
Abstract
This paper presents a method to significantly accelerate optimization of film cooling systems. The method combines high-fidelity computational fluid dynamics with scalar tracking implemented, a proxy model (linear superposition model) initialized with the computational fluid dynamics solution, and a multi-objective evolutionary algorithm approach. The proposed method is structured as follows: the computational fluid dynamics solution is used to predict the (generally complex) flow domain for the film cooling system; the scalar tracking method identifies the contributions of individual holes to an overall cooling effectiveness distribution by associating a unique passive scalar variable to the flow associated with each hole, and solving an additional advection–diffusion (scalar transport) equation; the proxy model is a (generally linear) superposition model implemented – for example – in Matlab, which inherits the scalar values from the computational fluid dynamics solution, and allows extrapolation of solutions to new design points as part of an optimization process; the optimization process is handled with a multi-objective evolutionary algorithm approach which iterates the proxy model to optimize for a defined objective function. The process works with inner and outer convergence loops. The inner convergence loop is the multi-objective evolutionary algorithm interfacing with the proxy model, which achieves convergence against a design target. At the end of each inner loop cycle, a high-fidelity computational fluid dynamics simulation is run, and this is used to recalibrate the proxy model. Convergence for a given objective function is typically achieved with six outer-loop iterations (high-fidelity computational fluid dynamics runs) and 10,000 inner-loop iterations per outer-loop iteration. The significant advantage of the proposed method is that for certain optimization problems, the computational cost can be reduced by several orders of magnitude, replacing thousands of high-fidelity computational fluid dynamics runs with approximately six computational fluid dynamics runs. The process is demonstrated by applying the optimization method to the film cooling of a flat plate. In our example we have an objective function which maximizes the component life (related to the difference from an arbitrary target temperature distribution) and minimizes the mixing loss introduced by the films. The flow environment was moderately compressible. The optimization converged after six computational fluid dynamics runs. A 30% reduction in mixing loss, a 11% increase in component life, and a 30% reduction in cooling mass flow rate were achieved. The advantages and limitations of the proposed method are also discussed in detail.
Keywords
Introduction
Although automated processes for optimization of film cooling systems have been demonstrated by several authors, the open literature reports only a small number studies in which multi-hole configurations were optimized.
Ayoub 1 developed a 3D aero-thermal optimization of a two-rows hole configuration for a vane suction side geometry. This study employed a multi-objective optimization strategy combining artificial neural networks (ANNs) and genetic algorithms (GAs). The ANN was trained with computational fluid dynamics (CFD) simulations and the maximum error in ANN predictions was approximately 20%. External film effectiveness and aerodynamic loss introduced by the film cooling were selected as objective functions. The two independent objective functions were simultaneously optimized using a non-dominated sorting genetic algorithm (NSGA). The optimization involved 60 generations, each of them including 80 individuals. The optimum designs resulting from the combined ANN–GA process were evaluated using 3D steady CFD. The whole optimization process involved 14 CFD runs, each requiring a total wall clock time of two days on eight AMD Opteron processors. The use of ANN to build a substitute model for the high-fidelity CFD can reduce the overall number of CFD simulations employed in an optimization process, though the accuracy of ANN-based models is typically function of the number of CFD simulations used to train the model. A compromise between model accuracy and number of CFD simulations therefore must be made.
Jiang et al. 2 performed aero-thermal optimization of a multi-row film cooling system on a high pressure nozzle guide vane. They considered aerodynamic efficiency and adiabatic film cooling effectiveness in their evaluation of the overall performance. They employed response surface model (RSM) approximation with the NSGA-II. Their optimization converged after 30 generations, each of them including a population of 20 individuals. The RSM model was constructed based on 3D CFD simulations. The total number of CFD simulations was not reported in this study.
Johnson et al. 3 performed a GA optimization of a nozzle guide vane. The objective was to minimize the heat load on the vane pressure side by redistributing arrays of cooling holes across the surface as well as varying injection angle, compound angle, and cooling hole area. Cooling configurations were simulated with 3D Reynolds-averaged Navier–Stokes, by modelling the coolant injection with a transpiration boundary condition (i.e. the coolant injection was simulated as a mass flux source). The optimization process involved 1800 CFD simulations. The design space included a pre-defined matrix of values relative to the film cooling holes.
To date, advanced optimization strategies reported in the literature – based on, for instance, ANNs and RSMs – have required a very large number of CFD runs to train the models and to reach an optimal design.
In this paper, we focus on simple, physically based models to act as proxy for the high-fidelity CFD, with the aim of reducing the number of CFD simulations by one to two orders of magnitude. We introduce a method to dramatically reduce computational cost through the use of a low-order proxy model combined with a linear superposition technique and multi-objective genetic algorithm (MOGA)-based optimization routine. For certain classes of film cooling problems, we show that it is possible to perform optimization with MOGA techniques run with a proxy model, with infrequent recalibration of the proxy model against CFD. This reduces the computational cost by several orders of magnitude, whilst avoiding divergence by using the CFD-recalibration steps. Convergence (of an improved design) can be achieved even if there is a relatively high error between the extrapolated proxy model and the corresponding CFD solution at the recalibration step. This is because these errors are removed at each recalibration step, until recalibrated proxy model (inner loop) and CFD solutions (outer loop) are converged. Using this hybrid technique, we show that it is possible to achieve convergence within six CFD runs. For certain classes of problem, this would be true even for very complex geometries and very high-fidelity CFD methods (including LES).
We now describe the principles of the optimization methodology before applying it to an example test case.
The scalar tracking method
The scalar tracking method for film cooling systems was originally proposed by Thomas and co-workers.4–6 In the method, a unique passive scalar variable,
At the inlet to each hole, say, hole 1, the scalar variable associated with that hole,


The energy equation for the volume is given by
Small control volumes containing fully mixed fluid (a) in the freestream and (b) at a wall.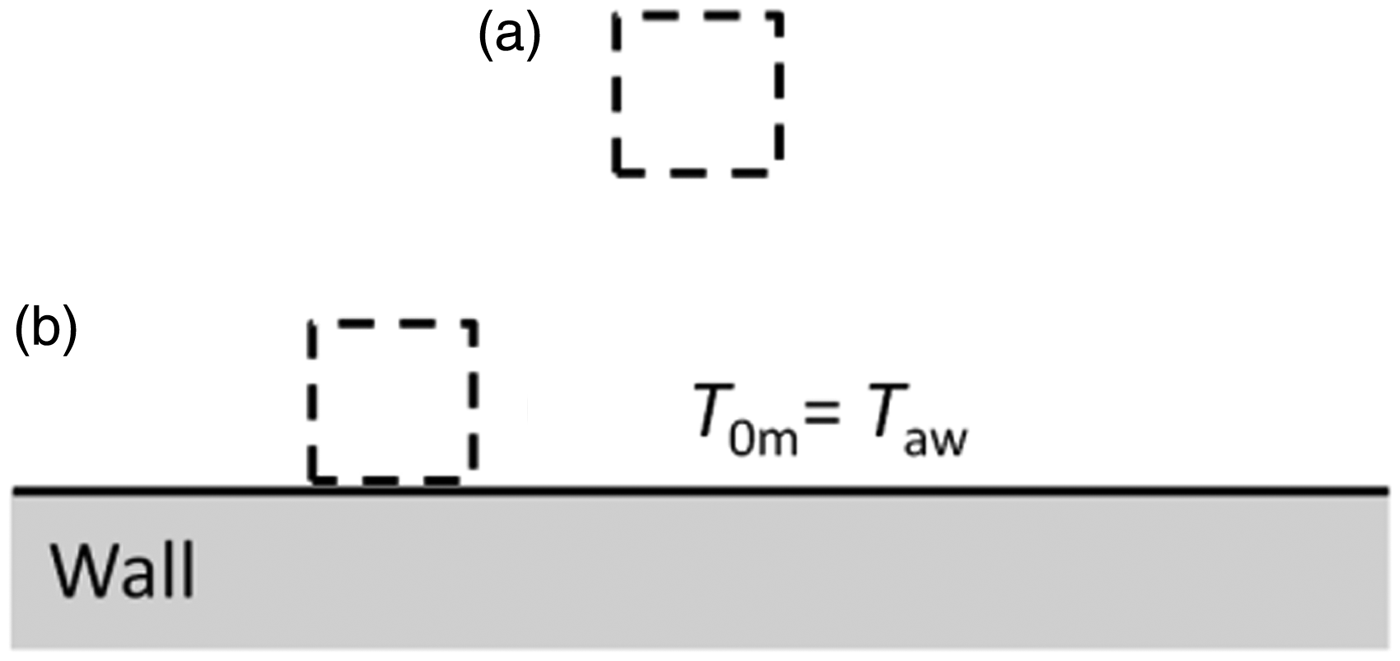





Adjacent to the wall (b), in case of an adiabatic wall and incompressible conditions, the adiabatic wall temperature,

The steady-state advection–diffusion energy equation is


In the scalar tracking method, to ensure that the scalar field mimics the thermal field, a transport equation is defined for each scalar,

Equation (8) allows the overall cooling effectiveness to be calculated from the sum of the scalar variables. This, on its own, is not beneficial. The advantage of the method, however, is that by examining the scalar concentrations in the downstream flow the individual contribution from each hole can be calculated at every point in the downstream flow field. By extracting these concentration fields, individually for each cooling hole, a proxy model can be built allowing rapid optimization out of the CFD loop, with occasional recalibration against CFD. The proxy model can have any desired level of complexity, ranging from linear (with mass flow rate) to more sophisticated models which include some level of flow modelling.
In this paper, we demonstrate the method using ANSYS-CFX for CFD solutions. Additional scalar transport equations were defined by using a script written in CEL – a Perl-based CFX programming language. The scalar concentration fields were extracted from each converged CFD solution and fed into a proxy model written in Matlab. Optimization steps were conducted in the proxy model, before being handed back to CFD for recalibration. The process is now described in detail.
Combined scalar tracking CFD and MOGA method
In this section, we present the combined scalar tracking, CFD, and MOGA method.
At high level, the principle of the method is to use a proxy model (implemented in Matlab) of the film cooling system in a MOGA optimization routine and periodically calibrate the proxy model against a high-fidelity CFD solution. We refer to MOGA/proxy model combination as the inner loop and to the high-fidelity CFD as the outer loop. The two loops are converged together, but with many thousands of iterations in the inner loop and a small number of iterations in the outer loop. Periodic recalibration keeps the inner loop from diverging from the outer loop, and therefore means the proxy model remains a reasonable representation of the flow system throughout the convergence process. Because the inner and outer loops are converged together, the residual between the two is small in the final step, and the final design is confirmed with CFD. The process is similar to conventional MOGA-CFD optimization processes, but with savings of many orders of magnitude in computational cost. We now describe the model in detail.
Defining the objective functions
Objective functions are defined, which set the target to optimize against. In our example, below, we seek to maximize component life and minimize aerodynamic loss, so generate two objective functions addressing each of these targets. As with all automated optimization routines, the definition of this function determines the outcome of the optimization.
Defining and initializing the proxy model with a first CFD solution
The scalar tracking method is implemented in CFD to identify the contribution to the overall film effectiveness distribution of the flow from a particular film cooling hole. In the proposed method, an initial CFD simulation is run on a first generation design to evaluate both the individual scalar concentrations (in the entire downstream field, if desired) and the individual hole mass flow rates. These are then used to initialize the proxy model which at the first iteration gives (by definition) identical results to the CFD simulation, and in subsequent iterations allows extrapolation via linear superposition to provide a rapid means of design optimization. The proxy model can be line-based (targeting an individual axial plane downstream) or full-surface, depending on the fidelity of the prediction required.
Defining the exchange rate between hole diameter and mass flow rate
For the case of a film cooling optimization for a system with fixed internal pressure (analysis of a coupled system would follow by extension of the method), the hole diameter and position are variables to be adjusted (iterated) by the MOGA to optimize against the target function. This requires a model that estimates the change in contribution to the film effectiveness when the hole diameter and/or position are changed. In the present study, we used a compressible flow model of a hole, with discharge coefficients determined on a per-hole basis from CFD. The discharge coefficient was recalibrated at every outer-loop iteration of the process. In principle, any reasonable model can be used. The coolant feed total pressure was the same for all holes and the external static pressure was determined from the CFD solution and the proxy model recalibrated at every CFD (outer loop) step.
Defining the effectiveness contribution for new hole locations
In systems where hole location is included as a variable, the effectiveness field associated with a new (or moved) hole location could be determined as a linear interpolation of the effectiveness contributions from nearest neighbour holes, weighted appropriately for mass flow rates. In the current study, this step was omitted but is a natural extension of the method.
MOGA extrapolation of the proxy model
Once the proxy model is generated and initialized, and the exchange rates for hole diameter and mass flow are defined, a MOGA optimization is performed on the proxy model. In this scheme the hole mass flow rates (varied using the diameter) are adjusted using the MOGA algorithm to improve the fitness of the solutions as measured by the objective function. The MOGA optimization is performing an extrapolation, and this is only as good as the proxy model. In our example, we have a simple superposition model, which is accurate for small extrapolations, but increasingly inaccurate where flow rates are changed by an amount that might affect the overall flow structure (there is no physical model of this in the proxy model). To stabilize the solution, we restrict the extrapolation that is allowed within a single convergence period of the proxy model. For multi-objective problems, the MOGA process generates a Pareto front of so-called Pareto-optimal designs. One design must be – somewhat arbitrarily – chosen from this front and will be passed to the outer loop for recalibration with a CFD model. Different strategies can be taken, and we discuss a particular example later in this paper.
CFD validation of the MOGA/proxy model output
After convergence of the inner loop (MOGA algorithm and proxy model), the chosen (‘fittest’) design is passed to the outer loop and a CFD simulation performed. The results of the CFD simulation, measured in terms of the objective functions, are compared to the optimizer prediction. Provided the proxy model is sufficiently accurate over the extrapolation distance, the fitness of the CFD solution will be improved over the previous design.
Stability check of the proxy model over a particular outer-loop iteration
The accuracy of the proxy model over the extrapolation distance can be assessed by comparing the differences in film effectiveness between the previous-generation and current-generation designs as predicted by the proxy model and the CFD model. If the differences are similar, the proxy model was stable over the extrapolation distance. An example of this check is given later in the paper.
Recalibration of the proxy model
The following information is now extracted from the CFD solution, for the purpose of recalibrating the proxy model: the external static pressure distribution, individual hole mass flow rates, passive scalar concentration field. Once the proxy model is recalibrated, it will be an exact representation of the current-generation CFD solution. The MOGA/proxy model routine (inner loop) is now iterated to convergence to define the next generation design. The process is then repeated until the converged solutions cannot be improved as measured by the objective functions. The process is shown schematically in the flow chart of Figure 2.
Flow chart of the combined scalar tracking, CFD, and MOGA method. The dashed line represents the next step (in relation to the numbering in the blocks, i.e. the pause point) of the process. CFD: computational fluid dynamics; MOGA: multi-objective genetic algorithm.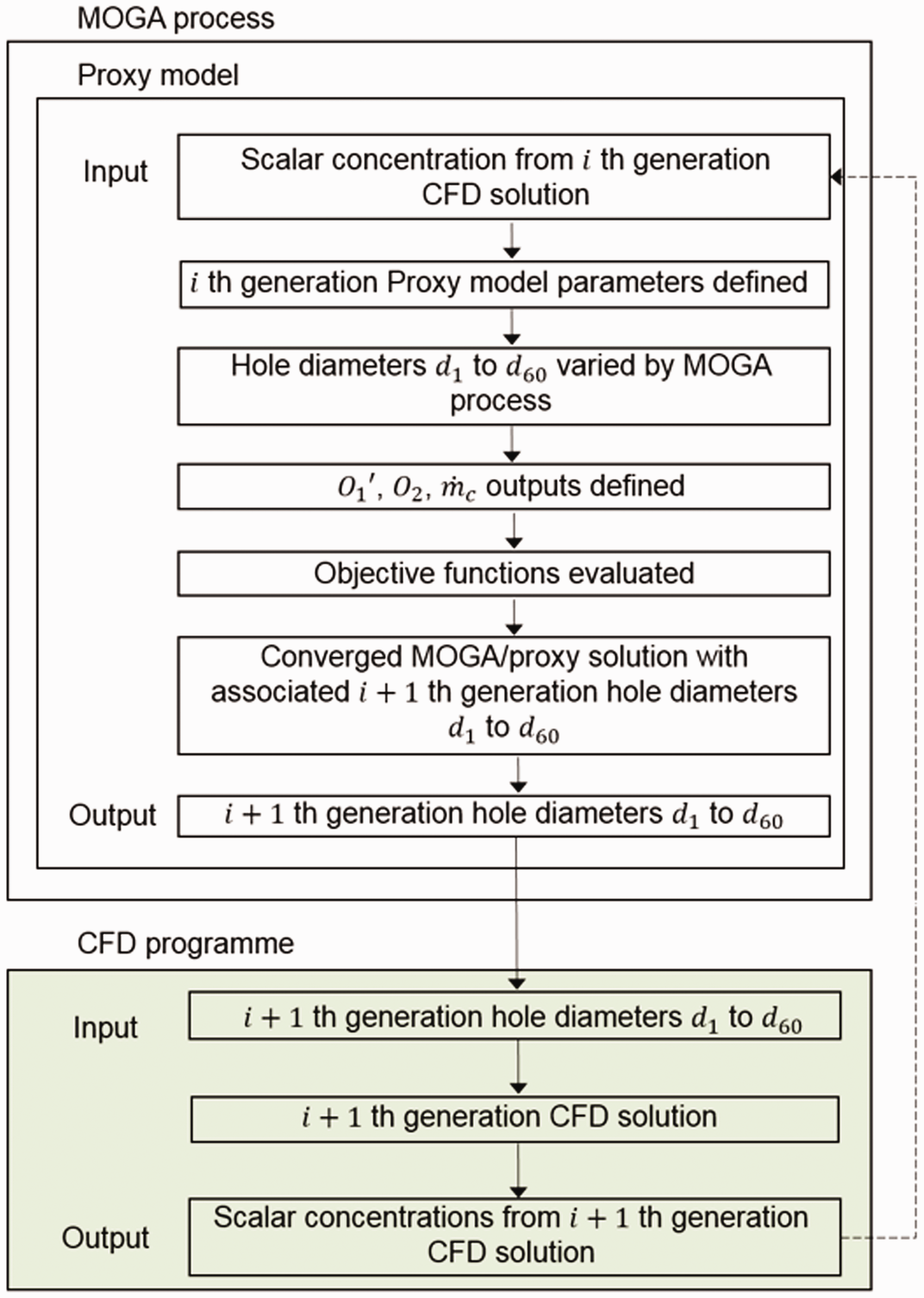
Flat plate test case
In this section, we describe the test case used to demonstrate the proposed optimization method. We first describe the general design of the test case and then discuss the application of the proposed method to the particular example.
General design of the flat plate test case
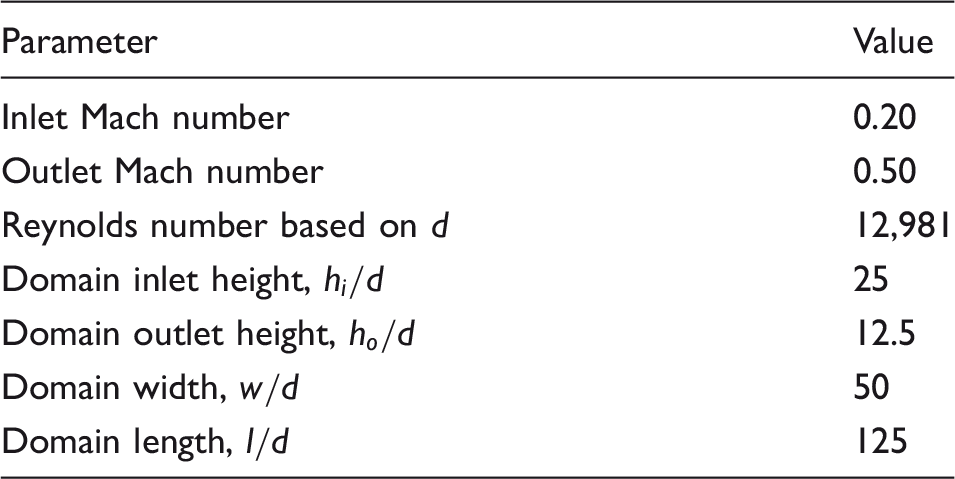
The isentropic relations were used to perform a preliminary assessment of the flow variables changes along the length of the test case domain (see Figure 5). The domain has a length given by Axial distribution (from domain inlet to outlet) of flow variables predicted by isentropic equations for the test case shown in Figure 5.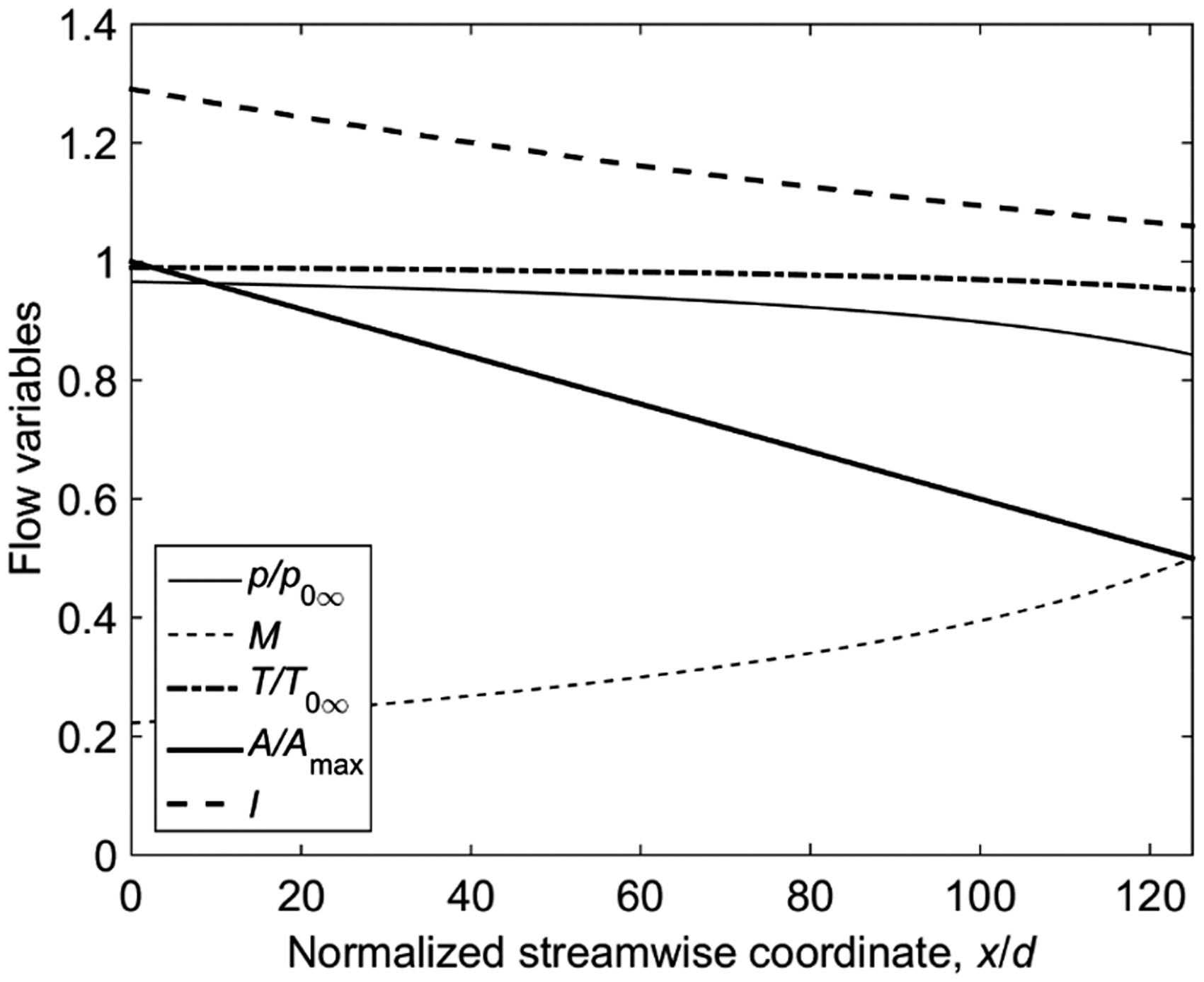
The Sellers model 13 was employed for rapid preliminary assessment of the adiabatic film effectiveness distribution resulting from a multi-row film cooling configuration. The objective was a flat plate cooling design with a minimum distance between two rows of holes that would allow for substantial mixing of the films (see later discussion) between each row. As we discuss later (see discussion regarding limitations of the proposed optimization technique), this reduces the chance of discrepancies between the proxy model and CFD recalibration step resulting from local changes in flow field caused by strong interaction of holes. It is not a requirement for the method that such interactions are limited, but it makes the convergence process easier to interpret (extended discussion in later section).
To initialize the Sellers model, a 3D CFD simulation was run for a single hole. The coolant plenum was fully resolved in the CFD model. The hole was (somewhat arbitrarily, as the flow is accelerating) set to have a momentum flux ratio of I = 1.06, equivalent to an axial coordinate of Streamwise distribution of film effectiveness along the hole centreline for: a single hole CFD prediction (dashed red line), an extrapolated single hole CFD prediction (solid red line), and a prediction of the superposition of three rows using the Sellers method (for a row spacing of 25 d). CFD: computational fluid dynamics. Diagram of the computational domain: (a) side view and (b) plan view, showing initial film effectiveness distribution.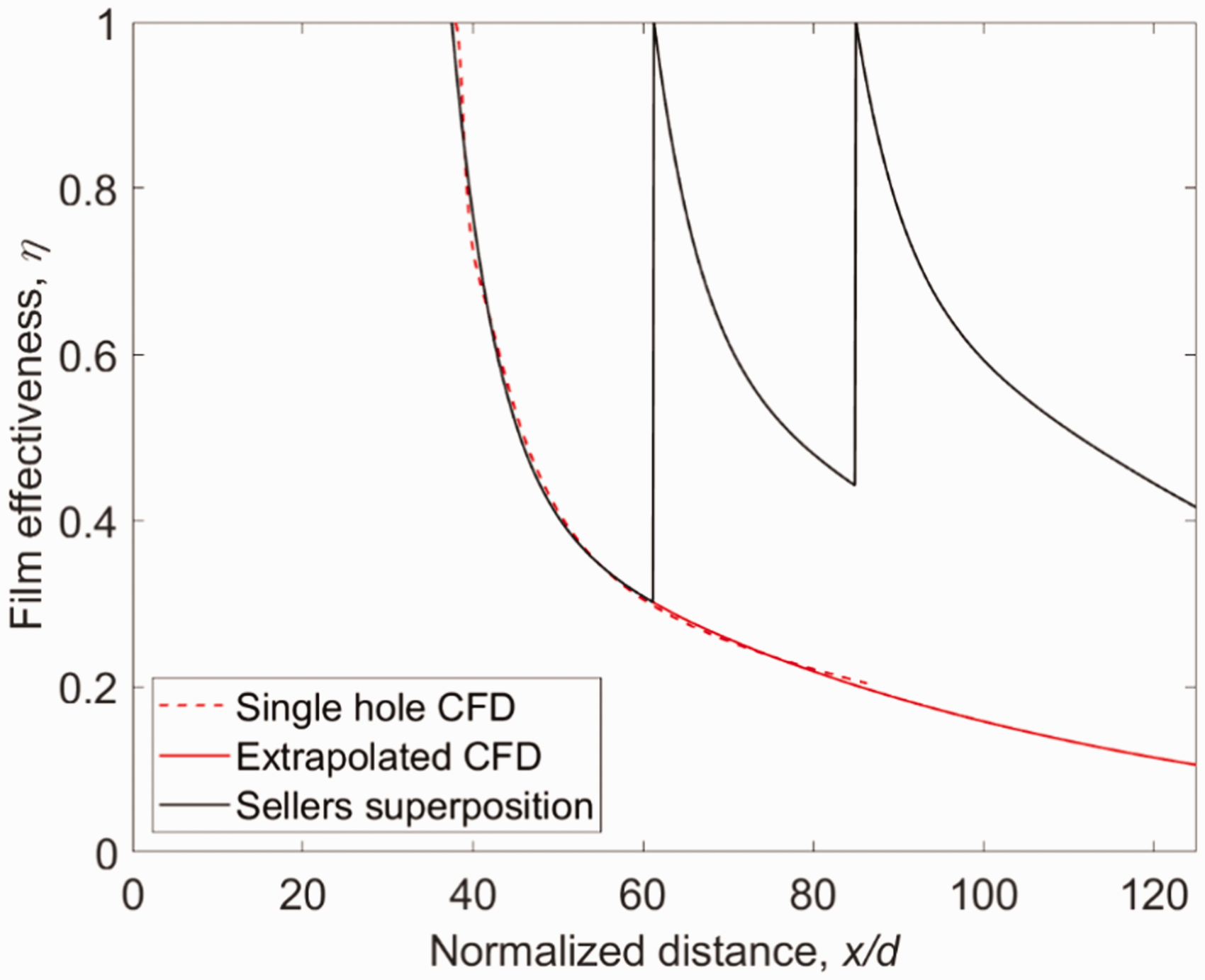
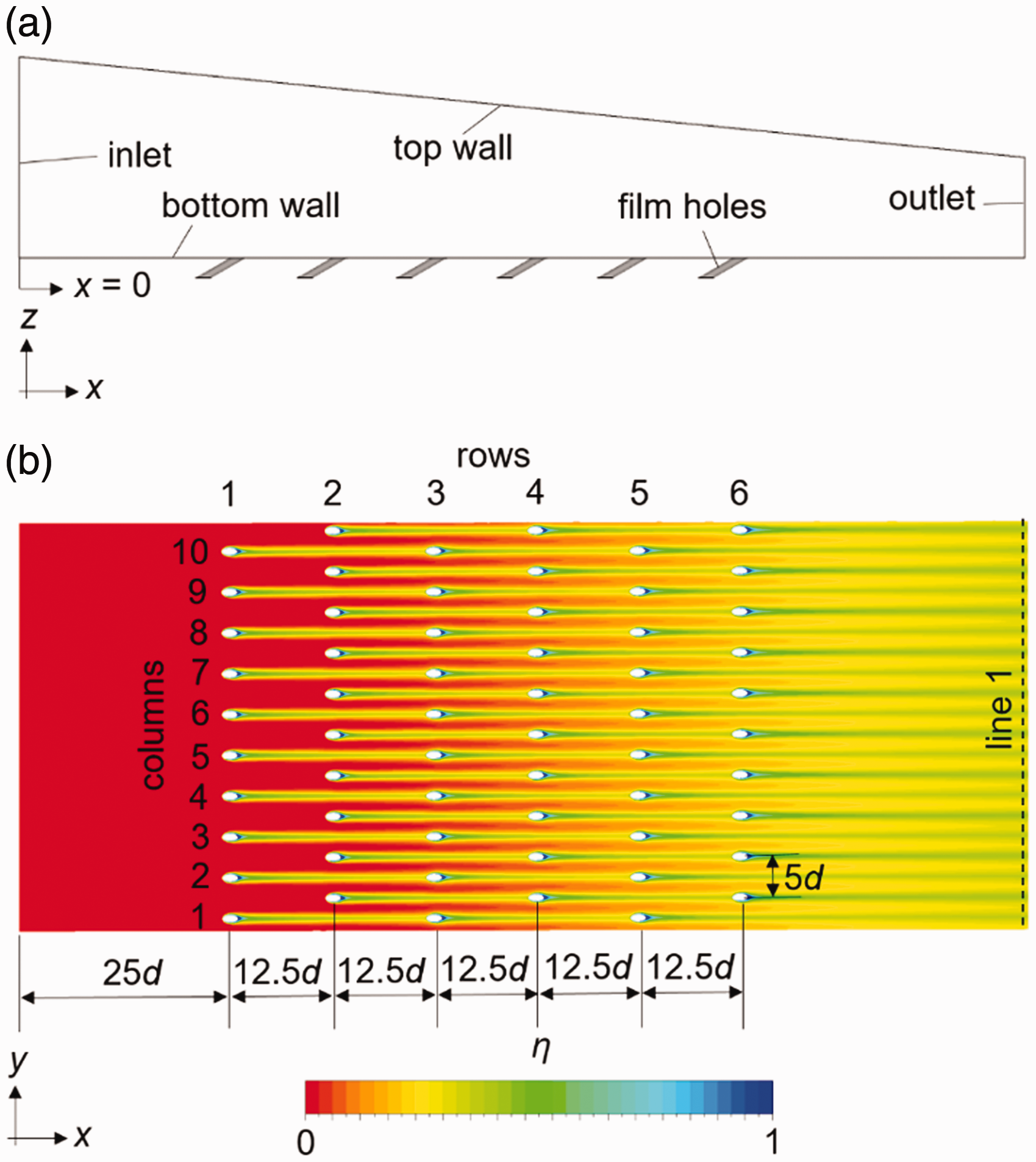
Based on the superposition results of Figure 4, a uniform streamwise spacing between aligned rows of approximately
The hole spacing in the lateral direction, y, was chosen so as to ensure minimal hole-to-hole interaction effects up to a streamwise distance of 50d. By visually inspecting the CFD results used to seed the Sellers model (domain width of
A development length at the domain inlet was somewhat arbitrarily set to
The final configuration is shown in Figure 5. A staggered row configuration with
Flow properties and geometrical parameters of the computational domain.
Defining the objective functions
In this study, we are interested in both component life and aerodynamic loss. We thus have two objective functions which we now consider in turn.
Component life is related to surface temperature. We consider the difference between the local wall temperature 

This relationship for oxidation life is representative of the typical engine situation for hot components. The characteristic of the objective function is such that undercooling ( Life objective function, 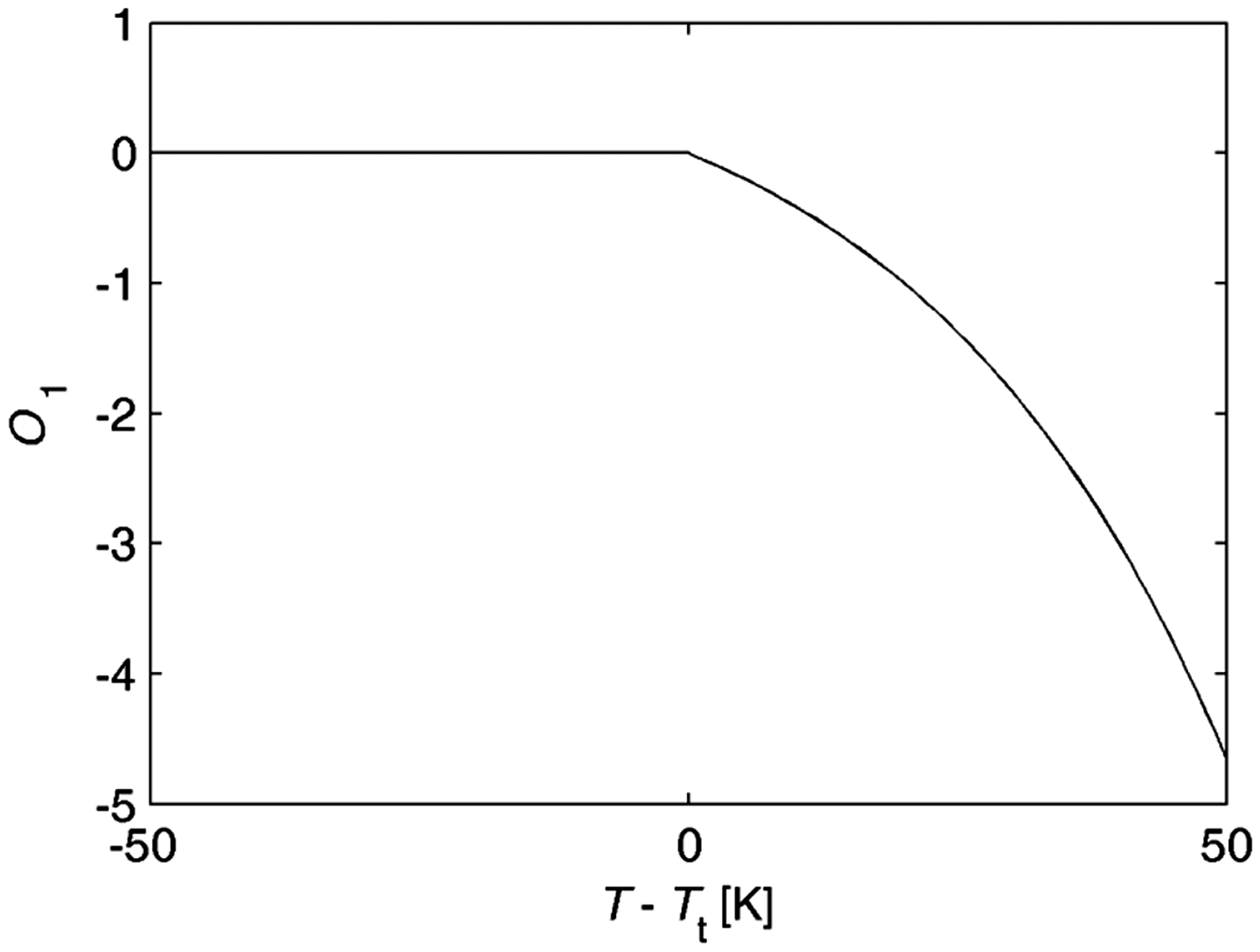
We note that for our adiabatic case, the difference between surface temperature and target temperature can be expressed in terms of the adiabatic film effectiveness, thus

In general, such an optimization would consider the entire surface and form part of a coupled solution in which the contribution of an internal cooling system was also accounted for. In our simple example, we set a target film effectiveness distribution at only a single axial location (approximately 
We now consider the film cooling loss objective function. We include two elements: the kinetic energy loss due to aerodynamic mixing and the thermodynamic loss due to heat transfer between coolant and mainstream.
We conceptualize a mixing layer in which a coolant flow rate, Schematic of the mixing layer.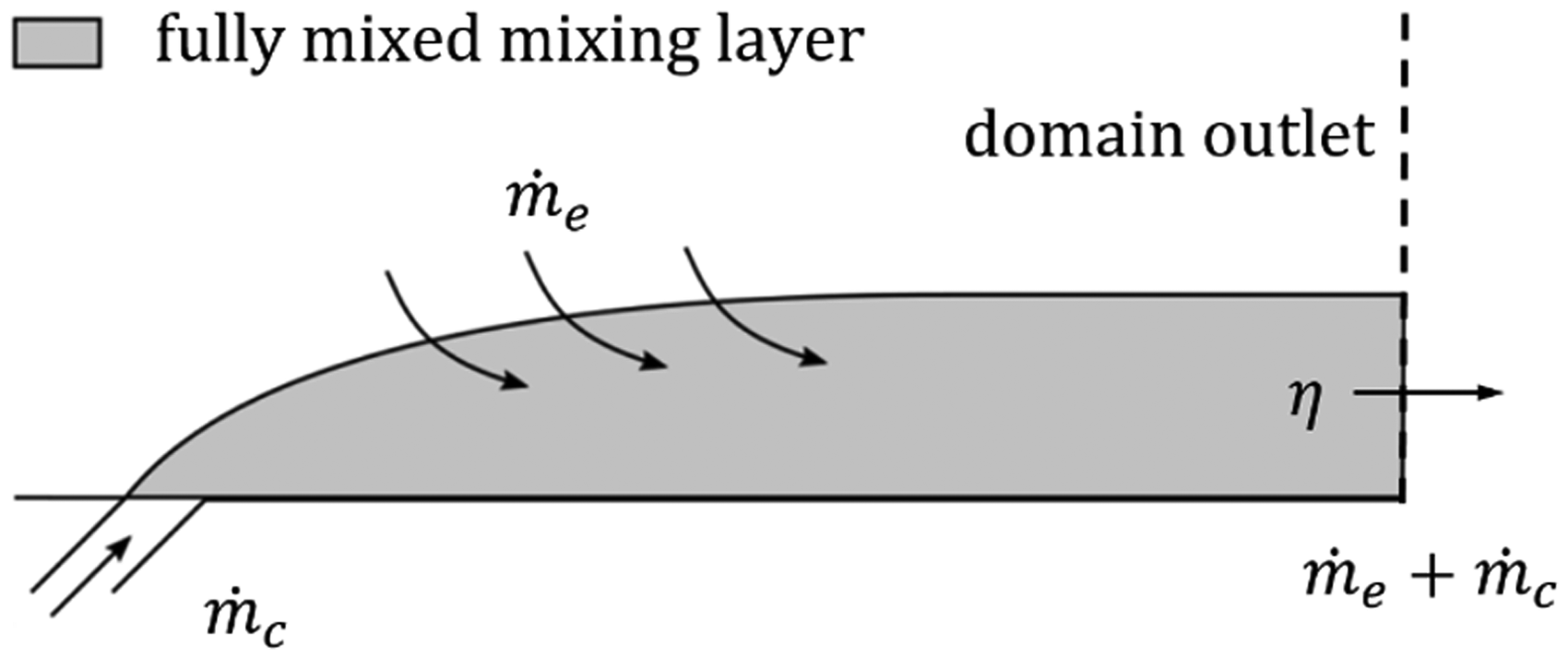
Once
The Hartsel model
7
solves for continuity, momentum, and energy in an assumed constant pressure (
Assuming that 

In our loss model, we also include the contribution due to thermal mixing loss, or entropy production rate due to heat transfer between coolant and mainstream. This term was derived by Young and Wilcock
9
and is given by the following equation



CFD setup and initialization of the proxy model
CFD simulations were performed with ANSYS-CFX. Mainstream gas and coolant were simulated as ideal gases with gas properties. The
The computational grid was generated by using BOXERMesh and had 16.9 × 106 tetrahedral and hexahedral elements. A detailed view of the surface mesh is shown in Figure 8(a), and a detail of a lateral cut through a cooling hole in Figure 8(b). The grid resolution on the cooled wall and film holes was increased to resolve high temperature gradients. The near wall region was refined with 12 prism layers with an expansion ratio of 1.2. The value of the area-averaged normalized wall distance (based on Re) was below 5 over all wetted surfaces (Figure 9(a)).
(a) Plan view of the cooled-wall surface mesh and (b) lateral view of the mesh. (a) Contours of 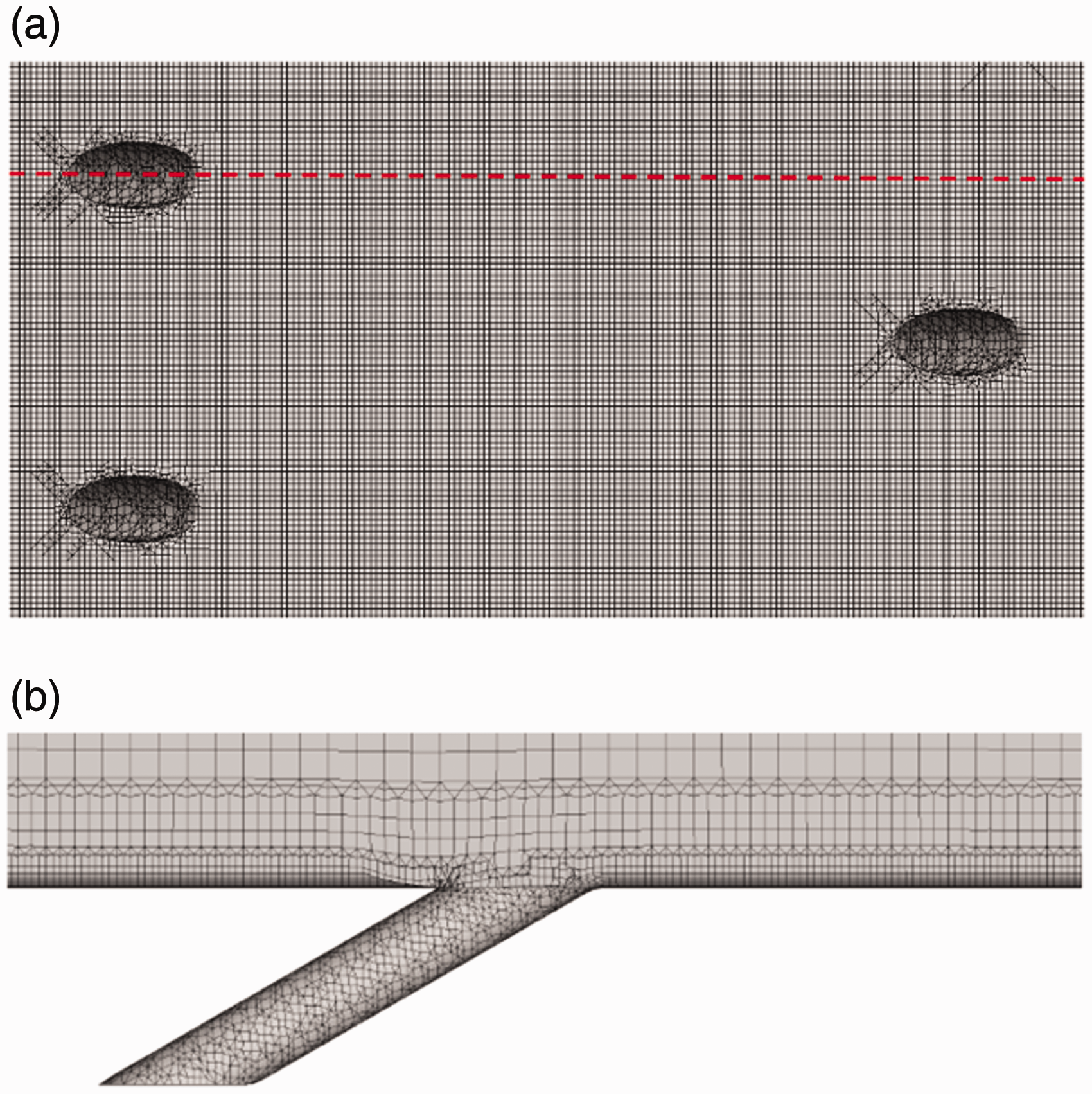
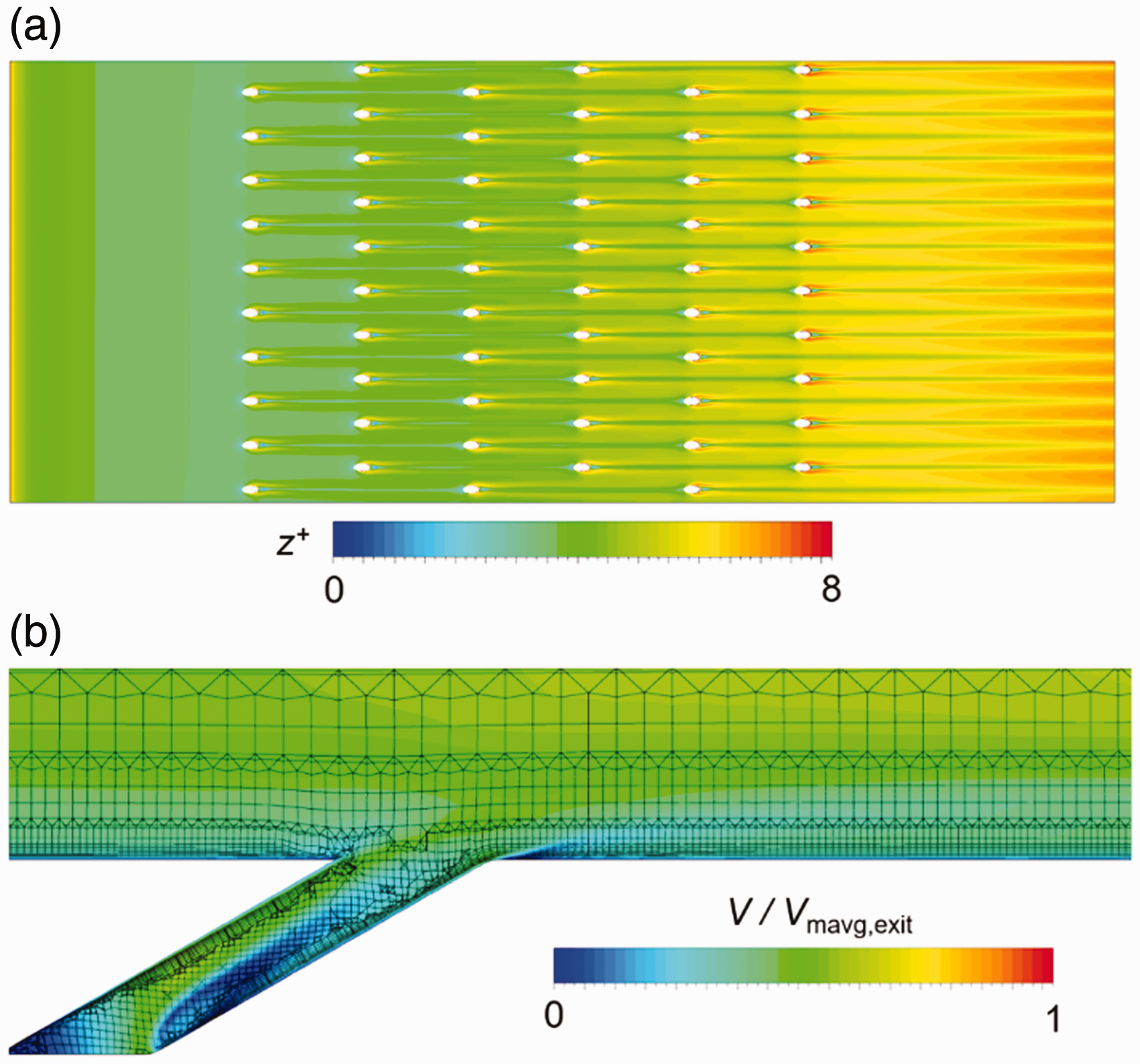
Figure 9(b) shows contours of velocity normalized by the mass-averaged value at the domain exit on a plane through a centre-hole (
Defining the exchange rate between hole diameter and mass flow rate
The exchange rate between hole diameter and mass flow rate was estimated by the following equation for compressible flows

Details of the MOGA algorithm used in the present example
The JEGA evolutionary algorithm library, developed within the DAKOTA (C++ based, open source platform 10 ) software, was used. GAs are widely exploited for function optimization. The GAs are so-called because they mimic the evolution process of biological systems in nature. During the optimization, populations of ‘genomes’ are generated and individuals with the highest fitness are selected for the next population. In GAs, each individual is a binary string which represents a design. Natural processes such as crossover and mutation are simulated in GAs via recombination of bits within binary strings. In particular, crossover is performed through the construction of a new child genome using portions of two or more parent genomes. Without mutation, genomes may become too similar and the process may be slowed or even trapped in local minima.
For the present work, the MOGA algorithm developed by Eddy and Lewis 11 was employed. This is a rank-based fitness assignment algorithm for multi-objective optimization problems. 12 Unlike single objective strategies, the optimal solutions of a multi-objective optimization are a Pareto front formed by designs for which none of the objective functions can be improved without degrading one of the other objectives. Designs belonging to the Pareto set are called non-dominated or Pareto optimal.
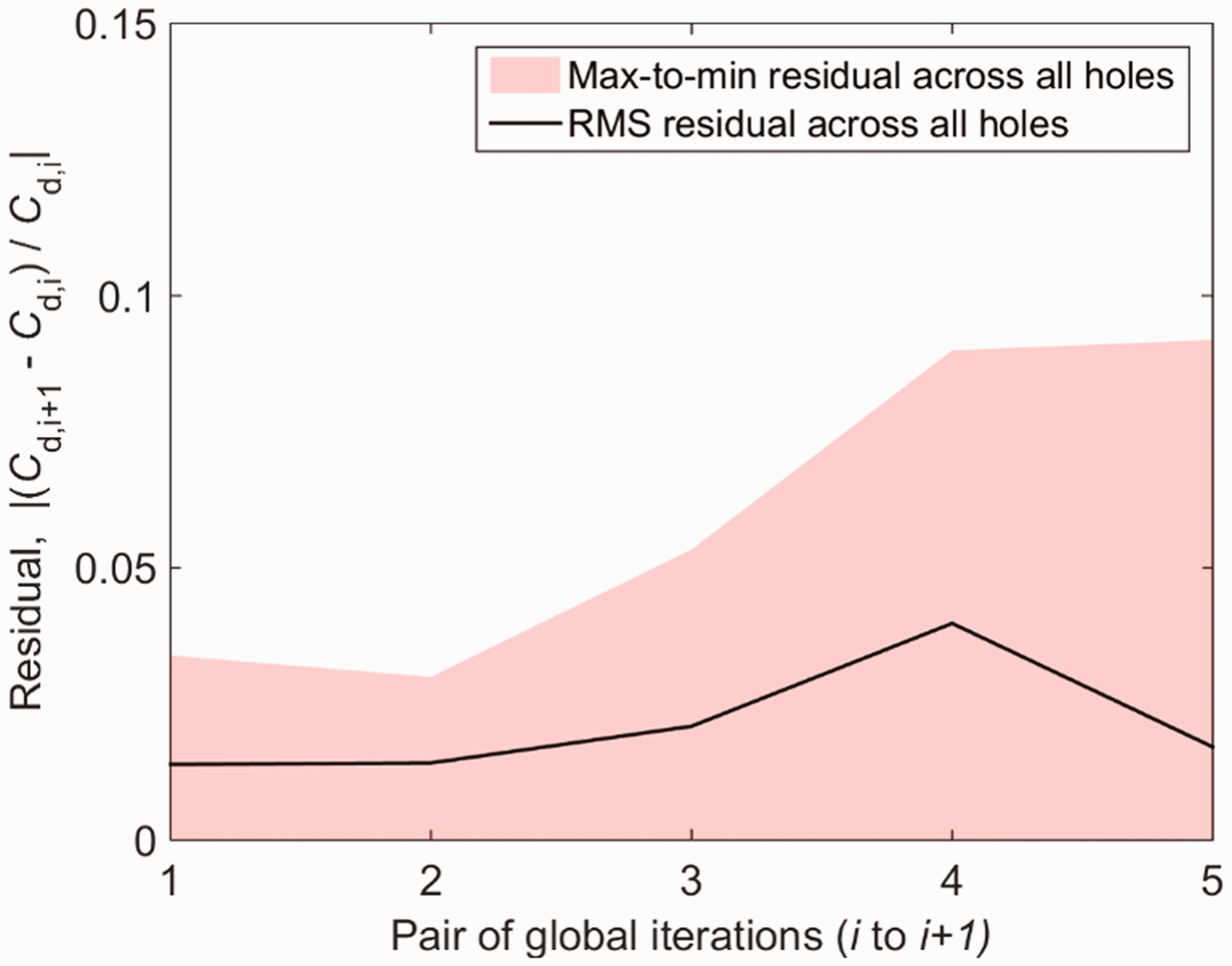
Figure 10 shows the MOGA flow chart for our optimization process. The proxy model is initialized with data from the first CFD run, with the passive scalar values associated with each cooling hole. In our simple example, we consider the value of these scalars at a single downstream line ( Block diagram of the MOGA process (breakdown of the blocks included in the inner loop of Figure 2). Evolution of the Pareto front between successive generations of the MOGA algorithm. Results are normalized by the initial MOGA population. The residual in between the beginning and end of each global iteration, shown as: maximum-to-minimum variation across all holes (red shaded area); and RMS of the residual. RMS: root mean square.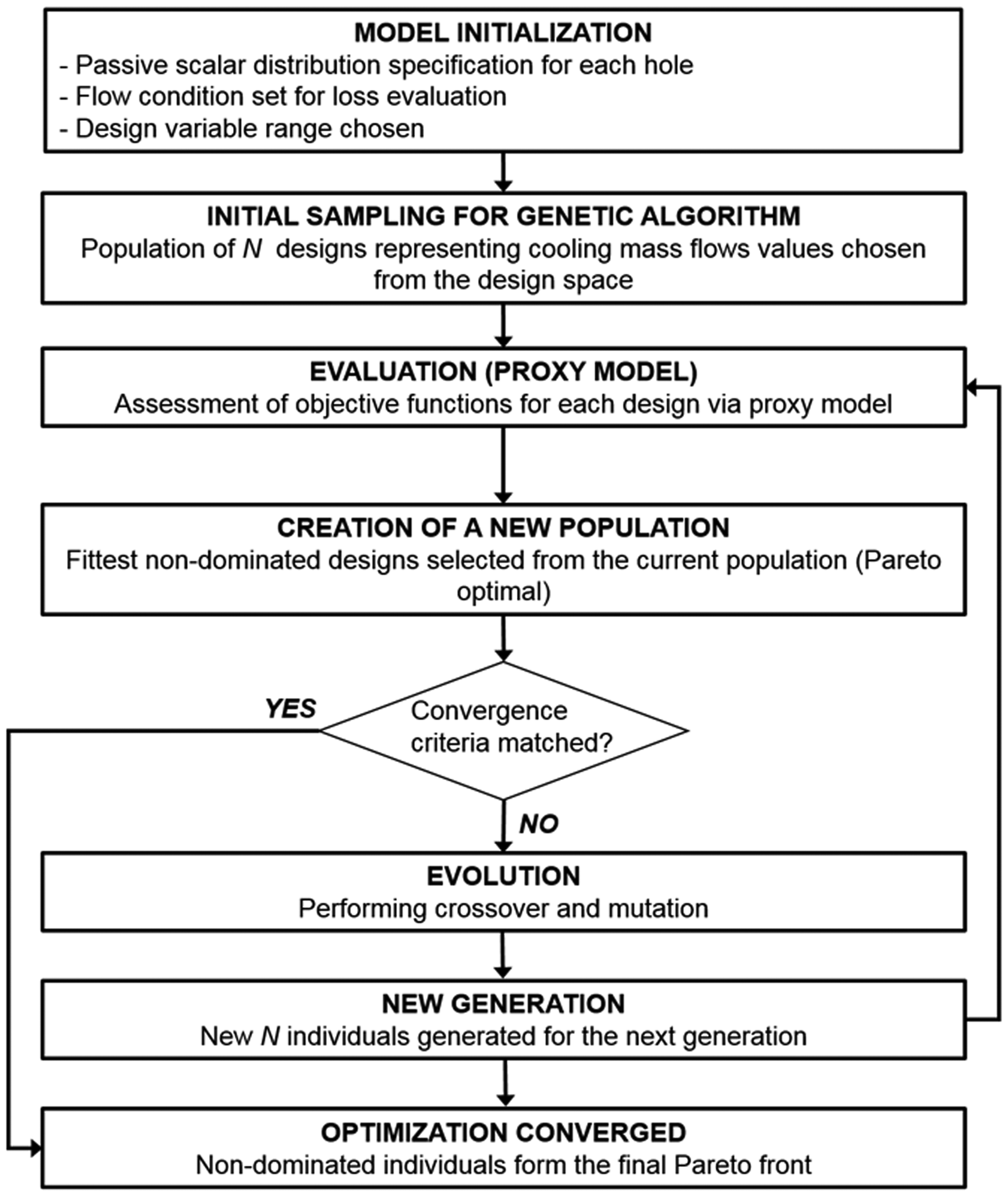
The MOGA decision-making optimization core used the DAKOTA software, which runs in C++, and was linked to the Matlab-implemented proxy model via UNIX shell scripting. We now describe the DAKOTA MOGA in more detail.
The MOGA optimization was controlled with the DAKOTA input file (dakota.in), which contains parameters defining environment, method, model, variables, interface, and responses. These sections of the program are fully defined in Adams et al. 10 The method parameters dictate population size, crossover technique, mutation technique, mutation rate, and convergence criteria. Convergence of the algorithm was typically reached within 3 h for each MOGA run (10 simultaneous evaluations on a 3.40 GHz Linux station). The maximum population size was set to 500 designs. Crossover was performed with shuffle random technique with two parents and crossover rate of 0.8. Mutation occurred by means of the replace uniform technique with a mutation rate of 0.1. The variables were set to be continuous (mass flow rate allowed to vary continuously) but with upper and lower bounds set to 0.8 and 1.2 of the initial value, respectively. These limits are to prevent excessive extrapolations of the MOGA routine, which go too far outside the approximately linear range based on the previous CFD recalibration step. The responses parameters define the objective functions.
Results and discussion
In this section we consider the results of the optimization of the cooling system depicted in Figure 5 with the dual targets of maximizing component life and minimizing loss associated with coolant introduction.
General results
We recall that the life target is based on the somewhat arbitrary adiabatic effectiveness distribution shown in Figure 15, which was chosen so that in the first design, parts of the plate are both undercooled and overcooled. The target effectiveness distribution is hard to interpret in terms of life in isolation, as it would normally form part of a system with an internal cooling arrangement. The objective functions effectively minimize the difference in adiabatic film effectiveness from a target distribution defined at the domain exit line whilst minimizing the total entropy generation (both aerodynamic and thermodynamic) associated with film cooling mixing. The target distribution at the domain exit (
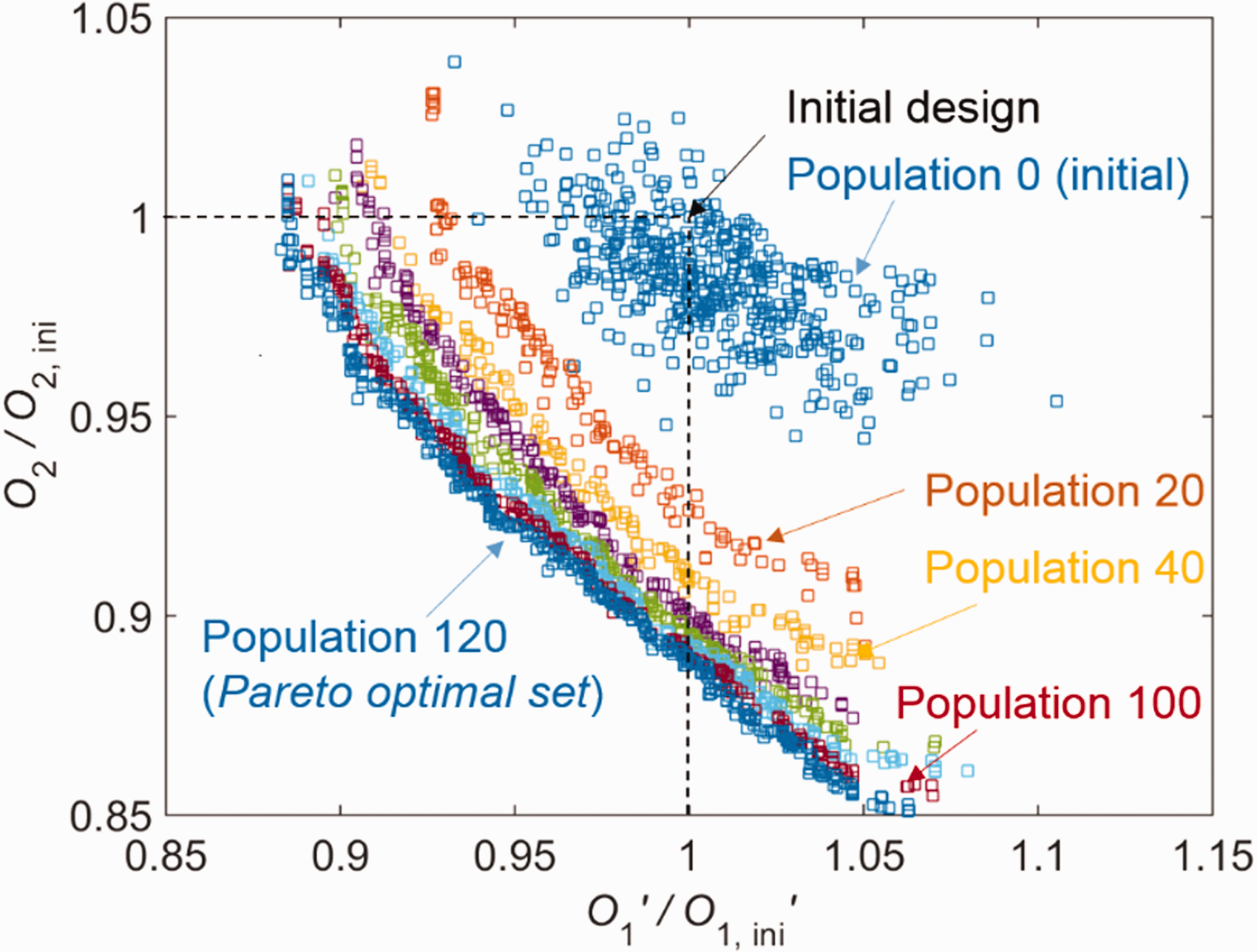
Figure 11 shows an example of the evolution of the Pareto front for a MOGA run, showing snapshots from every 20th population, up to population 120. It can be seen that around population 120, the MOGA process is converged (for this particular case), and there is little development of the Pareto front. As with all multi-objective optimization processes, there is no single ‘best design’ on the Pareto front, and a somewhat arbitrary choice must ultimately be. In the figure we present the data for a typical MOGA run, normalized by the initial values (
The Pareto front converges towards decreasing values of both
In this optimization, we manually selected designs from approximately the centre of the Pareto front. This selection strategy was applied consistently for each MOGA run.
At each stage, the chosen design was passed to the next global iteration: first being passed to the CFD, with the information being passed back to the proxy model by way of recalibration.
During each MOGA loop, the coolant mass flow rates are continuously adjusted using the method described in relation to equation (20). In this equation, the discharge coefficient,
To assess the divergence in mass flow rate (difference between CFD and proxy model) introduced between the beginning and end of an individual global iteration, as a result of assuming constant
We now consider the results of the MOGA optimization process, first considering the film effectiveness (life objective function) and then the entropy rise associated with mixing.
The overall film effectiveness distribution at the end of the optimization process (after six global runs) is shown in Figure 13. In targeting maximum life (against the stepped function expressed by equation (12)) and minimum loss, the optimizer has redistributed coolant forward and to the lower half of the domain (see also Figure 14 and discussion).
Predicted film effectiveness distribution for the final optimized design (after six global iterations). (a) Minimum in life objective function, Comparison of target film effectiveness distribution (solid black line) at domain exit, film effectiveness distribution for the first generation design (dotted black line), and proxy model output (blue line) and CFD recalibration prediction (red line) for the sixth generation design.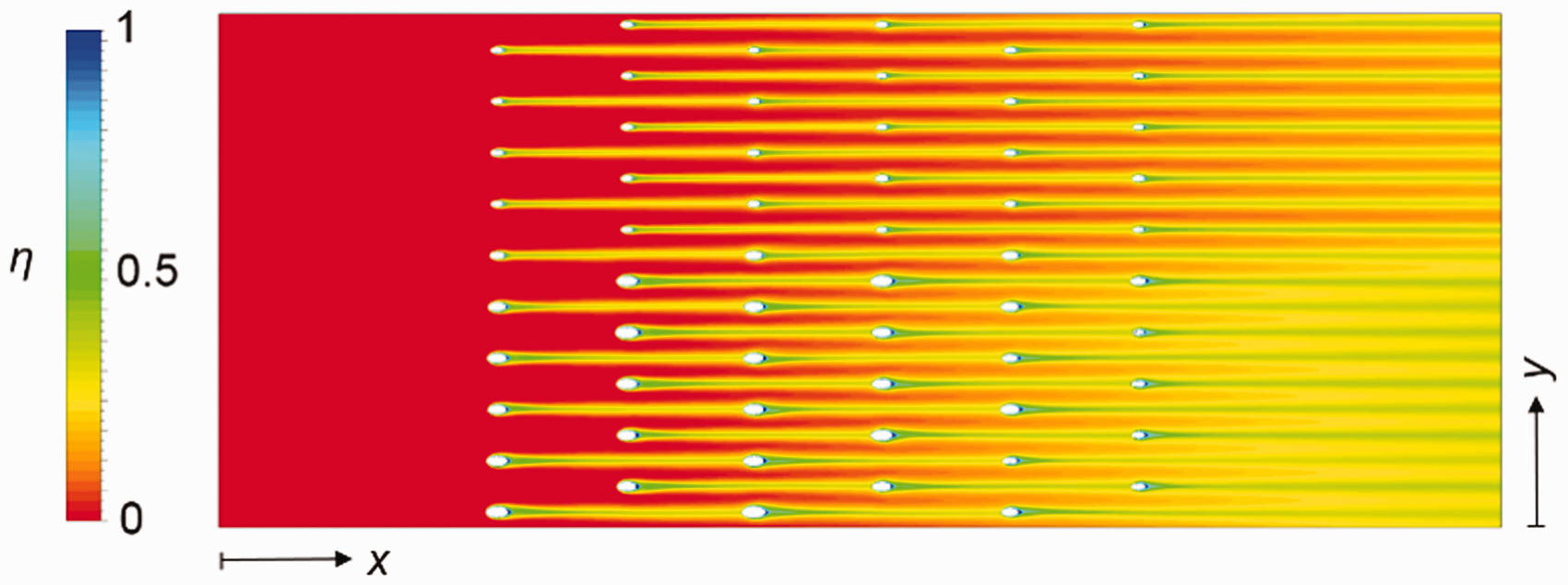
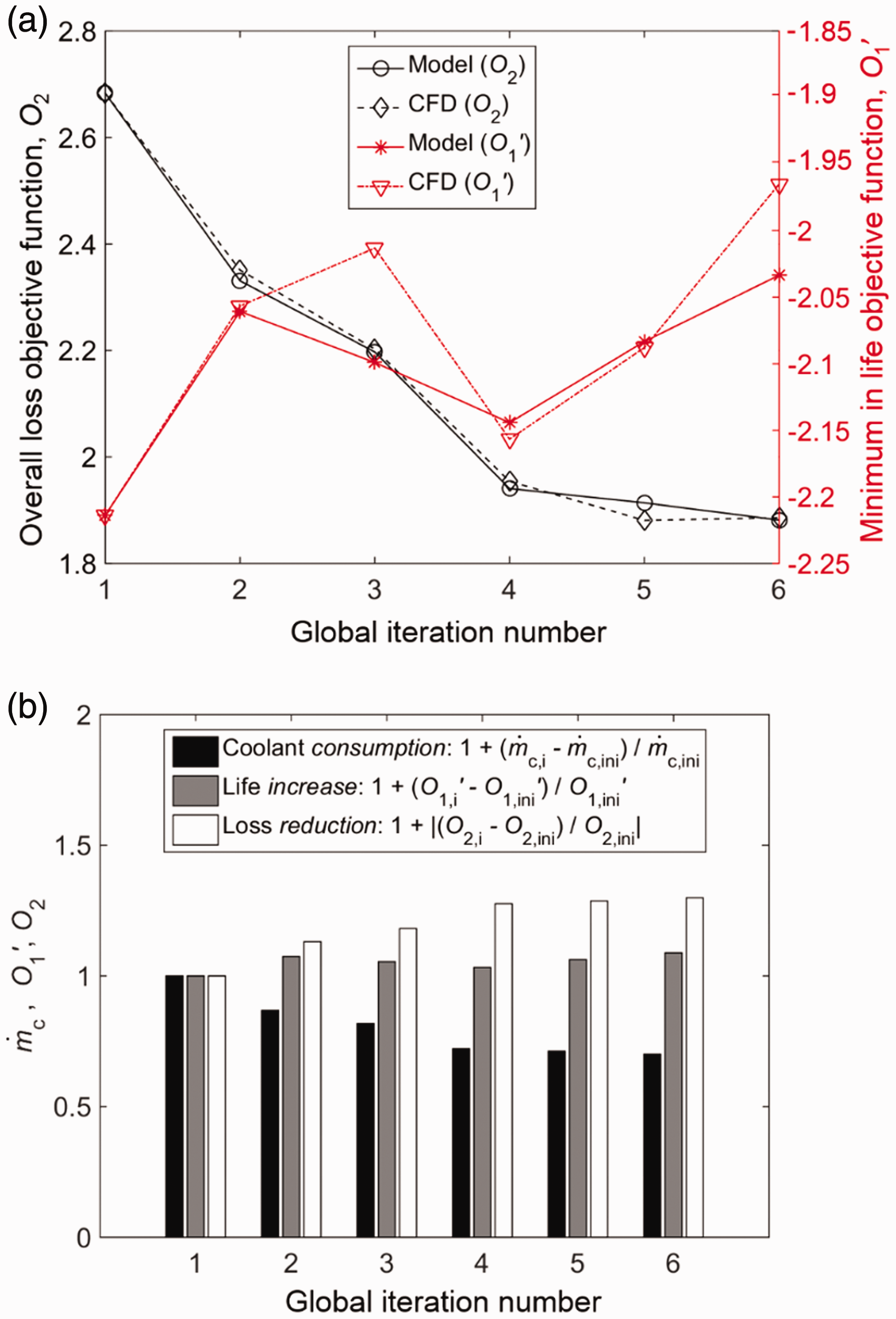
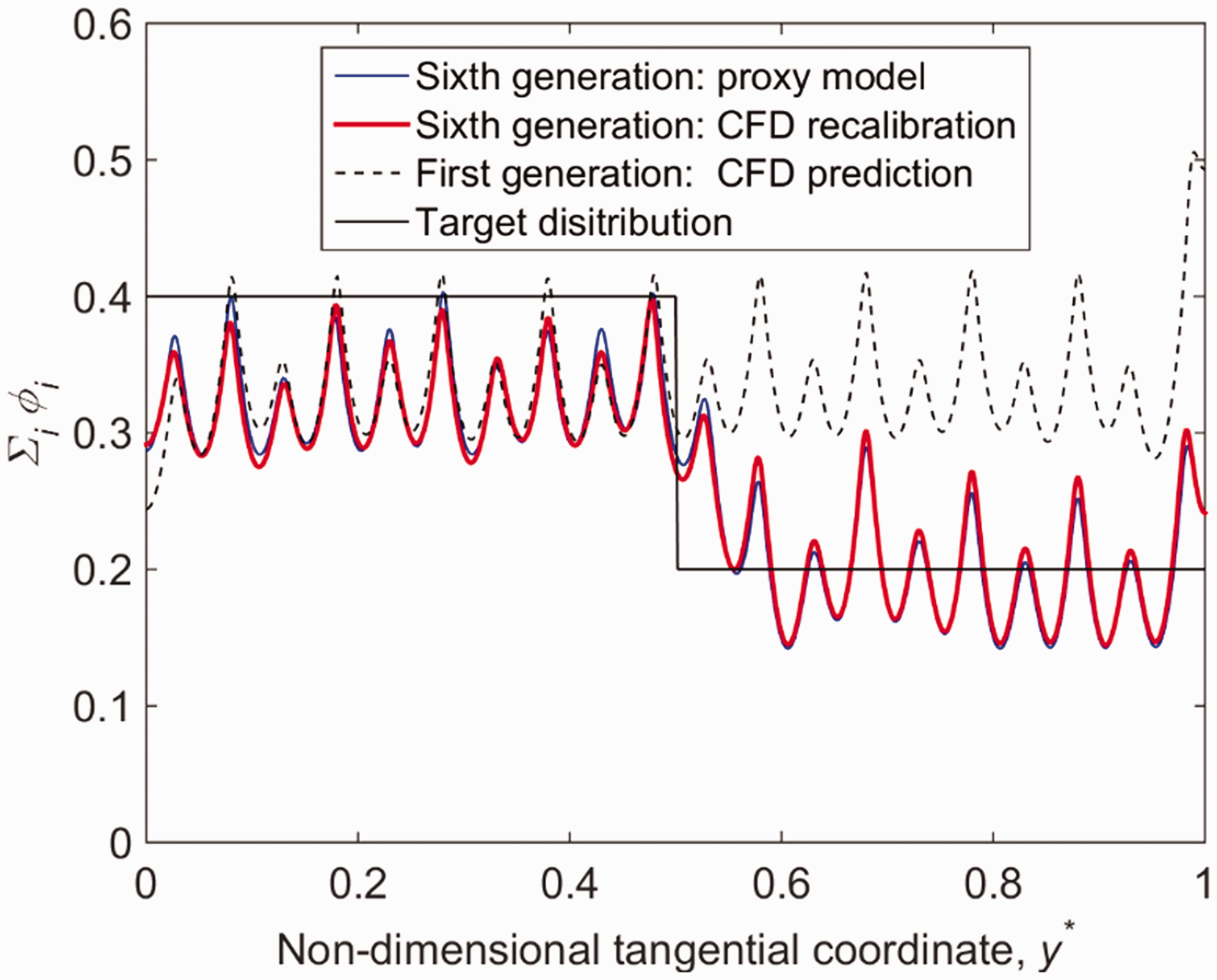
Figure 14(a) presents the evolution of the minimum in the life objective function,
The evolution of
The evolution of
In Figure 14(b) we show the evolution of coolant consumption, life, and loss reduction as a function of the global iteration number. The optimization process was stopped after six global iterations because the improvement in both objective functions between two subsequent global iterations was small (less than 3%) showing a plateau in the optimization. After six global iterations of the optimization process, the minimum in the life objective function,
In summary, the proposed method has achieved convergence to an optimized configuration after only six CFD simulations. This is a reduction in computational cost of several orders of magnitude over standard methods. Both objective functions (
Further discussion of results
We now consider in more detail the evolution of the objective functions during the optimization process.
In Figure 15 we compare the target film effectiveness distribution (solid black line) at the domain exit (
The first generation design (dotted black line) has CFD predicted film effectiveness in the range 0.25
After six global runs (approximately 125,000 MOGA/proxy model solutions, but only six CFD solutions) the difference between the CFD-predicted distribution and the target distribution is substantially reduced. We also see that the MOGA/proxy model estimation is in excellent agreement with the corresponding CFD prediction (comparison of red and blue lines in Figure 15).
We now consider the change between the initial and final cooling configurations when compared to the target profile. In the region
In the region
Figure 16 shows the evolution of Evolution of 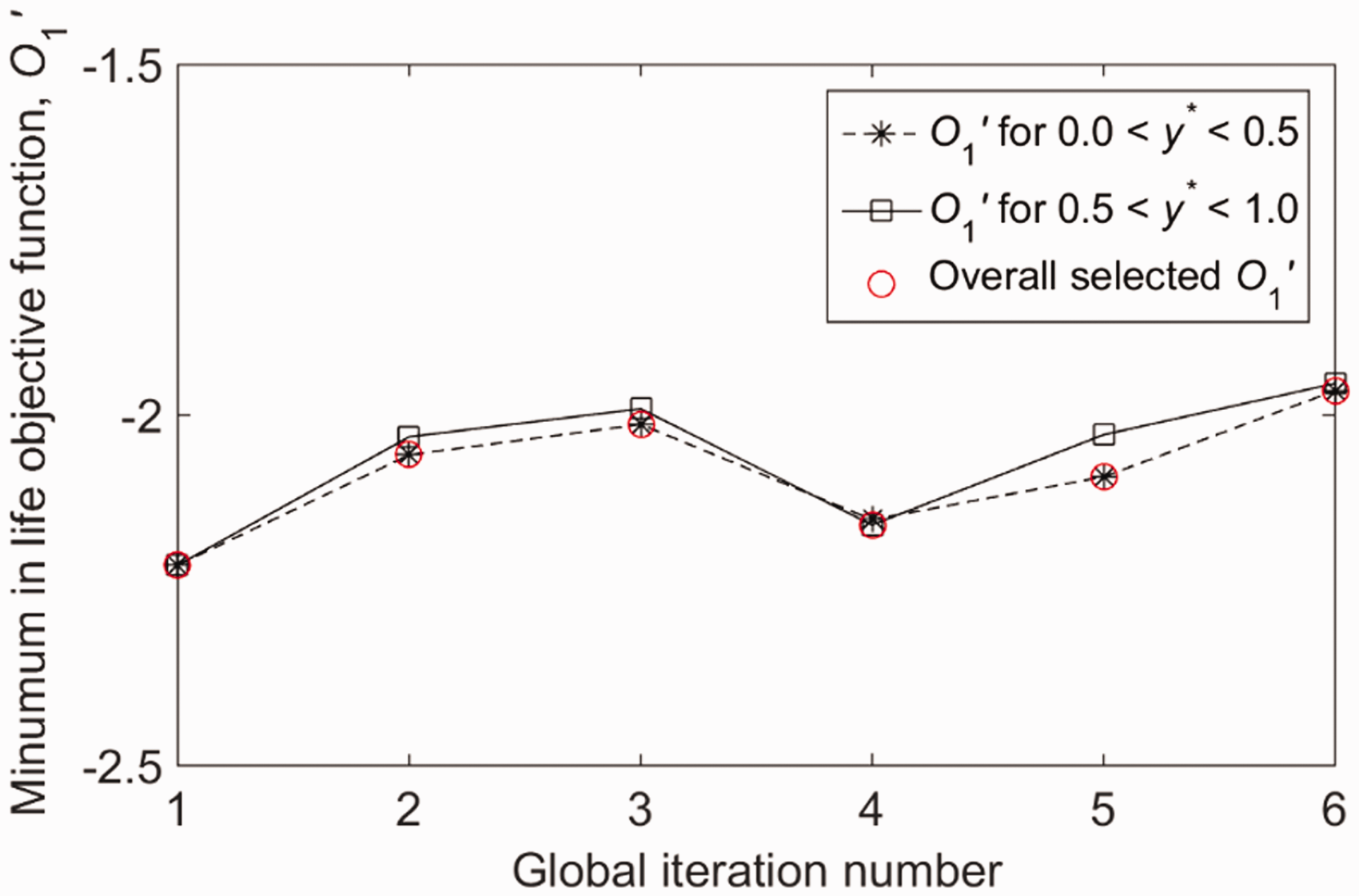
We now consider mixing loss, and compare the first generation and sixth generation designs. The target is to minimize overall loss (as measured by entropy gain).
Figure 17 shows the change in hole diameter for each row (individual figures) for global iterations from the first generation (d = 2 mm) to the sixth generation design. The optimized configuration is characterized by larger diameters for combinations with low row and column number (bottom left quadrant of domain shown in Figures 5 and 13, i.e. 0 < Evolution of hole diameters with global iteration number.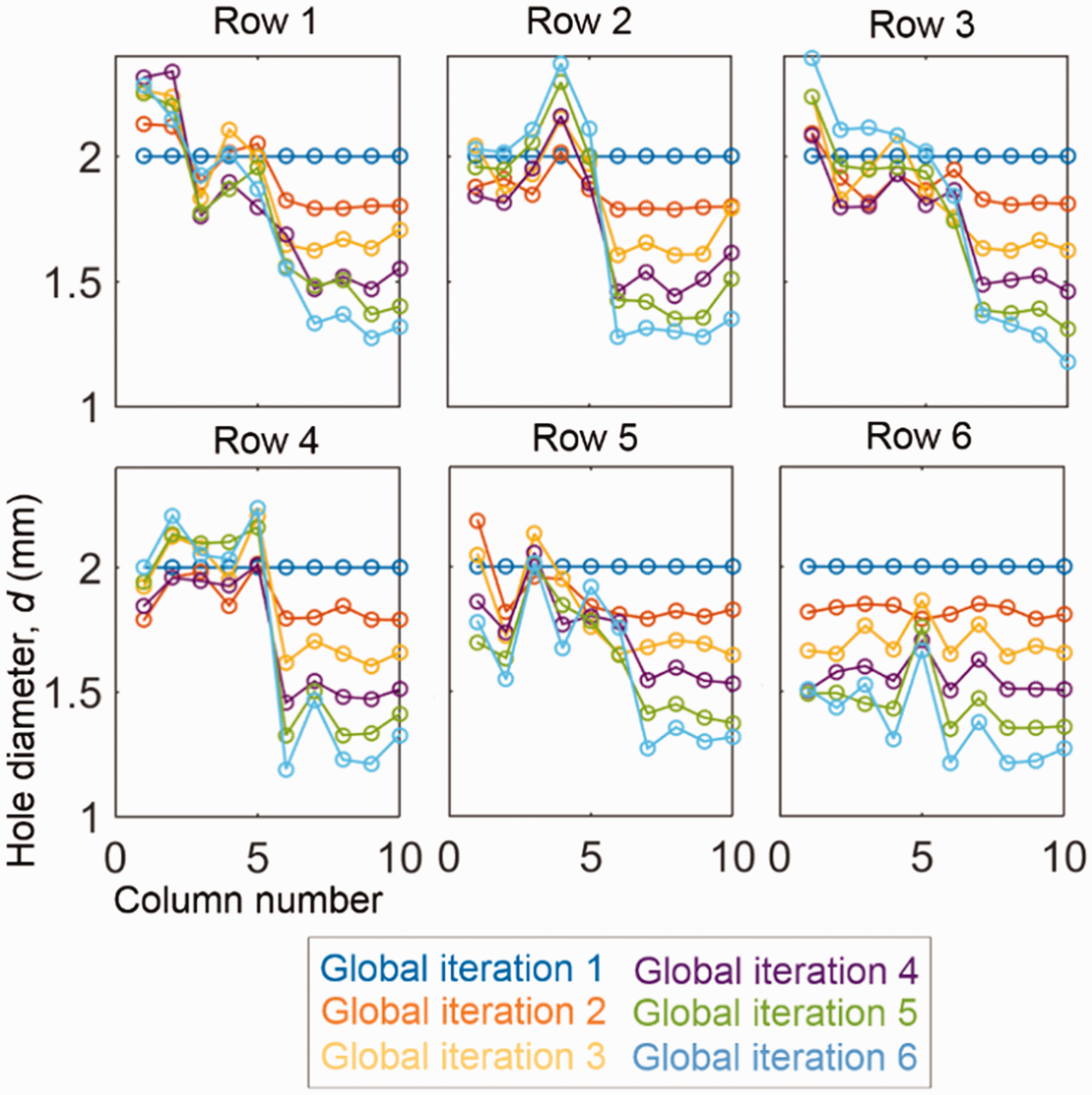
In the final optimized solution, with very few exceptions, hole diameter in a particular row decreases monotonically in the direction of the domain exit. This is because mixing loss is lower in the region of lower external Mach number. Even in this simple scenario, complexity emerges because of the coupled nature of the optimization (film effectiveness and loss).
Figure 18 shows the area distribution for all the holes for the final optimized design (solid bars, after the sixth global iteration) compared to the initial hole areas (transparent bars). Hole areas in columns 5–10 are reduced, this result being driven by the step in the target distribution of equation (12). Likewise the area of the holes belonging to rows 4–6 is reduced because of the higher mixing losses associated with injection of films into a higher Mach number region. In contrast, there is an increase in the hole area in rows 1–4 for columns 1–4.
Comparison of hole areas between the initial case and the final optimized design (after given global iterations).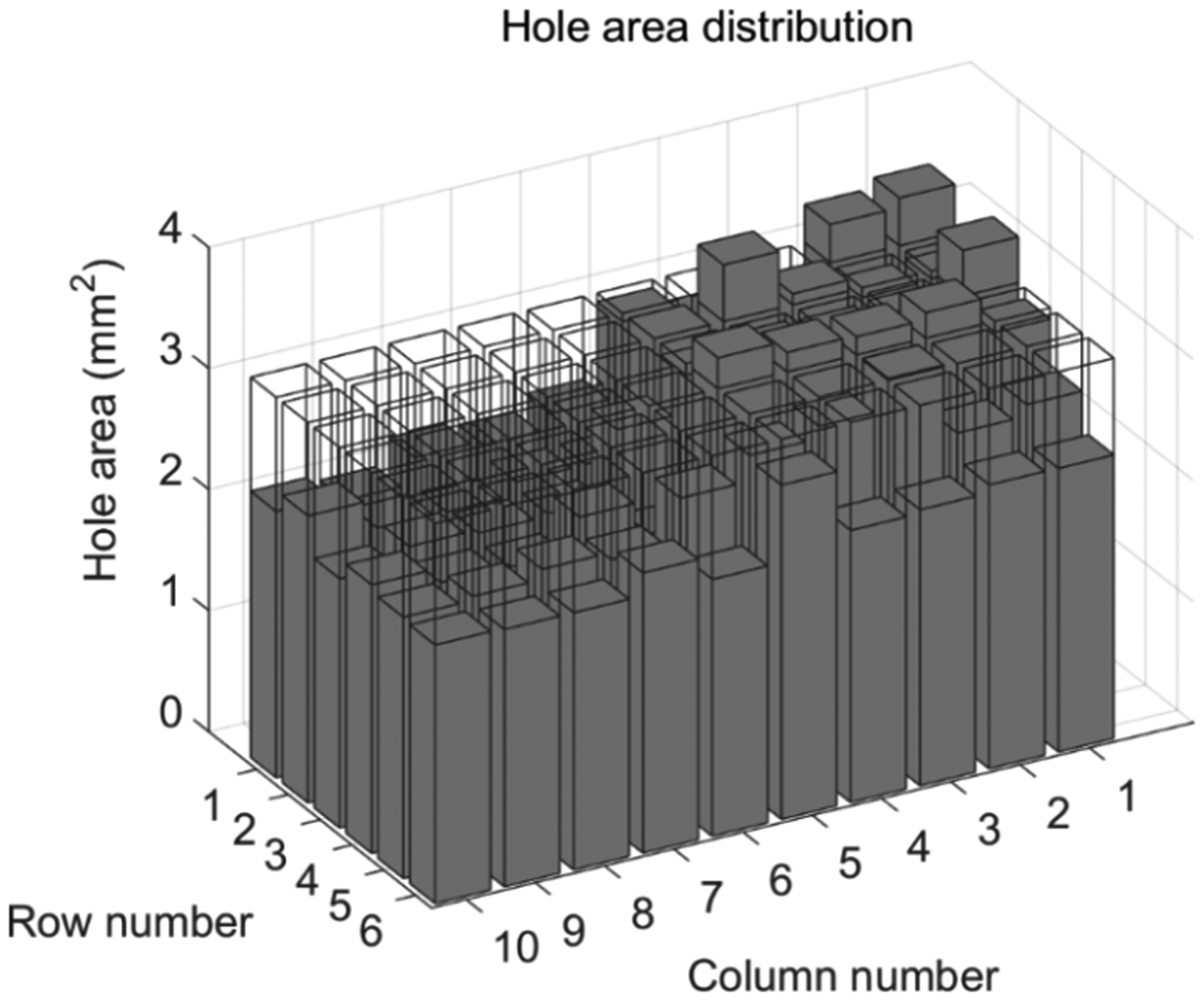
Summary of results and findings
In this paper, we have demonstrated that, with the proposed methodology, convergence of a multi-objective optimization process can be obtained with only six outer-loop iterations (six CFD simulations). This is at least two orders of magnitude less than required with standard optimization techniques and is achieved by supplementing the CFD with a proxy model which runs 10,000 computationally inexpensive inner-loop iterations per outer-loop iteration. Because the proxy model is recalibrated at each outer-loop iteration, and because the final result is validated with the outer-loop iteration, the final solution is as robust as the method used. The outer loop could be high-fidelity CFD or even an experimental technique.
The optimized solution improved on the baseline design as follows: an 11% increase in component life, a 30% reduction in overall mixing loss, and a 30% reduction in mass flow rate. The situation chosen was relatively complex, on account of the multi-objective nature of the optimization.
In the following section, we discuss limitations of the proposed method.
Limitations of the method
We have demonstrated a powerful method for optimization of film cooling systems, which reduces by more than an order of magnitude the number of CFD simulations required, replacing them with a low-order proxy model of the cooling system, seeded with information from an initial CFD simulation and periodically recalibrated against subsequent CFD simulations. Although the method is powerful, it relies on directional stability of the proxy model. By this we mean that the each time and extrapolation is performed by the proxy model, the change from the previous iteration should at least be in the same direction as the change in the higher order model of the system (in this case the CFD simulation, but, equally, we could apply the argument to an experimental system) but ideally also of the same order of magnitude. If the proxy model does not predict at least the correct direction in the change of the objective function between iterations (e.g. it predicts an improvement, but the CFD recalibration step predicts degradation), the model is unstable and convergence cannot be achieved.
In this section we discuss possible limitations of the proxy model, which would limit application of the overall method. The following possible limitations have been identified:
Sudden (with film cooling changes) flow structure changes in the main-flow. It is well-known that bulk momentum flux contribution of a cooling flow can affect the overall flow structure in the near wall region. A well-known example of this is that the film cooling flow on a nozzle guide vane platform can completely change the secondary flow structure in the passage (see, e.g. Thomas and Povey
6
and Ornano and Povey
14
). The effect (with changing film cooling flow) can be so significant that regime shifts are introduced. A regime shift could be as dramatic as the sudden and complete suppressing of a passage-scale secondary flow structure. A similar effect is observed on rotor endwalls with changes in the cavity purge flow.
15
The proxy model discussed in this paper does not model the dynamics of the endwall flow in a way that could capture regime shifts. If applied in environments of this type, it is possible that a local optimum could be found on one side or the other of a regime interface (defined by a particular value of coolant momentum introduction, for example), but it would be impossible for the model to extrapolate (in either direction) meaningfully through the regime change (though a solution might cross a regime by accident). In turbine cooling applications, flow structure changes at particular values of film cooling flow are surprisingly common: in such environments the combined scalar tracking, CFD, and MOGA method must be applied carefully, ideally with prior knowledge of the regimes that exist for a particular application. Sudden local flow structure changes. It is well-known that the local momentum flux ratio (coolant-to-mainstream) affects the local state of the cooling jets (attached or separated, for example) and therefore the local flow structure. This can be quite 3D in nature, with complex interaction between the horseshoe vortex formed by the mainstream and counter-rotating vortex pair issuing from the hole. The coolant-to-mainstream momentum flux ratio affects the coolant trajectory in general (even a long way from the hole), and therefore has a significant bearing on the downstream film effectiveness. In certain environments there can be sudden changes in flow structure (with hole mass flow rate), for example the sudden detaching of a coolant jet at a critical value of coolant-to-mainstream momentum flux ratio. Such effects are not modelled in the simple proxy model used in this paper, and careful consideration needs to be given to the stability of the overall method across local regime changes for individual holes.
Conclusions
In this paper, we have demonstrated a method for significantly accelerating optimization of film cooling systems based on a combined scalar tracking method and MOGA optimization strategy. The method reduces by several orders of magnitude the number of CFD simulations required to achieve a converged solution. An example is discussed in which several tens of thousands of simulations are replaced with six simulations.
In the method, the CFD solution is first used to predict the flow domain for the film cooling system. Scalar tracking is implemented in the CFD to identify the contributions of individual holes to an overall cooling effectiveness distribution (this is done by associating a unique passive scalar variable to the flow associated with each hole and solving an additional scalar transport equation). A proxy model of the CFD solution (simple superposition model, taking scalar values from the CFD solution) is then used to extrapolate to new design points using the MOGA method, targeting improvement against a defined objective function (which might include coolant consumption, life, and loss). The process works as an inner (proxy model) and outer (high-fidelity CFD) convergence loop. The outer loop is used to periodically recalibrate the proxy model in the inner loop to prevent divergence.
We demonstrate that convergence for a complex objective function can typically be achieved with six outer-loop iterations (high-fidelity CFD runs) and 10,000 inner-loop iterations per outer-loop iteration. Our example had an objective function which maximized the component life and minimized the mixing loss introduced by the films. A 30% reduction in mixing loss, a 11% increase in component life, and a 30% reduction in cooling mass flow rate were achieved.
There are some limitations of the proposed method which have been discussed. Particular care needs to be taken when there might be either sudden changes (with changing film cooling flow rate) in the main-flow structure (e.g. suppression or enhancement of a secondary flow) caused by a change in cooling flow or sudden changes in the local flow structures (e.g. jet detachment) caused by the same. In these situations, a simple proxy model would not be able to extrapolate (in either direction) meaningfully through the regime change. This can be mitigated by a user who understands the sensitivities for the part being optimized.
The significant advantage of the proposed method is that for certain optimization problems, the computational cost can be reduced by several orders of magnitude, replacing thousands of high-fidelity CFD runs with approximately six CFD runs. In principle, the technique is applicable to other optimization processes, in which, for example, the high-fidelity CFD simulations are replaced by experiments.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.