
Abstract
The modeling of the magnetic field, as well as the amplitude prediction and source analysis of torque ripple, are the theoretical basis to reduce the vibration and noise of electric motors. An analytical model of electromagnetic torque of surface permanent magnet motors considering current harmonics, which is capable of purely analytical calculation and theoretical analysis, is proposed in this paper. The open-circuit magnetic field solution considering the stator slot is performed by using the analytical conformal mapping along the deformed solving path, allowing more accurate prediction of the cogging torque. The armature reaction field is derived under any current condition with current harmonics. So far, the analytical model of electromagnetic torque is established, and the purely analytical calculation of torque value and the theoretical analysis of torque ripple characteristics are implemented in an 8-pole-24-slot surface permanent magnet motor used for the propulsion of light electric vehicles. The generation mechanism of constant torque and torque ripple is clarified both under sinusoidal current and harmonic current. Furthermore, the effect of the stator skew slot on the motor torque is well explained to demonstrate the utility of the proposed model. It is found that the skew slot is almost ineffective in mitigating the torque ripple caused by current harmonics.
Keywords
Introduction
Due to the high efficiency, high power density and simple control algorithm, surface permanent magnet (PM) motors are widely used in various scenarios such as household appliances and vehicle actuators.1–3 In electric vehicles (EVs), the absence of an internal combustion engine makes the electromechanical system a more important source of vibration and noise. The traction motor and various auxiliary motors are significant in generating noise, vibration and harshness (NVH) problems in the electromechanical system. 4 The electric motors are expected to provide higher output torque and better NVH quality in these application scenarios to ensure the health and comfort of passengers, while the major source of structure-borne noise is the torque ripple. 5 The prediction of instantaneous torque value and analysis of torque order characteristics are significant since the amplitude and order characteristics of vibration and noise play an equally important role in the initial design and optimization of the motor. The non-sinusoidal PM and armature reaction magnetic fields, as well as the current harmonics, are two of the most important factors contributing to the motor torque ripple, 6 thus they deserve to be analyzed in detail.
Existing methods to solve the problems related to motor performance are mainly classified into analytical method and finite element (FE) method. 7 The former is usually at the expense of accuracy based on many assumptions but has incomparable advantages over the latter in terms of computational efficiency and theoretical analysis. For the torque calculation, the two main analytical methods are the virtual work principle and the Maxwell stress tensor method (MSTM). 8 The virtual work principle is more like a semi-analytical method since it requires raw data of motor flux linkage or magnetic stored energy which can be more conveniently obtained through the finite element analysis (FEA). 9 The MSTM, which can predict the motor torque and electromagnetic force using the radial and tangential flux densities to analyze both the air- and structure-borne noises, is relatively widely used in analytical method. Therefore, great efforts were made by many scholars to solve the air gap magnetic field.
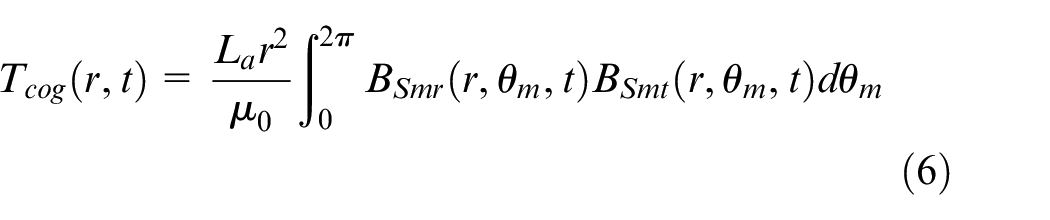
A two-dimensional (2-D) analytical model is required for the motor with a large air gap like the surface PM motor and the tangential flux density is important for torque analysis. The slotless open-circuit magnetic field with different magnetization directions was solved by Zhu et al.10–12 and the slotless armature reaction field was solved by Zhu and Howe 13 and Wang et al., 14 both in polar coordinates. To consider the stator slot, the analytical conformal mapping was initially utilized to obtain the relative permeance function, 15 but the slotted air gap tangential flux density remained unsolved. Thereafter, the complex relative permeance was proposed by Zarko et al. 16 to take the slotting effect on both the radial and tangential components of the flux density into account and this concept was then widely used by many literatures17–21 for analytical calculation and theoretical analysis. However, these literatures neglected that the complex relative permeance solved by the analytical conformal mapping in one slot pitch suffers from the deformation, 22 which may have a great impact on the accuracy of analytical calculation. To solve this problem, the numerical Schwarz-Christoffel (SC) conformal mapping, usually solved with the help of MATLAB SC Toolbox, was used.23–25 Alternatively, the magnet field of slotted PM motors can also be obtained by the subdomain method,26,27 in which the governing functions were solved in all subdomains and the field was then obtained by using the boundary conditions. Recently, hybrid field models that combined the above traditional methods with the magnetic equivalent circuit (MEC) have been favored by many researchers in the study of saturated motors,17,21,28,29 since the nonlinearity of the iron core can easily be considered by the MEC method. Nevertheless, the numerical SC conformal mapping, subdomain method and hybrid field models all pursue higher accuracy at the cost of simplicity and practicality and are oriented toward analytical calculation, unsuitable for theoretical analysis. Moreover, the influence of current harmonics is rarely discussed in these methods.
A concise and practical analytical model of electromagnetic torque of surface PM motors considering current harmonics is proposed in this paper. There are two main contributions. Firstly, the deformation of the solving path caused by the analytical conformal mapping is considered, which makes the purely analytical calculation of electromagnetic torque more accurate. Secondly, considering current harmonics, the generation mechanism of constant torque and torque ripple is analyzed in detail, which lays a foundation for torque ripple suppression. The paper is organized as follows. In Section 2, the analytical conformal mapping is used for the consideration of the stator slot, and the deformation is relaxed by adopting the deformed solving path to calculate the slotted open-circuit magnetic field. In Section 3, considering current harmonics, the instantaneous torque value is analytically calculated, and the generation mechanism of constant torque and torque ripple is theoretically analyzed. The effect of the stator skew slot on the motor torque is finally analyzed in Section 4, exhibiting good utility of the proposed analytical model. Some conclusions are summarized in Section 5.
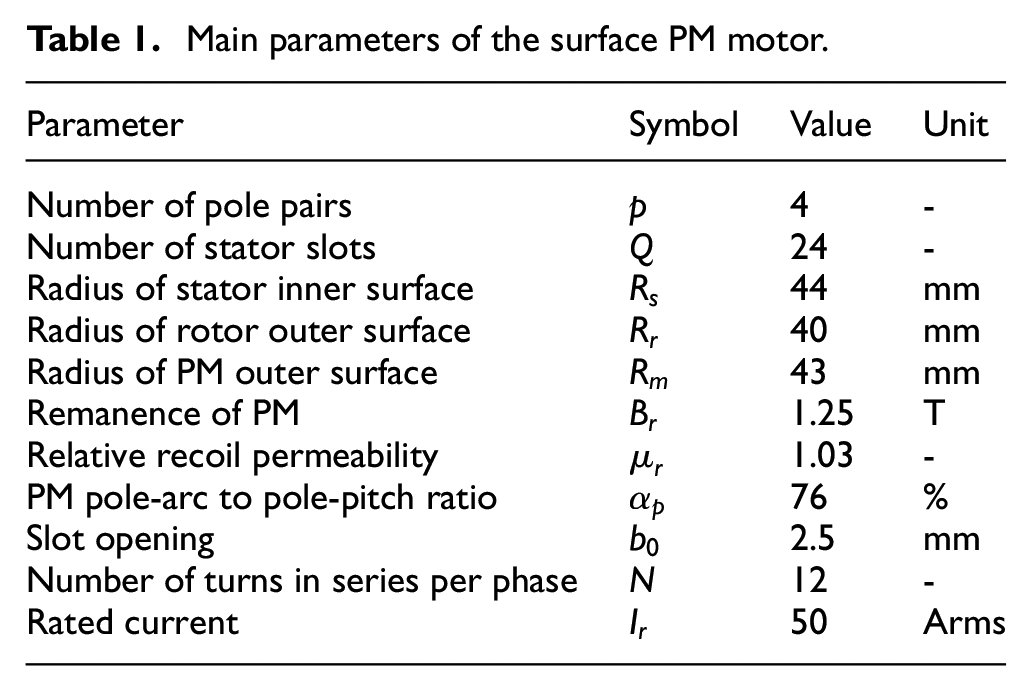
Some assumptions are firstly made to simplify the analysis as follows: (1) constant relative recoil permeability of the PM; (2) infinite relative permeability of the iron core; (3) neglected end effect; and (4) rectangular slot with infinitely depth. The study object in this paper is an 8-pole-24-slot surface PM motor manufactured for the propulsion of light EVs and its main parameters are listed in Table 1.
Main parameters of the surface PM motor.
Open-circuit magnetic field and cogging torque
Open-circuit magnetic field without slots
Considering the rotation of the rotor, the open-circuit magnetic field without stator slots can be derived by solving the Laplacian and Poissonian equations in polar coordinates and expressed by Fourier series as follows:

where
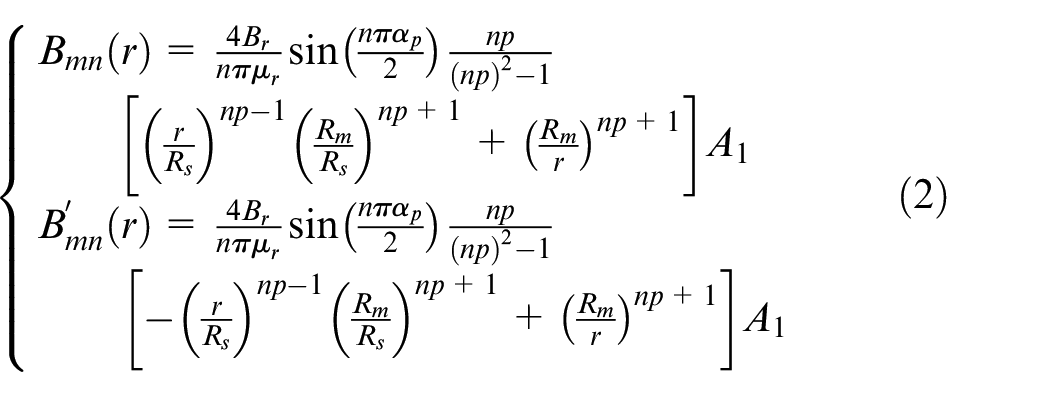
When radial magnetization is adopted in the PM, the amplitudes in (1) can be obtained as10,11

Complex relative permeance
In polar coordinates, the complex conjugate of the complex relative permeance is defined as the ratio of the slotted air gap flux density to the slotless air gap flux density, where the flux density is expressed in the complex form. As shown in Figure 1, the slotted S plane can be converted to the slotless K plane by using the analytical conformal mapping. As a result, the real part

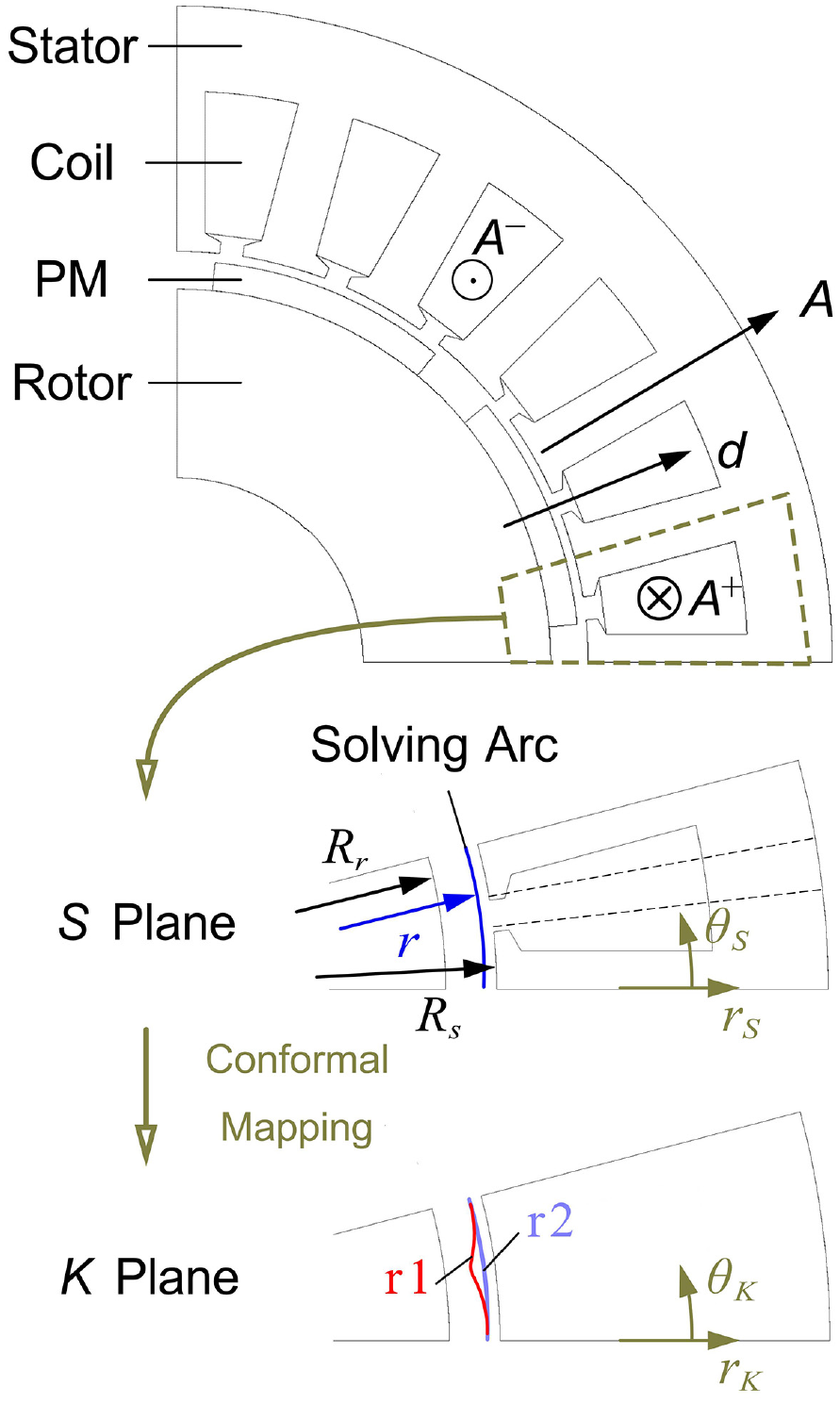
Cross section of the motor and analytical conformal mapping.
where,
Deformation of conformal mapping and cogging torque
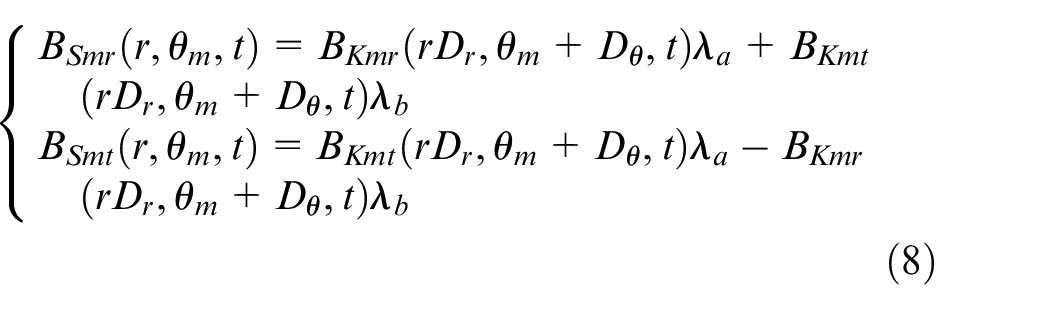
The radial and tangential air gap flux densities of the open-circuit magnetic field in the slotted machine can be expressed as
According to the MSTM, the motor cogging torque can be derived from
where
As shown in Figure 1, the stator slot with infinite depth in the S plane is transformed into the stator arc with finite length in the K plane by the analytical conformal mapping,
22
resulting in the deformation of the solving arc in the air gap. In other words, if the slotted air gap flux density at the point with polar coordinate
When the solving arcs of different radii in the S plane are transformed into the solving paths in the K plane, the deformation can be quantified as

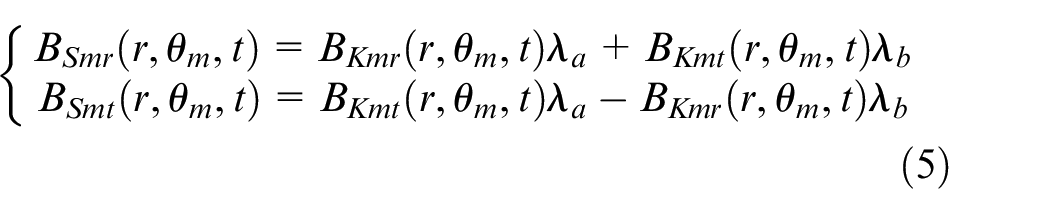
which are depicted in Figure 2. It can be seen from Figure 2 that the closer to the stator slot, the greater the deformation. Since the deformation at the geometric radius where the PM is located is relatively small and the air gap magnetic field generated by the PM considering the deformation is difficult to solve, only the deformation of the solving arc is considered. In this case, (5) becomes
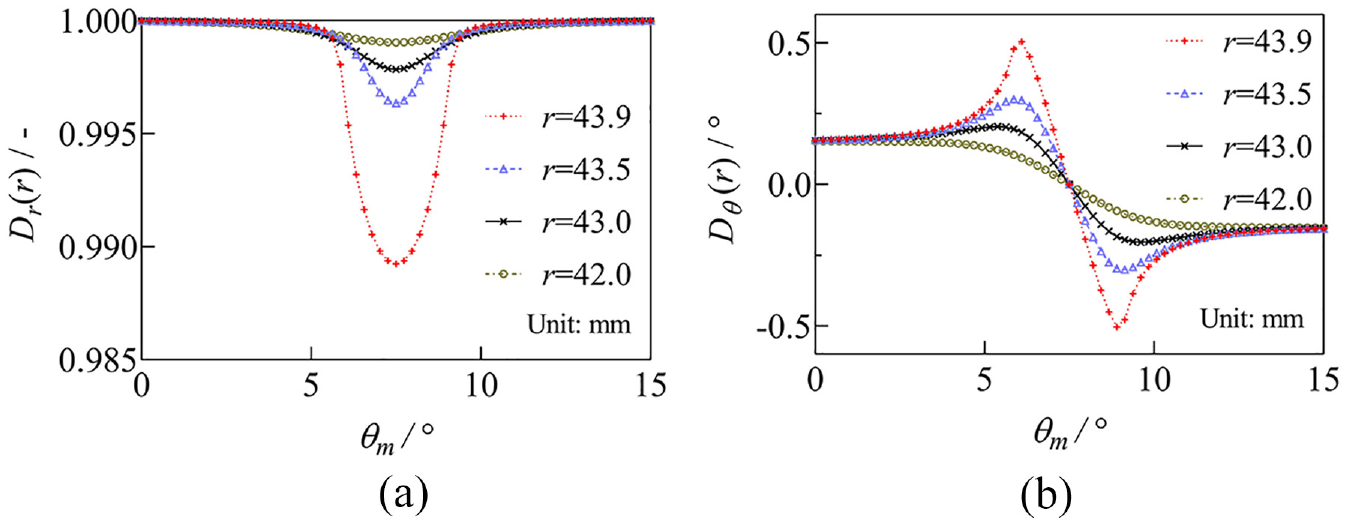
Deformation of solving arcs with different radii in the S plane: (a)
In the K plane, the solving path used in (8) and that used in (5), marked with symbols r1 and r2 respectively, are schematically drawn in Figure 1. The solving path r1 means that the deformation of the solving arc in the S plane is considered in the K plane, which is not considered by r2. The solving path r2 was taken by many literatures17–21 since the deformation was ignored. As a result, the analytical calculation accuracy of electromagnetic torque was limited.
The radial and tangential components of the open-circuit air gap flux density considering slots at r = 43.5 mm are shown in Figure 3 (The solving radii r of the subsequent results in this study are all 43.5 mm.). When the d-axis is at
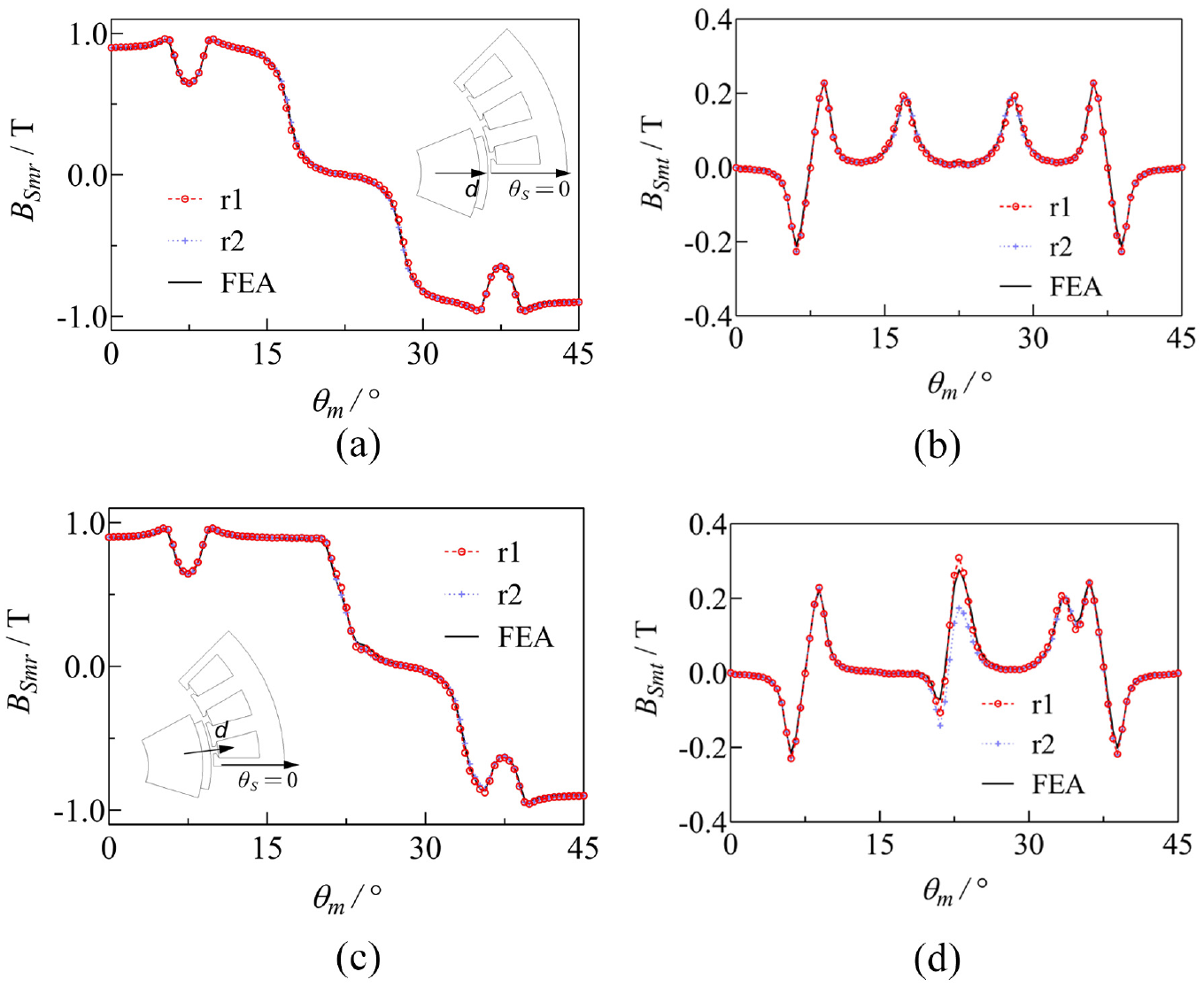
Slotted open-circuit air gap flux density at r = 43.5 mm: (a) radial flux density when d-axis is at
The analytical result and the FEA result of the cogging torque when the motor rotates at the speed of 1800 r/min are shown in Figure 4. Only the figure of one-sixth electrical period is shown because the period of the cogging torque is
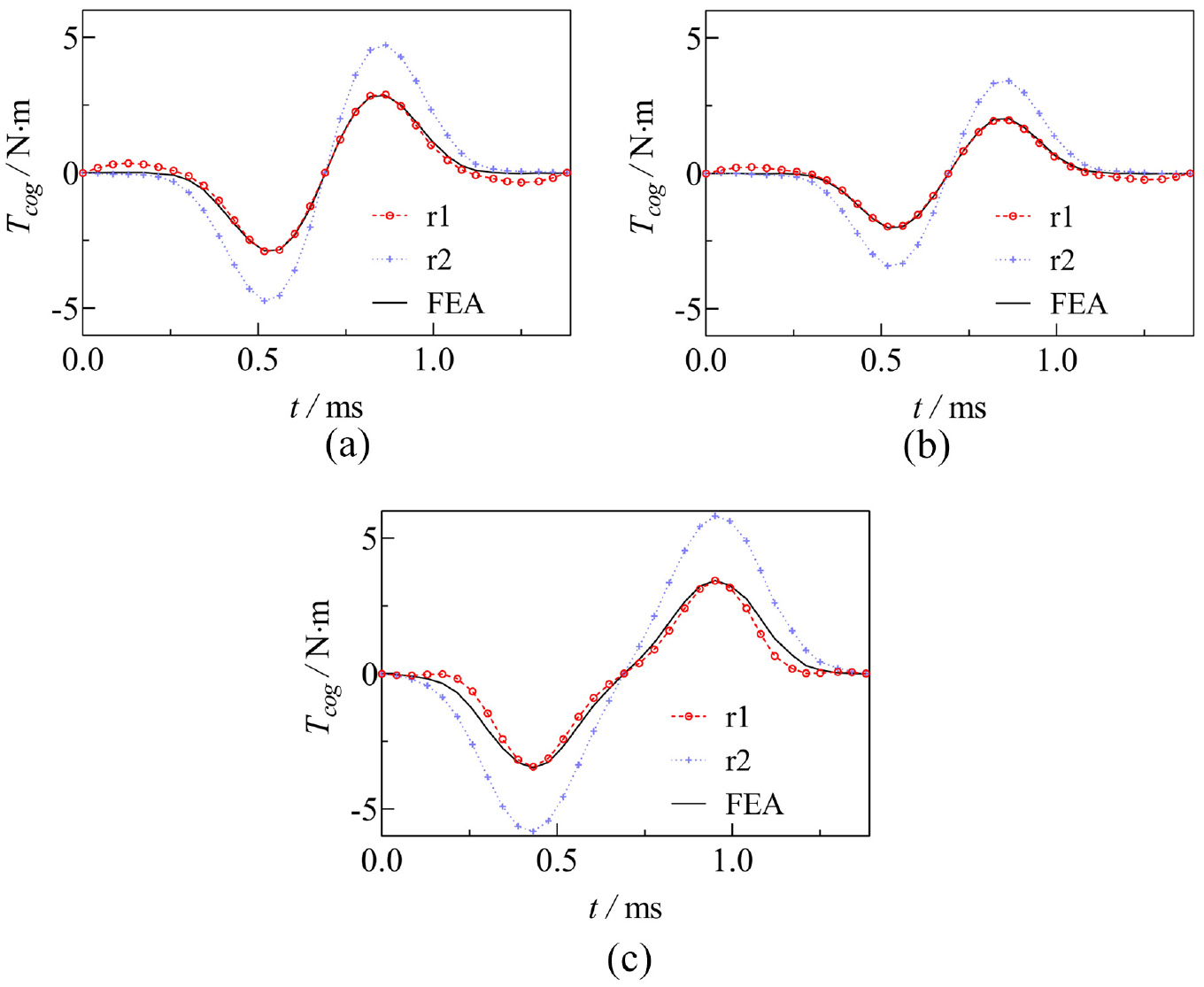
Cogging torque: (a)
Armature reaction field and electromagnetic torque considering current harmonics
Slotless armature reaction field of one phase winding
Neglecting the saturation, the coil in the stator slot is regarded as a uniformly distributed current sheet located on the smooth stator surface, the width of which is equal to the slot opening. Solving the Laplacian equation with boundary conditions in polar coordinates, the slotless armature reaction field in the air gap produced by a coil whose pitch is

where
Thus, the slotless armature reaction field in the air gap produced by one phase winding can be derived from the superposition principle as
where
It can be inferred that in (11) the radial and tangential flux densities are not equal to 0 only when
where
Slotless armature reaction field considering current harmonics
Rich harmonic components exist in the phase current of PM motors due to many factors such as the spatial harmonics, 30 the inverter deadtime effect 31 and the detection error of the rotor position sensor. 32 Considering these factors, the three-phase current can generally be expressed as
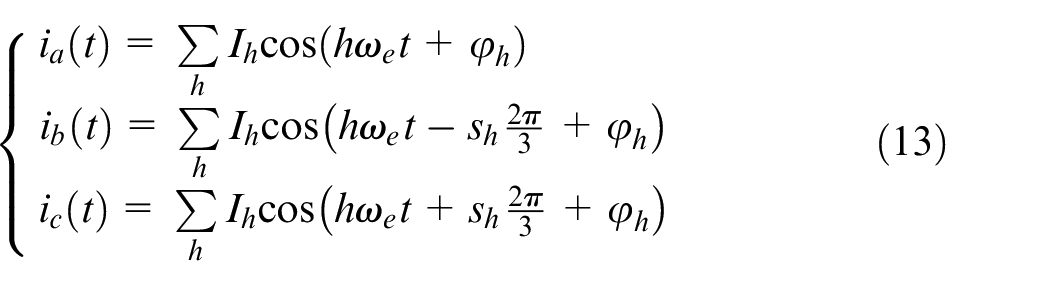
where
According to (12), the slotless armature reaction field in the air gap produced by the three-phase winding is
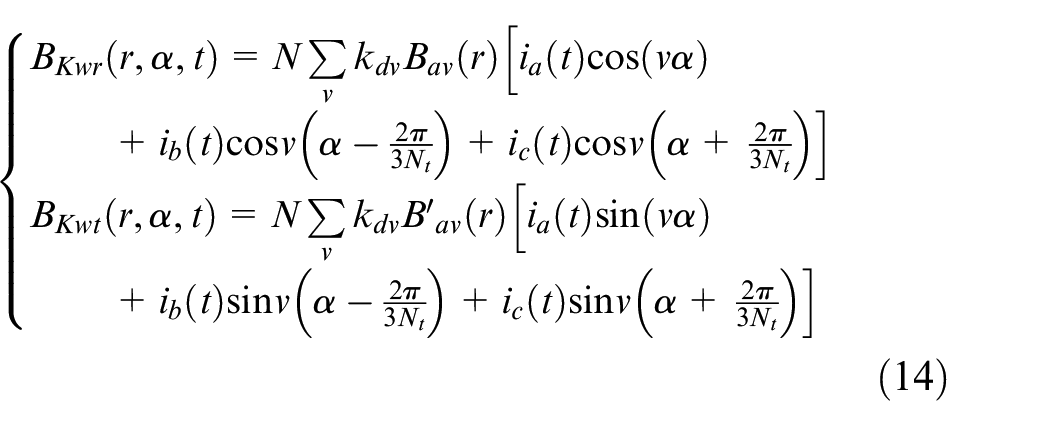
where
Substituting (13) into (14) leads to

It can be found that in (15) the radial and tangential flux densities are not equal to 0 only when
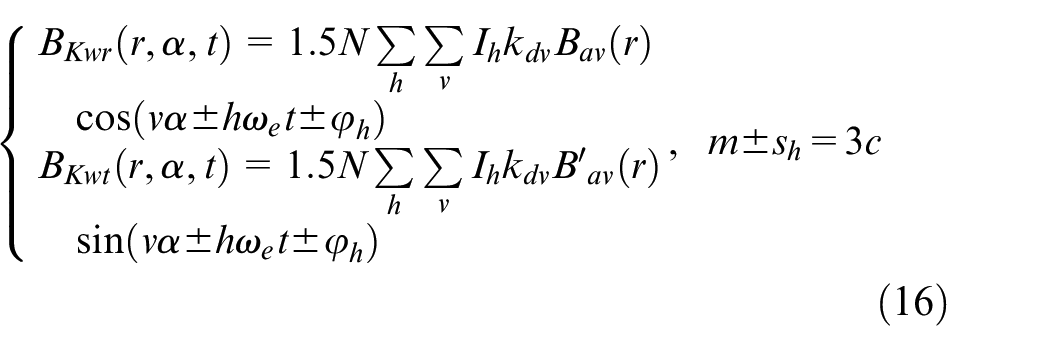
where
It can be seen that the decision of the positive or negative sign in (16) is related to
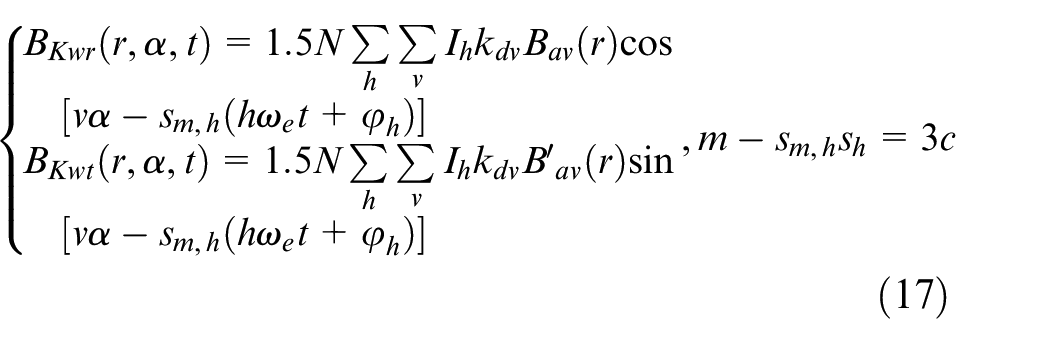
where
For the motor studied in this work,
where

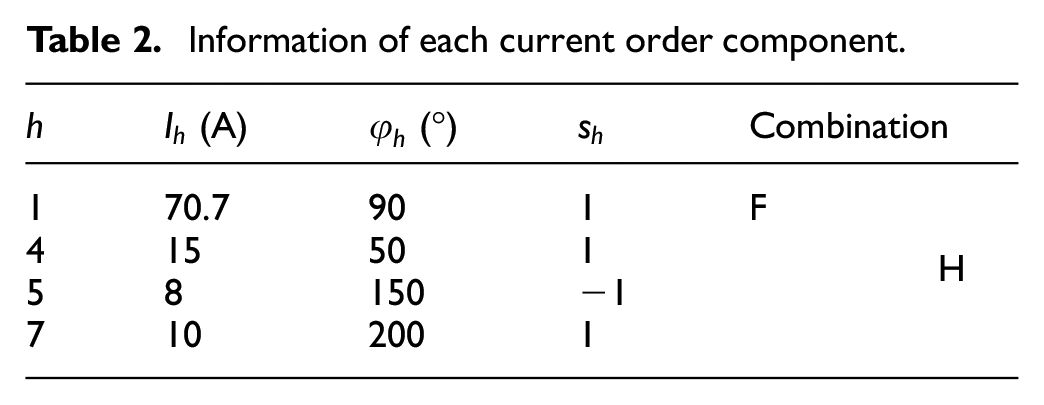
Without losing generality, it is assumed in this study that the three-phase current contains fourth, fifth and seventh harmonic currents, and the amplitude, initial phase and phase sequence of each current order component are shown in Table 2. The radial and tangential flux densities of the slotless armature reaction field produced by the three-phase winding are shown in Figure 5. The current conditions in Figure 5(a) and (b) are the combination F and H in Table 2, respectively. Only fundamental current is included in the combination F, while the fundamental and harmonic current components all exist in the combination H. It can be seen from Figure 5 that the radial and tangential flux densities obtained by the analytical method (AM), that is equation (18), are consistent with those obtained by the FEA.
Information of each current order component.
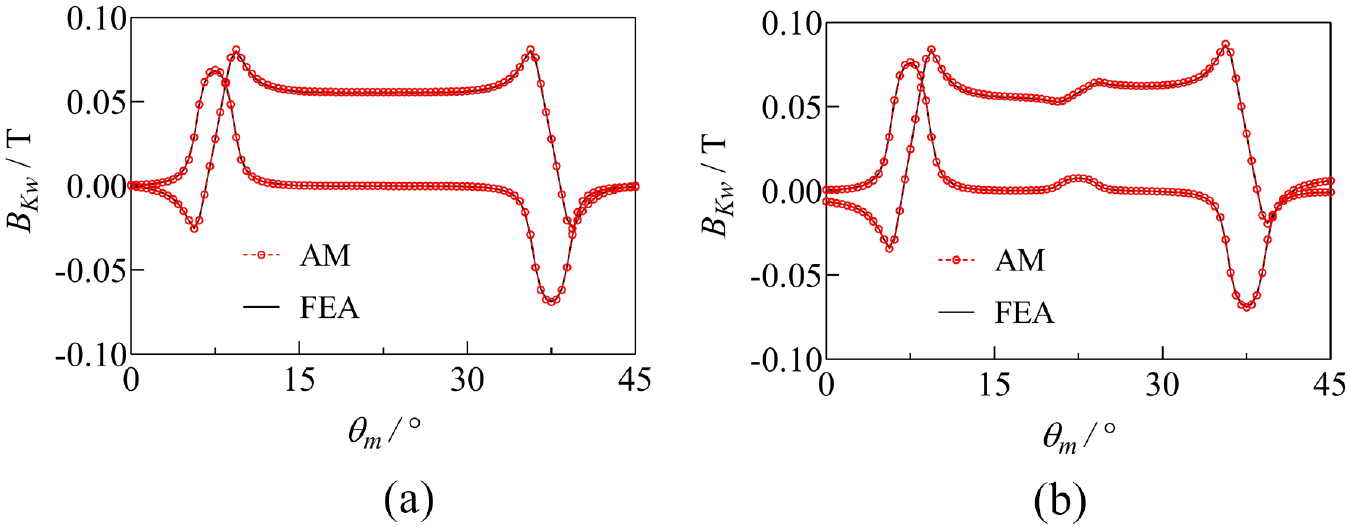
Flux density of slotless armature reaction field produced by the three-phase winding: (a) combination F and(b) combination H.
Electromagnetic torque prediction
The instantaneous value of electromagnetic torque and its amplitude spectrum when the rotor rotating speed is 1800 r/min are shown in Figure 6. The electromagnetic torque in one-third electrical period is depicted for clarity. “r1 + r2” indicates that the solving path r1 is taken in the slotless open-circuit magnetic field and the solving path r2 in the slotless armature reaction field. The meanings of “r1 + r1” and “r2 + r2” are analogized. It can be inferred from Figure 6 that adopting the solving path r1 in the slotless open-circuit magnetic field can improve the accuracy of electromagnetic torque prediction both in the average value and pulsating value, while the adoption of particular solving path in the slotless armature reaction field makes negligible difference. Therefore, “r1 + r2” is taken for better accuracy and lower computational burden. Because the d-axis and A-axis of the motor are in the position of
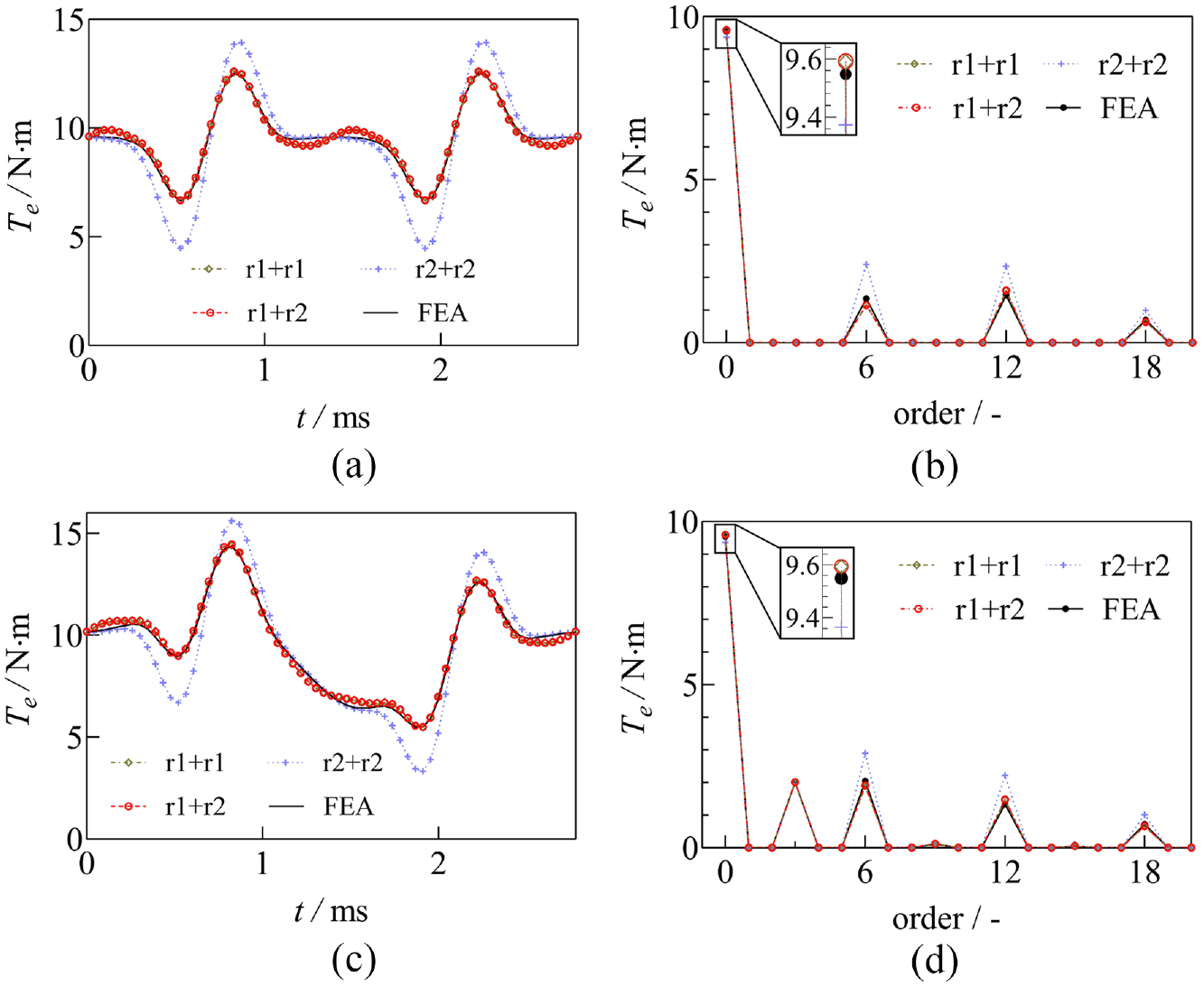
Electromagnetic torque and amplitude spectrum (Fundamental frequency is 120 Hz): (a) instantaneous torque value under current combination F, (b) amplitude spectrum under current combination F, (c) instantaneous torque value under current combination H, and (d) amplitude spectrum under current combination H.
The electromagnetic torque can be derived from the MSTM as

Moreover, as shown in Figure 6, the order characteristics of the motor torque are the same regardless of the solving path taken. Comparing Figure 6(b) and (d), it can be seen that the amplitude of the order component under the combination F has changed under the combination H due to current harmonics and new order components that don’t exist in Figure 6(b) are also generated in Figure 6(d). This will be explained in the next subsection.
Generation mechanism of electromagnetic torque
The order characteristics of torque ripple due to the stator slotting effect are the same as those of the cogging torque. Therefore, to simplify the theoretical analysis, the electromagnetic torque can be analyzed in the slotless motor and thus expressed as
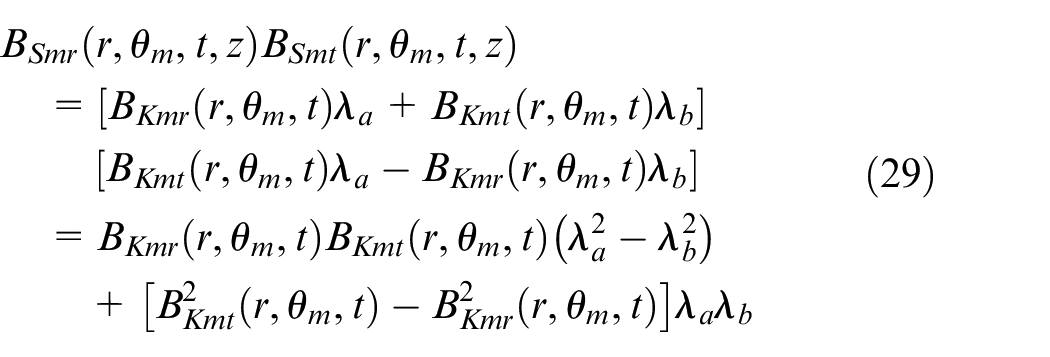
Substituting (1) and (18) into (22), after simplification one can get
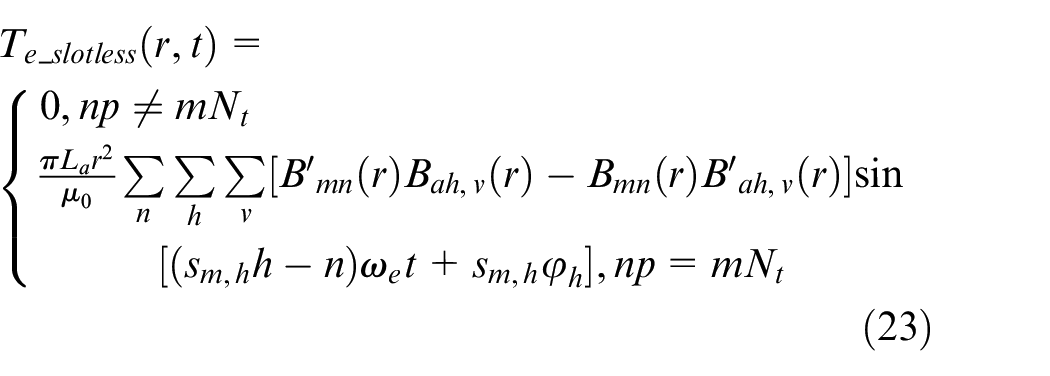
which reveals that the instantaneous torque value is not 0 only when
According to (23), for the motor studied in this work, the condition of torque generation is
when the motor is powered by the three-phase sinusoidal current. The constant torque is a result of the interaction between the spatial

where the order is defined with respect to the fundamental electrical frequency.
when the motor is powered by the three-phase current containing current harmonics. The constant torque can also be generated by the interaction between the spatial

where
Relationship between sm, h, m and c.
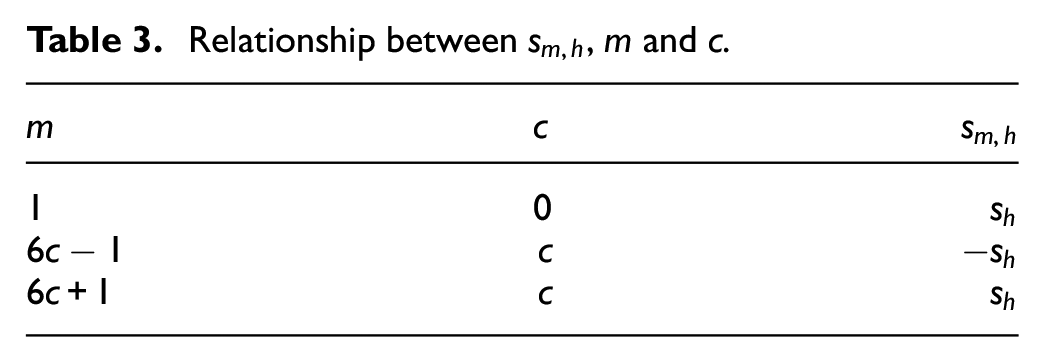
With (25) and Table 3, the order characteristics of torque ripple under any current condition with current harmonics can be theoretically analyzed. The phenomena in Figure 6 are explained as follows. The order of torque ripple produced by the fourth harmonic current is
Based on the above analysis, the mechanism of electromagnetic torque produced by the magnetic field can be briefly summarized as follows. Only the interaction between the PM field and the armature reaction field of the same spatial order can generate the electromagnetic torque. When the time order of the two magnetic fields is the same, the constant torque is generated, while when the time order of the two magnetic fields is different, the torque ripple is generated. The order characteristics of torque ripple are related to
Application case study: Stator skew slot
After the motor adopts appropriate stator skew slot, the cogging torque and torque ripple can be effectively reduced, so it is often used for motors of light EVs in mass production, 33 where the ripple rate of output torque is usually required to be less than 5% to achieve an excellent ride experience. In order to illustrate the practicality of the analytical model proposed in this study, this section theoretically analyzes the influence of the motor stator skew slot on the motor torque. The parameters of the motor are the same as those in Table 1.
Suppression of cogging torque
Let the motor axial direction be the z-axis, and the axial center plane is

thus, the corresponding real and imaginary parts of the complex relative permeance at the axial position z are
It should be noted that
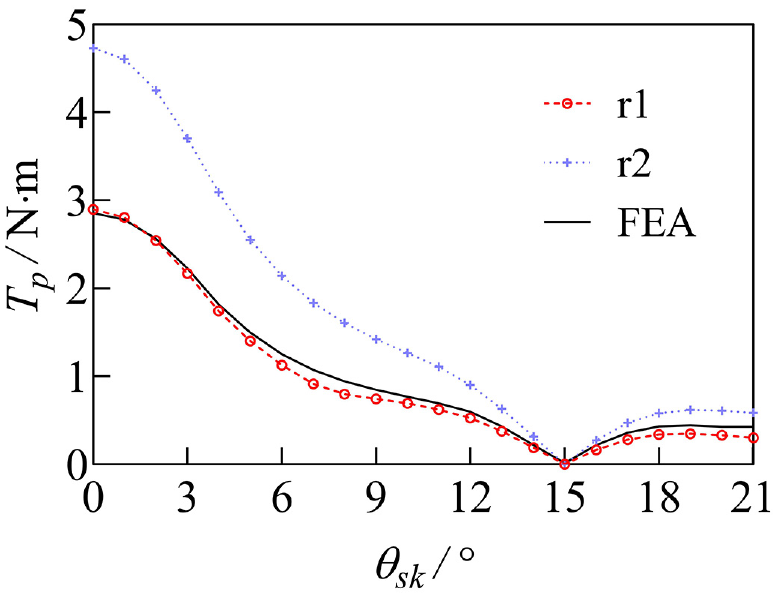
Peak values of cogging torque at different skew angles.
where
The term
where
It can be derived from (30) and (31) that
Average torque and suppression of torque ripple
When the stator slots are skewed by the skew angle
Substituting (1) and (32) into (22) leads to
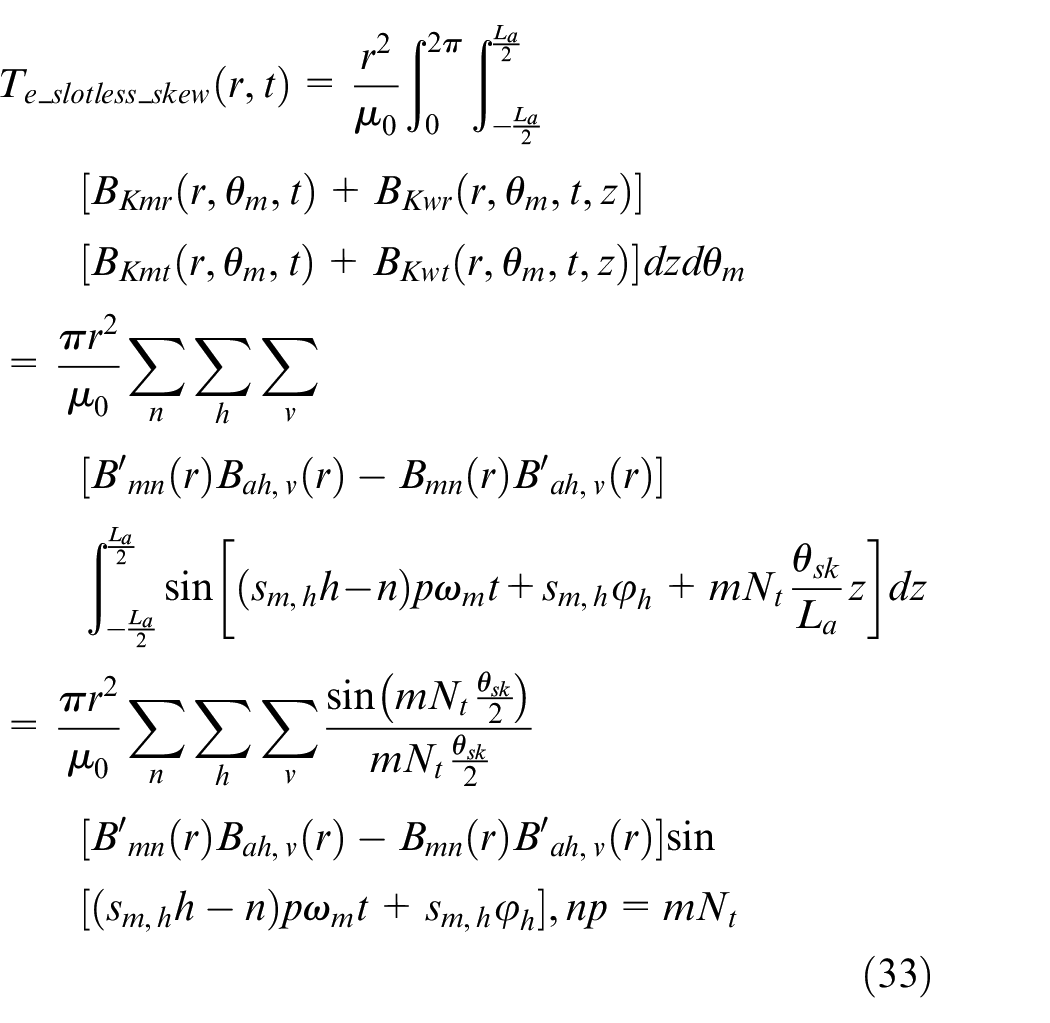
By comparing (23) and (33) it can be found that the torque component of the skewed machine, that is produced by the interaction between the spatial

The absolute values of the skew factor at different skew angles for some main values of
when the motor is powered by the three-phase sinusoidal current. As shown in Figure 8, applying skew slot can reduce the torque ripple caused by the spatial
when the motor is powered by the three-phase current containing current harmonics. The torque ripple caused by the spatial
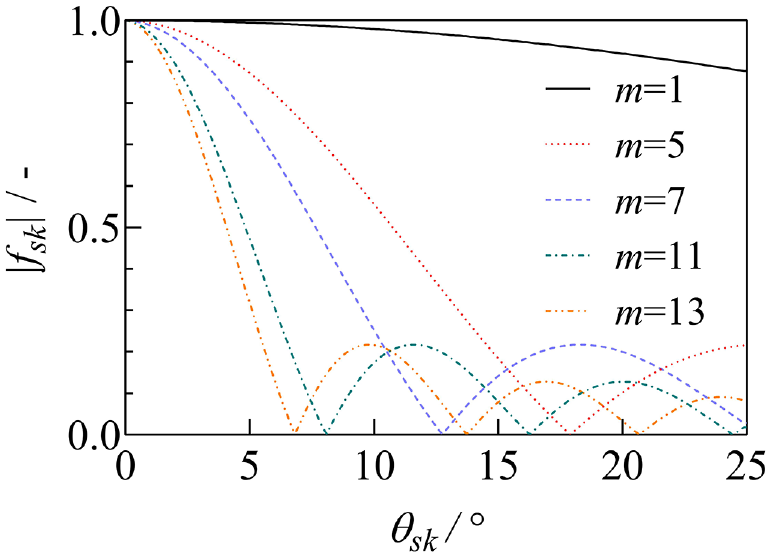
Absolute values of skew factor at different skew angles.
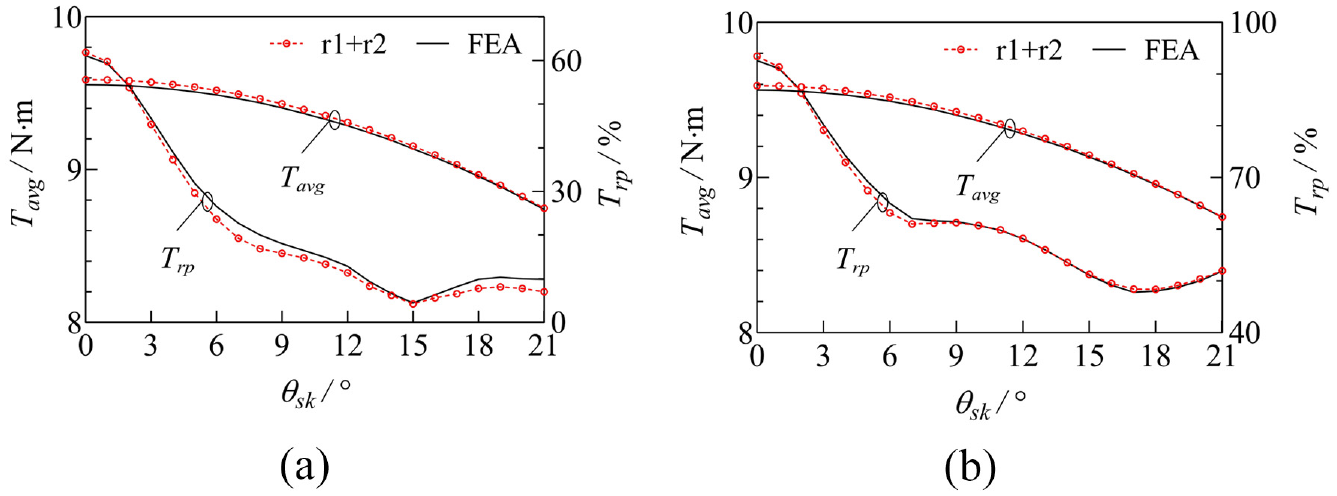
Average torque and torque ripple at different skew angles: (a) under current combination F and (b) under current combination H.
The torque ripple in Figure 9 is defined as

where
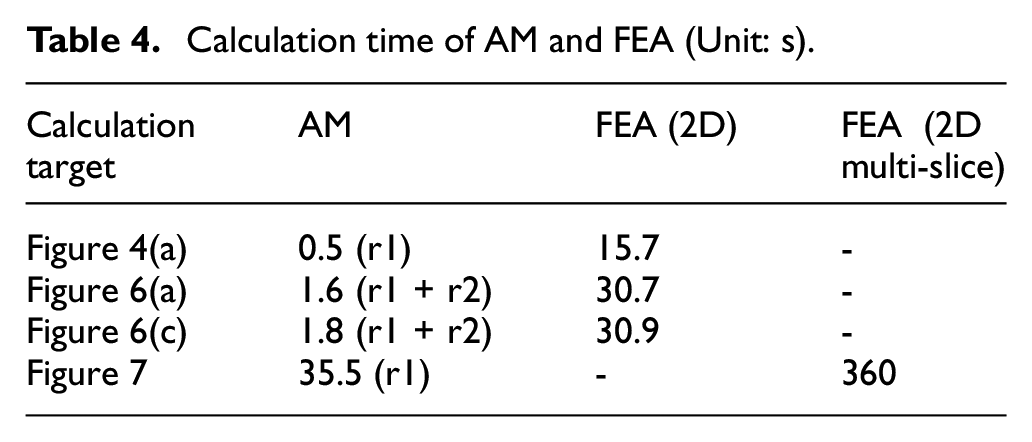
The calculation time of the AM and the FEA is shown in Table 4. The analytical model is implemented by using MATLAB script, where the number of axial segments, the maximum spatial order of the open-circuit magnetic field, the maximum spatial order of the armature reaction field and the maximum order of the complex relative permeance are 16, 31, 31, and 17, respectively. The number of the FE meshes is 6897 in the one-eighth FE model, and 2-D multi-slice technique with seven slices is utilized to account the skew slot, 34 while the number of slices in the AM is 16. The comparison shows that the AM can effectively relax the computational burden compared to the FEA and thus is suitable for the initial design and parameter optimization.
Calculation time of AM and FEA (Unit: s).
Conclusion
A concise and practical analytical model of electromagnetic torque of surface PM motors considering current harmonics is proposed in this paper, suitable for purely analytical calculation and theoretical analysis, and thus can be used for the initial design and torque optimization of the motor. The motor cogging torque as well as the electromagnetic torque considering current harmonics are predicted and the generation mechanism of constant torque and torque ripple is theoretically analyzed using the proposed method. Moreover, the influence of the stator skew slot on the motor torque is analyzed and predicted. The main conclusions are as follows:
The deformation of the solving arc is important in analytical calculation of the motor torque and should be considered in the slotless open-circuit air gap magnetic field, while the deformation in the slotless armature reaction field will not cause significant errors.
Only the interaction between the PM field and the armature reaction field of the same spatial order can generate the electromagnetic torque. When the time order of the two magnetic fields is the same, the constant torque is generated, while when the time order of the two magnetic fields is different, the torque ripple is generated. The order characteristics of torque ripple are related to
It is generally known that the skew angle of one slot pitch can effectively suppress the cogging torque and the torque ripple caused by the fundamental current simultaneously. However, through the theoretical analysis using the proposed model it is newly found that the skew slot is almost ineffective in mitigating the torque ripple caused by current harmonics.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by a Grant (Project 51875410) from the National Natural Science Foundation of China.