
Abstract
3D chain mail assemblies have recently emerged as a promising class of self-transforming structural systems, yet their behaviour at larger scales remains poorly understood. In particular, it is unclear whether geometric outcomes observed in small prototypes persist when the same interlocking assembly is enlarged. This study investigates the multiscale behaviour of a gravity-actuated 3D chain mail curved-beam configuration realised at three geometric scales (1:10, 1:2 and 1:1). Using physical prototyping and 3D scanning, global form is evaluated through span–height outcomes and curvature-profile fitting, while local interaction is characterised through intermodular opening angles as an indicator of how jamming develops along the beam during self-transformation. Results show that, despite increased weight and changes in surface friction with scale, the global curvature profile remains consistently well described by the Catenary model across all scales tested. In contrast, dimensional proportions and intermodular opening angle distributions vary with scale, with greater non-uniformity at full scale. Together, these findings show that robust global curvature can coexist with scale-sensitive local interaction behaviour, highlighting comparative geometric trends and scale-dependent interaction patterns across scales and providing insight into the multiscale behaviour of 3D chain mail beam assemblies.
Keywords
Introduction
Deployable and transformable systems are increasingly explored as a route to adaptable, reconfigurable structures across scales.1,2 Within this landscape, this paper uses the term ‘3D chain mail’ to describe a lattice-based, volumetric, geometrically interlocking modular assembly that combines the flexibility of classical chain mail with the reversible stiffness typical of jamming structures.3 –5 This capability is a self-transformation: the assembly reorganises itself into different configurations through intermodular sliding and contact during actuation, rather than through direct module-to-module repositioning. Prior research suggests that, depending on the length scale and material stiffness, such systems may be developed for a broad range of applications: from small-scale applications, such as wearable medical supports and exoskeletons, to medium-scale reconfigurable pavilions and even large-scale infrastructural deployments, such as bridges. 3
Despite this broad multiscale potential, investigations remain largely small-scale, leaving unclear whether behaviour persists when the same assembly is enlarged. To exploit the multiscale potential of 3D chain mail, addressing this knowledge gap is crucial because scale-related factors such as element size and mass can modify contact and compaction behaviour in jamming systems, producing emergent redistribution within the assembly.6,7 We therefore investigate a single mechanically-actuated 3D chain mail beam, transformed from a flat assembly into a curved beam, systematically realised at three geometric scales (1:10, 1:2 and 1:1). Span–height proportion, curvature profile and intermodular opening angle are used to characterise global form and local interaction in these prototypes, providing insight into the degree of predictability of the multiscale behaviour of the 3D chain mail system and informing development towards larger-scale structural applications.
The remainder of the paper is organised as follows. First, 3D chain mail is defined, and its working mechanism is outlined, followed by a summary of why scale sensitivity matters for this system. Next, the prototype configuration and gravity-based mechanical actuation are described, together with the geometric measures used for comparison across three scales. The results are then reported in global form through span–height and curvature profiles, followed by local interaction through intermodular opening angles. Finally, the findings are interpreted in terms of multiscale predictability and implications for larger-scale applications, before the paper concludes with the main takeaways.
Background
3D chain mail: Definition and working mechanism
Chain mail is commonly understood as a flexible surface composed of repeated interlocking elements, most often rings, traditionally used as armour. Recent advances in digital design and fabrication have renewed interest in chain mail, with studies replacing relatively simple, flat ring elements with more complex, volumetric module geometries while retaining repetitive, lattice-like assembly logics.3 –5,8 –10 This shift produces assemblies that preserve the flexibility characteristic of classical chain mail while enabling reversible stiffness, which in turn supports greater structural capacity and load-bearing potential.3 –5 Prior mechanics-oriented studies on pressure-confined interlocking fabrics have shown how boundary pressure can trigger jamming and sharply increase apparent bending modulus through contact formation between particles.3,4 More recent work has extended this discussion to impact response under confinement in variable-stiffness chain mail fabrics. 5 This paper uses the term three-dimensional (3D) chain mail to describe such systems: a geometrically interlocking modular assembly constructed from volumetric skeletal modules arranged in a repetitive lattice. In this context, ‘3D’ refers to the volumetric proportion of the modules and the resulting assembly, rather than mathematical dimensionality.
The structural behaviour of 3D chain mail emerges from interactions between volumetric modules within a geometrically interlocked assembly. Each module is constrained by neighbouring elements, while the skeletal nature of the modules introduces internal clearances that permit limited relative motion. During actuation, this combination of constraint and clearance enables modules to translate and rotate within a bounded range, sliding before forming new intermodular contact interfaces. These contacts then propagate further module translation, rotation, sliding and intermodular contact formation across the assembly. As these contacts accumulate, relative motion becomes progressively restricted, leading to localised jamming and the emergence of reversible structural stiffness. Crucially, this mechanism allows the assembly to reorganise itself during actuation, enabling a single configuration to self-transform into multiple distinct forms through variations in actuation, without direct module-level intervention such as module-by-module repositioning. Here, jamming denotes the reversible stiffening that occurs as intermodular contact and friction progressively limit the relative module motions.3 –5
Figure 1 provides a preview of the 3D chain mail system examined in this study, showing identical beam-like prototypes in two different scales. Figure 2 illustrates intermodular contact conditions, while Figure 3 exemplifies a range of jammed configurations generated through gravity-based mechanical actuation on a 3D chain mail beam.

An example of 3D chain mail beam prototypes at two different scales.
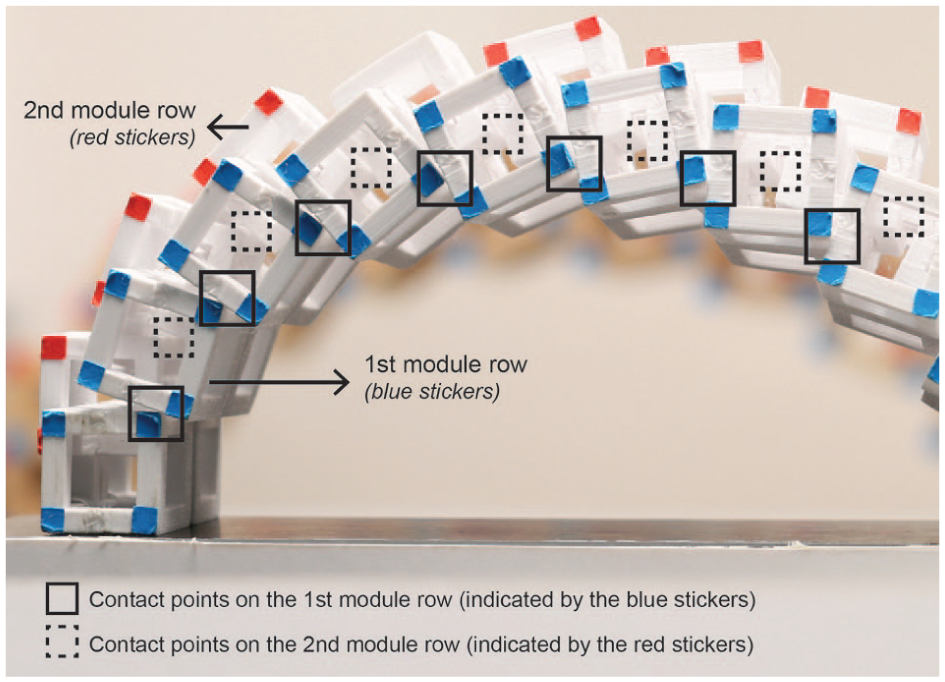
A zoomed-in section of a 3D chain mail beam reveals many contacts between the modules. Image reproduced from Afif et al. 11 Licensed under CC BY 4.0 (http://creativecommons.org/licenses/by/4.0/).

Various curved beam configurations that were reversibly constructed from the same planar 3D chain mail structure. Image reproduced from Afif et al. 11 Licensed under CC BY 4.0 (http://creativecommons.org/licenses/by/4.0/).
Scale sensitivity in 3D chain mail
The mechanism described in the previous section shows that the structural behaviour of 3D chain mail is governed by how intermodular contacts accumulate and progressively restrict relative motion during actuation, allowing the initially flexible assembly to self-transform into a stiffened, jammed state. Because contact formation is sensitive to self-weight and surface friction, both of which vary with changes in module dimensions and mass, scale is therefore expected to influence 3D chain mail structural behaviour. Related experimental work on jammed granular assemblies shows that changes in element size and mass can modify compaction behaviour and produce emergent redistribution of elements within the jammed system.6,7 More broadly, scaling physical prototypes can introduce additional changes in structural outcomes arising from scale-dependent material responses 12 and fabrication- and construction-related deviations.13,14 As a result, the structural behaviour observed in small-scale, self-transforming 3D chain mail assemblies may not translate predictably when the same configuration is realised at larger dimensions; moreover, when changes in materiality follow.
At the same time, existing 3D chain mail studies have explored diverse module geometries and contact-inducement actuation strategies, including magnetically actuated cubic modules, 8 gravity-based, mechanically actuated cubic modules,15,16 and confinement-based actuation of re-entrant, octahedral and hybrid modules.3 –5,10,17,18 However, these studies remain predominantly small-scale, with reported module dimensions typically in the range of approximately 410 mm (defined variously by edge length, diameter or thickness), leaving a limited understanding of whether, and how, contact-driven behaviour persists when an identical assembly is realised and actuated to self-transform at larger dimensions. To address this gap, this study implements a multiscale experiment that realises a single 3D chain mail beam configuration at three geometric scales, actuates each using the same procedure, and evaluates how key geometric measures describing their self-transformation vary with scale. The following section details the experimental method.
Method
Research approach
This study adopts an exploratory physical prototyping approach to examine how the structural behaviour of a 3D chain mail system changes across three geometric scales (1:10, 1:2 and 1:1). Because global structural outcomes in this system are not prescribed solely by geometry but emerge from contact-driven interactions during actuation, scaling across dimensions and materials can significantly influence the post-actuation configuration of the assembly. Such scaling introduces coupled effects, including increased self-weight and material-dependent surface friction, which affect how intermodular contacts form and accumulate. These accumulated contact events govern the transformation of the assembly, making resulting configurations difficult to predict and control across scales and, consequently, difficult to simulate reliably using analytical or numerical models alone at this stage. Physical prototyping, therefore, provides a direct basis for comparing multiscale outcomes under controlled module geometry, lattice topology and actuation procedure.
Prototype configuration and actuation
The study builds on a 3D chain mail system developed in previous work. 11 The system employs hollow skeletal cubic modules assembled in a lattice configuration. A single beam configuration was investigated across the three geometric scales, with each prototype transformed from an initially flat strip-like assembly into a single-curved beam through gravity-based mechanical actuation under self-weight (Figure 4).

Beam prototypes at three geometric scales: from left to right, 1:10, 1:2 and 1:1.
To investigate the influence of scaling, module geometry, lattice topology and the actuation procedure were held constant across all prototypes, while absolute dimensions increased proportionally. Realising the prototypes at the three scales necessitates variations in the material system. Namely, the requirement to switch from 3D printing the 1:10 scale prototype using polylactic acid (PLA) filament, to timber fabricating the 1:2 and 1:1 scale prototypes using structural-grade pine. Victorian ash hardwood was used selectively for a small number of actuation-critical modules at full scale to provide additional strength. With it, we note changes in surface friction and achievable fabrication tolerances. These changes follow necessary practical fabrication and material requirements discussed in prior work 11 and are acknowledged as inherent to scaling rather than treated as parameters under investigation in this study. Figure 5 illustrates the module geometry, lattice arrangement and module counts used in the study.

Module geometry, lattice configuration and module counts used across the prototypes. Image adapted from Afif et al. 11 Licensed under CC BY 4.0 (http://creativecommons.org/licenses/by/4.0/); annotation updated.
The initially flat, strip-like assemblies were mechanically actuated at one end to form self-supporting single-curved beams. See Figure 4 for illustration. Actuation was initiated by rotating two adjacent modules at one end of the beam by 90° about the longitudinal axis and securing them to a rigid horizontal support. The remainder of the assembly was then released to self-transform and allowed to settle under gravity, without manual module-by-module repositioning or corrective intervention. The support surface provided a fixed reference plane and vertical constraint throughout actuation. Unlike pressure-based confinement approaches commonly used in small-scale studies,3 –5,10,17,18 this procedure relies on interactions between geometry, self-weight, boundary support and gravity, reflecting practical boundary conditions relevant to architectural-scale deployment.
Data acquisition and processing
Following actuation, geometric data were acquired from each prototype to enable quantitative comparison across scales. All measurements were conducted after the structures had actuated under self-weight. The prototypes were actuated multiple times during the digitisation method development; nonetheless, repeatability across actuations was not analysed quantitatively in this paper. The 1:10 scale prototype was digitised using structured-light 3D scanning (Artec Space Spider), while the 1:2 and 1:1 scale prototypes were documented using photogrammetry through a mobile-based workflow (Polycam). Meshes generated from both processes were imported into a common digital coordinate system via a modelling environment (Rhinoceros 3D). The rigid support surface employed during actuation defined the horizontal reference plane (XY), while the vertical plane of the actuated module defined the vertical reference plane (XZ).
The three-dimensional meshes were processed into two-dimensional sectional representations capturing the longitudinal profile of each beam. Section-based point extraction was performed in Grasshopper for Rhinoceros 3D. Longitudinal sections were generated at regular intervals along the beam length (X-axis), and for each section, points corresponding to the uppermost module row were identified based on maximum vertical (Z-axis) coordinates. To obtain a representative longitudinal profile, a single transverse cutting plane located at the mid-width of the beam (Y-axis) was selected. The extracted uppermost points were then projected onto this central plane, producing a single set of point coordinates along the beam length. These projected points were connected sequentially to reconstruct the beam’s longitudinal sectional outline as a polyline, which was subsequently treated as a curve for analysis. This procedure ensured repeatable and comparable extraction of the longitudinal beam profile across all prototypes and scales. Figure 6 illustrates this workflow.
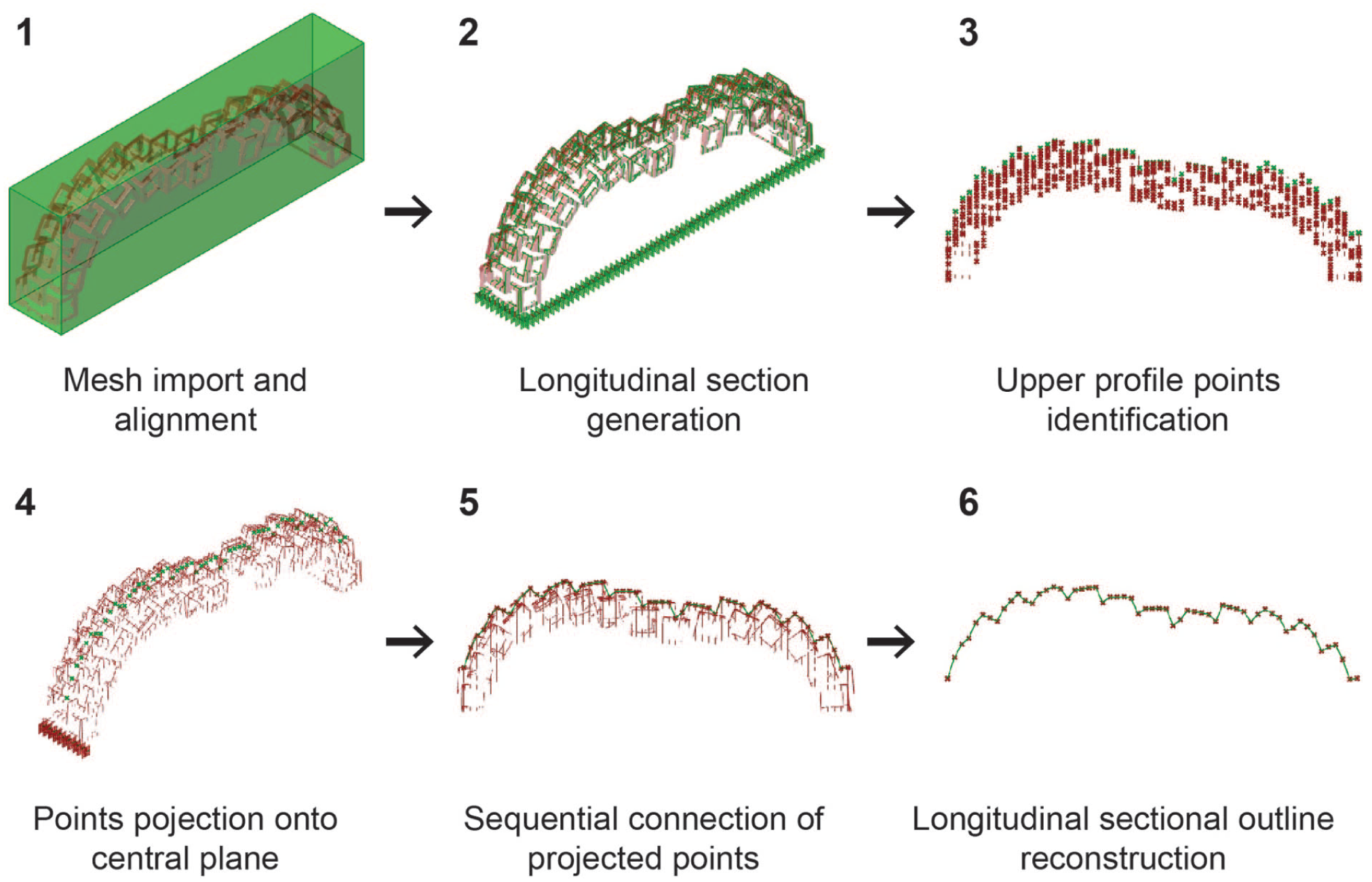
Workflow for extracting the longitudinal beam profile from a scanned 3D chain mail prototype, applied to sample beam data.
Geometric measures
Using the extracted longitudinal sectional data, three geometric measures were computed: global dimensions (span and height), curvature profile and intermodular opening angles.
Span was defined as the horizontal distance between the first and last actuated modules (i.e. span measures only the curved portion of the assembly; Figure 4 shows that the number of actuated modules can vary across scales), while height was defined as the maximum vertical displacement relative to the horizontal (XY) reference plane. Both values were extracted from the longitudinal sectional profile. Within each prototype, the relationship between span and height was additionally expressed as a span-to-height ratio. Together, these measures served as the first characterisation of the curved beams’ global form.
Curvature profiles provide the second measure of global form to be compared. They were analysed by fitting mathematical curve models to the extracted sectional point coordinates in MATLAB. Because no single governing curve type was assumed a priori, multiple candidate curvature models were tested (including polynomial, exponential, sinusoidal, Fourier series and funicular curves) to compare curvature consistency and deviation across scales. Models were screened using a combination of graphical agreement with the measured profile and the coefficient of determination (R²), which provides a scale-independent goodness-of-fit metric for comparing beams of different sizes. Where multiple orders within a curve family produced comparable fits, the lowest-order model was selected to minimise overfitting.
Finally, intermodular opening angles provide a localised measure of how module interactions develop within the assembly as it self-transforms from an initially flat configuration into a curved, actuated state. Angular openings between neighbouring modules were extracted along the longitudinal sectional profile. Within each prototype, variations in these angles along the beam length are the basis for capturing how module sliding and rotation progressively evolve during actuation. Smaller openings correspond to reduced relative motion between modules caused by increased contact accumulation between modules. Larger openings correspond to greater sliding and rotation capacity between modules. Comparisons across scales, therefore, indicate how the extent of jamming differs with geometric scale, under the influence of associated changes in self-weight and surface friction.
Figure 7 illustrates the application of these geometric measures.
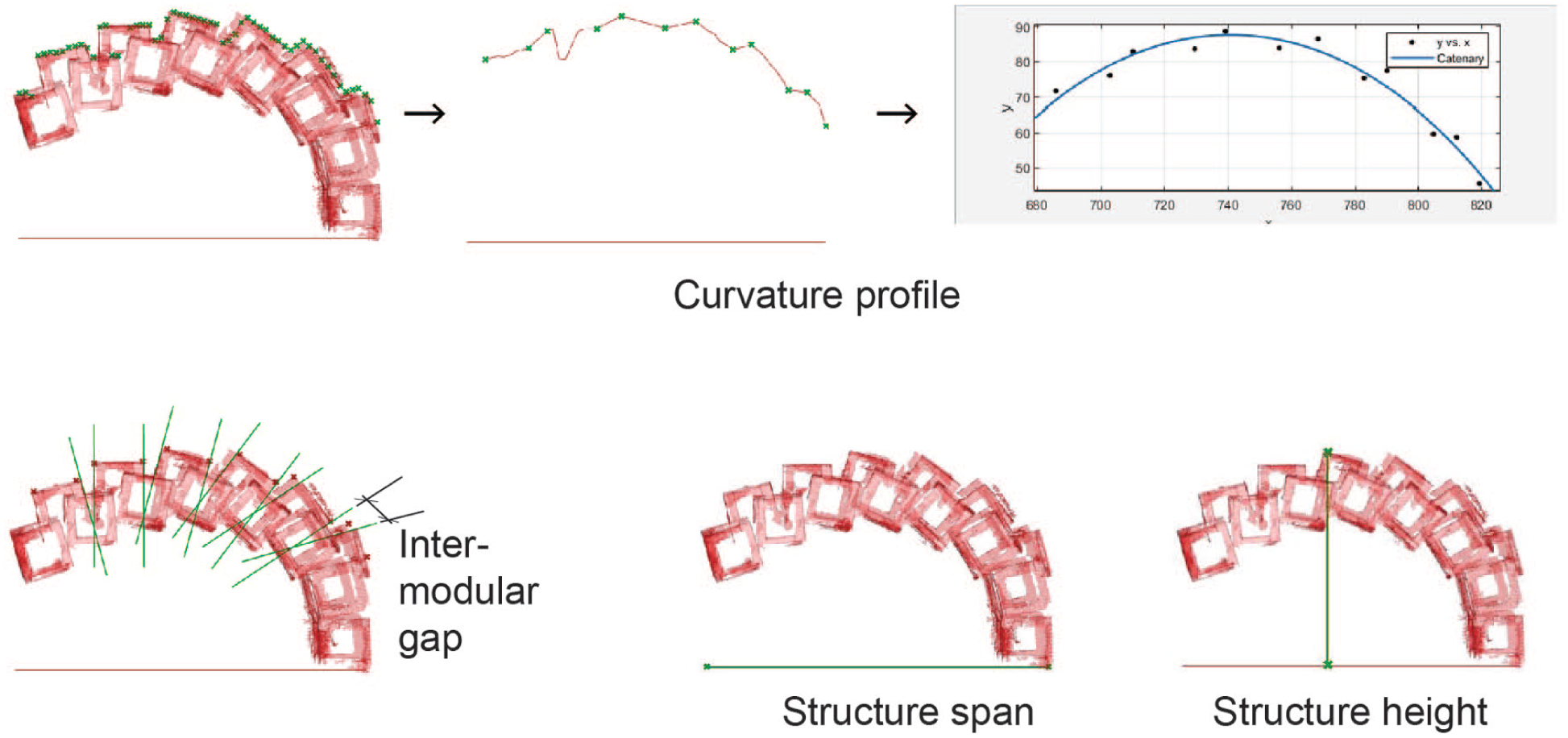
Illustration of geometric measures extracted from a 3D chain mail beam assembly, applied to a sample of beam data: curvature profile (top row), intermodular gaps and structure span and height (bottom row).
Results
This section reports the resulting geometry of a mechanically actuated 3D chain mail curved-beam configuration realised at three geometric scales (1:10, 1:2 and 1:1). Results first describe global form through span, height and curvature profiles of the self-transformed beams, followed by local interaction described using intermodular opening angles.
Global form measures
Global dimensions (span and height)
Table 1 reports measured span and height together with the span-to-height ratio for each scale, and Table 2 reports deviations relative to values obtained by proportionally scaling the 1:10 measurements.
Measured span and height of the actuated curved-beam prototypes at three geometric scales (1:10, 1:2 and 1:1), with the derived span-to-height ratio.

Span and height deviations relative to values obtained by proportionally scaling the 1:10 measurements across scale transitions.
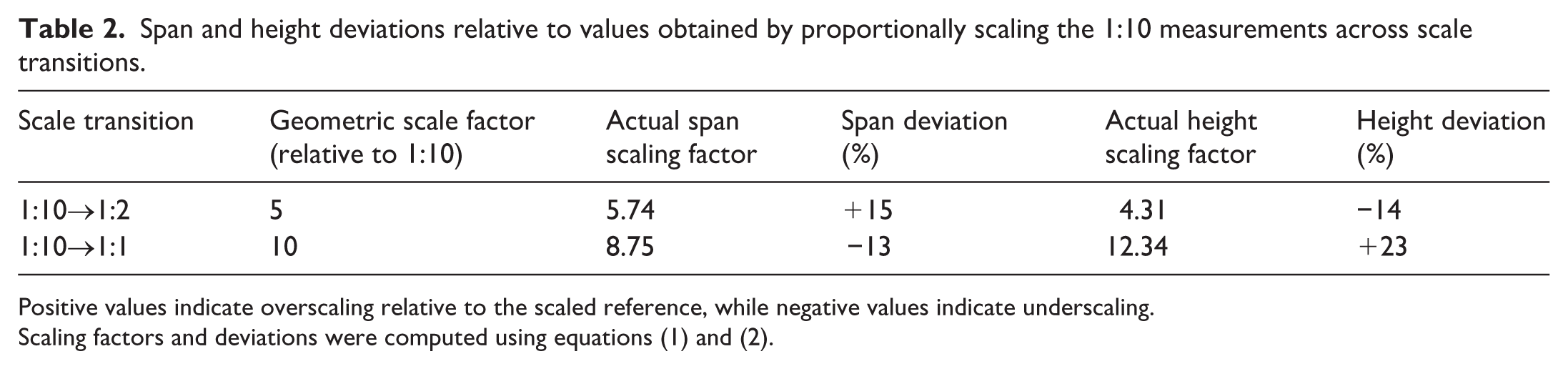
Positive values indicate overscaling relative to the scaled reference, while negative values indicate underscaling.
Scaling factors and deviations were computed using equations (1) and (2).
For a given geometric dimension


At 1:2, span is over-scaled relative to the proportionally scaled value (+15%), whereas height is under-scaled (−14%), resulting in a flatter overall proportion of the curved beam (higher span-to-height ratio). At 1:1, the trend reverses: span is under-scaled (−13%), and height is over-scaled (+23%) relative to the proportionally scaled value, producing a steeper overall proportion (lower span-to-height ratio). This trend is also apparent in Figure 4, where the 1:10 and 1:2 beams appear visually similar, although the 1:2 prototype is slightly flatter, while the 1:1 beam exhibits a noticeably more pronounced rise. To assess whether these proportional shifts correspond to differences in curvature profile (rather than only changes in global span and height), the longitudinal profiles were next evaluated through curve fitting.
Curvature profile
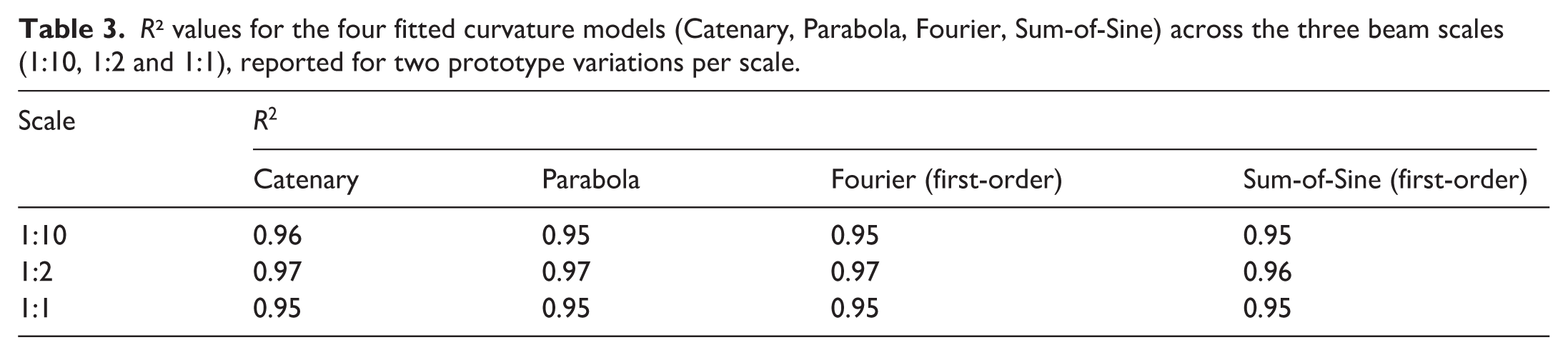
From the initial set of candidate model families tested, only those demonstrating a strong graphical fit were retained for reporting. A strong graphical fit was defined as fitted curves that visually followed the overall trend of the measured profiles. The retained models were the Catenary, Parabola, first-order Fourier and first-order sum-of-sines models. Curve fitting data (see Table 3) shows consistently high agreement between the measured longitudinal profiles and these curve families across the three scales, with R² values typically above 0.95 (Table 3). Across scales, the Catenary model achieved the highest R² values, although differences relative to the other reported families were marginal (Table 3). Figure 8 illustrates representative fits for the three beams, showing close agreement between the measured sectional profiles and the reported models.
R² values for the four fitted curvature models (Catenary, Parabola, Fourier, Sum-of-Sine) across the three beam scales (1:10, 1:2 and 1:1), reported for two prototype variations per scale.
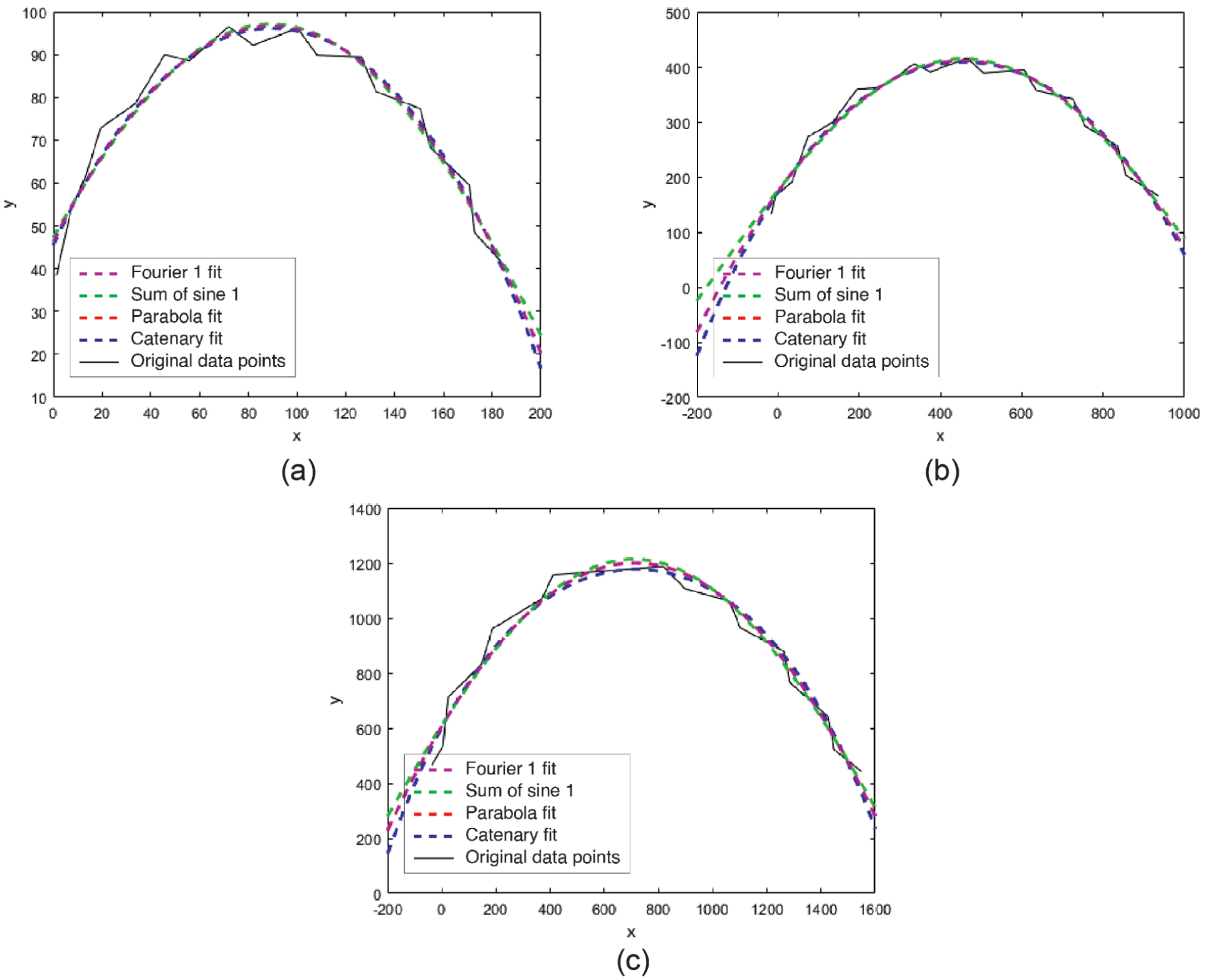
Curve-fitting result for the three beams: (a) 1:10, (b) 1:2 and (c) 1:1 scale.
Local interaction measure
Intermodular opening angles characterise how local module interactions evolve during self-transformation across scales. Intermodular opening angles show increasing variability with scale, indicating greater differences in how local interactions develop during self-transformation. Relative to the 1:10 baseline, the 1:2 prototype exhibits mostly modest segment-by-segment differences, with five of the eight comparable segments showing angular differences of less than 5°. Larger deviations (>5°) occur near the actuation initiation end (M1–M2 and M2–M3) and near the terminal end within the common segment set (M8–M9). By contrast, the 1:10 versus 1:1 comparison reveals larger deviations across multiple segments: five of the eight segments exceed 5°, and pronounced differences extend into the apex region (approximately M4–M5 and M5–M6).
Table 4 reports intermodular opening angles for all three scales together with angular differences for the 1:2 and 1:1 prototypes relative to the 1:10 baseline. Differences exceeding 5° are shown in bold to highlight segments with more pronounced variability.
Intermodular gap angle values for the curved beam structures across the three scales.
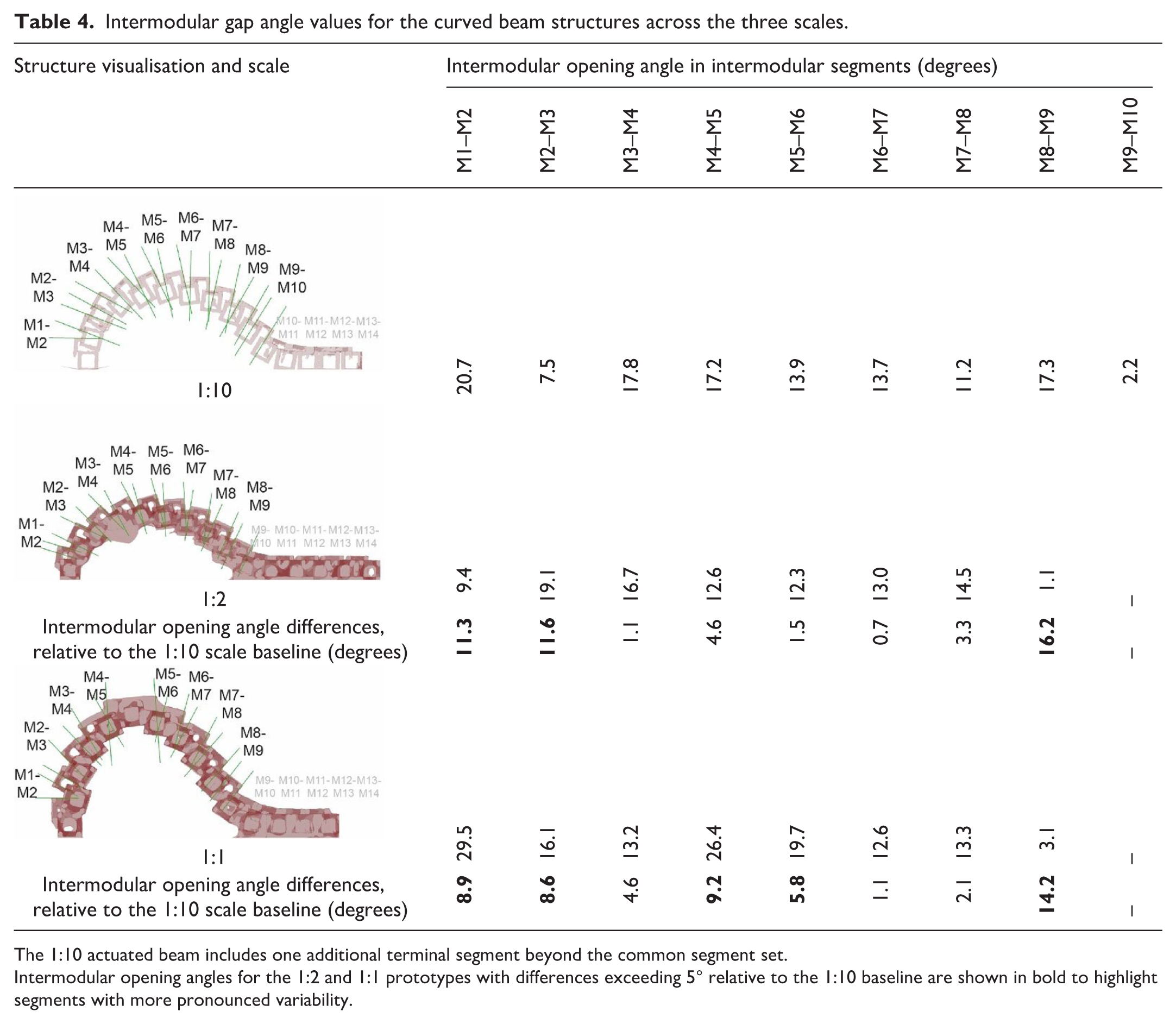
The 1:10 actuated beam includes one additional terminal segment beyond the common segment set.
Intermodular opening angles for the 1:2 and 1:1 prototypes with differences exceeding 5° relative to the 1:10 baseline are shown in bold to highlight segments with more pronounced variability.
Discussion
Global form across scales
The global form results indicate two complementary effects of scaling in the mechanically actuated 3D chain mail beams. First, scaling affects the realised global dimensions of the actuated beams: based on span–height measurements, the 1:2 beam self-transformed into a slightly flatter proportion than the 1:10 baseline, whereas the 1:1 beam self-transformed into a noticeably steeper proportion, consistent with the pronounced rise observed in Figure 4. Second, despite these proportional shifts, the curvature profile remains consistently well described by the reported curve models, with Catenary providing the most mechanically appropriate descriptor for the present self-weight-driven actuation condition. Together, these measures indicate that, even when module geometry, lattice topology and actuation procedure are held constant, the self-transformed beams do not follow proportional scaling linearly in span and height; yet the resulting forms retain a consistent global curvature associated with gravity and self-weight.
Within the curve fitting, while several models provide comparably high goodness-of-fit, similarity in R² values alone does not imply equivalence in structural interpretation. The relevance of the fitted curves must therefore be assessed against the mechanics governing curvature formation in the tested assemblies. Here, the Catenary best aligns with the experimental condition: it describes the equilibrium form of a self-weight-driven assembly under gravity, in which the final geometry emerges from the interaction between self-weight and boundary constraints. 19 This closely matches the actuation employed in the experiments, where the beams self-transform under their own weight following the introduction of geometric instability and interaction with the support surface, which maintained a consistent constraint throughout actuation. In this sense, the results confirm a catenary-type global form that would be expected for a gravity-driven, chain-like system, while also showing that this behaviour persists in 3D chain mail despite additional constraints introduced by interlocking geometry, contact and friction.
By contrast, the underlying mechanics commonly associated with the other fitted models differ from the conditions governing the tested prototypes. Parabolic curves are often linked to idealised uniformly distributed loading, which does not reflect the present actuation condition. Fourier and sum-of-sines models, while providing high numerical correspondence, do not carry an inherent structural interpretation for a single-curved, self-weight-driven beam. Their appearance should therefore be understood as descriptive: they can visually track the measured profiles closely and thus achieve high R² values, but they should not be interpreted as representing the governing mechanics of curvature formation in this system.
Interpreted together, the span–height and curvature results suggest that scaling primarily affects the realised proportions of the actuated configuration, rather than producing a shift in curvature type. It is important to note, however, that in the present study, geometric scaling necessitated changes in material and surface conditions (as noted in the Method section). Thus, as scale increases, coupled changes in self-weight and surface friction are inherent to this experimental setup. These changes are likely to influence how contacts form and accumulate during self-transformation at each prototype scale. As the system’s jamming mechanism relies on intermodular contact to form a stable configuration, the observed behaviour should be interpreted as the combined outcome of these interacting factors, because their individual contributions cannot be isolated.
Nonetheless, while these coupled changes may influence the final span–height proportion, the global profile remains consistently well captured by the same curve models across scales. In this sense, the results confirm a catenary-type global form that would be expected for a gravity-driven, chain-like system, while also showing that this behaviour persists in 3D chain mail even as the assembly gains stiffness through jamming – a mechanism that is not typical of classical hanging chain systems. The next section examines this mechanism using intermodular opening angles as a local interaction measure, indicating how module-level contact and constraint evolve along the beam during actuation across scales.
Local interaction and scale-dependent jamming pattern
Although the global curvature profile remains well described by the Catenary model across scales, the intermodular opening angle results show that local interaction develops non-uniformly along the beam, producing a scale-dependent jamming pattern. As explained in the Background section, jamming causes the reversible stiffening that occurs as intermodular contact and friction progressively limit relative module motion. Within this context, the intermodular opening angle is used as a geometric descriptor to infer how jamming develops locally along the beam during actuation, because its spatial distribution reflects where relative sliding and rotation remain available between adjacent modules and, in turn, indicates where intermodular contact has accumulated to increasingly restrict motion.
Because actuation is initiated from a specific location, the jamming development is not uniform but progresses along the beam, contributing to the observed spatial variation in opening angles. Specifically, smaller opening angles indicate locations where contact accumulation restricts motion more strongly (stronger local jamming), whereas larger opening angles indicate zones where greater sliding and rotation capacity remains. A closer examination of the segment-level results (Table 4) clarifies how this pattern develops across three zones along the beam: the terminal end, the actuation initiation zone and the apex region.
At the terminal end, the common segment M8–M9 shows markedly smaller openings at 1:2 and 1:1 than at 1:10 (M8–M9: 1:10 = 17.3°; 1:2 = 1.1°; 1:1 = 3.1°). Nevertheless, Table 4 also shows that the 1:10 prototype actuated with one additional module pair, which means the larger prototypes reach a tight terminal contact state and terminate against the support one segment earlier. Consequently, curvature is accommodated over fewer actuated module pairs at larger scales. This suggests that available internal clearances for module sliding and rotation are taken up sooner, and intermodular contact accumulates more rapidly under increased self-weight and higher surface friction, leading to earlier jamming towards the terminal end.
Near the actuation initiation end, openings increase substantially at full scale relative to 1:10 (M1–M2: 1:1 = 29.5° vs 1:10 = 20.7°; M2–M3: 1:1 = 16.1° vs 1:10 = 7.5°). A plausible interpretation is that the substantially increased self-weight at full scale promotes greater gravity-driven sliding and rotation early in actuation, allowing modules near the actuation end to separate more widely. At 1:2, by contrast, the response is mixed across adjacent segments (M1–M2 decreases, while M2–M3 increases), suggesting that the assembly can self-transform into a slightly different local contact state under competing effects – moderately increased self-weight encouraging motion while increased timber–timber friction resists relative sliding. At full scale, although timber–timber friction is also present, the substantially higher self-weight appears to dominate the early actuation response, producing more consistently increased openings near the actuation end. Together, these observations suggest that, even under the same actuation procedure, the self-transforming 3D chain mail beams can form into different actuated configurations as the balance between weight, friction and contact constraints shifts with scale. As noted previously, these effects act in combination and cannot be isolated in the present study.
Finally, around the apex region (M4–M5 and M5–M6), pronounced differences emerge at full scale, with increased opening angles relative to 1:10. This is consistent with the global dimensions results, which show that the full-scale beam exhibits a more pronounced rise. Building on the terminal-end argument above, earlier tightening at larger scales means fewer actuated module pairs actively accommodate curvature, whereas at 1:10 curvature is distributed across more actuated pairs. As a result, the required rotation and opening become more concentrated towards mid-span, around the transition from descending to ascending geometry, producing the larger apex-region openings observed at full scale.
Taken together, the zone-specific jamming patterns indicate that scaling alters where the assembly takes up its available clearance for modular sliding and rotation during self-transformation: in the larger prototypes, tightening occurs earlier towards the terminal end while larger openings tend to develop near the actuation initiation end (and, at full scale, around the apex). These local interaction shifts provide a module-level basis for explaining how actuated configurations differ across scales, even as the global curvature family remains consistent.
Synthesis and implications for the future development of 3D chain mail systems
The global form observed in the multiscale 3D chain mail curved beams can be interpreted as an integrated outcome of scale-dependent local interactions during self-transformation. While the curvature family remains consistently Catenary across scales, span–height proportions shift because scaling alters how intermodular contacts accumulate and where motion becomes restricted through jamming during actuation. In both the 1:2 and 1:1 prototypes, terminal tightening occurs earlier than at 1:10, and curvature is accommodated over fewer actuated module pairs. However, the two larger scales differ in how the remaining opening and rotation are distributed along the beam. Together, these results support the interpretation that coupled changes in self-weight and surface friction with scaling shift the self-transformation pathway and the resulting actuated configuration, even without changing the dominant global curvature type. At the same time, as noted in the previous subsections, these effects are inherently coupled in the present study, and the observed behaviour should therefore be interpreted as the result of multiple scale-related factors acting in combination.
In the intermediate-scale prototype, increased weight appears sufficient to promote earlier terminal tightening, yet increased surface friction limits how sliding and rotation localise. As a result, intermodular openings remain comparatively distributed, producing a flatter curved configuration. At full scale, the substantially higher self-weight appears to have a more pronounced influence within this coupled response, promoting greater early sliding and rotation and leading to more pronounced opening development near the actuation initiation zone and around the apex. This concentrates curvature accommodation towards mid-span and produces the steeper configuration. Given the flexibility of the system, a more uniform global proportion may be reachable through intervention strategies (e.g. by conducting direct module-to-module repositioning) designed to overcome scale-influenced local jamming effects. However, such intervention-based tuning falls outside the scope of the present study, which focusses on self-transformation under gravity-based actuation.
For the future development of the 3D chain mail system towards large-scale applications, this distinction between global robustness and local interaction sensitivity is useful. The results suggest that curvature type under gravity and self-weight can be characterised with consistency, while local jamming patterns remain sensitive to scale and material. This highlights the potential to leverage the relatively stable global form, while also indicating the need to better understand and control scale-dependent local interactions. To achieve this, future work can build on the two limitations identified in the present study. First, although the study demonstrates that local jamming patterns vary with scale and material, it does not yet predict how mass and surface friction contribute to those changes. Second, actuation repeatability within a given scale was not quantified. Because the final configuration of this contact-driven system depends on local sliding, rotation, friction and progressive jamming during actuation, this specifically limits the extent to which any local interaction pattern can be interpreted as stable or reproducible. The findings therefore support a qualitative interpretation of scale effects, but not a predictive mapping to a unique jamming pattern. Future work could run controlled repeatability tests at each scale to quantify actuation variability. It could then test additional scales and systematically vary material and surface conditions to calibrate these effects, isolate their influences and move towards stronger predictive control of the resulting actuated configuration, including tightening the expected range of dimensional outcomes.
Conclusion
This study investigated how the structural behaviour of a gravity-actuated, self-transforming 3D chain mail beam changes when the same configuration is realised at three geometric scales (1:10, 1:2 and 1:1). Because the actuated form emerges through contact-driven intermodular sliding, rotation and progressive motion restriction under self-weight, empirical testing via physical prototyping provides a direct way to examine the system's multiscale behaviour. Using global dimensions (span and height), curvature profiles and intermodular opening angles, the study identifies both persistent structural behaviours and scale-dependent shifts in the resulting geometry.
Across all scales, the beams retained a consistent global curvature tendency that is well described by a Catenary model. At the same time, dimensional proportions did not scale linearly, and intermodular opening angles revealed increasingly non-uniform local interaction patterns with scale. These angle patterns indicate scale-dependent differences in where jamming develops along the beam during self-transformation. Taken together, the results show that robust global curvature can coexist with local interaction sensitivity as scale increases: even as increased self-weight and changes in surface friction acting in combination shift the beam’s transformation and the realised span–height proportion, these effects do not undermine the system’s ability to form a consistent overall curvature profile. More broadly, the work addresses a gap in 3D chain mail research, which has largely relied on small-scale prototypes, by providing multiscale physical evidence of comparative geometric trends and scale-dependent interaction behaviour across scales.
Footnotes
Acknowledgements
The authors thank Eugene van Dalen, Nadia Anam, A S M Forhad Hossain, Michelle Li, Harry Tweedale and the Protolab Team at Swinburne University of Technology for their fabrication support, and Daniel Prohasky for his engineering support in the development of the prototypes.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by The Indonesia Endowment Funds for Education (LPDP) and The Centre for Higher Education Funding and Assessment (PPAPT) through the Indonesian Education Scholarship (Beasiswa Pendidikan Indonesia) granted to the first author. It was also supported by the ARC Centre for Next-Gen Architectural Manufacturing funded by the Australian government (ARC IC220100030).
Ethical considerations
There are no human participants in this article and informed consent is not required.
Data availability statement
The datasets generated during and/or analysed during the current study are available from the corresponding author* on request.