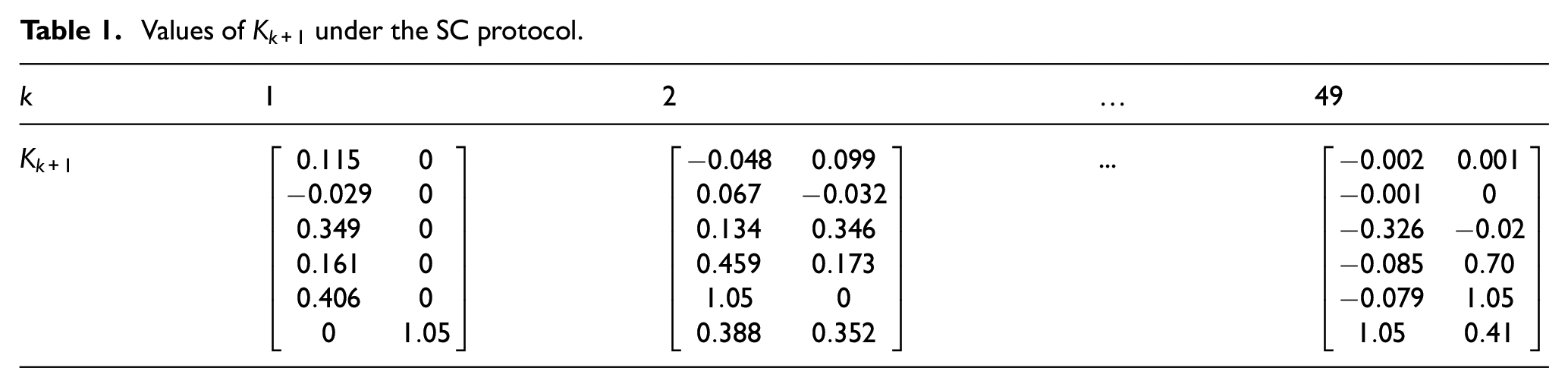
The simulation results are shown in Figures 3–9. Figure 3 depicts the communication sequence subject to the SC scheduling protocol, where “1” represents that sensor 1 obtains the access authority to the communication network; similarly, “2” represents that sensor 2 obtains the access authority to the communication network. In such a communication protocol, which sensor obtains the network channel is determined by a Markov chain with the given transition probability. State trajectories of
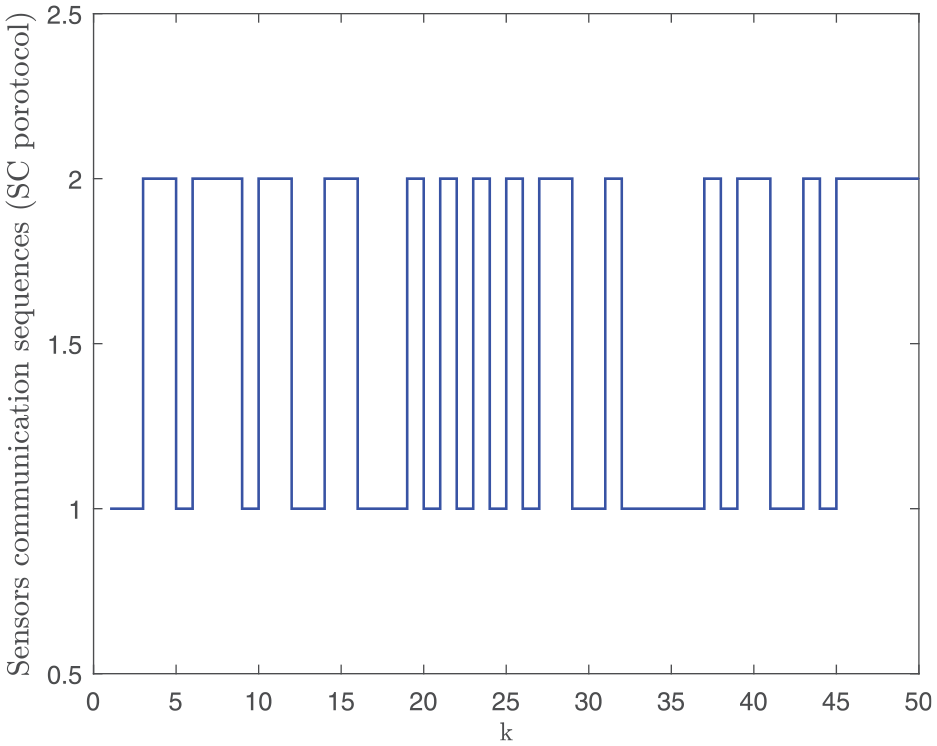
Sensors communication sequence under the SC protocol.
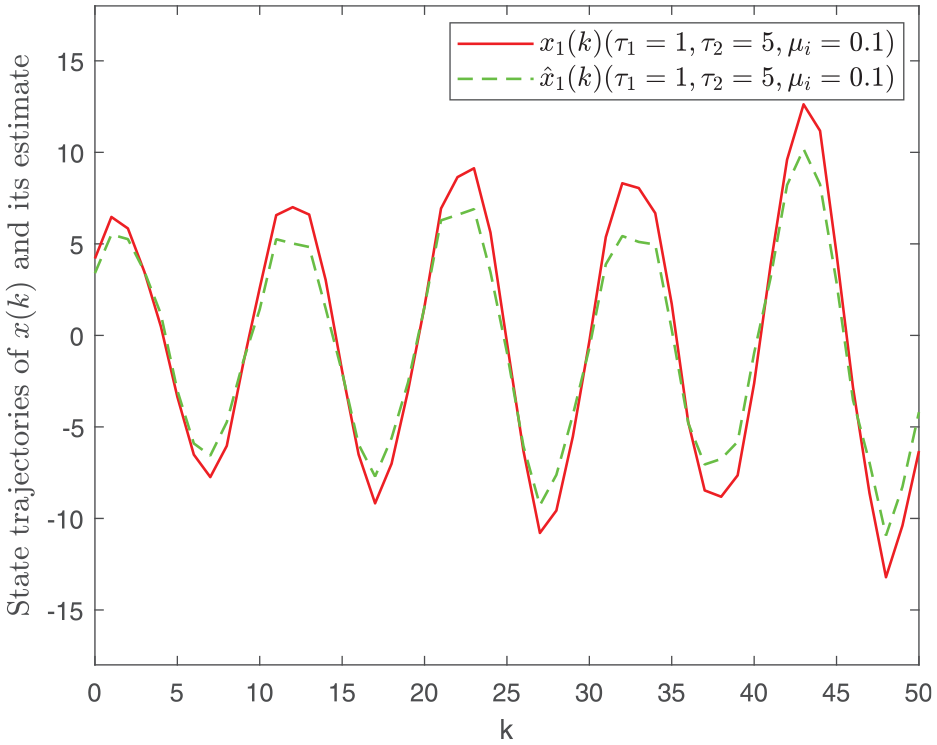
State trajectories of
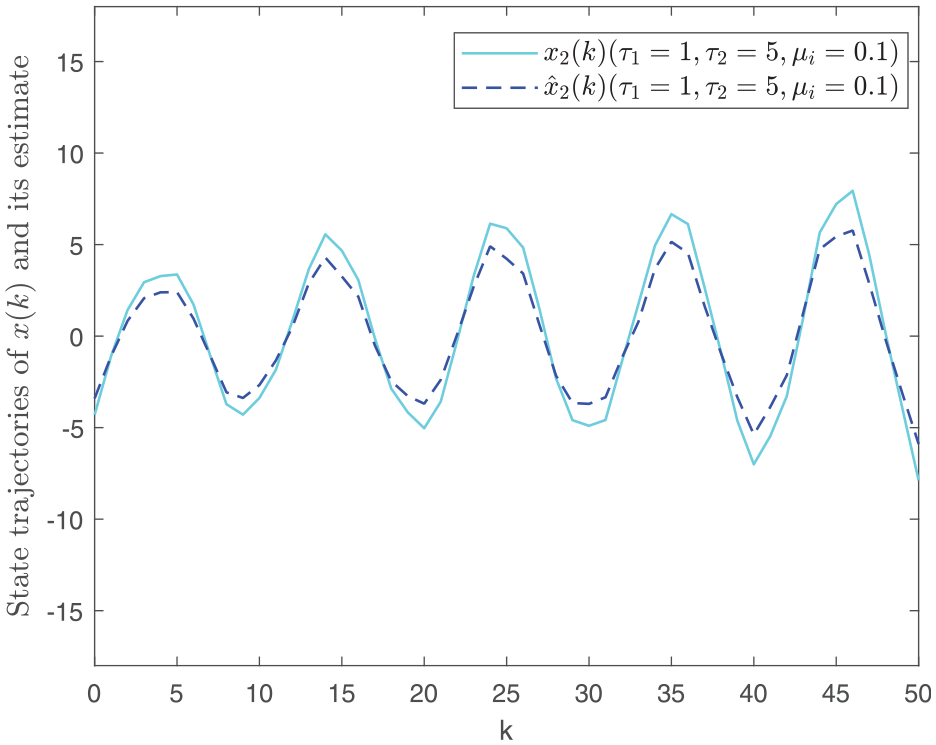
State trajectories of
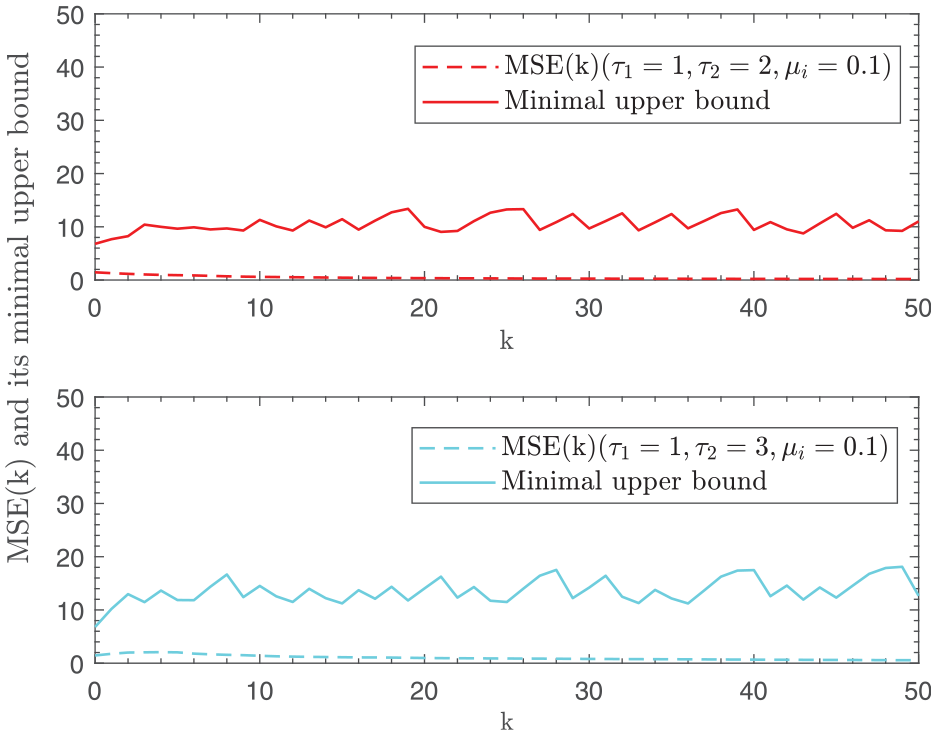
MSE(k) and the trace of the minimal upper bound with delay intervals
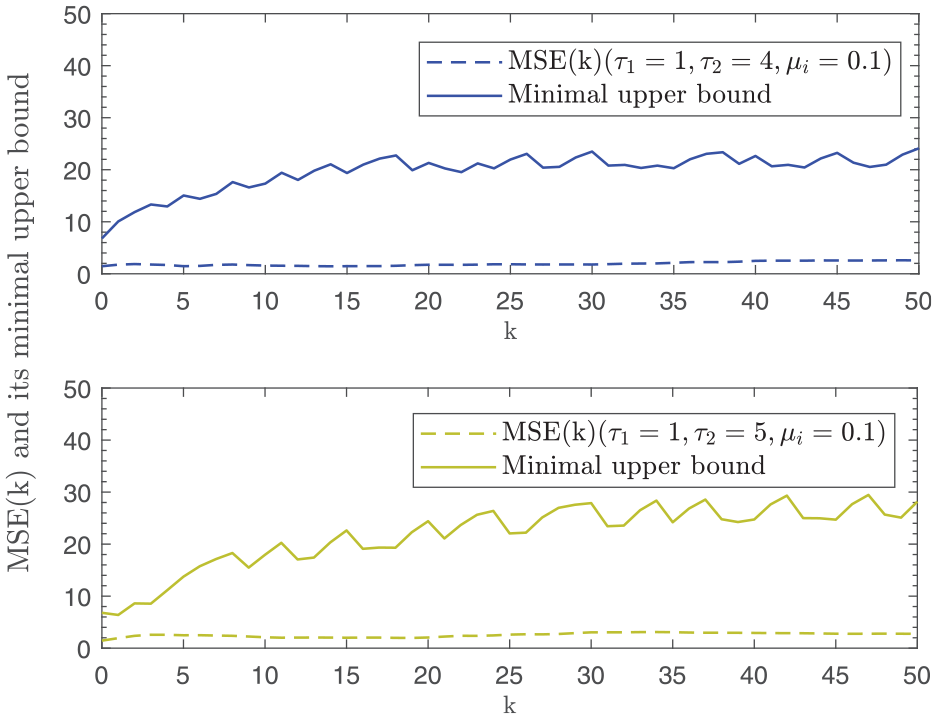
MSE(k) and the trace of the minimal upper bound with delay intervals
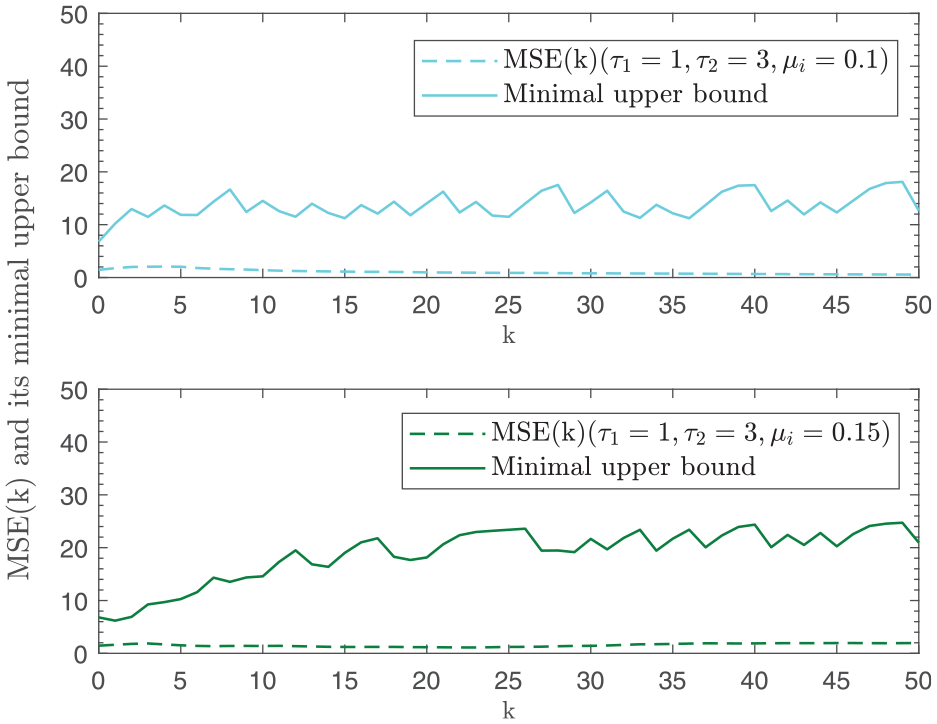
MSE(k) and the trace of the minimal upper bound with the weight coefficients
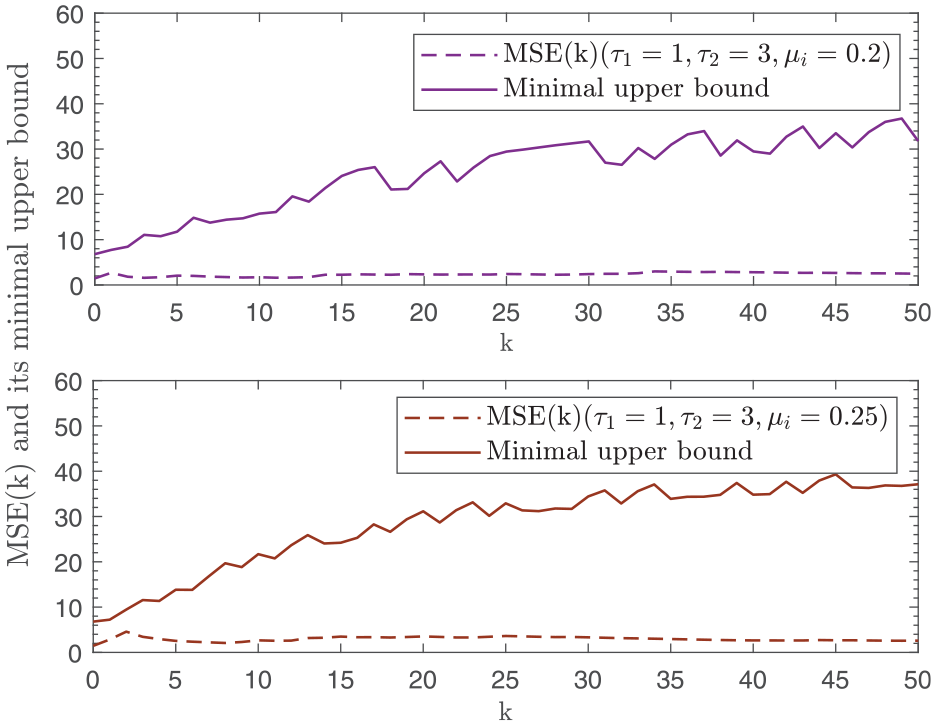
MSE(k) and the trace of minimal upper bound with weight coefficients
To analyze the influence of the delay interval and parameter

where i represents the dimension of the state vector, and k represents the number of samples. Then, we let the weight coefficients be
MSE(k) at different delay intervals

Trace of minimal upper bound at different delay intervals

MSE(k) with different weight coefficients

Trace of minimal upper bound with different weight coefficients

Example 2. We consider the networked DC servo system proposed in Zou et al., 34 and the controlled plant and remote filter are connected by a shared communication network. Referring to Zou et al., 34 the system parameters of the DC servo system are given as follows
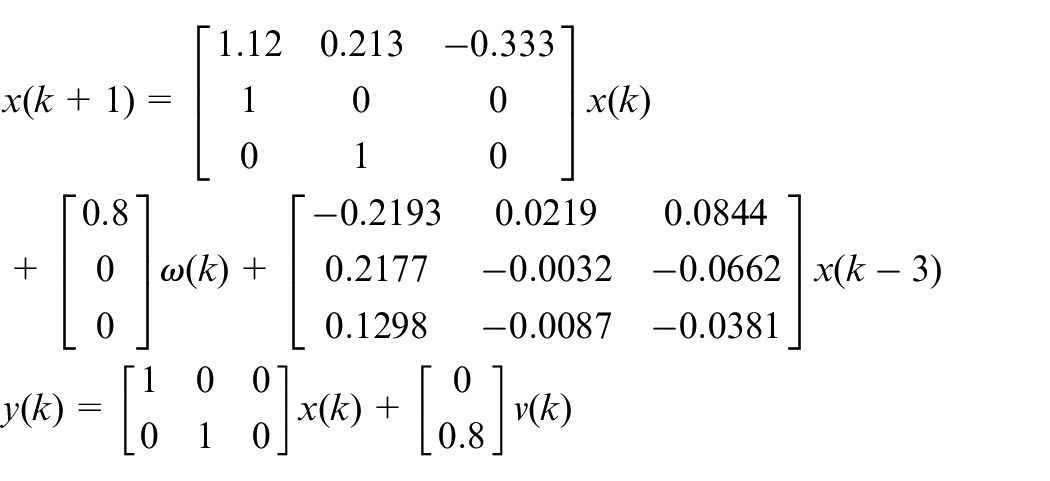
In the simulation, we take the initial state of the system as

For a comparison with the existing results, we utilize the H∞ robust filtering algorithm of Zou et al.
37
under the same initial conditions. The simulation results are shown in Figures 10–14. Figure 10 depicts the communication sequence subject to the SC scheduling protocol. For the proposed recursive filtering algorithm and H∞ robust filtering algorithm of Zou et al.,
37
state trajectories of
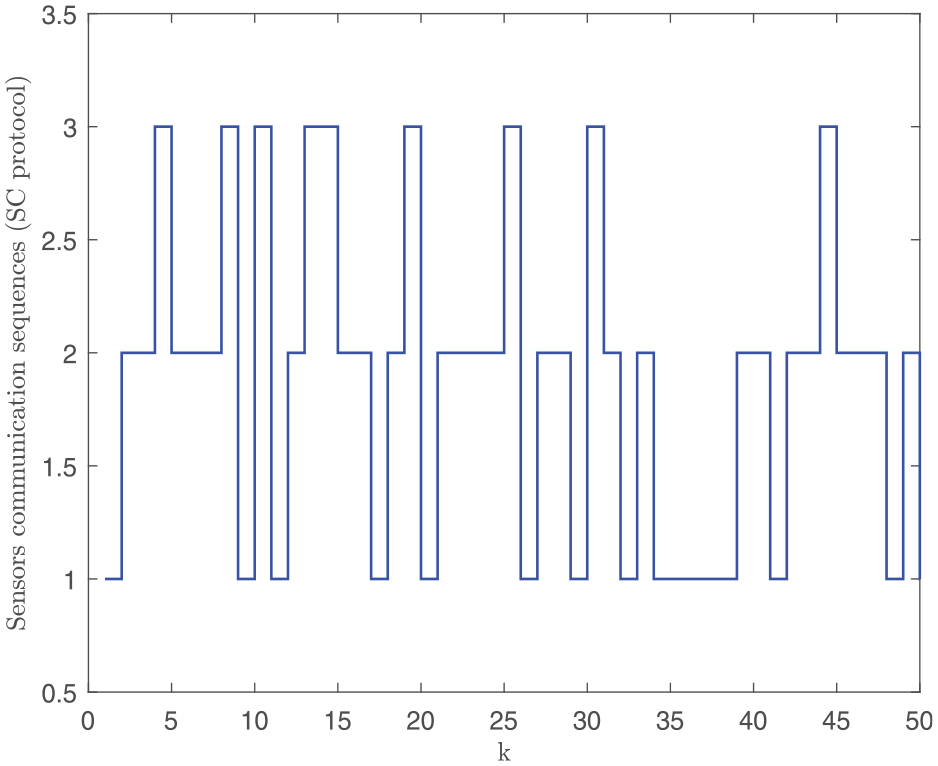
Sensors communication sequence under the SC protocol.
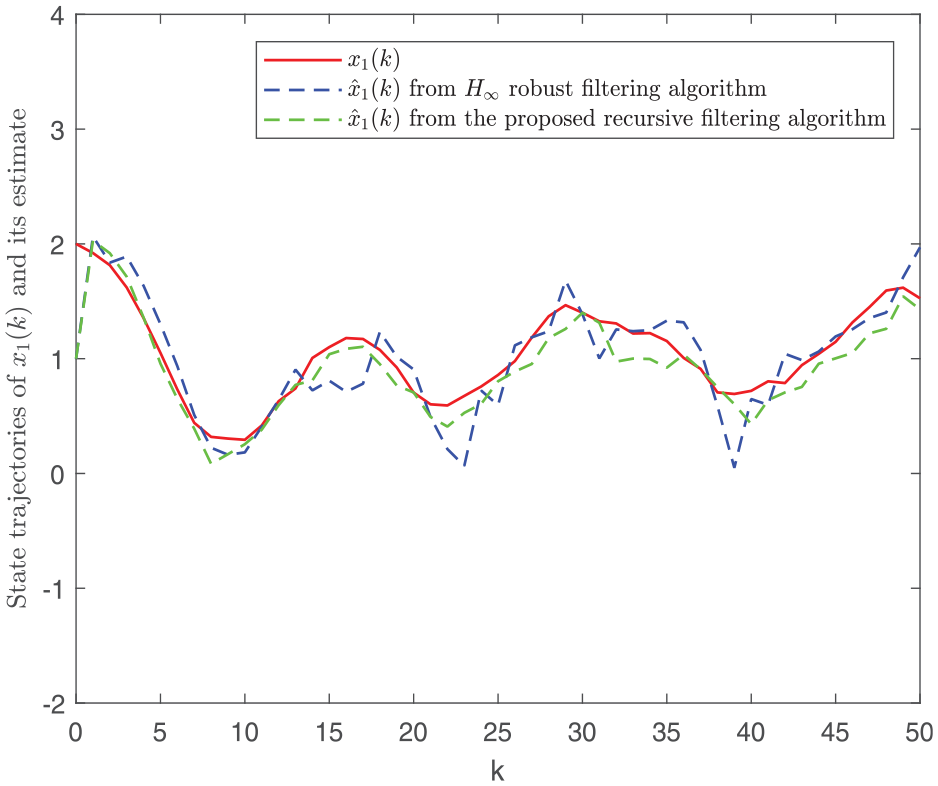
State trajectories of
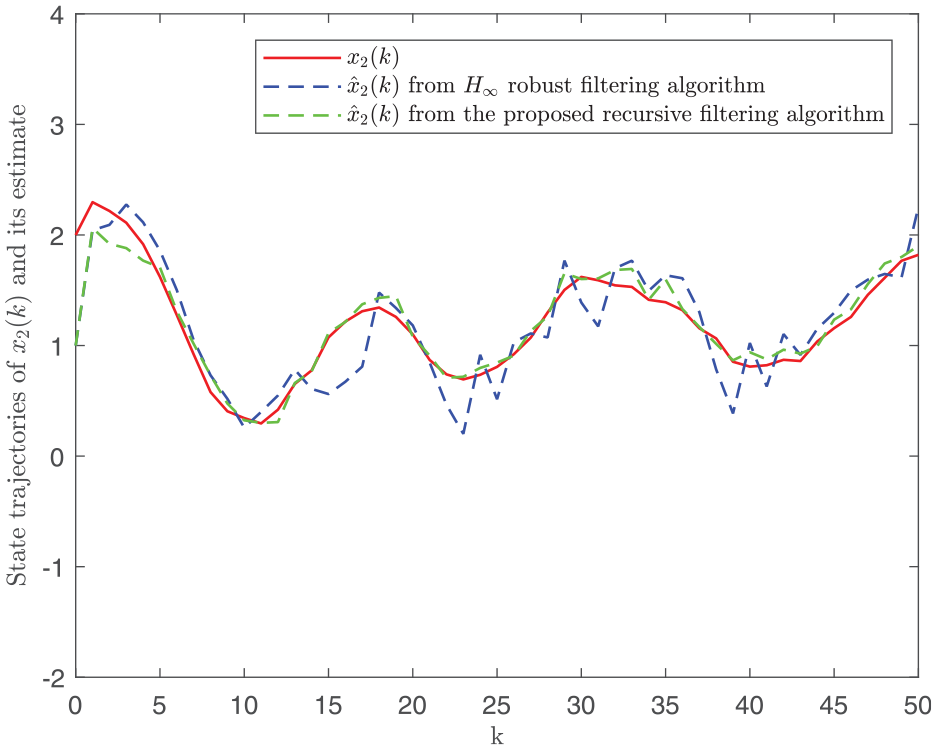
State trajectories of
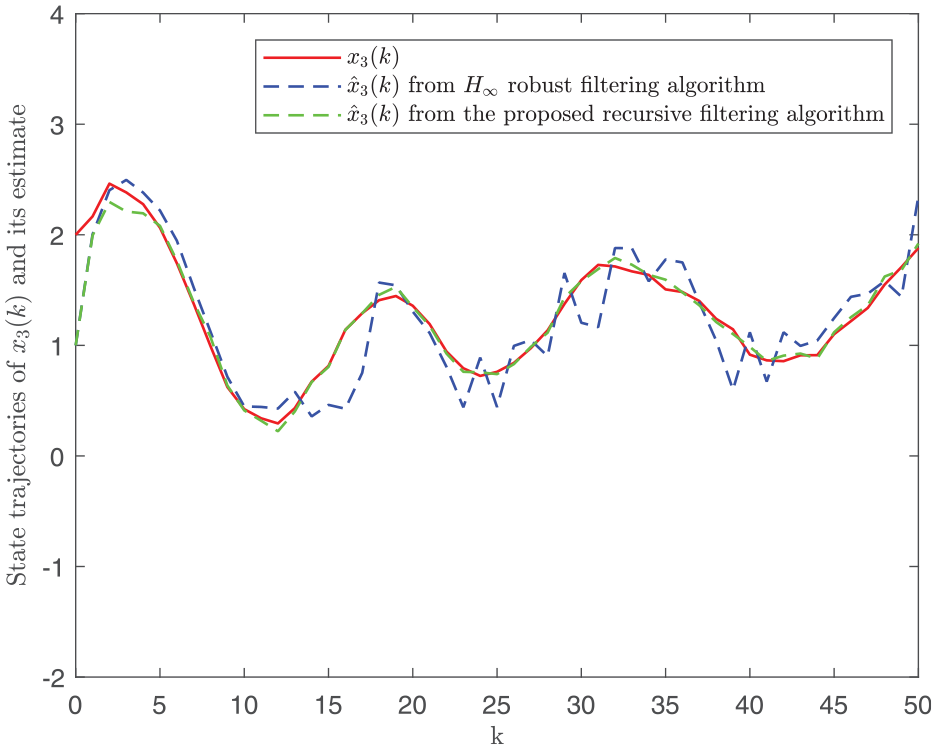
State trajectories of
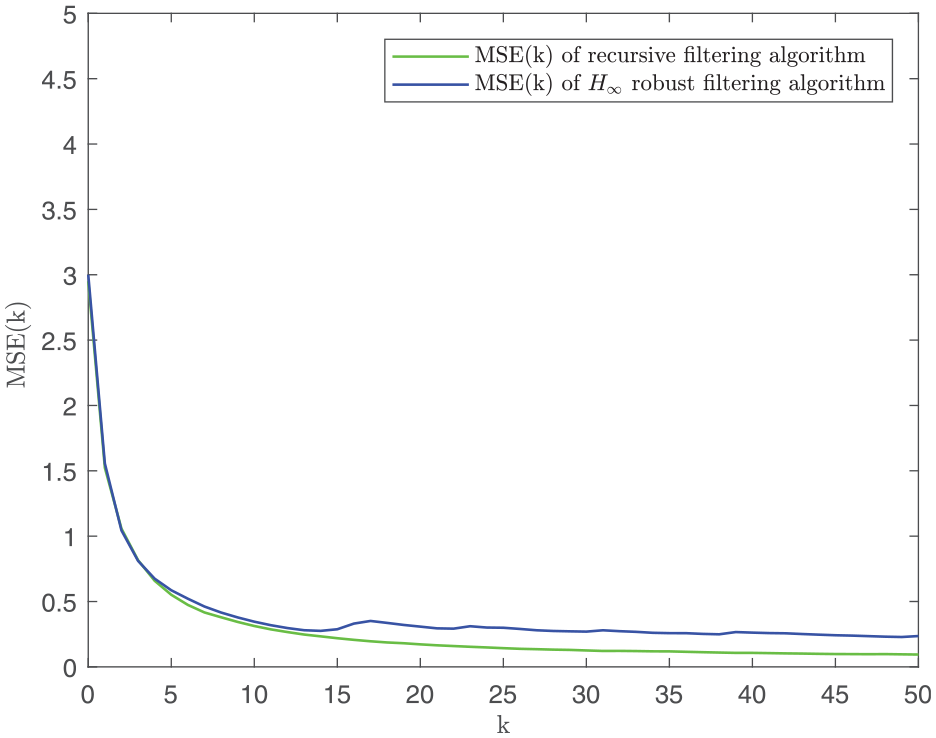
MSE(k) under the proposed recursive filtering algorithm and H∞ robust filtering algorithm.
Conclusion
The recursive filtering design problem for networked systems with mixed time-delays subject to the SC protocol and dynamic quantization effects is investigated in this article. Due to the presence of a limited-bandwidth network, it is assumed that only one sensor can transmit the measurement information to the filter at each sampling period, and the selected sensor is determined by the scheduling strategy of the corresponding communication protocol. Another fundamental issue is to mitigate the influence of the quantization errors on the filtering performance by employing the dynamic quantization mechanism. In such a framework, the recursive filter has been proposed to obtain the estimate of the system state under the influence of the SC protocol and dynamic quantization error. The upper bound of the filtering error covariance is addressed by solving two Riccati difference equations, and sufficient conditions have been derived for the presented recursive filter to guarantee the exponentially mean-square boundedness of the filtering error dynamics. Simulation examples have demonstrated the effectiveness and superiority of the developed recursive filtering algorithm by comparing the filtering effect with the H∞ robust filtering algorithm. Moreover, a future research topic is to explore the Bayesian scheme to improve the filtering performance.
Footnotes
Appendix 1
Appendix 2
Appendix 3
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under grants 62263019 and 61863026, and in part by the Science and Technology Program of Gansu Province under grant 21ZD4GA028.
Data availability statement
All data included in this study are available upon request by contact with the corresponding author.