
Abstract
Dynamic stability is critical to achieve the safety of the cars, particularly during emergency maneuvers. Coordinated control algorithms are suggestive of the enhanced safety and stability of a vehicle. Hence, a novel adaptive robust multi-input control framework is developed using the combination of direct yaw moment (DYC) and active front steering (AFS). The dynamics of the steering system mechanism is included for the reliability of the proposed control scheme. The proposed controller is developed according to the approximation capacity of the radial basis function (RBF) neural network system. The adaptation laws are derived based on the Lyapunov stability theory. Additionally, the proposed integrated control paradigm contains a state observer and the sliding surface of the tracking errors converges to the asymptotic stability condition through the design of a smooth exponential reaching law. The effectiveness of the proposed control scheme is compared to a high-performance optimal robust control technique and open-loop system. In order to assess the robustness of the proposed algorithm, structured and unstructured uncertainties were also incorporated in terms of the parametric uncertainties such as the tire cornering stiffness and cross-wind gust disturbance. The results obtained for different maneuvers reveal that the proposed controller is successful to improve the handling performance and to ensure the stability of the vehicle when compared to the previously reported methods.
Introduction
Vehicle motion control schemes have been massively evolved within the last couple of decades to respond to the demands on fuel efficiency, ride comfort, safety, and vehicle stability.1,2 Invariants of control paradigms have been practiced concerning improved vehicle stability.3,4 For instance, active front steering (AFS),5,6 anti-lock braking systems (ABS), 7 and direct yaw-moment control (DYC)8,9 are commonly regarded as effective methods to generate the required yaw stability and thus cornering performance. DYC is generally accomplished by producing an external yaw moment and using the differential braking system. For this purpose, an external yaw moment is applied to the chassis to improve vehicle active safety during aggressive driving maneuvers. 10 The optimal solution for the yaw moment and also the associated mechanism to generate the desired moment is still regarded as a challenge related to the implementation of the DYC approach. 11 Furthermore, the yaw moment is a bounded function of the road forces. Hence, the longitudinal tire forces can be typically insufficient to provide the necessary yaw moment particularly in case the vehicle inertia moment is also considerable. 12
The control paradigms are designed and employed vastly in order to accomplish a certain performance as well as to meet vehicle security requirements.13–15 Consequently, it is conceivable that distinct algorithms are bound to certain operating conditions. Therefore, the integrated control approaches such as AFS/DYC is a potentially effective means of enhanced vehicle lateral dynamics with no or a marginal interference between the different control parts of the coordinated system.16–19 The integrated AFS/DYC has demonstrated conspicuous effectiveness to provide satisfactory performance for the vehicle in transient mode during critical maneuvers.
20
The vehicle handling control with uncertainties related to the vehicle parameters and states and subjected to external disturbances was explored employing a robust
The explored literature is suggestive that the integrated control frameworks related to the active chassis control systems uphold meritorious performance compared to their individual counterparts. However, further emerging control algorithms and novel control methods have yet to be involved to reach a well-established strategy. 16 The integrated control method has shown a higher performance in lane-change maneuvers and collision avoidance wherein the steering input demand has reduced by 20% when compared to the singularly front-axle steerable approach. 23 Consequently, it is comprehensible to further explore the capacity and the limits of the integrated control paradigm in light of the improved steerability and maneuverability as well as safety and stability during critical harsh maneuvers for automated cars and advanced driver-assistance systems. Apart from the control mechanism, the control algorithms which are explored above are suggestive of certain advantages but adaptive intelligent control techniques (e.g. Taghavifar 2 , Taghavifar and Rakheja 5 , and Mohammadzadeh and Taghavifar 6 ) have demonstrated further effectiveness in terms of coping with systematic nonlinearities, providing rapid stabilization and significant robustness within a broad range of structured and unstructured uncertainties.
In light of the explored arguments, this paper proposes a novel control agenda to stabilize the vehicle lateral dynamics and provide motion stability and improved handling of vehicle by employing a coordinated DYC + AFS. It is aimed to follow the desired yaw rate and the sideslip angle of the vehicle obtained from a reference vehicle model. The developed algorithm is achieved by realizing the required yaw moment and front active steering input by employing a robust adaptive exponential-based integral sliding mode based RBF-NN (EISMC-RBF-NN) controller a sliding-mode controller wherein the system is subjected to parametric uncertainties and external disturbances and considering the region of nonlinearity and saturation of the tires with respect to the tire slip angle. The robustness of the proposed EISMC-RBF-NN control law is shown employing the Lyapunov stability theory. The effectiveness of the proposed controller is verified against a high-performance optimal robust control and without control systems in the literature, 13 by using co-simulation in CarSim and MATLAB/Simulink under various operating conditions. The main contributions of this study are described as:
Unlike other papers, the nonlinear model dynamics for the observer and controller design is considered fully unknown.
A novel exponential-like sliding surface with multi-rate convergence rate is proposed for removing the chattering drawback.
The effectiveness of the proposed framework is tested during various emergency maneuvers and subject to strong gust of cross-wind validated using high-fidelity Matlab Simulink-Carsim co-simulations.
The remainder of the paper is organized as follows. In Section 2, the vehicle model is developed by incorporating a nonlinear tire model. The proposed control method is described in Section 3. In Section 4, the results are presented and discussed minutely. Finally, Section 5 summarizes the key findings of the paper and draws pertinent conclusions.
Problem statement
System modeling
Invariably speaking, pneumatic tires undertake the major task of generating directional forces to propel and to rotate the vehicle. Despite this, the lateral component of the tire force plays a substantial role in the handling stability and performance of the vehicle and the longitudinal forces influence the lateral dynamics infinitesimally. Although the kinematics and dynamics of the vehicle in the longitudinal orientation are dismissed, the vehicle speed must be sufficient to generate the lateral forces proportionally with the magnitude of slip angles according to the commonly employed tire models. Furthermore, no compliance is attributed in this study to the vehicle chassis as well as those of suspension systems while road is reasonably smooth and a geometric symmetricity exists between the left- and right-sides of the vehicle. Finally, it is assumed that the sway bar stiffness is large enough to resist weight transfer during the cornering maneuver. Under the above-described assumptions, a two-degree-of-freedom (2-DOF) bicycle model is developed to describe the substantial handling dynamics modes of the vehicle (Figure 1).
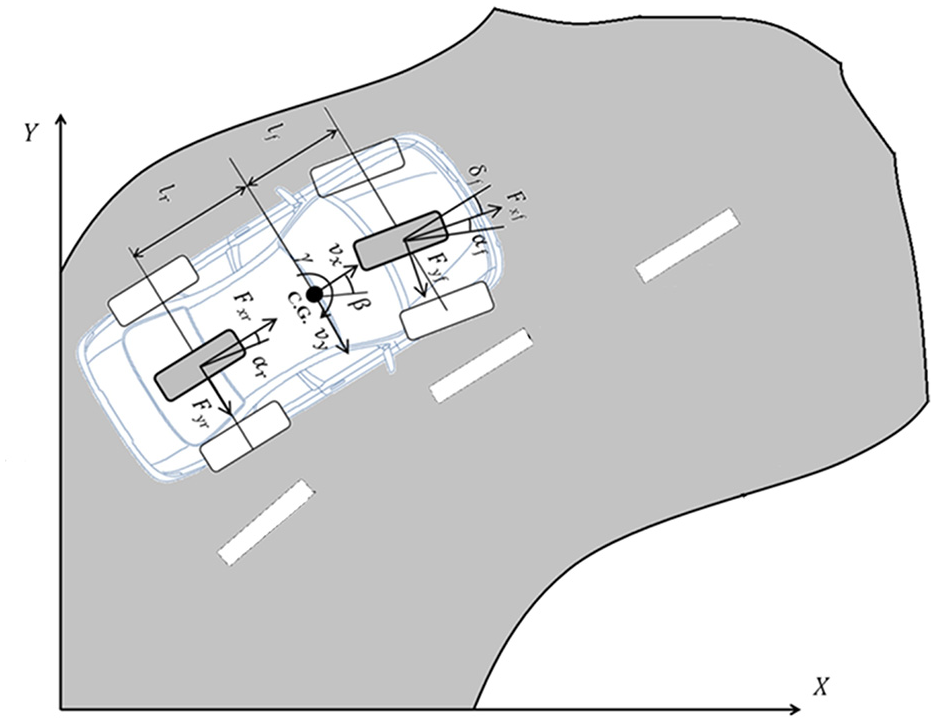
Yaw-plane 2-DoF model representation of the vehicle assuming right-and left-track symmetricity.
Yaw stabilization is an imperative step toward improved handling performance which is usually accomplished through the convergence of vehicle yaw-rate
where

where

Additionally, the tire cornering stiffness saturation and nonlinearity is possible to be characterized in terms of the uncertainty around the nominal values:

where
Additionally, the steering system dynamics is also incorporated in the present study. According to the steering system dynamics (Figure 2), the tire lateral force produces a moment around the kingpin as follows:

where

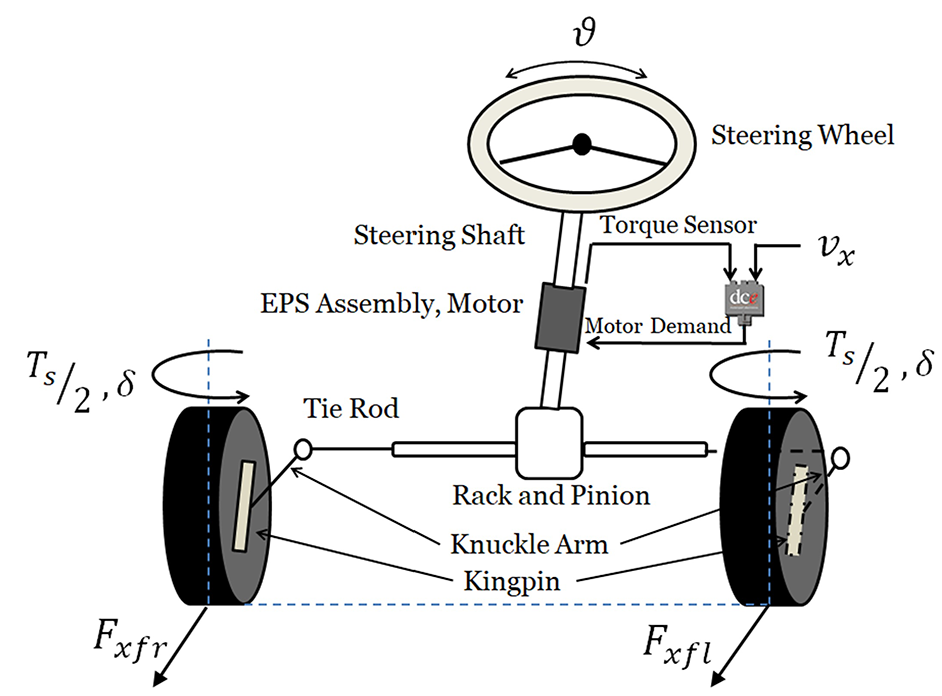
EPS-based steering system model considering steering-wheel torque feedback.
It is noteworthy that the moment is an external one applied to the front wheel and accordingly to the steering system. Therefore, the steering wheel governing equation of motion based on the rotation mode transferred about the kingpin is described as:
It is noteworthy that the term
By rearranging the governing equations of motion for the vehicle lateral dynamics related to vehicle lateral speed, yaw-rate and steering system, and the steering system, the following is obtained:
Accordingly, the general state-space representation of the system dynamics is derivable as follows:

where
Furthermore, it can be stated that

The desired yaw-rate and the body angle utilized as

Replacing (13) in (18) yields:

By assuming

Under the assumption that the system functions,

where

However, the functions
By adding and subtracting the term
Based on the observed states and the reference signals, it is evident to obtain:

Additionally, by applying (23) to (24), one will get:

By plugging in (25) into (26), one will obtain the error dynamics as follows:

Figure 3 represents the block diagram of the proposed control algorithm for improving the lateral stability of vehicles subject to external disturbances using the adaptive nonlinear state-observer and exponential sliding mode control scheme coupled to an optimization problem. In this paradigm, the NN observer estimates the unknown but limited functions of
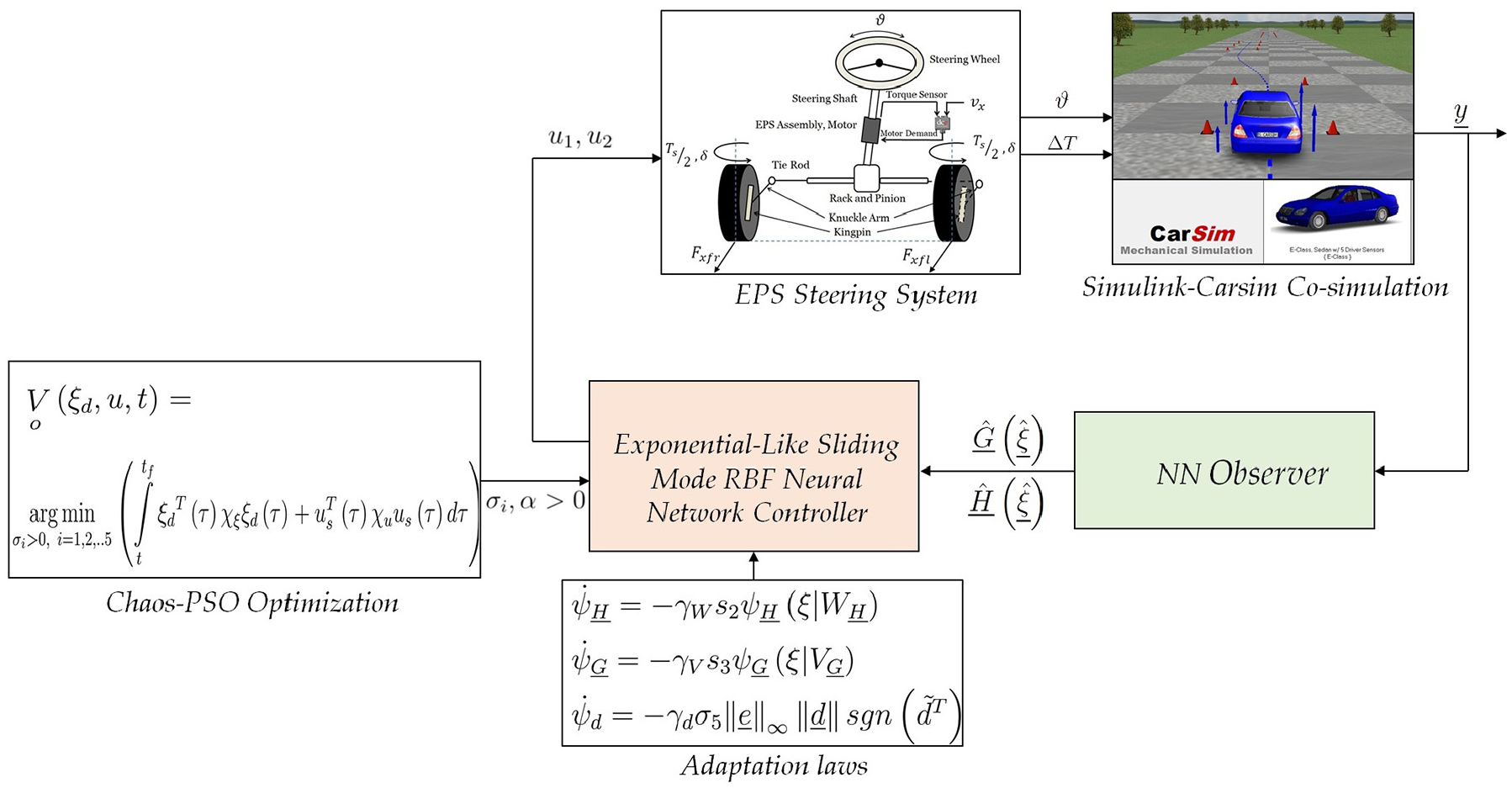
Block diagram of the proposed control algorithm.
To conclude, the following assumptions are made from the vehicle dynamics point of view:
A two-degree-of-freedom (2-DOF) bicycle model is sufficient to describe the fundamental handling characteristics.
Road is smooth, no compliance for chassis and suspensions is attributed, and the traveling speed is constant during the critical maneuvers.
The tire nonlinearity and saturation can be taken into account through the uncertainty functions from (4).
Neural networks
A neural network-based representation of the unknown functions

where
The resulting arguments may be expanded according to the defined vectors of weight for NN and the associated optimal terms represented in (30):
where the argument and

Therefore, once can represent the functions

where
Controller design
On the basis of the arguments explored, the developed control system will hold the capacity to approximate the unknown system dynamics by estimating the unknown functions

Theorem 1. Asymptotic stability of the system shown in (13) is accomplished in light of the adaptation laws as follows:
where
Proof. One can consider the approximation errors of the system functions with
where
where
Differentiation of (37) results in:
Accordingly, (38) can be written as:
In light of the fact that the estimation errors of
Equation (41) results in (42) by plugging-in the terms in (34):
wherein, the proposed control system is globally asymptotically stable. Furthermore, the convergence of the tracking error
Search of optimality
An important aspect of designing the adaptive robust controllers is to identify appropriate constants for the derived adaptation laws.
In addition to the global asymptotic stability, the rapid convergence and constraints on the control inputs are other issues that many of robust adaptive control studies simply exclude in the design of control analysis. To this end, the following cost-function is designed to be minimized according to the saturated control inputs and the tracking error minimization of
subject to the dynamics in (1) and (44):

The above optimization problem is solved through a modified Particle swarm optimization (PSO) approach. PSO is commonly known as the most popular meta-heuristic optimization tool employed in diverse optimization problems.27,28 Nevertheless, the premature convergence in multimodal problems serves as a main concern for this approach.
27
A fine tuning of the PSO parameters, such as the inertial parameters, improves the performance only slightly but at the exchange of a huge computational load. In classical PSO algorithms, the particles possess the problem space and embark on searching through stochastically zigzag-like orientations.
27
This pattern is indispensable to constantly move toward the global and local bests at once (i.e.
Results and discussion
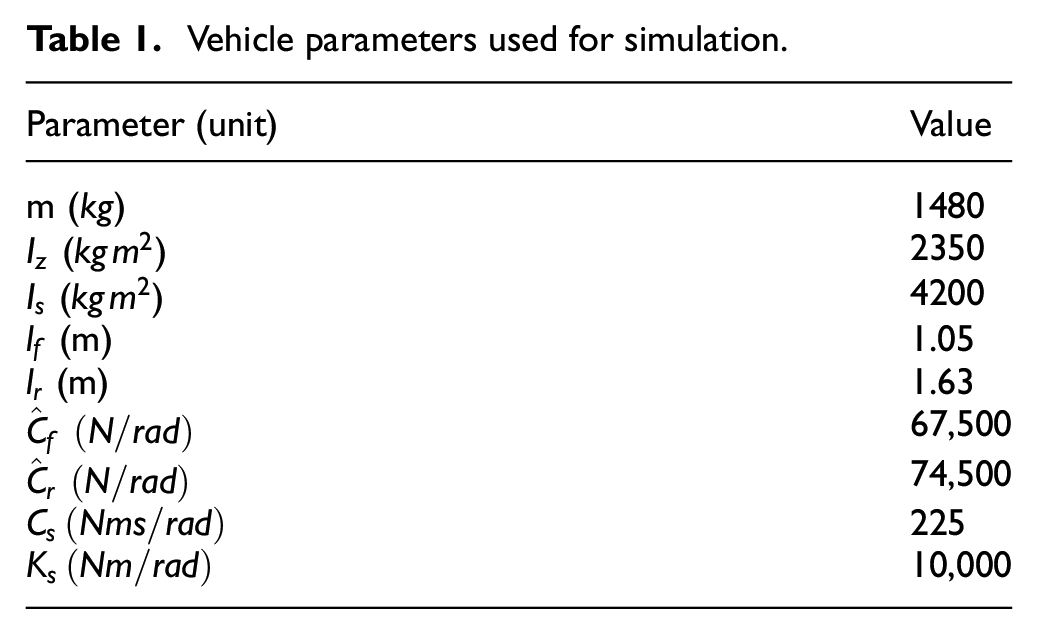
The model employed in this study for the dynamics of the vehicle is a commonly practiced approach among the reported studies (e.g. Taghavifar et al. 13 ). However, the present study contains the hugely influential dynamics of the steering system and adds the effect to the steering mechanism constrains into consideration. In addition to the nonlinearities introduced due to the steering system structure, the tire model nonlinearity accounts for the range after tire force saturation. The effectiveness of the proposed controller is investigated across various steering inputs. Additionally, the obtained responses for the vehicle are compared to the open-loop system to assess the benefits of employing the employed control system. The effectiveness of the proposed controller is also validated against the recently employed techniques for the vehicle lateral stabilization. The maneuvers employed for this purpose involved (i) a rectangular pulse, (ii) a step steering input, and (iii) a double-lane change to account for the entire steady-state and transient conditions. Furthermore, simulations are carried out for a vehicle at a relatively high speed of 100 km/h on a road characterized with a relatively low-adhesion coefficient of 0.4. Further simulation parameters are presented in Table 1.
Vehicle parameters used for simulation.
Rectangular pulse
Figure 4 demonstrates a comparison of the yaw-rate, slip-angle, and the steering wheel angles of the vehicle due to the proposed controller and an optimal robust control method reported in the recent literature by the author of the present paper. 13 Although both the vehicles with the employed controllers demonstrate the capacities to follow the desired yaw-rate signal, the vehicle with the proposed controller can converge much faster and closer to the desired yaw-rate. Additionally, the slip-angle and yaw-rate states of the vehicle demonstrate quicker convergence and responsiveness as compared to the optimal robust controller. It is also evident that the proposed controller holds the capacity to suppress the slip-angle state of the vehicle in a more drastic manner (Figure 4). Not only the optimal robust controller lags to reach the desired yaw-rate value, it also demands more than 2 s to return to the steady condition compared to the proposed controller. Furthermore, the time histories of the steering-wheel angle are suggestive of an inadequate rotation to generate the vehicle turning during the maneuver.
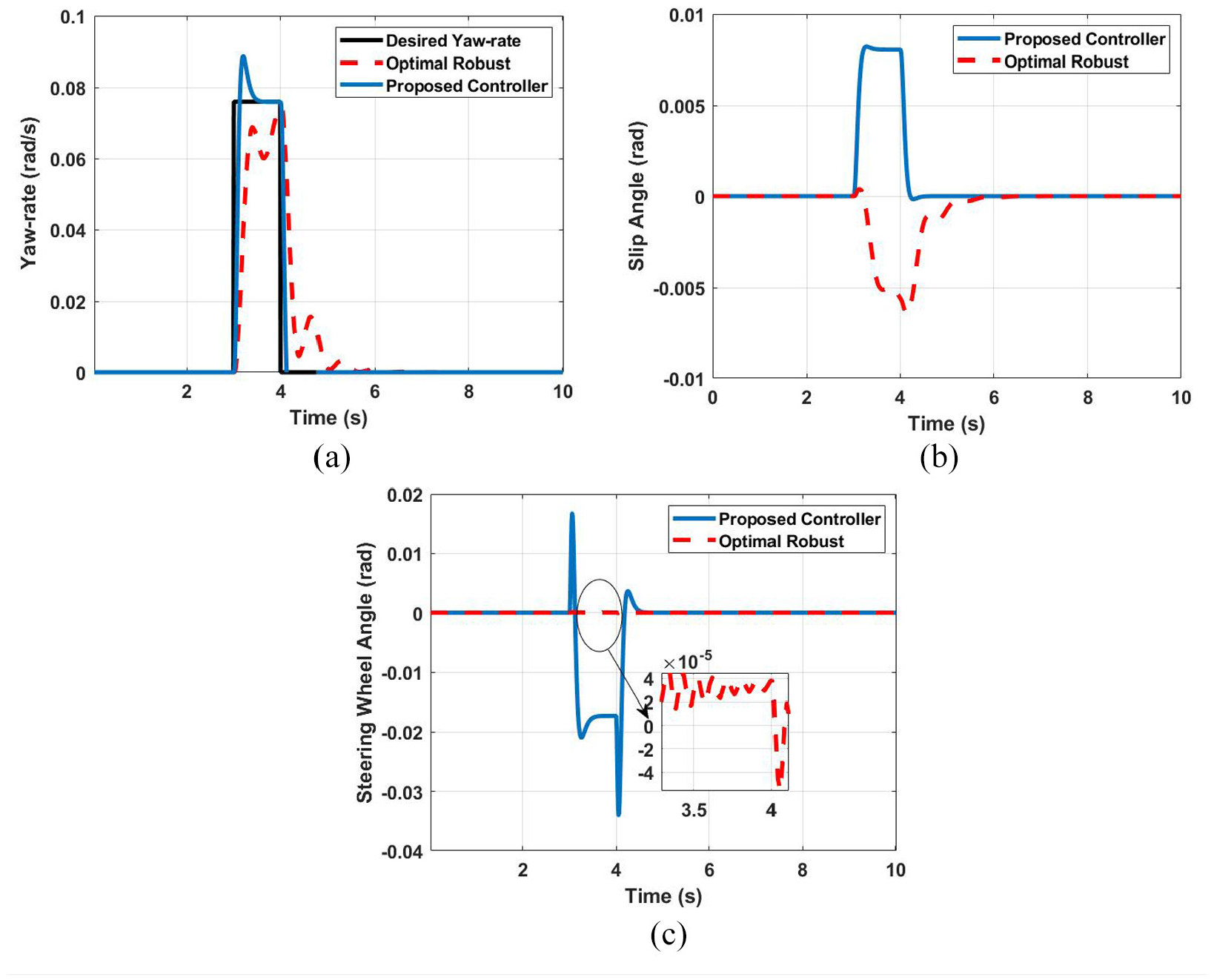
Time-histories of vehicle: (a) yaw-rate, (b) slip-angle, and (c) steering-wheel angle during rectangular pulse input.
Figure 5 illustrates the variations of the control inputs in terms of a combined AFS + DYC but in an individual manner. It is evident that the control signals are responsive and rapidly rise to catch up with the desired performance. A major concern in previous efforts of the combined AFS + DYC was the potential overload of one signal to take on the insufficient contributions from the other input. However, the range of variations for DYC stays within a reasonable band (i.e. maximum of 250 N.m.) due to the effective contribution of the AFS. It is also interesting to note that the vehicle efforts to generate the desired yaw-rate first by the aid of the AFS and the insufficiency are immediately compensated through the DYC input. Additionally, it is observed that AFS and DYC vary with a notable harmony that collectively contribute to address the desired maneuvering performance. The evident overshoot related to the yaw-rate response of the proposed method can be related to the quick rise time requirement. In terms of the output response, one can compromise between the rise time and the overshoot through the variations of the equivalent damping. The yaw-damping can be obtained through the tire construction and effective cornering stiffness.
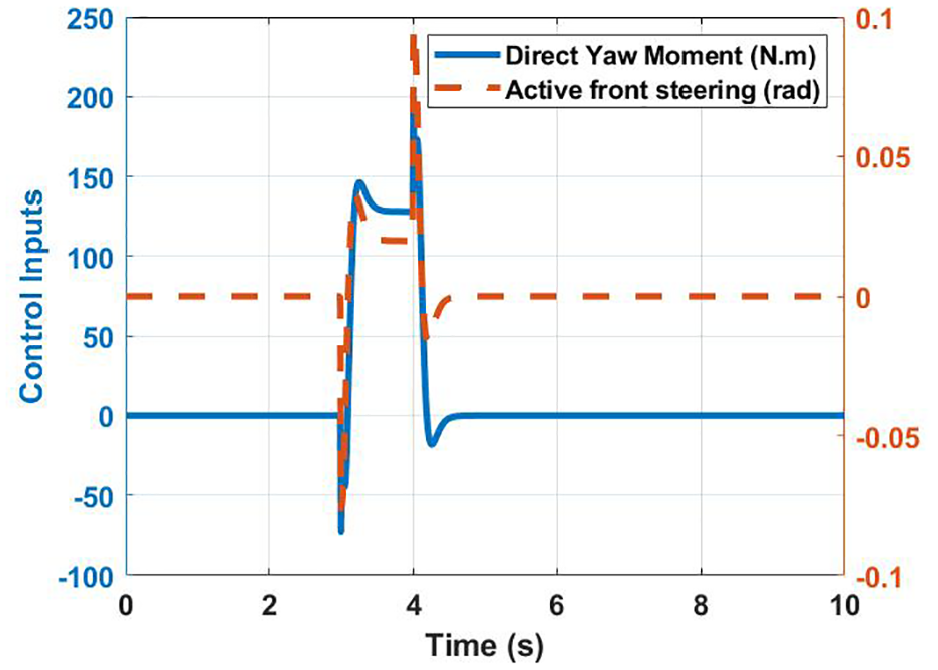
Time-histories of vehicle control inputs during rectangular pulse input.
Steady-state driving
In this section, a regularly tested steady-state test is considered according to the ISO 4138:2012 that describes the steady-state circular driving behavior through the open-loop test methods. 29 The desired yaw-rate to perform such a test is illustrated in Figure 6. Additionally, the yaw-rate responses of the car by employing the optimal robust controller and the proposed controller are compared in Figure 6, to verify the effectiveness of the developed algorithm. The considerably rapid rise time and setting time for the proposed controller compared to the benchmarking algorithm further confirms the capacity of the developed method for stabilization and to reach the desired trajectory. Additionally, the yaw-rate response for the optimal robust controller generates a little oscillatory characteristic which is obviously an undesirable behavior and promotes discomfort and instability for the passenger. Although there is a small overshoot for the proposed method, the rapider stabilization for about 2 s before the optimal robust algorithm is desirable for a safer maneuvering capacity of the vehicle. One should also note that such a time lag at 100 km/h can be bring about non-compensable perils and lack of vehicle lateral stability. Figure 6 also illustrates the time-histories of the vehicle slip-angle, which also confirms the rapid responsiveness of the proposed method which contributes to maximize the lateral acceleration about the corner. The steering wheel angle state comparison between the proposed controller and the optimal robust algorithm also demonstrates that a larger steering wheel angle is imposed on the vehicle with the developed technique. Of course, a small steering angle to maintain stability of the vehicle is desirable by substantially reducing the steering effort demand from the driver.
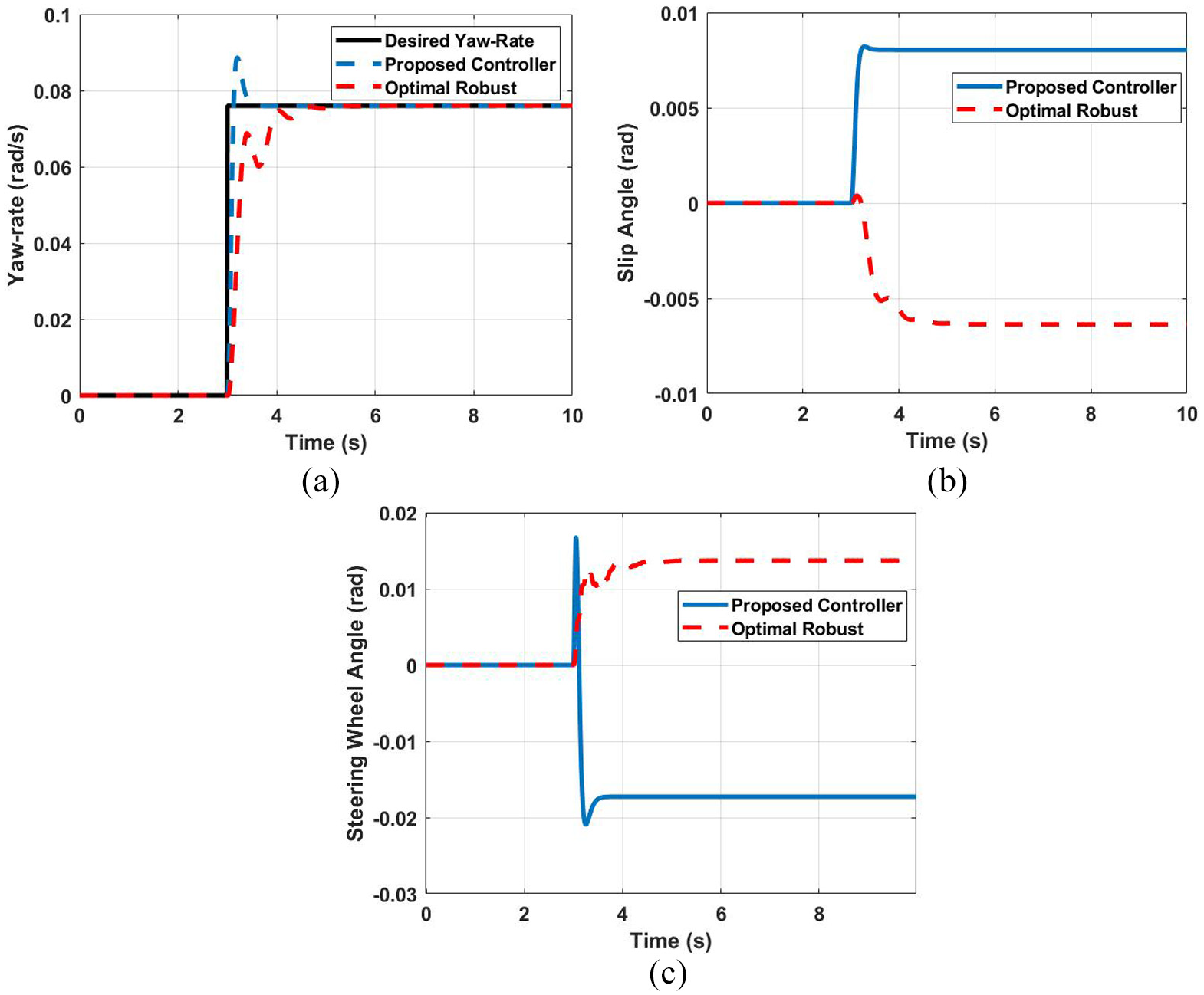
Time-histories of vehicle: (a) yaw-rate, (b) slip-angle, and (c) steering-wheel angle during CRC maneuver.
Double-lane change
The final testing platform in this paper for the effectiveness of the proposed controller is to perform a transient-based DLC maneuver according to ISO 3888-1:2018. It is appreciated from Figure 7 that not only the yaw-rate is bounded at lower range for the vehicle with optimal robust controller, but there is a considerable phase lag as compared to the desired-yaw rate. However, the rapid response of the proposed controller to the yaw-rate change is suggestive of its effectiveness to ensure the vehicle lateral stability. Additionally, the sip-angle and steering-wheel angle responses of the vehicle with the optimal robust controller are compared to the proposed controller in Figure 7. It is evident that there exists an observable difference between their tendencies. Finally, Figure 7 illustrates the variations of the tracking error for the yaw-rate actual following the desired yaw-rate. It is noticed that the largest variations belong to the optimal robust control method and the proposed algorithm approves efficient to constrain such tracking errors. Additionally, Figure 8 demonstrates the lateral force components applied to the front and rear wheels. It is evident that the generalized lateral forces are maintained in reasonable regions. This guarantees the existence of the directional acceleration and thus, nonzero lateral speed of the vehicle during this transient maneuver. A certain level of the lateral speed contributes to a smooth cornering experience. Additionally, Figure 8 illustrates the directional acceleration variations for the vehicle under the proposed control framework. There are slight variations of the longitudinal acceleration that are imposed through the DYC approach. The largest variations are observed for the lateral acceleration and the drastic changes might be attributed to the sudden path changes and the demand to generate the yaw-rate owing to the nonholonomic constraints existing for the vehicle. Figure 9 represents the path tracking performance of the vehicle with the optimal robust and the proposed controller in the global coordinate system. It is appreciated that the DLC maneuverer is carried out perfectly, with only infinitesimal tracking error, unlike the optimal robust counterpart which brings about a considerable offset level together with a large phase lag. It is also further confirmed that the proposed controller effective and robust even though a satisfactory path following is accomplished with fluctuations in the longitudinal acceleration.
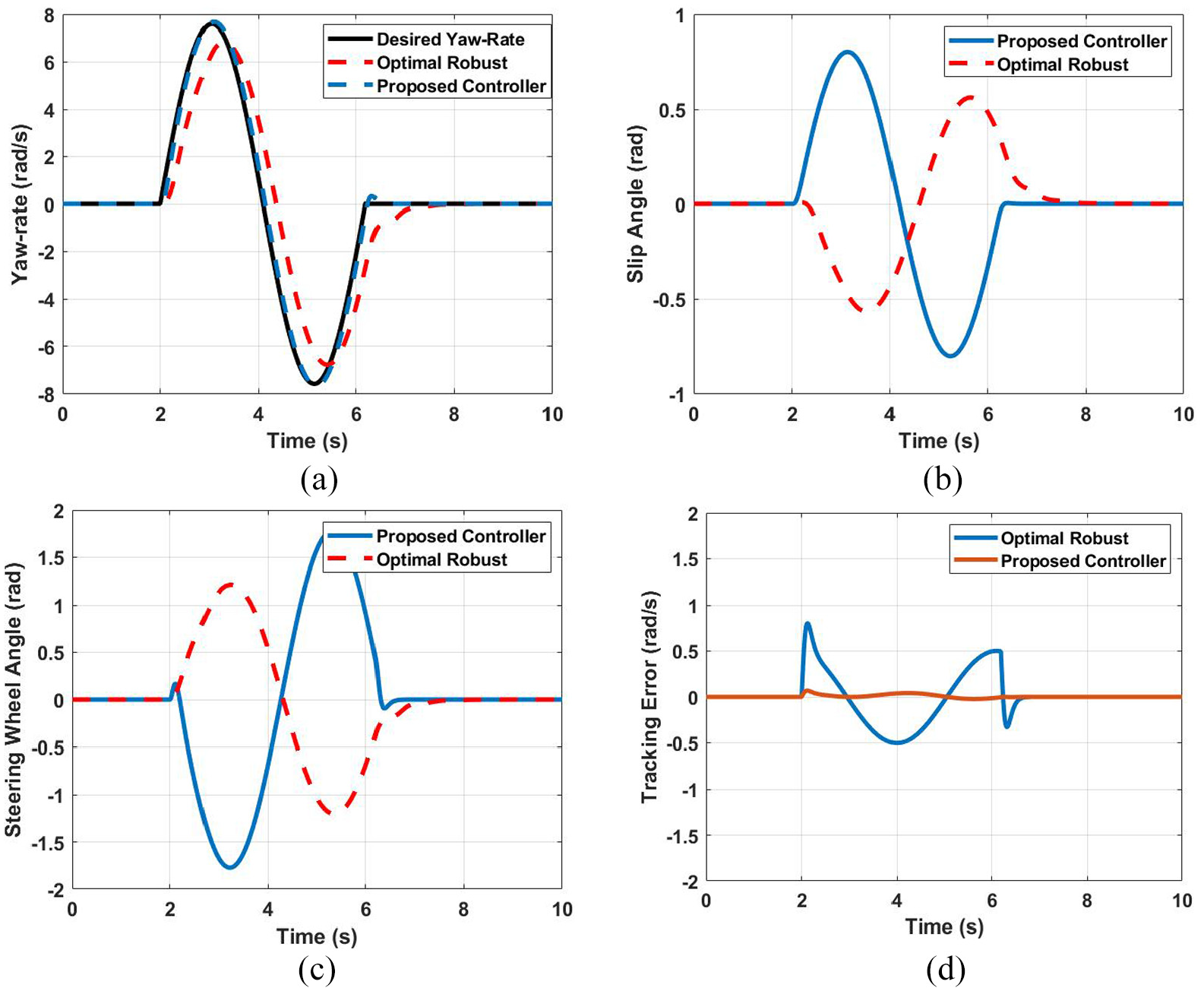
Time-histories of vehicle: (a) yaw-rate, (b) slip-angle, (c) steering-wheel angle, and (d) yaw-tracking error during DLC maneuver.
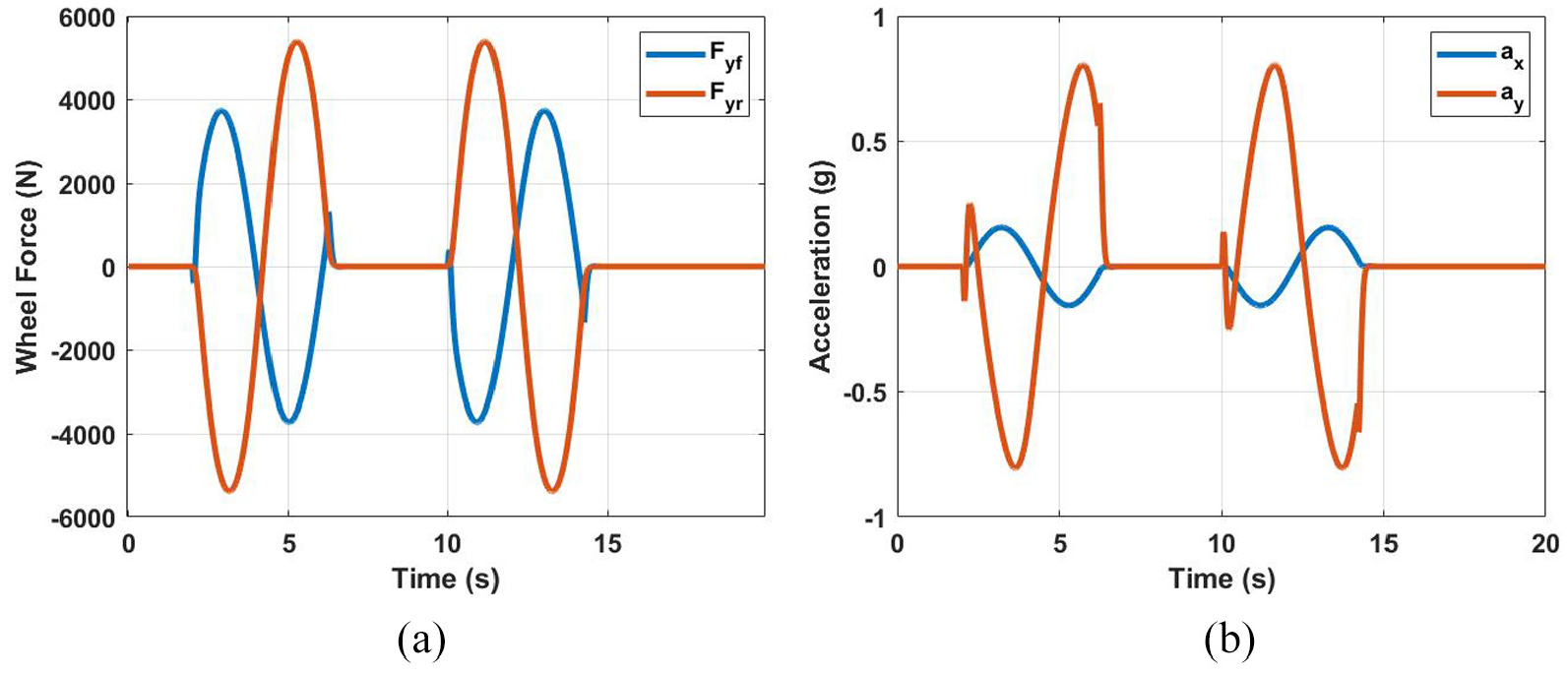
Time-histories for: (a) front and rear wheels lateral forces and (b) directional accelerations of vehicle C.G. during DLC maneuver.
Robustness to external disturbances
The robustness of a controller to structured and unstructured uncertainties plays a significant role in the overall performance of the vehicle. Therefore, a gust of cross-wind effect was investigated on the robustness of the proposed controller, compared to the optimal robust and the system without any controller. The obtained results are plotted in the global-coordinate system to view the trajectory of the vehicle while intending to travel on a straight path subject to the gust of wind for duration of 1 s in the shape of a rectangular pulse with the magnitude of 2000 N. It is known that the trajectory of a vehicle in a neutral-steering (NS) manner is more desirable that the under-steering (US), while over-steering (OS) promotes instability. The obtained results demonstrate that the proposed controller is not affected by the cross-wind gust during its travel while the optimal robust has demonstrated a US characteristic and has shifted more than 2 m laterally in less than 300 m of the longitudinal travel (Figure 10). However, the weakest performance is attributed to the vehicle without any controller than exhibits a largely OS performance and vehicle stability is lost in less than 100 m. Therefore, the inevitable demand for a high-performance controller as proposed in this paper is encapsulated in light of the represented results in Figure 10.
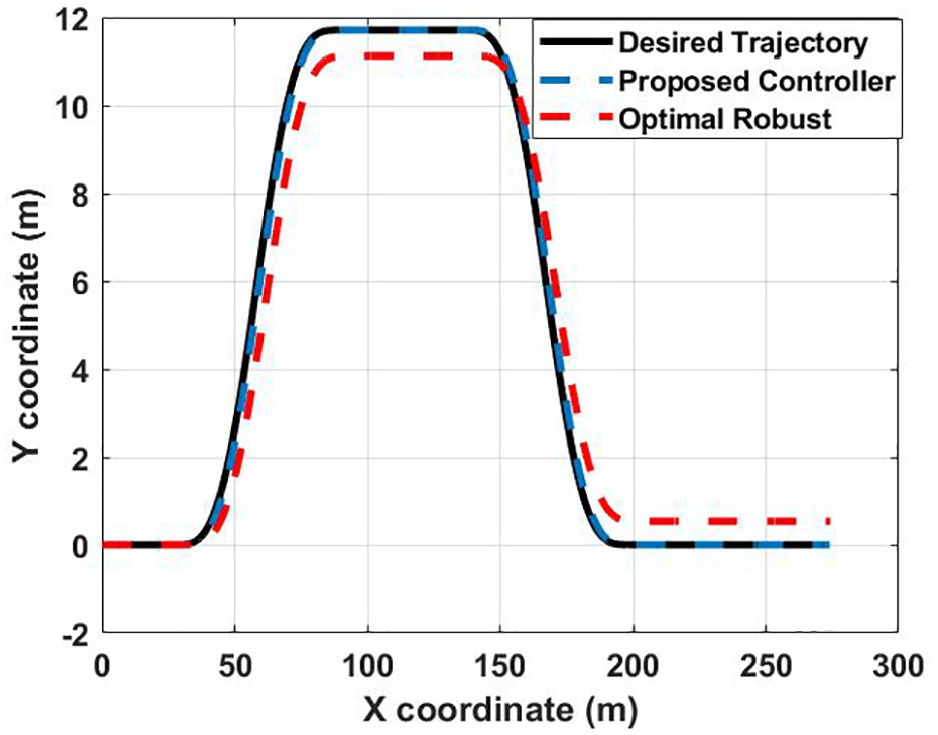
Global trajectory of the vehicle for path following during DLC maneuver.
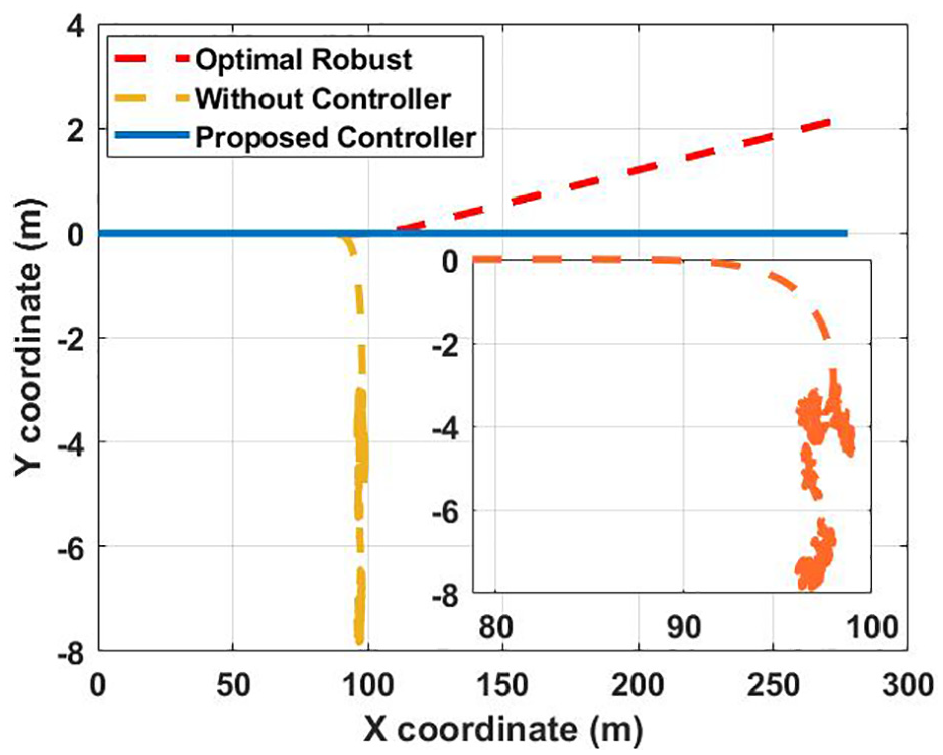
Global trajectory representation of vehicle subject to cross-wind disturbance under different control schemas.
Conclusions
The present paper mainly contributes through the development and synthesis of a coordinated AFS + DYC control framework in order to enhance the vehicle lateral stability and maneuverability. For this purpose, the steering mechanism dynamics and states are also incorporated. The approximation capacity of the radial basis function (RBF) neural network system is also employed for the closed-loop system as well as the designed state observer. The adaptation mechanism is obtained through the Lyapunov stability theory. In order to improve the robustness of the closed-loop vehicle, the SMC approach is practiced while the sliding surface of the tracking errors converges to the asymptotic stability condition through the design of a smooth exponential reaching law. The effectiveness of the proposed control scheme was evaluated against a high-performance optimal robust control technique as well as the open-loop system. In order to assess the robustness of the proposed algorithm, the structured and unstructured uncertainties were also incorporated in terms of the parametric uncertainties such as the tire cornering stiffness and cross-wind gust disturbance. In order to analyze the closed-loop system against the extraneous disturbances, it was traveled on a straight path subject to the gust of wind for duration of 1 s in the shape of a rectangular pulse with the magnitude of 2000 N. The obtained results demonstrate that the proposed controller is not affected by the cross-wind gust during its travel while the optimal robust has demonstrated a US characteristic and has shifted more than 2 m laterally in less than 300 m of the longitudinal travel. However, the weakest performance is attributed to the vehicle without any controller than exhibits a largely OS performance and vehicle stability is lost in less than 100 m.
Footnotes
Appendix
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.