This article investigates the mean-square bounded consensus problem for nonlinear multi-agent systems under hybrid attacks composed of deception attacks and denial-of-service attacks. The network consists of a leader and several followers. The attacks can disrupt network connections and inject false data. Using an impulsive control approach, the mean-square bounded consensus is analyzed. Meanwhile, the upper bound of error is also calculated. Based on the knowledge of the Lyapunov stability theory, graph theory, and linear matrix inequalities, sufficient conditions for the mean-square bounded consensus of multi-agent systems are obtained. Finally, the feasibility and validity of the theoretical results are verified by the provided numerical simulations.
Over the past few decades, a large amount of literature has been devoted to the study of cooperative behaviors that appear on various complex networked systems, such as consensus and synchronization. The consensus for multi-agent systems (MASs) has received more and more attention due to its essential applications, including the control of robots, the formation of unmanned aerial vehicles, and so on.1–4
At present, research on consensus for MASs has yielded remarkable results. The leaderless consensus for the second-order heterogeneous linear MASs was studied.5 For the strict-feedback nonlinear MASs with unknown control directions, the adaptive leaderless consensus was achieved.6 Compared with the leaderless consensus, the consensus objective can be set in advance in the leader–following consensus, which has gained lots of attention. For example, by utilizing the event-triggered control method, some sufficient conditions about the leader–following consensus of MASs were obtained.7,8 The leader–following consensus for the linear and nonlinear MASs with quantized communication was investigated.9 Based on the above discussion, the leader–following consensus is further researched in this article.
With the increase in network complexity and the expansion of scale, the cyber attack has gradually become a security factor that cannot be ignored. There are several kinds of cyber attacks, such as denial-of-service (DoS) attacks and deception attacks. Some related results about the consensus are described as follows. Considering input saturation and fault detection, the secure consensus for MASs under DoS attacks was studied.10–12 Compared with the DoS attacks, it is difficult to detect deception attacks. The quasi-consensus for nonlinear MASs with time delay under deception attacks was investigated.13 Using the sampled-data control, the consensus for nonlinear MASs under deception attacks was achieved.14,15 However, in practical situations, there may exist multiple types of attacks. Therefore, it is essential to focus on the consensus for MASs under hybrid attacks. For instance, taking replay attacks and DoS attacks into account, the problem of leader–following consensus for MASs with the event-triggered control was presented.16 Accordingly, in this work, the MASs simultaneously suffered from deception attacks and DoS attacks are put forward, given that DoS attacks can cause the network disconnection, and deception attacks will inject false data into the control information.
In order to realize the consensus of MASs, various control methods have been adopted, including event-triggered control, sampled-data control, and impulsive control. For example, using asynchronous sampled-data control, the leader–following consensus of MASs was studied, and the upper bound of the sampling period was given.17 Considering the existence of time delay in the network, the event-triggered consensus for MASs was achieved.18 By utilizing the event-triggered impulsive control method, the consensus issue for heterogeneous MASs was presented.19 Especially, the impulsive control is economical and effective, which is also valid for the consensus of MASs under attacks. Utilizing the impulsive control method, the consensus for MASs with malicious attacks was investigated.20 By introducing DoS attacks into the network, the impulsive consensus was achieved.21,22 Furthermore, the secure consensus for MASs under deception attacks was proposed via the impulsive control.23,24 Therefore, impulsive control is utilized in this article for saving control resources. The contributions of this article are described as follows:
Given that the network is subject to a mix of attacks containing deception attacks and DoS attacks, the mean-square bounded consensus (MSBC) for nonlinear MASs is investigated. Specially, at the impulsive control instants, due to the existence of deception attacks, the data transmitted by the attacked agents will be replaced by incorrect information. Meanwhile, if the intervals of DoS attacks contain impulsive control instants, the agents may be unable to receive the information from neighboring agents. Owning to the introduction of the nonlinear dynamics and hybrid attacks, the systems considered in this article are more practical.
Impulsive control is first used for the consensus of MASs under hybrid attacks. The impulsive control is an efficient control method. Therefore, in this article, the agents are supposed to receive the control data from the neighboring agents at the impulsive instants. However, just because the impulsive control only transmits information at discrete time, it is more vulnerable to attacks than the continuous control. Accordingly, it is challenging to study impulsive consensus issue under hybrid attacks.
An upper bound for the consensus error of MASs under DoS attacks and deception attacks is proposed. Meanwhile, the upper bound of the frequency of DoS attacks is given. Furthermore, we discuss the consensus for MASs with only DoS attacks or deception attacks. It is found out that MSBC is realized due to the deception attacks. If MASs are only attacked by DoS attacks, the complete consensus can be achieved. Meanwhile, the results show that the false data injected by deception attacks is the main factor affecting the consensus error.
Notations
represents the -dimensional identity matrix. is an -dimensional zero column vector. The symbol is the Kronecker product of matrices. Superscript “” represents the matrix or vector transpose. The symbol stands for the mathematical expectation. and represent the largest and smallest eigenvalue of matrix , respectively. means the Euclidean norm of the vector. represents that the matrix is positive definite. represents the largest positive integer not greater than .
Preliminaries and model formulation
Graph theory
The network topology is denoted as , where is the set of nodes. is the set of edges. is the adjacency matrix, where is the weight of edge. is the network topology switching signal, and . Moreover, represents the network topology graph without DoS attacks, while represent the network topology graphs under DoS attacks. The Laplacian matrix is defined as , where , . The pinning matrix is denoted as , where is the pinning strength. Define .
Model formulation
Consider a nonlinear MAS consisting of follower agents and a leader agent, where the state of the th follower agent is described as
where represents the state matrix, . is the nonlinear function, and is the impulsive controller under attacks.
The state of the leader agent is given by
In the process of data transmission, effective DoS attacks will take place on the communication network, which interrupt information transmission and break the communication links, then the network topology will be switching. When the network topology is damaged, the repair systems are assumed to start work, which can reconnect communication links and recover the network topology.
Besides DoS attacks, deception attacks are also considered. Suppose that deception attacks occur at . For the th agent, if the attack is successful, correct data will be replaced by false data , and . A Bernoulli distribution variable is introduced to describe the probability of a successful attack, which follows , , where . Meanwhile, the variables are independent.
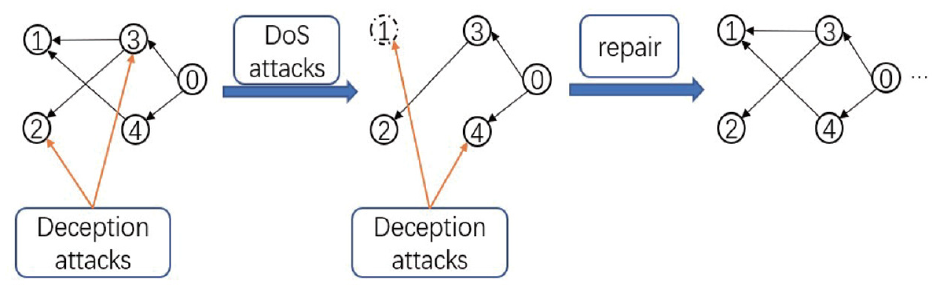
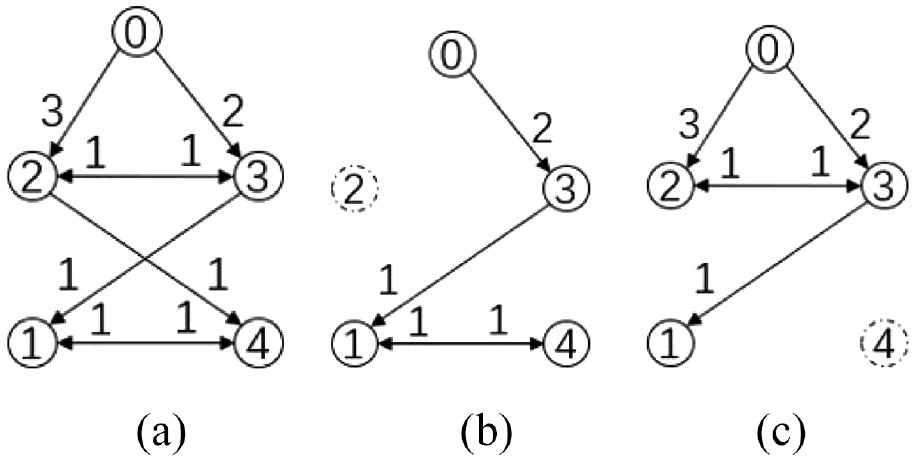
For more intuitive understanding, a brief diagram is given in Figure 1.
DoS attacks and deception attacks on the network.
Remark 1
Figure 1 shows DoS attacks and deception attacks on the network. Specifically, there are three graphs. In the first graph, followers 2 and 3 suffer from deception attacks, but there are no DoS attacks on the network. In the second graph, follower 1 suffers from both deception attacks and DoS attacks, then the communication links related the follower 1 are interrupted. Meanwhile, follower 4 suffers from deception attacks. The third graph represents that the topology of the network is repaired from the attacks. It is worth noting that DoS attacks and deception attacks can exist at the same time. In the work, the impulsive control is supposed to work at the instants , which means that each follower receives information from the neighboring agents at ; therefore, a DoS attack is effective only if its attack interval includes the instant . Otherwise, the DoS attack is invalid. Moreover, when the network is attacked by DoS attacks, the repair systems will be activated, and then the network topology will be recovered before the next impulsive time.
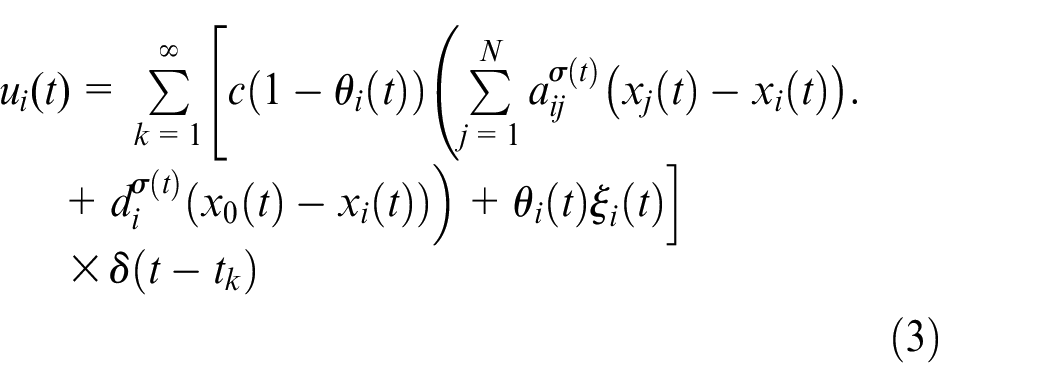
Combined with the above discussion, the impulsive controller can be represented as
where represents the Dirac impulse function, is the coupling strength, is the impulsive time, and .
Assumption 1
For the directed graph , there exists a spanning tree with the leader as the root node.
Assumption 2
The number of impulsive control between two effective DoS attacks is not less than , where . Furthermore, let , , where represents the number of impulsive controls during the time interval , and represent the number of times for MASs suffering from effective DoS attacks or not during the time interval , respectively. Suppose that .
Remark 2
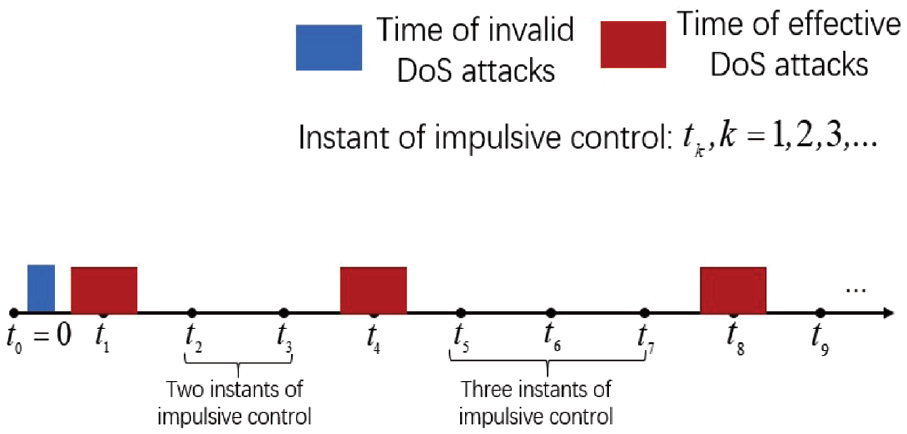
In Assumption 2, the number of impulsive controls between two adjacent effective DoS attacks is greater than , which can simplify the derivation process and guarantee that the consensus error caused by hybrid attacks has an upper bound (see Figure 2 for illustration). In Figure 2, we let . That is, the total number of impulsive control times between two adjacent effective DoS attacks is greater than or equal to two. For example, at , , and , the network is affected by DoS attacks. Between and , there are two instants of impulsive control, that is, and . Between and , there are three instants of impulsive control, that is, , , and . When Assumption 2 is not satisfied, whether there is an upper bound of the consensus error, and whether the theoretical derivation is feasible, remains to be discussed in the future.
Illustration for Assumption 2.
Remark 3
Assumption 2 shows that the parameter is important for the consensus, which will be discussed in the subsequent main results. However, it should be noted that the parameter in Assumption 2 depends on the number of effective DoS attacks, rather than the number of all DoS attacks.
Assumption 3
For the nonlinear function , there exists a non-negative constant , for any , such that
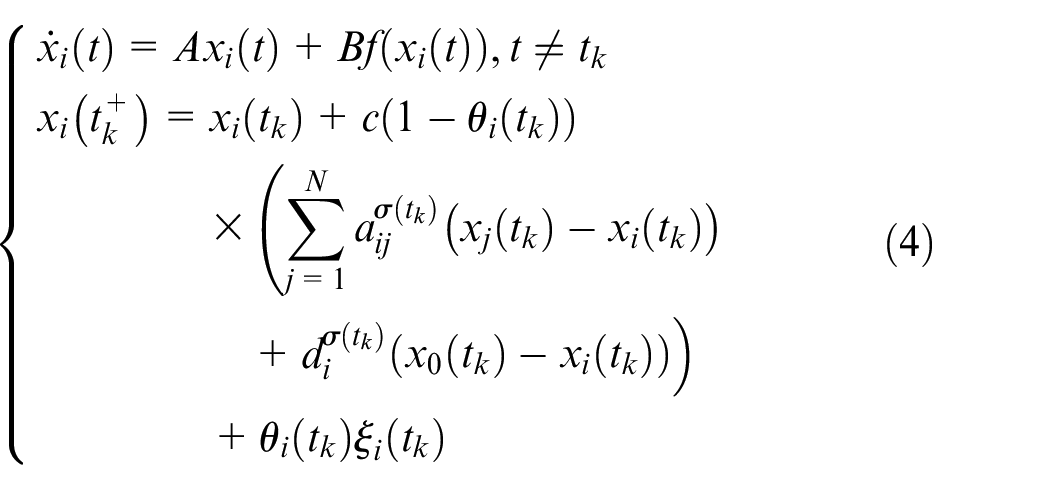
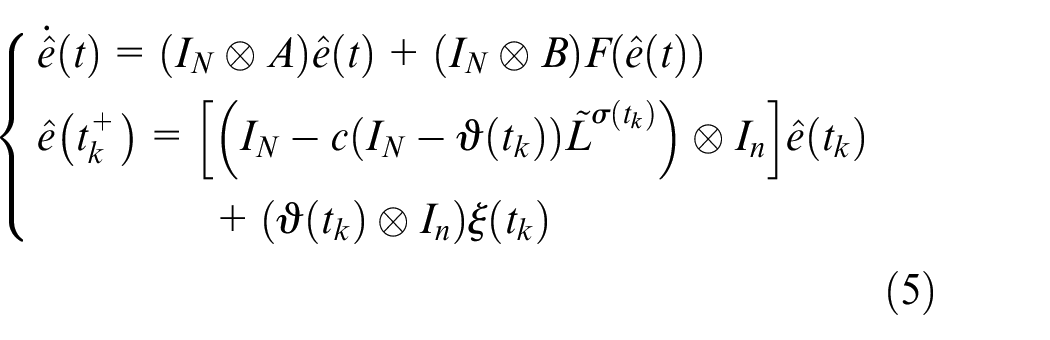
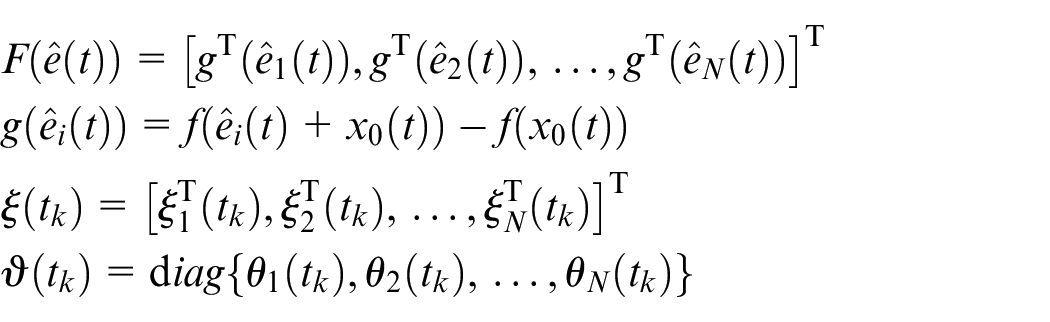
Define the state error , from equations (2) and (4), we obtain the following error system
where
Lemma 1
For any vector , there exists a constant , such that .
Definition 1
The MAS equation (1) is said to achieve MSBC with the leader equation (2), if there exists a closed set and a constant , for any , the expectation of the state error converges to the set
Main results
First, some necessary parameters are given below
Remark 4
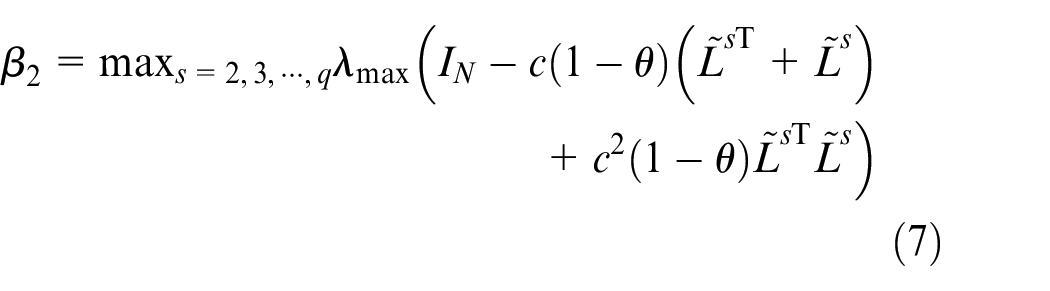
It is worth noting that the parameters and are related to the network topology. Specifically, when the network is not attacked by an effective DoS attack, due to Assumption 1, the graph of topology has a spanning tree, and then we can obtain the appropriate for the feasibility of the main results. When the network suffers from an effective DoS attack, the topology is destroyed and may be unconnected. Moreover, for different DoS attacks, the topologies can be nonidentical; therefore, is defined as equation (7).
Theorem 1
Under Assumptions , if there exist positive scalars , , , , , and a positive-definite matrix , such that
where and . Then, the MSBC for the MAS equation (4) is achieved, and the expectation of the state error system equation (5) converges to the set
As , the MSBC for the MAS equation (4) is achieved, and the upper bound of the error is
Remark 5
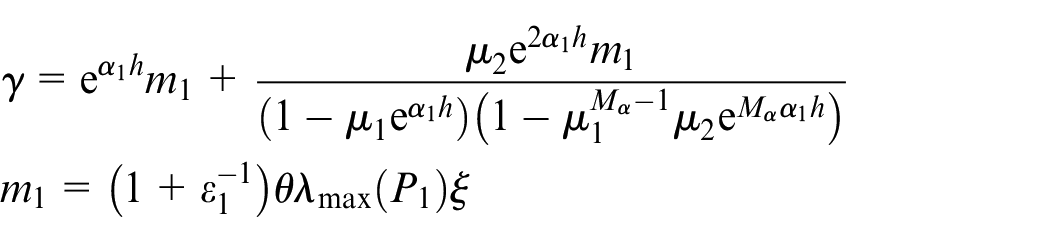
As illustrated above, the upper bound of the consensus error can be represented as
where . Accordingly, this bound is mainly affected by the probability of deception attacks , false data , the maximum impulsive interval , the positive-definite matrix , and parameters , , , and . From equation (10), we can know that is affected by parameters and , and according to equations (6) and (7), we can see that parameters and are related to and , respectively.
Note that the hybrid attacks containing DoS and deception attacks are investigated in Theorem 1, and we know that MSBC can be achieved when MASs are only attacked by deception attacks.24 Therefore, we focus on MASs with only DoS attacks or deception attacks. In Corollary 1, the complete consensus for MASs under DoS attacks is achieved, and in Corollary 2, we obtain the sufficient conditions for the MSBC of MASs under deception attacks.
Corollary 1
Under Assumptions 1 and 3, if there exist positive scalars , , , , , and a positive-definite matrix , such that
where and . Then, the complete consensus for the MAS equation (4) only under DoS attacks is achieved.
Under Assumptions 1 and, 3 if there exist positive scalars , , , and a positive-definite matrix , such that
where . Then, the MSBC for the MASs equation (4) only under deception attacks is achieved, and the expectation of the state error system equation (5) converges to the set
where
Proof
According to Theorem 1, when , we get
When , similar to Theorem 1, we obtain
then
For
For
When , we get
Duo to , let , we get
As , the MSBC for the MASs equation (4) is achieved, and the upper bound of the error is
Remark 6
In Corollary 2, we consider the consensus with only deception attacks and find that the conditions of Corollary 2 are consistent with some existing results.23,24 Accordingly, the related numerical simulation is omitted in the next section.
Numerical simulation
Example 1
In this section, we give a network consisting of a leader agent and four follower agents. The agents are described in equations (1) and (2), where
We assume that each agent moves in the two-dimensional space and the initial states of agents are considered as , , , , and . The parameter of deception attacks is ; thus, the upper bound of attacks is . The nonlinear function is
Due to DoS attacks, the network topology is switching; thus, we set and the network topologies are shown in Figure 3. Figure 3(a) represents the network without DoS attacks, and the networks in Figure 3(b) and (c) are attacked.
Topologies of the networkd: (a) The network without DoS attacks, (b) The agent 2 suffers from DoS attacks and (c) The agent 4 suffers from DoS attacks.
According to the nonlinear function, we can set . By utilizing the knowledge of linear matrix inequalities and equation (8), we get and
Select , , from equations (6) and (7), we obtain and . Furthermore, choose , then, we have , , and . Therefore, we can set . Based on equation (26), one has , then, the frequency of effective DoS attacks can be set to . Combined equation (9), one has . After calculation, the upper bound of error is .
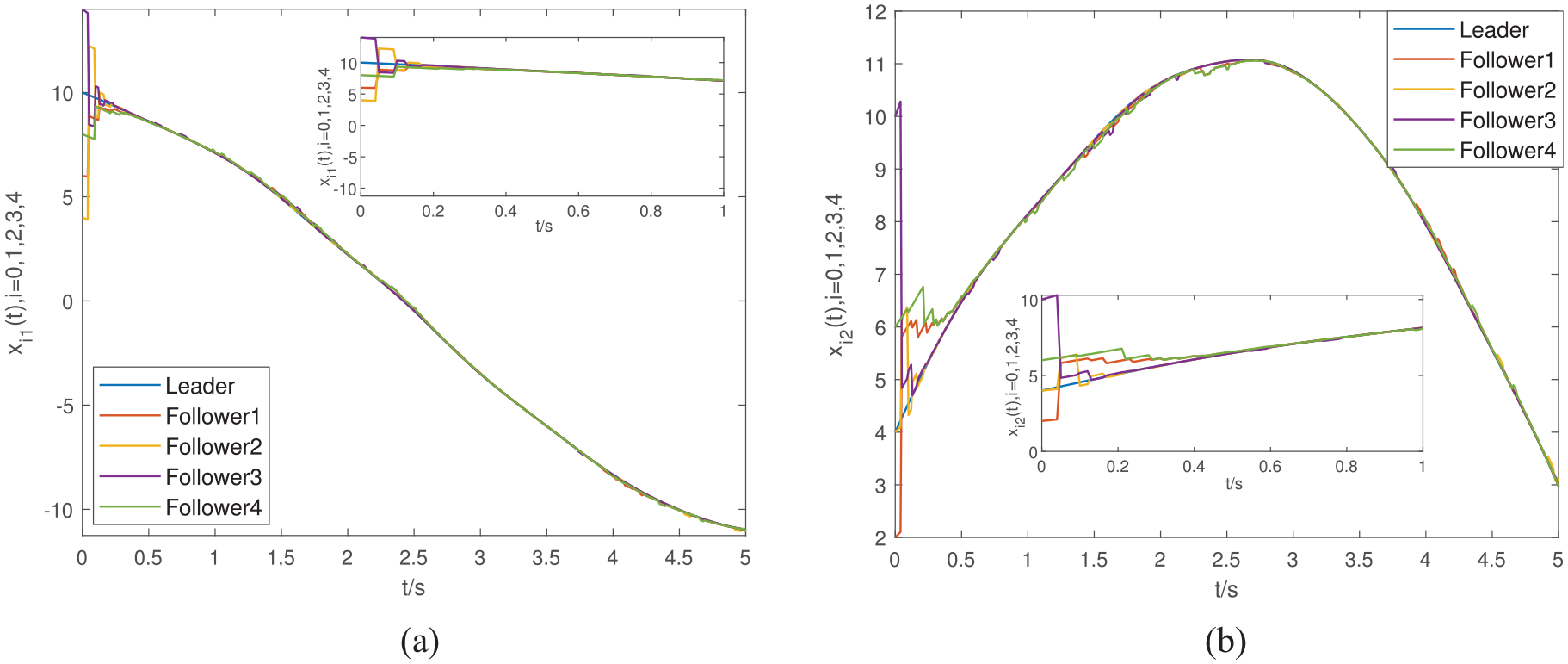
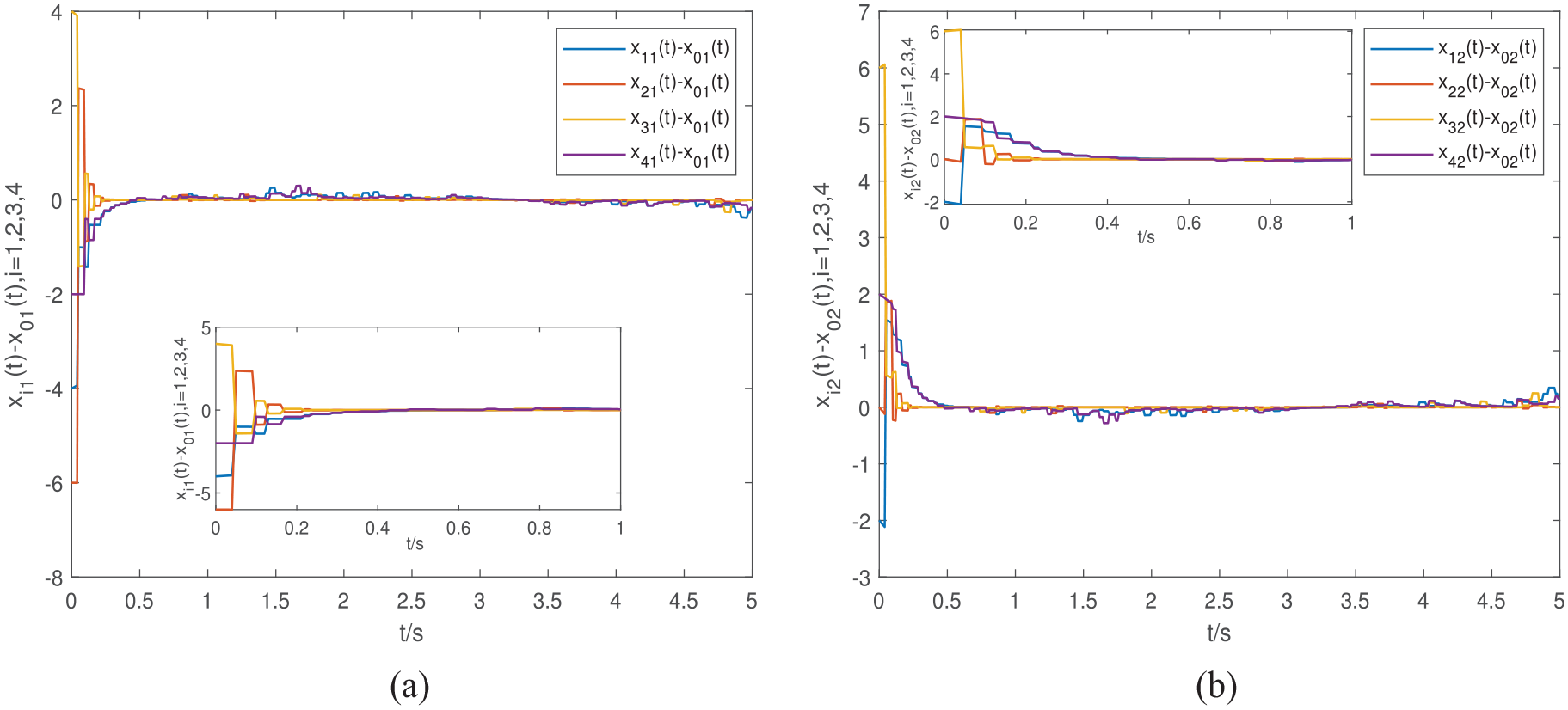
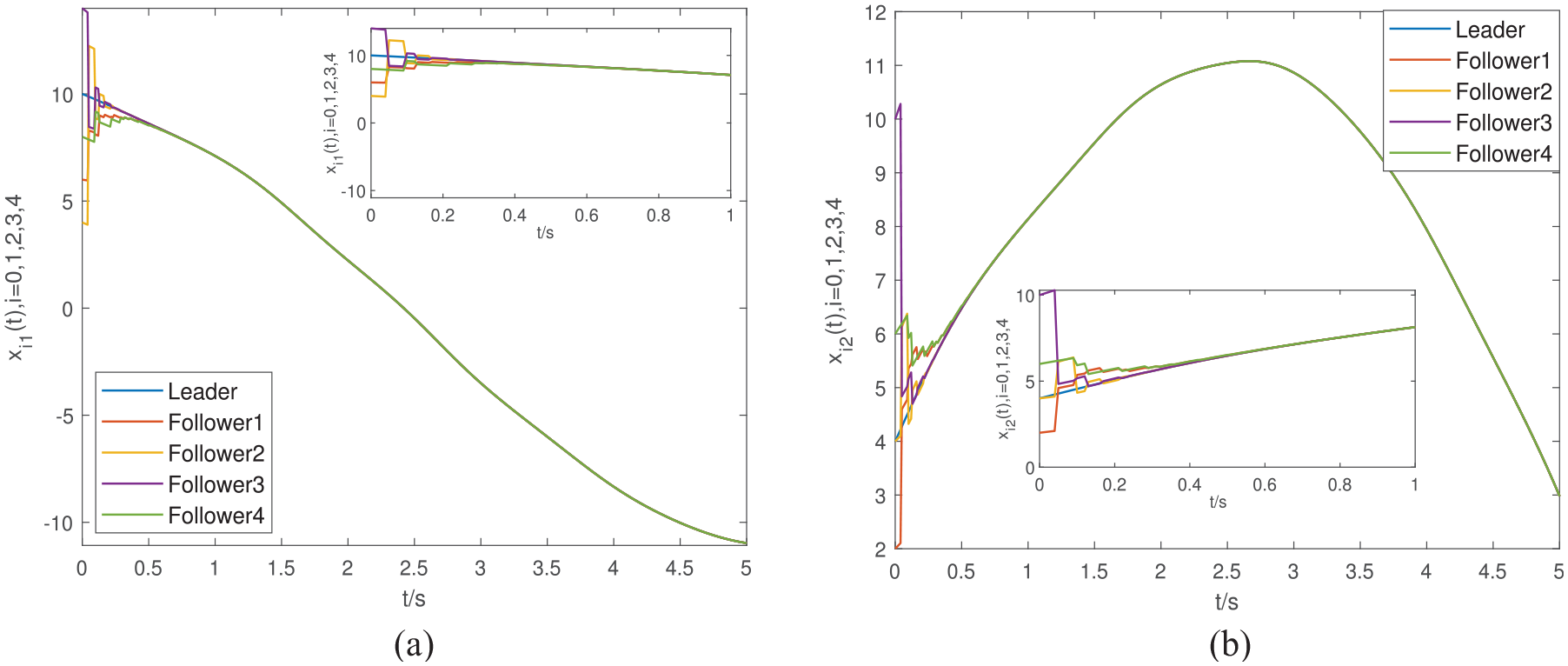
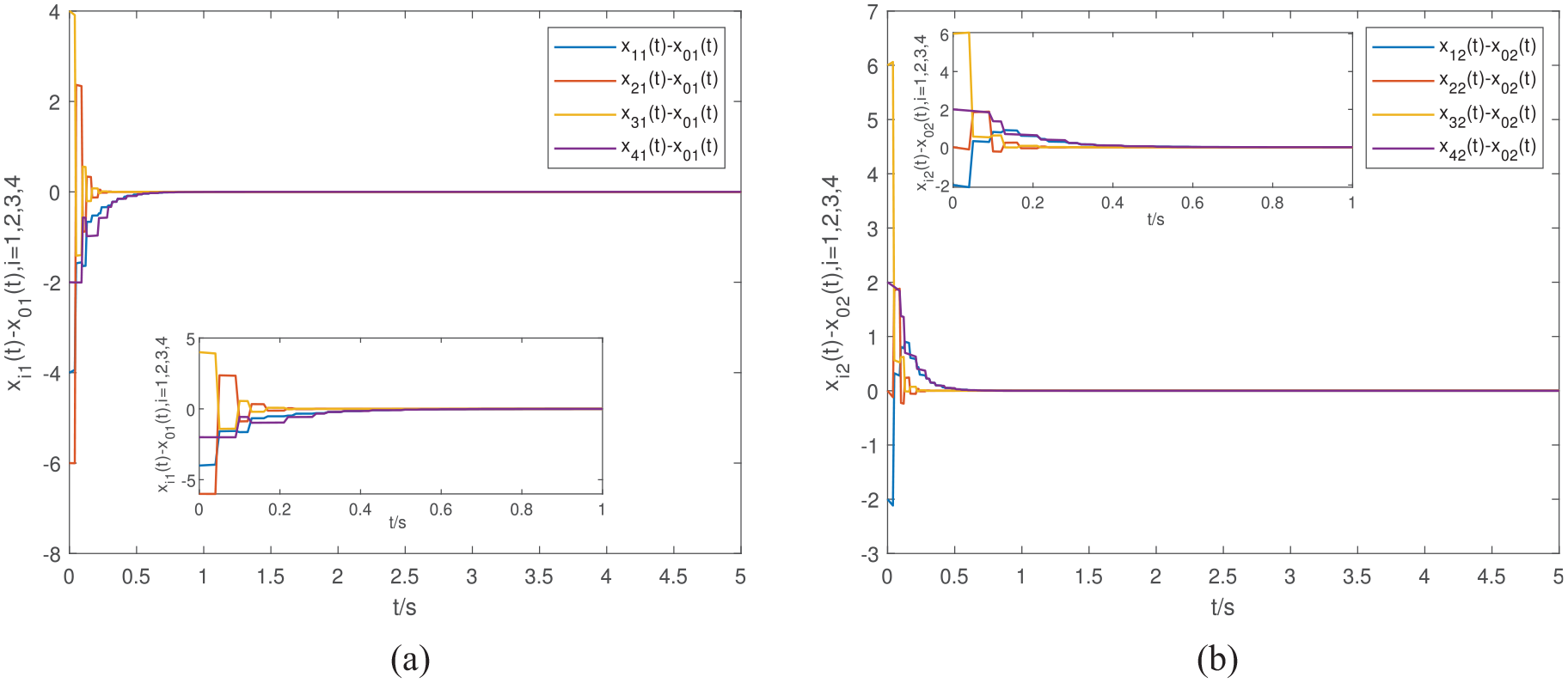
The state trajectories of the leader and followers are given in Figure 4; meanwhile, the error trajectories are also shown in Figure 5, from which, we know that the MSBC is achieved.
State trajectories of the leader and followers in Example 1: (a) The first-dimensional variable of the state trajectories and (b) The second-dimensional variable of the state trajectories.
Error trajectories in Example 1: (a) The first-dimensional variable of the error trajectories and (b) The second-dimensional variable of the error trajectories.
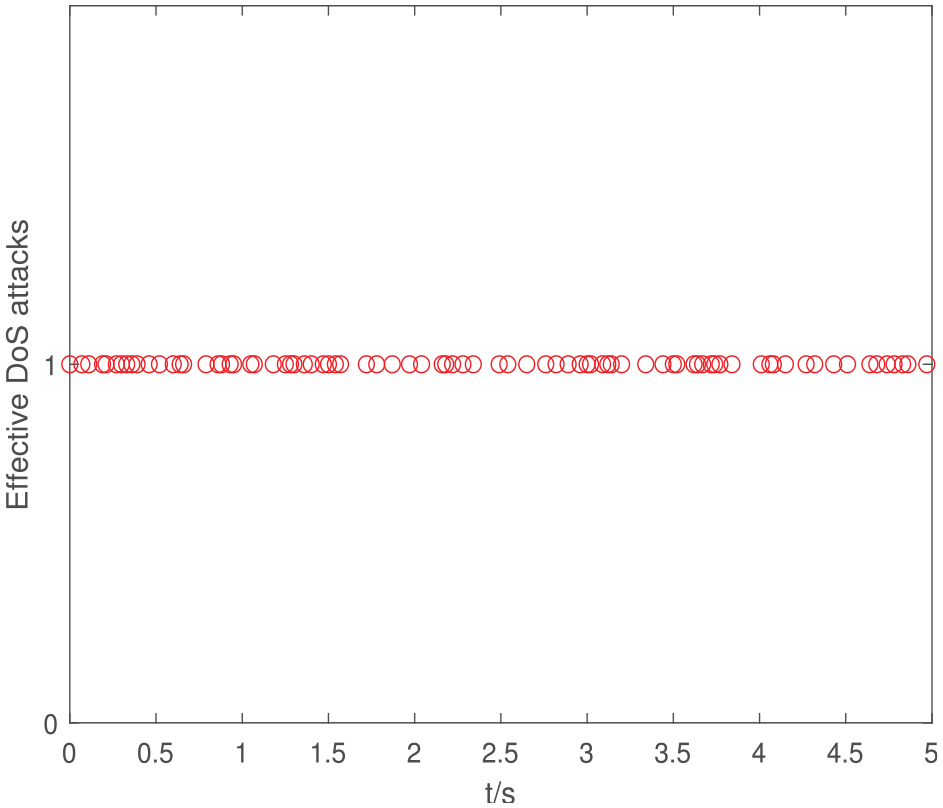
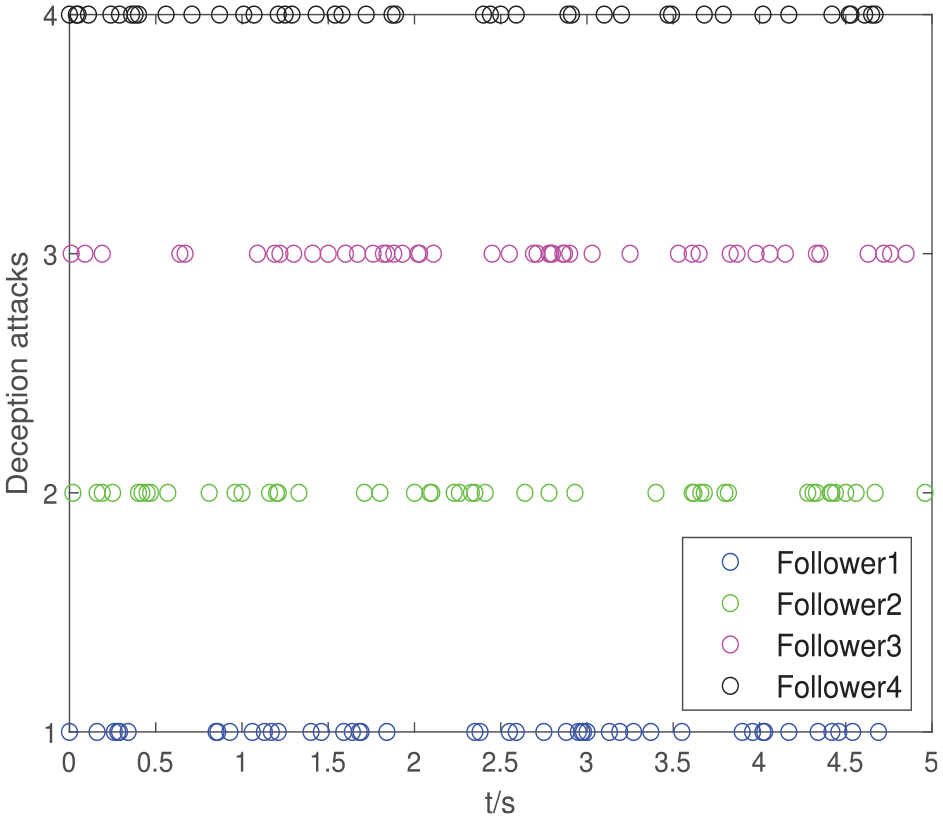
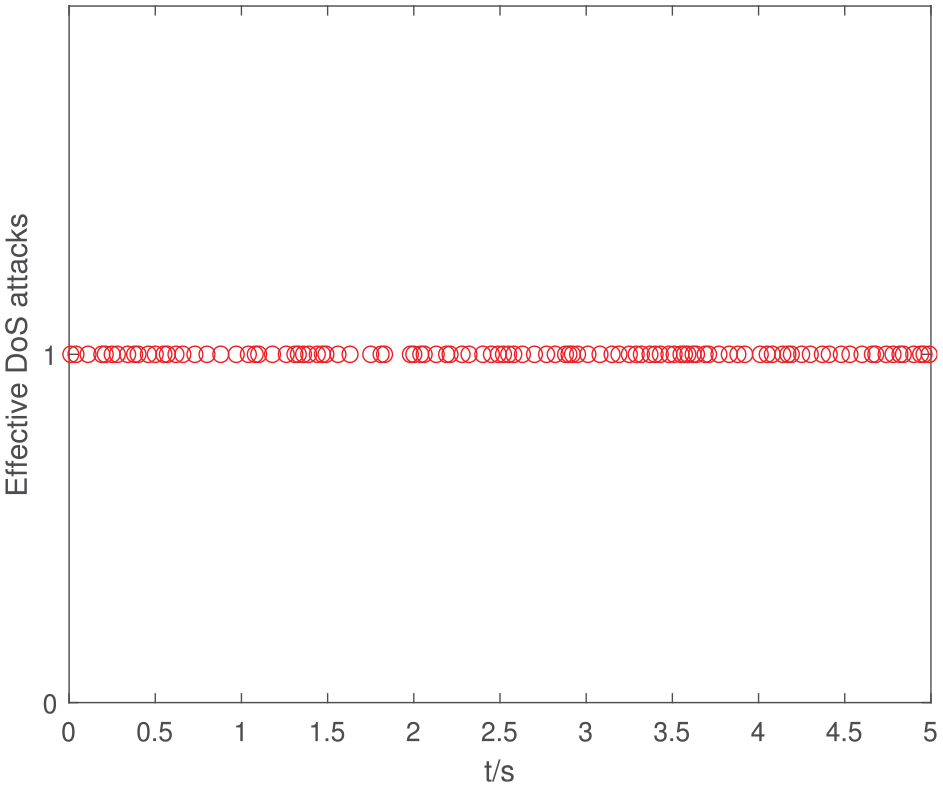
Effective DoS attacks and deception attacks on the network are given as Figures 6 and 7. Specifically, as shown in Figure 6, the red circle represents that an effective DoS attack occurs. In Figure 7, four color circles represent the deception attacks on the followers 1, 2, 3, and 4, respectively.
Effective DoS attacks in Example 1.
Deception attacks in Example 1.
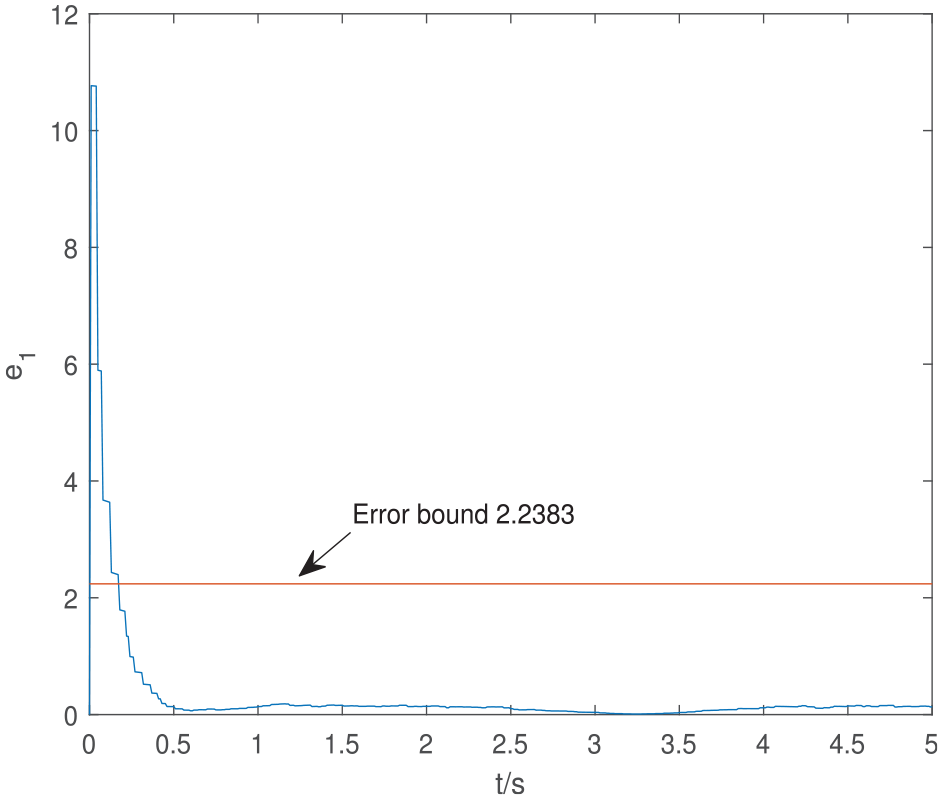
Furthermore, since the deception attacks occur randomly, for reducing the error interference of simulation results, we run the program 50 times, and take the average value of as . The trajectory of is given in Figure 8, and the red line is the upper bound of the consensus error. We can get that the error is far less than ; thus, the MSBC is achieved.
Average error trajectory.
Example 2
In this section, we consider the simulation of MASs only under DoS attacks. The parameters are the same as Example 1; thus, we get , , and . We choose and , from equation (28), we get after calculation, therefore, choose . The state and error trajectories of agents are given in Figures 9 and 10, respectively. We can see that the complete consensus is realized. Moreover, DoS attacks on the network are shown in Figure 11, which occur more frequently compared with the attacks in Example 1.
State trajectories of the leader and followers in Example 2: (a) The first-dimensional variable of the state trajectories and (b) The second-dimensional variable of the state trajectories.
Error trajectories in Example 2: (a) The first-dimensional variable of the error trajectories and (b) The second-dimensional variable of the error trajectories.
Effective DoS attacks in Example 2.
Conclusion
The consensus behaviors of MASs under hybrid attacks are studied in this article. A coexistence attack mode of DoS attacks and deception attacks is proposed, and the consensus error of MASs is analyzed. Meanwhile, the consensus for MASs under a single attack mode is also investigated. Furthermore, the condition for the frequency of effective DoS attacks is put forward. By utilizing the impulsive control, the consensus is realized and the upper bound of error is derived. Finally, the feasibility of the theoretical findings is verified by the simulation results. It is worth mentioning that this work focuses on the leader–following consensus, where the consensus error can be expressed by the difference between the state of a follower and that of the leader. For the other kind of the consensus, that is, the leaderless consensus, it may be difficult to obtain the expression of consensus error for MASs under hybrid attacks, which will be paid more attention in our future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of Jiangsu Province of China under grant BK20181342 and the National Natural Science Foundation of China under grant 61807016.
ORCID iD
Aihua Hu
References
1.
ZhangXHanQGeX, et al. Networked control systems: a survey of trends and techniques. IEEE/CAA J Automat Sinica2020; 7(1): 1–17.
2.
KoukiRBoeAVantroysT, et al. Autonomous internet of things predictive control application based on wireless networked multi-agent topology and embedded operating system. Proc IMechE, Part I: J Systems and Control Engineering2020; 234(5): 577–595.
3.
GeXHanQDingL, et al. Dynamic event-triggered distributed coordination control and its applications: a survey of trends and techniques. IEEE Trans Syst Man Cybernet: Syst2020; 50(9): 3112–3125.
4.
CaoYZhangLLiC, et al. Observer-based consensus tracking of nonlinear agents in hybrid varying directed topology. IEEE Trans Cybernet2017; 47(8): 2212–2222.
5.
ChenYXuGZhanJ, et al. Consensus of the leaderless second-order heterogeneous linear multi-agent system. In: 2021 4th international conference on intelligent robotics and control engineering (IRCE), Lanzhou, China, 18–20 September 2021, pp. 129–135. New York: IEEE.
6.
RezaeeHAbdollahiF. Adaptive leaderless consensus control of strict-feedback nonlinear multiagent systems with unknown control directions. IEEE Trans Syst Man Cybernet: Syst2021; 51(10): 6435–6444.
7.
YaoDLiHLuR, et al. Event-triggered guaranteed cost leader-following consensus control of second-order nonlinear multiagent systems. IEEE Trans Syst Man Cybernet Syst2022; 52(4): 2615–2624.
8.
ZhouYYangYChangQ, et al. Intermittent event-triggered control for finite-time bipartite consensus of second-order multi-agent systems. Proc IMechE, Part I: J Systems and Control Engineering2022; 236(7): 1255–1273.
9.
ZhangZZhangLHaoF, et al. Leader-following consensus for linear and Lipschitz nonlinear multiagent systems with quantized communication. IEEE Trans Cybernet2017; 47(8): 1970–1982.
10.
JiaQHanZTangW, et al. Consensus in multi-agent system under aperiodic denial-of-service attacks. In: 2020 IEEE international symposium on circuits and systems (ISCAS), Seville, 12–14 October 2020. pp. 1–5. New York: IEEE.
11.
DuSYanQDongL, et al. Secure consensus of multiagent systems with input saturation and distributed multiple DoS attacks. IEEE Trans Circuit Syst II: Express Briefs2022; 69(4): 2246–2250.
12.
ZhangDYeZDongX, et al. Co-design of fault detection and consensus control protocol for multi-agent systems under hidden DoS attack. IEEE Trans Circuit Syst I: Regular Papers2021; 68(5): 2158–2170.
13.
LiuLHaoSMaL, et al. Quasi-consensus control for a class of time-varying stochastic nonlinear time-delay multiagent systems subject to deception attacks. IEEE Trans Syst Man Cybernet: Syst2021; 51(11): 6863–6873.
14.
CuiYLiuYZhangW, et al. Sampled-based consensus for nonlinear multiagent systems with deception attacks: the decoupled method. IEEE Trans Syst Man Cybernet: Syst2021; 51(1): 561–573.
15.
HanSZhongQShiK, et al. Consensus of nonlinear multiagent systems with transmission delays and deception attacks via sampled-data control. In: 2021 IEEE 10th data driven control and learning systems conference (DDCLS), Suzhou, China, 14–16 May 2021, pp. 1195–1202. New York: IEEE.
16.
LiuJYinTYueD, et al. Event-based secure leader-following consensus control for multiagent systems with multiple cyber attacks. IEEE Trans Cybernet2020; 51(1): 162–173.
17.
ZhaoGHuaC. Leader-following consensus of multiagent systems via asynchronous sampled-data control: a hybrid system approach. IEEE Trans Automat Control2022; 67(5): 2568–2575.
18.
WangAMuBShiY. Event-triggered consensus control for multiagent systems with time-varying communication and event-detecting delays. IEEE Trans Control Syst Tech2019; 27(2): 507–515.
19.
XuYYaoFChaiS. Distributed event-triggered impulsive consensus control strategy for heterogeneous multiagent systems. In: 2021 China automation congress (CAC), Beijing, China, 22–24 October 2021, pp. 1111–1116. New York: IEEE.
20.
ZhaiYLiuZGuanZ, et al. Resilient delayed impulsive control for consensus of multiagent networks subject to malicious agents. IEEE Trans Cybernet2022; 52(7): 7196–7205.
21.
WangXHeW. Impulsive consensus of leader-following nonlinear multi-agent systems under DoS attacks. In: IECON 2019—45th annual conference of the IEEE industrial electronics society, Lisbon, 14–17 October 2019, pp. 6274–6279. New York: IEEE.
22.
MaTZhangZCuiB. Impulsive consensus of nonlinear fuzzy multi-agent systems under DoS attack. Nonlin Anal: Hybrid Syst2022; 44: 101155.
23.
HeWGaoXZhongW, et al. Secure impulsive synchronization control of multi-agent systems under deception attacks. Inform Sci2018; 459: 354–368.
24.
HeWMoZHanQ, et al. Secure impulsive synchronization in Lipschitz-type multi-agent systems subject to deception attacks. IEEE/CAA J Automat Sinica2020; 7(5): 1326–1334.