
Abstract
Substantial challenges still exist in designing path-tracking control systems for autonomous vehicles, particularly at speed limits or under varying operating conditions. Such problems arise for various reasons, such as the nonlinear characteristics of vehicular components, system-component interactions, constraints on the states and control inputs, and more. This paper focuses on designing a robust adaptive control system for high-speed autonomous vehicles in case the system dynamics are unknown or unavailable. For this purpose, an intelligent NN-based estimation system’s universal approximation potential will be leveraged, coupled to an adaptive integral sliding mode controller (AISMC). Unlike previously reported studies, the present paper considers the entire dynamics of the autonomous vehicle unknown rather than solely a part of the system or external disturbances merely. The Lyapunov stability theorem is employed to guarantee the asymptotic stability of the developed framework and to obtain the adaptation laws. A critical maneuver explores the effectiveness and robustness of the suggested framework under severe disturbances, parametric uncertainties, and high speeds. The obtained results indicate that the developed framework holds the capacity to navigate the vehicle alongside the desired trajectory and outperforms other reported studies in the literature subject to various external disturbances.
Introduction
Autonomous vehicles (AVs) are vital to accomplishing higher levels of intelligent transportation systems by reducing traffic congestion, efficient use of infrastructures, and artificial intelligence at the heart of decision-making processes. Additional benefits include, but are not limited to, decreasing air pollution, promoting road safety and comfort, driving safety, and enhancing energy efficiency. Furthermore, certain levels of connected and cooperative driving and platooning of cars, trucks, and commercial vehicles are achievable through the well-planned deployment of autonomous vehicles. Despite massive progress in instrumentation and measuring systems and the availability of convenient sensors, actuation systems, communication networks, and computing tools, the control problem concerning automated driving remains a crucial issue still because of the range of dynamic and system complexities and unknown sources of uncertainties. The uncertain road conditions, infrastructure constraints, and dynamic states of road traffic all together require the deployment of more effective and state-of-the-art control paradigms for autonomous road vehicles.1,2 For instance, path tracking control involves a deep knowledge of vehicle dynamics and control modules to guarantee vehicles’ safe and precise mobility on the road without considerable deviation from desired states.
Path-tracking on the plane of motion has two major longitudinal and lateral components. The lateral path-tracking is tightly connected with lane-keeping performance and, thus, safety and security in driverless scenarios. Although a plethora of research exists on various control algorithms, establishing an accurate and efficient control system for automated driving is still challenging. The critical feature of any control law design is to set the lateral offset and the heading angle tracking deviations to a trivial level. Apart from the control algorithms, a significant concern with the design of a path-tracking structure for following a trajectory generated by the path planning unit is the choice of a functional steering control module in terms of active front steering, direct yaw moment, or the hybrid paradigm. High demand for swift yaw stabilization arises during twisty roads with insufficient grip, which contradicts the maneuver’s nature. 3 The hybrid control mode improves handling during critical situations. It enhances stability during emergency maneuvers by choosing a correct steering command for the steering wheel and applying different longitudinal forces between the inner and outer wheels to create direct yaw moments. In such a manner, a path-tracking task can also be accomplished by utilizing the integrated control method even on the verge of speed limits because of the resilience and access to separately actuated controllers. 4
To conclude, integrated control approaches present improved handling performance and overall safety by simultaneously taking advantage of the Active Front Steering (AFS) and the Direct Yaw-Moment Control (DYC) potential.5,6 Because of their inherent resilience and access to allocated control commands, this code is specifically suitable for severe driving conditions. 4 The primary aim of the path-following operation is to track a pre-defined and ideal path over time and ensure the present course joins with an acceptable error level. Because such objectives need to be achieved in a driverless mode with no prior knowledge of imminent road situations, autonomous driving must be stable and robust against a broad range of uncertainties and disturbances. Additional constraints related to vehicle physical limits, the surrounding vehicles, pedestrians, etc., translate into a demand to devise highly effective controllers for autonomous cars.
The literature is abundant with studies with the purpose of promoting autonomous cars’ safety and performance through control algorithms and mechanisms.7,8 For instance, anti-lock braking systems (ABS), 9 active front steering (AFS),10,11 and direct yaw moment control (DYC)12,13 were deployed to develop the needed yaw rate level during critical maneuvers. Differential braking designs can produce a considerable DYC, which is then applied to the chassis to elevate active safety in difficult overtaking or maneuvering situations. 14 A typical issue related to DYC is determining a functional mechanism to build the ideal moment. 15 Furthermore, the yaw moment depends on the surface situation and tire grip to build up directional forces. When the inertia moment is significant, the yaw moment may be small due to insufficient longitudinal tire forces. 16 Additionally, the reported studies in the literature associated with control algorithms for autonomous cars are mostly constrained to perform one particular action and provide common driving safety conditions.17–19 Thus, those algorithms are only reliable if the pre-defined conditions hold for those paradigms. Therefore, any integrated control technique, for example, AFS/DYC, is more expectable to give suitable measures to assess the path-tracking performance with a slight conflict between different opposite requirements for vehicles during severe maneuvering.20–23 This integrated automation has demonstrated abilities to help raise the tracking efficiency in dynamic situations and critical maneuvers. 24
The reviewed literature ascertains that the integrated intelligent control approaches serve as a practical means to handle autonomous cars’ path-following tasks, especially during harsh driving situations. Despite this, further analyses are required to design functional and capable methods to address driving under difficult road conditions.20,25 Satisfactory performance of autonomous cars during lane-changing and lane-keeping tasks has been reported for integrated control methods where the cruise control decreased the load on the steering system by 20%.11,26 However, additional studies are required to verify the efficiency and reliability of such techniques in dealing with severe driving conditions and maneuvers. Considering the arguments made above, the current research focuses on designing a novel control strategy that includes the yaw-tracking and path-following performances in an ideal bound by employing integrated DYC + AFS. The essential aim is to make the vehicle build up the yaw rate and sideslip angle values close to the ideal states to perform cornering, lane-keeping, lane-changing task, etc. To accomplish this goal, the suggested scheme encompasses a novel method according to the state estimation by leveraging the capacity of an adaptive, robust neural-network integral sliding model controller.
The proposed control method utilizes the yaw-moment and the front wheel angle as the control inputs to achieve the path-following objective, even in critical situations, such as on low-friction roads or lack of certainty related to vehicle parameters. For this purpose, an adaptive state-observer-based NN-ISMC controller with auxiliary control terms is employed to estimate the model states and guarantee the stability of the closed-loop system. The performance of the proposed control method for the path tracking task will be compared with an optimal robust control method and Taghavifar et al. 19 by employing high-fidelity co-simulation in the CarSim-Simulink environment.
The prominent contributions of the current paper can be outlined in terms of the following:
Compared with the earlier studies, we assume the whole dynamics of the vehicle to be unknown rather than only a part of the system or the external disturbances.
A novel state observer-based adaptive robust NN-based ISMC controller is developed.
The capability of the suggested method is verified during different emergency scenarios, Double Lane Change (DLC), with the aid of a high-fidelity Simulink-Carsim co-simulation.
The rest of the paper is outlined as follows. In Section 2, we explore the dynamics of a road car, the tracking errors, and system considerations. In section 3, the proposed observer-based NN-ISMC controller is developed. Section 4 discusses the main results and primary outcomes a. Section 5 summarizes the main highlights.
Problem statement
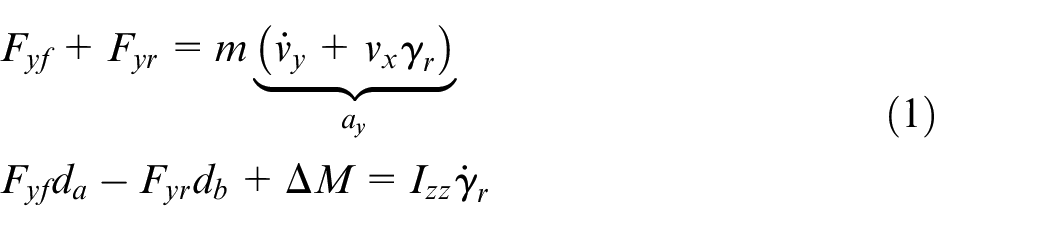
The present paper employs a commonly used two-degree-of-freedom bicycle model assuming a flat road surface, symmetricity between the right and left sides of the vehicle, and infinitesimal compliance of the chassis and suspension components subjected to a small aerodynamic force (Figure 1). Additionally, the variations of the longitudinal forces at a constant traveling speed are considered negligible. Nevertheless, the forward traveling speed should suffice to provide lateral forces proportional to the slip angles during cornering or emergency maneuvers. Thus, considering the presented assumptions, the three degrees of freedom on the plane of motion can be reduced to a typical bicycle model by neglecting the longitudinal dynamics. Accomplishing two substantial goals, given the presented vehicle dynamics, can provide an ideal path-tracking performance; (i) the vehicle yaw angle converges to the ideal state in finite time, thus avoiding losing yaw stability and (ii) minimizing the lateral offset of the vehicle by reducing the position of the vehicle in the lateral direction to help lane-keeping and improve safety. The lateral offset error delineates the nearest distance between the vehicle and the expected trajectory in terms of an orthogonal projection. Hence, the vehicle bicycle model employed for path-tracking control is given as:
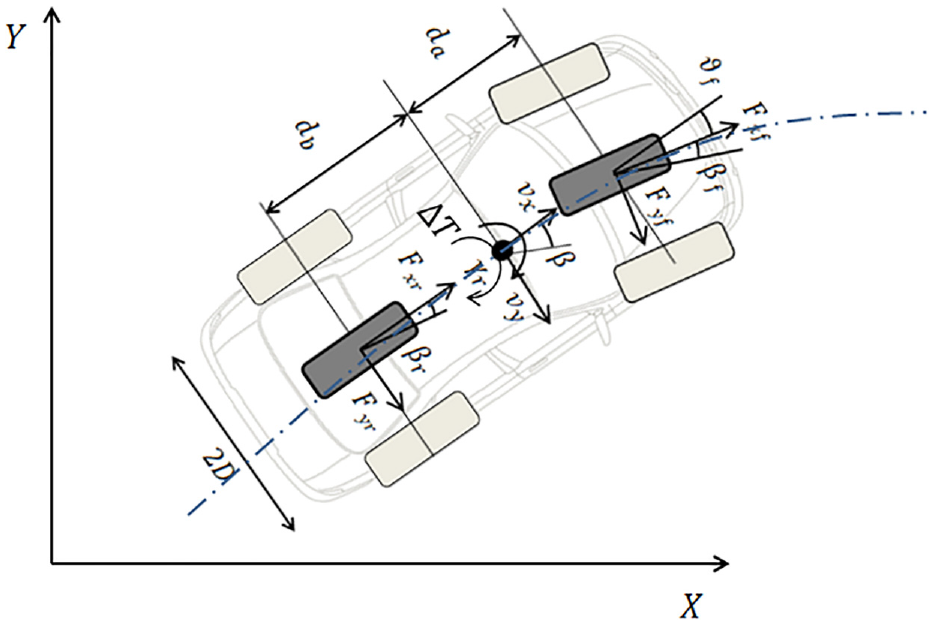
Yaw-plane 2-DoF model representation of the vehicle assuming right-and left-track symmetricity.
where

where the subscript
The lateral forces developed by tires can be assumed proportional to the tire sideslip angles correlated by the corresponding cornering stiffness parameters:

The above tire model takes into account the uncertainty of tire cornering stiffness
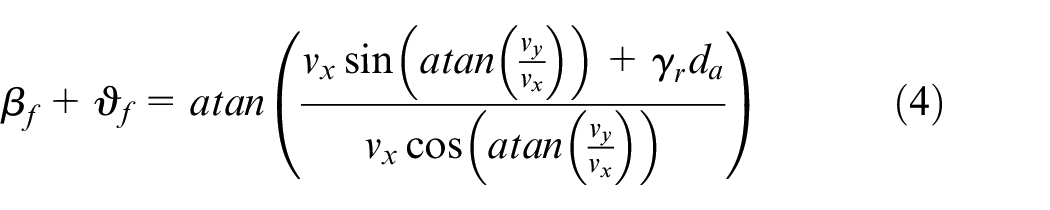
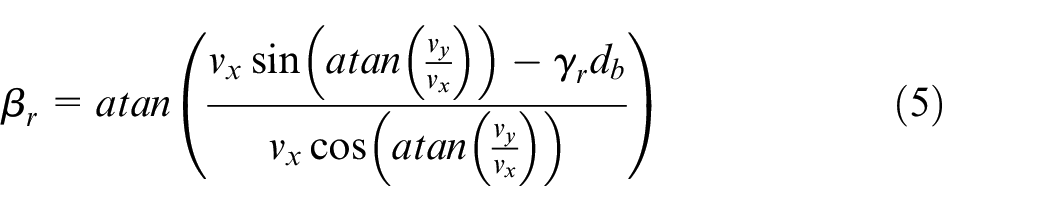
where
Considering the above dynamics, the system governing equations can be re-written in the following form:

Where
Control and observer design
In this section, a general unknown state model of the system explained in (8) is estimated through the observer dynamics as follows:

where

By defining the optimal values of the parameters
The function approximation errors can be shown as:

From (15) and the vector form of neural network system











Let us define the tracking errors as

A Lyapunov function candidate is considered for the purpose of the stability analysis:
Where
By substituting (15) and (17) in (29), the above Lyapunov function time derivative can be re-written as:
By re-arranging the equations in (30), the above becomes:
By using the adaptation laws (19)–(22), the above becomes:
By adding zeros in terms of
We can further simplify the above equation into:
The adaptation laws (23) and (24) are replaced in the above, to reduce

The above equation is re-arranged as follows:

By replacing the auxiliary control laws in (25) and (26), the above is simplified to:

Barbalat’s lemma is employed here to demonstrate that
Thus, it can be concluded that:
And the only logical conclusion will be:
And this completes the proof. A schematic representation of the proposed controlling framework with the combination of Simulink/CarSim-based high-fidelity co-simulation is shown in Figure 2.
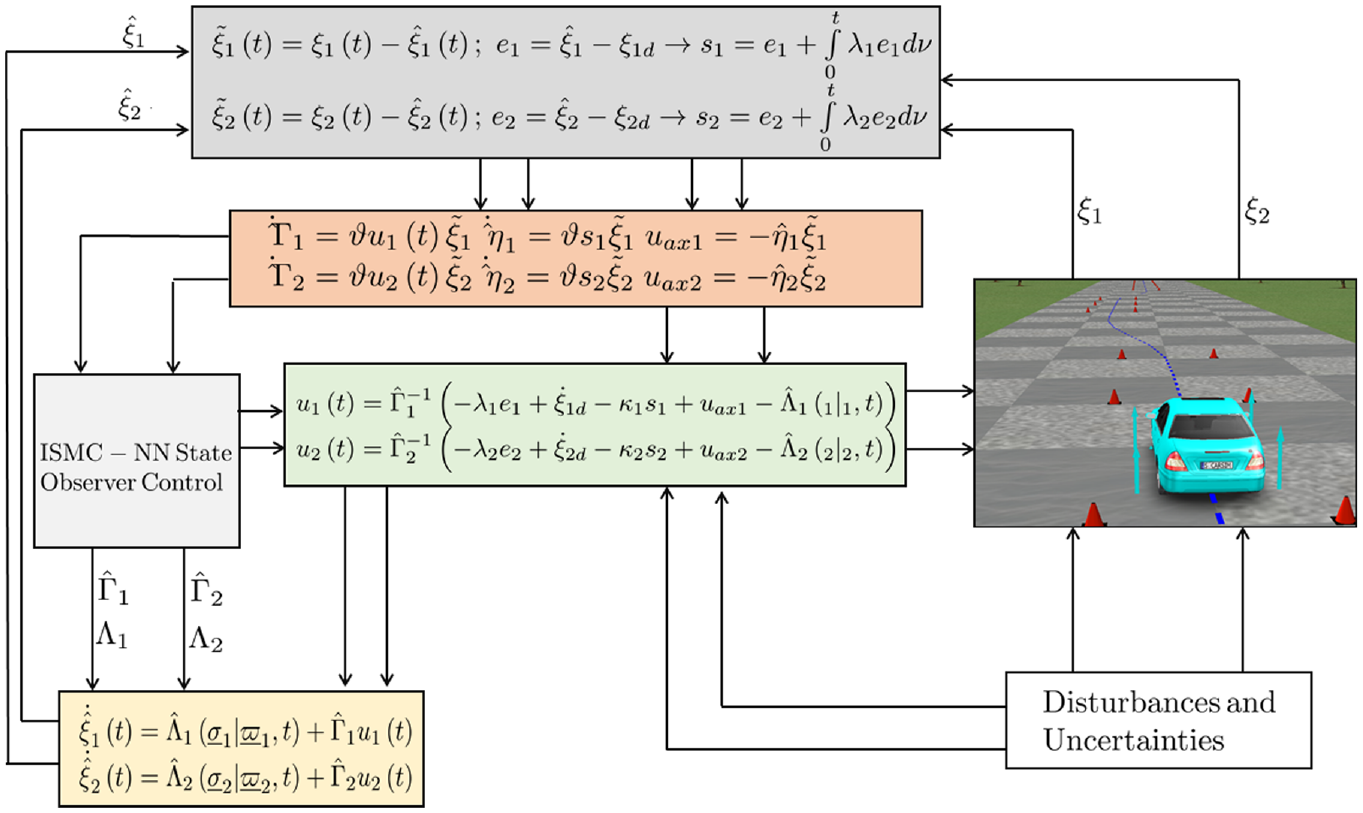
Block diagram of the proposed control algorithm.
Main results
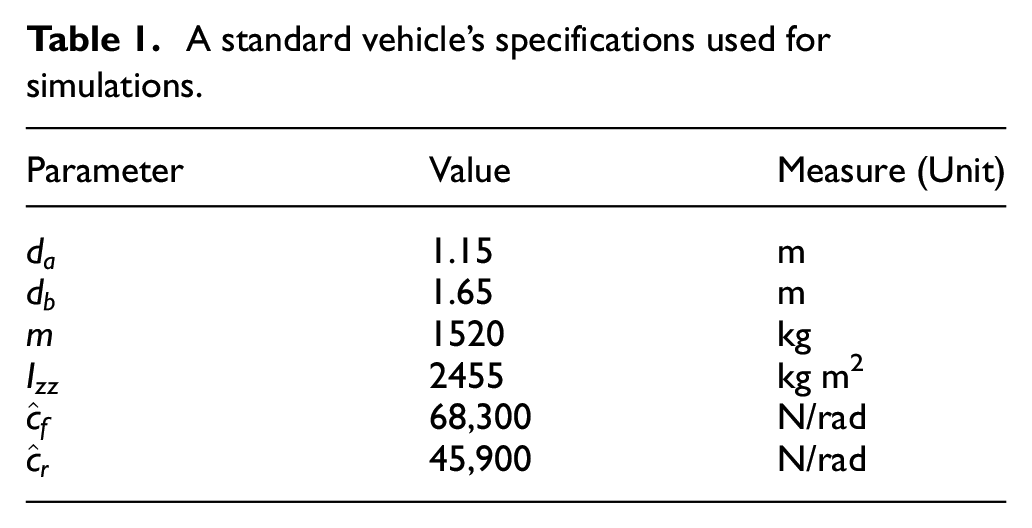
Here, we shall examine the designed controller’s performance through co-simulation for a standard road vehicle, whose specifications are detailed in Table 1. Several uncertain features of tires are addressed using the uncertain component of tire cornering stiffness properties in Section 4.3. The tire-road coefficient of friction, however, is assumed constant at 0.8. The principal aim of using the proposed controller is to cause the car to reach the ideal trajectory and maintain a small, bounded manifold of tracking performance for the lateral offset and heading angle. The ideal trajectories for the vehicle in terms of the lateral displacement and heading angle is as follows:

where
A standard vehicle’s specifications used for simulations.
Base traveling speed without disturbance
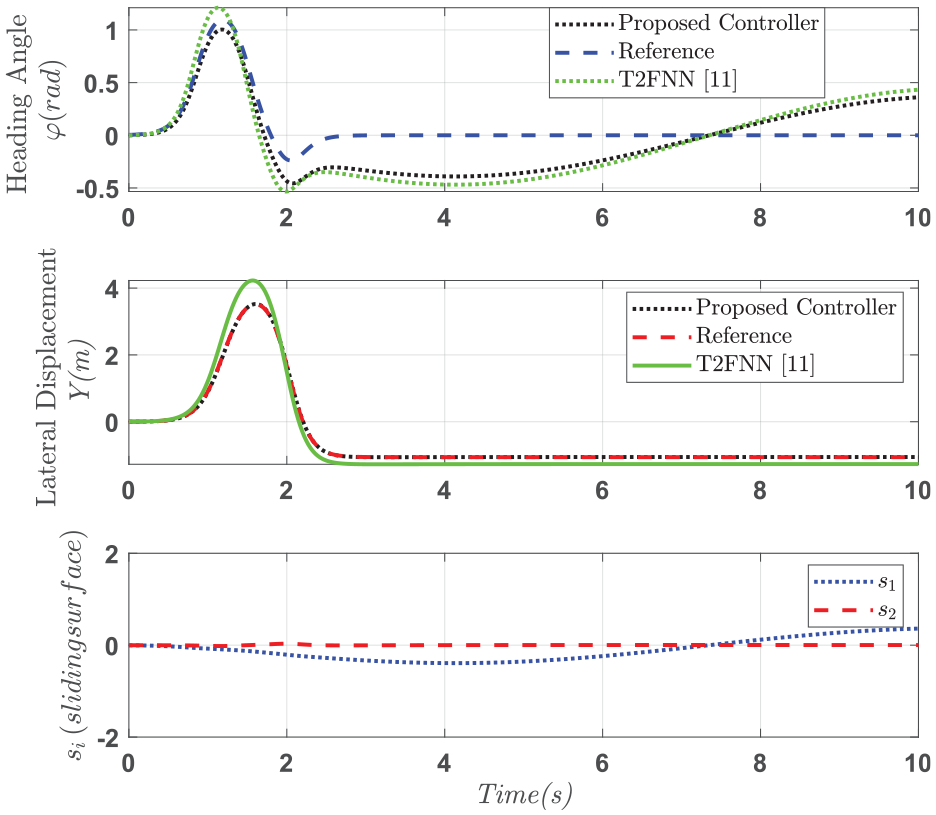
Figure 3 illustrates time histories for the lateral displacement and yaw-angle errors and the designed sliding surface convergence to the origin. Ann initial deviation for the heading angle at the onset is apparent, and also where the lanes are supposed to change. Additionally, the lateral offset magnitude, as the primary measure of lane-keeping performance, is kept close to the origin throughout the maneuver. The high capacity of the suggested controller to converge to the ideal trajectories can be attributed to the mixed-control structure and the auxiliary control terms that help reach the desired level swiftly and maintain the performance during the entire range of the simulation.
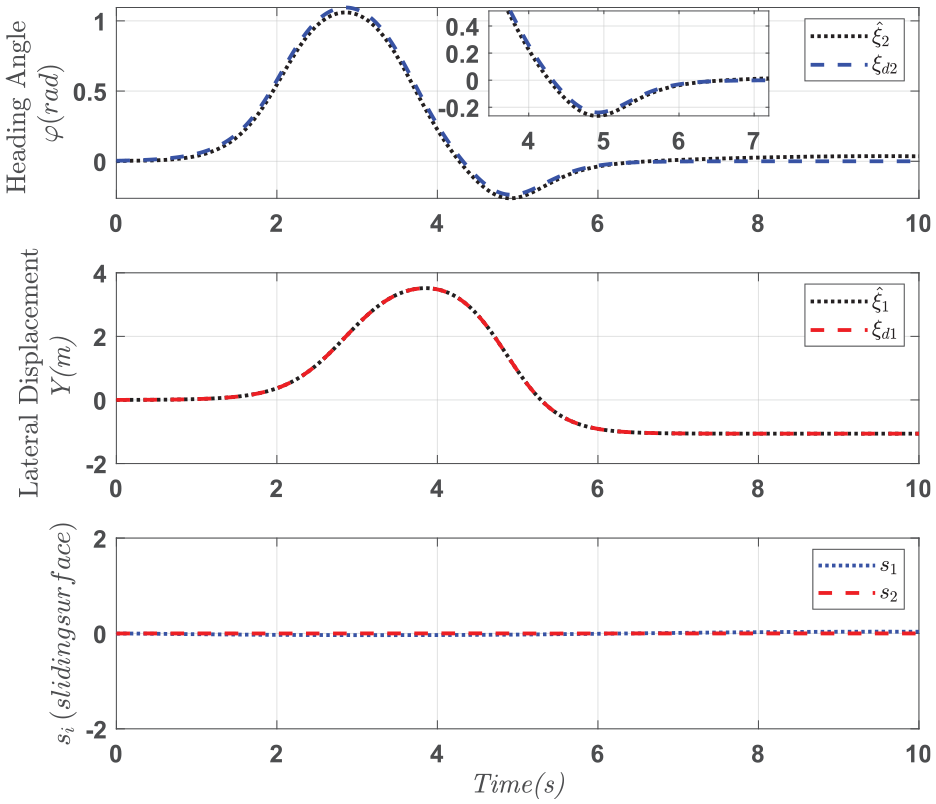
Time histories of yaw-angle tracking error, lateral offset, and sliding surfaces for undisturbed driving condition at 20 m/s.
The substantial variations of the heading angle occur between starts to vary from near t = 1 s until about t = 6 s, where the successive lane changes transpire, which is indispensable due to the non-holonomic constraints of the vehicle and the path geometry. The subsequent deviation of the heading angle can be because of the low damping ratio of the closed-loop system, although it doesn’t affect the lateral offset level. The performance comparison between the suggested controller and the active disturbance rejection control (ADRC) method 27 and Type-2 Fuzzy Neural Network (T2FNN) has been illustrated in terms of the RMS and maximum values of tracking errors (Table 2). Table 2 compares the variations in the selected key performance indicators (KPIs) in terms of the maximum of errors and root mean of squared errors RMSE for the tracking errors (i.e. the lateral offset (e1) and heading angle (e2)) for the proposed algorithm and a T2FNN algorithm 11 and an ARDC. 27 The competent performance of the estimator-based controller is further evaluated against several reported studies in Table 2. It can be inferred from Table 2 that the RMSE of the lateral offset (e1) and heading angle (e2) are obtained at 0.0138 m and 0.0018 rad, which are the smallest magnitudes compared to T2FNN algorithm 11 and an ARDC. 27
Comparing several performance features of the proposed controller versus selected algorithms from the literature.
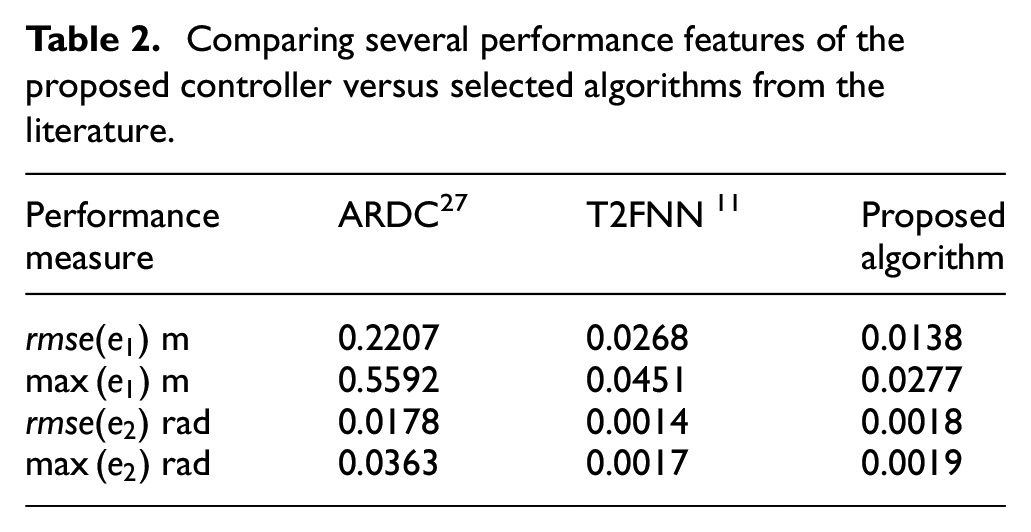
Based on the performance indicators, it is seen that the suggested framework has the capacity to yield minor errors and path deviations compared to the benchmarking techniques. Figure 4 shows the times histories of the adaptive parameters related to the unknown function and the control gains. The variations in the estimations of state function and controller gains
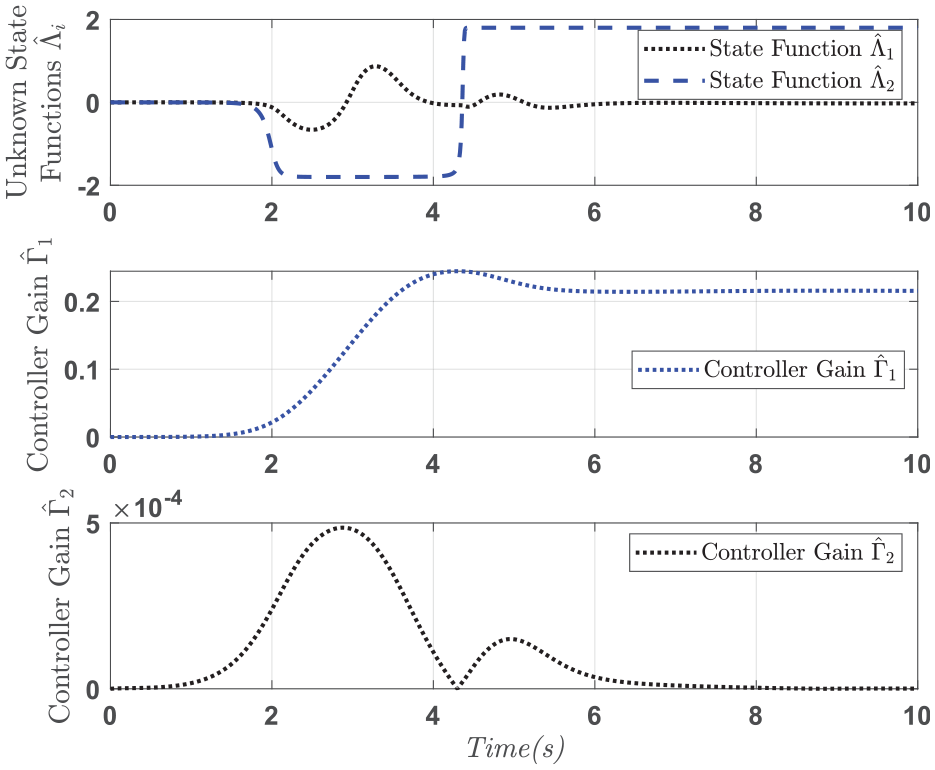
Time histories of unknown functions and control gains for undisturbed driving condition at 20 m/s.
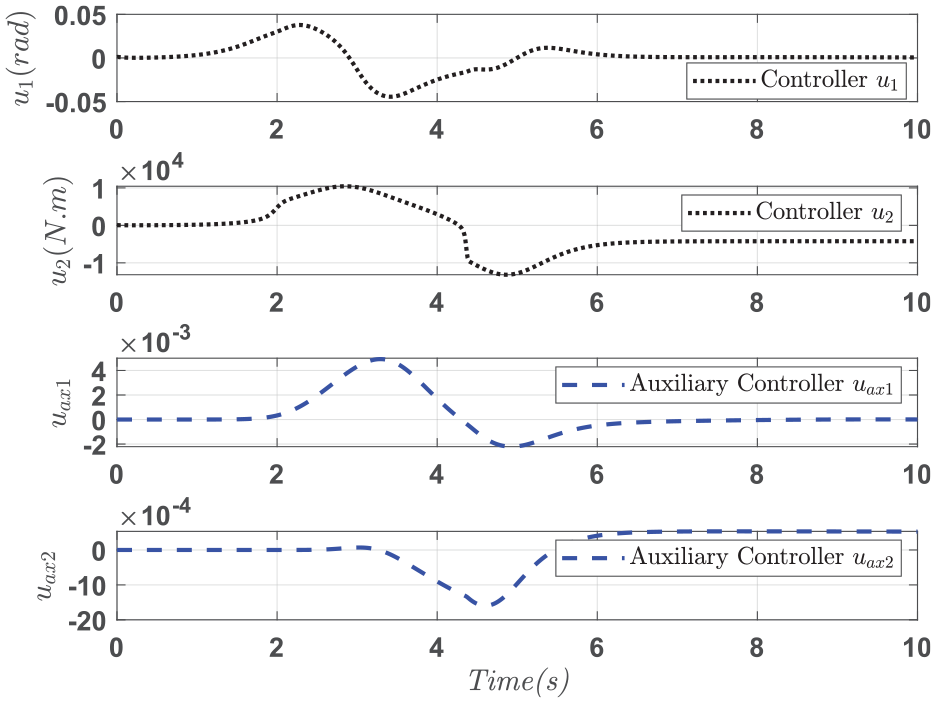
Time histories of control inputs (AFS and DYC) and their auxiliary components for undisturbed driving condition at 20 m/s.
Higher traveling speed without disturbance
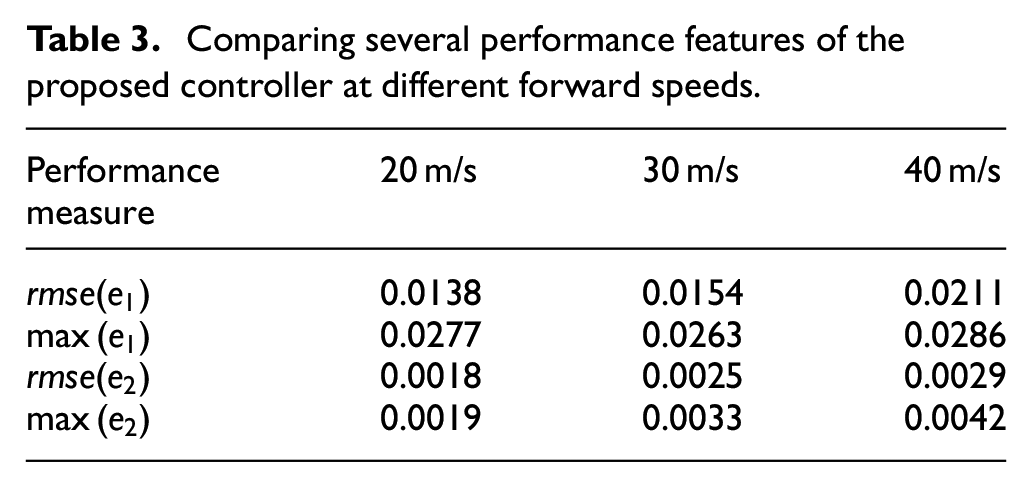
Additional validations and explorations are made to prove the robustness of the proposed controller under various forward speeds, external disturbances, and structural uncertainties. In this section, the results related to the vehicle tracking performance at 40 m/s is presented without parametric uncertainty and external disturbance. The higher forward speed has mainly perturbed the heading angle tracking performance of the vehicle, but no apparent impact on the overall lateral offset of the vehicle throughout the maneuvering period (Figure 6). Indeed, the greater deviation of the heading angle from the desired level at a higher speed is axiomatic due to a critical demand to rotate the front axle of the vehicle. Although the sliding surface associated with the heading angle has small deviations, the lateral displacement of the vehicle remains on the desired trajectory, due to the contribution from DYM component. Figure 7 further demonstrates that the adaptive parameters related to the unknown functions and the control gains have been disturbed because of the higher traveling speed. Time histories of the control inputs and their auxiliary constituents are shown in Figure 8. The results, particularly concerning the first control signal, agree with the results in Figure 6 in terms of the greater effort to constrain the tracking performance for the vehicle heading angle errors. Table 3 gives a comparison of key performance indicators (KPIs) of the proposed controller at different forward speeds in terms of the root mean square error (rmse) and the maximum error. The results observed from Table 3 also support the conclusion made earlier that increased traveling speed causes an increased error level for the introduced KPIs.
Time histories of yaw-angle tracking error, lateral offset, and sliding surfaces for undisturbed driving condition at 40 m/s.
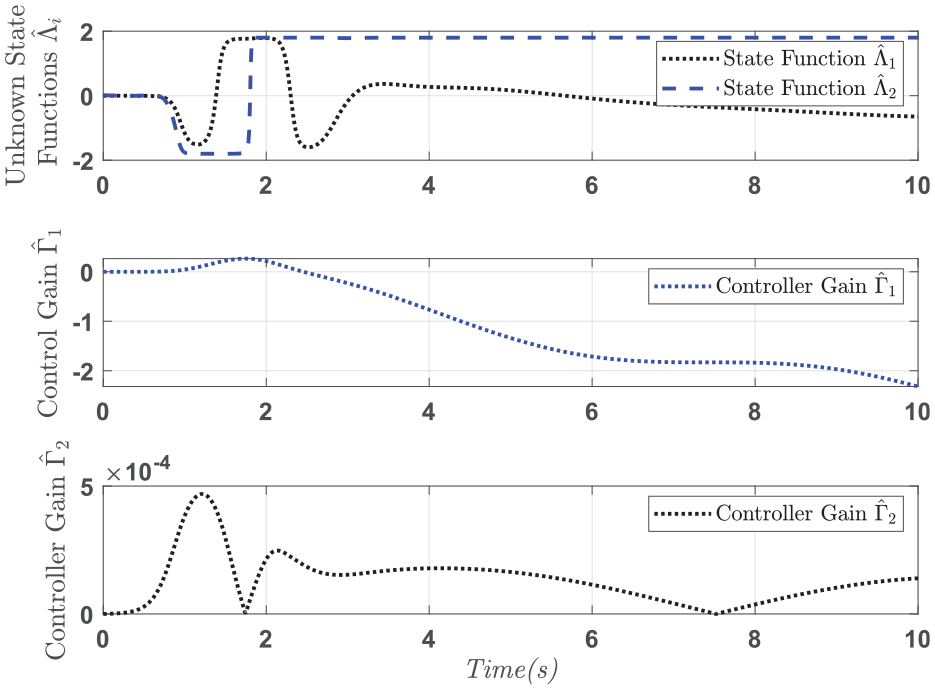
Time histories of unknown functions and control gains for undisturbed driving condition at 40 m/s.
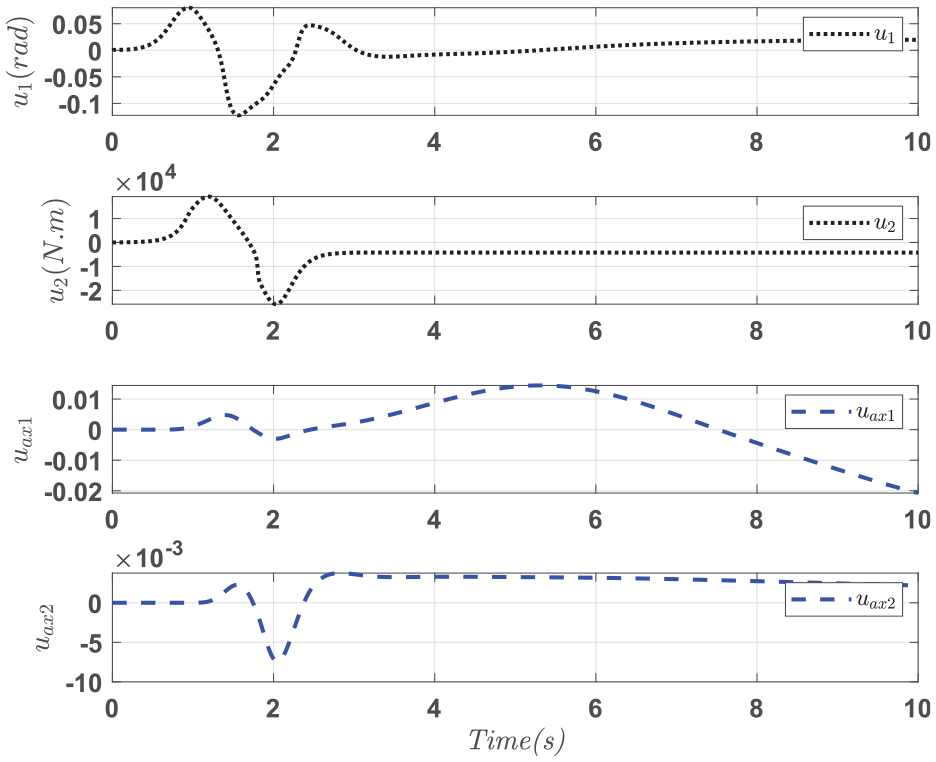
Time histories of control inputs (AFS and DYC) and their auxiliary components for undisturbed driving condition at 20 m/s.
Comparing several performance features of the proposed controller at different forward speeds.
Higher traveling speed with disturbance
In this section, simulations are performed to determine the suggested control framework’s robustness against external disturbances and parametric uncertainties at the higher forward speed of 40 m/s. The three distinct scenarios are introduced as follows:
Scenario 1: Variation in
Scenario 2: Variation in
Scenario 3: A pulse with a width of 0.3 and at 2 s.
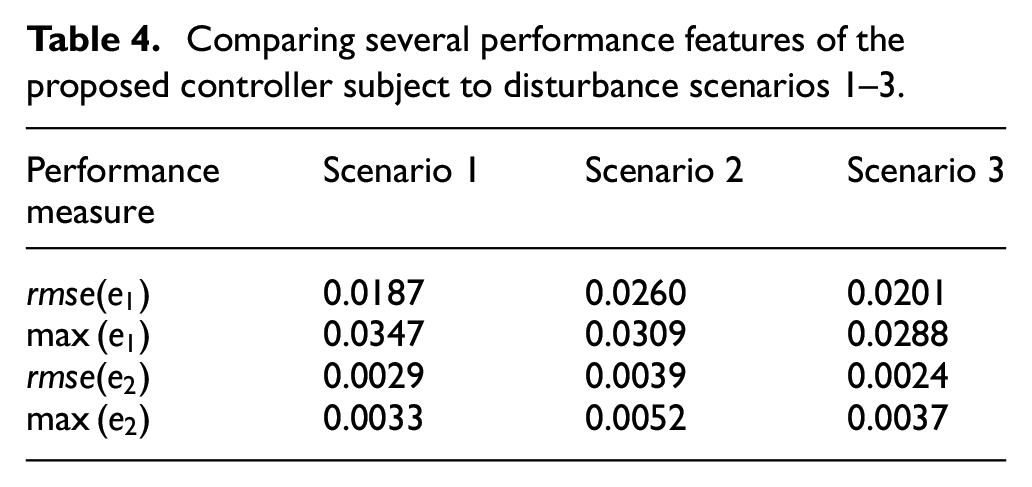
The rmse and maximum tracking error magnitudes for various scenarios are given in Table 4. The robustness of the proposed controller to withstand the effect of different disturbance functions is promoted, and the effectiveness of the developed framework for the system exposed to external disturbances and parametric uncertainties has been guaranteed. Figure 9 presents the results of the path-tracking performance in terms of the lateral offset during a separate emergency maneuver (S-shaped curve test). In terms of the obtained results, compared to the benchmarking T2FNN method, 11 the proposed controller holds a better capacity in following the reference trajectory. It is observed that between t = 4 s and 6 s, the benchmarking T2FNN produces a large overshoot, which diminishes the tracking performance and the vehicle’s return to the desired trajectory. However, the proposed controller in the current research deals with the disturbance effect and the parametric uncertainties while minimizing the tracking error to an infinitesimal bound (See Figure 9).
Comparing several performance features of the proposed controller subject to disturbance scenarios 1–3.
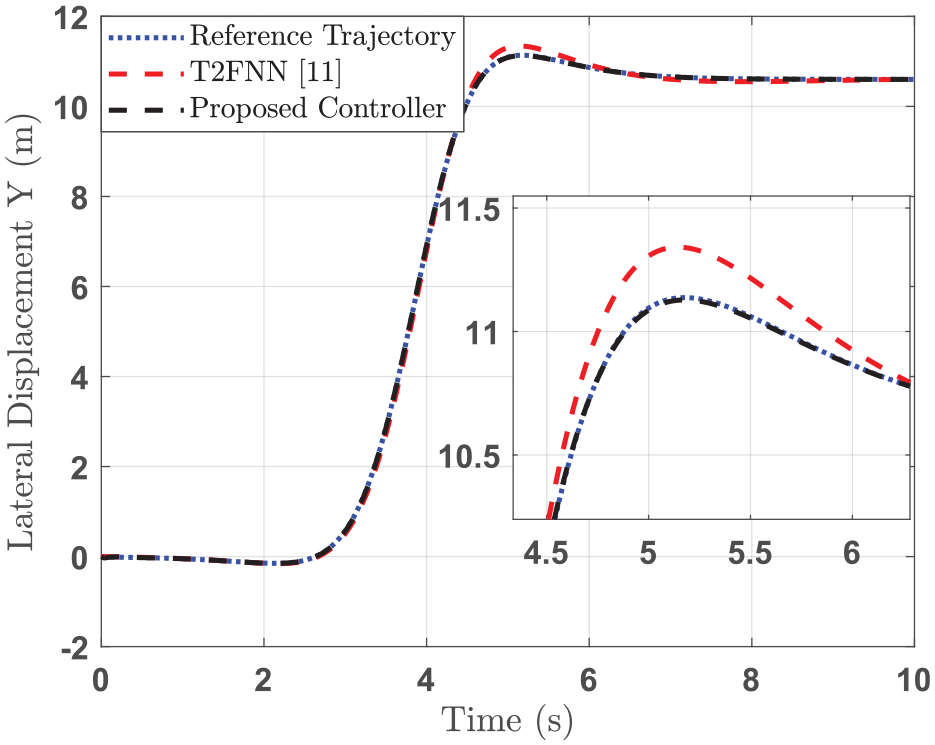
Time-histories of proposed controller’s performance for the lateral path-tracking compared to the benchmarking algorithm. 11
Conclusions
This paper contributes to building knowledge on designing robust adaptive control systems for high-speed autonomous vehicles when the system dynamics are fully unknown. This is significant because, in many previous relevant studies on autonomous vehicles’ path-tracking performance, only several model parameters or disturbances were assumed unknown. A robust NN-based AISMC controller and a robust state observed were conceived to accomplish the desired tracking performance subject to external disturbances and parametric uncertainties. A Lyapunov stability theorem was employed to investigate the stability of the developed framework and derive the adaptation laws. This study utilized two distinct S-shaped and J-shaped critical maneuvers subject to disturbances, parametric uncertainties, and high speeds to demonstrate the effectiveness and robustness of the proposed method. Based on the obtained results, it was observed that the conceived framework, compared to previously reported studies, holds the ability to yield a reasonably considerable path-tracking performance during various maneuvers and operating conditions.
Footnotes
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.