
Abstract
Magnetically steerable catheters (MSCs) have caught the interest of researchers due to their various potential uses in clinical applications, for example, minimally invasive surgery. Many significant advances in the design, implementation and analysis of MSCs have been accomplished in the last decade. This review concentrates on the configurations of current MSCs with an in depth look at control of the device and the specific workspace. This review also evaluates MSCs and references possible future system designs and difficulties. The concept of magnetic manipulation is briefly presented. Then, by category, the MSC is introduced. Following that, a discussion of future works and challenges of the review systems is provided. The conclusions are finally addressed.
Keywords
Introduction
The World Health Organization identified 19.3 million new cancer cases, with 10 million cancer deaths occurring globally. 1 Cancer is one of the world’s major causes of death. Early identification, diagnosis, and precise localisation are critical for decreasing lung cancer deaths.2,3 To this end, catheters are used widely across clinical practice, including in diagnosing and treating cancer, where the ability to guide catheters to desired locations is critical to cancer treatment success.4–6
Catheter technology is constantly evolving. These include a 3D kinematic steerable ablation catheter operated by magnetic forces generated by magnetic resonance imaging (MRI), a bendable catheter for bronchoscopic radiofrequency ablation (RFA) and the utilisation of real-time MRI technology to guide the navigation of custom-designed catheters.7–9 Nonetheless, catheter guidance has significant limitations, particularly for deep-seated tumours that necessitate the catheter being inserted deep into the body. The tissue is more prone to perforation, mainly when the surrounding tissues are delicate, and clinicians may puncture the tissue if they apply too much force. Furthermore, because traditional catheter steering abilities are limited, catheter steering becomes considerably more difficult as the clinician advances the catheter deeper into a patient.
Precision in manual catheter navigation is complex and requires considerable operator training. An easily steerable catheter would allow clinicians to reach target organs accurately while avoiding damage to surrounding tissue. Various catheters have been developed, including a unique multi-steerable catheter with three degrees of freedom (DOF) with increased steerability, 10 an external magnetic field was also applied to actuate a catheter that was capable of steering and unclogging actions, which increased its therapeutic mobility and functioning in blood vessels. 11 MRI has also been used to guide a catheter using magnetic gradients to maximise deflections. 12
Keywords including ‘Magnetic Navigation’, ‘Magnetic Navigation Catheter’ and ‘Steerable Catheter’ were used in the scientific search engines ScienceDirect, IEEE Xplore, and Google Scholar to generate articles between January 1, 2008, and December 31, 2021. All online library access, conference proceedings and other literature repositories for each author or expert were researched for relevant articles. The initial search resulted in 68 articles being reviewed. Following the selection of the initial articles, they were subjected to elimination evaluations. First, each abstract was carefully examined to eliminate pure clinical studies from 52 papers. Following that, articles that did not specify MSCs were eliminated. The article published in a journal was chosen to exclude duplicate or similar research articles published by the same authors. A total of 35 articles were generated. The magnetically actuated system papers were then split into three categories; Magnetic navigation by Permanent Magnet, Electromagnetic Device and MRI and all articles were studied in detail. Table 1 lists all the abbreviations used in this paper.
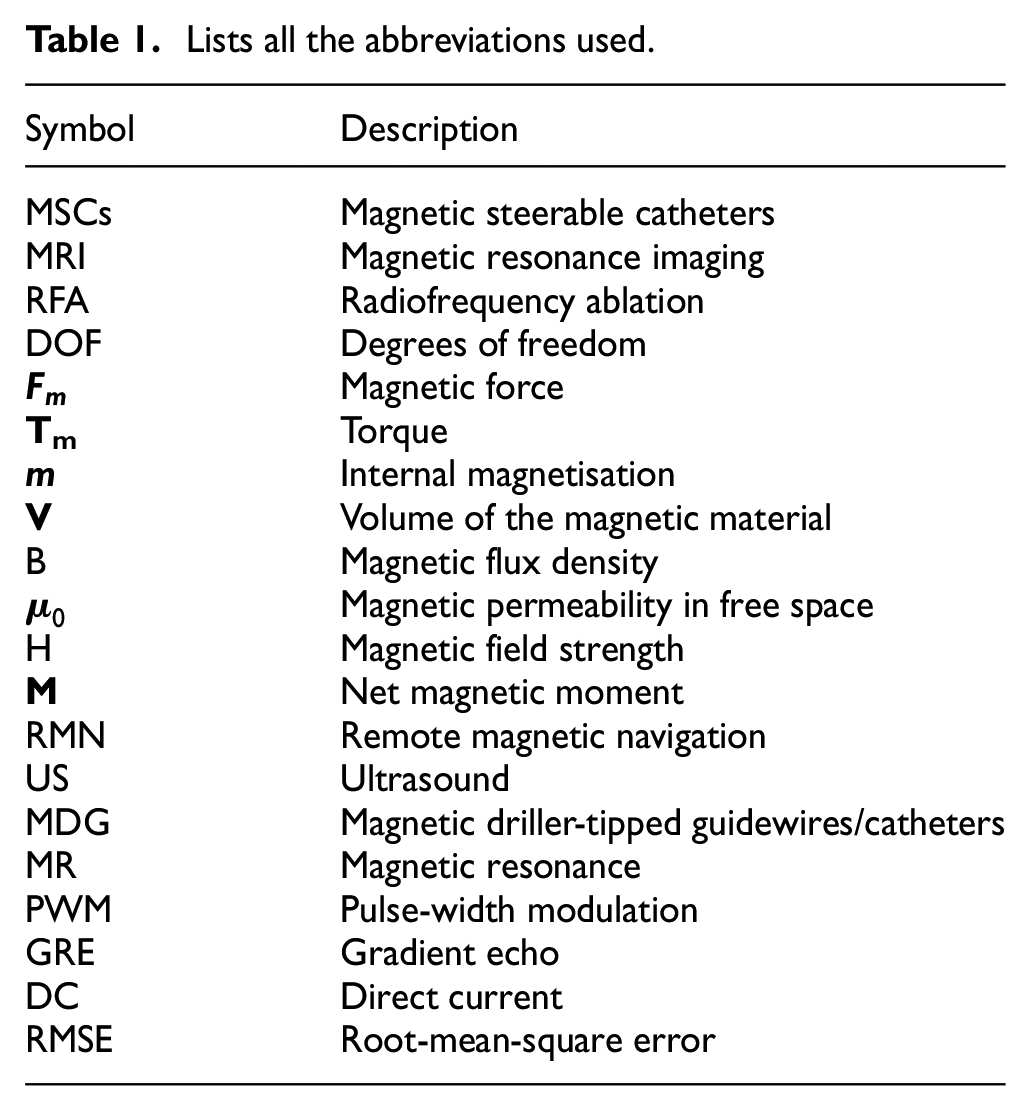
Lists all the abbreviations used.
Principles of magnetism
Initially, the fundamental concepts of magnetic manipulation are explained.
Magnetic manipulation: Force and torque
When a magnetised object is subjected to an externally applied magnetic field, it can experience a magnetic force (


where

where the magnetic permeability in free space
Magnetic field uniformity can be attributed to a relatively small geometrical variation of the magnetic material compared to a significant variance in the spatial variation of the applied field. A magnetised object’s net magnetic moment (


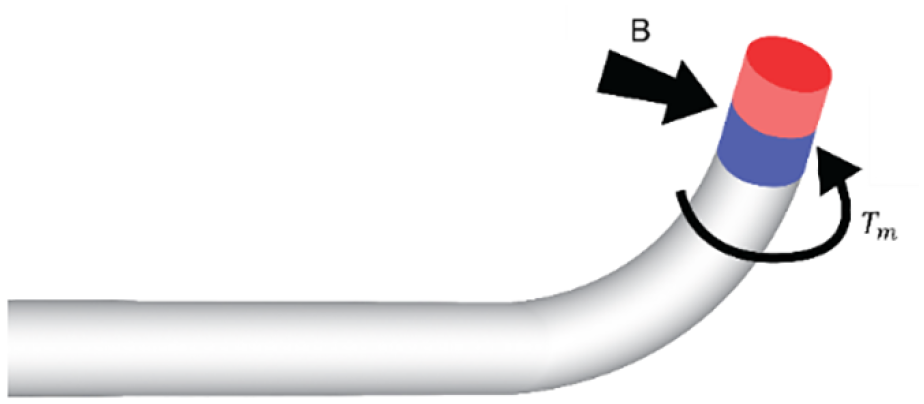
Magnetic force is used to act on a catheter further in the direction of a field gradient. According to this principle, magnetic catheters can be guided by an external magnetic field generated by electromagnets or permanent magnets (Figure 1). Because the gradients of the applied field were not zero, the catheter frequently experiences both the magnetic force and torque from equations (1) and (2). The magnetic torque, which can align the magnetic moment of a magnetic component with the applied field, has a more significant effect on steering.
The magnetic torque (
Magnetic steerable catheter (MSCs)
In various forms and angulations, the catheters in clinical procedures are selected for increased navigation to the intended target sites depending on the required treatment and anatomy. The catheter length, rigid shape and friction between the catheter and the vascular walls can make the steering of traditional catheters more challenging. 16
Magnetically steerable catheters, which utilise magnetic fields to regulate movement, are at the forefront of surgical tool innovation. 17 It is usually made of polydimethylsiloxane with a sintered neodymium iron boron permanent magnet or electromagnet. Implementing catheter steering technology enables researchers to improve the form of the catheter. A catheter with a magnet implanted on the tip is a magnetic steering catheter directed through the magnetic field. The magnetic implant can be considered a magnetic dipole in a uniform magnetic field with a moment equal to the product of the magnetic field strength, the implant’s cross-sectional area and the sine of the angle of the implant’s orientation with respect to the magnetic field. 18 Because a single magnet cannot create a magnetic field that is properly aligned with blood vessel centrelines, two or more guiding magnets are commonly used.19–22 OctoMag, for example, is a wireless manipulator with up to five degrees of freedom (DOF) It is made up of two sets of eight identical electromagnets that can move and rotate freely in any direction. 23 The advanced capabilities are due to its non-uniform magnetic fields.
Compared to other methods, one distinguishing feature of wireless magnetic actuation of magnetic navigation technology and MSCs is its advantages for directing catheters through the complex and tortuous structure of the vascular tree. Furthermore, applying a force to a magnetic component is helpful in various situations, including radiofrequency ablation in treatments such as cardiac rhythm regulation, as it provides a less-invasive catheter design that improves procedural safety. It also causes lower radiation exposure for the patient and clinician, and enhanced catheter stability, resulting in more precise energy delivery.24,25
Magnetic actuation typically relies on magnetic field changes applied to the catheter’s distal end. It could be accomplished by either attaching an external magnet or generating an internal magnetic field. Magnetic force is generated by magnetic elements or a magnetic field, which affects its magnitude and direction. The catheter tip can be guided within the body by altering the intensity and orientation of the magnetic field. Internal and external magnetic actuation can be represented as magnetic actuation. 26 This review categorised the magnetic navigation catheter into three categories: Permanent magnet, Electromagnetic device and MRI scanner according to the magnetic navigation method. Table 2 lists several of the MSCs presented in the literature.
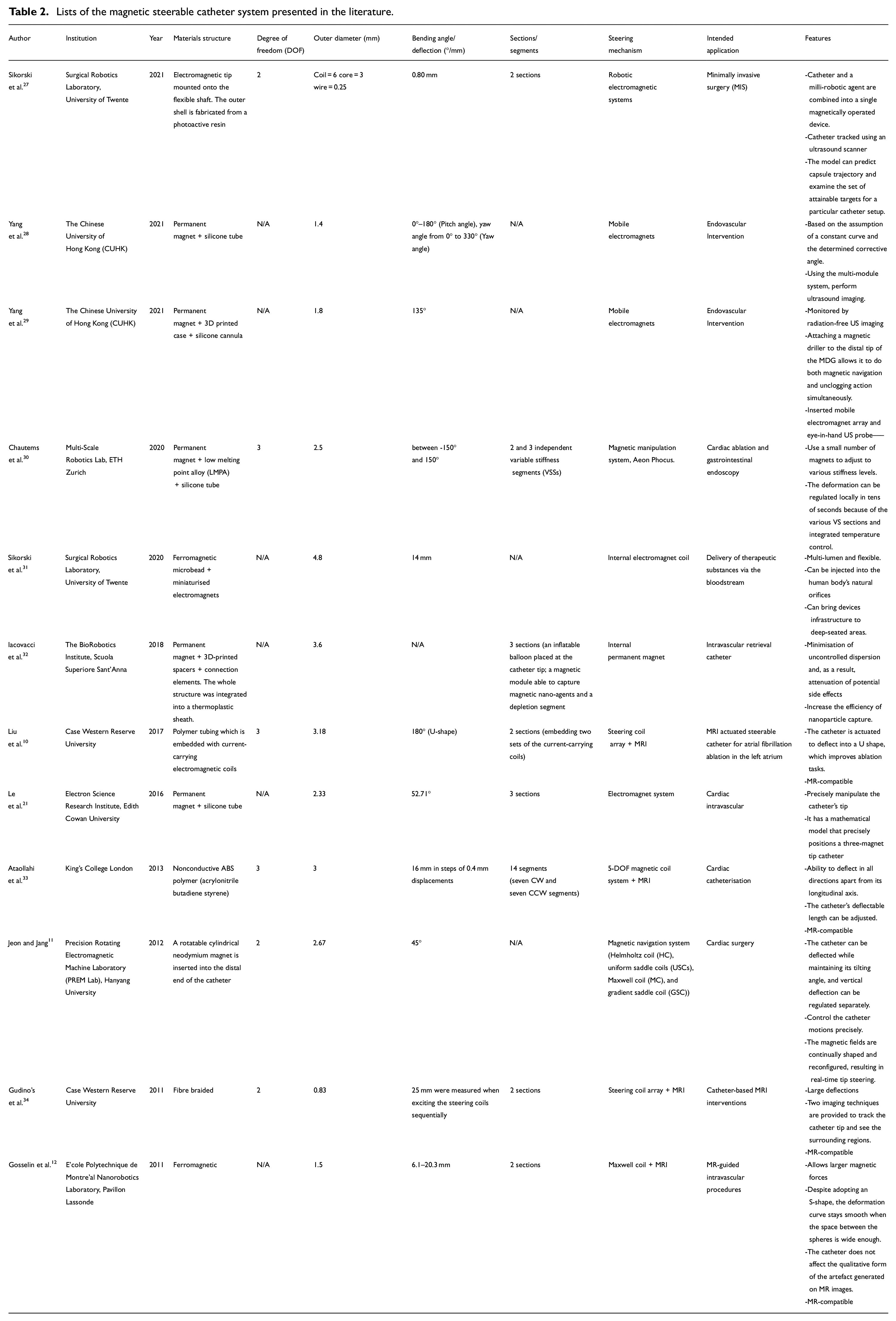
Lists of the magnetic steerable catheter system presented in the literature.
Magnetic navigation by permanent magnet
Magnets, ranging from electromagnets to permanent magnets, are used in numerous catheter designs for different control techniques. However, the most common is the permanent magnet, which can provide a solid reaction to magnetic field applications. Single magnets and multiple magnets put on the tip of these catheters generate magnetic torque and force, causing the catheter to bend. Magnetic catheters feature a soft tip, making them safer than pull-wire catheters. However, when intelligent material-actuated catheters are used, catheter stiffness is required to maintain the catheter’s form and the catheter’s stiffness also varies during insertion; determining the non-linearity and uncertainty is crucial. Permanent magnets and innovative materials can be used in combination to control stiffness. A new variable stiffness magnetic catheter (Figure 2(a)) was developed using two and three variable stiffness segments for cardiac ablation and gastrointestinal endoscopy. 30 A magnetic catheter design introduced uses a variable stiffness magnetic catheter with permanent magnets located on the catheter tip. The magnetic catheter’s system can be set to different stiffness levels through electrical currents, allowing for more accurate device control. The system delivers equal degrees of magnetic accuracy, and the different degrees of freedom given by the system’s segment stiffness change. Simultaneously, due to the apparent ability to direct within the heart utilising complex-shaped curves, new and more patient-specific therapies, further design refinements, and experimental validation could be developed in the future.
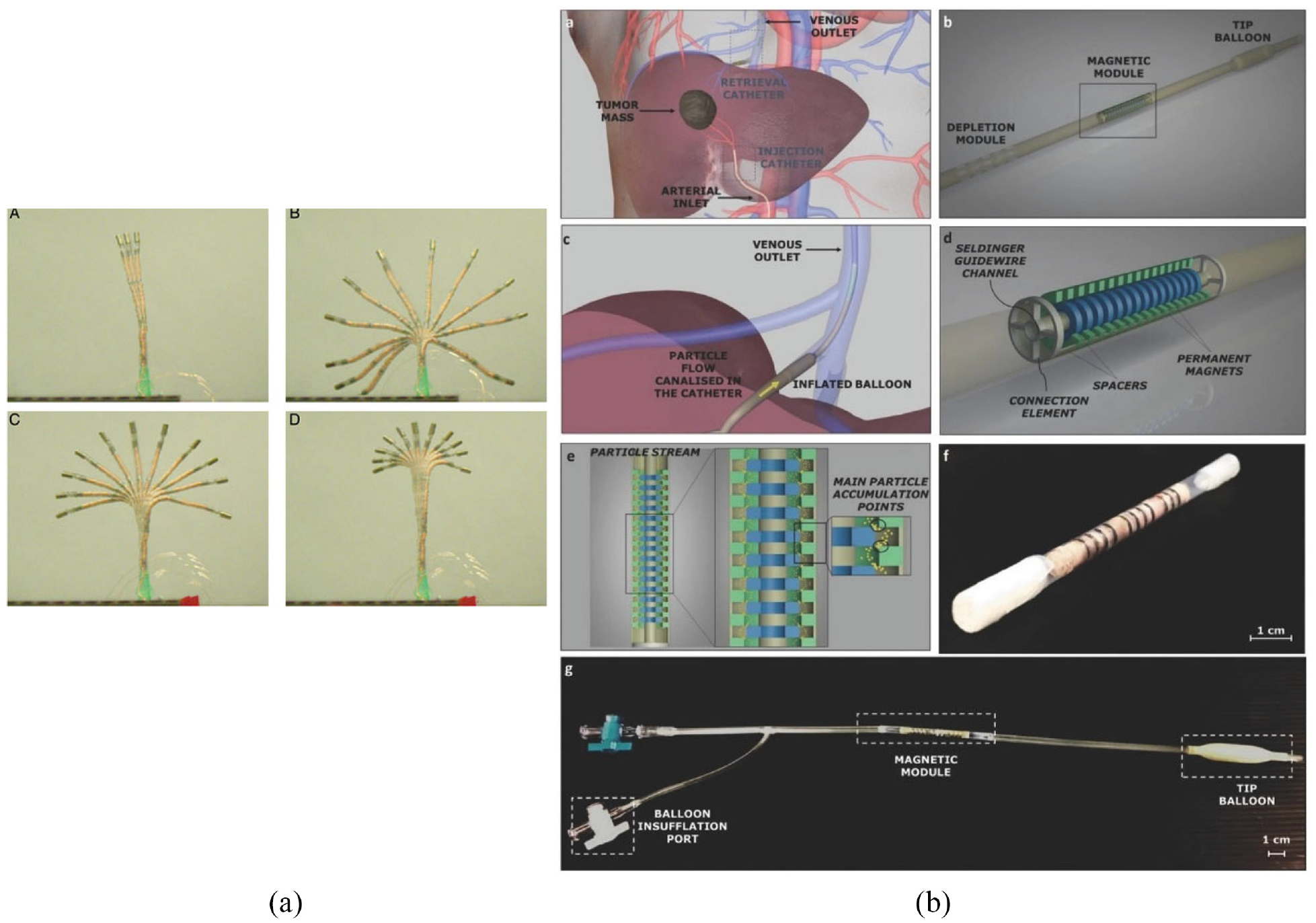
Additionally, using the commercial remote magnetic navigation system (Niobe system, Stereotaxis), remote magnetic navigation (RMN) has also been developed. 35 RMN can utilise magnetic field technology to insert specifically designed soft-tip ablation catheters anywhere in the x, y, or z planes inside the patient’s chest. As RMN appears to be equally as successful as hand ablation but with fewer consequences and less total radiation exposure, it can reduce the likelihood of issues during cardiac imaging by decreasing the contact force between the catheter and the heart. However, further experimentation is needed to demonstrate that RMN is superior to the traditional method of manual ventricular tachycardia ablation. In order to improve the safety of such treatments, the idea of magnetic micro object capture was extended to the fields of micro/nanorobotics and nanomedicine. 36 To be completely acceptable, medical microrobots should be biodegradable or removed after task completion to avoid short- and long-term adverse effects. An intravascular catheter (Figure 2(b)) capable of retrieving magnetic micro and nanorobots from the circulation was presented to achieve this goal. 32 A treatment-independent intravascular catheter is designed to collect magnetic nanocarriers from the blood for prospective therapy while reducing uncontrolled dispersion and undesirable effects. The system consists of multiple permanent magnets placed in two coaxial series. This approach allows new ‘high-risk/high-gain’ medication formulations to be developed and enables the development of innovative treatment procedures that include magnetic hyperthermia or magnetic microrobots.
Magnetic navigation by electromagnetic device
In addition, to the one produced by permanent magnets. A catheter with three magnet tips was shown to be effective since a three-magnet catheter tip provides various advantages over a single-magnet catheter tip, the most significant of which is its ability to generate a greater deflection force. Although multiple magnets tip will increase the weight and structural complexity of the catheter, a catheter with three magnet tips eliminates the need for a super-elastic pull wire to steer the catheter tip. In order to move and place any object within a magnetic field in 3D space, the three coordinates X, Y and Z must all be addressed simultaneously. To accomplish this and allow the catheter tip to bend, magnets embedded in the catheter must be responsive to variations in the field in each of these three planes. Using this flexibility can be achieved with less force and greater precision. An electromagnet device algorithm can also control an intravascular three-magnet tip catheter (Figure 3(a)) in the human heart. 21 A developed mathematical model can accurately predict an electromagnet system’s magnetic field, magnetic torque, and force and move and deflect the catheter tip in a workspace. This study shows that the model can precisely place a three-magnet tip catheter inside an eight-electromagnet workspace. The ability of the mathematical model to predict catheter tip displacement, movement, and deflection as a function of magnetic current levels was experimentally tested. The results indicate that as the catheter tip is bent farther by a more robust electric current, the magnetic torques and moments of force on three magnetic seeds also alter. The catheter has a total bending angle of 52.71°, ranging from 35.41° to +17.30°. Finite-element analysis indicates that electromagnets can be miniaturised to provide sufficient magnetic force for micro-agent steering while maintaining a compact size and low power consumption. A micro-robotic infrastructure loaded into a magnetically actuated catheter called MILiMAC is developed. 31 MILiMAC (Figure 3(b)) is a flexible catheter with magnetic actuation at the surgical target area powered by three small electromagnets. Its feasibility is shown by directing a ferromagnetic microbead in a test platform utilising closed-loop position control with user-defined trajectories. The mean error of 0.41 mm and the steady-state error of 0.27 mm is the best performance metrics for all trajectories.
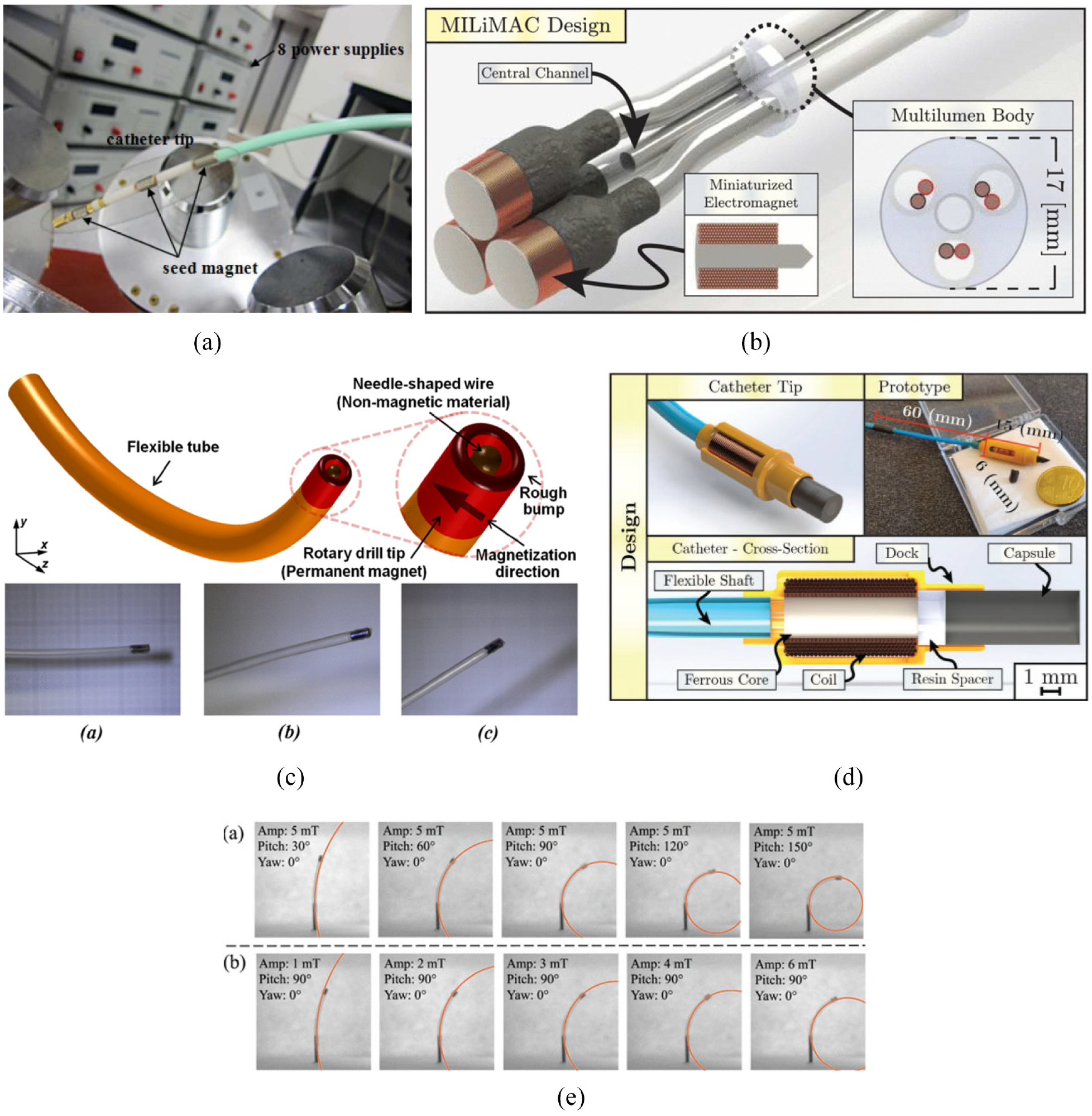
Magnetic steerable catheter navigated by an electromagnetic device: (a) three small magnets on the tip of a catheter tip, 21 (b) MILiMAC is a proof-of-concept device that shows the therapeutic significance of localised magnetic actuation of micro-agents utilising small electromagnets, 31 (c) illustration of the catheter’s schematic and magnetic drill tip drilling movements, 11 (d) a magnetic catheter can deliver and recover untethered capsules in challenging-to-reach places 27 and (e) deformation under external magnetic fields. 28
Furthermore, catheter-enabled steering and unclogging movements to improve therapeutic mobility and function in human blood arteries have been developed, and a navigation technique uses a magnetic navigation system to create and regulate the steering accurately and unclogging movements. 11 The catheter has a flexible tube with a rotating permanent magnet (Figure 3(c)). A catheter is made out of a flexible tube with a rotating permanent magnet drill tip, and two kinds of magnetic coils produce magnetic fields: uniform and gradient coils. The Euler-Bernoulli beam equation explains the catheter’s tilting angle and vertical deflection. Experiments show that the proposed technique efficiently controls vertical deflection, tilting angle, and drilling velocity with two significant advantages. Most important is the improved distal tip stability and the increased contact force. Also, the system can constantly and quickly shape and reconfigure the magnetic fields, resulting in instantly real-time tip steering.
Controlling the magnetic field using permanent magnets by altering their relative positions without a power-switching mechanism can pose safety concerns. Indeed, electromagnets can turn the whole system on and off. However, the main disadvantage of controlling electromagnets is that the magnets exhibit non-linear behaviour, particularly hysteresis, which is challenging to regulate. 39 Another disadvantage is that the management of horizontal bending and that vertical bending are inextricably linked. Finally, because the magnetic field can only serve as one driving source, the magnetic method can only actualise one section structure.
A flexible magnetically actuated catheter that releases and recovers an untethered magnetic capsule has also been designed (Figure 3(d)). 27 A high-tech robotics system uses magnetic manipulation to manipulate the catheter. With an average inaccuracy of 0.37 mm, ultrasound scanning can adequately recreate the catheter’s 3-D structure. A closed-loop position controller guides the catheter with an average inaccuracy of 0.82 mm. This research also establishes capsule dynamics and trajectory prediction. The catheter actuation null-space (mean residual tip displacement of 0.8 mm) is demonstrated to be utilised to target the capsule. A capsule delivery and recovery to and from an inaccessible target is also shown, demonstrating the instrument’s ability to reach difficult areas. However, managing traditional passive catheters, such as their long duration, remains challenging. Magnetic control of a steerable catheter is shown using ultrasound (US) guidance. 28 An efficient kinematic model is developed to characterise the relationship between the applied magnetic field and tip deformation after the design is made via replica moulding (Figure 3(e)). The device incorporates three electromagnets and a US probe to offer large-workspace magnetic field generation and feedback. An autonomous control framework is also provided, via which the catheter may be carried to the target area. According to the data, this kinematic model well predicts the deformation. The entire approach was evaluated using a phantom that resembles vascular structures. Magnetic driller-tipped guidewires/catheters (MDGs) are developed, bending in directional magnetic fields and mechanically drilling in rotating magnetic fields. 29 During the preoperative and intraoperative stages, a control system is devised and built to internally coordinate all system components, deal with noisy US images and simplify operation. Although the rigidity and composition of blood clots vary depending on formation time and other parameters, an artificial thrombus is used to validate the drilling mode. Convective flow improvements and mechanical rubbing could hasten the interruption of blood clots. Using an optical camera, flexible navigation in directional magnetic fields and efficient unclogging in rotating magnetic fields are demonstrated experimentally. The whole system and control approach was also verified in in vitro studies employing image monitoring. The MDG has a 100% success rate in all trials and an average speed of 2.14 mm/s in bifurcations and clots. The presented technique could benefit peripheral vascular disease treatment regarding operational safety and therapeutic outcomes.
Magnetic navigation with MR-compatible
MRI scanners are fundamentally incompatible with the magnetic Niobe system; however, the potential of using them in an MRI environment opens up a new path for catheter guidance.37,38 The development of conditional MRI technologies, which utilise the MRI scanner’s electromagnetic coils as a power source, has allowed actuation, position detection and force sensing. 37 MR-compatible 3-DOF cardiac deflectable catheter steering (Figure 4(a)) is introduced. 33 Four braided high-tensile spectra fibre tendons control the steerable distal end, and clockwise and anticlockwise helical segments are used to correct longitudinal twists. Its carbon fibre backbone enhances structural and steering consistency. The catheter tip’s 3-D route and placement repeatability were assessed using a 5-DOF magnetic coil tracking device. It could be possible in the future to replace the magnetic tracking coil with an active MR (Magnetic Resonance) tracking coil that can be utilised in MRI scanners. Besides that, an MRI system with separate steering coils in the catheter tip (Figure 4(b)) is designed to extend the concept of deflecting the catheter tip using the magnetic force generated by an MRI system. 34 Pulse-width modulation (PWM) current sources controlled the steering coils, and the deflections of the catheter tip were measured using spoiled gradient-echo images. A modified Gradient echo sequences (GRE) sequence was then used to produce a hyperintense signal at the catheter tip utilising the steering coils’ local magnetic fields. The deflection was half that of when one axial coil was excited, and it was also 30% greater in current than when the steering coils were excited sequentially. The modified GRE sequence aided in detecting a hyperintense catheter tip, which helps in catheter tracking. However, there are a few concerns to this approach. DC currents could generate heating, and it has been shown that if one of the coils is excited at its maximum current, the temperature changes significantly which can offer a worst-case scenario for heat dissipation in which the blood flow might result in heat convection.
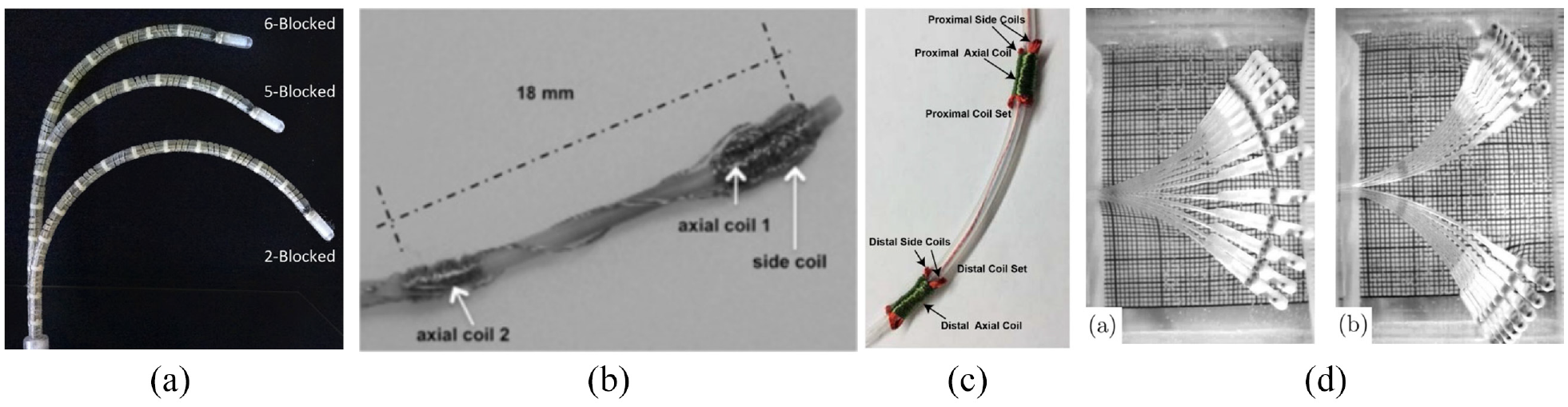
Magnetic steerable catheter with MR-compatible: (a) prototype catheter with a deflected tip in three lengths for steering, 33 (b) a 42-gauge wire coil array is mounted on a 2.5-Fr braided microcatheter, 34 (c) a catheter prototype was utilised in the experiment 9 and (d) images of the catheter’s deformation after being subjected to an increasing range gradient with various catheter tips. 12
Based on 34 technique, 6 A steerable robotic ablation catheter (Figure 4(c)) that utilises current-carrying micro coils and MRI magnetic forces is developed. 9 A robotic catheter for atrial fibrillation produces a three-dimensional model with finite differences where each finite segment has an equilibrium quasi-static torque-deflection equation, and the model utilises deflection displacements and torsion angles. Results show that the suggested model can accurately estimate catheter deflection motion. The maximum error in tip deflection is 4.70 mm, while the maximum root-mean-square error (RMSE) in shape estimation is 3.48 mm. Due to time constraints, the deflection measuring approach adopted in this research may not be used to regulate the catheter’s shape once it has been manually identified from MRI scans. Because the artefacts on the coils are apparent, it may be possible to track the catheter in real-time. Another limitation of this research is that it only examines the proposed model in motion in a single cross-sectional image plane. In order to identify nonplanar deflection, coronal slices must be used to recreate the catheter form. The inverse Jacobian kinematics iterative approach for steerable intravascular catheter systems is then presented. 40 Magnetic torques applied to the catheter’s current-carrying micro-coils drive the piston directly, and a three-dimensional kinematic model of the catheter deflection is used. The result showed that the method could do complex computational and analytical tasks using an open-loop catheter.
Moreover, an MRI-controlled steerable catheter for atrial fibrillation ablation is also shown. 10 The polymer tubing catheter prototype is equipped with electromagnetic coils that produce electricity, and the current passing through the coils can be adjusted to move the device. To fulfil the necessary functions, the catheter must reach and maintain contact with a set of desired targets selected by a clinician on the catheter chamber and stay stable. In order to maximise guiding performance, the design approach includes evaluating the catheter’s workspace in free space. This approach was validated by building a virtual model of the left atrium and running an ablation simulation using a realistic atrium layout. This validation shows that the prototype can apply the suitable ablation force to all the target areas while also creating a good seal around the chamber. However, there is some concern regarding Joule heating in electromagnetic coils. The coils could encounter considerable Joule heating due to the highest current value in catheter design optimisation, resulting in harmful temperature rises. Several methods can prevent heat from escaping while adequately distributing the generated heat. Pumping saline coolant through the catheter lumen to actively cool the heating coils; wrapping the coils over a lightweight heat conductor, such as an aluminium oxide substrate; or applying a layer of thermal insulation coating to the coils to retain the heat. 41
In order to create a catheter with magnetic characteristics, an alternative method is to add ferromagnetic components. However, this method necessitates using two distinct magnetic excitation fields to achieve catheter orientation and steering: a permanent magnetic field to magnetise the ferromagnetic element to saturation and a magnetic gradient to generate deflections. 42 A catheter tip coupled with ferromagnetic spheres, which can be controlled by changing magnetic field gradients, is another method that uses magnetic forces to guide a catheter in the MR field. A catheter’s deflections (Figure 4(d)) in an MR environment can be quantified using ferromagnetic tips and high-gradient coils. 12 The researchers focused on how these spheres and various catheter tip designs affect the fast-imaging sequence artefacts. The distance between the two ferromagnetic spheres can be varied to balance the need to decrease tip size with the undesirable dipole-dipole interaction. Conversely, when the spacing is too close, the interaction creates a strong torque on the catheter tip to minimise tip size, resulting in the non-linear jump phenomena. If the amplitude is undesirable, the catheter cannot be accurately regulated. Furthermore, utilising more ferromagnetic material leads to a more significant artefact. Consequently, imaging tissues within a few centimetres of the ferromagnetic body will be impossible. All studies and simulations were performed on catheters with free boundary conditions, which vary from when the catheter is put into a patient’s body and encounters the blood vessel at many points.
Challenges and future works
Manoeuvrability and performance
Many advancements in the design of conventional catheters have been developed over the years to offer patients catheter configuration options. Steerable technologies have enhanced catheter dexterity by allowing surgeons control over the catheter’s distal shape. Commercial techniques for providing distal-tip force sensing in ablation catheters are also available for implementing force sensing within the catheters.
A magnetic catheter combines innovative magnetic materials with high flexibility and magnetic domain programmability with unique printing methods. This method generates new possibilities for development while also presenting different challenges. Although soft innovative materials can help overcome the dimensional limitations of permanent magnets while eliminating the wiring and powering requirements of electromagnets, providing these materials with magnetic properties that allow them to be controlled at a distance compatible with in-body operation remains a concern. Besides, there is a concern about such materials’ mechanical properties, which must be addressed during the push-pull phase to reach the target and when direct interaction with tissue is needed. Future research should concentrate on new materials and manufacturing techniques that allow for downsizing while delivering suitable magnetism profiles and variable stiffness to improve magnetic-guided catheters.
Additionally, manoeuvrability includes navigating and the potential to do complex tasks. The magnetic catheter can have a considerable bending angle, and its bending angle is controlled by navigation. The higher a device’s manoeuvrability, the easier and faster it is to handle the large amplitude of the bending angle. Furthermore, due to magnetic fields interfering with one another, the magnetic navigation catheter system does not enable using more than one catheter at a time. Also, the hydrophilic coating of the catheter can be used to improve lubricity, resulting in low and stable friction for the relatively short distance that the catheter slides against the vessel wall during the catheterisation procedure, thereby improving catheter manipulation performance. 43
The size of the catheter is one of the factors in minimising patient discomfort. The essential requirement is that the catheter be small in diameter. The construction and manufacturing techniques, to some degree, affect catheter size. As a result, the magnetic catheter only embeds a tiny magnetic tip at the distal tip. They are independent of any other wires or channels, resulting in their minimum diameter.
Safety concerns and low cost
Patient and medical staff safety is one of the most important aspects to consider when developing a medical device since medical equipment hazards can be fatal. The stiffness of the catheters is one factor that affects safety, and magnetic navigation catheters can be built with soft and small distal ends, but they are somewhat stiff.
Due to both downsizing and implementation expenses, disposable catheters with distal-tip sensing capabilities are costly to produce. However, steerable technology like magnets is currently the only one used in clinical settings. With this fact, more advances in their downsize, control and cost are needed to make them more accessible.
Clinical regulatory issues and practical consideration
Clinical regulatory agencies such as the European Medicines Agency and the United States Food and Drug Administration evaluate medical devices to see if they can be used clinically. These authorities’ regulations must be observed while developing medical equipment. The primary concerns of regulations are reliability, ease of use and user safety. All medical equipment and treatments have some risks, but the benefits to patients must outweigh the risks. The proposed device’s risk-to-benefit ratio will be compared to current technology for the same application to determine clinical approval. Clinical approval is influenced by implementation costs such as time, effort and money. Magnetic actuation devices can improve the flexibility, dexterity, safety and accuracy of minimally invasive medical procedures compared to existing methods. Ease of use, high repeatability, time efficiency and cost-effectiveness in clinical applications are essential.
Conclusions
The magnetic actuation system’s performance directly impacts clinical applications as a remote actuation tool with a controlled magnetic field fulfils the locomotion needs of magnetic robots in restricted spaces. This review describes the magnetic navigation catheter systems, covering the fundamental theory, systematic setup and potential challenges. The preliminary results have shown that magnetic actuation methods still require additional research and validation. Magnetic actuation systems will enable significant improvements when combined with other cutting-edge biomedical innovation technologies such as advanced control methods.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported in part by the Academy of Medical Sciences Professorship, Royal Society Wolfson Fellowship, Cancer Research UK (EDDPMA-Nov21\100026) and National Institutes of Health (NIH) Bench-to-Bedside Award. This study was also supported by the NIH Center for Interventional Oncology: Grant ZID# BC011242 & CL040015, and the Intramural Research Program of the National Institutes of Health.