
Abstract
Accurate estimation of road peak adhesion coefficient is of great significance in vehicle active safety systems. In order to prevent the vehicle from running out of control in actual driving process, the estimation algorithm should be able to adapt to various working conditions, and transmit estimated information of road peak adhesion coefficient to Electronic Control Unit (ECU) of the vehicle timely and accurately. Therefore, a new preprocessment method for the fusion estimation algorithm of road adhesion coefficient is proposed. The core of this method is the equal ratio relationship between the longitudinal, lateral peak adhesion coefficients and the utilization adhesion coefficient under adjacent typical roads. According to this relationship, this method accomplishes normalization of the tyre model in the form of introducing parameters from the outside, so that the tyre model can be combined with the filtering algorithm to be applied to estimation, which solves the problem that the precise tyre model cannot be used for road adhesion coefficient estimation due to its complex construction. This method can adapt to most of tyre models in the field of vehicle dynamics. In addition, the existing estimation algorithms need sufficient excitation (when the comprehensive slip ratio is 0.15–0.20) to estimate the accurate road peak adhesion coefficient. This method can greatly reduce the system error caused by insufficient road excitation, and can also obtain accurate estimation results when the excitation is insufficient. Finally, in order to verify the preprocessment method, the magic formula tyre model is used to describe the tyre characteristics. After processing by the preprocessment method, the road peak adhesion coefficient is estimated in combination with Unscented Kalman Filter (UKF). The high accuracy and timeliness of the estimated results in simulation and real vehicle tests verify the effectiveness of the preprocessment method.
Keywords
Introduction
With the gradual realization of Intelligent Vehicles (IV), vehicle active safety systems are also constantly developing and popularizing, and have become an important part of ensuring vehicle driving safety. Among them, real-time estimation of adhesion coefficient between tyre and road surface is of great significance to improve the performance of vehicle control systems such as anti-lock braking system (ABS), electronic stability program (ESP), and traction control system (TCS).1–4
In recent years, scholars have carried out extensive research on road adhesion coefficient estimation methods, and basically formed two kinds of estimation algorithms: cause-based and effect-based. The cause-based algorithm predicts road adhesion coefficient by measuring road surface roughness or road lubrication and combining experience. 2 Literatures5,6 use optical sensors to measure the degree of light absorption and scattering by road surface, so as to estimate the road surface adhesion coefficient. Leng et al. 7 accomplished road recognition and classification by extracting road color and texture features. The effect-based method can be divided into two categories. The one is mainly to establish a mapping relationship between tyre deformation, noise characteristics measured by various sensors and adhesion coefficient.2,8,9 Pohl et al. 10 measured the friction between tyre and road surface by monitoring the deformation and movement of tread elements during the contact between tyre and road; Alonso et al. 11 proposed an asphalt state classification system based on real-time acoustic analysis of tyre/road noise, and used vector machine to classify asphalt dry and wet states. Singh et al. 12 used the measured tyre vibration frequency response of intelligent tyre to characterize the terrain, which can realize the estimation of road friction coefficient under the condition of extremely lower levels of force utilization. The advantages of these methods are that the detection range of identification is wide, and it has a predictive effect. 5 However, the sensors used in literatures5–12 are expensive and vulnerable to environmental impact,1,5,9,13,14 which makes these methods hard for wide application in vehicles.
Therefore, scholars have shifted their attention to the other one of the effect-based method. By designing the road adhesion coefficient estimator and using the vehicle dynamic response as input, the road adhesion coefficient is estimated. Due to the practicability and high precision of this kind of algorithm, a lot of researches has emerged. From the perspective of vehicle dynamics research, this method can be divided into three categories: longitudinal, lateral, longitudinal and lateral combination conditions.
In the aspect of longitudinal condition, Yi et al. 15 established an observer-based least squares method and filtering regression method to estimate the road adhesion coefficient under longitudinal conditions. Xia et al. 16 used the improved Burckhardt tyre model to describe the longitudinal slip characteristics of tyres. By introducing a new state variable, a nonlinear estimation method for estimating the longitudinal tyre force and the maximum road friction coefficient simultaneously is proposed. Chen et al. 17 proposed a longitudinal collision avoidance safety distance model for logistics vehicles considering road slope and road adhesion coefficient. Based on the relationship between slip rate and adhesion coefficient, the least square method is used for multivariate fitting to estimate the adhesion coefficient of road. Based on the modified Burckhardt tyre model, Leng et al. 7 designed a disturbance observer for tyre force and tyre-road peak adhesion coefficient. A tyre-road peak adhesion coefficient estimation method based on vehicle camera is designed. The fusion strategy of dynamic estimator and visual estimator is designed based on the gain scheduling method.
In the aspect of lateral condition, Ma et al. 18 proposed a single-wheel self-aligning torque (SAT) iterative algorithm to estimate the road adhesion coefficient of the front wheel, which is only used in steering conditions. Liang et al. 19 designed a nonlinear adaptive observer to estimate the road friction coefficient by combining the estimated total alignment torque and the front axle lateral force, and proposed criteria for judging when to update the estimated road conditions. The algorithm has strong stability and robustness. Liu et al. 20 proposed a method that firstly combines auxiliary particle filter with iterative extended Kalman filter (APF-IEKF) to filter non-Gaussian noise, and then uses iterative algorithm to optimize the results of the first step. The estimation speed and accuracy are improved. Although the accuracy and convergence rate can be optimized simply based on longitudinal or lateral, it cannot cover all the working conditions and the scope of application is narrow. In the actual driving process of the vehicle, there are few conditions involving only longitudinal or lateral, and most conditions are longitudinal and lateral joint conditions. In addition, in complex conditions, such as turning braking, turning driving, etc., due to its high risk, active safety control technology has greater demand, so it is more necessary to estimate the road peak adhesion coefficient. Therefore, it is particularly important and urgent to develop a road adhesion coefficient estimation algorithm for combined conditions.
In the aspect of longitudinal and lateral combination conditions, Li et al. 21 identified the actual working condition by using sensor signals, and obtained the road adhesion coefficient of braking, driving and steering conditions. The comprehensive road adhesion coefficient under complex conditions was obtained by integrating the three. According to practical situation, the estimation of road adhesion coefficient is obtained through the allocation and cooperation among ABS, TCS, and active yaw control system (AYC), which has strong engineering application significance. However, the algorithm relies on three active safety technologies for the estimation and identification of the full working conditions, and requires a wide range of measurement signals, which has high requirements for vehicle configuration. Ahn et al. 22 proposed the estimation method of road adhesion coefficient under four conditions of mid-lateral, large-lateral, small-longitudinal, and large-longitudinal excitations, and realized integration by switching logic for estimation of various working conditions. It introduces the construction of five observers covering all working conditions in detail, which have wide estimation range and strong stability. However, due to the method needs to switch between models, it may lead to the problem of large memory occupation of the core unit of the vehicle and long convergence time. Chen et al. 23 used available signals to observe longitudinal and lateral tyre forces. By establishing a polynomial function relationship between tyre force and road adhesion coefficient, the longitudinal and lateral road adhesion coefficients were estimated respectively. The comprehensive road adhesion coefficient was obtained by weighted fusion of mean square error. Compared with the first two methods, this kind method is simple, has short calculation cycle and strong robustness, but does not consider incentive sensitivity. In the case of sufficient incentives, ideal estimated results can be achieved in short time; however, when the excitation is weak, such as uniform linear motion and small lateral motion, accurate estimation results may not be obtained. It should be pointed out that simple and practical, strong robustness, fast convergence, and strong incentive sensitivity should be the proper properties of the estimation algorithm. These three methods all consider longitudinal, lateral and the coupling of longitudinal/lateral combined conditions, covering the whole driving condition of the vehicle. However, because of the different methods used, they also show different effects, they have their own advantages and disadvantages in the above four characteristics. In summary, it is not difficult to find that the existing methods are not perfect, and a better estimation algorithm is still needed to estimate the peak adhesion coefficient of the road.
Based on the above problems, the main contribution of this paper is the proposal of the equal ratio relationship between the longitudinal and lateral peak adhesion coefficients of adjacent typical road surface and the utilization adhesion coefficient according to the Kiencke tyre model. The above relationship is verified by comparing the variation surfaces of longitudinal, lateral road adhesion coefficients with longitudinal slip rate and tyre slip angle of the typical roads. According to this relationship, a simple and easy-to-implement tyre model normalization framework is built. This is of great significance for the application of high precision and high complexity tyre model in estimation. In fact, few simple tyre models can accurately reproduce the friction performance of the tyre-road interface while maintaining a simple form. 23 This is also the dilemma faced by the complex tyre model in application. The normalization framework can accomplish the normalization of the tyre model by introducing parameters from the outside, avoiding the complex internal parameters, So it can adapt to the most of tyre models in the field of vehicle dynamics, which means that the most of tyre models can be used to estimate the road peak adhesion coefficient. Since different tyre models have high fitting accuracy in different fields, the framework extends the scope of application of road peak adhesion coefficient estimation algorithm based on tyre model greatly. In addition, in terms of incentive sensitivity, the existing estimation algorithms often need large incentives to estimate the accurate road peak adhesion coefficient, and this large incentive has a great negative impact on vehicle handling stability and comfort. 2 Because the equal ratio relation can avoid a wide range of system errors, it can get more accurate recognition results even at small slip rate, which ensures high sensitivity of the algorithm to excitation and the robustness under nearly all working conditions.
The MF tyre model is selected as the representative of the tyre model with high precision and high complexity. The longitudinal and lateral road peak adhesion coefficients of the road are estimated by combining the vehicle dynamics model and UKF. And the comprehensive road peak adhesion coefficient is obtained by fusion. The above algorithms are verified in simulation and real vehicle tests.
The other parts are as follows : The first section mainly introduces the operation framework of the fusion estimation algorithm for road peak adhesion coefficient based on preprocessment method. The second section introduces all the models involved in this paper. The third section introduces the principle, theoretical analysis and verification of preprocessment algorithm. The fourth section introduces the implementation steps of fusion estimation strategy for road peak adhesion coefficient based on preprocessment algorithm. The fifth and sixth sections are simulation and experimental verification. The seventh section is the conclusion.
Algorithm framework for road peak adhesion coefficient estimation
The logical framework of the algorithm is shown in Figure 1. The required signal input was obtained by CarSim/Simulink simulation or real vehicle test, and the signal was used to calculate the dynamic parameters. Combined with the Kiencke and Nielsen tyre model,24,25 the equal ratio relation between the longitudinal/lateral peak adhesion coefficients of the adjacent typical roads and the utilization adhesion coefficients was derived. The normalized formula of tyre force is derived and used as the normalized framework. The MF tyre model is selected to estimate the tyre force and embedded into the normalized framework. Combined with three DOF vehicle dynamics model, the system equation is obtained. Through UKF,26,27 the estimation results of longitudinal and lateral road peak adhesion coefficients of four wheels are obtained. Through the treatment of equation (36), the comprehensive road peak adhesion coefficient is obtained.
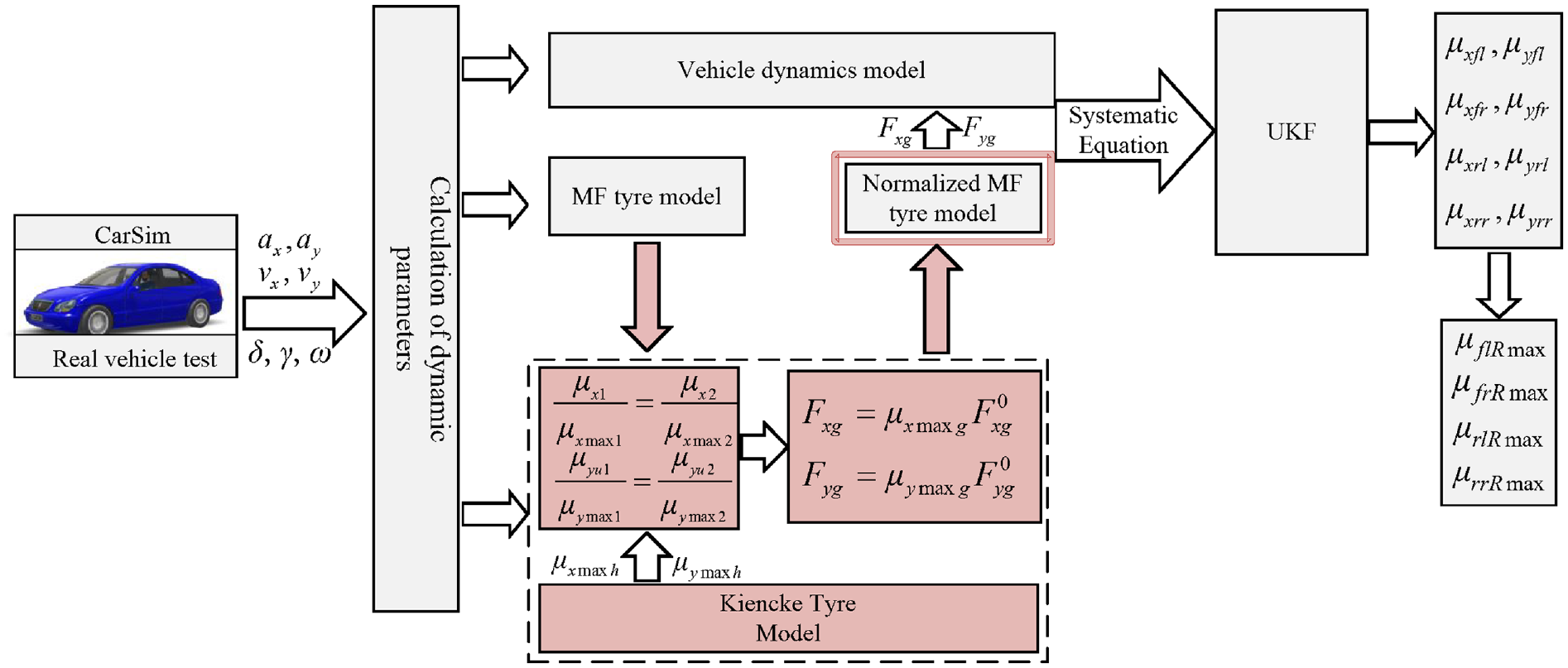
Framework of road adhesion coefficient estimation algorithm.
Model building
Establish vehicle dynamics model
In order to maintain the rigor of the paper, this paper makes the following assumptions,
(1) Assuming that road peak adhesion coefficient remains constant when the tire is subjected to different loads;
(2) Assuming that road peak adhesion coefficient remains constant on the contact surface between tire and road;
(3) The influence of pavement (macroscopic and microscopic texture), tire (rubber type, pattern, temperature, speed, pressure) on the road peak adhesion coefficient is ignored.
The three DOF vehicle model is established as shown in Figure 2.
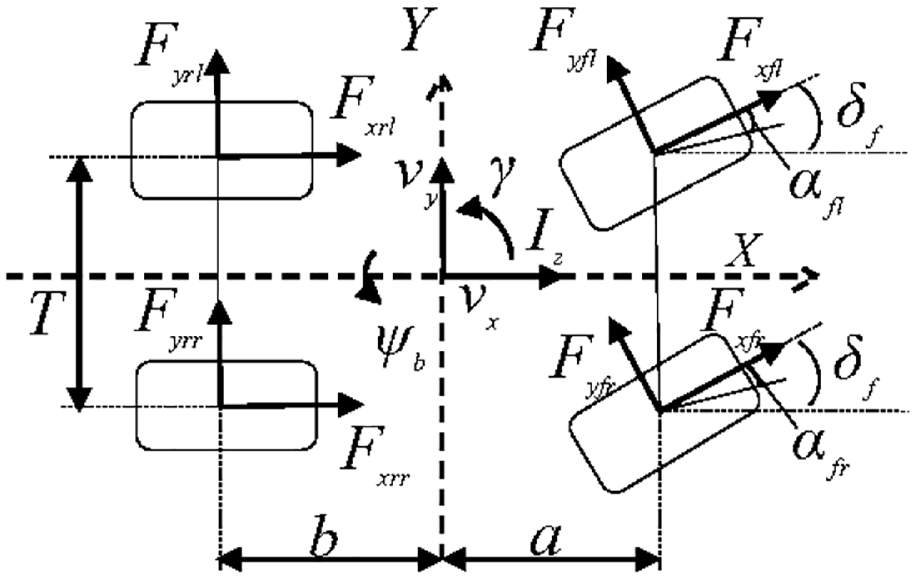
The three DOF vehicle model.
The following differential equations of motion are established:
Longitudinal equation:
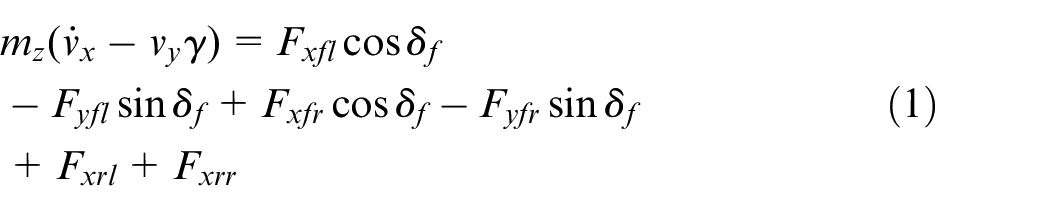
Lateral equation:

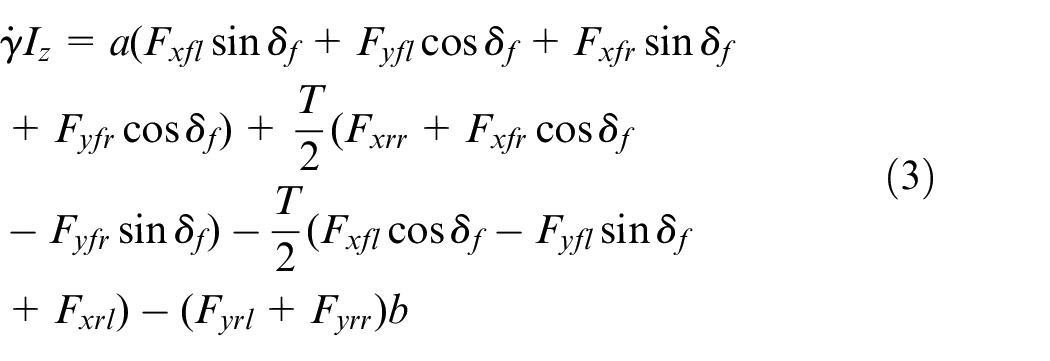
Yaw equation:
The load of each wheel can be expressed as




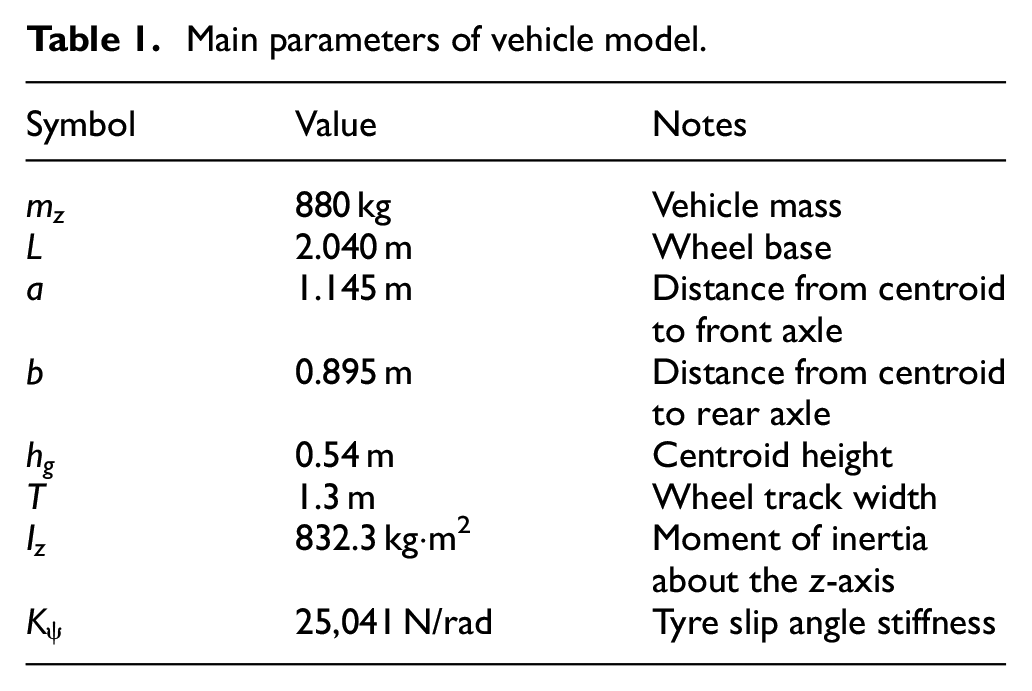
The main parameters of the vehicle are set as shown in Table 1.
Main parameters of vehicle model.
Tyre model
The tyre longitudinal force and lateral force on the known road are easily estimated by the tyre model. There are many tyre models available in the field of vehicle dynamics, each of which has the ability of accurately describing the tyre dynamic response in a certain field. Such as Dugoff et al., MF, LuGre, Uni-Tyre, and so on.28–33 Therefore, in the control process, we can select the tyre model with the highest accuracy according to the field of tyre dynamics studied. The estimated road adhesion coefficient can be obtained by matching with the corresponding filtering algorithms (UKF, Extended Kalman Filter (EKF), et al.). However, due to the variety of tyre model forms and parameters, some models with high fitting accuracy usually have more parameters and more complex forms, so it is difficult to establish system equations for filtering. Considering the difficulties in this regard, the preprocessment method mentioned in this paper can easily connect the output force of tyre model with the road adhesion coefficient, which is conducive to the estimation of road adhesion coefficient by filtering algorithm.
The MF tyre model has been widely used in vehicle dynamics simulation and analysis due to its high fitting accuracy and wide application range. 8 However, it is difficult to estimate the road adhesion coefficient through MF tyre model due to its complex form, various parameters and close correlation. In this paper, MF tyre model will be taken as an example to study the estimation of road peak adhesion coefficient, which will verify the preprocessment method.
MF tyre model
Steady-state pure driving (braking) conditions
The longitudinal force of MF tyre model under pure linear working condition can be expressed as:

Steady-state turning conditions
The lateral force under the condition of pure lateral deflection can be expressed as:

Combined steady-state driving (braking) and turning conditions
The longitudinal force and the lateral force can be expressed as





The longitudinal slip ratio of the MF model is:

Tyre slip angle can be represented as:

Where
Preprocessment method for road peak adhesion coefficient fusion estimation
Construction of standard
s curve
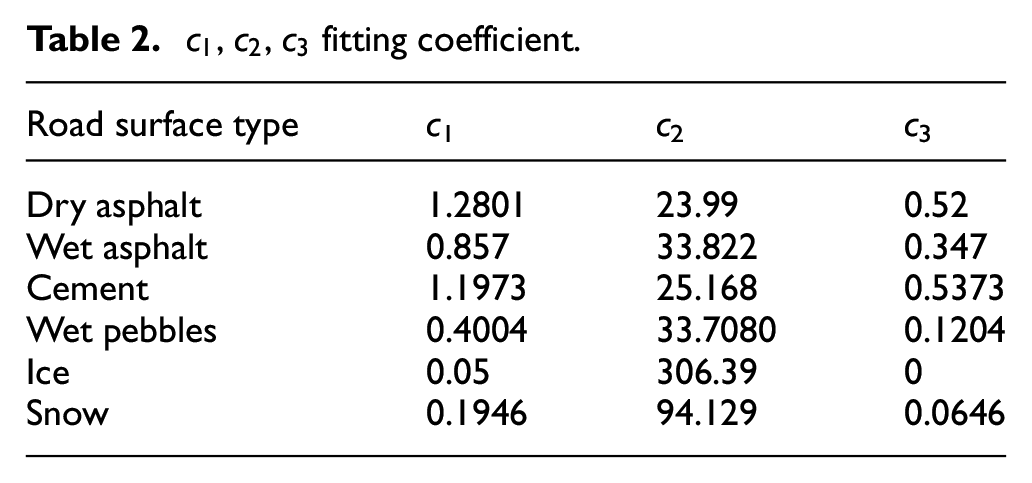
Kiencke model is used to describe the relationship between comprehensive road utilization adhesion coefficient and comprehensive slip ratio. Kiencke tyre model optimized the Burckhardt 24 model. As shown in equation (17)
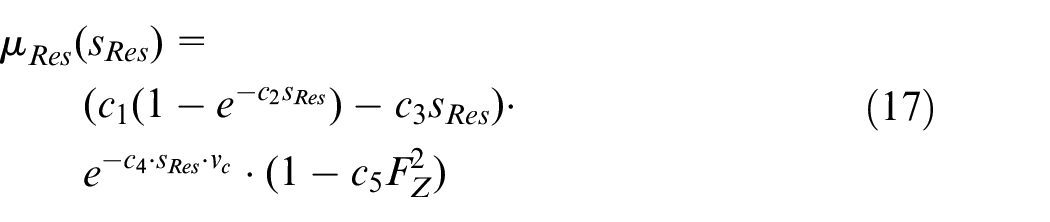
Where
Longitudinal slip ratio

Lateral slip ratio

The relationship between longitudinal and lateral slip ratio can be expressed as:

Where
Longitudinal and lateral road utilization adhesion coefficients can be expressed as equations (21) and (22)


Comparative analysis
From the Kiencke tyre model, we can get Figure 3.
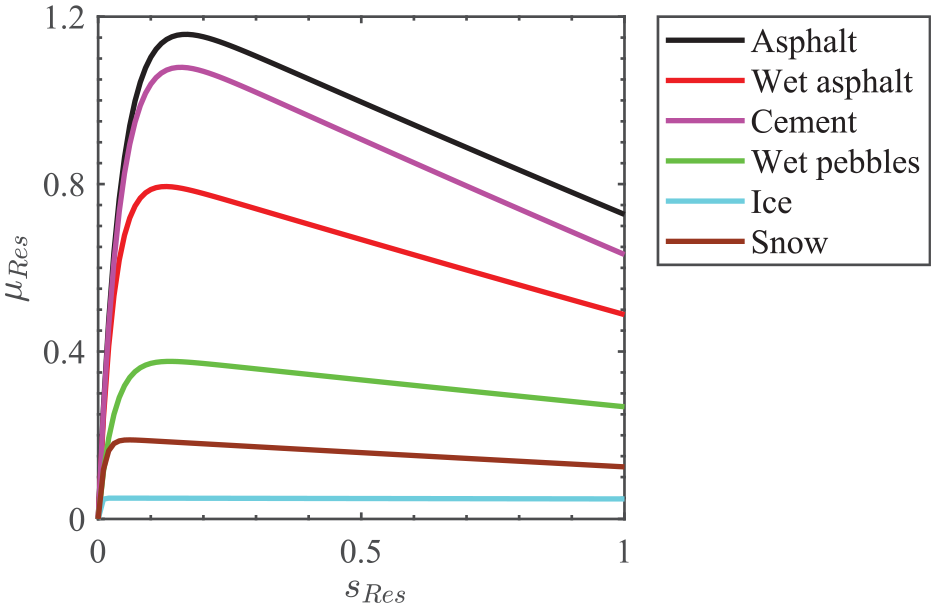
Typical road adhesion coefficient curve.
It can be seen from Figure 3 that under six typical roads, the change trend of the relationship curve between the comprehensive road adhesion coefficient and the comprehensive slip rate is extremely similar, especially between adjacent roads, such as asphalt and cement, wet pebbles and snow road. Therefore, the relationship between the utilization adhesion coefficient of road surface and the peak adhesion coefficient can be obtained as 34 :

Assume that roads 1 and 2 are adjacent roads, and
Similarity analysis in longitudinal and lateral road utilization adhesion coefficient
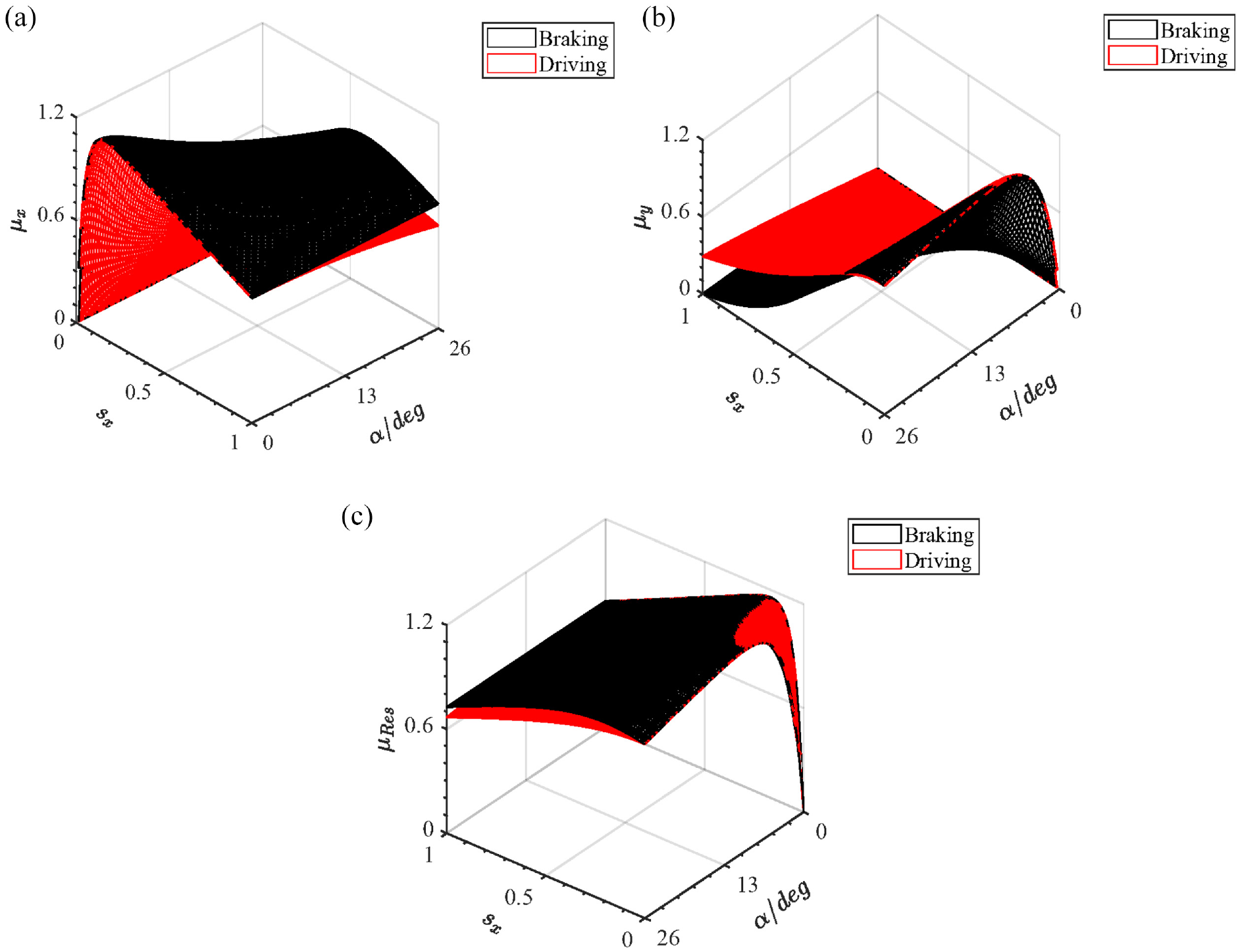
Figure 3 shows the relationship between the comprehensive slip ratio and the comprehensive road adhesion coefficient, but it cannot further describe the dynamic performance in the longitudinal and lateral directions. In longitudinal and lateral combined conditions, it cannot achieve accurate enough information. In order to elaborate the change law of the lateral and longitudinal road utilization adhesion coefficient under complex conditions, according to the Kiencke tyre model, the change characteristics of the lateral and longitudinal road utilization adhesion coefficients under six typical roads are obtained. In view of the limited space, only the variation characteristics of adhesion coefficient of asphalt and cement roads are given in Figures 4 to 7.
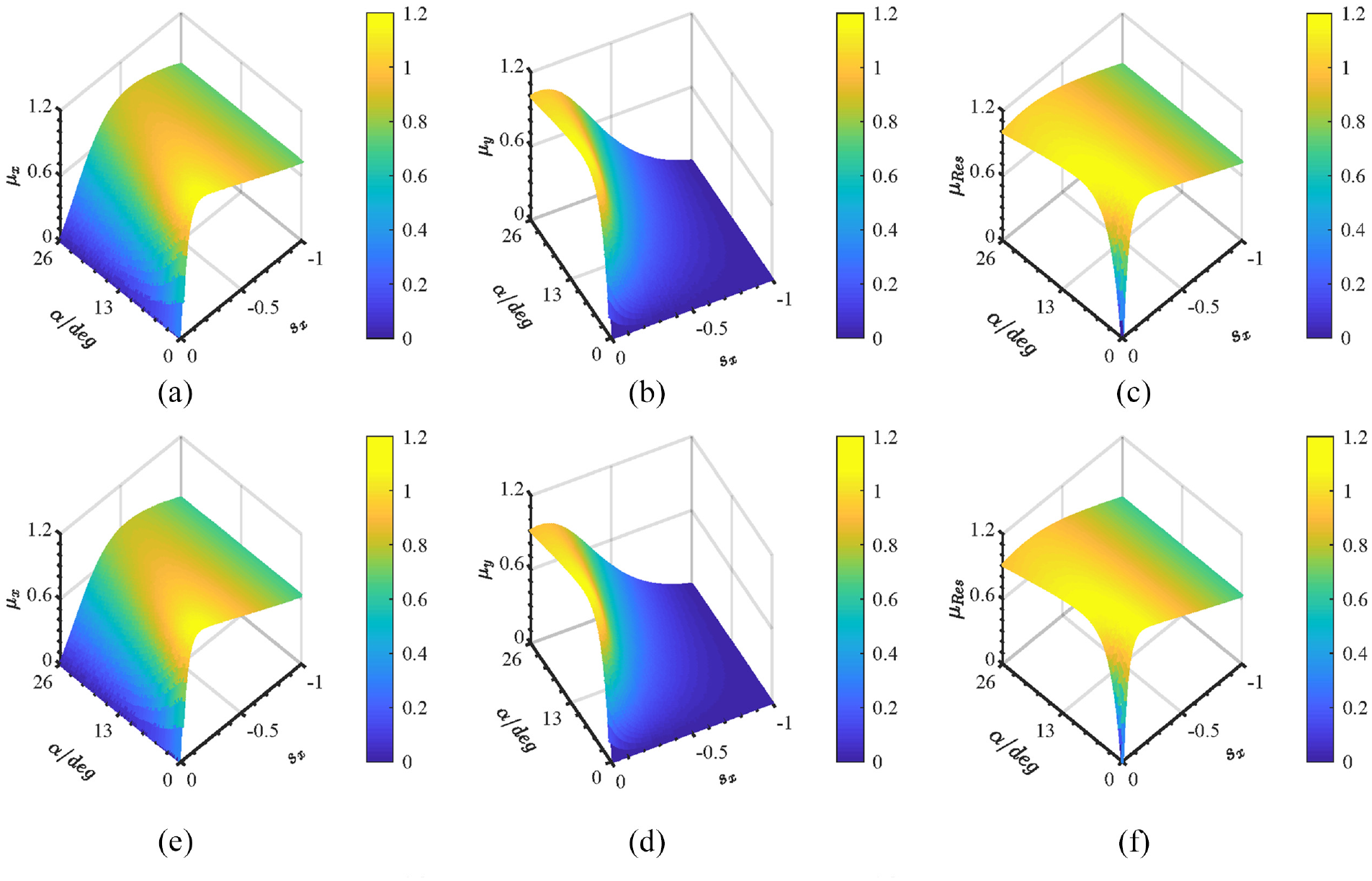
Variation characteristics of road utilization adhesion coefficient under braking condition: (a–c) asphalt and (d–f) cement.
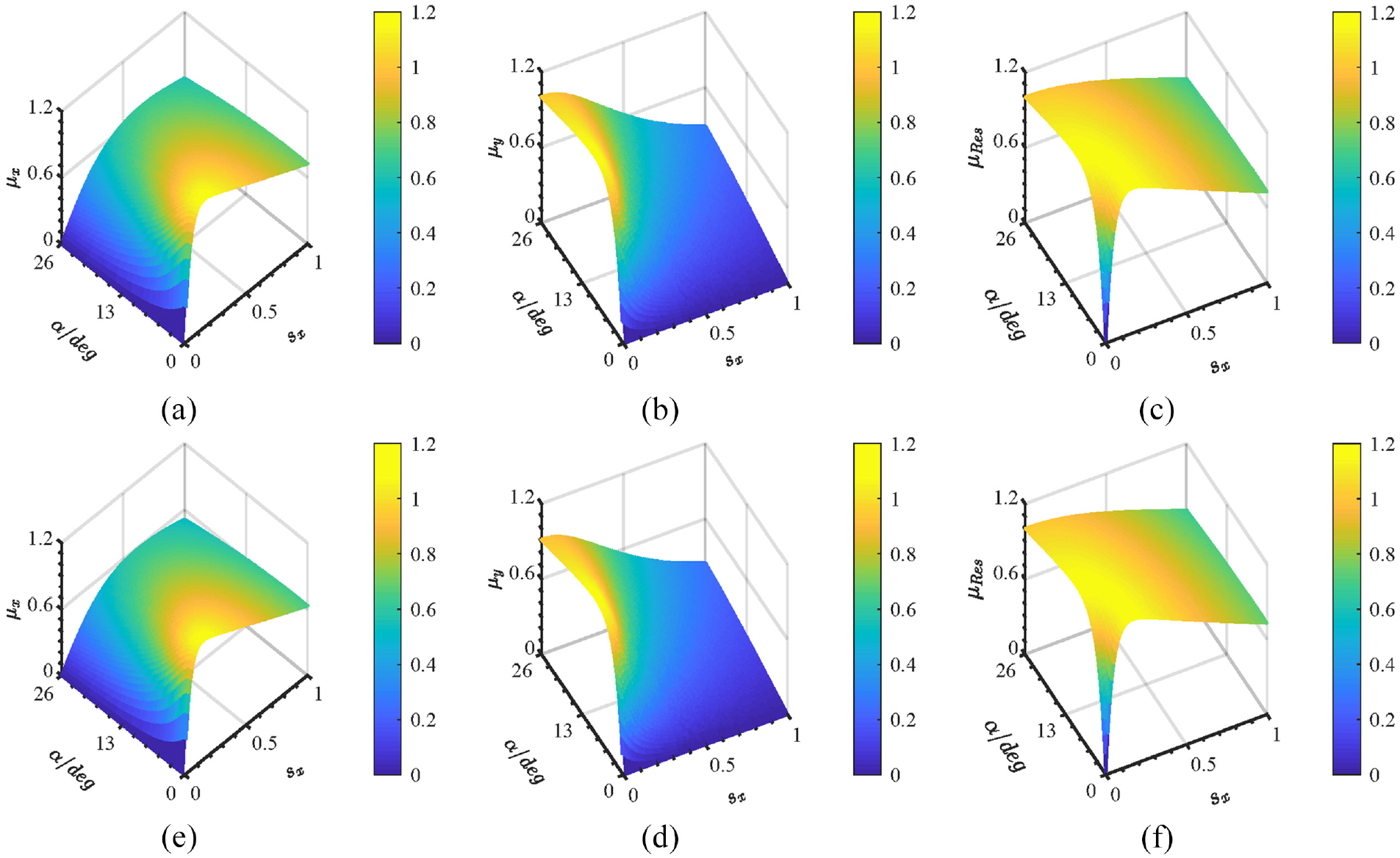
Variation characteristics of road utilization adhesion coefficient under driving condition: (a–c) asphalt and (d–f) cement.
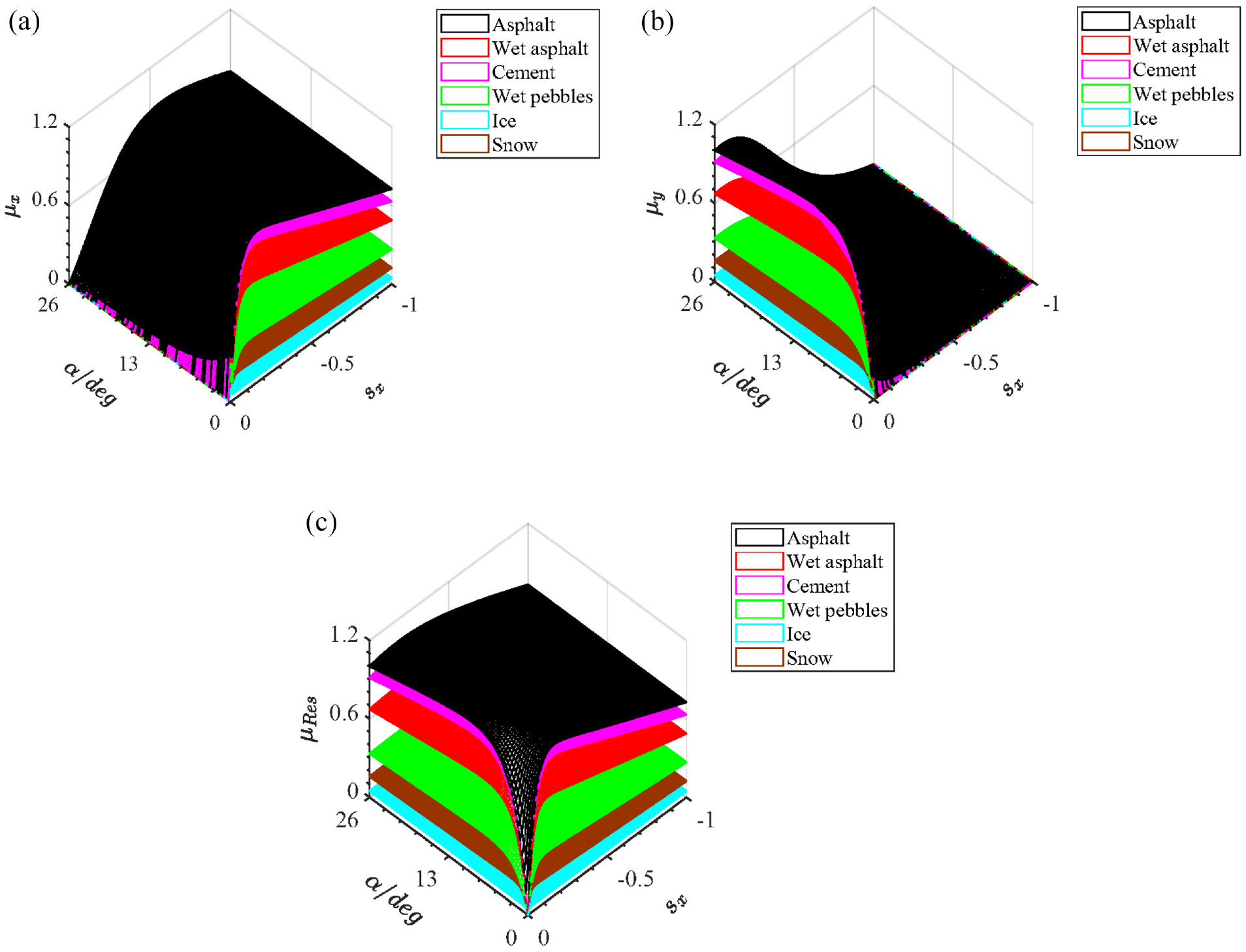
Variation of adhesion coefficient of six typical roads under braking condition: (a) longitudinal road utilization adhesion coefficient, (b) lateral road utilization adhesion coefficient, and (c) comprehensive road utilization adhesion coefficient.
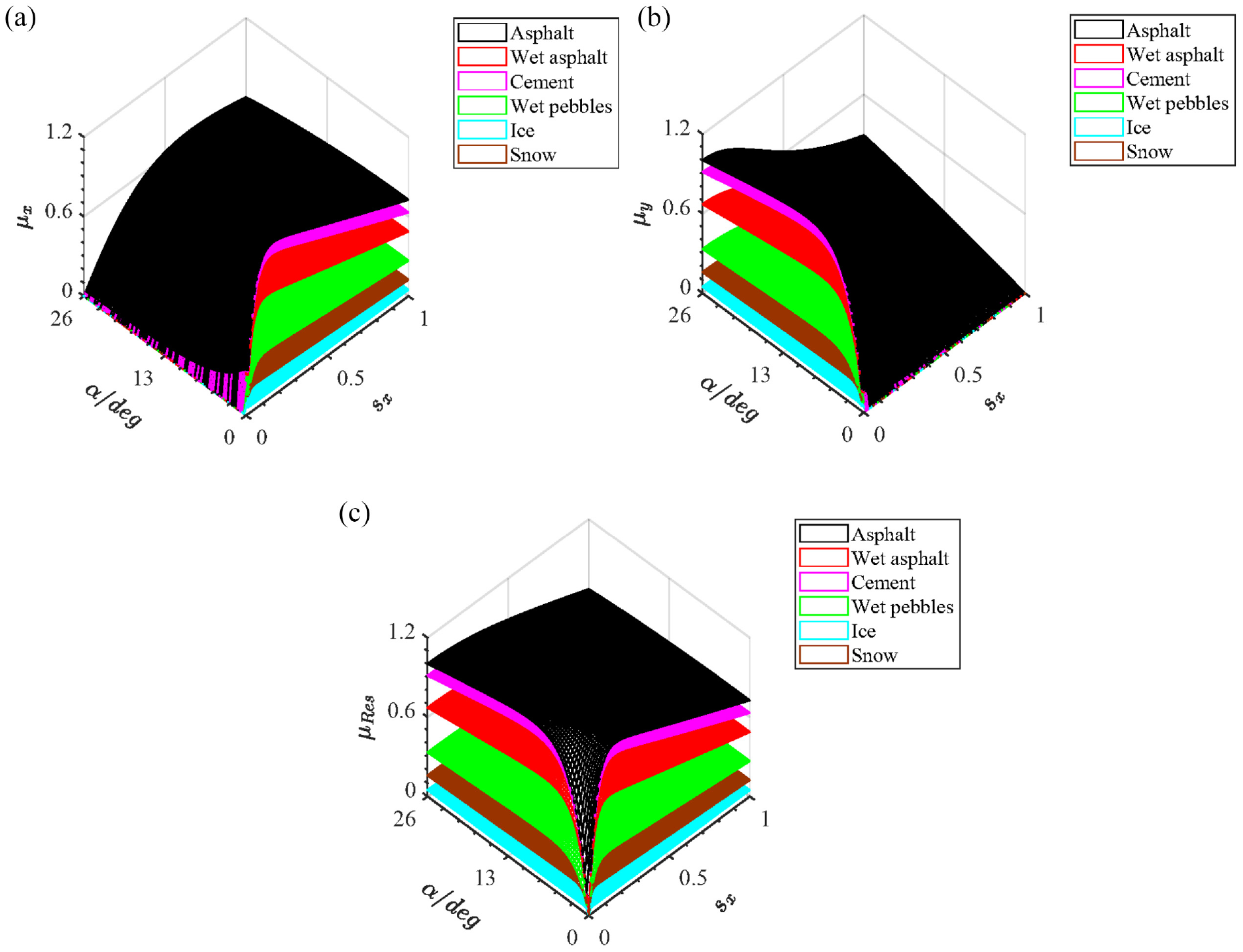
Variation characteristics of utilization adhesion coefficient of six typical roads under driving condition: (a) longitudinal road utilization adhesion coefficient, (b) lateral road utilization adhesion coefficient, and (c) comprehensive road utilization adhesion coefficient.
From Figures 4 to 7, Whether in braking conditions or driving conditions, the change trend of


Where
For the convenience of subsequent elaboration, it is assumed that the adjacent roads with the highest similarity to the target road can always be found in these six typical roads. The target road and the adjacent road with the highest similarity to the target road are set as road g and road h respectively. The relationship between longitudinal force and longitudinal utilization adhesion coefficient of road surface can be expressed as equation (26). The relationship between lateral force and lateral utilization adhesion coefficient of road surface can be expressed as equation (27). 25


Where
It can be seen from formula (24)–(27) that the curve characteristics of the known adjacent roads can be used as a reference for estimating the peak adhesion coefficient of the target road. Thus equations (28) and (29) is obtained.


Where
Then equations (28) and (29) can be written as the following normalized form.


Where
Road utilization adhesion coefficient under driving and braking conditions
From formula (18) and (19), the curves of adhesion coefficient versus longitudinal slip ratio and tyre slip angle should be different between driving and braking conditions, as shown in Figure 8.
Comparison of road utilization adhesion coefficient under driving and braking conditions: (a) longitudinal road utilization adhesion coefficient, (b) lateral road utilization adhesion coefficient, and (c) comprehensive road utilization adhesion coefficient.
It can be seen from Figure 8 that with the increase of tyre slip angle, the difference between the two conditions is gradually obvious.
But it can also be seen that when the tyre slip angle is within 15°, the gap between the two surfaces is very small, almost coincident. Therefore, it is assumed that when the tyre slip angle is within 15°, the slip rate is in
Selection of adjacent road
According to existing research and experimental data, 4 the value in Figures 3 to 8 is larger than the actual value of road calibration. However, it does not affect the ratio relationship between road utilization adhesion coefficient and peak adhesion coefficient.
The road peak adhesion coefficient
Fusion strategy
The fusion strategy can be expressed as:





Where
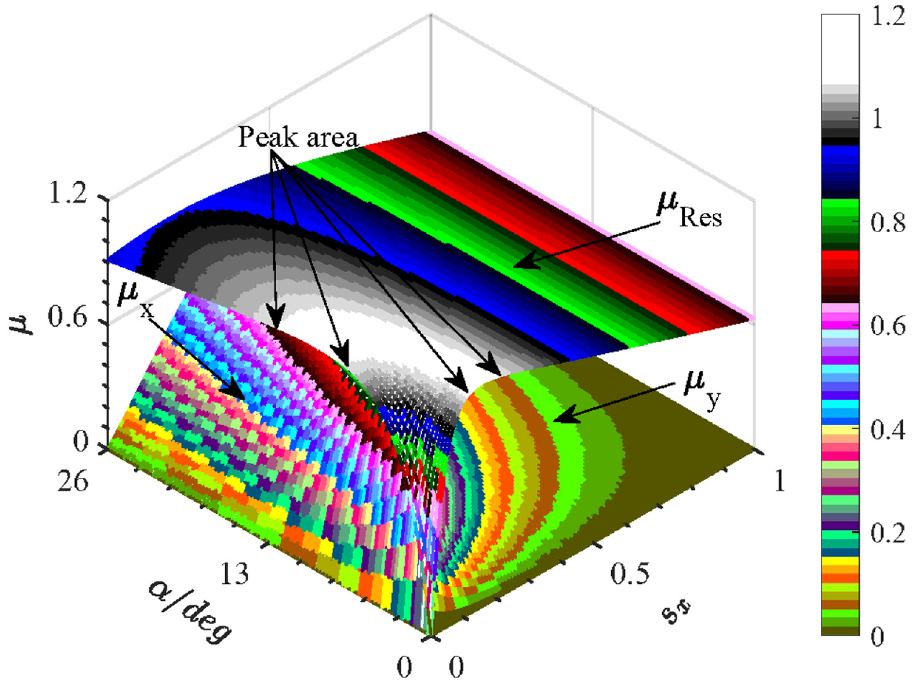
Variation of longitudinal, lateral, and comprehensive utilization road adhesion coefficient of cement road.
As shown in Figure 9, the pure white area is the peak area of comprehensive road utilization adhesion coefficient. In addition, based on the actual running process of the vehicle, it is infeasible to change the tyre slip angle of the vehicle in order to reach the peak area, but it is feasible and realistic to change the longitudinal slip rate of the vehicle by ABS to reach the peak area. Therefore, taking the tyre slip angle
Estimation method of road peak adhesion coefficient based on preprocessment algorithm
Normalization of tyre model
MF tyre model can be expressed as:

According to formulas (24)–(31), the normalized form of MF can be obtained as follows:


Establishment of system equation
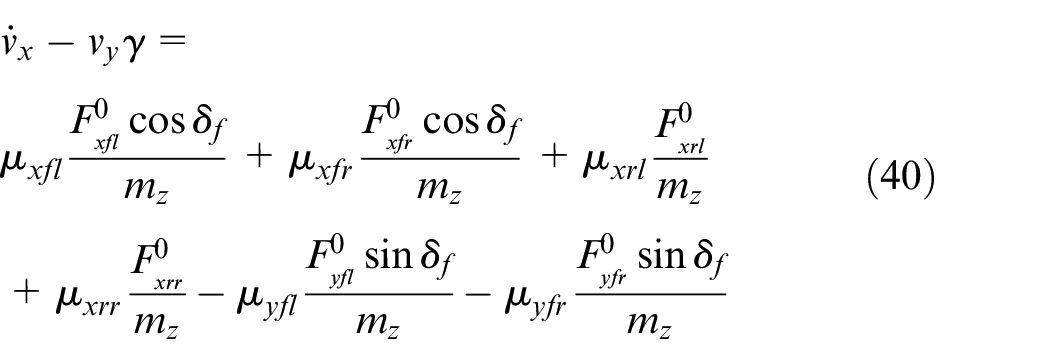
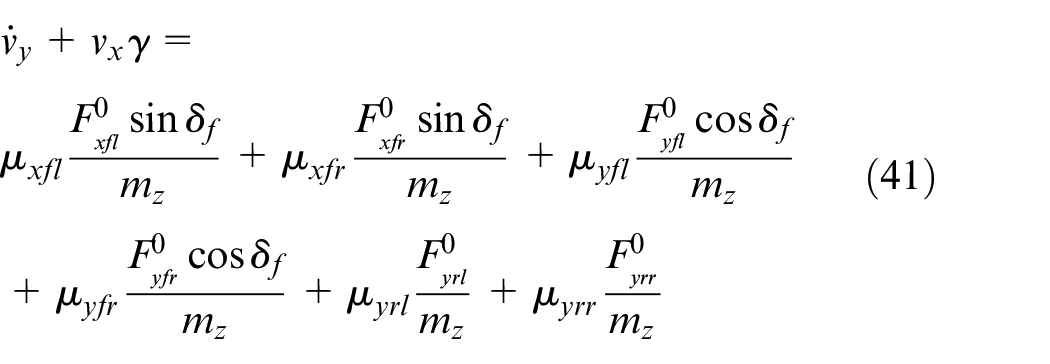
In order to accomplish the estimation of the longitudinal and lateral peak adhesion coefficient of the road surface, the formulas (1), (2), and (3) are deformed to obtain
The state equation can be written as:
The measurement equation can be written as:




Among them,
UKF
The estimation flow of UKF can be expressed as the Figure 10. The initial value in the filtering process, measurement noise covariance
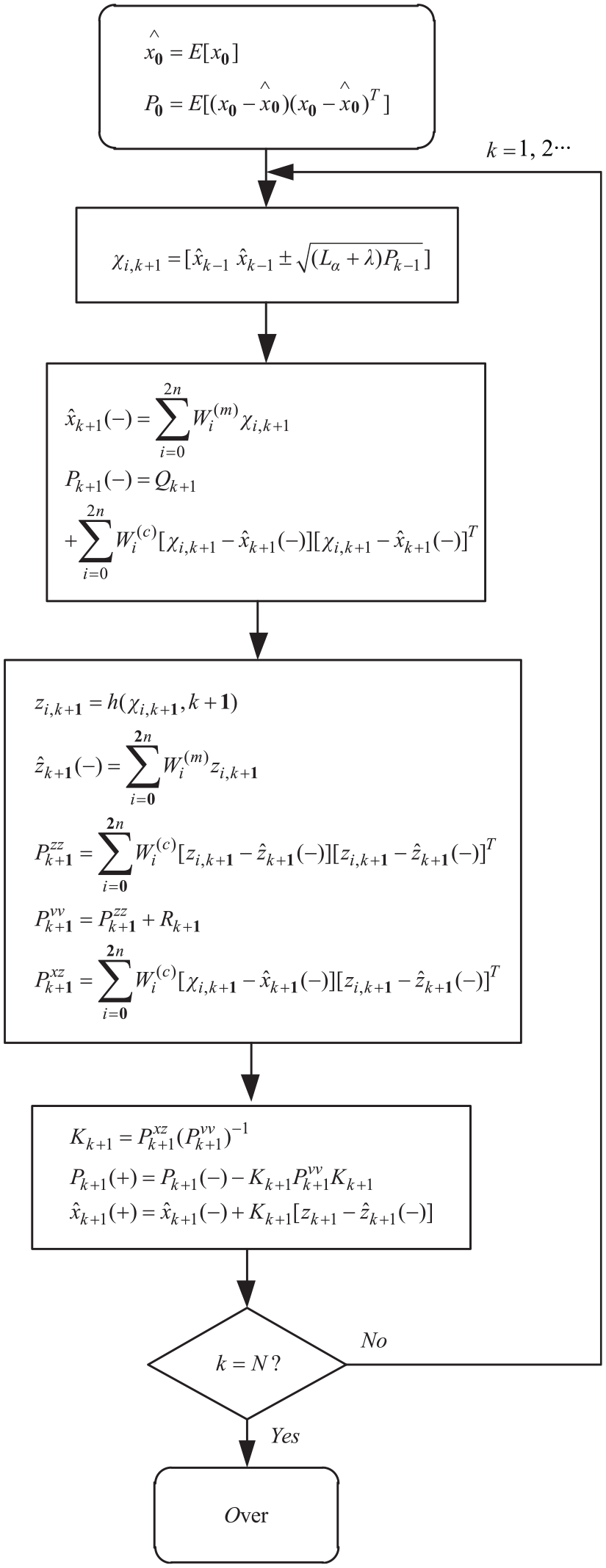
UKF estimation process.
Simulation analysis and verification
The algorithm is verified under two working conditions by the cosimulation of CarSim and Matlab/Simulink.
Linear braking condition
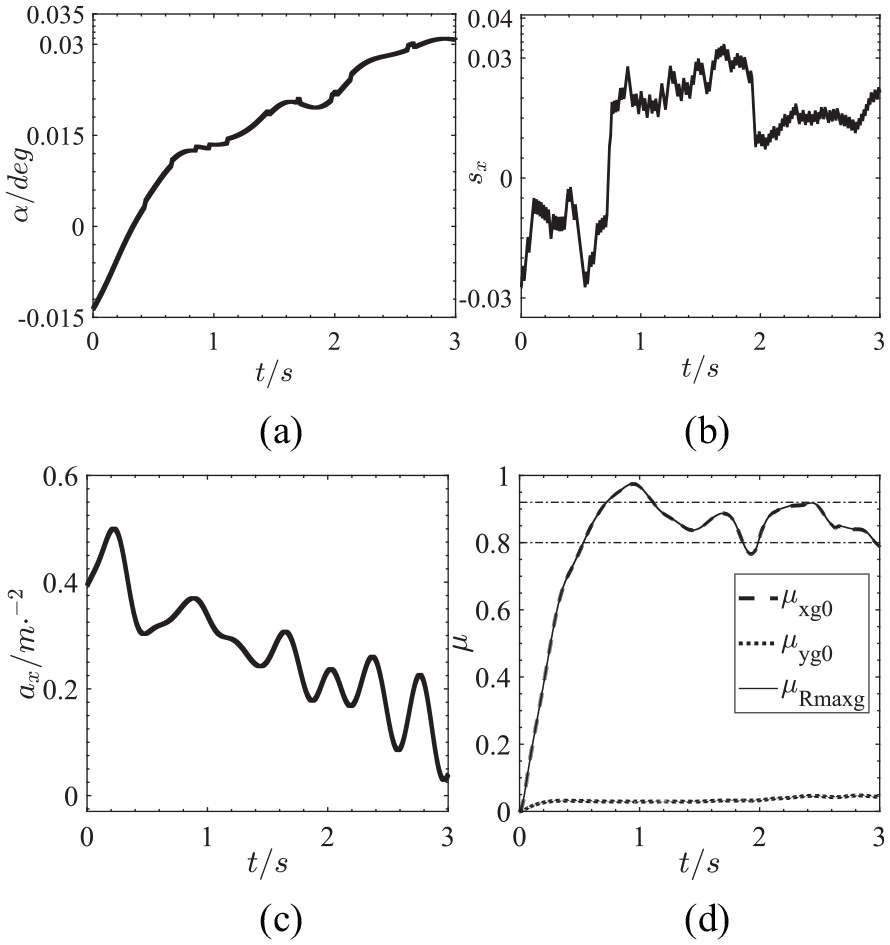
The road peak adhesion coefficient is 0.85, the initial speed is 100 km/h, and the straight-line braking condition 35 is set. Taking the left front wheel as an example, the simulation results are shown in Figure 11:
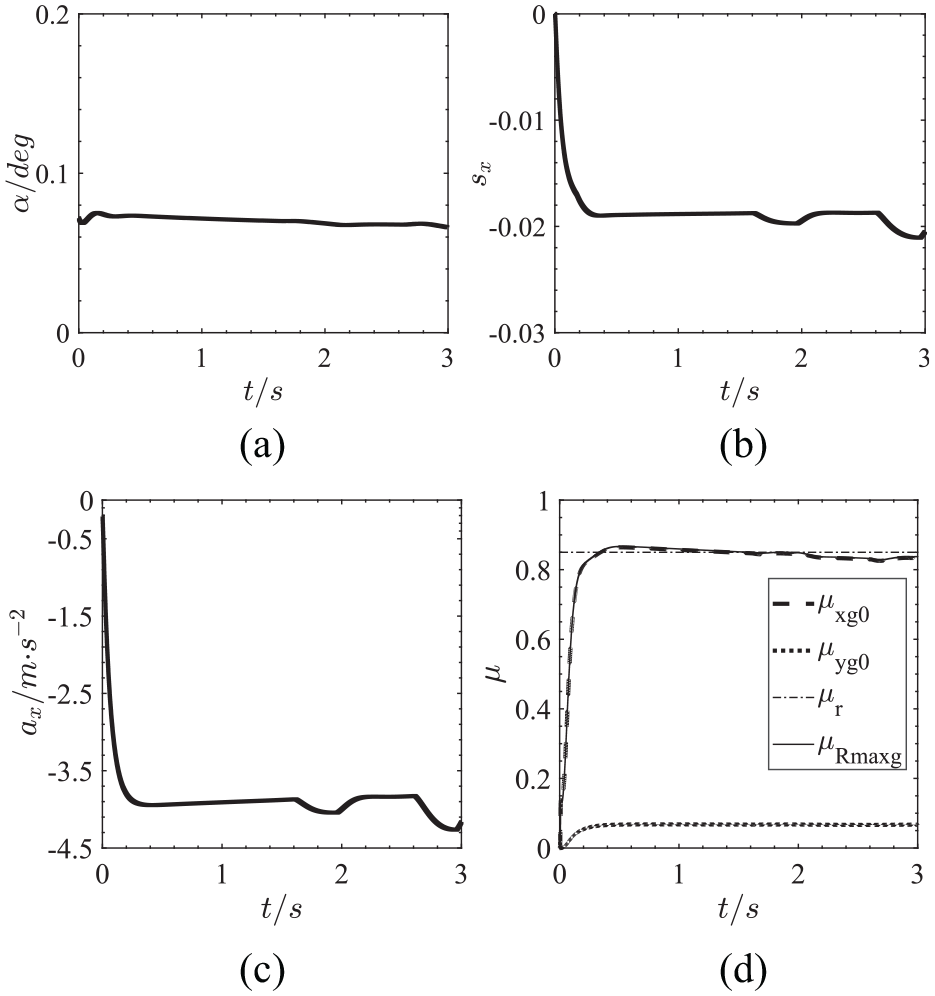
Simulation results under linear braking condition: (a) tyre slip angle, (b) longitudinal slip ratio, (c) longitudinal acceleration, and (d) estimated value of road adhesion coefficient.
It can be seen from Figure 11 that the road excitation under this condition is weak, and the tyre slip angle and longitudinal slip rate cannot make the comprehensive road utilization adhesion coefficient reach the peak area. However, from the estimation effect,
Combined turning and braking condition
The road is set as a circular road with a radius of 30 m, the road peak adhesion coefficient is 0.9, the initial speed is 60 km/h, and combined turning braking condition 36 is set. Taking the left front wheel as an example, the simulation results are shown in Figure 12:
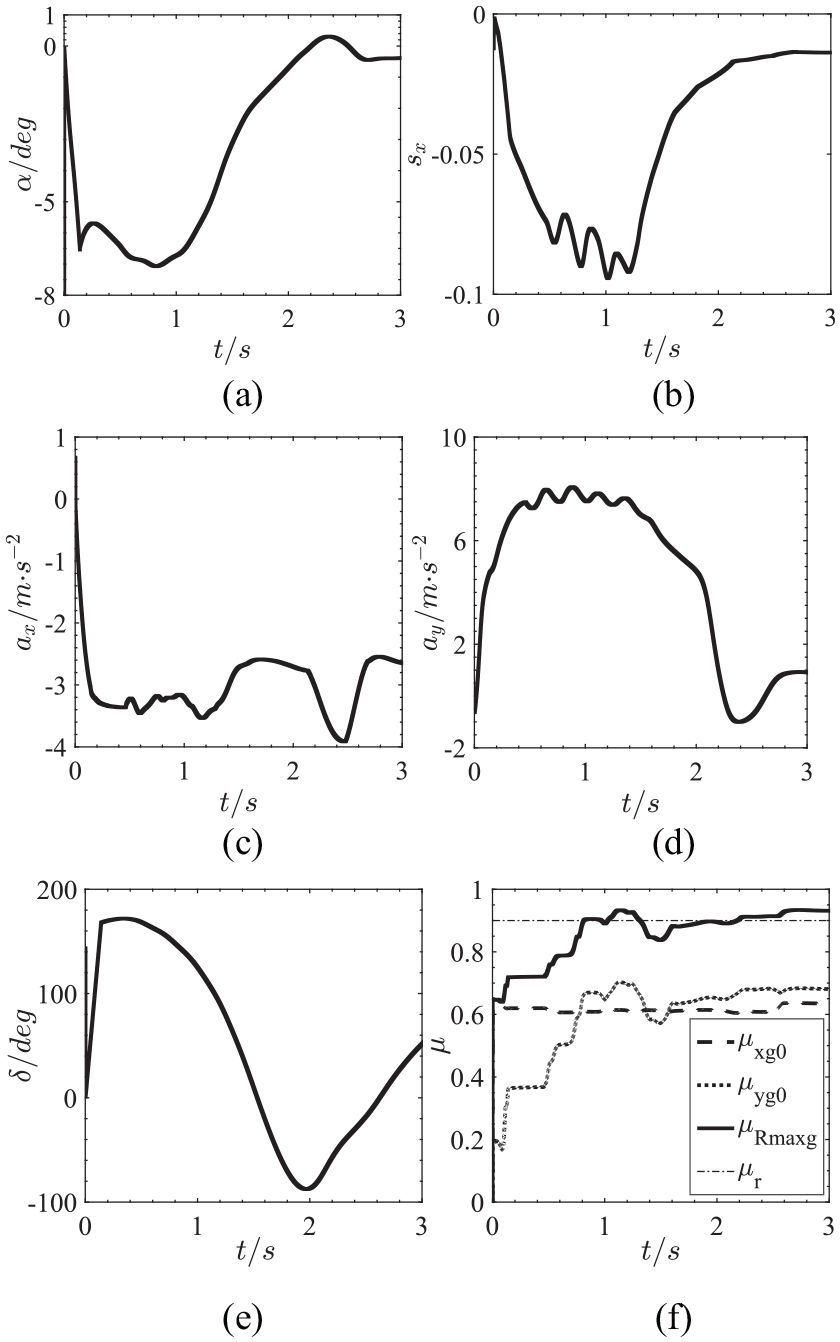
Simulation results under the combined turning and braking condition: (a) tyre slip angle, (b) longitudinal slip ratio, (c) longitudinal acceleration, (d) lateral acceleration, (e) steering angle, and (f) estimated value of road adhesion coefficient.
From Figure 12(a) and (b), this condition is severe, road excitation is large and complex, but still not enough to reach the peak area. It can be seen from Figure 12(f) that
Experimental verification
Calibration test of road sliding adhesion coefficient
BM-III pendulum friction coefficient tester 37 was used to test the sliding adhesion coefficient 4 of the experimental road. As shown in Figure 13, the 100 m straight asphalt road was selected for calibration test. The calibration result is shown in Figure 14.
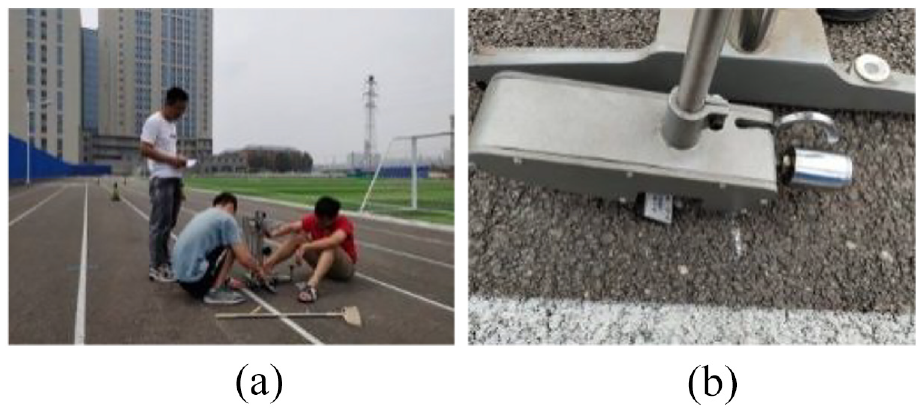
Calibration test of road sliding adhesion coefficient: (a) overall and (b) local.
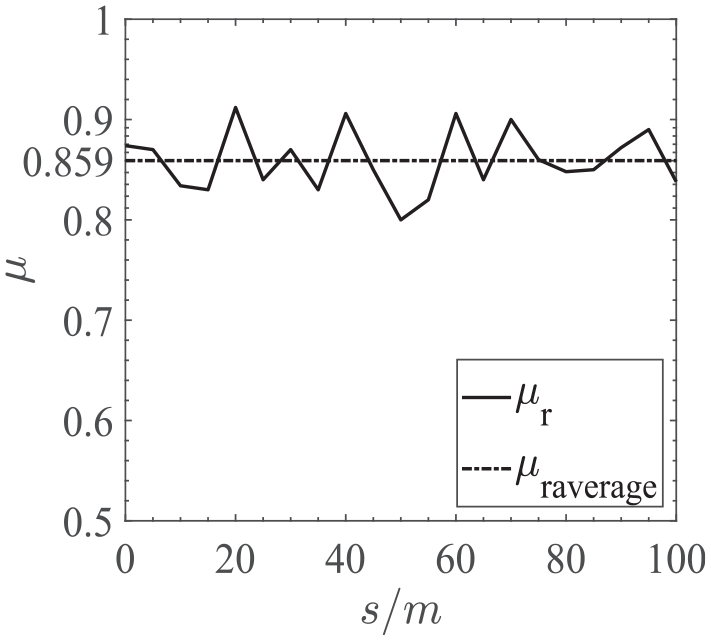
Road sliding adhesion coefficient calibration results.
It can be seen from Figure 14 that the variation range of sliding adhesion coefficient for experimental road is
Real vehicle test
As shown in Figure 15, the test platform is a wire-controlled modified UTV (Utility Vehicle), and the driving mode is four-wheel independent drive. The vehicle is equipped with a variety of sensors, including GPS, inertial navigation, steering wheel angle sensors, and wheel speed sensor, which can check the test results. The vehicle controller is used to sample data and estimate it offline.

Real vehicle test platform.
Straight line test
The test road is dry asphalt road as shown in Figure 13(b). The working condition is set as linear driving. 35 The test speed is about 35 km/h, taking the left front wheel as an example, and the test results are shown in Figure 16.
Test results for linear test: (a) tyre slip angle, (b) longitudinal slip ratio, (c) longitudinal acceleration, and (d) estimated value of road adhesion coefficient.
It can be seen from Figure 16 that the road excitation is weak in the linear drive vehicle test.
Curved test
The test road surface is a dry asphalt ring road surface, and the test section is a semi-ring steady-state turning condition with a radius of 33 m 36 with a test speed of about 40 km/h, and the test results are shown in Figure 17:
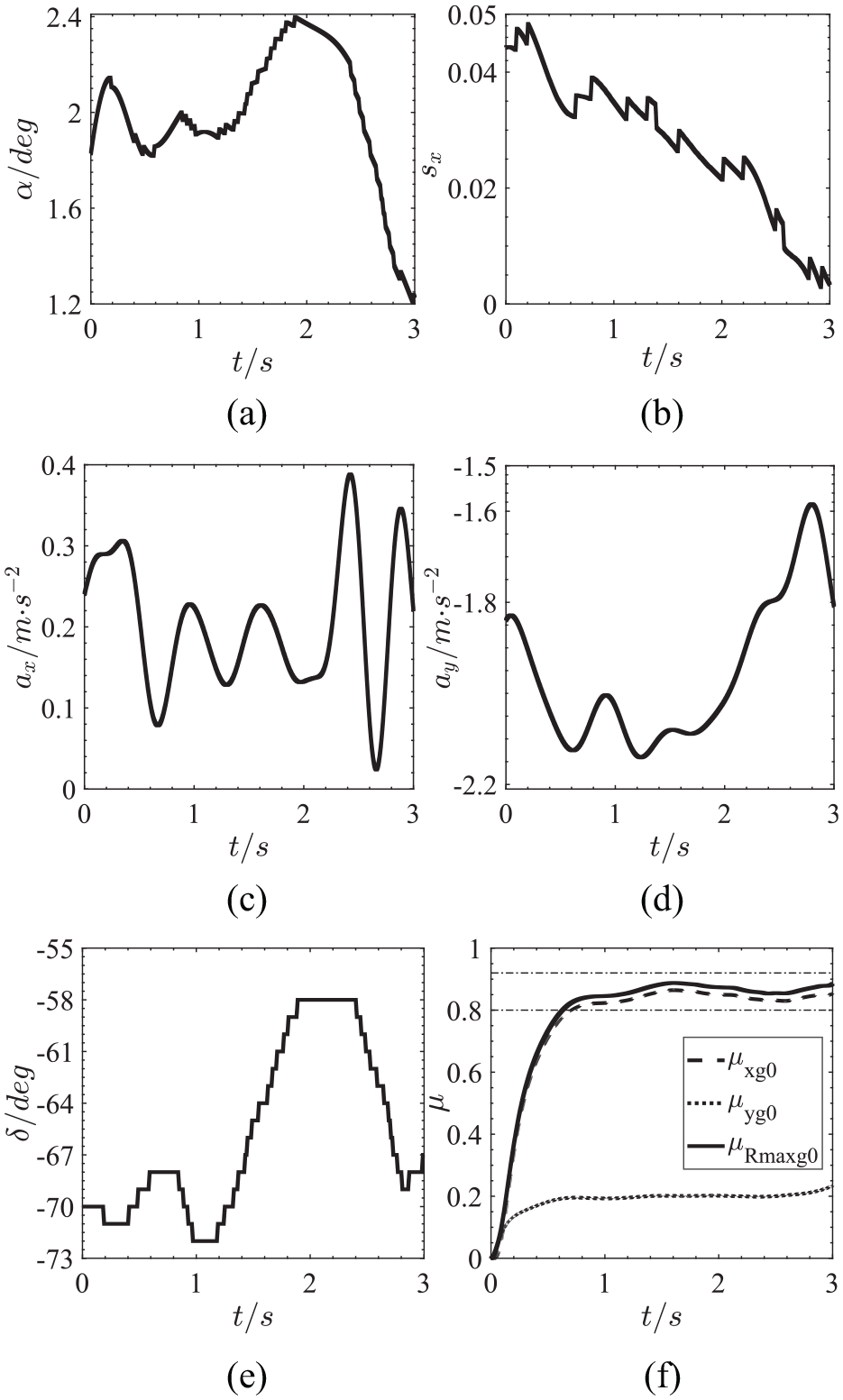
Test results for curved test: (a) tyre slip angle, (b) longitudinal slip ratio, (c) longitudinal acceleration, (d) lateral acceleration, (e) steering angle, and (f) estimated value of road adhesion coefficient.
It can be seen from Figure 17(a) that under the driving condition of the curved test, the maximum tyre slip angle is 2.4°, and the maximum longitudinal slip rate can reach 0.049. It can be seen from Figure 17(f) that
Conclusion
The conclusions drawn are as follows.
(1) From the analysis of the equal ratio relationship, a normalized framework with great inclusiveness to the tyre model is derived, which makes almost all tyre models can be applied into the estimation method based on tyre models.
(2) The real vehicle and simulation experiments show that when the vehicle is driving on the dry asphalt road, the longitudinal slip rate and tyre slip angle cannot reach the value which can map the comprehensive road peak adhesion coefficient under the general braking or acceleration conditions. This leads to that the estimation algorithm based on vehicle dynamic response is difficult to accurately estimate the maximum adhesion capacity of asphalt road.
(3) With the proposed preprocessment method, the estimation algorithm can accurately and timely estimate the comprehensive road peak adhesion coefficient under insufficient road excitation, which verifies high sensitivity to road excitation and the universality to complex tyre models of the preprocessment algorithm.
(4) The optimal values of longitudinal and lateral road utilization adhesion coefficients under actual working conditions are also given, which provides corresponding reference signals for vehicle active safety systems.
In summary, based on the assumptions proposed above, this algorithm has many advantages, such as simple idea, high precision, certain robustness, and wide application range to working conditions of vehicle, which will promote development of vehicle active safety systems.
Finally, although accurate estimation results have been obtained in this paper, the performance of the estimation algorithm can still be further improved by improving the fusion method of the lateral and longitudinal road adhesion coefficients, which is also the focus of the next research.
Footnotes
Appendix A
The coefficients in the MF tyre model are expressed as follows:
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (Grant Nos. 12072204, 11572207, 11872255), Natural Science Foundation of Hebei Province (Grant No. A2020210039).