
Abstract
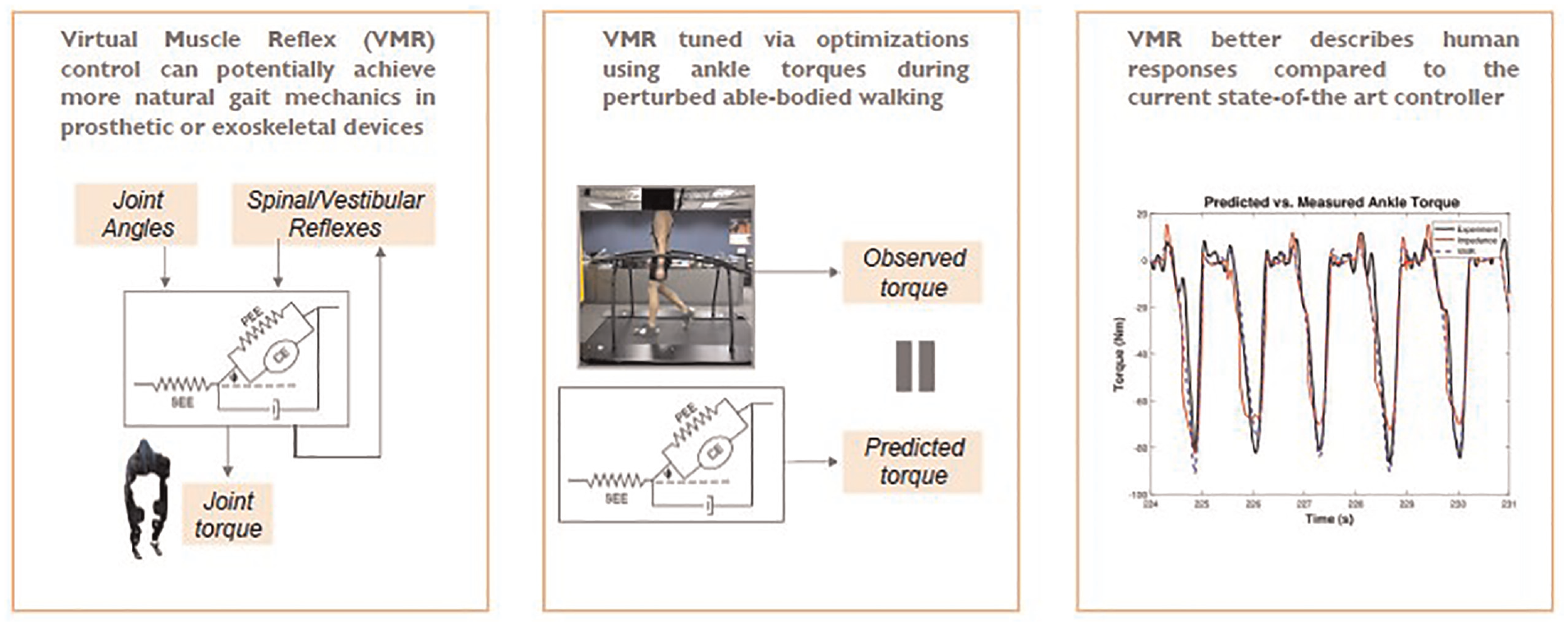
A biologically-inspired actuation system, including muscles, spinal reflexes, and vestibular feedback, may be capable of achieving more natural gait mechanics in powered prostheses or exoskeletons. In this study, we developed a Virtual Muscle Reflex (VMR) system to control ankle torque and tuned it using data from human responses to anteroposterior mechanical perturbations at three walking speeds. The system consists of three Hill-Type muscles, simulated in real time, and uses feedback from ground reaction force and from stretch sensors on the virtual muscle fibers. Controller gains, muscle properties, and reflex/vestibular time delays were optimized using Covariance Matrix Adaptation (CMA) to minimize the difference between the VMR torque output and the torque measured from the experiment. We repeated the procedure using a conventional finite-state impedance controller. For both controllers, the coefficient of determination (
Get full access to this article
View all access options for this article.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.