
Abstract
In this work, we have developed a serial-chain multibody model of a rail vehicle, using the Decoupled Natural Orthogonal Complement matrices. The governing equations of the system were linearized, and the start of hunting was identified by finding the Smallest Bifurcation Point (SBP) of the trivial solution. Uneven wear creates differences in the properties of similar components in a rail vehicle. It was found that such variations are neglected in the hunting analysis. Hence, we introduce these differences by independently changing 32 parameters. The study found that these variations lead to unique trends. Then, these trends were used to recommend design changes for a rail vehicle, which could be thought of, in order to improve the hunting characteristics. For this purpose, an interactive software tool was created to easily visualize, and manipulate the hunting behavior of a rail vehicle.
Introduction
Hunting is defined as the sustained oscillatory motion of a wheelset, which is caused due to conical wheel profiles. Theoretically, the start of hunting is determined by searching the function-parameter space, by varying the vehicle’s forward velocity (V). The process involves finding the speed at which the trivial solution loses stability, also known as the Smallest Bifurcation Point (SBP).1,2 SBP (denoted using V
s
) can be found using conventional stability analysis, i.e., identifying the lowest speed for which the real part of the eigenvalues, switches signs from negative to positive.
1
It is generally regarded that hunting beyond SBP is undesirable.
3
Therefore, the identification of SBP is an important part of railway dynamics. Persistent hunting vibrations occur in two distinct speed intervals.
4
Bogie/secondary hunting is when the vibrations are present only in bogie frames, and wheelsets.
5
Whereas carbody/primary hunting
6
is a parametric excitation, when a vehicle is moving, which is clear from the terms in the damping matrix
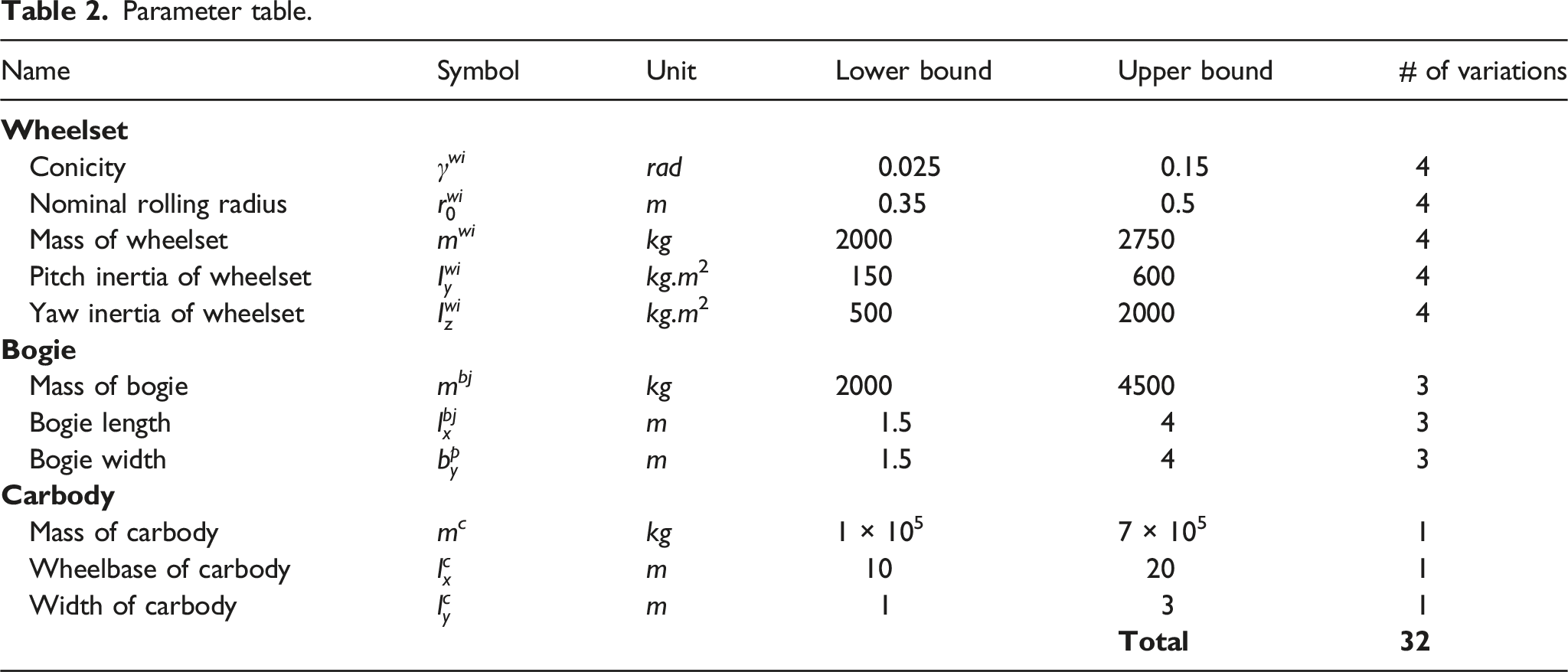
Hunting of rail vehicles is characterized using parametric analysis, by varying the vehicle properties. Note that, most of the studies3–10 assume comparable components with same properties. For example, as indicated in Figure 1, all four wheelsets in the carbody system are considered to have the same conicity, i.e., γw1 = γw2 = γw3 = γw4. While such an assumption is appropriate for an idealized rail vehicle, realistic operation conditions lead to uneven wear between the components. For instance, an unevenly loaded carbody exerts dissimilar loads on the axles. Extended operations under these conditions creates a difference in the properties of individual components. Notably, the symmetry of a rail vehicle about the YZ plane (See Figure 1) is lost, when these variations exist. It was recognized that such variations have not been studied extensively, although they may assume importance under certain conditions. Therefore, an extensive parametric study was performed, by varying the properties of individual components. Using the results, design improvements on a specific component, to achieve higher vehicle speeds, are suggested. Crucial properties of specific components that adversely effect the hunting behavior were also identified and reported. A railway carbody system (Top view).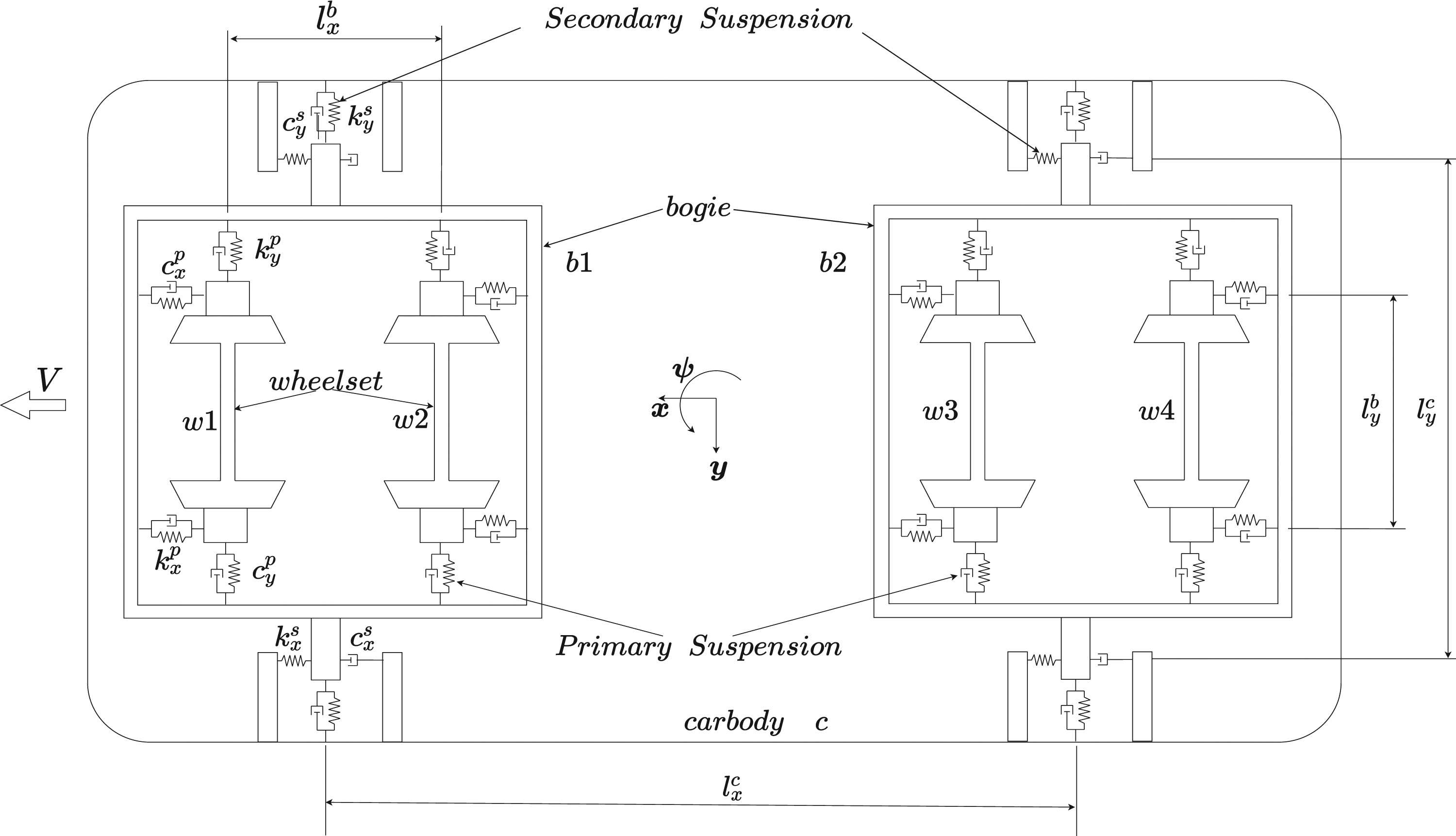
This paper is organized as follows: The next section describes the carbody model used for hunting analysis. The convention for various symbols is also explained here. Next, we describe important steps of the Decoupled Natural Orthogonal Complement (DeNOC) multibody formulation, which were used to obtain the equations of motion. Linearizations done in the multibody model, and the method adopted to find the SBP is also explained in the same section. Then, application cases used to validate our findings, as well as time response plots are shown. In the next section, we discuss the results of parametric analysis and the corresponding design recommendations. An overview of the interactive user interface for hunting analysis is given in the subsequent section. Finally, the contributions are summarized.
Carbody system
A railway carbody system shown in Figure 1 having two bogies, and four wheelsets is considered here. Its three translations are longitudinal (x), lateral (y), and vertical/bounce (z). Rotations about these axes are roll (ϕ), pitch (θ), and yaw (ψ). Two wheelsets are connected to each bogie frame through primary suspension, whereas secondary suspension links two bogies with a carbody. Each wheelset has two Degrees of Freedom (DOF), which correspond to lateral translation (y
wi
), and yaw (ψ
wi
), but the bogies, and carbody have three DOF each, which are their lateral translation (y
bj
, y
c
), yaw (ψ
bj
, ψ
c
), and roll (ϕ
bj
, ϕ
c
). In total, the carbody system has 17 DOF (2 × 4 wheelsets + 3 × 2 bogies + 3 × 1 carbody = 17). The following assumptions were made for the modeling. 1. The carbody system is considered to move at a constant forward velocity (V), about the x axis on a tangent track. Note that, 2. The system is symmetric about the XZ plane (left-right symmetry). For instance, the properties of the left, and right wheels of a wheelset are similar. 3. The wheels are perfectly conical, which means that the generator of a cone is a straight line. Wheelset rolls on knife-edge rails.
The following nomenclatures are followed throughout this paper: Bold symbols denote vectors or matrices. The main character represents the properties, such as γ for wheelset conicity, I for inertia, etc. Superscripts have two characters, in which the first letter (w/b/c/p/s/t) indicates the component type, i.e., w for wheelset, b for bogie, c for carbody, p for primary suspension, s for secondary suspension and t for track, whereas the ensuing number (second character in the superscript) represents the component number, namely i = 1, 2, 3, 4 for four wheelsets, and j = 1, 2 for two bogies. Subscripts are used to denote the axes or other relevant properties. For example,
Mathematical framework
Equations of motion
A serial-chain modeling approach using the DeNOC matrices
11
was used to derive equations of motion. Each component of the carbody system was modeled as an open-loop serial-chain system having multiple links (one each for every DOF). Figure 2 shows adjacent links in a serial-chain, which are connected through a joint at O
i
. The unconstrained Newton-Euler equations for an i
th
link in the serial-chain system are written as Adjacent links of a serial-chain multibody system.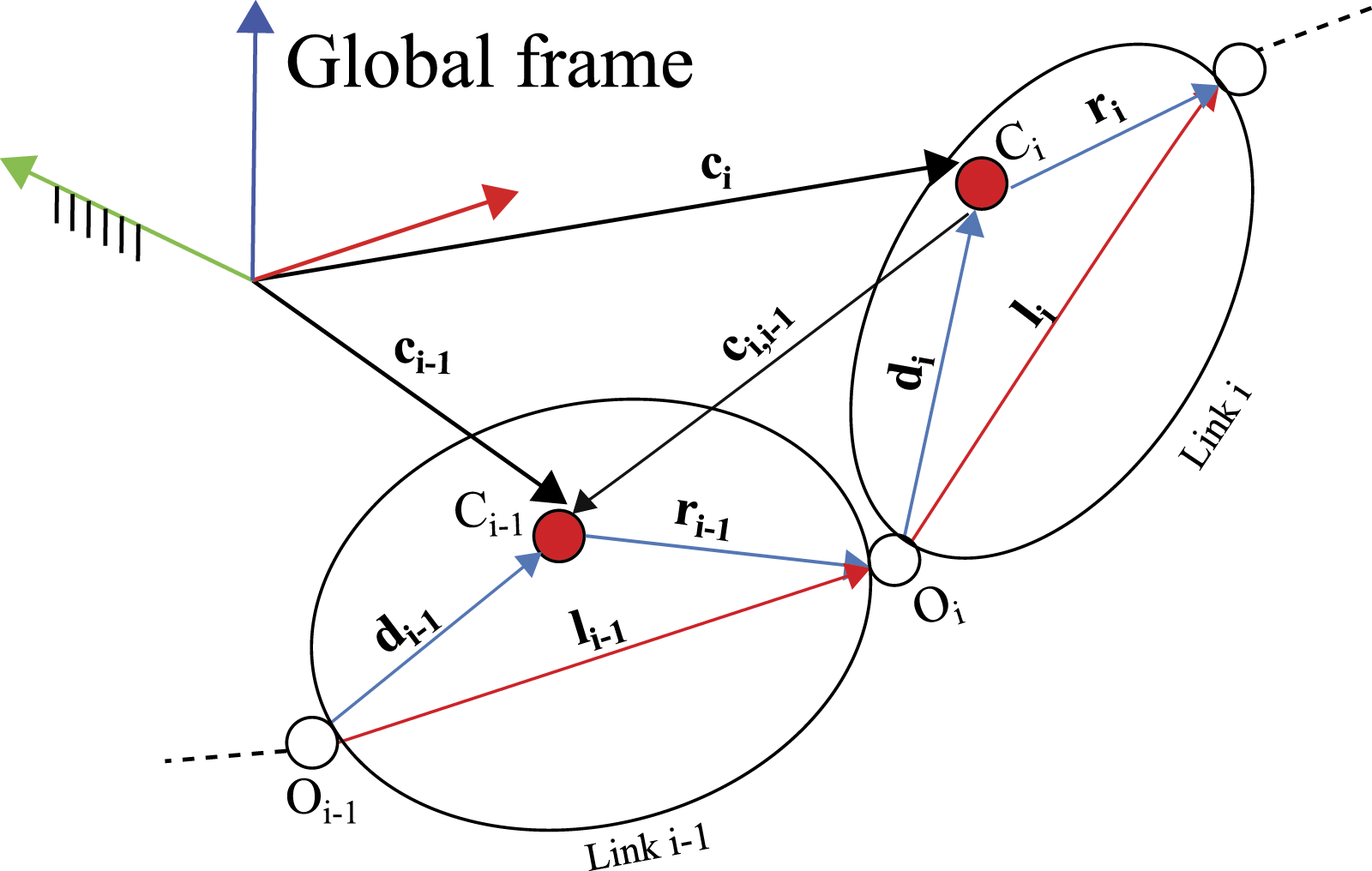

Note that, Serial-chain architecture of a railway carbody model. Wheel-rail contact pair.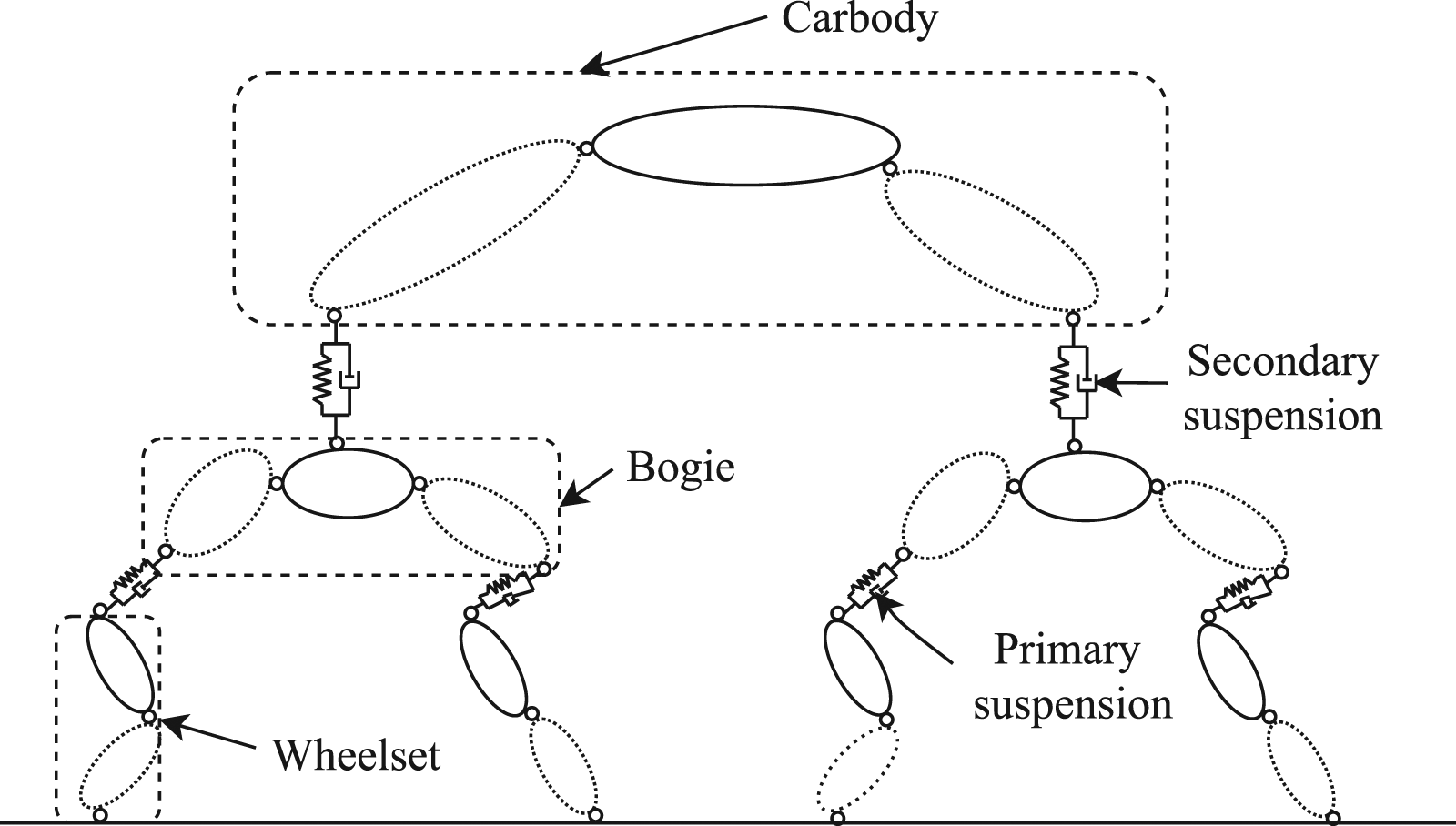





Linearization
The lateral translations (y
wi
, y
bj
, y
c
), and yaw rotations (ψ
wi
, ψ
bj
, ψ
c
) of a rail vehicle in motion is often very small. Thus, a set of non-linear ODE’s given in equation (6) can be linearized around the equilibrium point. Briefly, the product of system states, i.e, ψw1.yw1, etc., and higher order terms such as

Complete expressions for
Lyapunov’s Indirect method for finding SBP
Lyapunov’s Indirect Method (LIM)
7
asserts that, below SBP, all eigenvalues of the linear system shown in equation (7), lie in the open left-half of the complex plane. Beyond SBP however, at-least one of the eigenvalues falls into the open right-half complex plane. Following steps are used to find the SBP: 1. Linear second-order ODE’s given in equation (7) were converted to an equivalent first-order form, as given below. 2. At every iteration, real part of the eigenvalues of 3. The stability loss of the trivial solution, i.e. SBP is identified as the speed at which any one of the real part of the eigenvalues become positive.

In this work, LIM was used in conjunction with either (a) dichotomy/bisection method, (b) secant method, (c) monte-carlo method, which were commonly adopted in the literature of railway dynamics. A typical flowchart of the bisection is shown in Figure 5. Bisection method for calculating SBP.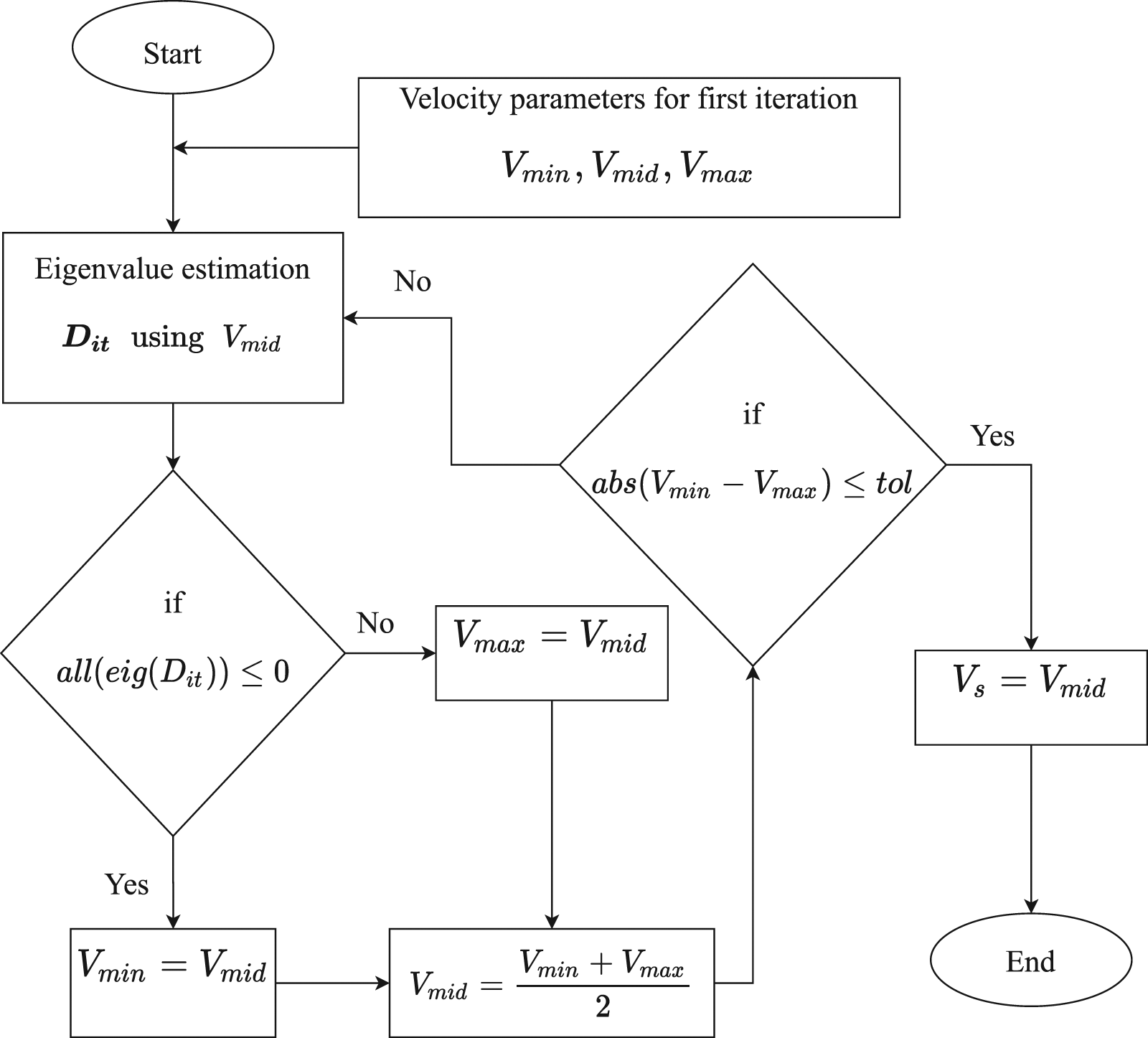
Implementation
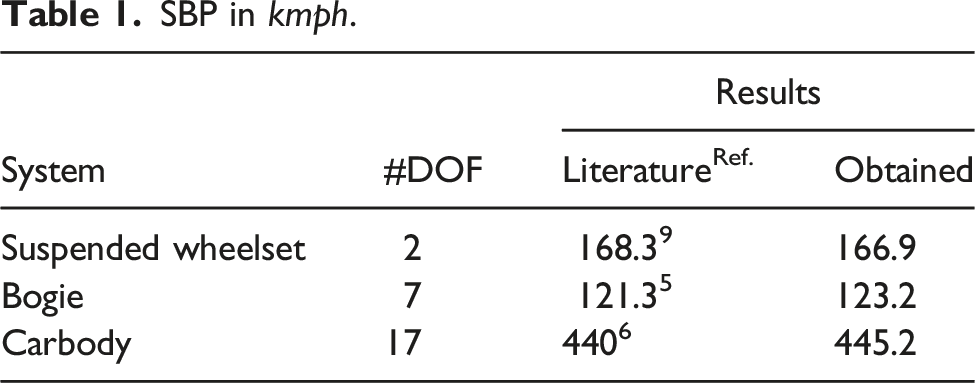
Validation
SBP in kmph.
Time response
For time integration, an initial perturbation
8
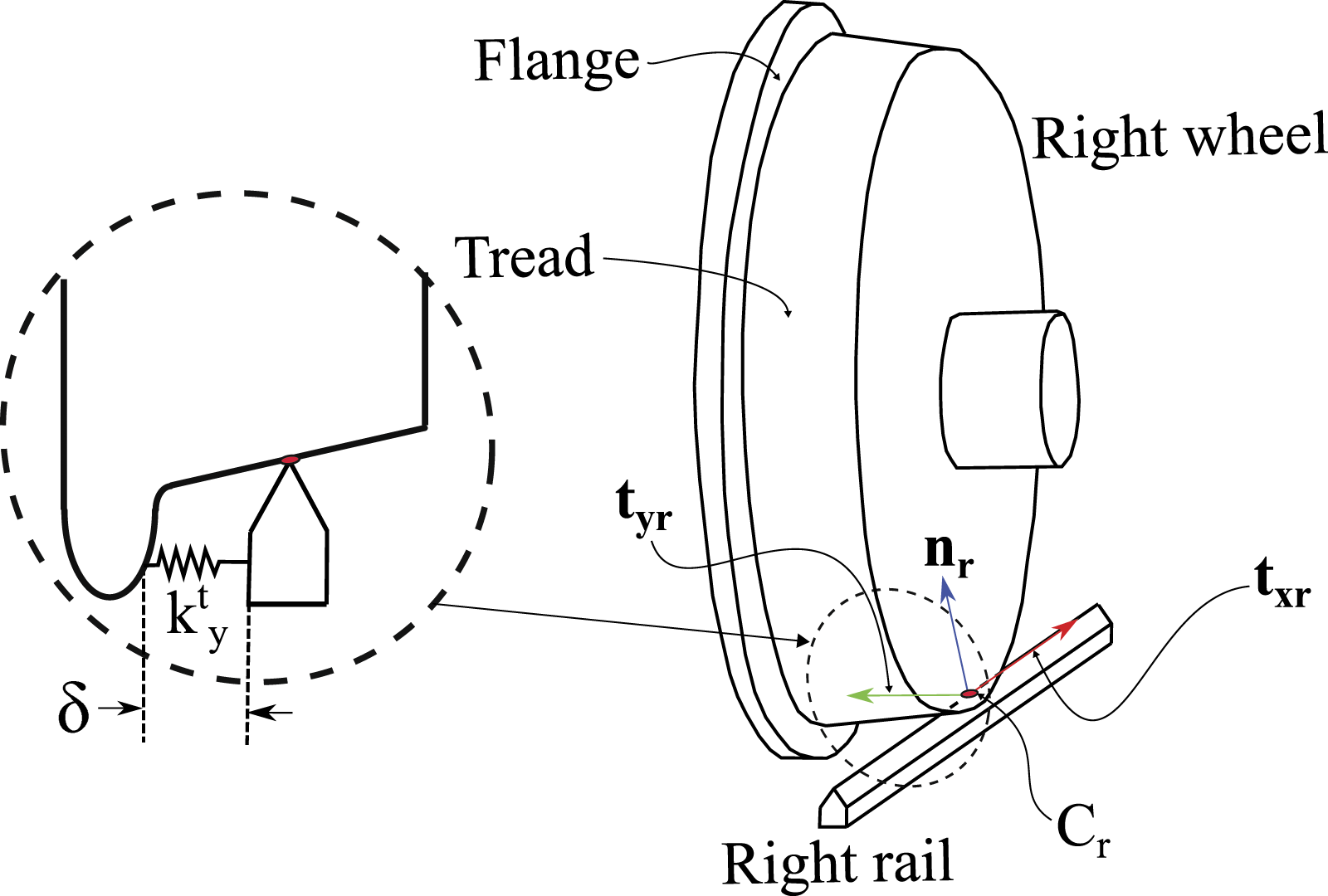
of 1 × 10−3m was applied to the leading wheelset (w1). When the forward velocity of the vehicle is less than the SBP (V = 425 kmph), as illustrated in Figure 6(a), the magnitude of hunting oscillations decay with time. Persistent hunting can be seen in Figure 6(b), when the vehicle is moving at V = 445.2 kmph, but the amplitude does not exceed the original disturbance. Finally, Figure 6(c) shows lateral translation increasing until the wheelset reaches its flange contact limit (See δ in Figure 4). This happens at speeds higher than the SBP (V = 480 kmph). Time response of the leading wheelset’s lateral translation (a) Below SBP, (b) At SBP, (c) Above SBP.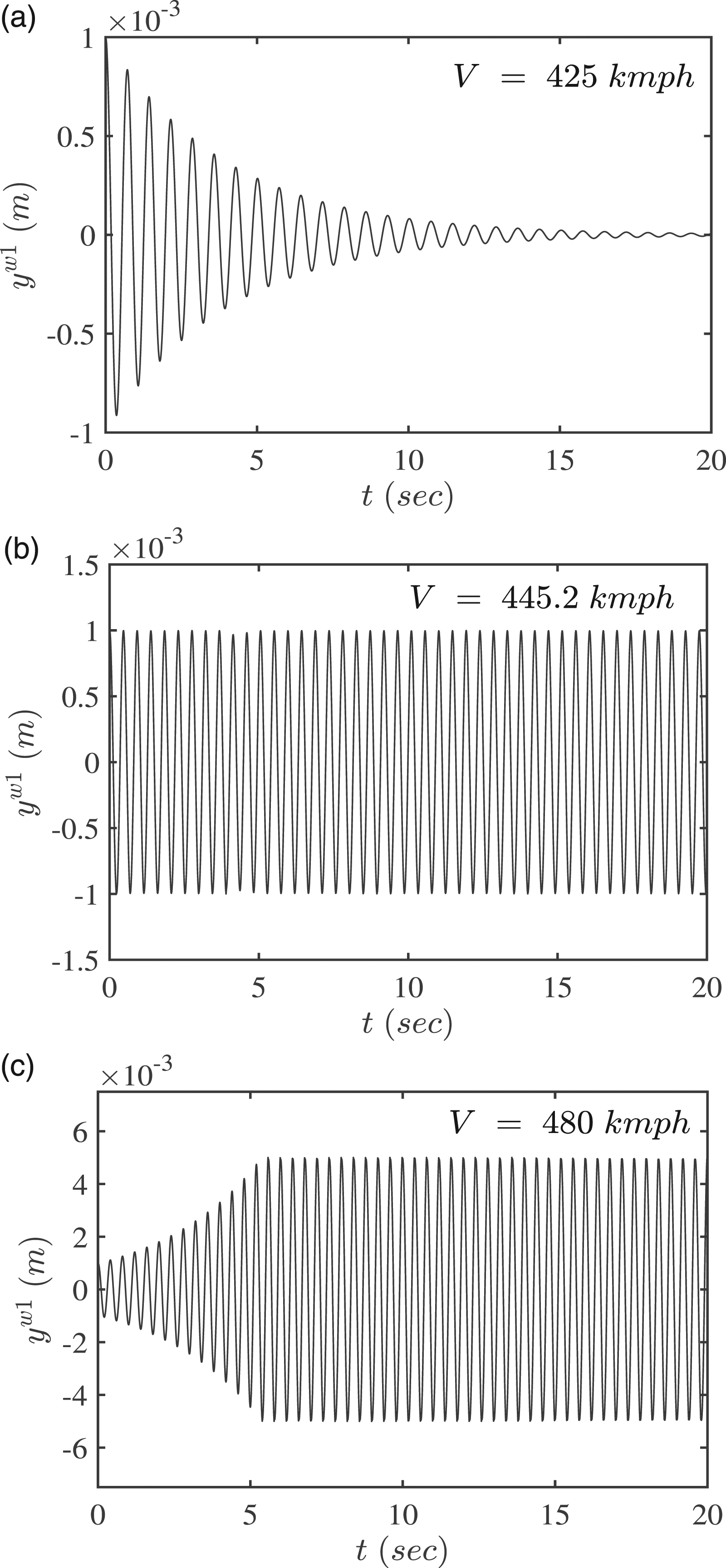
Carbody bifurcation analysis
Parameter table.
Results
Geometric properties of wheelset
From Figure 7(a) it is apparent that, with higher wheelset conicities in the leading wheelsets of both bogies i.e., γw1, and γw3, are reducing the SBP significantly, in comparison with the effect of second wheelset (γw2). On the other hand, after a slight drop, the fourth wheelset (γw4) shows an increase in the SBP. This phenomenon could be ascribed to the dominant vibration modes of the leading wheelsets. Due to constant wear, the rolling radius of the wheels changes. Variations of SBP due to change in nominal rolling radii of wheels is shown in Figure 7(b). It is clearly evident that the rolling radius of wheelsets in the trailing bogie i.e., Geometric properties of wheelset versus SBP (a) Conicity, (b) Nominal rolling radius.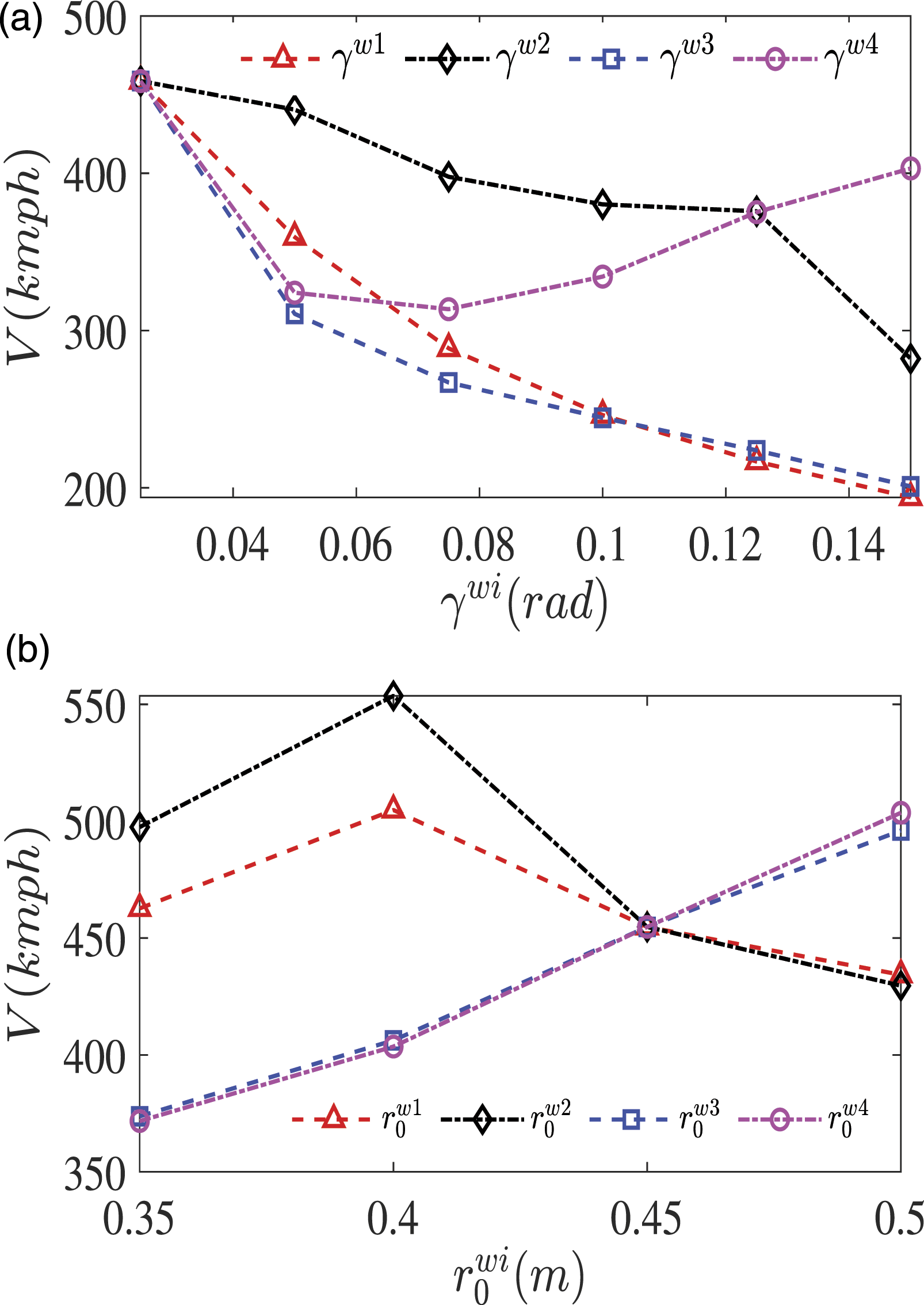
Mass and inertia properties of Wheelset
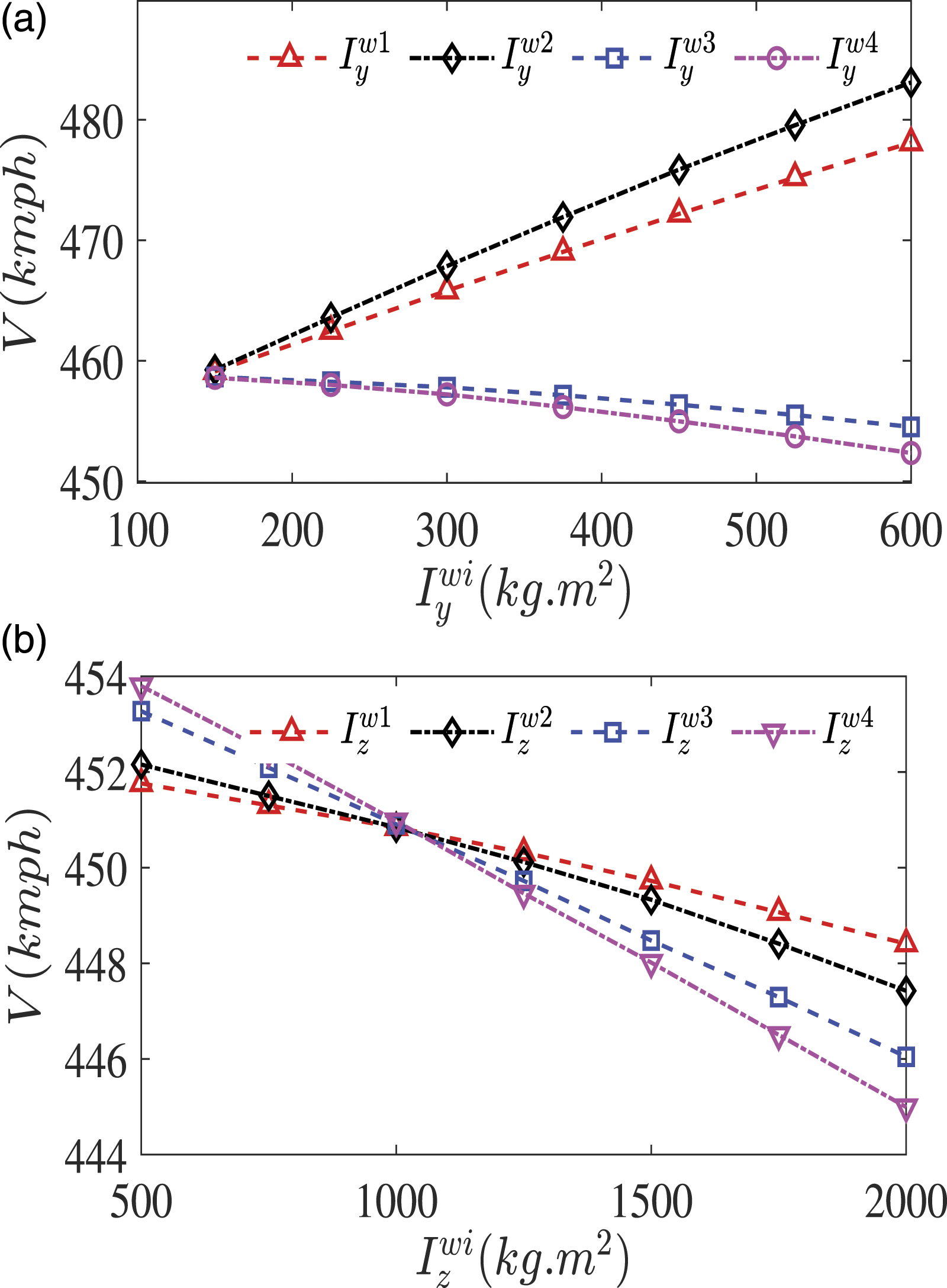
Figure 8 shows the impact of mass of the wheelset on the SBP. A lower value for SBP is observed when the heavier wheelsets are close to the Center of Gravity (C.G) of the carbody i.e., mw2, and mw3. With increased mass away from C.G, the net inertial forces resisting the hunting oscillations are high. Thus, SBP increases with increasing mass of first (mw1), and fourth (mw4) wheelset. In the case of pitch inertia of wheelset, the SBP values on the leading bogie i.e., Mass of wheelset versus SBP. Inertia properties of wheelset versus SBP (a) Pitch inertia of wheelset, (b) Yaw inertia of wheelset.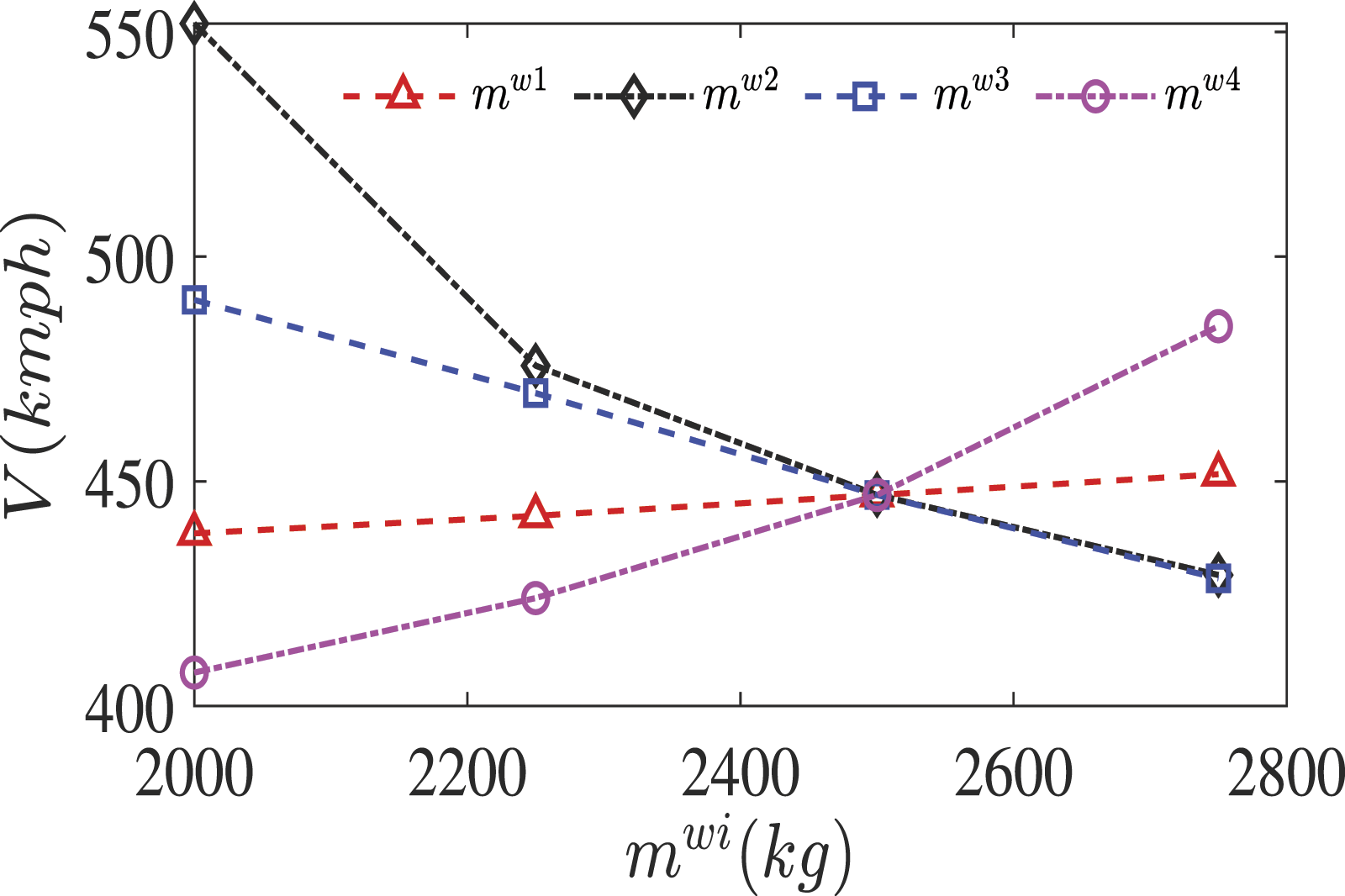
Mass of bogie and carbody
SBP of the carbody system decreases with increasing mass of the leading bogie (mb1), whereas the opposite is true for the trailing bogie (mb2). In general, increasing the mass of both bogies, i.e., mb1 = mb2 = m
b
, shown by the solid black line in Figure 10(a), there is a consistent drop in the SBP. However, this effect is marginal when compared with the leading bogie. This is depicted in the same figure using a dashed red line. On the other hand, the mass of carbody has non-linear relationship with the SBP. See Figure 10(b). The SBP is observed to drop until a threshold at m
c
= 2 × 105 kg, at which point it begins to grow steadily with increasing values of carbody mass. Qualitatively, a wagon which is rear-heavy shows greater resistance to hunting phenomenon. Mass of bogie and carbody versus SBP (a) bogie mass, (b) carbody mass.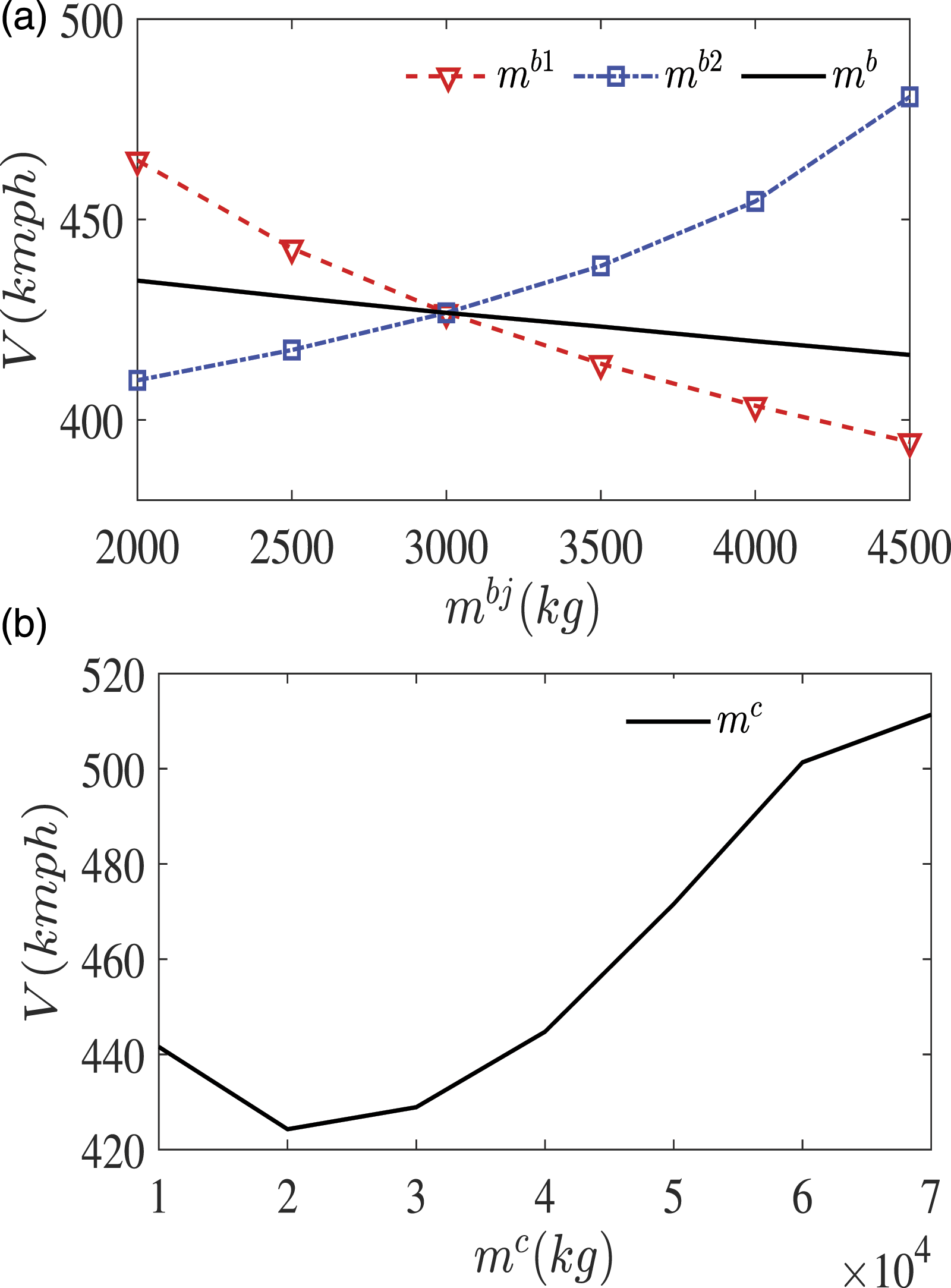
Bogie dimensions
The length or wheelbase of the bogie, denoted as Dimensions of bogie versus SBP (a) Bogie length, (b) Bogie width.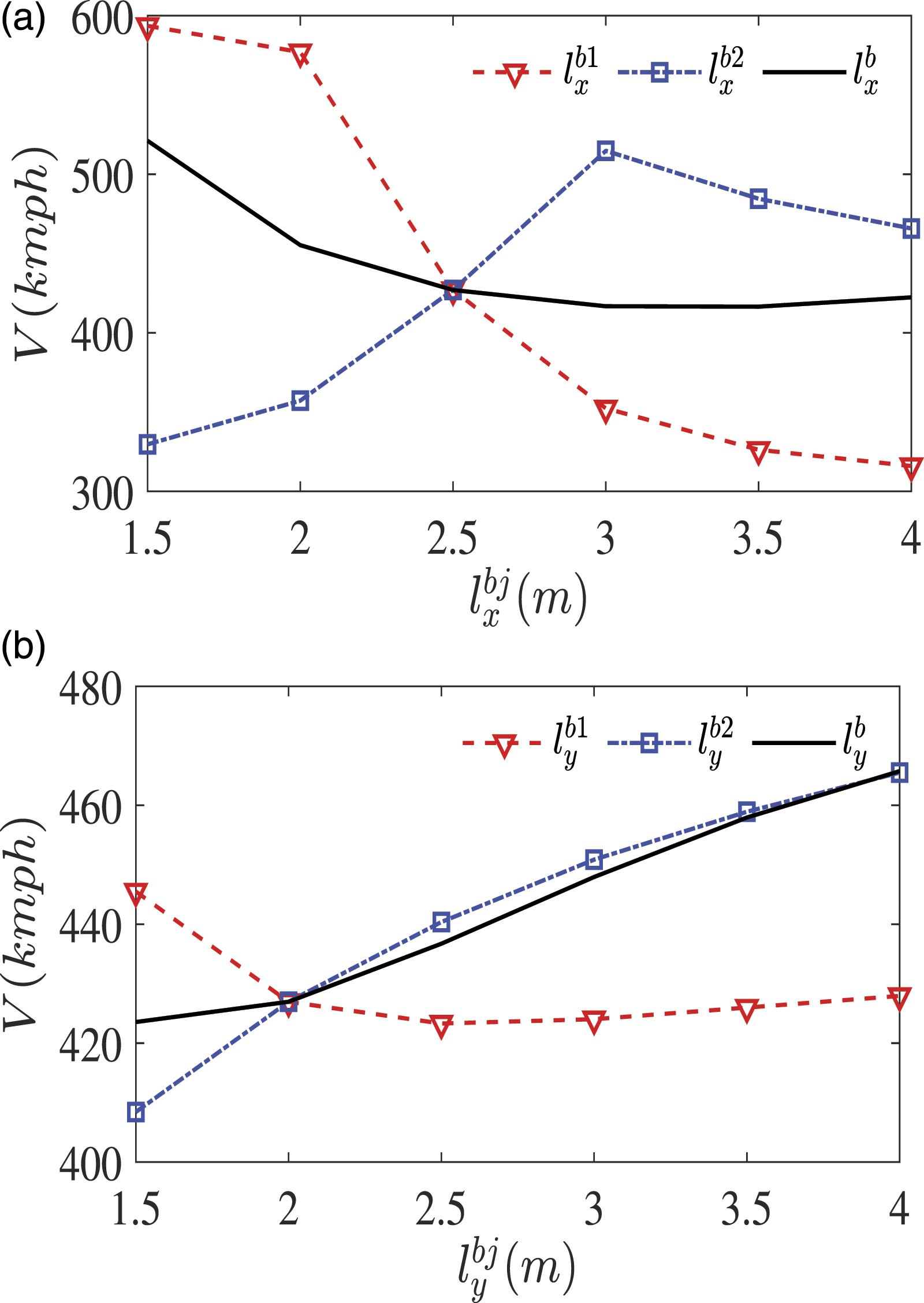
Carbody dimensions
The length Dimensions of carbody versus SBP (a) Carbody length, (b) Carbody width.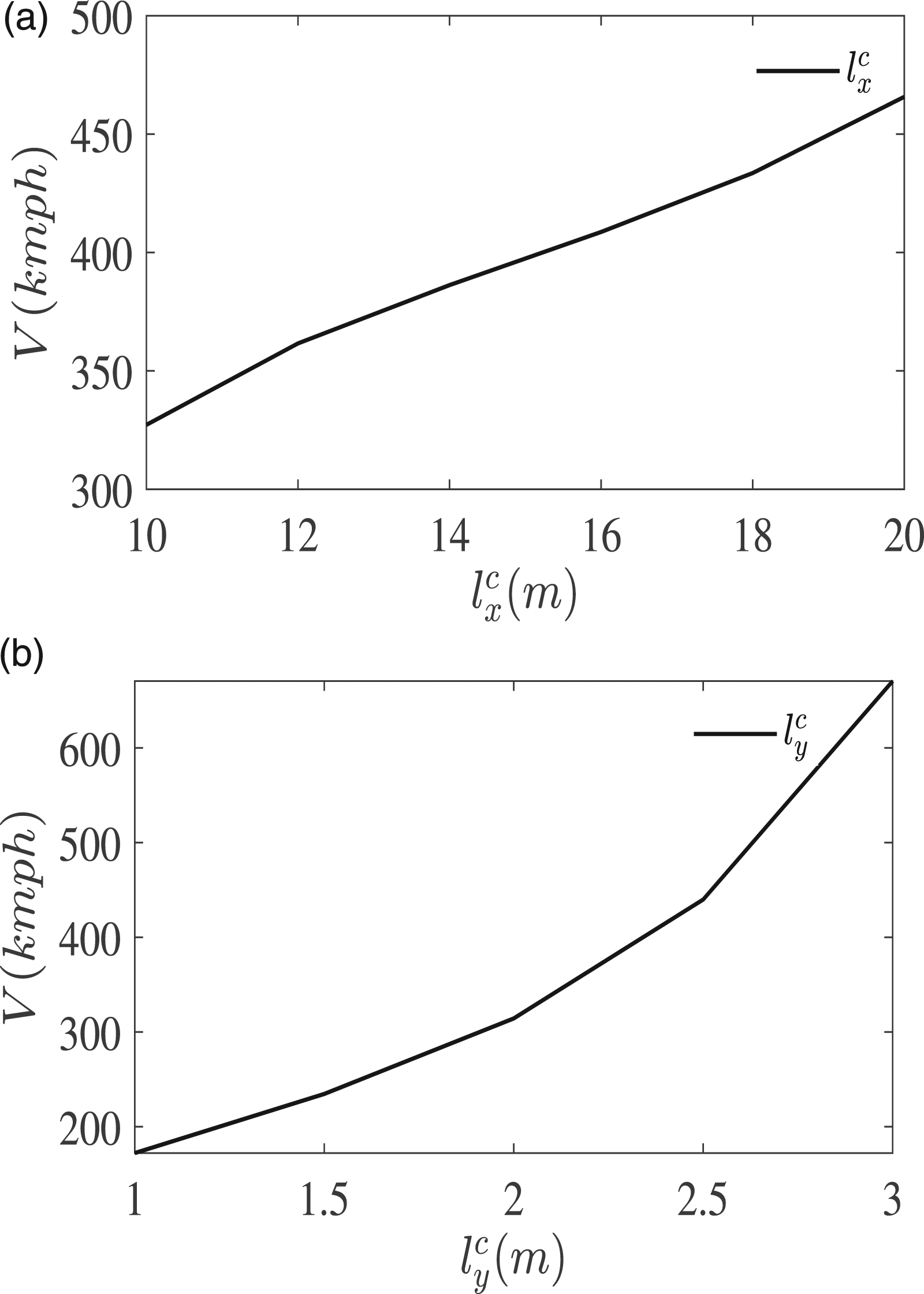
Design recommendations
It is not necessary that the carbody be essentially made non-symmetric in order to take use of these variances. However, whenever variations exist within the system, they can be directed to achieve higher SBP speeds, which could help to improve the hunting behavior of a rail vehicle. In light of this, these suggestions should be considered. Based on the results, recommendations for improved vehicle speed are summarized below: 1. Worn-wheelsets often have high conicities, which makes them start hunting starting at lower speeds. Thus, frequent re-profiling of especially the leading wheelsets is essential, since they provide help increasing the SBP. 2. Larger wheelsets (that is wheels with a higher rolling radius) are preferable for the rear bogie, whereas small wheels can be chosen for the front bogie. 3. Increased rolling radius results in increased pitch inertia of a wheelset. Hence, a trade-off is required to balance the contrasting effects of rolling radius, and the pitch inertia, see Figures 7(b) and 9(a). 4. Heavier wheelsets should be located well away from the carbody C.G, whereas light wheelsets should be close to the carbody C.G, as seen in Figure 8. 5. A straightforward explanation of wheelset’s yaw inertia is possible using Figure 9(b). Small wheels at the front part of the carbody (i.e., small portrait on the XY plane) enhances resistance to hunting oscillation. 6. Lighter bogies are conducive for improving the vehicle speeds. This is very similar to road vehicle dynamics,
17
where it is demonstrated that lower unsprung mass results in a better ride quality. 7. Due to enhanced resistance to hunting stimulation, heavier carbodies have higher SBP. However, the associated inertial forces may affect the carbody system differently in case of motion on curved track. 8. In general, a lower length-to-width ratio 9. Increased length and width of carbody is suggested to achieve higher vehicle speeds. This too relates to road vehicle dynamics, as large vehicles usually tend to exhibit better ride quality than shorter vehicles.
17
Railhunt - an interactive tool for hunting analysis
For parametric studies, a Graphical User Interface (GUI) called ‘Railhunt’ (see Figure 13) was developed in Matlab’s app designer®. In Railhunt, the user can create, modify and store different railway carbody models in XML files. Parameters under study can be independently varied by setting lower bound, upper bound, and sampling intervals. Apart from that, one can also select from a catalog of pre-defined solvers and also be able to change solver settings. The post-processor of Railhunt allows users to superimpose multiple result sets. Using this interactive GUI, SBP trends can be understood easily. Railhunt - Hunting analysis tool.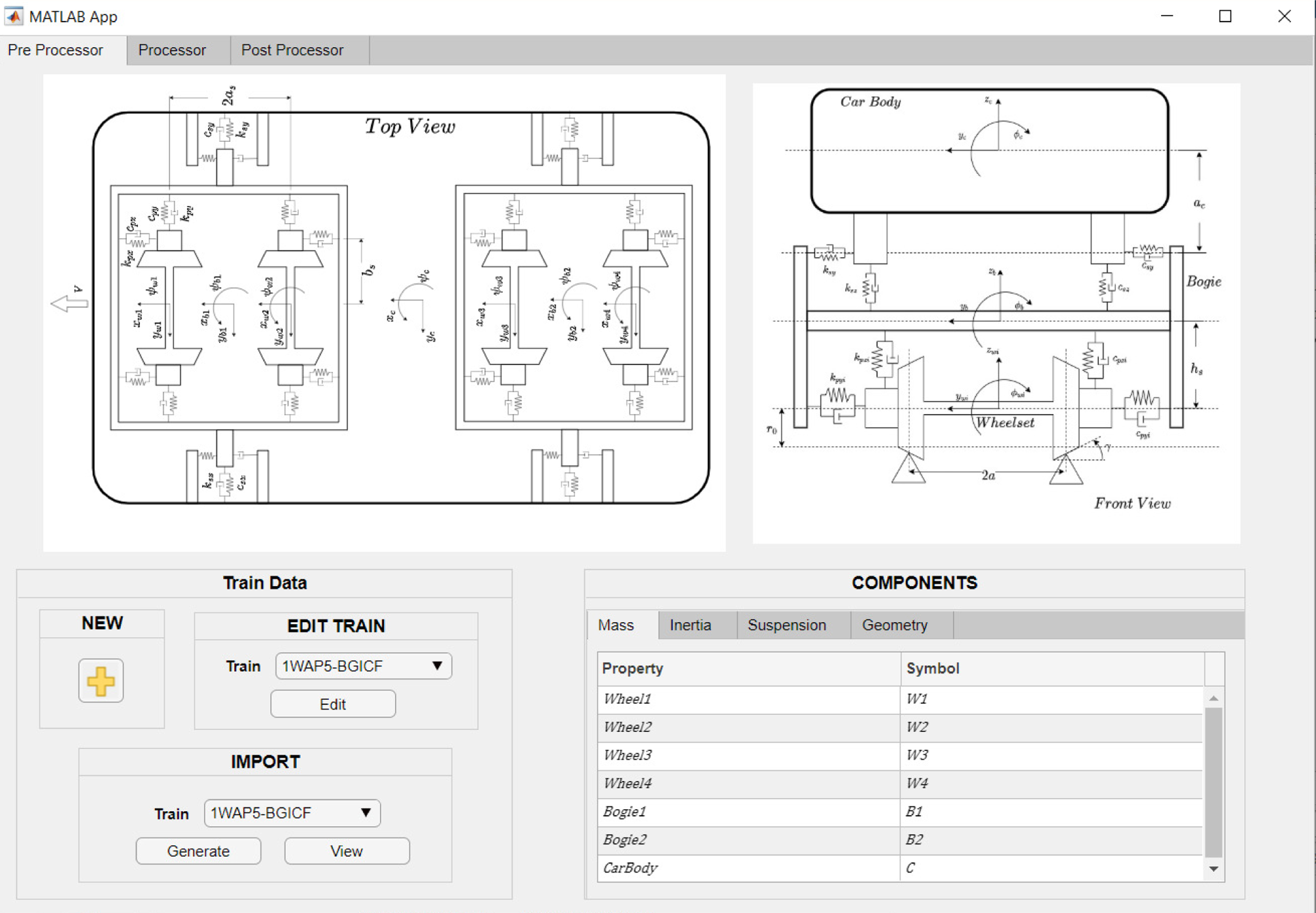
Summary and conclusion
A serial-chain multibody model of a railway carbody system having two bogies, and four wheelsets was developed. The governing equations of motion of this system were obtained using the DeNOC matrices. The start of hunting was identified by finding the Smallest Bifurcation Point (SBP) of the trivial solution, and our results were validated with those given in the literature.5,6,9 SBP trends were then investigated, by altering the attributes of individual components of a carbody system. Unlike many prior publications, which focused extensively on suspension properties, this paper illustrates the effects of geometric, mass, and inertia properties. Using these trends, it was feasible to systematically comprehend the crucial aspects of rail vehicle design that affect hunting characteristics. Accordingly, design proposals to achieve SBP at the highest speed possible, are given. For this purpose, an interactive tool called Railhunt was developed using Matlab’s app designer®.
Footnotes
Acknowledgements
The author(s) would like to thank Mr. Rajeevlochana G Chittawadigi for giving his opinions while preparing figures, and plots in this paper. The author(s) also thank Mr. Sreejath, and Mr. Alinjar Dan for proof-reading this paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Appendix
Symmetric elements of
Symmetric terms of
Non symmetric terms of
Note that,