
Abstract
Vehicle towed trailer accidents can cause significant accident damage, often due to poor user training and a reliance on a user knowledge of the centre of mass of the trailer and correct loading. The accidents affect surrounding road users and are exacerbated by wind, vehicle speed and road surface conditions. When the trailer centre of mass lies behind the wheel centreline, instability may occur with small driver inputs, causing exponential growth of the trailer yaw rate. Current automotive vehicle trends include wider and longer wheelbases, which can require rear-wheel steering to minimise the turning circle. As an adaptive safety feature for towing vehicles, this paper provides simulation results demonstrating that small rear-wheel steering inputs mitigate user loading error, generating a stable towing platform, with modifications only to the tow vehicle. Here, a three degree of freedom, two platform vehicle model is used to demonstrate the instability criteria for both a good and poor user loading case. A simple control gain to rear-wheel steering is used to augment the front wheel steering, causing the instability to become controllable under more extreme conditions than typically investigated. A Simulink model of a vehicle with a single axle trailer is generated with increasing forward speeds between 20 and 60 m/s where steering perturbation is applied with varying trailer centre of mass position. Critical stability is shown and the rear-wheel steering extends the stability criteria measured with both damping ratio and overall amplitude of hitch angle. A trailer centre of mass divided by the trailer length of −0.1 is unstable but is corrected with proportional rear-wheel steering. Even with a value of −0.14, the rate of growth of the instability is so reduced that a driver can take corrective action safely.
Keywords
Introduction
The incidence of accidents involving automotive vehicles towing trailers are lower than for general road vehicles, 1 but when snaking or swaying 2 occurs the overall impact is severe 3 and can involve impact out of lane, spinning or overturning. A greater number of tractor-trailer movements is taking place, with an increase in the number of accidents as well. 4 The impact of these accidents is more significant due to two large coupled masses being involved, yet additional training is not necessarily required (implying a causal link).2,3,5,6
One of the main functional requirements of an automotive vehicle is the towing capacity, yet the well recognised stability problem relies on the correct loading distribution of trailer mass with respect to the axle position and critical vehicle speed, thus is a coupled dynamic problem, 7 well recognised for decades as snaking or swaying. 2 Given this, vehicle manufacturers look for control capability improvements which increase coupled safety and are only applied to the towing vehicle. This has the double benefit of adding desirable safety features to the vehicle and increases the tolerance of user loading errors on the coupled system. However, existing designs are largely focused on active trailer steering control and adaptive trailer braking2,8 as hitch damping, self-steering are inadequate, also requiring connections to pass information to the vehicle. 2
A consequence of inappropriate trailer loading is that for slight changes in the centre of mass (CM) location relative to the trailer axle, or moment of inertia relative to trailer length, or changes to the critical speed, the system becomes unstable and catastrophic yaw angles can result. These changes that a customer makes are independent of the towing vehicle control system, yet vehicle capability improvements are what can be introduced to mitigate the dynamics and thus the accident risk.
One significant change in vehicle dynamics is the increasing number of all-wheel steering vehicles (rear-wheel steering), which align with larger wheelbases and vehicle lengths needing to fit within existing turning circles 9 for urban driving with associated advantages for vehicle dynamics. 10 The complexity of the rear-wheel steering at different speeds, rates has been recognised and addressed by manufacturers. 11
In this paper, novel vehicle capability improvements (with towing stabilisation) are demonstrated using four-wheel drive powertrains and the presence of reverse parking sensors or cameras to measure the yaw angle of the trailer relative to the vehicle. Often, the method of generating the trailer states are left undefined, 3 whilst experiments often use draw string sensors. 5 A simple proportional controller for the rear-wheel steering is shown to drastically improve the driver control for poor trailer loading locations. These improvements in fault tolerant vehicle control will be critical for autonomous driving modes while towing. Just from using simple proportional rear-wheel steering relating to the hitch angle, the tolerance of inappropriate rearwards loading, including aerodynamic loading is extended well rearwards past the axle position. This novel demonstration can entirely be implemented on the tow vehicle, a functional safety improvement. A further advantage of the method shown in this paper is that the standardised towbar interface and ball joint system does not need to be modified (e.g. yaw dampers). Separation of the trailer state in terms of path planning and steering instead of unstable oscillation is obtained through suggested wavelet analysis or Fourier transforms applied to the hitch angle (difference between vehicle and trailer yaw), as the dangerous oscillations have a frequency content greater than 0.5 Hz.
The single axle trailer is illustrated in Figure 1 where the horizontal centre of mass position (non dimensionalised by trailer length) is denoted by
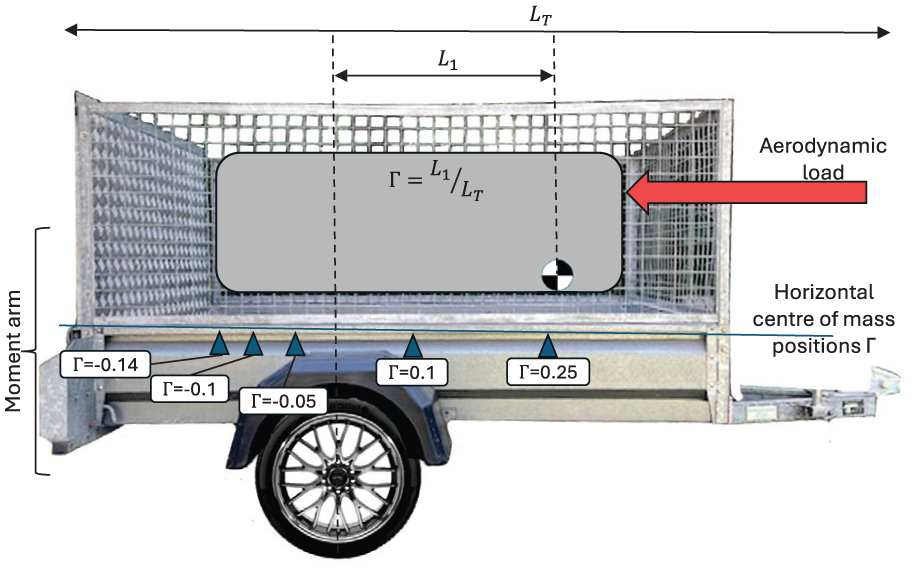
Illustration of the single axle trailer with the range of horizontal centre of mass positions considered in this paper.
The positions of the centre of mass position
In this paper, a drastic rear position will be used to emphasise the ability of simple rear-wheel steering on the vehicle to provide a driver enough control authority to prevent an accident.
The following section contains details of previous studies which have influenced the design of the research in this paper, from understanding key parameter sensitivity to being able to verify acceptable assumptions. It provides context to the simulation methods which are subsequently employed as the novel research in this paper. Simulation results are then reported of a towing vehicle accelerating past the critical speed with a single axle trailer before a transient manoeuvre is conducted. The centre of mass with respect to the trailer wheel axle is adjusted for stability, instability and then a simple control algorithm for rear-wheel steering is implemented based on measurements available from parking sensors and rear vehicle camera observations, thus minimal changes are needed on the trailer, which aligns with commercial expectations. Improvements in the stability are demonstrated showing the benefit to vehicle capability and expanding the safety margin of the coupled problem. Industrially relevant conclusions are then provided.
Studies highlighting trailer stability and design properties
In this section, previous work on trailer stability is listed where it shows benefit to this research, shows alternative methods to rear wheel steering or has made a notable contribution to improving knowledge in the area. These journal papers originate from a range of decades but are still relevant. Whereas towing vehicles have increased in mass and technology (lane keeping, driver aids, radar, control and stability), trailers tend to remain the same simple designs, without electronics (load cells, gyroscopes), employing simple braking and standardised towbar interfaces.
Investigations into towed trailer stability have been largely simulation based (as in this paper) due to the catastrophic dangers that design of experiments can achieve. Notable exceptions tend to only approach the instability margin but have been used to guide rules and best practice. Despite modern vehicle control systems, it is clear that the current state of the art doesn’t provide a single solution, especially without knowledge of the trailer state.
The stability of a coupled trailer and tow vehicle can be investigated through eigenvalue analysis3,4,8,12–14 applied to equations of motion, providing physical criteria such as vehicle speeds and wheel loads which can be problematic. It can also be applied to complex vehicle simulation models (themselves equations) by linearising the coupled vehicle model about an equilibrium position to show poles and zeros on a bode plot. This has been carried out later in this paper specifically applied to the rear wheel steering. The eigenvalue analysis also shows that there is a critical vehicle forward speed (see Van De Molengraft-Luijten et al. 12 and also Mikulcik 14 ) above which the trailer may become unstable (given prescribed loading conditions), and the results in this paper accelerate a trailer from stationary, through this critical speed and above, subsequently using a perturbation to assess the condition of neutral stability or unstable behaviour.
Stability can also be investigated through the driver felt motions 2 or negative damping factors1,5,7,10,15–17 but are usually framed in terms of physical trailer parameters. As such, the results in this paper replicate a simulation of real world towing where this damping factor can be explained.
Trailer specifications for stability
The simulation model in this paper requires prior knowledge of design factors such as longitudinal loading or tyre stiffness. Here, the prevalence of instability involving sway or snaking of a trailer is linked to parameters which can be included in the simulation.
A large number of authors have stated that towed trailers show lateral instability occurring if the trailer centre of mass is moved rearward relative to the trailer axle (longitudinal), for example Hac et al. 2 state that it is the most important single issue for the coupled system. Other authors simply note the position of the trailer centre of mass relative to the axle position affects the coupling strength of the instability.3,8,13,18,19 Movements of trailer loading are simple to accomplish and rely only on user competence.
However, the trailer yaw moment of inertia increasing is also stated to be one of the critical parameters2,13,19 and is suggested by Darling to be the most important. 1 Williams provides a single stability equation between the radius of gyration (thus moment of inertia) and the distance of the tow hitch to wheel axle. 7
Due to these findings, this paper contains a simulation of a trailer with a load that can be moved longitudinally, to adjust the centre of mass location. As the moment of inertia is shown to be important, this will also be simultaneously modified to demonstrate the stability extremes.
Another trailer parameter which is linked to poorer lateral stability is an increase in trailer mass relative to vehicle mass.2,13,19 As this is often limited by licencing or vehicle towing capacity restrictions, the research in this paper maintains the trailer mass and only moves it longitudinally (changing only one parameter at a time).
Several authors have studied the onset of instability whilst driving. Above the critical longitudinal speed, the trailer can show lateral swings. This critical longitudinal speed increases proportionately to the square root of the trailer and vehicle tyre pressures, 7 which alter the lateral tyre stiffness. This parameter relies on the end user’s maintenance and observation, so is outside of the tow vehicle’s influence.
The critical longitudinal speed decreases with a decrease in the cornering stiffness of either trailer or vehicle rear tyre 2 or via changes to the tow vehicle steering system (stiffness and damping). 18 Through eigenvalue and phase trajectory analysis, Ding et al. linked the lateral instability to saturation of the tyre lateral force. 4
Whilst a standard towbar connection is a simple ball joint, the addition of damping at the hitch (of the order 500 N/m/rad s) was found to be significantly stabilising 19 applied to yaw velocity rather than the more typical longitudinal damping on the coupling. However, this requires a yaw damper connection between vehicle and trailer and so will not be studied in this paper.
All-wheel steer vehicles and the influence on trailer stability
The investigation in this paper promotes use of rear wheel steering as a method of improving trailer stability, and all wheel steering/four wheel steering has been shown to have significant path following advantages, including faster yaw rate responses 20 and recent studies on autonomous vehicles 21 where longitudinal braking is at the limit of adhesion.
These advantages were recognised many decades ago, before modern ECU and control implementation, in terms of more accurate yaw control, path following 11 and stability. At low vehicle speeds, the front wheels are steered in the opposite direction to the rear, to enhance turning circle and manoeuvrability for parking. 9 The conflicting requirement for a controller is that at high speeds, the front and rear wheels must turn in the same direction (kept within a small range), to enhance vehicle lateral movement 10 and reduce the delay in generation of cornering force, offering better responsiveness.
Kageyama has introduced the stability analysis for trailers using rear wheel steering as a mitigation 6 showing the good effect on stabilisation, comparing front wheel steering and then rear wheel steering as the system approaches instability. In this paper, the loading cases are more extreme with practical suggestions for obtaining the trailer states without vehicle-trailer communication. Trends in vehicle development are for larger, heavier vehicles, so four wheel steering may become dominant for autonomous towing.
Experimental measurements involving stability measurements
While most of the literature utilises simulation, experimental measurements have been conducted under controlled conditions with near zero or zero damping ratio. Darling states that the practical knowledge is still limited to experience or accident statistics, 1 but focuses on a trailer parametric study, with trailer yaw angles recorded using mobile data acquisition systems. The damping ratio is shown against vehicle speed for different configurations, including friction stabilisers and electronic stability control programmes. They note that as the vehicle speed increases (a 20–80 mph range is shown, linked to the lower range in this more extreme study), the trailer becomes less stable and oscillation takes longer to settle down. Zanchetta et al. provides validation through experimental measurements using a linear potentiometer to find the trailer yaw rate 3 with sinusoidal steer angles of 50° and hitch angle changes of 40°. The damping ratio approaches zero, but negative damping ratio cannot be easily evaluated. Gilbert also provides experimental measurements with a double axle trailer (including one novel case where the suspension is disconnected on one axle) with hitch yaw angle damping ratios between 0.24 and 0.44. Using sand-bags, a load distribution of 40/60 rearwards is considered. In this paper, a similar case is provided, but the total centre of mass of the trailer is moved rearwards, assuming dynamic aerodynamic loads as a test case. This paper also simulates the acceleration of the vehicle through the critical longitudinal speed.
Proposed solutions for vehicle control
Typical methods of solving the coupled vehicle dynamics problem usually centre around front wheel steering control based on tow vehicle yaw angle, 3 coupled or rear wheel braking control, active independent braking of the tow vehicle wheels 2 or active trailer braking. 19 At present, the stability is entirely reliant on the tow vehicle control implementation.
The rear wheel steering control is usually centred on the stability of the tow vehicle, 8 and while hitch damping, active force control on the trailer coupling and active trailer yaw control are presented, they usually do not include implementation details (notable exceptions include Mokhiamar who includes tyre models to estimate lateral forces from vehicle states 22 ). Experimental measurements typically have a data acquisition system with accelerometers and gyroscopes transmitting to the vehicle. Clearly this requires coupled technology for a commercial implementation, while Sharp and Alonso Fernández argues that a solution entirely on the trailer is preferred 19 for example, operator controlled pin pintle friction. Williams proposes a double pin articulation system for coupling, tested on scale models, 7 but also promotes damping.
Some of the most recent advances in this field include integrating the CAN bus (Controller Area Network) information between trailer and vehicle. Glocker and Mantere show their Intelligent Caravan Monitoring System (ICMS) where the vehicle can be informed of the trailer state including individual tyre pressures, wheel weights and overload on the towbar, 23 all of which need the sensors incorporating into the trailer. Multibody simulation software (Simpack) is used by Dižo et al. 24 to show the lateral stability risks of a trailer with centre of gravity behind the main axle, which has a similar setup to this paper, although no mitigation methods are proposed.
Yussof et al. show improvements in heavy duty vehicle towing when a yaw controller is applied to steering axles, 25 validating the model with a hardware in the loop simulation on a scale vehicle. The steering system is modelled with a second order transfer function, which is fast acting with 3° of movement in approximately 1 s. This is used to test the stability of the rear steering when a lag is introduced in the rear wheel steering controller. One of the main assumptions of this paper is that the hitch angle is known or can be found and De Bernardis et al. has shown the benefit for control of knowing the hitch angle and time derivatives, as opposed to just relying on the yaw angle of the vehicle when stabilising a trailer based on nonlinear model predictive control. 26
As such, the literature does not show one solution and thus this paper looks towards rear wheel steering on autonomous vehicles as a contribution, measuring hitch angle with vehicle sensors.
Established definition of a stability criterion
The trailer shown in Figure 1 has a centre of mass which varies for five longitudinal positions. The stability of the coupled system shown in Figure 2 is measured according to the robustness of a controller. The intention of this paper is not to promote a well designed closed loop controller, as robust vehicle stability control is a long established requirement for manufacturers. Instead, simple principles are used to introduce the closed loop control as an initial step. The criteria for stability of the trailer relates to the driver experience, but is objective in terms of two conditions. These are a small oscillation of the trailer hitch angle when perturbed (compared to existing literature values) and a stable damping ratio
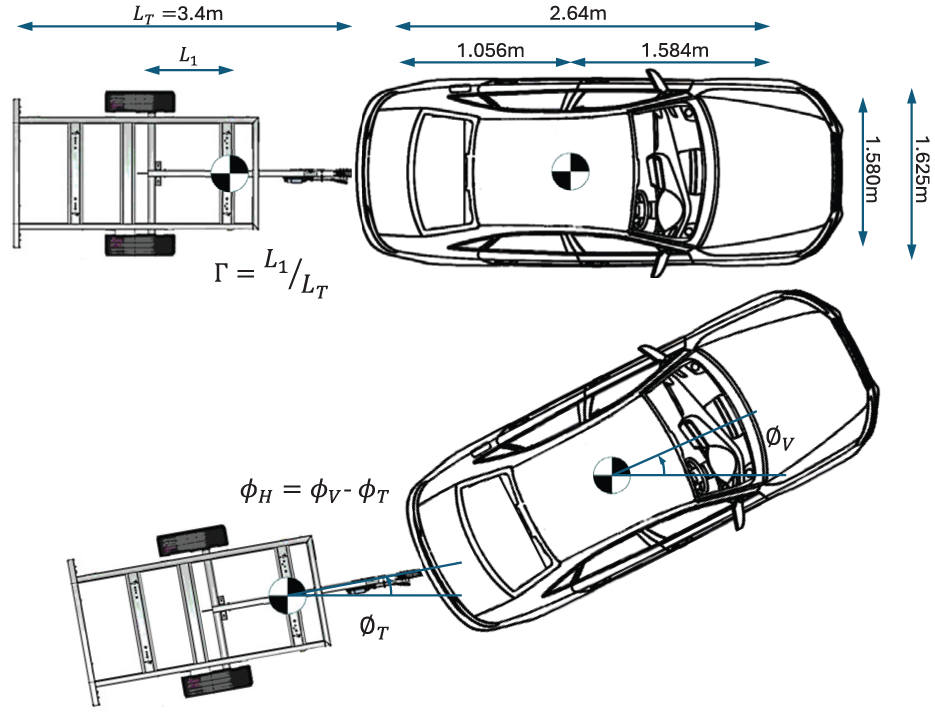
Illustration of the towing vehicle and trailer with dimensions.
The damping ratio

The average of the amplitude ratio is,

Where the damping ratio is one, no oscillation exists. A response to a perturbation is stable for
A distinction is drawn here between the definition of stability used in this paper to assess whether the coupled vehicle and trailer design leads to trailer oscillation where the tow vehicle’s steering motion is dictated by the trailer dynamics, and a formal control stability where the overall closed loop design takes into account the damping ratio as an input. However, when discussing the introduction of closed loop design in this paper, a root locus analysis is provided in which stability is denoted by poles in the right hand side (positive) of the complex plane.
Numerical modelling of the stability of towed trailers for vehicles with rear-wheel steering
The passenger vehicle and towed trailer are shown in plan view in Figure 2 with key dimensions for moving the trailer centre of mass relative to a single axle position. The trailer length (hitch to far rear position) is denoted
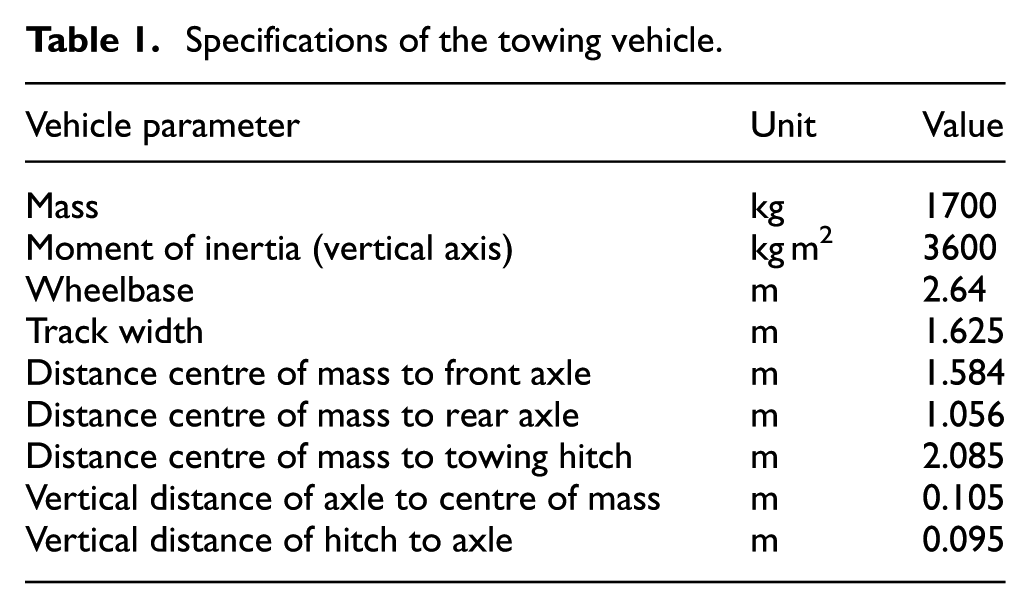
Specifications of the towing vehicle.
Specifications of the trailer.
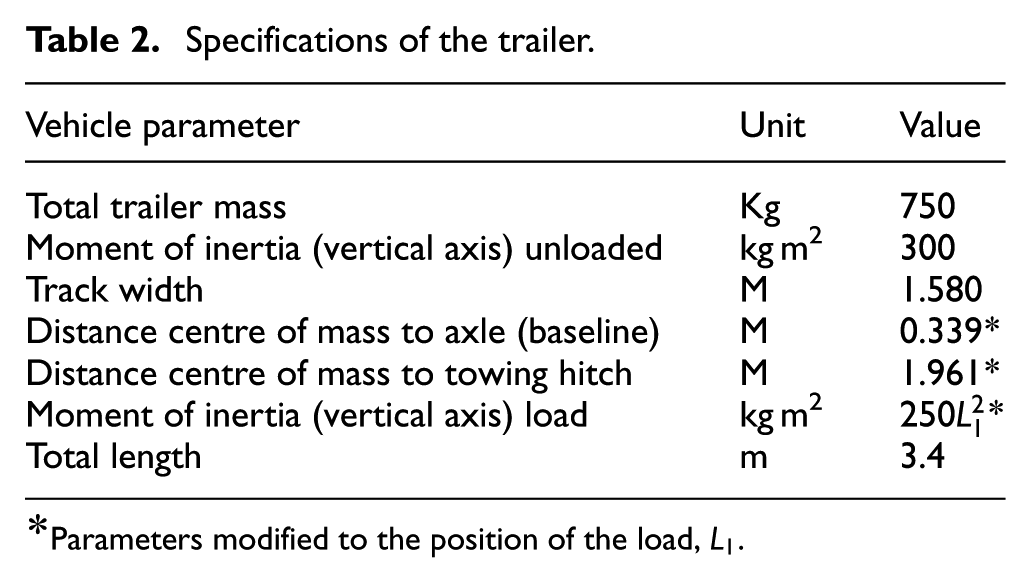
Parameters modified to the position of the load,
For control of the trailer, the global yaw angle of the vehicle is
The automotive vehicle and trailer is modelled in Mathworks 27 Simulink 10.7 2023a using a modified version of the built in example ‘Two Axle Vehicle Towing One Axle Trailer’ 28 which is a three degree of freedom model allowing the vehicle and trailer to move longitudinally, laterally and yaw about the vertical axis.29,30 While the dynamics of roll during the manoeuvre provides a more accurate spatial movement of the vehicle, the simplified model is sufficient to illustrate the yaw sensitivity and stability constraint, see Darling et al. 1 and Vempaty and He 8 for examples. This code provides for two vehicles, generates forces and moments from external constraints, and with knowledge of the mass, generates an acceleration for that timestep. These are integrated twice to obtain new displacements for calculation of the forces and moments at the next timestep.
Modifications to the built in example were made to implement rear-wheel steering linked to a control input demand, the hitch dynamics, measurement parameters and also the location of a centre of mass, however the base model is comprehensive and provides the integration of vehicle position to the tyre and hitch forces on the two masses. The base model is available as part of the Vehicle Dynamics Blockset and the implementation is explained by The MathWorks Inc. 29 and Gillespie, 30 used as the base for investigation in this project. The model used in this paper is available as an open source resource at O’Boy 31 where all Simulink files, initialisation files and plotting routines are included.
Rear-wheel steering is introduced as a control input to the model, in terms of a wheel yaw angle which is proportionate to a tuned gain, similar to Sano et al. 9 The vehicle specifications for the towing vehicle are based on a typical passenger saloon and are listed in Table 1 and the trailer similarly provided in Table 2 where it is assumed that the maximum unbraked towing mass is applied. It is assumed for calculation that a 500 kg mass is applied at a range of longitudinal positions away from the axle position, thus influencing the moment of inertia about the yaw axis.
The tyres are all represented by the Pacejka Magic Formula 6.2 (MF) model, as built in SUV examples of size 265/50R20. These show an approximately linear stiffness to an applied lateral force response of 8 kN but then show non-linear stiffening.
Simulation parameters
The Simulink model provides for the sum of forces and moments to obtain the translational and rotational acceleration, which are then integrated using a variable timestep solver (‘Ode23tb’
32
). The simulation begins with initial conditions of both vehicle and trailer stationary at time
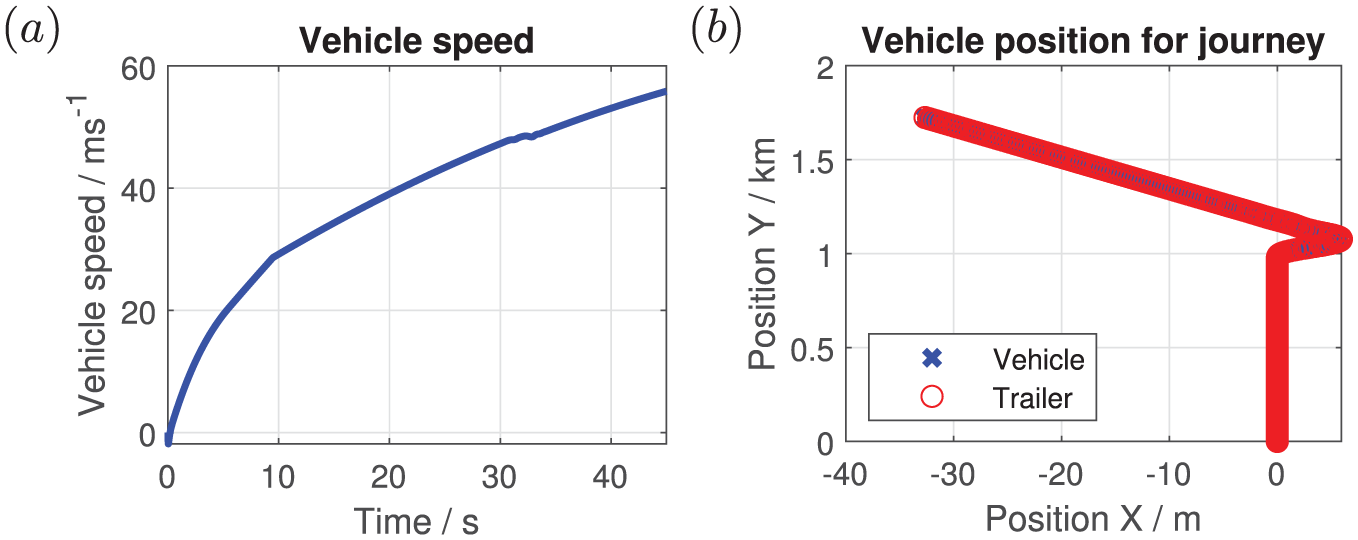
(a) Longitudinal speed variation with transient event occurring at time
The perturbation moves the system from neutrally stable to see if it returns to stable, or shows unstable behaviour. No steering model is included to move the system back to the original course (as if it were avoiding an obstacle) as the intention is only to highlight the dynamics of the coupled vehicle-trailer instead of an adaptive path planning algorithm. The perturbation is not sudden and would not be violent to passengers, but is sufficient to test the stability criterion of the trailer dynamics. The simulation is allowed to run for 120 s (or terminated should the towing vehicle and trailer spin uncontrollably), figures are terminated early to show the transient detail. Whilst the speed is at or above motorway speeds, this is deliberately set to a high speed to emphasise the tolerance of the rear steering damping effect in allowing a controlled, driver aid.
The longitudinal speed profile typical of a controllable event is shown in Figure 3(a), where it can be seen that the acceleration is maintained through the transient event as the intention is to avoid modelling driver-in-the-loop responses. Although the vehicle position changes in the global
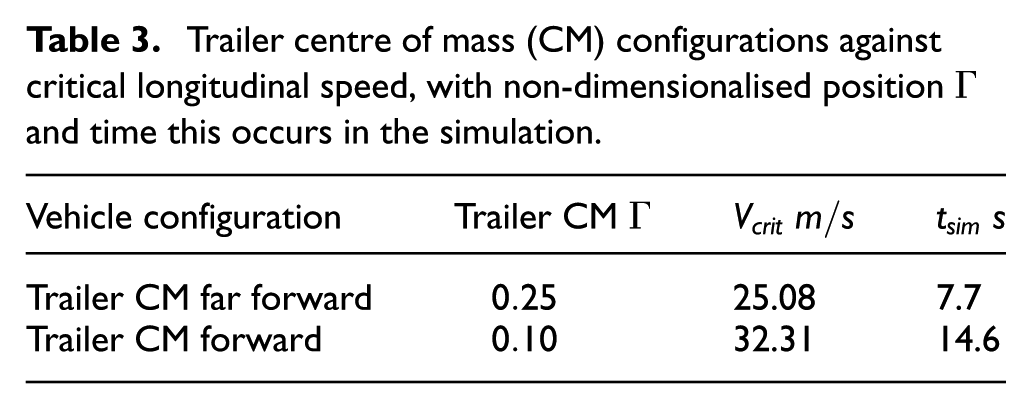
Whilst the simulation results in this paper start with the vehicle at rest (in order to successfully find a valid equilibrium position with the coupled hitch forces), the vehicle accelerates past the critical longitudinal speed, which can be calculated as a function of vehicle, trailer mass, tyre cornering stiffness and longitudinal dimensions. Greater accuracy can take into account nonlinearities, lateral load transfer and suspension geometry but this is not necessary in this case. Table 3 provides an estimate of the critical longitudinal speed for each stable configuration, the same as a predictive loading case might be from an operator, and the simulation time this occurs, based on equation (10) of in Mikulcik. 14 Here the cornering stiffness of the vehicle and trailer tyres are both set equal at 120 kN/rad.
Trailer centre of mass (CM) configurations against critical longitudinal speed, with non-dimensionalised position
A series of simulation results are presented representing the full range of trailer centre of mass positions where stability may be evaluated, listed in Table 4. Four are presented without any rear-wheel steering present and two demonstrate the effect of simple active rear-wheel steering. The damping ratio determined from the first eight oscillations of the trailer hitch angle is shown, where positive numbers are limited or decreasing growth, and zero or negative numbers indicate instability. By way of confidence, the damping ratios in the literature for experimental measurements range from 0.1 to 0.4 1 and 0.05 to 0.35. 17 Analysis of the dynamic coupled system is also undertaken using root locus techniques, to demonstrate exponential or oscillatory growth of unstable roots.
Trailer centre of mass (CM) configurations for the stability tests, with non-dimensionalised position
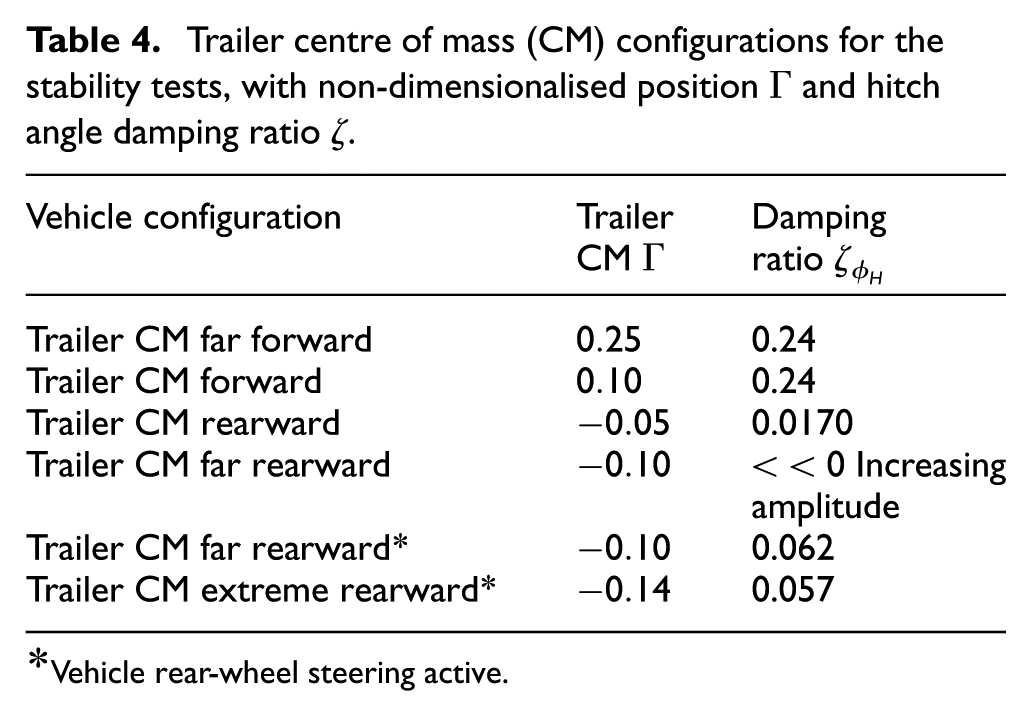
Vehicle rear-wheel steering active.
Stable trailer loading
Two load cases are provided for illustration of the industrial and consumer problem; (i) that where the centre of mass of the trailer is located far forward of the axle position, and (ii) where the centre of mass is positioned just forward of the critical position. In both cases, full stability of vehicle control is demonstrated, which may well lead a driver to become complacent in the vehicle dynamics, especially as the critical loading only needs to adjust by a small amount to lead to instability.
In the case where the trailer centre of mass is far forward
The input front wheel steering angle and also the vehicle yaw angle for
Behaviour of the towing vehicle and trailer when the trailer centre of mass is forward of the axle position (
These figures show the transient manoeuvre at a time of 30 s. Before and after this, the rate of change of angle is practically zero, but the full image of Figure 4(a) is shown for completeness in the Appendix as Figure A1, however, the sinusoidal oscillation is compressed and thus less visible.
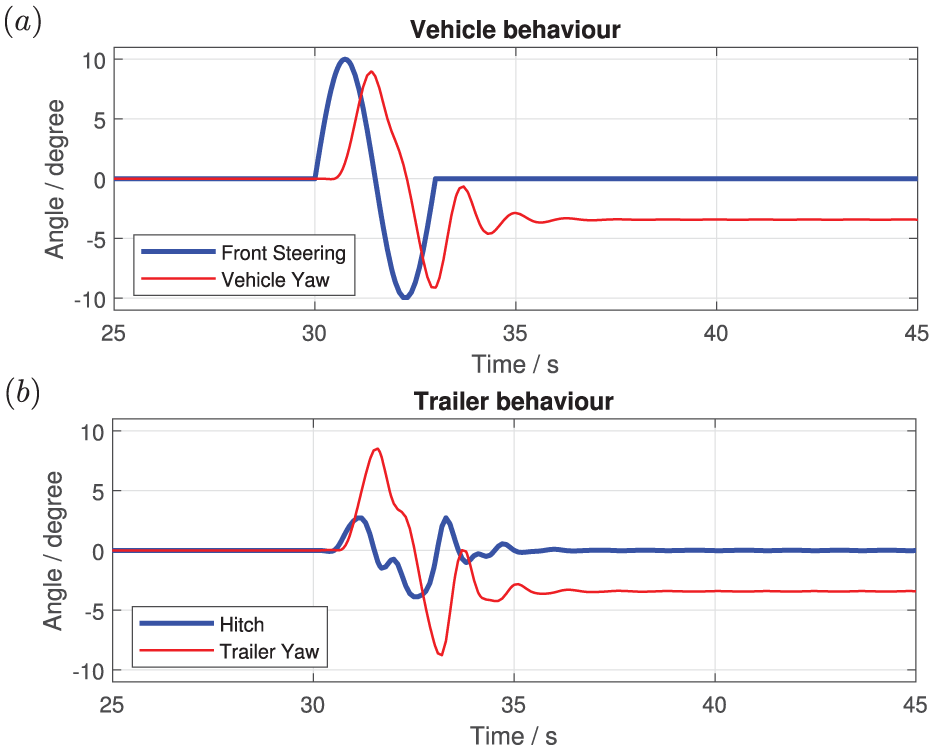
The trailer centre of mass is moved rearwards, but critically, still forward of the trailer axle position at
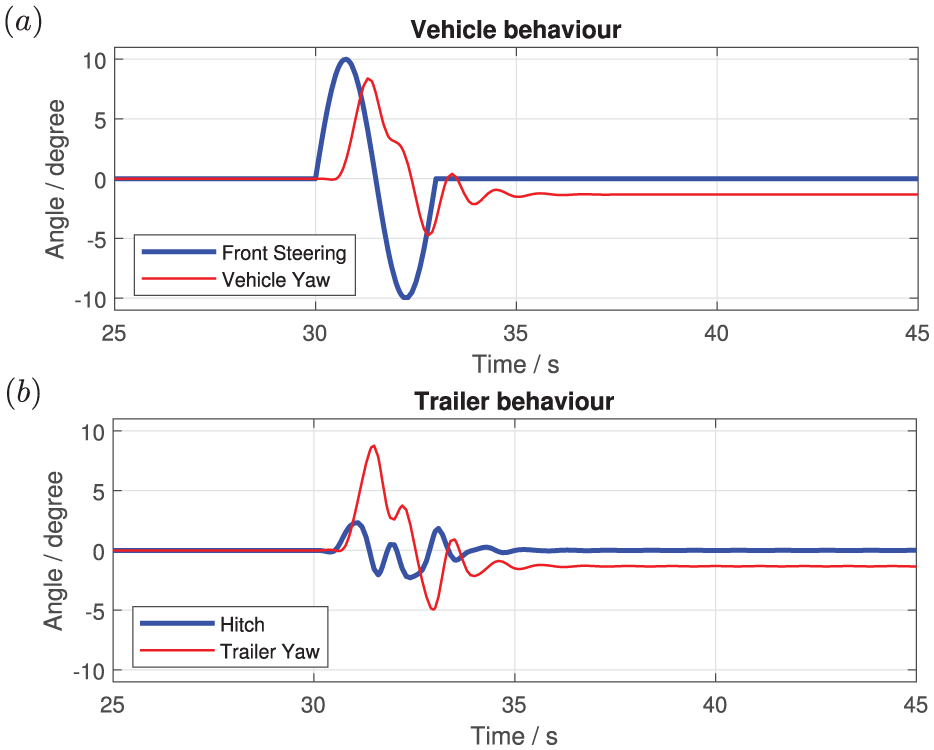
Behaviour of the towing vehicle and trailer when the trailer centre of mass is just forward of the critical axle position for stability (
Unstable trailer loading
User error is suggested to be a contributory cause of trailer accidents. While towing capacity is a useful measure of whether the vehicle mass is sufficient to control the trailer, and legislation on single/dual axle braking or total braking forces are important, the location of the centre of mass for single axle trailers is critical. The only method to measure this is a simple stability test of whether the disconnected tow-bar rises or falls. However, it is also the case that loads can move during transit, especially with livestock and fluids, notwithstanding aerodynamic drag moments from the cargo. In such cases, the centre of mass may move slightly during transit and only needs to move past the critical location by a small amount to make exponential growth apparent.
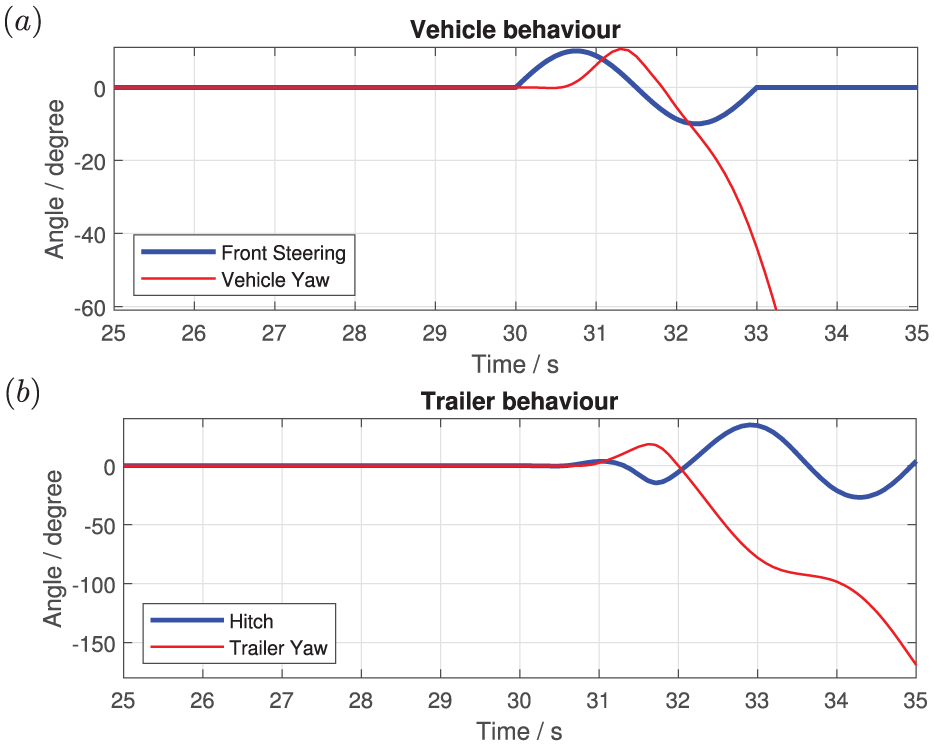
To demonstrate this, the centre of mass is moved just rear of the axle position such that the ratio between the position of the centre of mass to the axle and the trailer length,
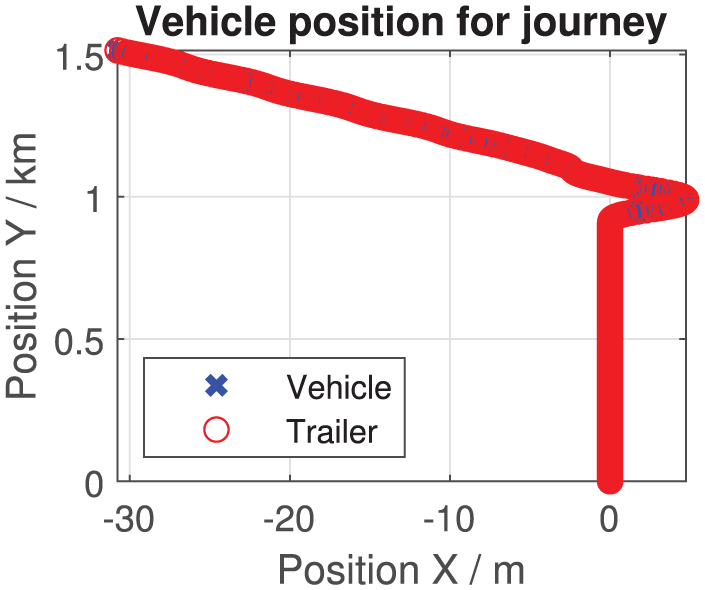
Birds eye view of the coupled vehicle where the trailer centre of mass is just behind the axle position (
The corresponding graphs for the towing vehicle where the ratio
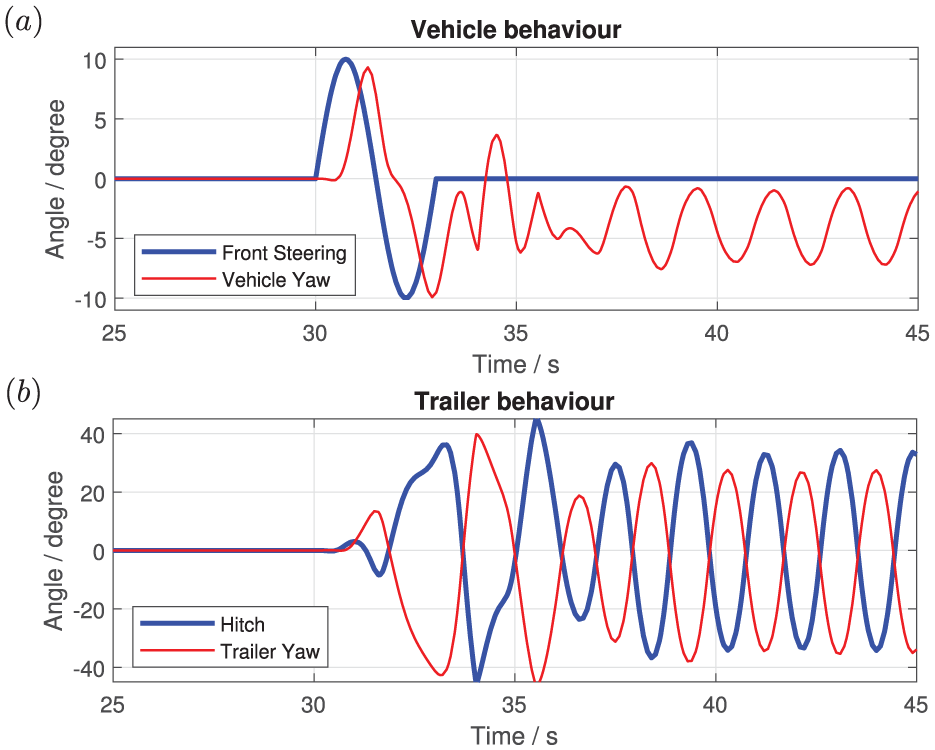
Behaviour of the towing vehicle and trailer when the trailer centre of mass is just rearward of the critical axle position for stability (
An alternative method of demonstrating stability is using a transfer function approach between an output hitch angle when front wheel steering gain is applied as an input, using a root locus approach to seeing poles and zeros on the complex plane. The simulation model is set to a longitudinal speed of 30 m/s and the model linearised about small angle changes. In Figure 8(a), the centre of mass of the trailer is set far forward
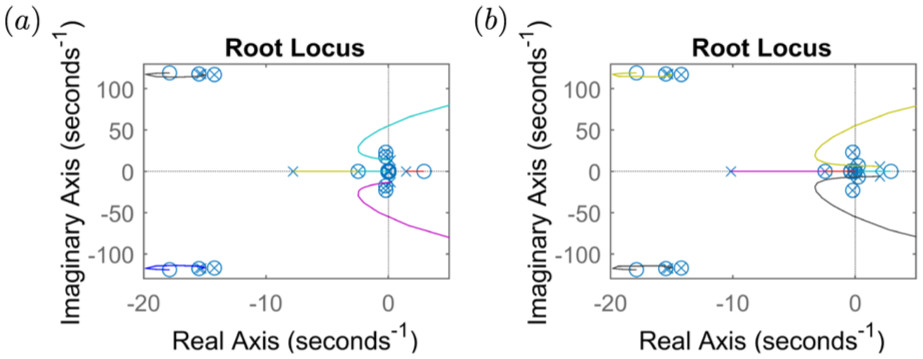
Linearised transfer function root locus from input front wheel steer angle gain to output hitch angle. In (a) stable centre of mass location
When the centre of mass of the trailer is moved sufficiently far behind the trailer axle position
The trailer centre of mass is moved substantially rearward of the critical location about the trailer axle (
Behaviour of the towing vehicle and trailer when the trailer centre of mass is substantially rearward of the critical axle position for stability (
Whilst the overall length of the trailer here is 3.4 m, the unstable cases shown here relate to only 17 cm of centre of mass load behind the trailer axle, something relatively easy to do with aerodynamic loading and user error, see Darling et al. 1 and Vempaty and He 8 for impact of aerodynamics on lateral stability. Given the sensitivity of the loading centre of mass position to the axle position which is entirely the responsibility of the user, at this point, the advanced vehicle control will be demonstrated, introducing the rear-wheel steering. It is envisaged that the vehicle which is already equipped with rear-wheel steering could measure the hitch angle either through typical built in cameras, or rear parking sensors, actuated when the trailer is connected.
Implementation of rear-wheel steering model
The implementation of rear wheel steering has two effects, (i) to improve the stability of a unstable coupled trailer system which would otherwise cause an accident (this paper) and (ii) to adjust the path following for the vehicle to follow driver-in-the-loop directional requirements, itself a complex process outside of the scope of this paper. Path following and the control is complex as a topic and is split into determining the initial and final trajectory, then extrapolating the path with a velocity profile. 33 It is then incorporated into the vehicle with rear wheel steering taking into account the speed dependence change between low speed manoeuvring and higher speed lane following, incorporating disturbances for cross wind and cornering based on sliding mode control 34 or non-linear model predictive control. 21
The rear-wheel steering of the towing vehicle is controlled using a simple proportionate gain control linked to an estimate of the difference in yaw angle between the vehicle and trailer,

where
It has long been recognised that passive solutions are not sufficient, so adaptive control is expected. 8 For autonomous driving, knowledge of the trailer hitch angle will be crucial in any case, so this future assumption is appropriate. Whilst rear radar systems tend not to have the resolution, camera interpretations, hitch specific transducers such as string potentiometers or ultrasonic parking sensors, for example Habibnejad Korayem et al. 35 are feasible and have been demonstrated.
The gain
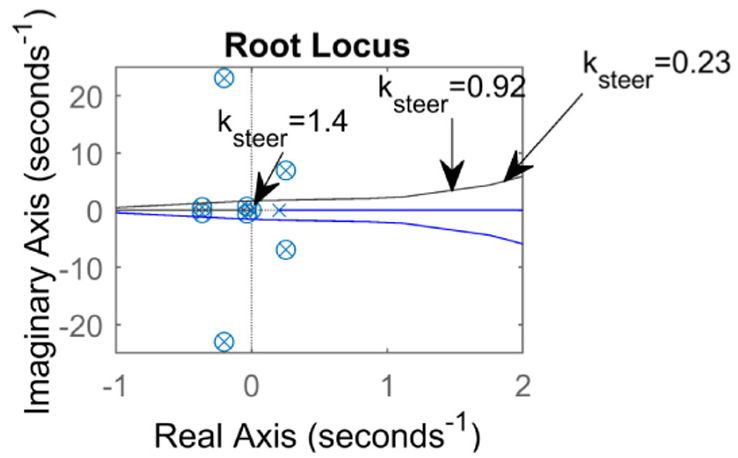
Linearised transfer function root locus from input rear steering angle gain to output hitch angle. Trailer centre of mass location is set to unstable with
More advanced methods of control, safety systems are needed, however this simply shows that a small amount of effective damping widens the operational safety regime of the coupled system. It results in crabbing rather than turning, so an advanced control system would adjust to allow user selected manoeuvres9–11 whilst limiting unstable growth oscillations. Even then, four-wheel drive systems have been shown to be advantageous with simple feedback controllers 10 to increase yaw rate, with discussion over the requirements for unskilled drivers.
While a simple proportional controller is shown here, once the accuracy, latency of the sensors, actuators and processing unit are known, an estimate of the trailer loading can be made through an extended Kalman filter to provide adaptive control. Thus the rear wheel steering gains can be dynamically updated based on actual trailer centre of mass positions.
The focus of this paper is not to design a robust, state of the art, adaptive controller as the sensor fidelity, communication latency, actuator behaviour with temperature, loading, velocity limits, linearity are all unknown. Rather it is to demonstrate the principle of safety improvements through rear wheel steering.
What is particularly advantageous about rear-wheel steering as a control method for unstable trailer dynamics is that in this paper it is proposed to be passive, using only a proportional gain in relation to the hitch angle, and not needing complex vehicle parameters from accelerations and gyroscopic readings. This stands as a key novelty when compared to existing vehicle stability control systems, which while still needed, rely on complex sensors and implement all-wheel braking, which leads to reductions in fuel efficiency and range.
There is however, a contradiction between rear wheel steering to reduce unstable oscillations and path following for example, following the driver input to front wheel steer angle. The stability problem is dynamic and the sensors finding the hitch angle can separate steady state desired motions through Fourier Transform analysis, thus relative trailer yaw motions less than 0.5 Hz in frequency are path planning, but faster responses dictate unstable oscillation. Coupling knowledge of the desired path and lateral deviation would also be advantageous.
The rear centre of mass position is set to
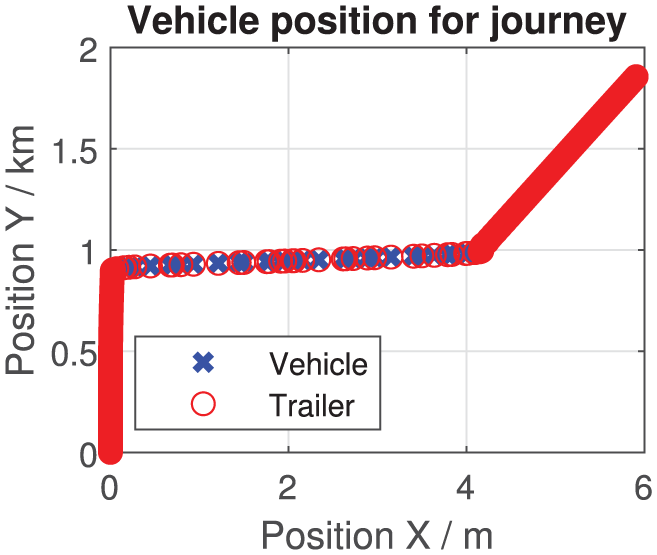
Birds eye view of the coupled vehicle where the trailer centre of mass is far behind the axle position but also where rear-wheel steering control is enabled (
The vehicle front wheel steering angle and vehicle yaw angles are shown in Figure 12(a). Here the influence of the trailer is not apparent, the manoeuvre not causing significant influence of the towing vehicle. The rear-wheel steering, while slight in amplitude, causes the vehicle to crab towards the turn, reducing the hitch angle. The trailer dynamics are shown in Figure 12(b), where the trailer yaw angle and hitch angle are shown. The trailer should be experiencing exponential growth in lateral movement, but the impact of the rear-wheel steering is to mitigate that completely. From a user perspective, the loading of the trailer now goes against the manufacturer guidance, should cause an accident, but the separate towing vehicle changes have avoided that, widening the safety envelope and capability of the coupled vehicle and trailer. The results are comparable to trailer imposed active solutions such as trailer braking and steering.
8
Although the damping ratio
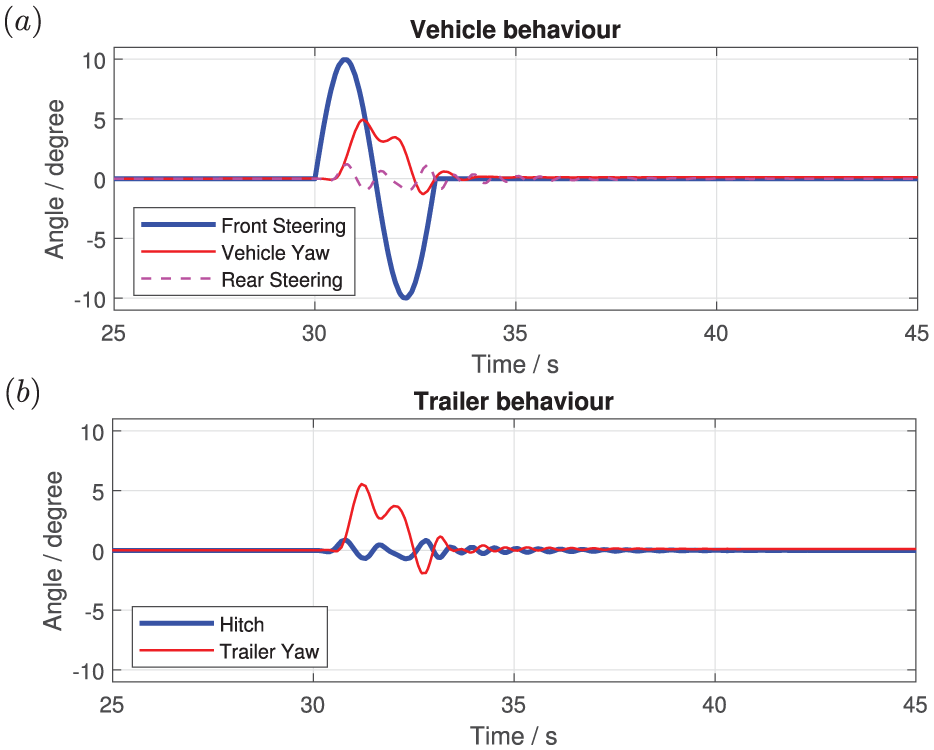
Behaviour of the towing vehicle and trailer when the trailer centre of mass is rearward of the critical axle position (
Expanse of stability using rear-wheel steering with future suggestions
The vehicle capability has been improved for towing with minimal additional control input. Further movements of the loading position on the trailer rearwards would reintroduce the instability, albeit at a slower rate of growth. The trailer behaviour for
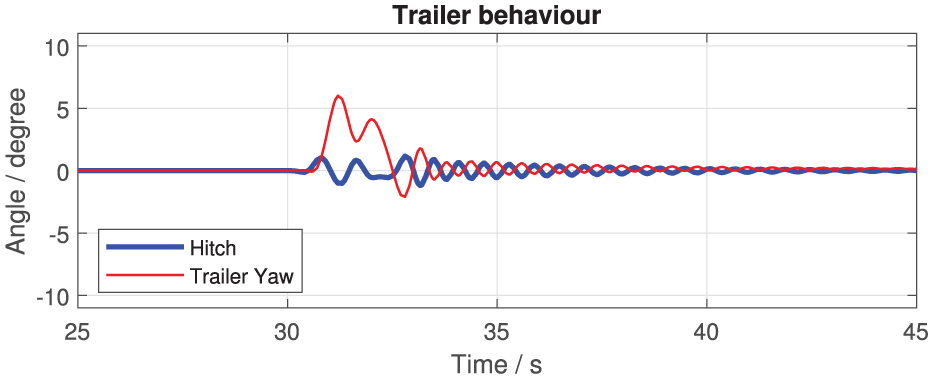
Behaviour of the towing vehicle and trailer when the trailer centre of mass is far rearward of the critical axle position (
Whilst the vehicle capability is increased, the failure of the rear-wheel steer system is not fail to safe, as the moment the system is turned off and the rear-wheels are adjusted back to 0° yaw, the trailer would experience exponential growth as shown previously in Figure 9(b), whereas now, the trailer dynamics are stable, as shown in Figure 13. As the system still shows low amplitude oscillation and low growth rate, it is considered conditionally stable, sufficient to prevent a rapid accident.
The dynamics of rear wheel steering hydraulics/electric actuators are currently not available, however, implementation of a 200 ms delay between hitch angle calculation and rear wheel steering input did not show significant differences. This does provide further work which should focus on (i) the camera, parking sensor acquisition of the hitch angle, sensor fusion and signal processing, (ii) the robust analysis of the actuator dynamics and limitations for the rear wheel steering and (iii) production of a robust adaptive control strategy using the previous two points.
Conclusion
The analogy of a towed single wheel trailer system undergoing stable and unstable loading of the trailer about the wheel axle is demonstrated with a Simulink vehicle dynamics model representing a typical saloon vehicle. When the centre of mass is forward of the wheel axle position, it is shown that perturbations of the towing vehicle’s front wheel steer angle causes the trailer to oscillate in a controlled and stable fashion. When the centre of mass is moved rearwards of the axle position, any perturbation causes exponential growth of the lateral trailer position and will likely cause an accident. Importantly, a simple proportional gain rear-wheel steer system is implemented which can be shown to negate the unstable oscillation and prevent the trailer from generating an accident condition, increasing the vehicle towing capabilities and safety. This is particularly advantageous as it is a passive safety system and with the growth of real wheel steer systems on larger vehicles for tighter turning circles, provides an additional safety system on the towing vehicle which negates any driver loading errors on the trailer, thus increasing the safety margin on the coupled system.
The simulation model has indicated that where a rear loading case has put the ratio of distance from centre of mass to the wheel axle divided by the length of the trailer
Footnotes
Appendix
Acknowledgements
The authors wish to express gratitude to those who developed the Matlab Vehicle Dynamics Toolbox software.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Data availability
All data created during this research is available from the Loughborough University data archive, together with models and processing scripts for the images in this paper.