
Abstract
This paper proposes an alternative approach based on a fuzzy-interval analysis to assess how dimensional tolerances affect the kinematics of parallel manipulators. The novel contribution of the proposed approach consists of modeling and analyzing the dimensional tolerances as fuzzy-intervals based on fuzzy theory and interval sensitivity methods. The dimensional tolerances are modeled as intervals weighted by the membership function for the proposed fuzzy-interval approach. The proposed fuzzy-interval analysis is used to analyze the positioning error, sensitivity, and design analysis. The proposed fuzzy-interval method was applied using numerical simulations to assess the effect of dimensional tolerances and sensitivity of parallel manipulators. The proposed approach showed as a complementary procedure that can be used in the design phase of parallel manipulators.
Introduction
Several methods have been proposed to evaluate the uncertainties and dimensional tolerances on the parallel manipulator’s kinematics to enhance the design procedure. These computational methods aim to evaluate the contribution of different uncertain input factors to a mathematical model’s output to examine the error analysis, sensitivity, and optimization.
Concerning the error analysis, several procedures have been studied to evaluate the consequences of errors and joint clearances on positioning accuracy based on kinematics. The 3-UPU parallel mechanism sensitivity showed high sensitivity of kinematic outputs to specific clearances in the universal joint. 1 The positioning error was obtained based on a kinematic approach rather than kinetostatics methods, which considers the loads applied to the mechanism. 2 Voglewede and Ebert-Uphoff 3 applies generation methods in the workspace to define the unconstrained the end-effector motion of parallel manipulators. Venanzi and Parenti-Catelli 2 include the joint clearance error as small-displacements screws that permit the maximum end-effector error. Meng et al. 4 analyzes the parallel manipulators accuracy subjected to joint clearances. A study of the error analysis applied on parallel manipulators has been carried out based on Venanzi and Parenti-Catelli 2 by using standard convex optimization problem. 5
On the other hand, the sensitivity analysis of mechanism dynamics has captured the attention of researchers for analysis and design proposes. 6 Several approaches have been proposed to analyze the sensitivity of mechanism and robotic manipulators: response surface method,7,8 local derivative-based method,9–11 and interval linearization method. 12 The kinematics and dynamics of the parallel manipulators were assessed by applying the sensitivity analysis. The sensitivity has been used mainly to evaluate the relative influence of every geometric errors on the end-effector positioning. Consequently, the sensitivity analysis allows determining the critical parameters to positioning accuracy in the early design phase.
The robust optimization of kinematic performance maximizes the kinematic performance and simultaneously minimizes the errors produced by the dimensional tolerances of the geometric parameters. 13 The design criteria sensitivity to geometric parameters tolerances has been used for the optimal design of manipulators 14 ; moreover, the sensitivity analysis was used to minimize the robustness against uncertainties. 15
Several research studies have suggested that complementary methodologies used for the optimization of robotic manipulators are necessary to enhance the results obtained from the optimal design.16,17 In this way, the sensitivity analysis has presented potential benefits in the optimal design of manipulators. 18 Moreover, the development of novel numerical methods to quantify the effects of dimensional tolerances, manufacturing errors and varying parameters is necessary. In this direction, theoretical developments to obtain novel performance indices have been formulated based on the error analysis, 19 uncertainty quantification, 20 and reliability. 21 Nevertheless, few studies have focused on the sensitivity of parallel robots.
The sensitivity analysis has been widely used to quantify how the dimensional tolerances and errors affect the kinematic accuracy. Nevertheless, the error analysis, sensitivity and optimization of manipulators has not assessed the uncertainties as fuzzy variables. The advantage of the proposed approach consists in evaluating the tolerances as intervals that consider a range of variation, and it permits sensitivity assessment. Unlike the previous approaches, the fuzzy-interval approach does not require the definition of the probability distribution function for the tolerances defined as random variables20,21; as an additional advantage, the tolerance is not evaluated just for a single value.9–11 The present research study proposes a methodology to analyze parallel manipulators’ kinematic error and sensitivity by considering dimensional tolerances modeled as fuzzy variables. Moreover, the proposed approach quantifies the sensitivity of the kinematic model subject to dimensional tolerance and geometric parameters modeled as intervals derived from the fuzzy variables definition; that is, the sensitivities of the geometric parameters are evaluated aiming at maximizing the workspace size of the manipulators. The novel contribution of the proposed approach consists of modeling and analyzing the dimensional tolerances as fuzzy-intervals based on fuzzy theory and interval sensitivity methods.
Initially, the model of the dimensional tolerances is presented based on the
This paper is organized into four sections. Section 2 presents the proposed interval analysis for the manipulators. Section 3 presents the case studies that analyze the effect of dimensional tolerances modeled as fuzzy-intervals on the parallel manipulators. Finally, Section 4 presents the conclusions.
Fuzzy-interval approach
The approach presented in this contribution for the fuzzy-interval analysis considers non-probabilistic modeling.22,23
Interval representation of fuzzy variables
Initially, the fuzzy variables of Figure 1(a) are defined based on an interval approach. Fuzzy variables are a simple representation of uncertain parameters that does not require the definition of the probability distribution function of the random variables. Let be
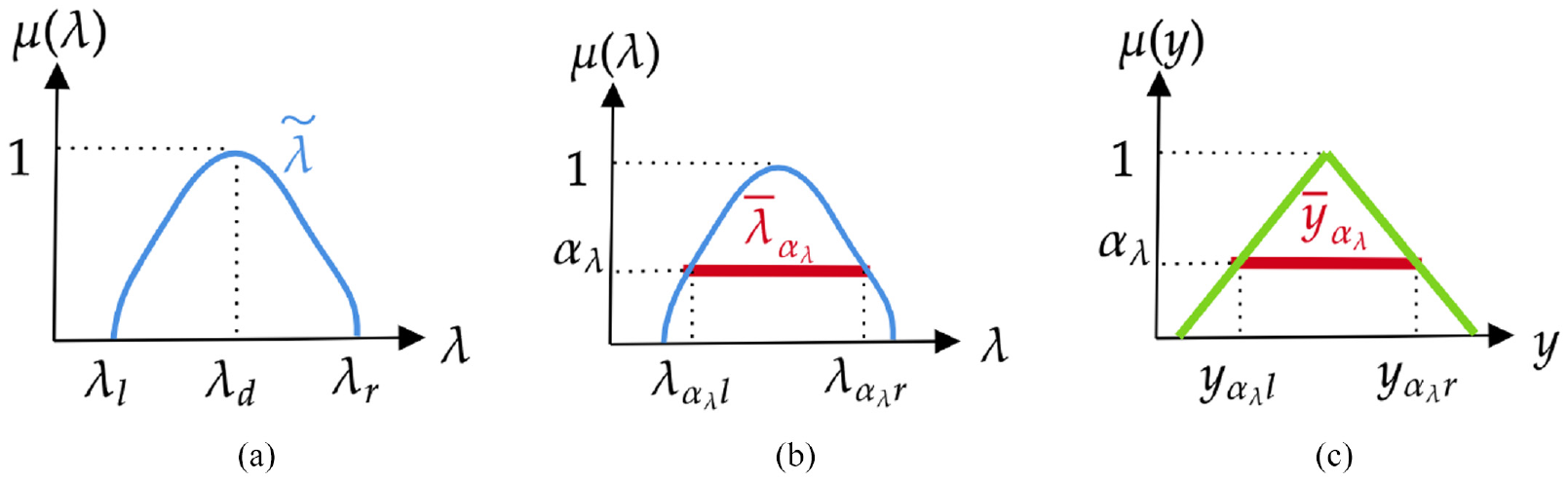
Fuzzy definitions: (a) fuzzy parameter, (b) interval representation, and (c) fuzzy output.
On the other hand, the fuzzy variable

where
For computational purposes, the fuzzy variable

The interval

Fuzzy-interval analysis
This analysis considers a performance index of the manipulator’s kinematic model (see equation (3)). Therefore, the performance index y depends on the input parameters

where
By considering the input parameters of equation (3) as fuzzy variables

where
The interval representation defines the fuzzy output

Moreover, the fuzzy output

where
It worth mentioning that the intervals

The implementation of the proposed fuzzy-interval analysis is showed in the flowchart in Figure 2. For computational proposes, the input parameters
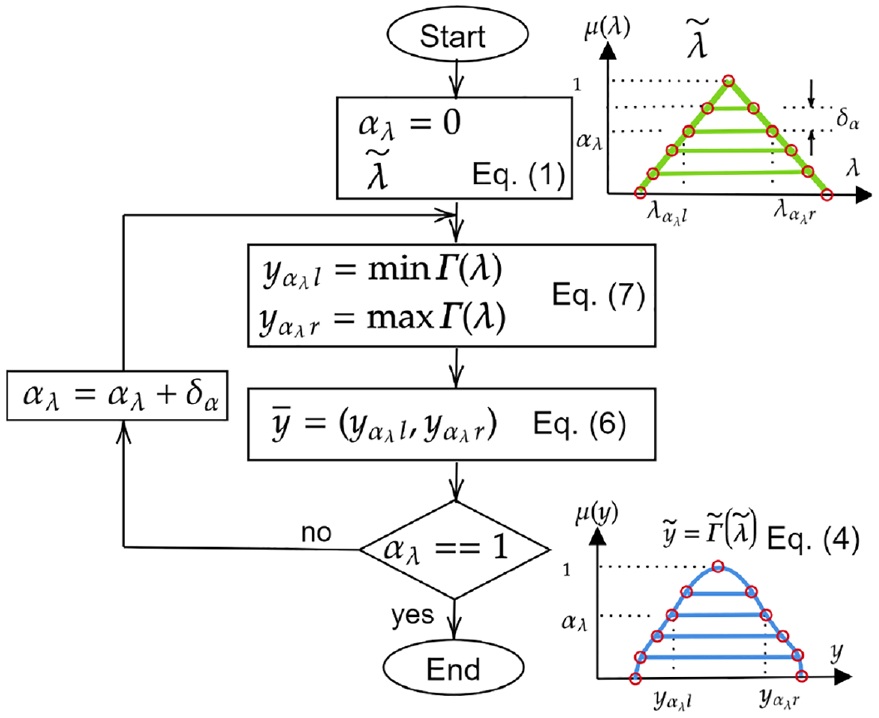
Flowchart to implement the fuzzy-interval approach.
The interval approach is used to evaluate the manipulator’s kinematics, such as the forward kinematic model, or an algorithm to assess the workspace size subjected to interval inputs, such as the dimensional tolerances of links.
Interval sensitivity analysis
The interval methods of the present contribution were inspired by the research works suggested by Moens and Barbosa et al.25,26 The sensitivity aims at quantifying the contribution of every fuzzy parameter on the output of the manipulator. For example, the sensitivity analysis could determine the relative contribution of the fuzzy-interval link dimensional tolerance on the interval end-effector positioning error. The sensitivity can help to determine the degree of influence of every parameter on the kinematic performance. In the present analysis, the input fuzzy parameters,
Initially, the interval output radius

The output

The correlation of the interval widths of

where

The normalization of the interval sensitivity is shown in equation (12); this normalized sensitivity quantifies the total effect of every interval input on the output.

The normalized sensitivity
Moreover, the absolute interval sensitivity is derived from the interval radius of equation (8). Thus,

The upper

indicate that
The sensitivity limits (
The flowchart of Figure 3 illustrates the implementation of the interval approach. The normalized interval sensitivity
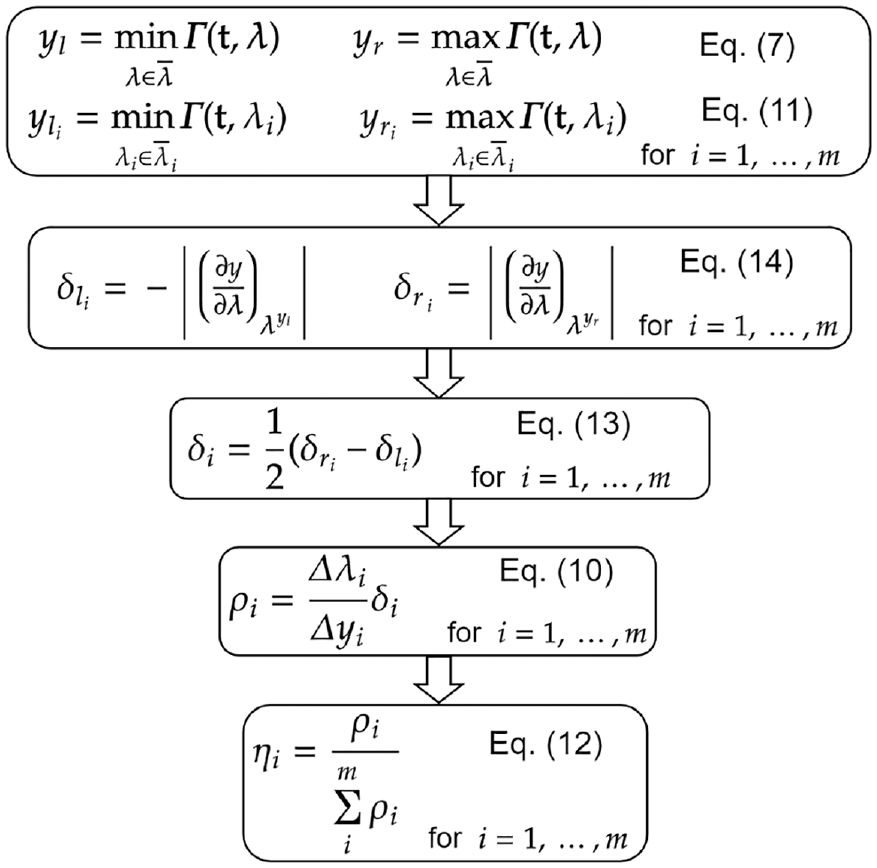
Flowchart to implement the interval sensitivity approach.
Case studies
This section considers the application of the fuzzy-interval approach to assessing the effect of dimensional tolerances modeled as fuzzy-intervals. First, the effect of joint error models on the positioning error of a planar parallel manipulator is analyzed. Then, the interval sensitivity is illustrated as a complementary method to illustrate the dimensional tolerance on a Delta manipulator. Finally, the fuzzy-interval approach is applied to the optimal design of a Cartesian Parallel Manipulator.
Positioning error analysis of 5R parallel manipulator
Figure 4 presents the 5R parallel manipulator. The frame O is fixed at the segment
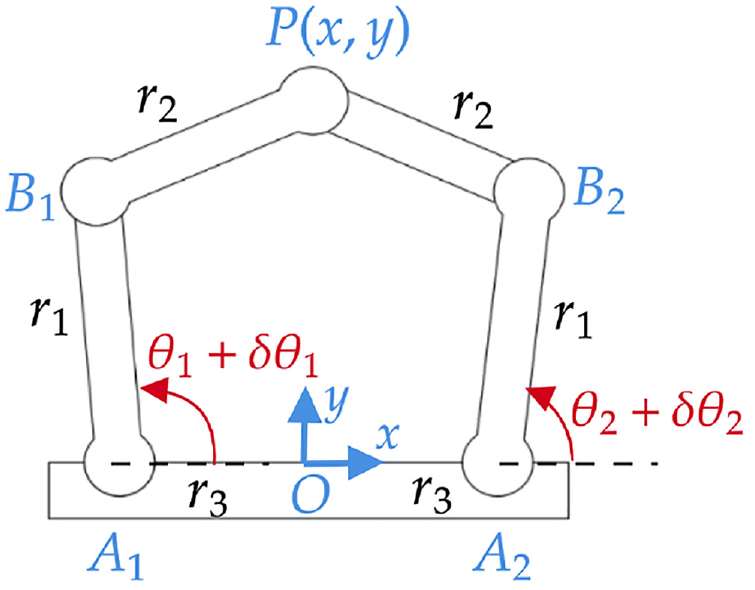
5R parallel planar manipulator.
The error analysis consists in solving the forward kinematics by taking into account the active joint errors

where,
The positioning error is computed using the fuzzy-interval approach of Section 2.2 and the flowchart of Figure 2. Hence, two different definitions of the positioning error were considered as the kinematic function (

The positioning of the x and y axes is considered separately in equation (16), that is, the solution to the optimization problem of equation (7) should be carried out twice to obtain
The Monte Carlo Simulation is carried out to compute the positioning error following two steps:
Initially, Figure 5 shows the y-axis end-effector coordinate
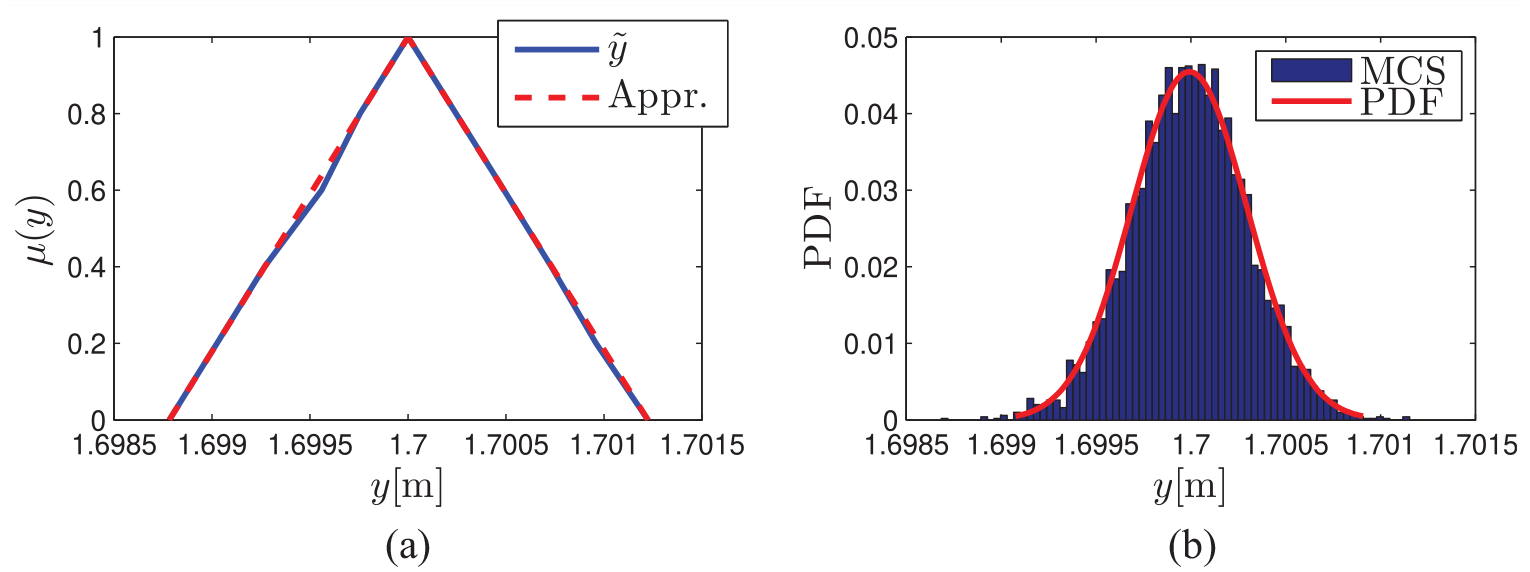
y-Axis end-effector position evaluated with the fuzzy-interval approach and MCS: (a) workspace and (b) error evaluation.
The end-effector position at
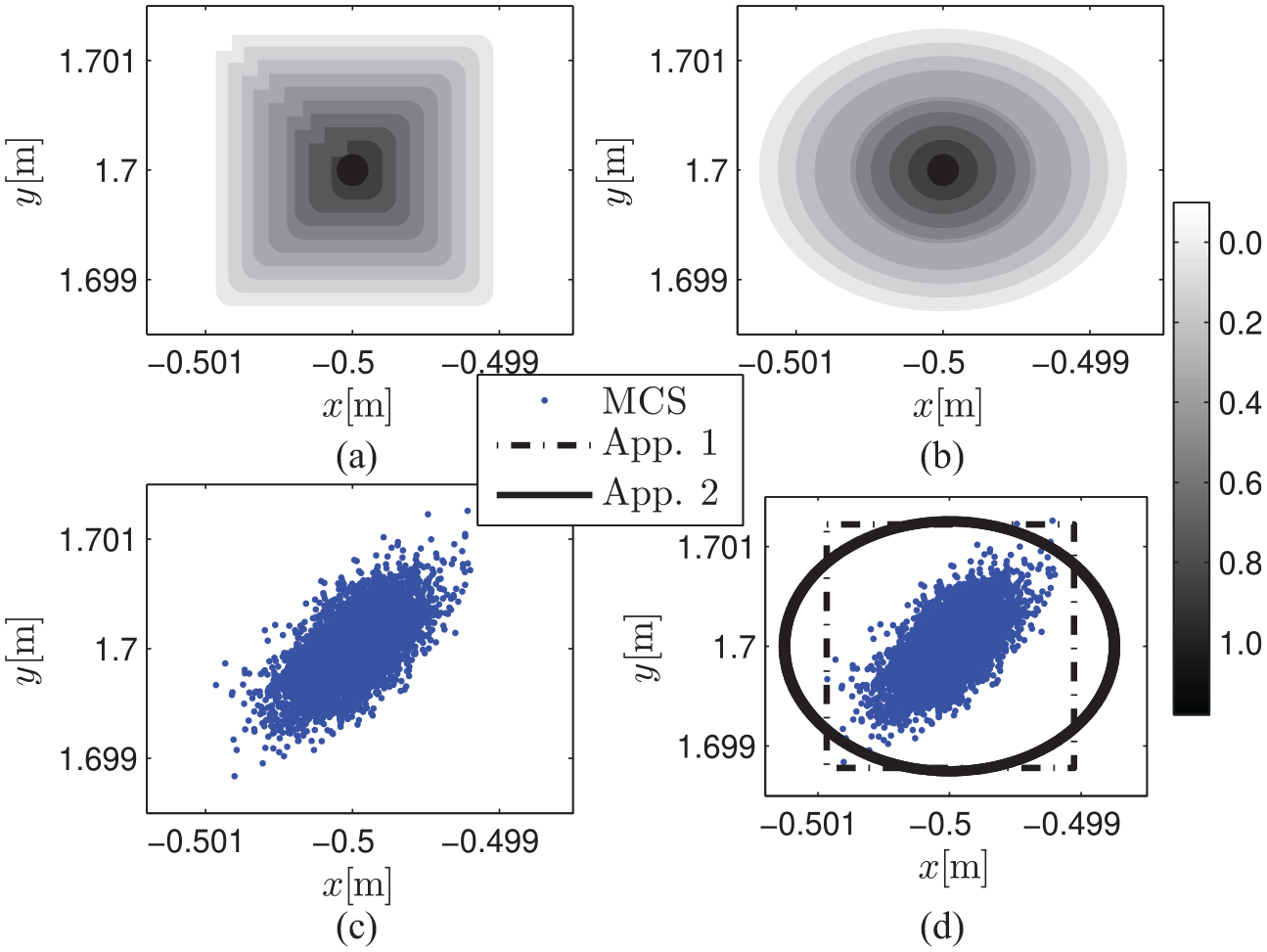
End-effector error by using the fuzzy-interval approach: (a) fuzzy-interval with equation (16), (b) fuzzy-interval with equation (17), (c) MCS, and (d) approaches comparison.
The end-effector error will be evaluated at six different positions within the usable workspace (see Figure 7(a)). Figure 7(b) shows the results at four different end-effector positions ((
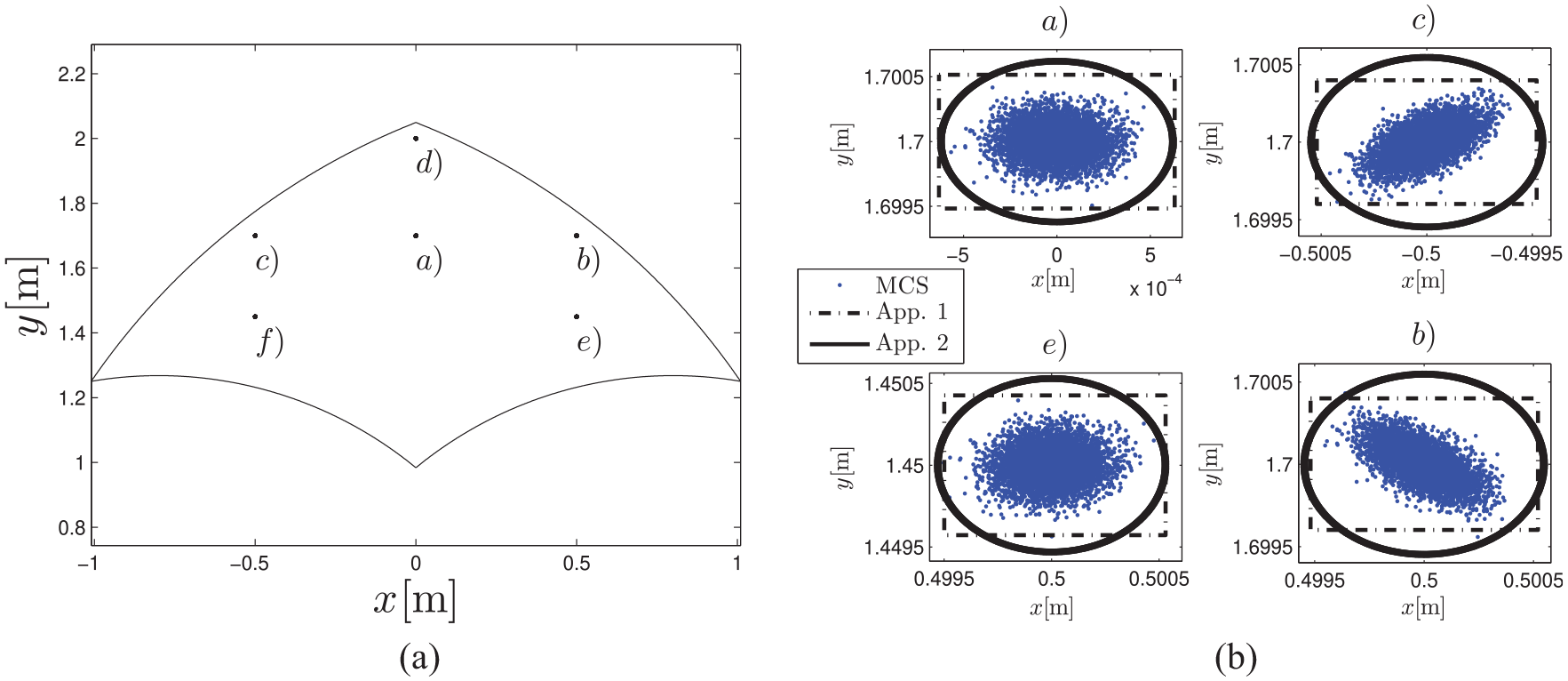
Error evaluation for the 5R parallel manipulator: (a) workspace and (b) error evaluation.
Positioning error analysis: fuzzy-interval and Monte Carlo simulation.

Sensitivity analysis of the delta parallel manipulator with fuzzy parameters
The evaluation of dimensional tolerance of links on end-effector error is carried out through the interval sensitivity approach. The proposed interval sensitivity is compared to derivative-based local methods that have already been used to assess the length links variations of parallel manipulators. 10
The Delta manipulator has three identical kinematic chains between the fixed base and the moving platform. The frames
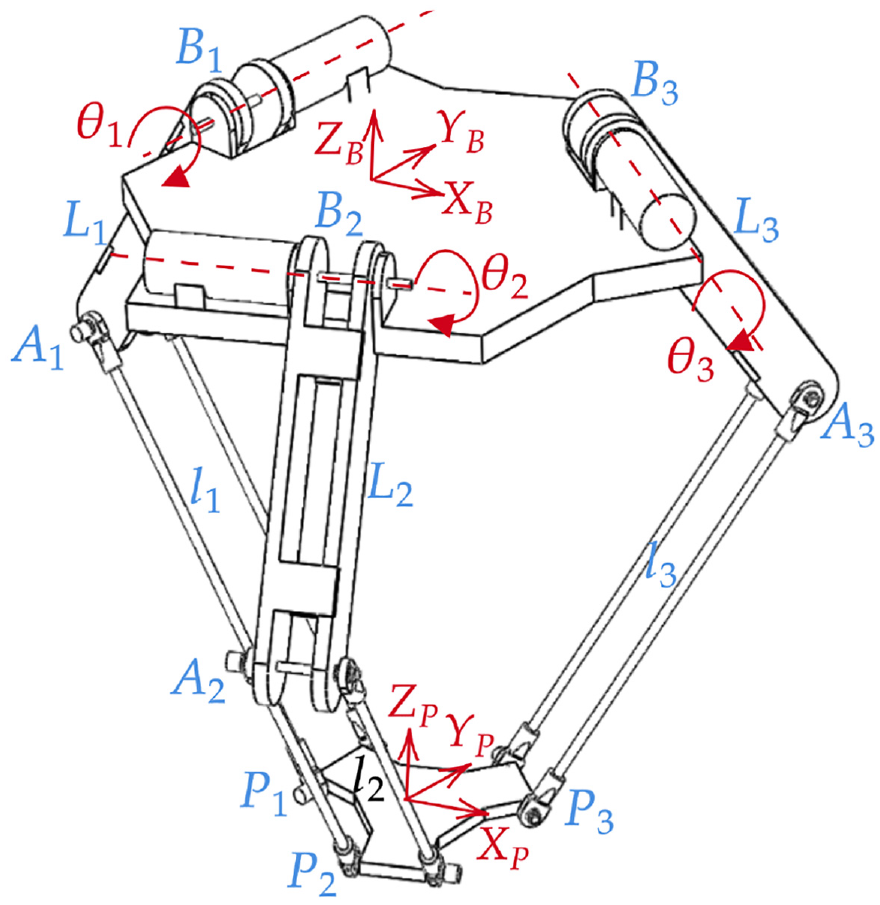
Delta manipulator and its geometric parameters.
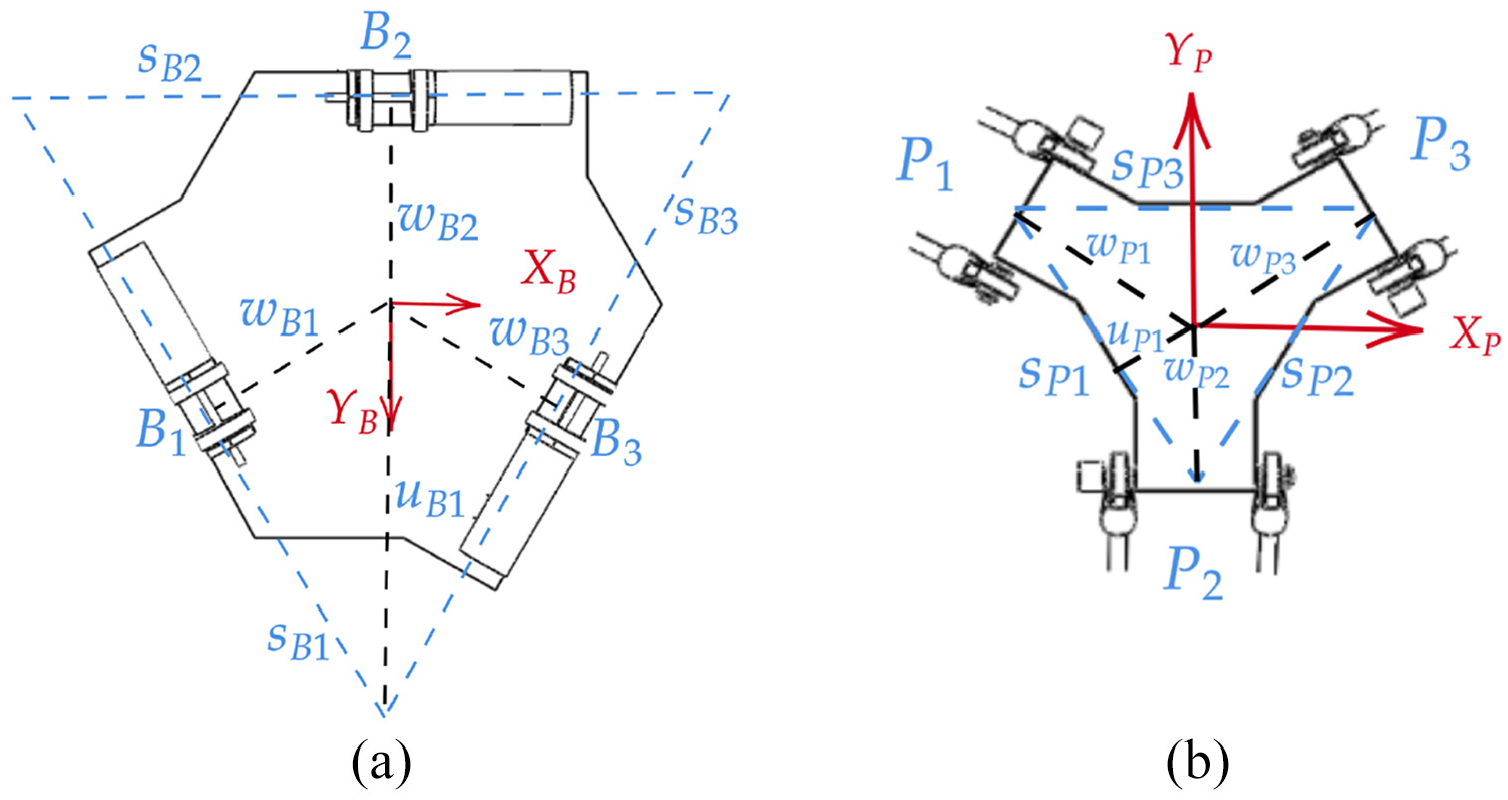
Delta manipulator: fixed base and moving platform geometric definition. (a) Fixed base and (b) Moving platform.
The fixed base is defined based on the equilateral triangle in which the Cartesian frame
Application of the interval sensitivity analysis
The interval sensitivity quantifies how the interval geometric parameters affect the positioning error of the kinematic chains. The sensitivity analysis algorithm of Figure 3 is applied for every kinematic chain j = 1,2,3 considering the interval inputs
The geometric parameters of the manipulator are defined as triangular fuzzy variables
Geometric parameters of the Delta manipulator.

The kinematic model computes the positioning error for every kinematic chain as a function of the geometric parameters and the end-effector position,

Therefore, according to equation (3), the model for the present application is
The optimization problems of equations (7) and (11) are solved by using the Genetic Algorithm (GA)
28
of the Matlab optimization toolbox. The population was fixed as 20 individuals for every input interval parameter; the upper and lower limits for the search space are
Results and analysis
Eighth different end-effector positions over the workspace are considered in this analysis as presented in Figure 10. Figure 10 presents the workspace and the analyzed end-effector positions, thus the plane xy for
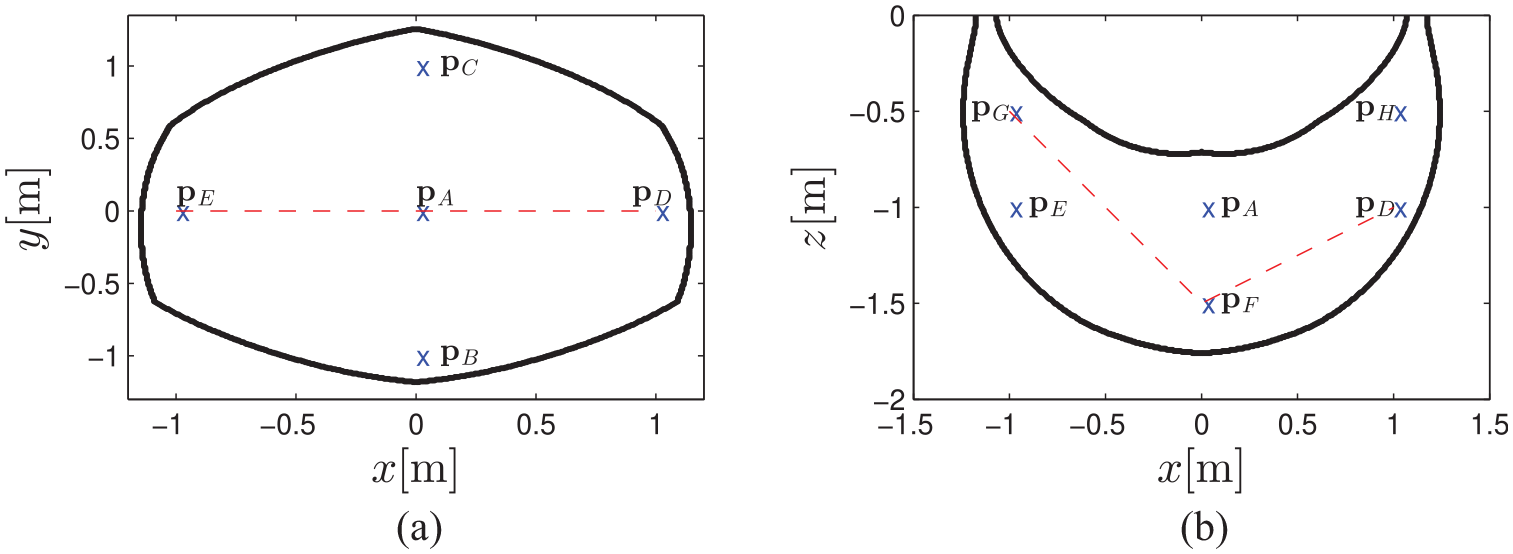
Workspace of the Delta manipulator: (a) plane xy for
Initially, the positioning error sensitivity to the dimensional tolerances is computed by using the derivative-based local (see Appendix A) and the interval sensitivity to compare these two approaches. Figure 11 shows the sensitivity coefficients
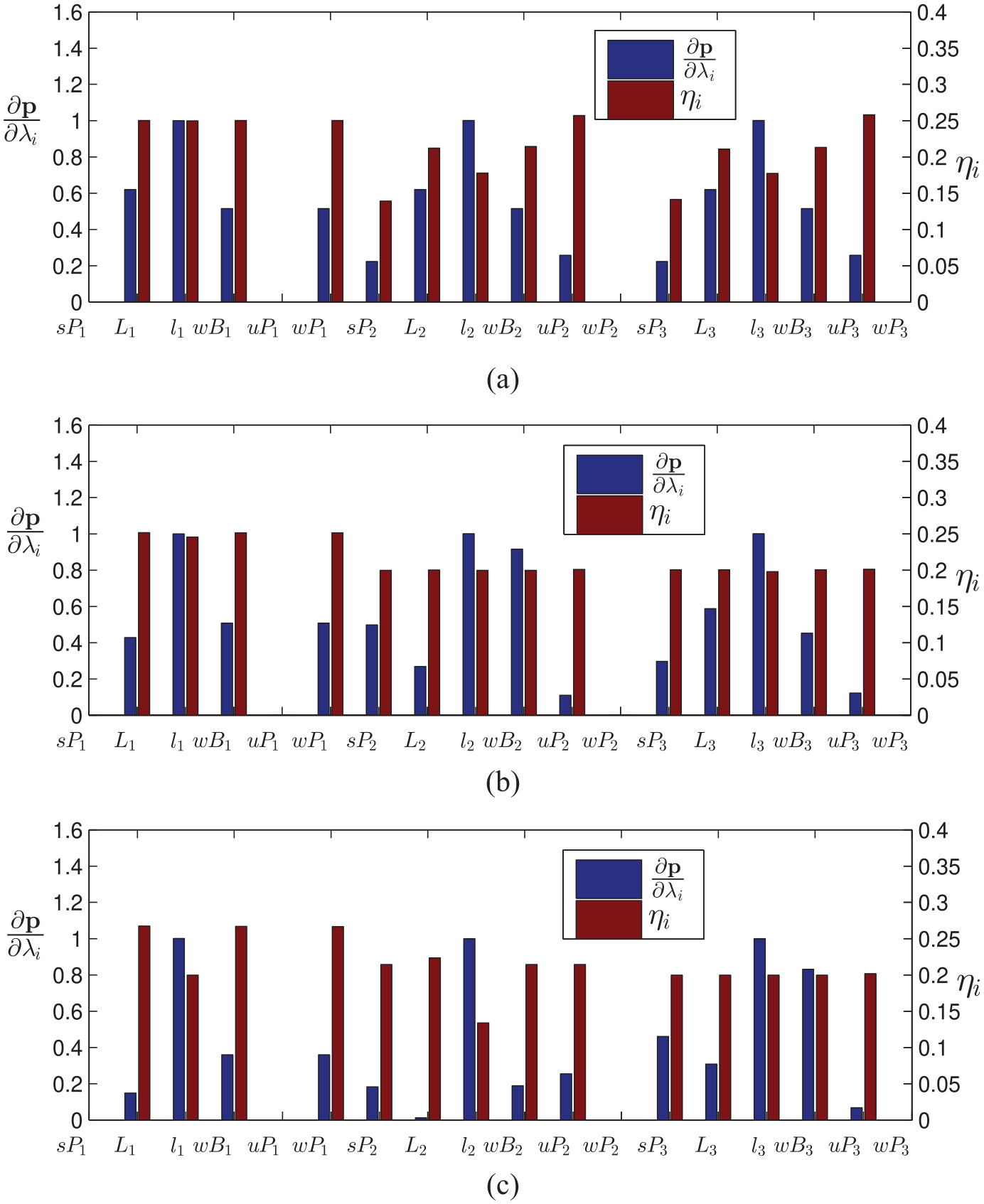
Sensitivity indices by using derivative-based local and interval sensitivity approaches: (a) at
For the comparative proposed, the dimensional tolerance of the geometric parameters was considered small regarding the numerical values of link lengths. The local method cannot evaluate large variations of input parameters within the kinematic models, such as variations of joint positions. For these cases, the interval sensitivity has a potential advantage over the local methods since it can include a wide variation of the inputs to the sensitivity computation.
Finally, the interval sensitivity is computed for the workspace trajectory that passes at the positions:
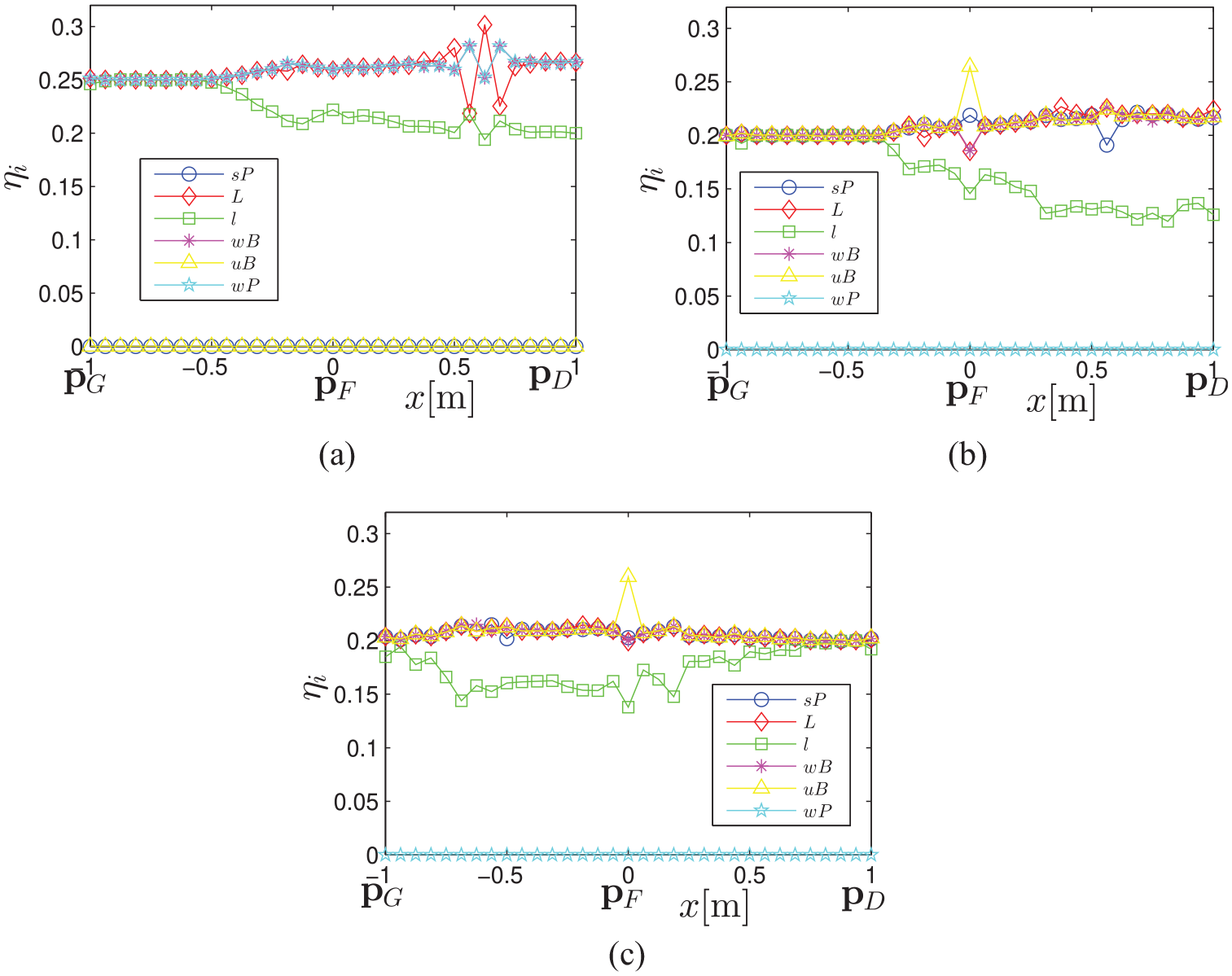
Interval sensitivity indices for every kinematic chain: (a) chain j = 1, (b) chain j = 2, and (c) chain j = 3.
As a benefit, the interval sensitivity approach permits the assessment of the effect of the interval tolerances of geometric parameters on the positioning error of the end-effector differently from the derivative-based method that quantifies the local sensitivity.
Fuzzy-interval assessment of the workspace size
This case study assesses how the fuzzy geometric parameters affect the workspace size by using the fuzzy interval definition and solving the interval sensitivity analysis. Therefore, the workspace size sensitivity against the variation of the geometric parameters modeled as fuzzy-intervals is evaluated. This sensitivity analysis evaluates how every geometric parameter defined within a maximum limit and a minimum limit influences the workspace size.
The Cartesian parallel manipulator is showed in Figure 13. The manipulator is composed of three symmetric kinematic chains; that is, the first and second link lengths (
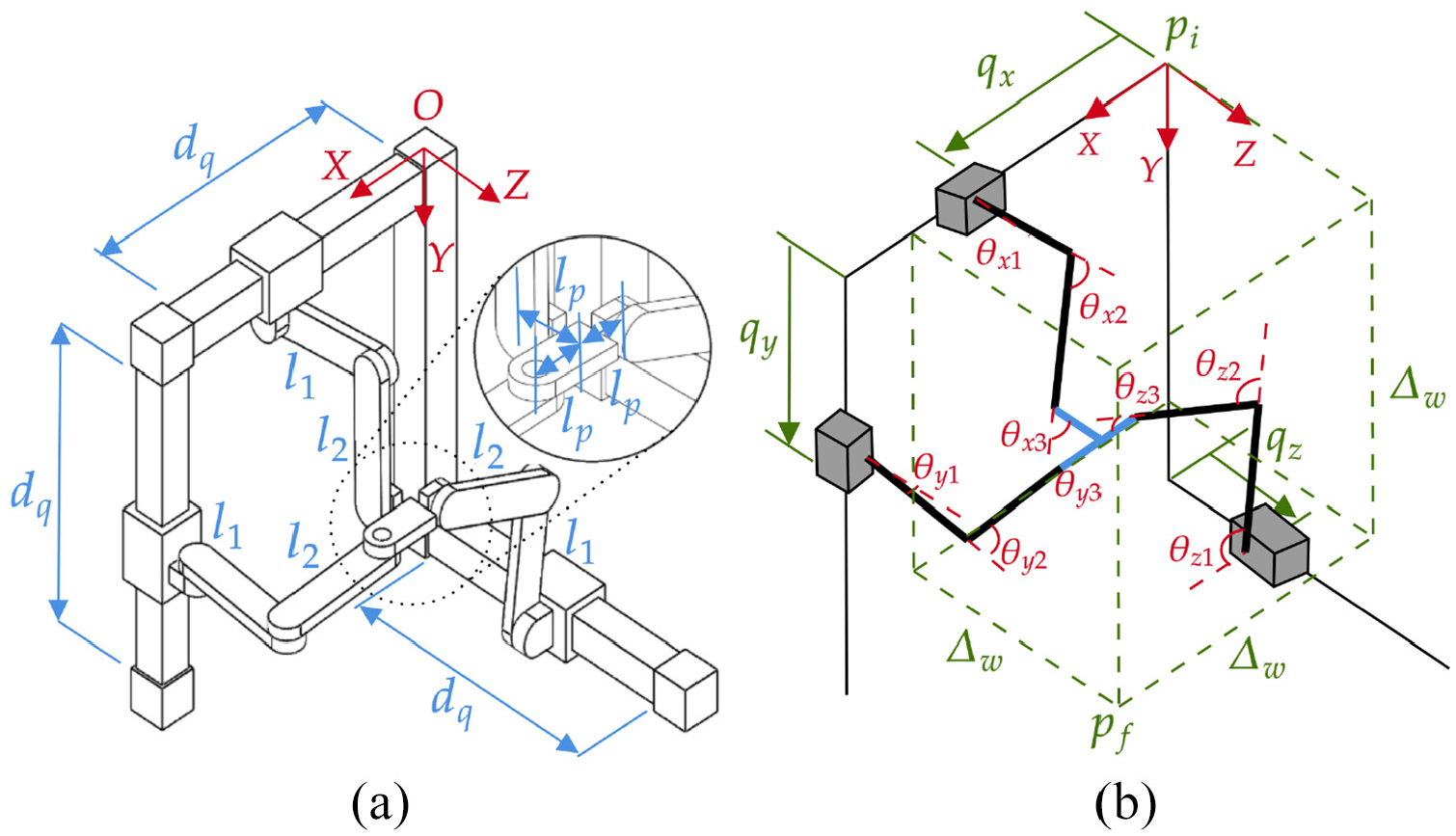
Cartesian Parallel Manipulator (CPM): (a) CAD model and design variables and (b) kinematic chains and workspace.
The geometry of the manipulator can be defined by four parameters: the link lengths of every kinematic chain

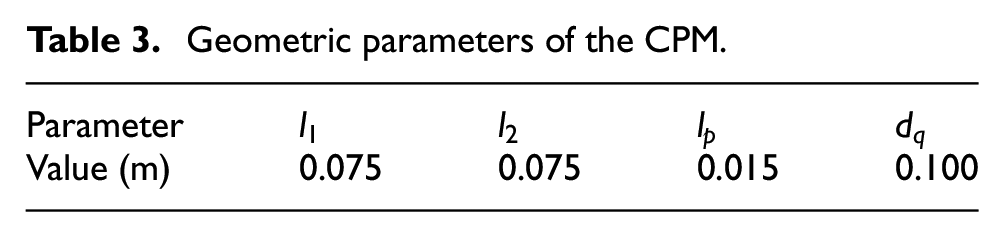
An initial definition of the geometric parameters of the Cartesian parallel manipulator is presented in Table 3. This definition was adopted to illustrate the CAD model of Figure 13(a).
Geometric parameters of the CPM.
Flowchart to determine the workspace size
The kinematic chain’s symmetry (see Figure 13(b)) makes the workspace shape, w, to be a cube with

The flowchart of Figure 14 determines the edge length
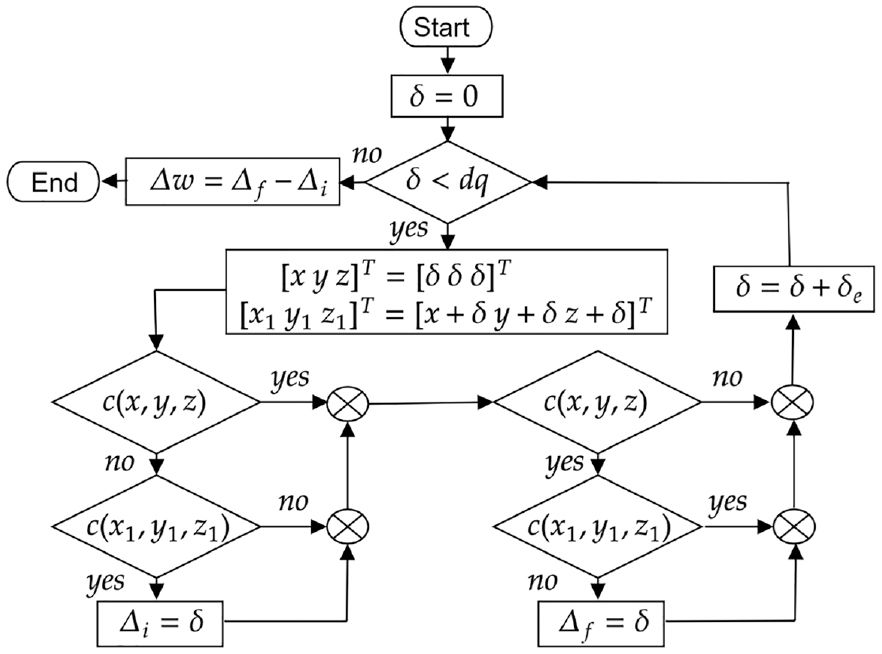
Flowchart to determine the workspace size
The bounds of the workspace are
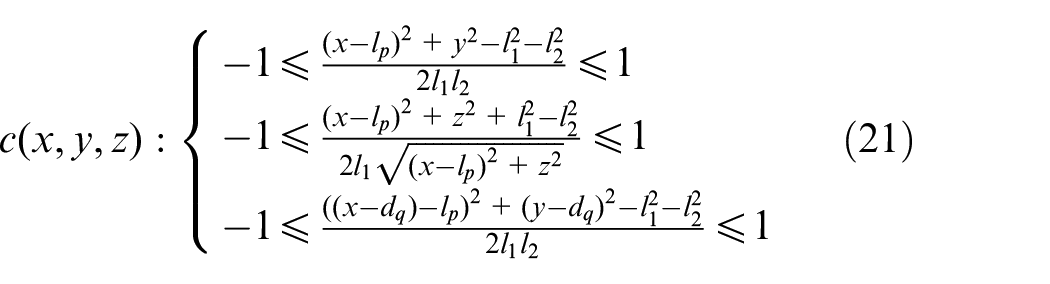
This statement ensures a feasible solution to the kinematic chain’s inverse kinematics within the workspace.
Application of the interval sensitivity analysis
This analysis aims to determine the geometric parameters’ effect on the workspace size. Every geometric parameter of the vector
For the present analysis, the numerical model corresponds to the workspace size according to the definition of equation (3) and the flowchart to compute the dimension of the cuboid
Results and analysis
As a previous analysis, before the sensitivity analysis, the workspace size defined by
It is worth to mention that this interval definition of the geometric parameters can be assumed as the design space, that is, a search domain in which the workspace size can be maximized. Consequently, two design spaces are considered that were selected to evaluate the variation of parameters around the numerical values of Table 3,
The results of Figure 15 show that for
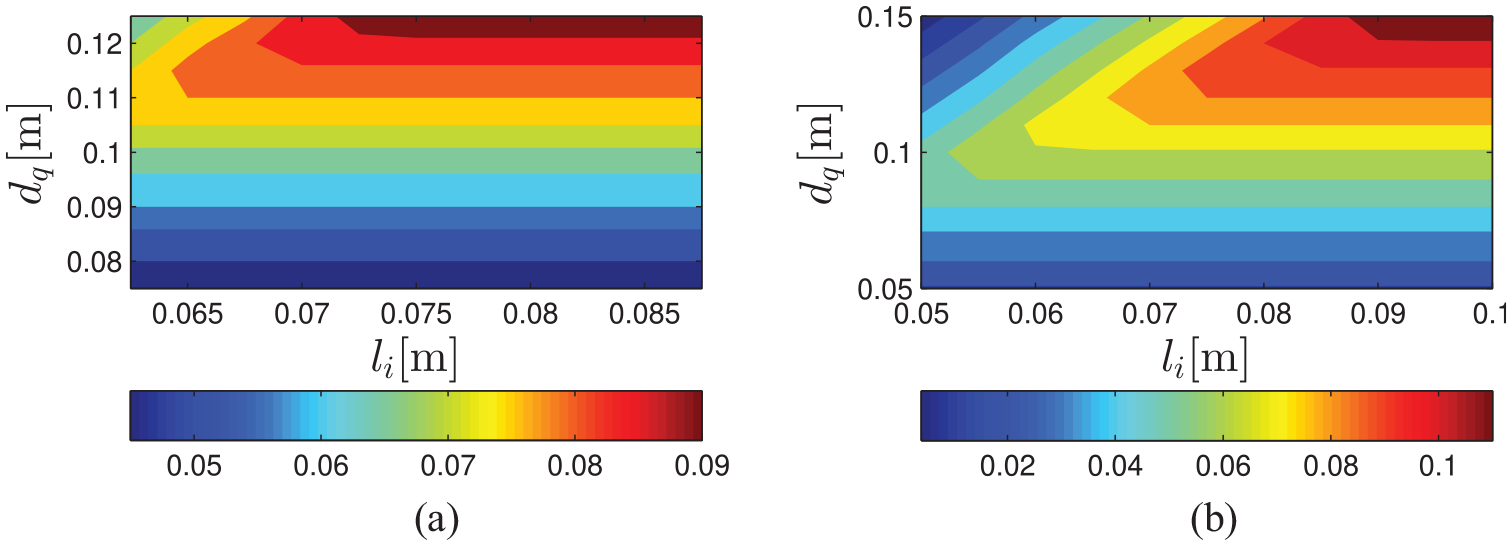
Evaluation of the simplified design space of the workspace size (
The four fuzzy. Figure 16 shows the interval sensitivity indices of four different cases in Table 4. Case 1 shows that the sensitivity of the four geometric parameters is equivalent (see Figure 16(a)); nevertheless, the interval workspace output
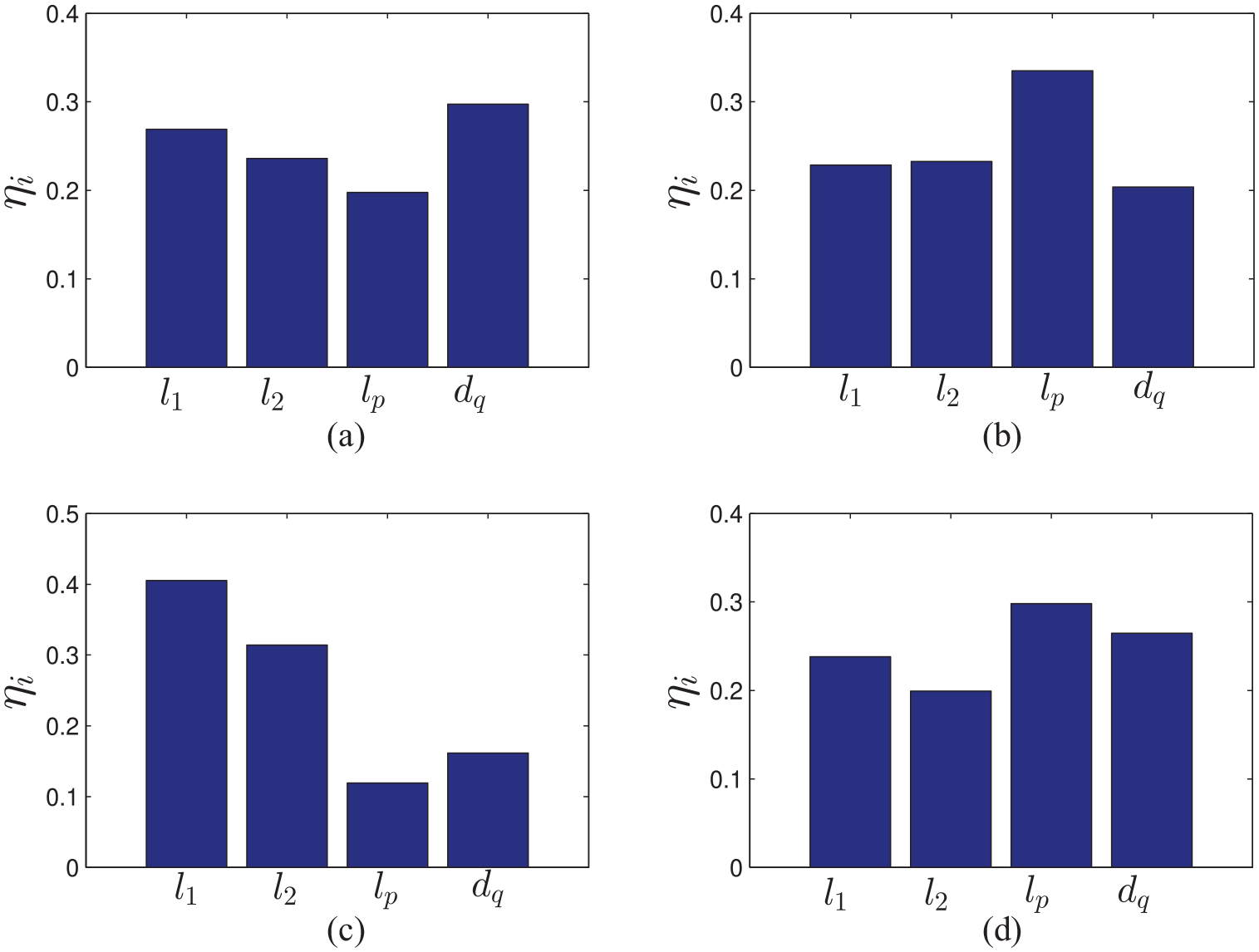
Sensitivity indices of the workspace size (
Sensitivity outputs for the corresponding

The definition of the search space of case 3 increases the maximum workspace; nevertheless, the sensitivity of the parameters is not equivalent (see Figure 16(c)). These specific conditions imply that the interval
The case 4 (see Figure 16(d)) shows a satisfactory definition of the search space. The workspace size attaints the maximum value among the cases analyzed, and the sensitivity of the interval parameters are equalized. This condition indicates that the interval parameters have the same relative influence on the workspace size.
Finally, the workspace size optimization is carried out based on the design space considered in the four cases of Table 4. The optimization problem definition is given by:

The optimal design variables derived from the optimization solution
Results of the Cartesian parallel manipulator (CPM) optimization.
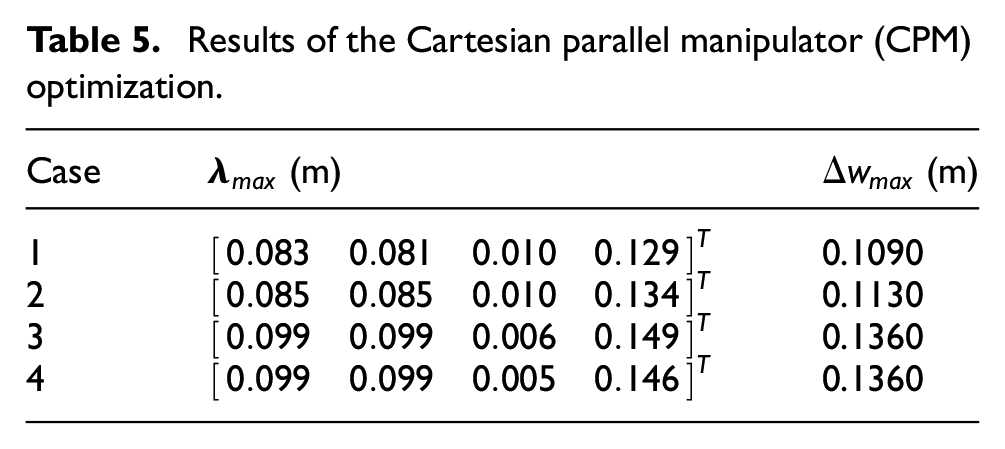
The four fuzzy input parameters of equation (3) are considered as intervals weighted by their respective
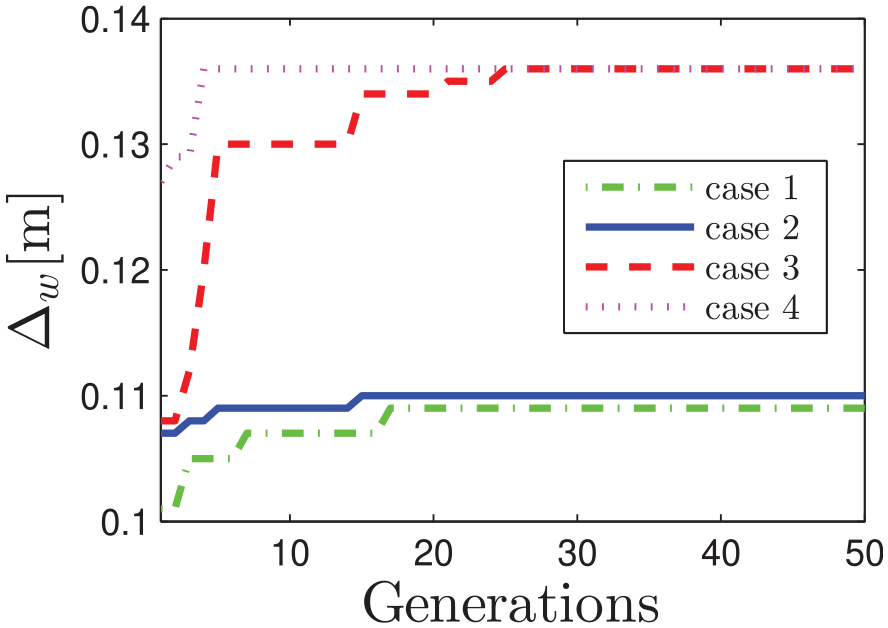
Optimization results.
It observed that the main benefit of the proposed approach is to improve the optimal design by evaluating the influence of the search space sensitivity on the optimal solution. For this case study, the sensitivity analysis permitted to improve the optimal solution by evaluating the sensitivity of several interval inputs that correspond to the search space of the optimization. The best optimal design was obtained by defining an equivalent sensitivity of the design variables over the search space.
Conclusion
This contribution presented an approach based on the fuzzy-interval analysis to assess how dimensional tolerances modeled as fuzzy variables affect the performance of parallel manipulators. In addition, the sensitivity analysis based on interval analysis permitted computing sensitivity indices by comparing the interval inputs and outputs. Initially, the positioning error of a 5R parallel manipulator was analyzed. The second case study illustrated the geometric parameters sensitivity on the end-effector positioning of a Delta manipulator. The third case study considered the Cartesian parallel manipulator to evaluate the design space aiming at maximizing the workspace size.
The proposed fuzzy-interval analysis showed to be a complementary procedure in the optimal design applied on parallel manipulators. The fuzzy-interval approach permitted to model the dimensional tolerance as intervals weighted by the membership function; thus, different scenarios can be obtained to assess the impact of these dimensional tolerances on the analyzed kinematic output variation. Moreover, the interval approach permitted to compute the input parameters sensitivity modeled as intervals, that is, the sensitivity is computed not only for a single input but for a range of input models as intervals. Moreover, the interval sensitivity demonstrated to be useful to determine the influence or sensitivity of every design variable on a given design criterion to be optimized. For example, in some cases, the design criterion was not sensitive or this sensitivity was low to a design variable. Therefore, this design variable can be removed from the design space to enhance the optimization procedure.
Future work will analyze of performance indices of manipulators, such as dexterity or manipulability and, the results will be verified through experiments. Moreover, the fuzzy-interval analysis of dynamic performance to include these methodologies in the optimization and control of manipulators.
Footnotes
Appendix A
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors are thankful for the financial support provided by CNPq (Process 427204/2018-6), and CAPES.