
Abstract
In order to meet the strict requirements of the reliability and safety of the commercial operation of the maglev train, it is necessary to carry out the control performance evaluation of the suspension system. However, at present, variance is often used as the evaluation index of control system. This method cannot get accurate performance evaluation results when the system is affected by non-Gaussian disturbance. Therefore, aiming at the non-Gaussian control performance evaluation of maglev train suspension system, a control performance evaluation method of maglev train suspension system based on minimum entropy is proposed in this paper. In view of the non-Gaussian characteristics in the operation data of maglev train suspension system, this paper introduces the feedback invariant entropy of non-Gaussian system, and then realizes the evaluation and analysis of the control performance of maglev train suspension system based on the minimum entropy criterion. Finally, combined with the evaluation and analysis of the operation data of Changsha medium and low-speed maglev train, this paper verifies the effectiveness and accuracy of the proposed performance evaluation method for the control performance evaluation of maglev train suspension system.
Keywords
Introduction
As a new rail transit tool with mature technology, quiet operation, high degree of localization and comfortable ride, the normal conducting maglev train is welcomed by the citizens. At present, it has been well integrated into people's daily transportation and has achieved fruitful commercial application, including Beijing Maglev Line S1, Changsha Maglev Express Line, Shanghai High speed Maglev Demonstration Line and Phoenix Cultural Tourism Maglev Line, it was widely praised. In addition, Maglev commercial operation line projects such as Guangdong Qingyuan Maglev Tourism Line are being vigorously promoted. As one of the key components of the maglev train, the suspension control system directly determines the operation quality and reliability of the maglev train. However, the maglev train has been working in a complex interference environment for a long time, and it is very difficult to ensure high reliability and high safety to meet the high-intensity public transport task. Because the suspension system is an open-loop unstable system with complex nonlinear characteristics, there are a large number of dynamics that are difficult to model (such as uncertain passenger loads, complex external force disturbances, end vortex effects, and train track interaction), making it difficult to obtain an accurate mathematical model of the system. In addition, the complex operating conditions of commercial maglev trains after being put into operation can cause various disturbances to the suspension system, mainly including the deformation of the track beam caused by the increase of vertical deflection after the track beam is under pressure, uneven settlement of the low line roadbed, misalignment caused by settlement differences, and bending caused by the settlement of the road bridge, road tunnel transition section, or any two sections of roadbed. The system will not be able to ensure high-performance suspension tracking control. In recent years, with the landing of commercial maglev projects, the acceleration of medium speed maglev projects, and the aging of the suspension control system of the built maglev operation line, the current demand for the control performance evaluation of the maglev train suspension control system has increased dramatically. However, the research on control performance evaluation of maglev control system is relatively less. Therefore, in order to meet the stringent requirements for the reliability and safety of the commercial operation of the maglev train, it is very necessary to carry out the research on the control performance evaluation of the maglev train suspension control system. The results of the control performance evaluation directly affect the maintenance engineers' judgment on the safety of the maglev train operation, as well as the decision on whether to carry out the controller tuning optimization for the maglev train suspension control system.
In addition, literature 1 pointed out that the maintenance of the control system can significantly improve the control performance of the system through the analysis of numerous industrial control system cases. Therefore, in order to solve the control performance degradation problem of most non-stationary and nonlinear control systems for a long time, it is necessary to carry out continuous control performance evaluation for the maglev train suspension system.
The control performance evaluation originated from the analysis and research of single input single output control loops in the industrial circles in the 1960s. The rise time, stability time, overshoot and other control performance evaluation indicators based on step response were generally accepted as reference standards at that time. However, this method based on step response needs field experiments and can satisfy the excitation in a wide frequency range, which is difficult to achieve in some actual industrial scenarios.
Numerous studies show that the evaluation of control performance should depend on the control loop data of the normal operation of the system. Advanced sampling methods and powerful computing power have spawned a large number of new methods based on data and statistics. 2 Among them, several popular control performance indicators, such as mean, standard deviation and variance, are defined based on the statistical characteristics of Gaussian normal distribution data. The mean value reflects the steady-state error of the control system, and the standard deviation or variance reflects the dynamic performance of the control system. 3 Previous research on control performance evaluation mainly adopted the control performance evaluation method based on minimum variance, including the performance evaluation of feedforward control system, 4 unstable and non-minimum phase system 5 and time-varying system. 6 The minimum variance performance index was first proposed by Harris in 1989, 4 as the index used to evaluate the performance of feedback control loop in most current research and commercial activities, it is very effective in evaluating linear Gaussian system. Because this method is based on the assumption that the data perturbation has Gaussian distribution characteristics. However, according to the operation data from various industrial control systems, the system is generally affected by non-Gaussian noise. At this time, the control performance evaluation based on the minimum variance may be unreasonable. 7
In recent years, the booming maglev rail transit system is also facing this problem, which makes most of the current control performance evaluation methods based on Gaussian distribution assumption unable to accurately obtain the evaluation results of the control performance of maglev train suspension system. Therefore, a performance evaluation method of maglev train suspension system based on minimum entropy is proposed in this paper. In the following sections, the non-Gaussian distribution characteristics of maglev train suspension system operation data, the control performance evaluation method of suspension system and the control performance evaluation method based on minimum entropy based on the assumption of non-Gaussian distribution characteristics will be analyzed respectively.
Analysis of maglev train suspension system
Suspension system model analysis
As one of the key components of the maglev train, the suspension system realizes the decoupling control of multiple suspension points of the maglev train through the mechanical decoupling of the bogie and the role of the air spring, reducing the complexity of the maglev train suspension control, as shown in Figure 1. The magnetic levitation frame device adopts a modular structure, and the left and right modules are connected to form a magnetic levitation frame through anti roll beams. The module is equipped with five units on both sides of the vehicle's running direction, forming a body support that is almost the same length as the vehicle. There are air springs between the vehicle body and the module to cushion the vertical and horizontal impact forces, and due to the use of anti roll beams between the left and right modules, independent motion is formed, allowing the modules to perform stable vertical, lateral, nodding, and deflection movements relative to the track without rolling. This paired modular structure can be regarded as an elastic vehicle bogie, where the left and right modules independently track the track when passing through gentle or curved curves, with a certain degree of freedom. Therefore, mechanical decoupling between various suspension points can be achieved. Among them, the suspension system of the most representative normal conducting medium-low speed maglev train, such as Changsha medium-low speed maglev train, is composed of suspension frame, electromagnet and F-type guide rail. The suspension system suspends the maglev train body above the track by generating electromagnetic attraction between the electromagnet and the F-type guide rail, maintaining 8–12 mm suspension gap. Because of the complex nonlinearity of the suspension system, when the system model changes, it will greatly affect the suspension control performance, so it is necessary to accurately monitor the control performance of the maglev train suspension system, so that the maglev train operators can adjust the suspension control strategy of the suspension system in time. In addition, there are other ways to realize the stable suspension of maglev train, such as relying on electric repulsion, but this way of relying on electric repulsion does not need active control. Structure diagram of Changsha maglev train and its suspension system. Single-point electromagnetic levitation system of maglev train and its simplified model.
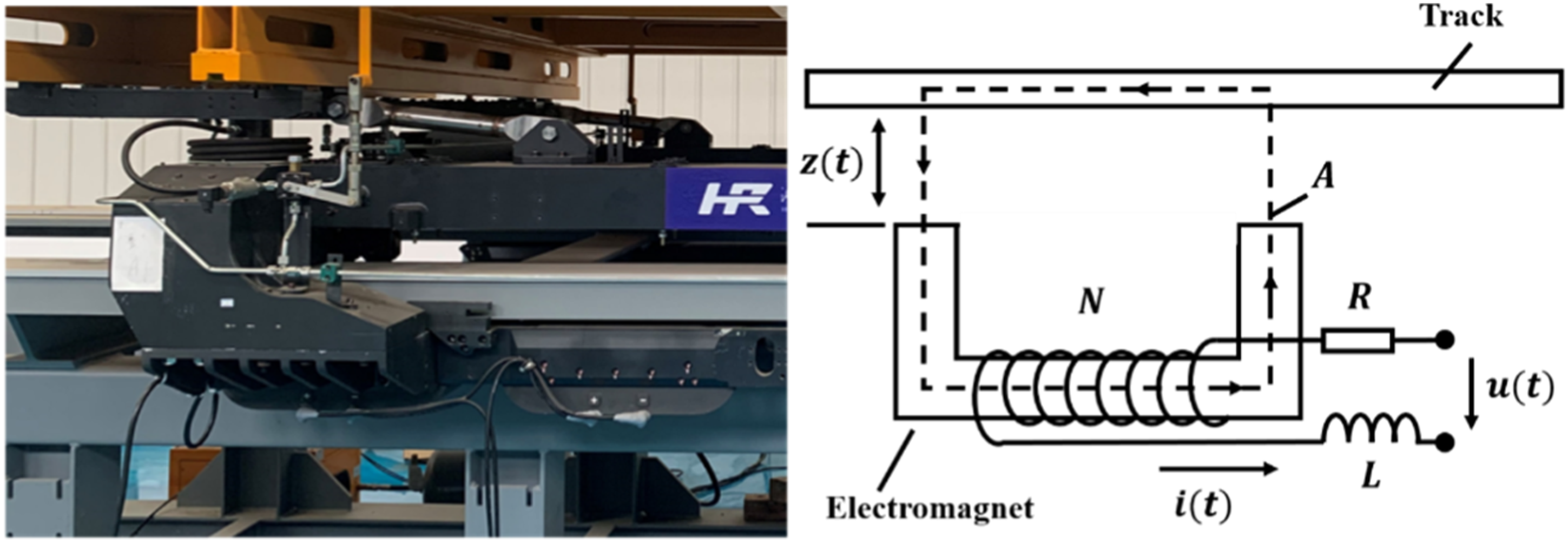
The suspension system of maglev train decomposes the suspension system of the whole train into a single electromagnetic suspension system through the mechanical decoupling of bogie (Figure 2). Therefore, this paper analyzes the model characteristics of maglev train suspension system according to the single point electromagnetic suspension model.
According to literature,
8
consider the single point electromagnetic levitation system. The equivalent mass of the suspension magnet is m, the air gap between the electromagnet and the track is z(t), the number of turns of the electromagnet coil is N, the cross-sectional area of the electromagnet is A, the voltage and current of the electromagnetic coil are u(t) and i(t), the resistance of the coil is R, the inductance of the electromagnetic coil is L, and the vacuum permeability is μ. According to Maxwell equation and Biot-Sava theorem, the electromagnetic force of single point electromagnetic suspension system is:

The voltage of the electromagnet coil u(t) is:

Assuming that

According to the above two equations, taking
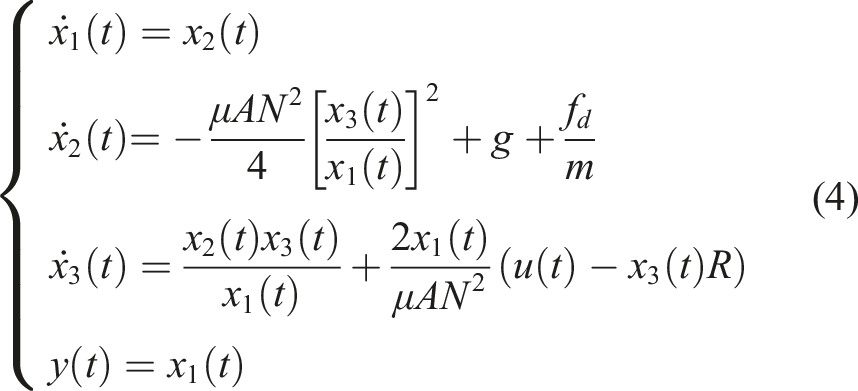
The single point electromagnetic suspension system is a complex third-order nonlinear system. Taylor expansion near the equilibrium position is often used to realize the linearization of single point electromagnetic suspension system, and then PID control strategy or state feedback control strategy is often used to realize the stable suspension control of suspension system. Moreover, because the suspension system is an unstable system, the suspension gap can only fluctuate in a limited small range. Therefore, when the control performance of the suspension system degrades, the working state of the suspension system can easily change from stable suspension to oscillation, and even further evolve to rail smashing. However, the current research on the performance evaluation of suspension system is not perfect, and the performance evaluation system of suspension system has not been established. Therefore, with the vigorous development of maglev rail transit system, it is very urgent to carry out the research on the control performance evaluation of maglev system. Combined with the characteristics of suspension system, the performance evaluation of suspension system can learn from the research results of other fields. For this kind of data with complex nonlinear characteristics, the method based on minimum entropy is very useful.
non-Gaussian characteristic analysis of suspension system operation data
Due to the complex nonlinearity of the suspension system itself and the external disturbance of the suspension system with unknown distribution, the operation measurement data of the suspension system are not all linear, quadratic or Gaussian distribution, and these measurement data often show a richer distribution form. Literature 9 points out that there are numerous outliers in the measurement data of the actual industrial control system, which constitute the fat tail of the whole measurement data distribution.
Currently, the discussion on the origin of fat tail in the distribution is not clear. For Gaussian distribution, it is usually inclined to underestimate the possibility of events far from the mean (outliers). However, the fat tail part of the probability distribution function is composed of these outliers. 10 Studies have shown that the fat tail of the probability distribution function may be caused by some abnormal behavior patterns. 1 In addition, In the actual industrial control process, the interference of the system is often not only Gaussian noise, but also non-Gaussian noise such as beta noise. 11
The data acquisition system of the maglev train suspension system is mainly composed of suspension gap sensor, acceleration sensor, current sensor, temperature sensor and corresponding data receiving and processing modules. It can collect the data of suspension gap, vertical acceleration, lateral acceleration, electromagnet working current and electromagnet coil surface temperature during the operation of the maglev train, with a sampling rate of 1kHz. As shown in Figure 3. Suspension data acquisition system of maglev train.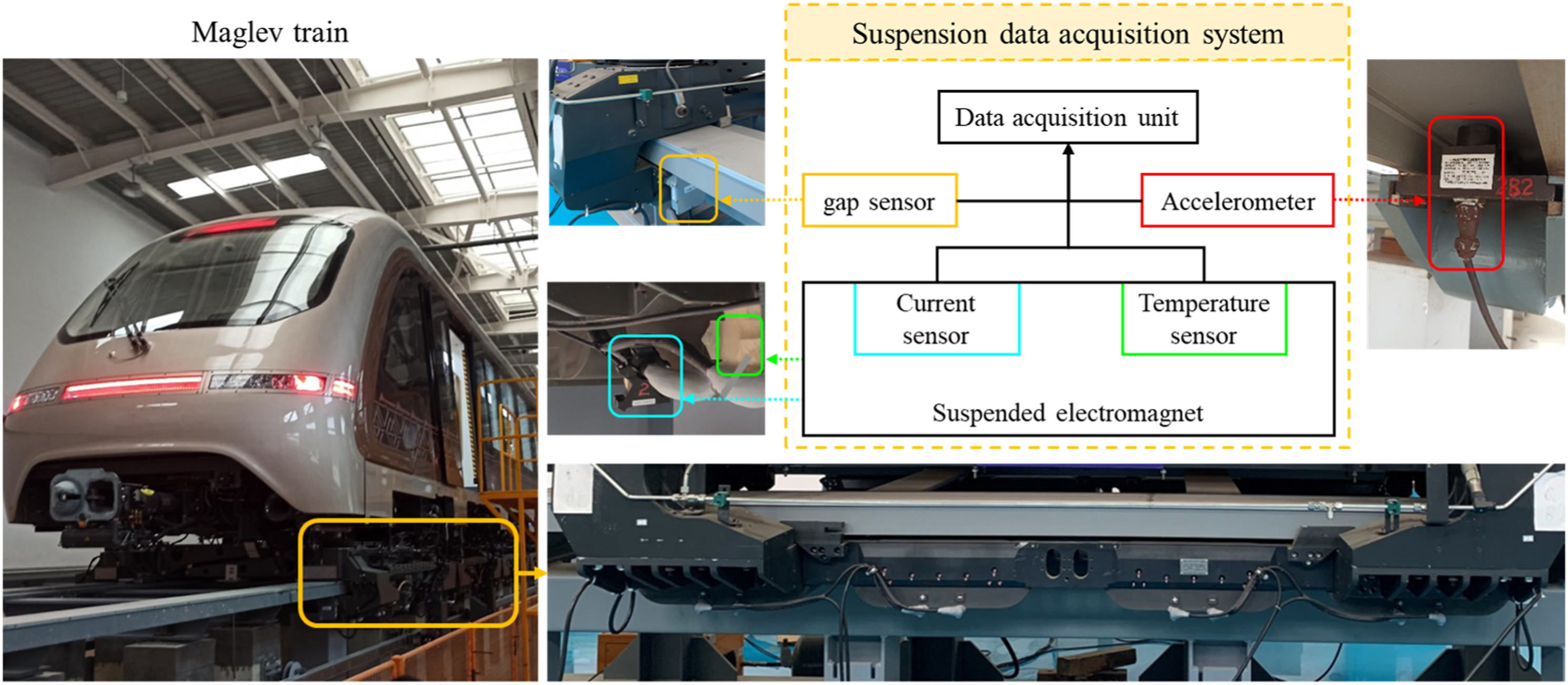
The sampling data of suspension gap, vertical acceleration and suspension electromagnet current during normal operation and stable suspension of the suspension system of Changsha maglev train are shown in Figure 4. The suspension gap operation data of Changsha maglev train contains numerous abnormal data, that is, the peaks in the suspension gap curve. This shows that the data sampled by the suspension data sampling system can well reflect the control performance of the suspension system. Among them, the suspension data sampling system can simultaneously sample four suspension gap data, and the four suspension sensors are arranged at intervals to ensure that there will not be multiple suspension sensors simultaneously sampling the data when the maglev train passes the joint. Therefore, combined with 4-way suspension gap data, a series of data preprocessing methods can well eliminate the error data sampled when passing through the track joint. As shown in Figure 4. Sampling data of suspension system of Changsha maglev train operation (left), distribution histogram of sampling data of suspension gap of suspension system of Changsha maglev train operation and its probability density fitting curve (right).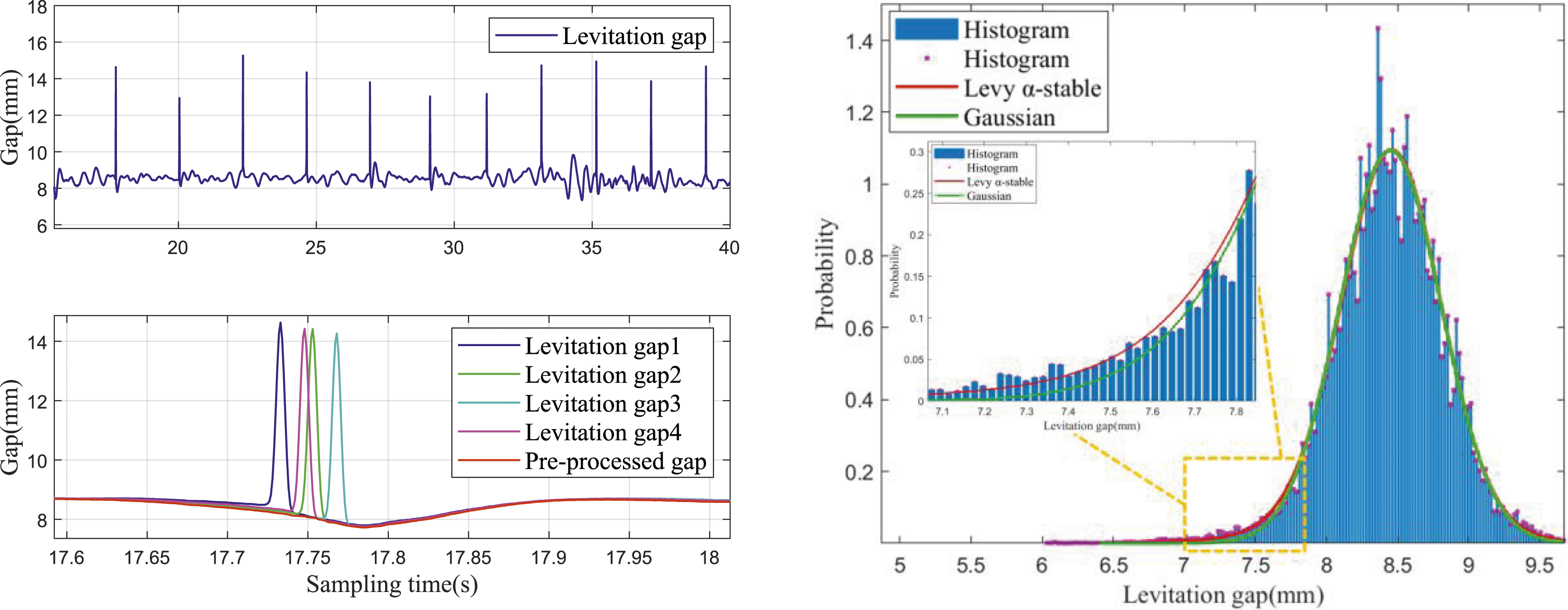
It can be seen from the right figure of Figure 4 that in the central bell curve area, the operation suspension gap data of maglev train suspension system on the on-site commercial operation line can well fit the Gaussian distribution and α-stable distribution. In the area far from the central bell curve, the traveling suspension gap data can still well obey α-stable distribution, the operation suspension gap data cannot well obey the standard Gaussian distribution, which also shows that, Gauss theory cannot well explain the relatively rare events with high probability of occurrence.
Performance evaluation Method analysis
The performance evaluation of the control system is to reflect the current operation status of the control system through quantitative indicators. In the design and commissioning stage of the control system, reasonable performance indicators can provide guidance for the commissioning of the controller and provide suggestions based on performance requirements for the design of the controller. In the maintenance stage of the control system, the maintenance personnel can take corresponding maintenance measures in time for the system with poor performance.
The traditional research on control performance evaluation originated from the industry and started from the analysis of SISO control loop. In the early stage, the step response method was usually used. The method based on the step response of the set point provides generally accepted reference indicators such as rise time, stability time, steady-state error and overshoot. 12 However, this method needs to add external disturbance during the performance test, which may bring risks to the control system. In addition, this method usually uses loop step or pulse response measures. In order to obtain appropriate step response characteristics, it is generally necessary to carry out field tests in a wide frequency range, but rarely analyze and derive the step response, and the loop should also be excited in a wide frequency range, which is difficult to achieve in normal closed-loop control system operation.
At present, the research of control performance evaluation mainly focuses on the method based on control error. For example, the evaluation methods based on integral measurement indicators, namely mean square error, integral absolute error, integral time absolute value, integral of square time derivative of the control input. However, the disadvantage of this kind of control performance evaluation method is that it can only get the relative control performance evaluation results, and cannot provide the gap between the performance of the control system and the best or designed performance.
The most widely used performance evaluation method of control system is the minimum variance method.
4
This performance evaluation method has been well applied in business and formed mature business application software packages and solutions. The standard form of the minimum variance index proposed by Harris is
According to the research of, 3 for the control system subject to non-Gaussian disturbance, the evaluation result obtained by using the minimum variance control system performance evaluation method based on the assumption of Gaussian disturbance characteristics is inaccurate. Because the mean and variance cannot fully reflect the characteristics of the control system. Therefore, the concept of entropy is introduced to characterize the uncertainty of the output tracking error of the control system. In stochastic systems, entropy is widely used, but the application research in control performance evaluation is relatively small. Jiang's new lower bound based on minimum entropy provides a new way to evaluate the control performance of non-Gaussian interference. 13 Therefore, this paper designs a new benchmark based on minimum entropy to achieve the performance evaluation of control systems with non-Gaussian characteristics.
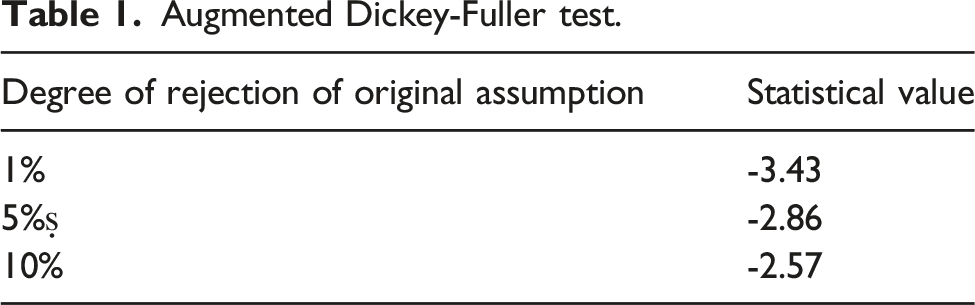
Consider the suspension gap time series data as shown in Figure 4, the difference method and smoothing method are used to realize the stability of the data. The current mainstream of the hypothesis test method for stationarity is the unit root test, which tests whether there is a unit root in the series. If there is a unit root, it is a non-stationary series, and if there is no unit root, it is a stationary series. The ADF test (Augmented Dickey-Fuller test) is one of the most commonly used unit root test methods. It determines whether the sequence is stable by checking whether there is a unit root in the sequence. The ADF test is a stationarity test applicable to the high-order autoregressive process, which Dickey introduced a higher order lag term into the DF test based on the basic characteristics of non-stationary series in 1984.
Augmented Dickey-Fuller test.
Control performance evaluation algorithm of the maglev train levitation system.

Aiming at the suspension gap data that does not obey the normal distribution, the minimum variance index is calculated by using the parameters in the established ARMA model to evaluate the performance of the control system. Select four groups of suspension gap time series data, as shown in Figure 5, and the minimum variance Four groups of suspension gap time series data.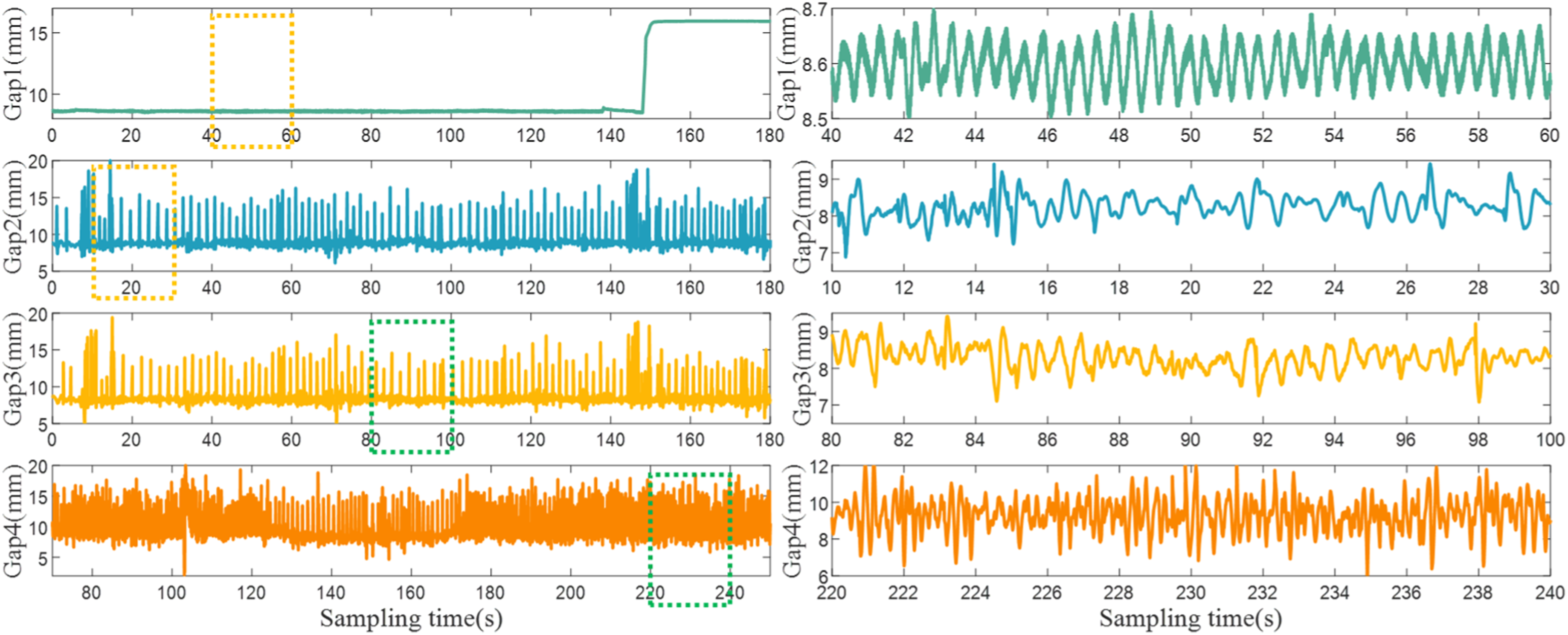
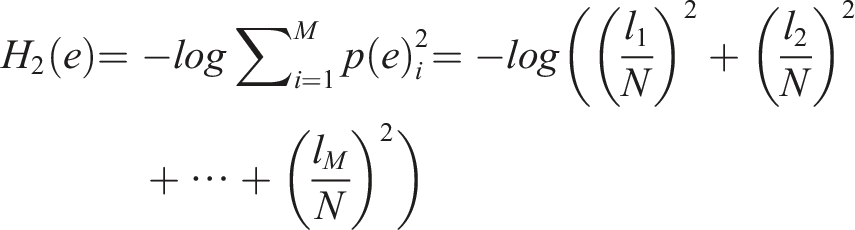
In most industrial control processes, due to the complex control process mixed with Gaussian interference and other interference factors, the calculated performance indicators often have deviation. Chen proposed a performance evaluation index of cascade control system under unknown disturbance distribution based on information theory and minimum entropy criterion, which is different from the minimum variance performance index for the control system disturbed by non-Gaussian distribution. 14 The control performance evaluation method based on minimum entropy index and Renyi quadratic entropy has also attracted people's attention.15–17 In the control system, entropy is introduced to characterize the uncertainty of output tracking error, which is only determined by the shape of distribution.
The goal of this paper is to establish the control performance evaluation benchmark of maglev train suspension system according to the minimum entropy method, so as to solve the control performance evaluation problem of maglev train suspension system under non-Gaussian disturbance.
Control performance evaluation of maglev train suspension system based on minimum entropy
Minimum information entropy
Information entropy usually refers to Shannon entropy, which is a unified probability index that can quantify uncertainty and characterize the control stochastic performance of the control system. Assume that the linear system
The optimal information entropy can be calculated according to the following steps. The tracking error of the linear control system is defined as

The probability distribution function of tracking error is

New performance evaluation benchmark based on minimum entropy
Considering the SISO control system, it can be obtained according to the ARMA model

when x is a random variable, there is
for two random variables x and y, entropy Therefore, 


Performance evaluation of suspension system based on minimum entropy
In this section, a data-driven minimum entropy performance evaluation index is designed for the suspension system under non-Gaussian disturbance. Considering the SISO control system, assuming that each element in the disturbance sequence is bounded and independent, according to the performance evaluation method of feedback control loop based on minimum entropy proposed by Jiang et al in reference 13, the nonlinear object is described as an autoregressive nonlinear moving average process with disturbance input


The new control performance index becomes the ratio of minimum information entropy input and quadratic Renyi entropy of output. The smaller the index, the better the control performance of the system. The minimum variance control performance evaluation method is based on continuous random variables, while the minimum enterprise control performance evaluation method is based on discrete random variables. The control performance evaluation index can be used in non-linear processes and non-Gaussian disturbances case. In addition, the delay need not be obtained as a prior knowledge, which makes the index easier to use than Harris index.
Experiment on control performance evaluation of suspension system of maglev train
Aiming at the control performance evaluation of maglev train suspension system under non-Gaussian disturbance, a data-driven minimum entropy performance evaluation index is designed in this paper. Among them, the estimation of noise sequence is very important for the calculation of minimum entropy performance index. Because the control delay of maglev train suspension system is unknown, the algorithm shown in Table 2 is designed to calculate the minimum entropy control performance evaluation index of maglev train suspension system in steady state (Table 2).
First of all, collect the levitation data of the normal conducting medium-low speed maglev train in the steady state of operation, then process the levitation gap sampling data according to the steps of the above algorithm, and calculate the minimum entropy control performance evaluation index. Finally, combined with the minimum entropy control performance evaluation index, carry out the control performance evaluation research for the levitation system of the maglev train. Preprocess the suspension gap sampling data to obtain the gap tracking error, and fit the PDF of the gap tracking error according to the α-stable distribution, as shown in Figure 6. Tracking error data curve of suspension gap sampling data (left), The PDF of tracking error of the levitation gap (right).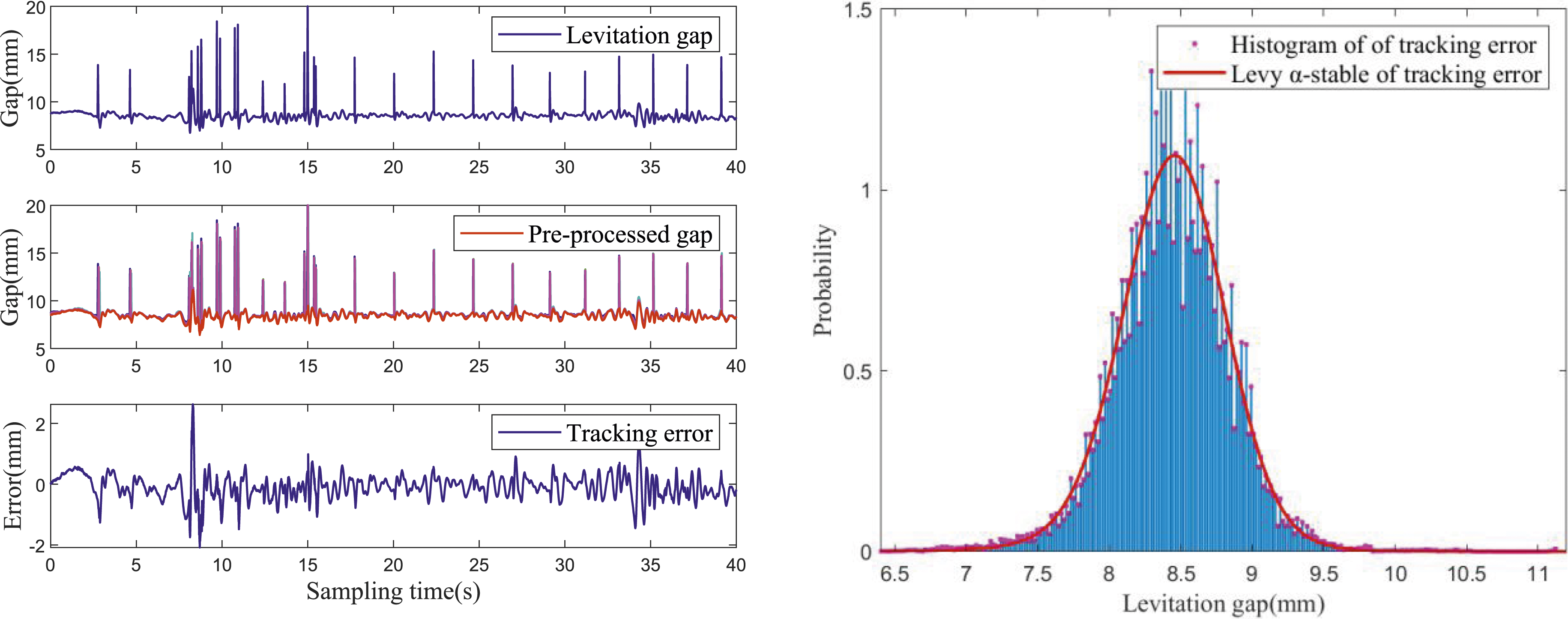
Comparison of control performance evaluation results based on minimum entropy and minimum variance.

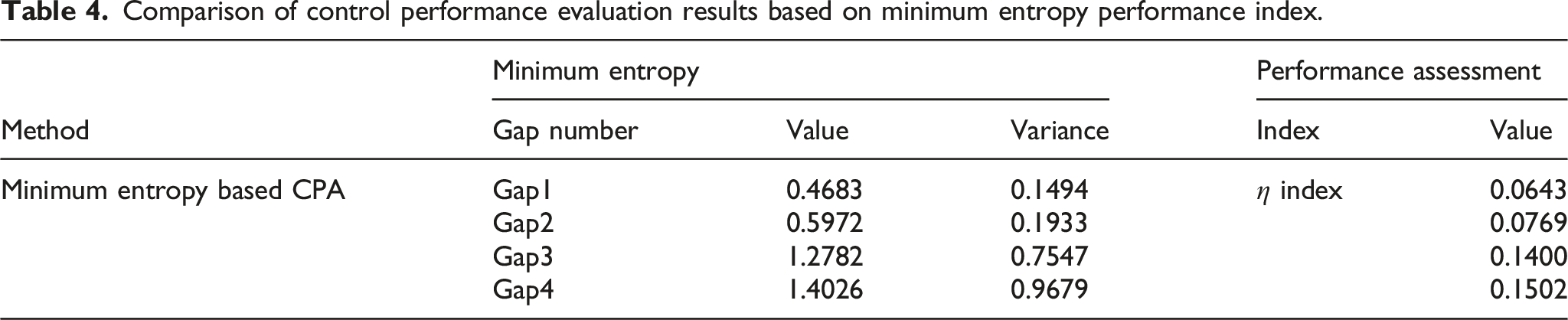
In this section, to further analyze the performance evaluation effect based on minimum entropy, four sets of gap data corresponding to different control performance of the Changsha maglev train suspension system were collected and processed accordingly, as shown in Figure 7. Then, based on the algorithm designed in this article, the minimum entropy control performance index is calculated separately, as shown in Table 3. According to the analysis in Table 3, when the control performance of the suspension system decreases, the minimum entropy control performance index designed in this article will increase accordingly. The experimental results demonstrate that the minimum entropy control performance index can effectively describe the changes in control performance of suspension systems in non-Gaussian disturbance environments. (Table 4) Sampling data curve of suspension system with different control performance. Comparison of control performance evaluation results based on minimum entropy performance index.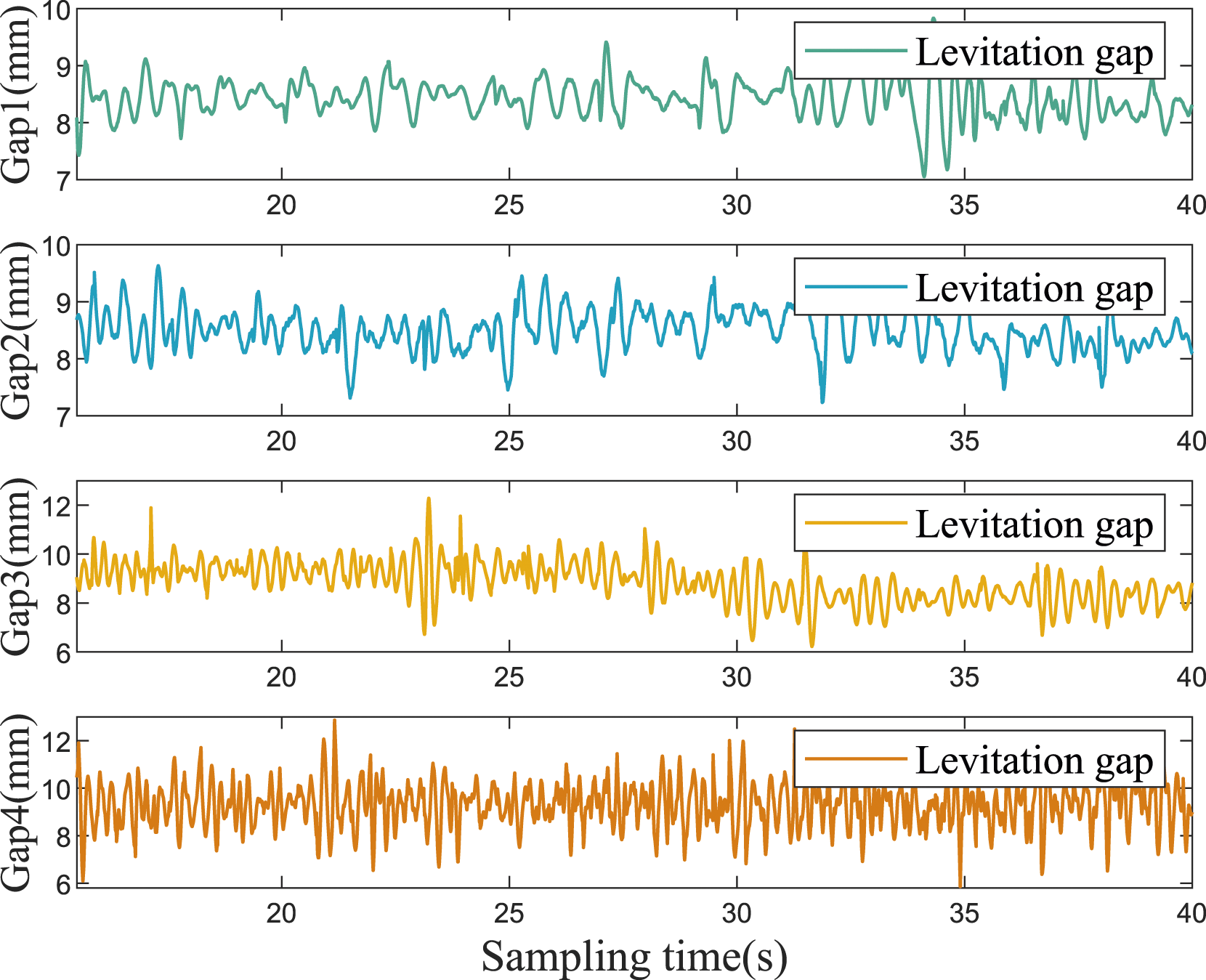
Conclusion
This paper discusses the performance evaluation method of maglev train suspension system based on minimum entropy. Combined with the operation data of Changsha maglev train, by checking different distribution assumptions, it is found that the suspension gap time series data of maglev train suspension system is more consistent with the α-stable distribution based on non-Gaussian assumption. Then the paper introduces the alternative method of control performance evaluation of maglev train suspension system in this case, that is, the performance evaluation method based on minimum entropy. Based on this method, this paper designs a new benchmark for the control performance evaluation of maglev train suspension system, and designs the calculation method of minimum entropy control performance evaluation index based on data-driven, so as to realize the research on the control performance evaluation of maglev train suspension system based on data-driven. Finally, combined with the sampling data of Changsha maglev train suspension system, the effectiveness of the minimum entropy control performance evaluation index is verified through experiments, and the control performance evaluation of maglev train suspension system under non-Gaussian disturbance is realized.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by a grant from the National Natural Science Foundation of China (Key Program, No. 52332011).