
Abstract
Due to the exist of the inevitable dimensional tolerance and assembling errors in the ball bearing, the interference amounts between the inner ring and the connected shaft are uncertain but bounded, which could directly affect the dynamics performance of the rotor-ball bearing system. Whereas, most of the works on the field of dynamics in a ball bearing have considered the varying compliance (VC) vibration as deterministic vibration and there are few quantitative studies considering the uncertain factors. Therefore, in this paper, an uncertain ball bearing-rotor dynamic model is presented based on the Chebyshev interval method. Firstly, the uncertain interference amounts between the bearing inner ring and the connected shaft are modeled by the Chebyshev interval method. Then the radial clearance and actual interference amounts of ball bearing are derived by the bearing-shaft interference fit model. The time-dependent ball-raceway contact probability is formulated and the influence of the average and deviation coefficient of the initial interference amounts on the vibration behaviors of the rotor under various rotational speeds are investigated based on the double degrees of freedom (2-DOF) ball bearing system. The numerical cases show that the amounts of the bearing-shaft interference fit are uncertain and could be affected by rotational speed, which have an obvious influence on the dynamic performance of the rotor-ball bearing system. Reasonable design of the interference amounts could reduce the dispersion of the displacement and time-varying stiffness. The numerical results obtained by the present study are compared to the Monte Carlo simulation (MCS), which show the validity of the study.
Keywords
Introduction
With the increasing requirements for the high performance equipment, ball bearings are designed tends to high precision and high speed. As the dynamic response of the ball bearing system is greatly sensitive to the deviation of the ball bearing parameters, the dynamic performance prediction and parameters optimization of the ball bearing system have always been the focus of researchers.
Radial clearance is one of the most sensitive parameters of ball bearing, which could introduce very strong non-linearity. Researchers have done a lot of works on the modeling of the contact characteristic of the ball bearing with radial clearance. Sunnersjö 1 proposed the so-called varying compliance vibration in a ball bearing subjected to radial load with a positive radial clearance, which are considered as the most essential reason of noise and unstable motion of ball bearings that occur not involved in the accuracy class of the ball bearing. Fukata et al. 2 studied the radial vibrations of the ball bearing with the help of computer simulation and gave the wave forms of the VC vibration response due to the nonlinear spring and time-dependent excitation of ball bearings. Tiwari et al. 3 studied the vibration behaviors of a balanced and horizontal rigid fault-free rotor-ball bearing system and concluded that the decrease of radial clearance could increase the linearity of the system. Considering the influence of bearing clearance on the nonlinearity of the system, Kappaganthu and Nataraj 4 presented the ball bearing system without the assumption of the collinear characteristic between the inner and outer rings. Villa et al.5–8 analyzed the influence of radial bearing clearance, rotor unbalanced, and the number of loaded rolling body on the nonlinear vibration of the ball bearing system. Based on the 2-DOF rotor-ball bearing system, Zhang et al.9,10 studied the nonlinear behaviors due to the nonlinear Hertz contact and the bearing internal gap by harmonic balanced method with AFT technology. Haslam et al. 11 presented a Jeffcott rotor supported by the two identical bearings and parameters analysis was performed according to the generalized harmonic balance method, which illustrated that the bearing internal gap has the largest effect on the vibration characteristic and should be the largest source of nonlinearity. In addition, accurate calculation of bearing stiffness under nonlinear factors, such as the fractional power contact and the clearance is of vital significance to the development of the ball bearing. In terms of the quasi-static model of the bearing, Lim and Singh 12 developed the comprehensive ball bearing stiffness model by the basic principles, in which all possible degrees of freedom are included. As the constant changes of the position of rolling balls, which could make the bearing stiffness as time-dependent because of the VC vibration, Liew and Lim 13 proposed the time-varying bearing stiffness model based on Lim’s stiffness model. Considering the ball’s centrifugal effect and the gyro moment, further extension of bearing time-varying stiffness model was presented by Liu and Zhang 14 based on the Liew and Sheng’s 15 works. Zhang et al.16–18 proposed the time-dependent stiffness with explicitly expressions in consideration of the rotor’s unbalanced force and time-dependent loaded zone of the ball bearing. Gupta 19 regarded the bearing stiffness as response of vibration displacement at each time step of integration and performed the parameters research to analyze the influence of shaft flexibility, rotor speed, and bearing gap on the transient and mean of the time-dependent ball bearing stiffness. Zhang et al. 20 investigated the effect of preload modes on the ball bearing stiffness and the effect of shaft-bearing interference was included. Harsha et al. 21 presented a bearing model to investigate the nonlinear vibration response of the rotor-ball bearing system considering the effect of variation of the rolling balls diameters, the conclusions show that the deviation in ball diameter could induce high radial vibrations and the amplitudes of vibrations are closely related to the cage’s rotational speed. Based on the quasi-static model, Fang, Zhang, et al.22,23 investigated the influence of the variation of the radial clearance on the fluctuation of the varying compliance stiffness and the ball bearing fatigue life under different operating conditions. Ambrożkiewicz et al. 24 presented a sensitivity analysis method to determine the optimal radial clearance by monitoring the vibration responses of ball bearings at different speeds and radial clearances. In addition to the effect of the clearance, Liu et al. 25 presented the bearing lubrication coupled model including the dynamics model and lubrication model by considering the effect of the cage clearance and the lubrication. Furthermore, researchers have concluded that the rolling bearing components’ flexible deformation,26,27 manufacturing errors,28,29 local defect 30 can greatly affect the vibration characteristics of the ball bearing-shaft system.
It can be found from the previous works that the rotor’s motion will show rich and complex nonlinear behavior induced by the nonlinear factors in the rotor-bearing system. Therefore, the studies on nonlinear dynamic behavior caused by deterministic factors have theoretical guiding significance for the design of rotor-ball bearing system. However, the parameters employed in the studies listed above are deterministic. In actual, the physical dimensions in the ball bearing are uncertain. As stated previously, the compound influences caused by the uncertain physical dimensions were not fully considered in the analysis of VC vibration. Liu et al.31,32 investigated the stochastic vibration response and rotating reliability of the rotor-ball bearing system with uncertain radial clearance based on the stochastic models. However, it is difficult to obtain the distribution function and probability density function of random variables accurately. Actually, the physical dimensions of the ball bearing are uncertain but bounded, and the upper and lower boundary could be easily acquired compare to the random characteristics in engineering.
Recently, as a supplement to the stochastic model, the interval modeling has attracted much attention from researchers. Didier et al.33,34 determined the nonlinear response of the rotor system subjected to uncertain factors by employing the harmonic balance method combined with the polynomial chaos expansion method. Due to the over estimation defect of Taylor interval analysis, the Chebyshev interval analysis methods are widely used by the researchers,35,36 which calculates the responses of the original system at the sampling points and organizes a approximate model to predict the uncertain propagation results. Fu et al.37–41 have done a lot of in-depth research based on this method considering the different types of nonlinearities in rotor systems, such as unbalance force, support nonlinearities, rub-impact, and clearance. In addition, the literature review on rotor systems with uncertainty physical parameters is presented in Fu et al. 42 Xiang et al. 43 presented a parameter sensitivity analysis method to investigate the motion characteristics of the slider-crank mechanism with joint space based on the Chebyshev interval analysis method. Based on the interval method, Jin and Zhang 44 presented the reliability analysis model to calculate the dynamic reliability of the ball bearing-rotor system and explored the coupling effect between contemporaneous meta-action of the CNC. However, to the best of the authors’ knowledge, seldom studies are found to investigate the VC vibration of the ball bearing considering the uncertain effect of the bearing-shaft interference by the Chebyshev interval method. Thus, in this paper, the ball bearing-rotor dynamic model with uncertainty is presented in terms of the Chebyshev interval method and the influences induced by the uncertain bearing-shaft interference amounts on the vibration characteristic of the ball bearing are investigated. The results calculated at the expectation values based on the deterministic model are given for comparison. Other sections in the article are introduced as below: Section “Dynamics modeling of rotor-ball bearing system with uncertainty” illustrates the rotor-ball bearing model with uncertainty. The validation and numerical results are conducted in Section “Numerical results.” And the conclusions in the article are draw at last section.
Dynamics modeling of rotor-ball bearing system with uncertainty
Chebyshev interval analysis of the bearing-shaft interference amounts
In terms of the existence of the dimensional tolerance induced by the manufacturing accuracy and assembly errors in engineering practice, the physical dimensions of the rolling bearing and the connected shaft are uncertain. Thus, the bearing-shaft interference fit is uncertain, which should be fully considered in dynamic modeling of the ball bearing. Therefore, on the basis of the Chebyshev inclusion function, the interval analysis method is employed to approximate the nonlinear vibration response of the ball bearing induced by the uncertain bearing-shaft interference amounts ΔI. Brief introduction on the Chebyshev interval method35,36 will be given next.
The uncertain interference amounts ΔI is a closed interval which could be expressed by

The symbols ΔL and ΔU represent the two bounds of the interval variable Δ, respectively. The average interference amounts Δ0 could be written as

In order to describe the degree of the dispersion of the interference amounts, the variation coefficient β is defined as

where the parameters σΔ could be calculated as

Therefore, the interval variable could be written as

Without losing generality, the uncertain response F could be expressed as

where T is the Chebyshev polynomials and n is the desired order. ξ denotes the normalization of the uncertain interference amounts ΔI, which can be formulated as

The C(·) represents the Chebyshev orthogonal polynomial, and the recurrence form could be formulated as

The symbol fi represents the coefficient, which could be obtained by the Mehler intergral formula in terms of the orthogonality of the polynomials

The collocation point φj could be obtained by calculating the roots of the Chebyshev polynomial:

The variable ξ could be written as
Bearing-shaft interference fit model
In order to prevent the temperature rise induced by the relative motion in the connection of the bearing ring and shaft, interference fit should be recommended and a minimum certain interference amount must be ensured due to the centrifugal force. As shown in Figure 1, r1 and r2 denote the inner radii and outer radii of the shaft, r3 is the radius of the inner raceway. Compared with the diameter, the width and thickness of the inner ring are relatively small enough, thus the axisymmetric plane stress theory could be employed to construct the bearing-shaft assembly model 20 :

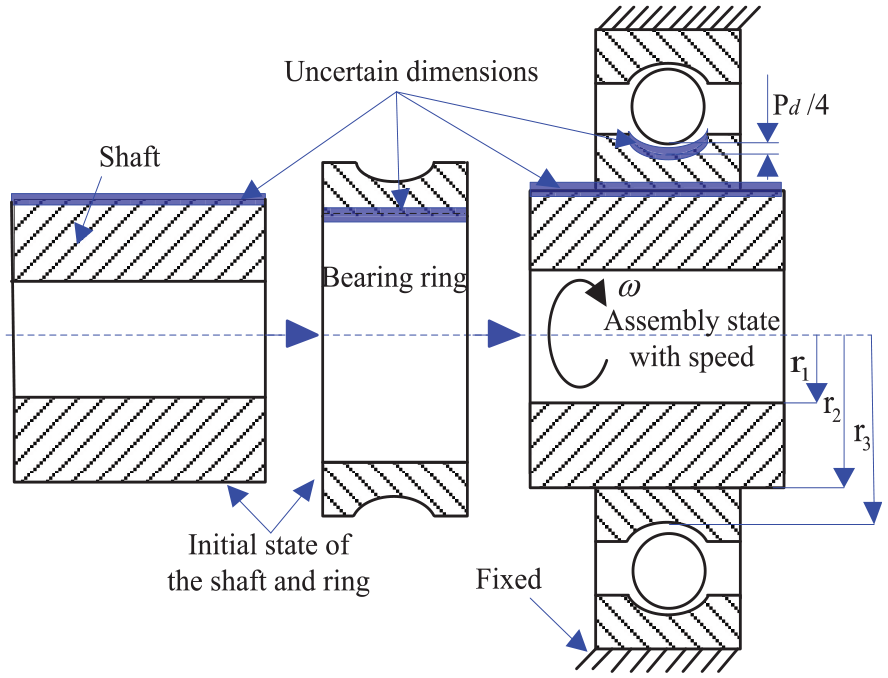
Bearing-shaft interference connection with uncertain interference amounts.
where σr is the stress in radial direction and σθ denotes the stress in tangential direction. ω is the rotating speed and ρ represents the density.
The elastic constitutive equations are formulated as below

where εr and εθ are the strain in radial and tangential direction. ν represents the Poisson’s ratio and E denotes the elastic modulus. The deformation equations can be written as

where s is the assembling deformation. Then the differential equation can be written as

The redial deformation of the bearing inner ring at positions r2 and r3 can be written as

where the elastic deformation coefficients C1 and C2 could be expressed as
The elastic deformation of the shaft at r2 can be obtained as:

where the deformation coefficients C3 and C4 could be expressed as:
Let assume that the initial interference amount is Δ0, then the actual interference value Δ could be written as

where Δω denotes the reduction of interference amount caused by the centrifugal force, which could be written as

The assembly pressure P1 could be written as
The radial displacement at position r3 is

The radial working clearance e could be formulated as

where Pd is the initial bearing radial clearance, which could be achieved by.

Rotor-bearing model
In terms of the classical 2-DOF rotor-ball bearing system1,2,9 shown in Figure 2, the motion equations of the rotor could be formulated as

where the restoring force

The classical 2-DOF rotor-ball bearing system. 9
The parameters m and C denote the equivalent mass and damping. g is the gravity constant,

The azimuthal angle of the jth ball

where

Thus, the ball passing period Tvc could be formulated

Thus the ball passage frequency could be obtained as fvc = 1/Tvc. The ball bearing dynamic stiffness can be derived as
where the Heaviside function H(·) could be expressed as

When the effects of uncertain physical parameters are taken into account, the equivalent contact deformation δj and the time-dependent ball-raceway contact state are uncertain. In order to quantify the uncertainty, the contact probability P is formulated based on the interval theory which can be expressed as
Where δjU and δjL denote the upper bound and lower bound of the deformation, respectively.
Numerical results
In order to illustrate the effectiveness of the calculation results, the published results are compared with those of the present paper. As shown in Figures 3 and 4. It can be seen that the present results are in a good agreement with the published results, which illustrate that the effectiveness of the bearing-shaft interference fit model and the rotor-bearing model.
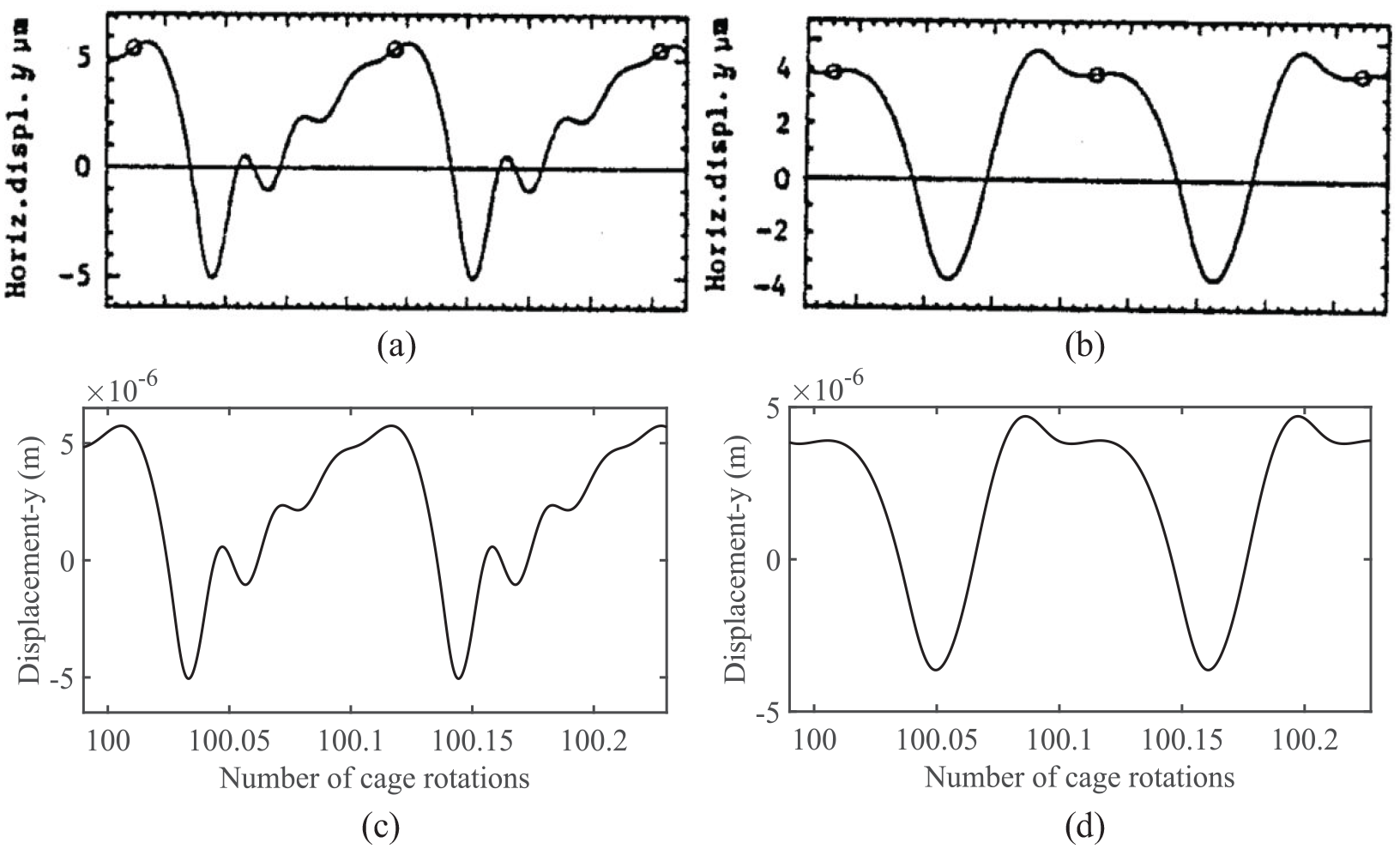
Comparison between the present results calculated by ODE45 and Fukata’s results 2 : (a) 450 r/min, Fukata’s results; (b) 1000 r/min, Fukata’s results; (c) 450 r/min, present results; and (d) 1000 r/min, present results.
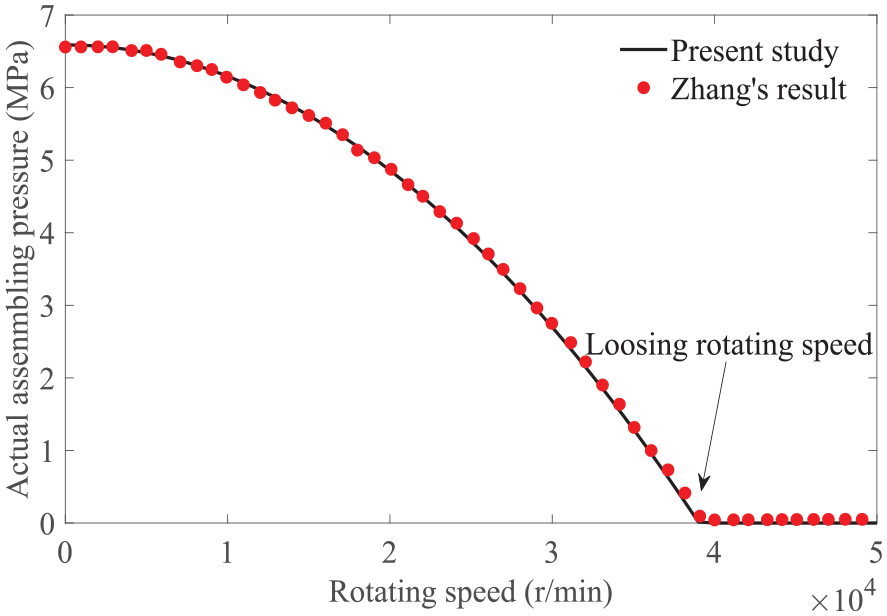
Comparison between the present results and Zhang’s results. 20
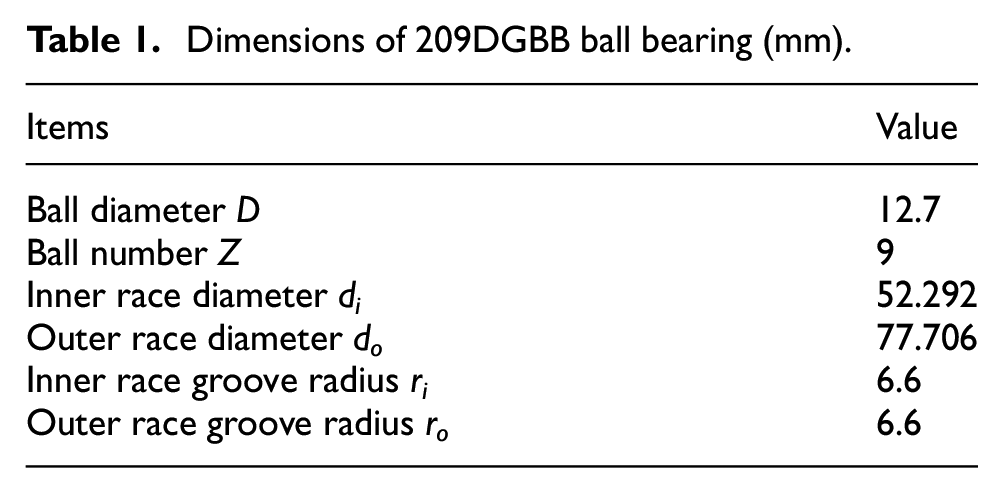
In order to verify the calculating accuracy of the present method, Monte Carlo simulation (MCS) is performed. The 209DGBB deep groove ball bearing is employed in this paper and the design physical dimensions are listed in Table 1.
Dimensions of 209DGBB ball bearing (mm).
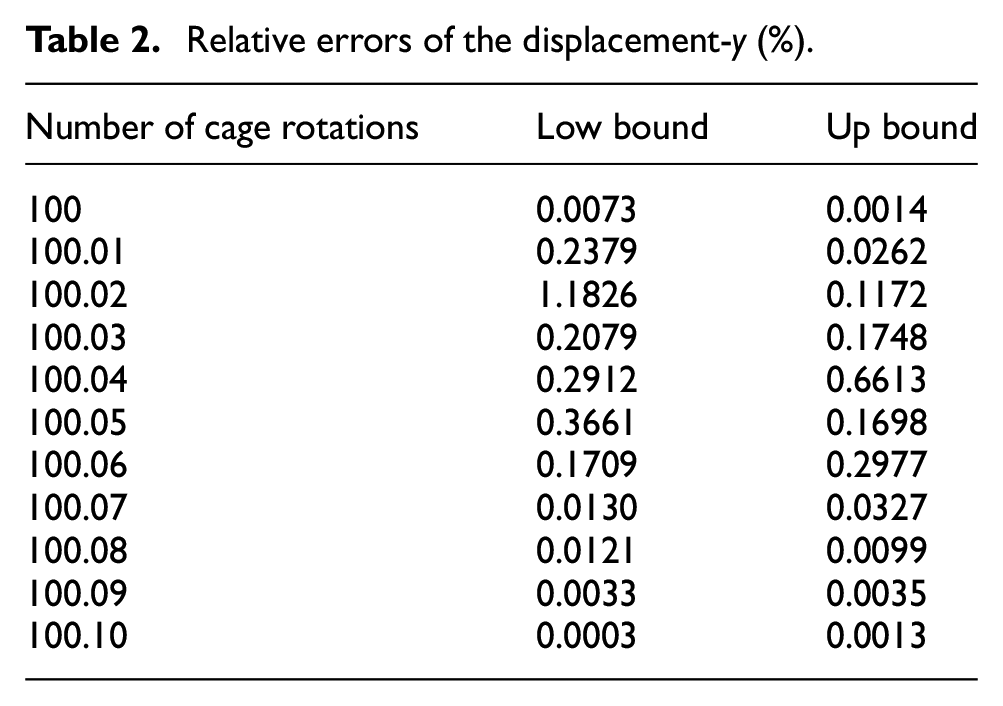
It is assumed that the rotor mass m = 0.6 kg and the speed is ωrotor = 1000 r/min. The damping coefficient C = 450 Ns/m. The average and variation coefficient of the initial amounts of the bearing-shaft interference are Δc = 10 μm and β = 0.03, respectively. Thus the two closed bounds of the actual initial amounts could be calculated. ODE45 in matlab is used and the uniform distribution is assumed when the MCS is performed. The comparison of the uncertain dynamic response bounds in y direction between the results calculated by the Chevbyshev method and the results calculated by MCS method are presented in Figure 5. One could see that the up bound and low bound calculated by the present method are in a good agreement with the results calculated by MCS method. Table 2 gives the relative errors of the displacement response at the specialized moment, which could quantitatively illustrate the accuracy of the present method.
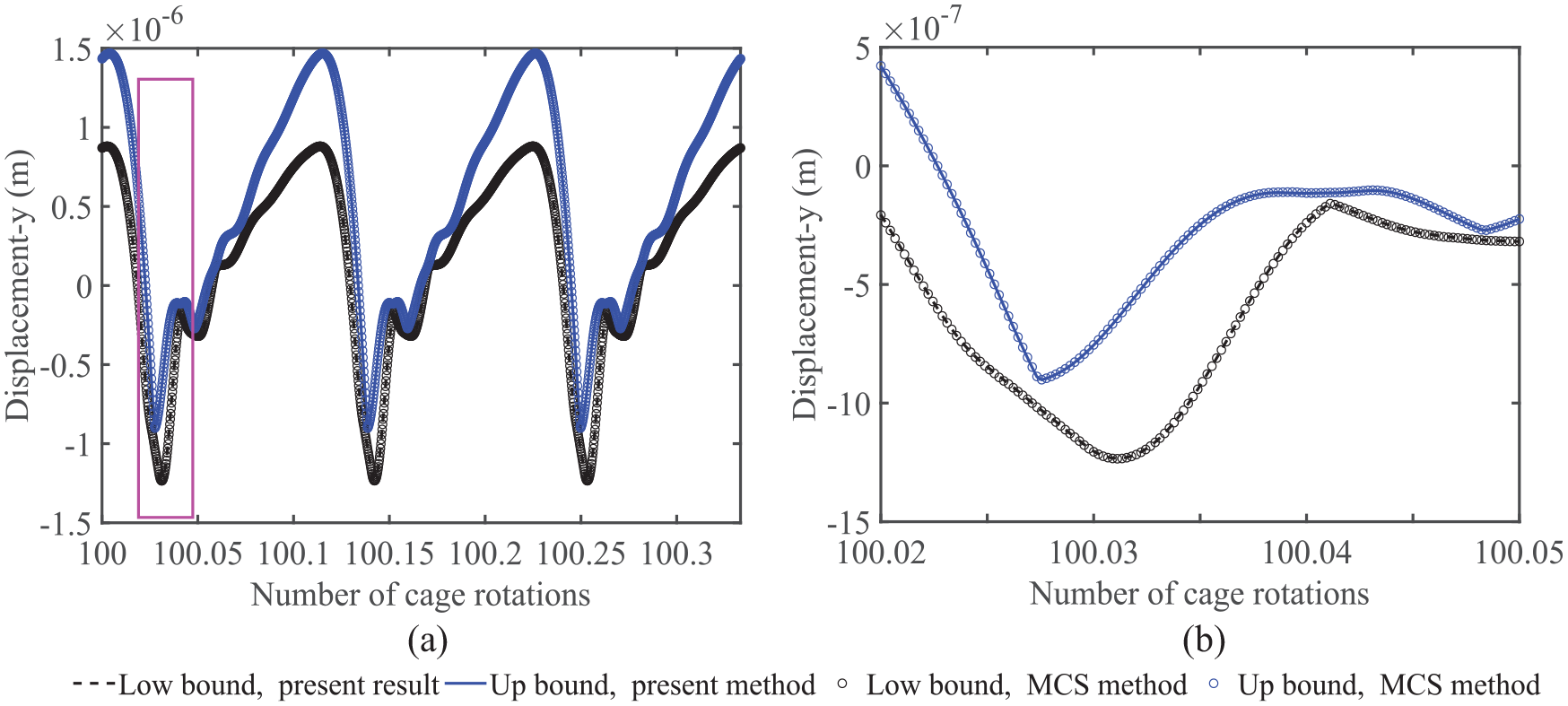
Comparison between the interval method and MCS when β = 0.03: (a) displacement in y direction and (b) enlarged view.
Relative errors of the displacement-y (%).
Effect of the average of the uncertain amount of initial interference
In engineering practice, interference fit is generally recommended to insure the reliability of the bearing-shaft connection, and different tolerance sizes and precision will produce different average interference amounts. Besides, the high speed centrifugal effect could change the assembly stress between the ring and the shaft, which could also affect the actual interference amounts. Thus, in order to investigate the influence of the average initial interference fit on the response of rotor-ball bearing system, two numerical cases for the deterministic model and uncertain model are conducted respectively.
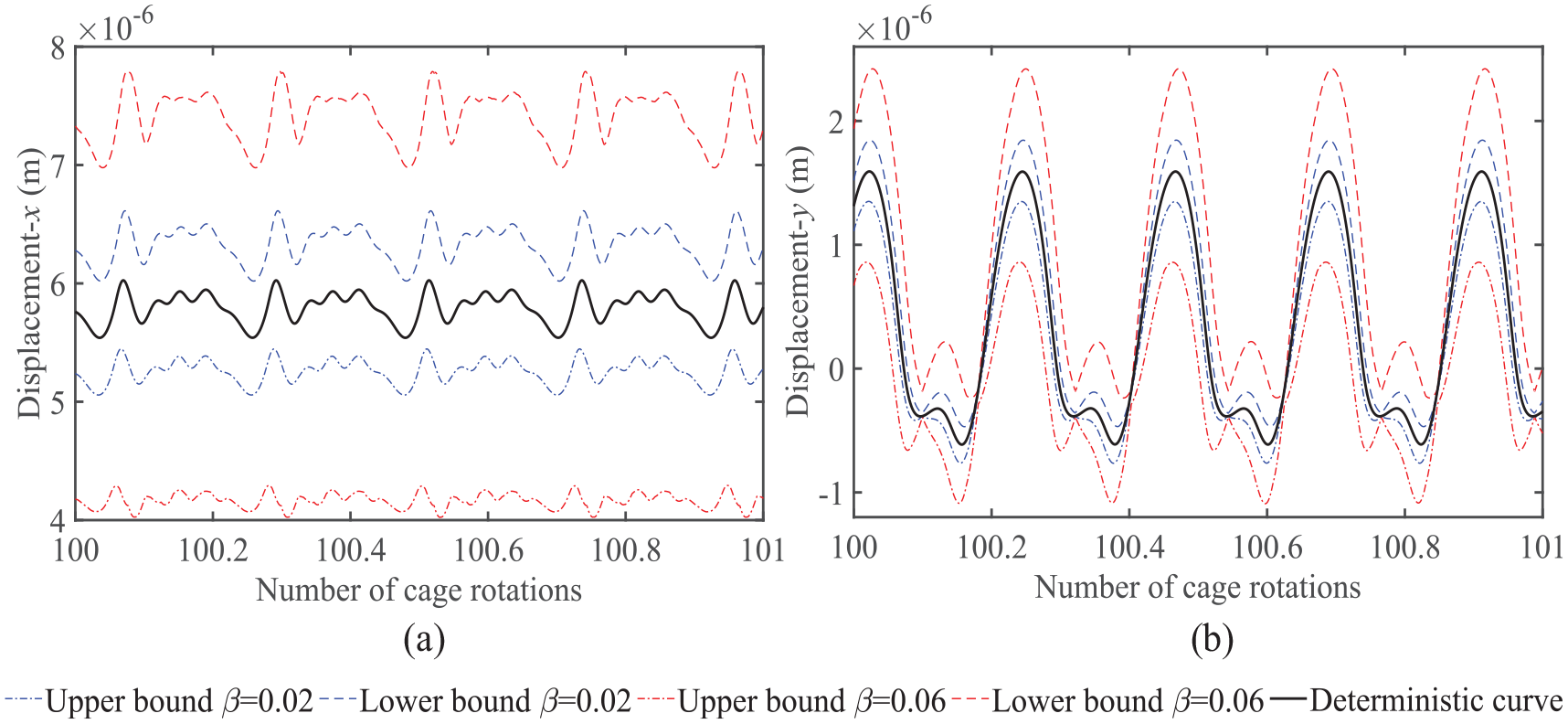
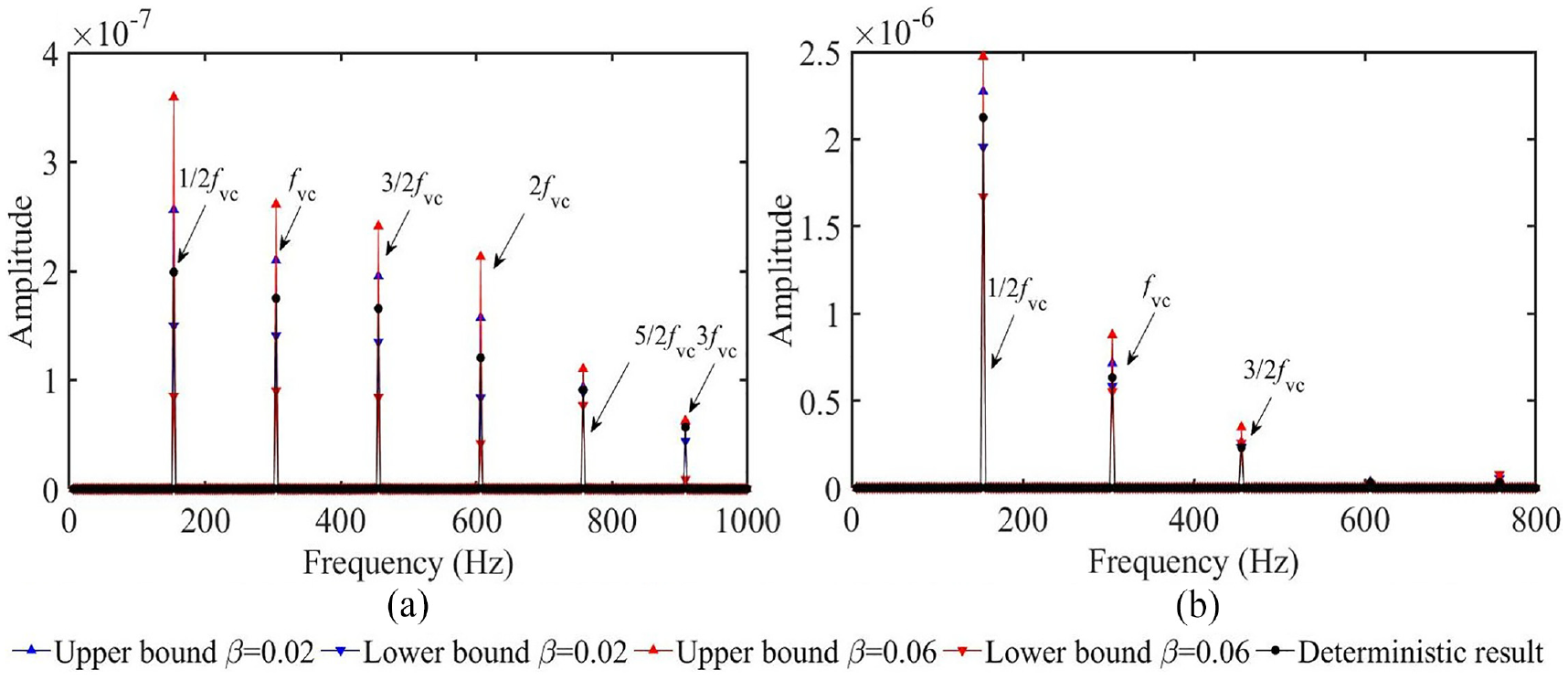
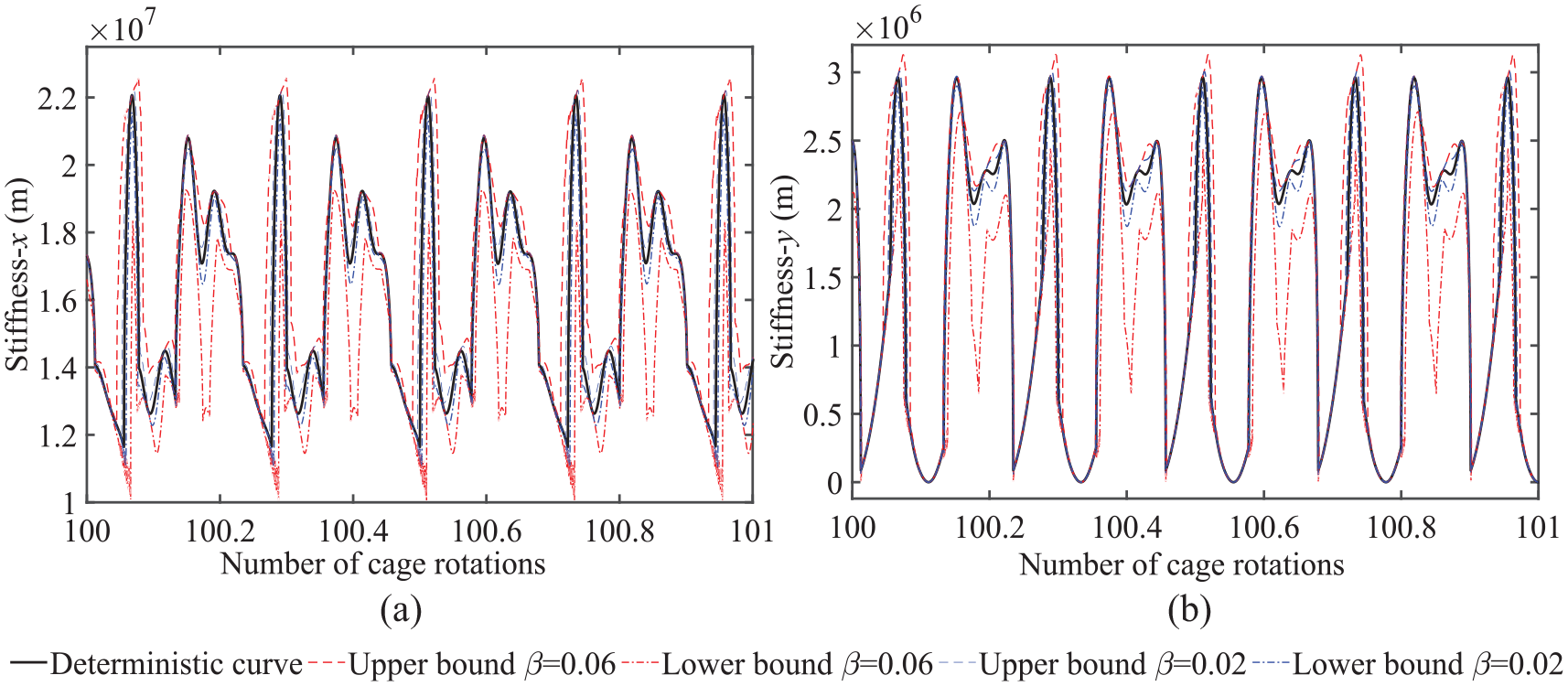
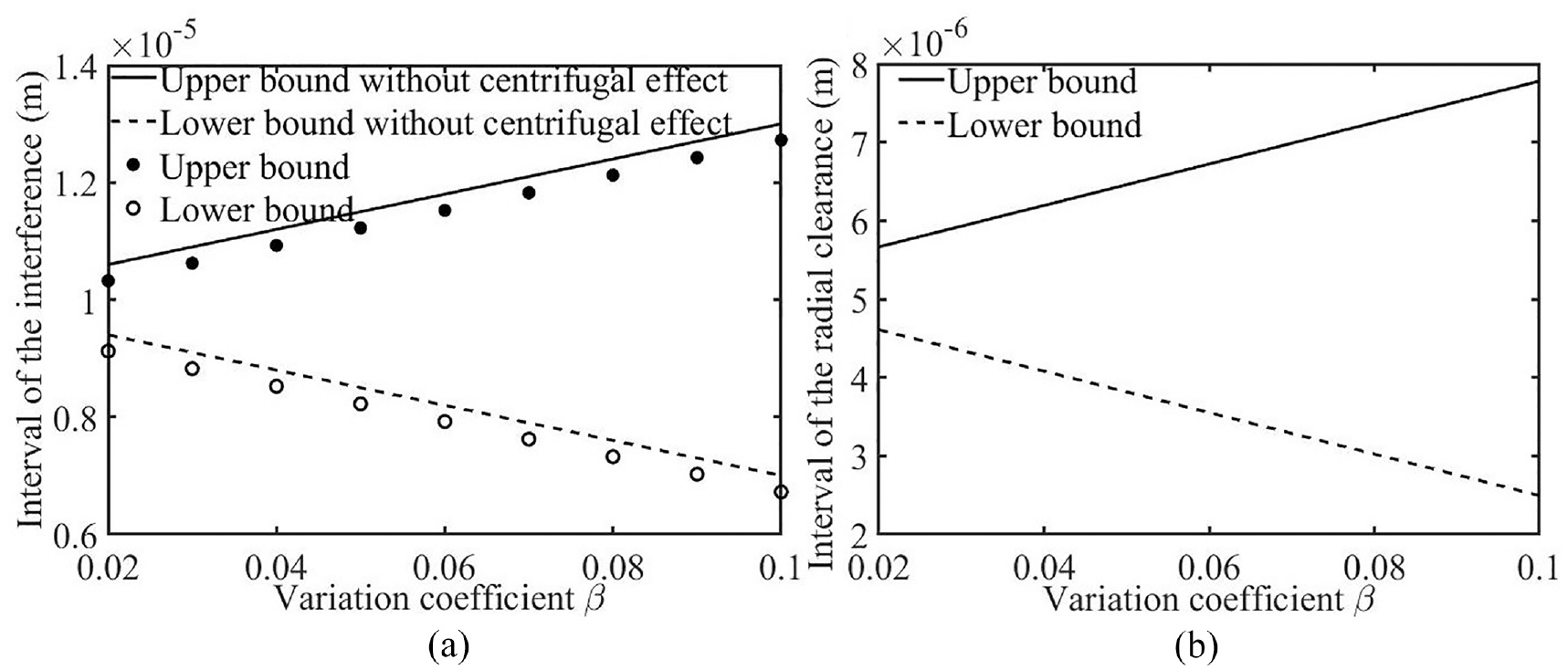
It is assumed that the rotating speed ωrotor = 1500 r/min, the initial value of the variation coefficient β = 0.05, the mean value of the initial interference fit Δ0 = 5 μm and 6 μm. The numerical results are depicted in Figures 6 to 12. It can be seen from Figures 6 to 8 show the comparison of the displacement, the spectrum, and the stiffness response under various mean value of initial interference Δ0, respectively. It can be seen that the deterministic curves under the designed initial interference values locate within the two boundary bounds calculated at the corresponding two initial interference. One can see that when the average initial interference increases, the two boundary curves of the displacement response decrease, whereas the interval of the displacement response increase slightly. The VC vibration induced by the periodical ball passage motion could produce frequency components, such as fvc and the multiple frequency. Figures 10 and 11 show the upper bounds, lower bounds, and deterministic results of peak-peak (P-P) values of the displacement and the stiffness versus the mean of initial interference. It can be seen that when the average initial bearing-shaft interference increases, the P-P values of the displacement and stiffness decrease but the uncertainty increase. Based on the results shown in Figure 9, which turn out the reason is that when the mean values of initial interference increased, the connection between the shaft and the bearing becomes tighter and the two boundary curves of the actual interference amounts will increase due to the constant variation coefficient. And the mean radial clearance decrease but the difference value of the envelope bounds of the radial clearance increase. Figure 12 illustrates the time-dependent contact probability with the initial interference Δ0 = 11 μm. It can be seen that due to the existence of the uncertain initial bearing-shaft interference amounts, the ball-raceway contact state is time-varying during a cage period and different balls will participate in carrying the load for each ball passage period. However, when the balls go out of the loaded zone or come into contact with the raceway, the ball-raceway contact states are uncertain.
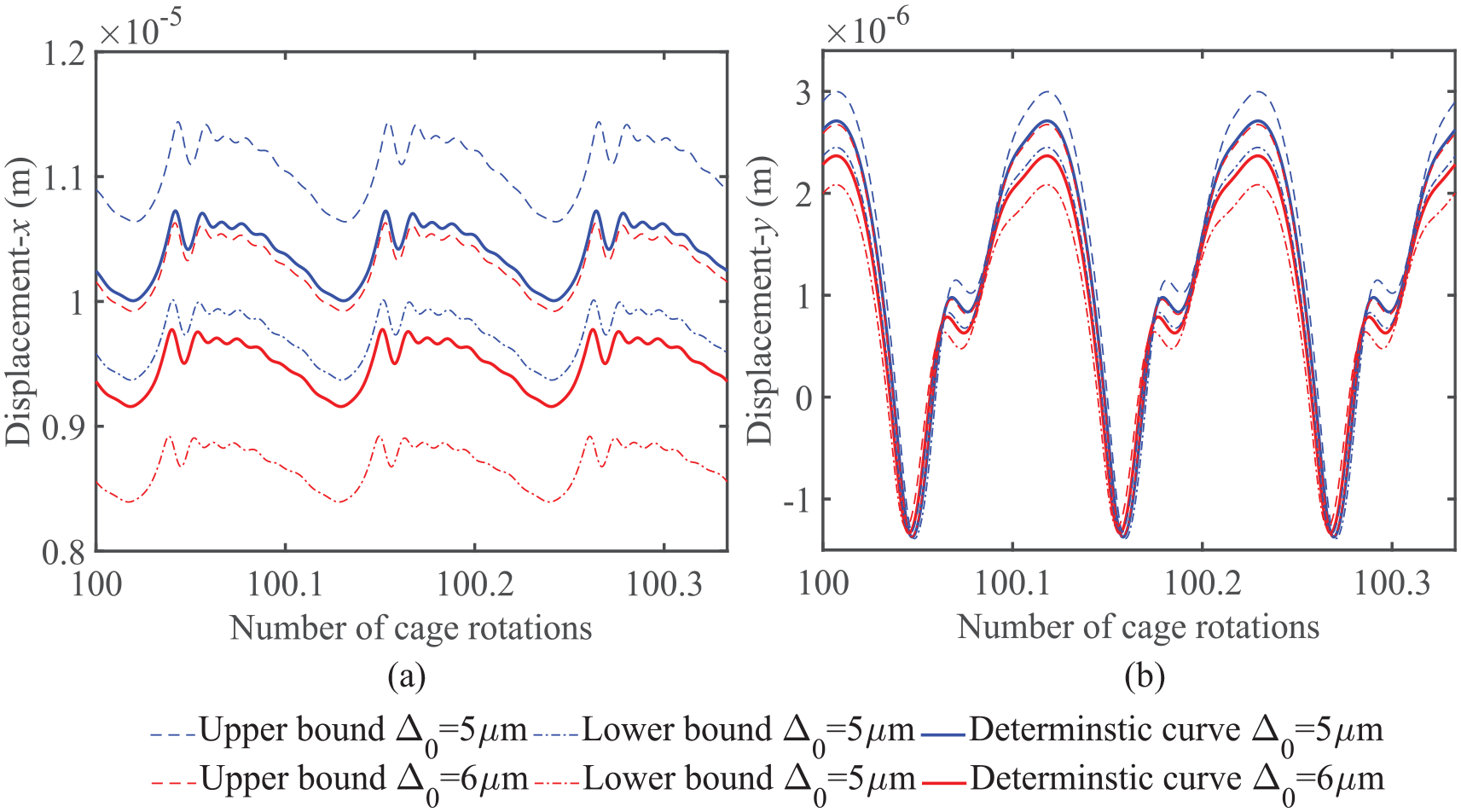
Comparison of the displacement response with different mean value of initial interference: (a) displacement of x direction and (b) displacement of y direction.
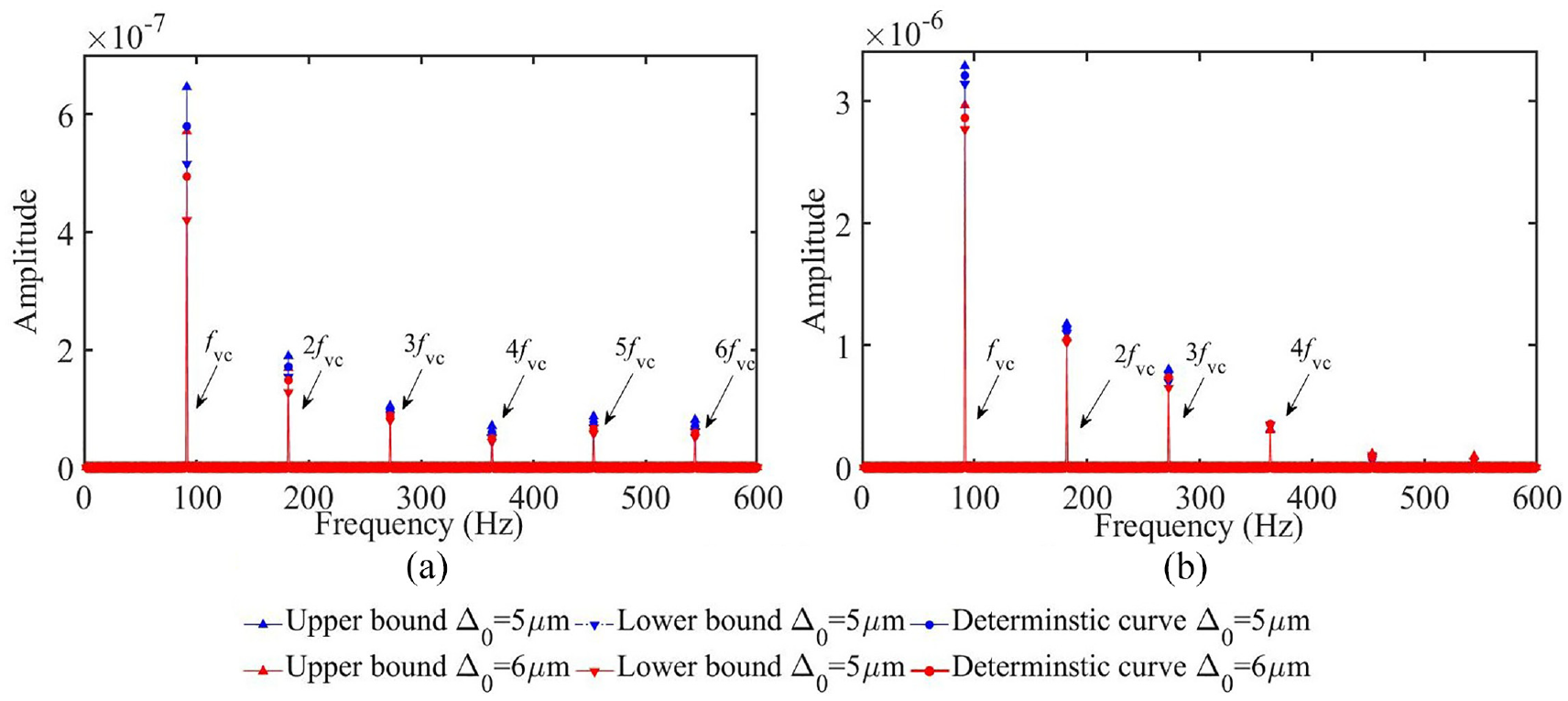
Comparison of the spectrum with different mean value of initial interference: (a) displacement of x direction and (b) displacement of y direction.
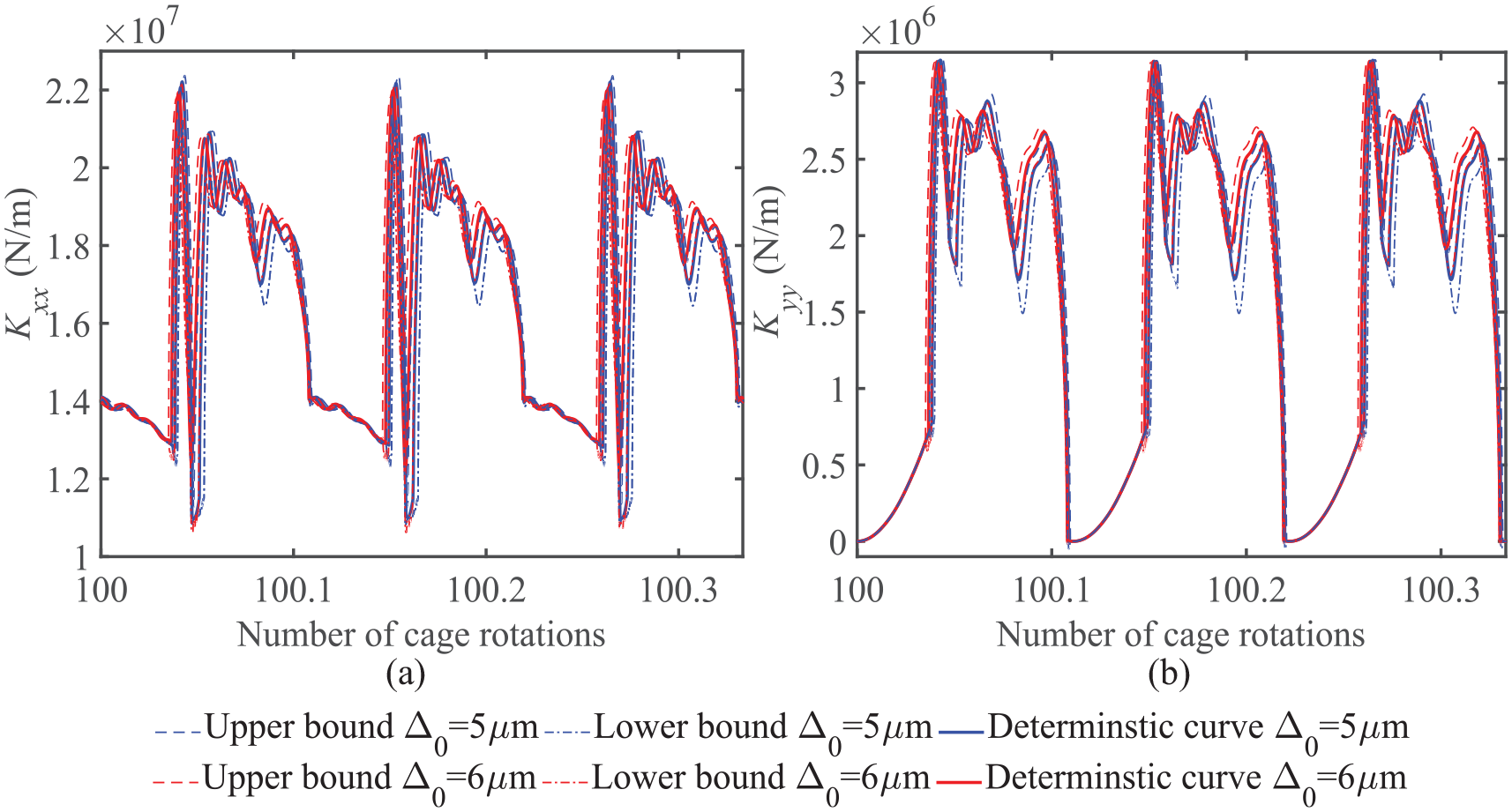
Comparison of the stiffness response with different mean value of initial interference: (a) displacement of x direction and (b) displacement of y direction.
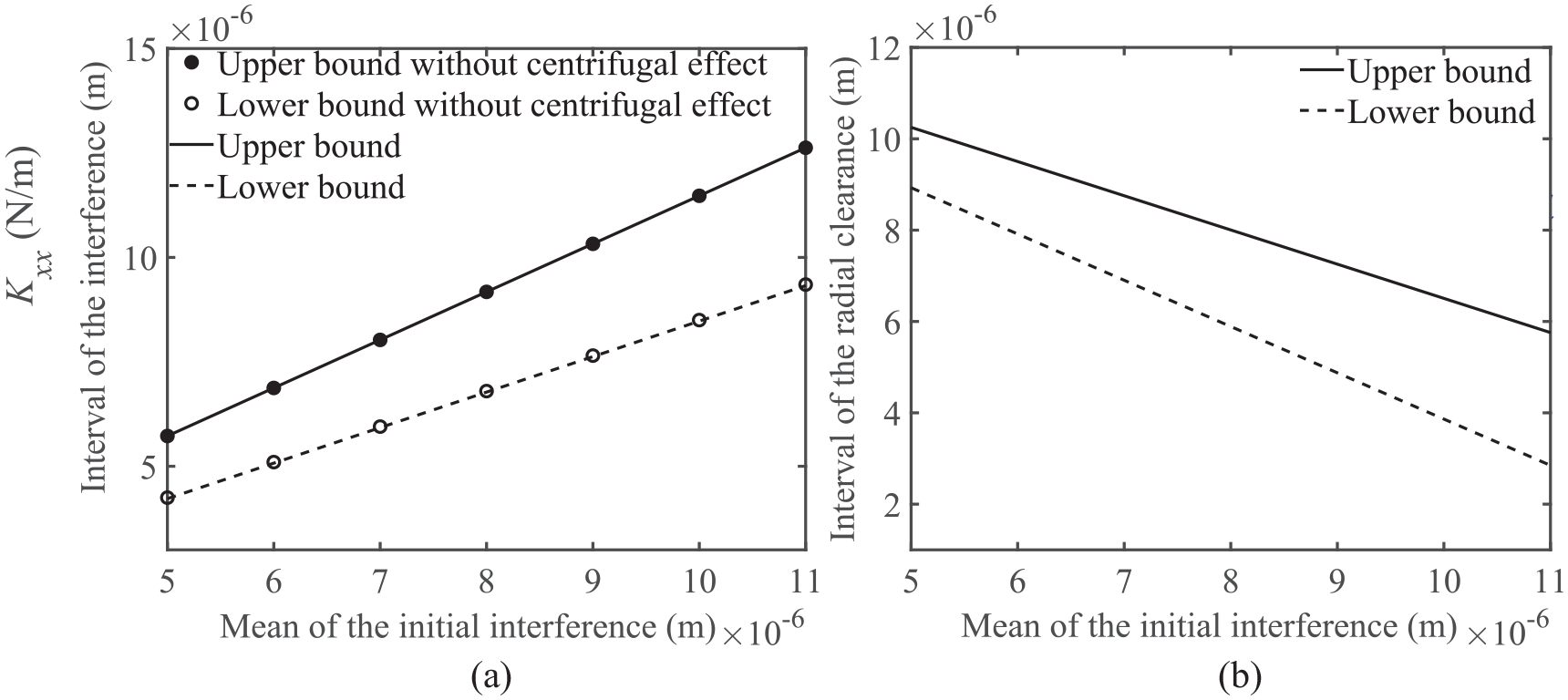
The two boundary curves versus the average initial interference: (a) uncertain interference value and (b) uncertain radial clearance.
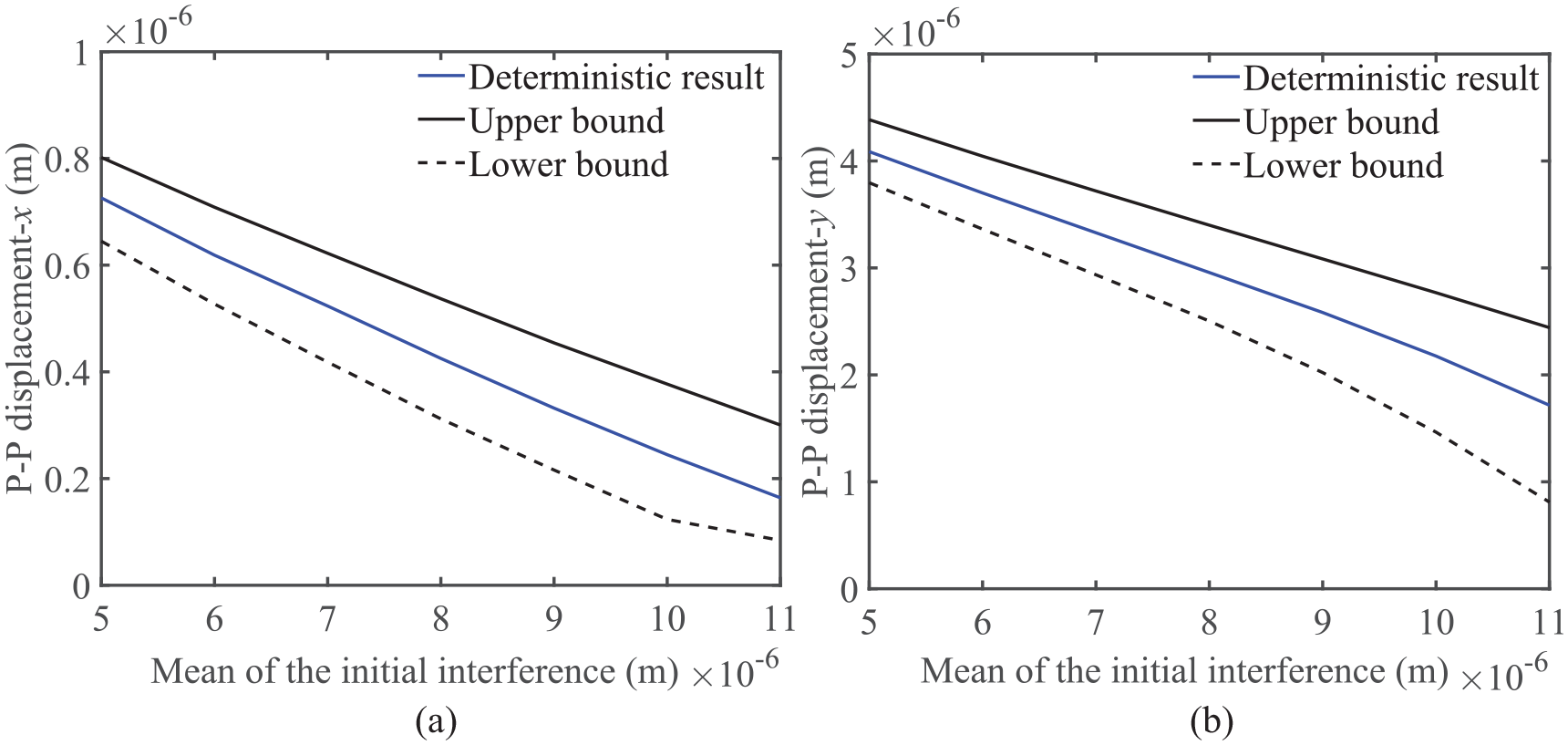
The two boundary curves and deterministic result of the P-P displacement versus the average initial interference: (a) x-direction and (b) y-direction.
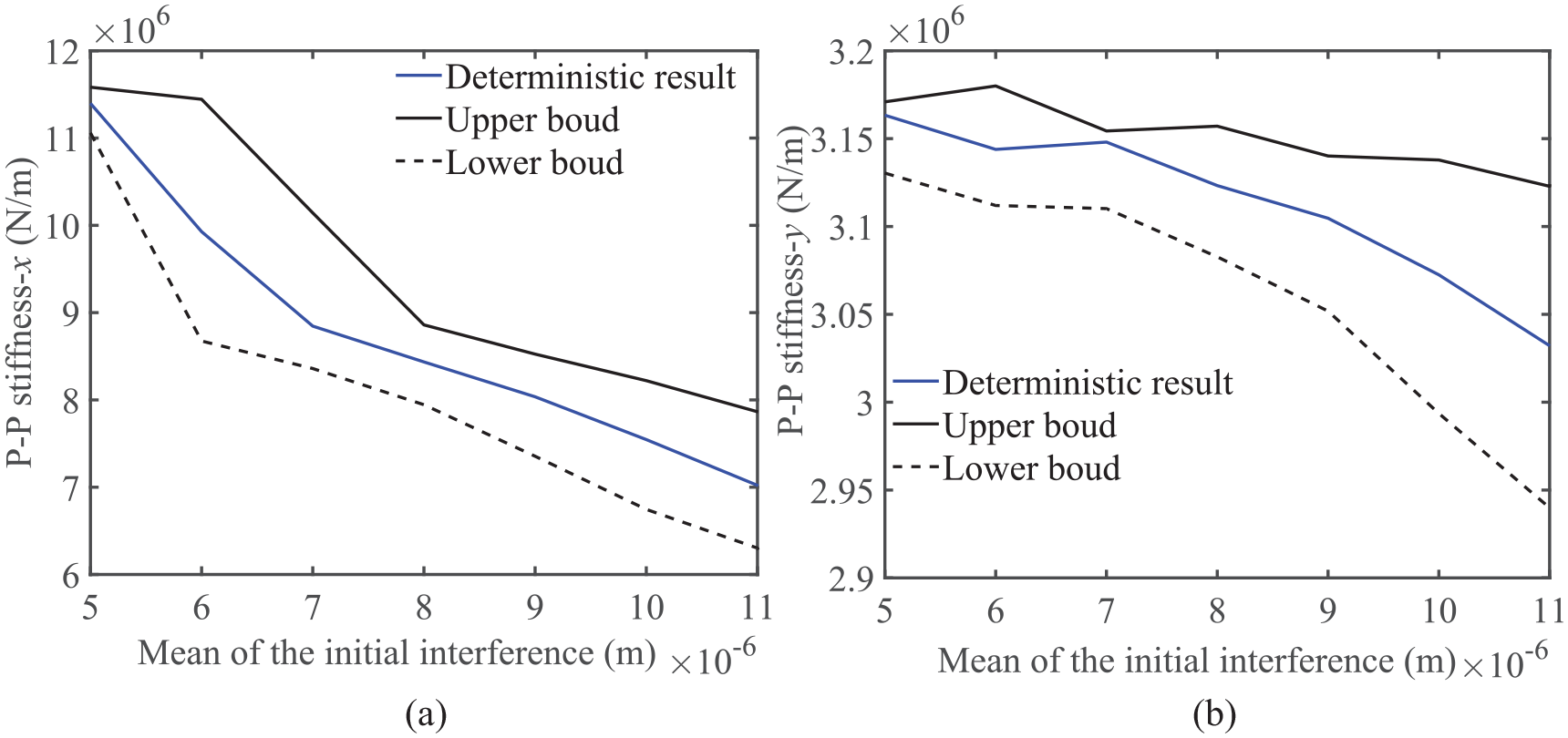
The two boundary curves and deterministic result of the P-P stiffness values versus the mean of initial interference: (a) x-direction and (b) y-direction.
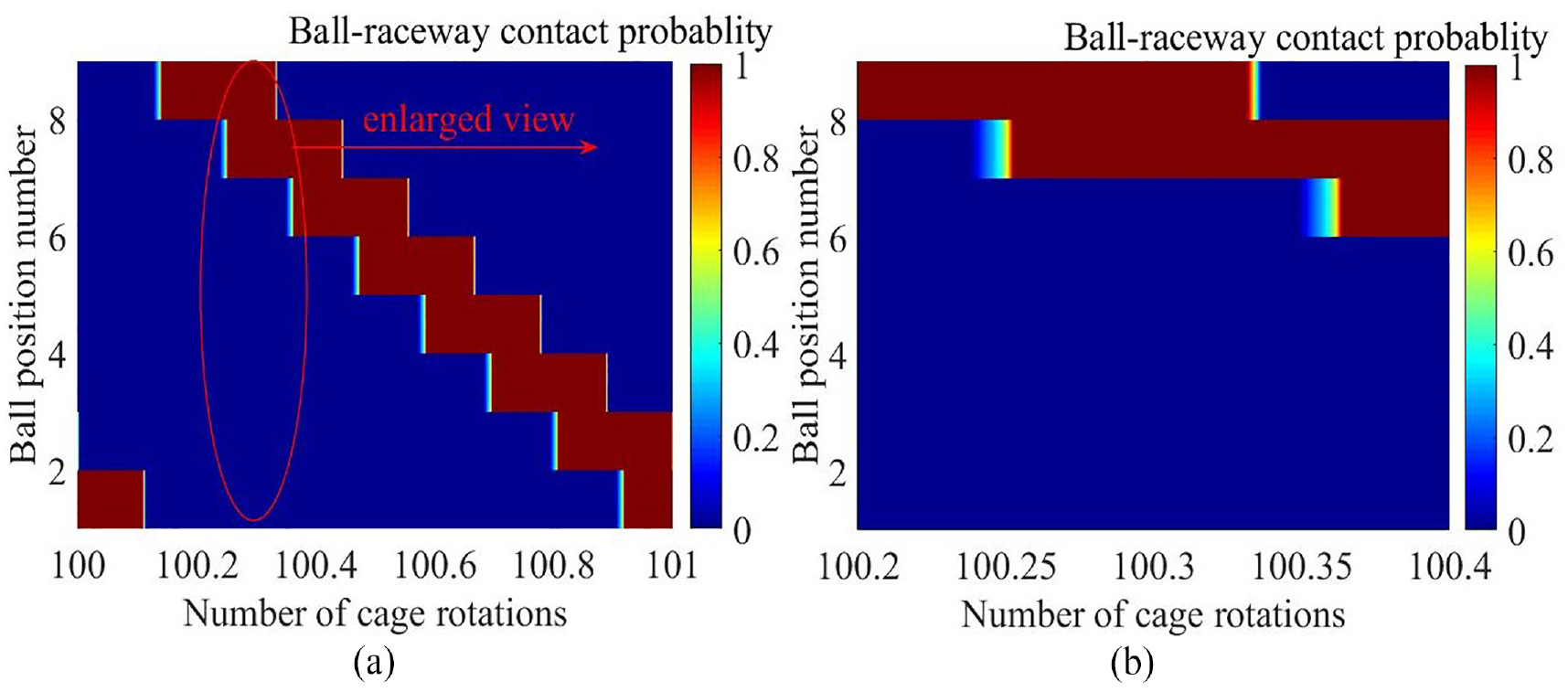
Time-varying ball-raceway contact probability when the initial interference Δ0 = 11 μm.
Influence of the deviation coefficient of the initial interference fit
In order to study the influence of the variation of the interference amounts, let assumed the rotor speed is 5000 r/min, the numerical cases with different variation coefficient are conducted. The numerical results are given in Figures 13 to 19. The results in Figures 13 to 15 show that the deterministic curves under the designed interference amount Δ0 = 10 μm are enveloped by the two boundary curves calculated under the different variation coefficient. It can be found that the displacement in time domain and frequency domain could be significantly affected by the variation coefficient. And when the variation coefficients increase, the uncertainty of the uncertain response increases. According to the changes rule shown in Figure 16, the reason is that when the mean value of the interference amount is constant, two boundary curves of the actual interference amounts and radial clearance will increase when the variation coefficients of the interference amounts increase. It is worth point out that the actual interference amounts is smaller than the results calculated without considering the centrifugal effect. Numerical results in Figures 17 and 18 show that with the increase of the variation coefficient, the two boundary curves of the P-P values of the displacement and stiffness get larger and the uncertainty of the response increases. The results in Figure 19 give the time-dependent characteristics of contact probability versus variation coefficients of initial interference. It can be concluded that when the variation coefficients increase, the duration time of the ball involving carrying the load determinately decreased and the duration time of the uncertain ball-raceway contact state increase.
Comparison of the displacement response with different variation coefficient of initial interference value: (a) displacement of x direction and (b) displacement of y direction.
Comparison of the spectrum with different variation coefficient of initial interference: (a) displacement of x direction and (b) displacement of y direction.
Comparison of the stiffness response with different variation coefficient of initial interference value: (a) displacement of x direction and (b) displacement of y direction.
The two boundary curves versus the variation coefficient of initial interference: (a) uncertain interference value and (b) uncertain radial clearance.
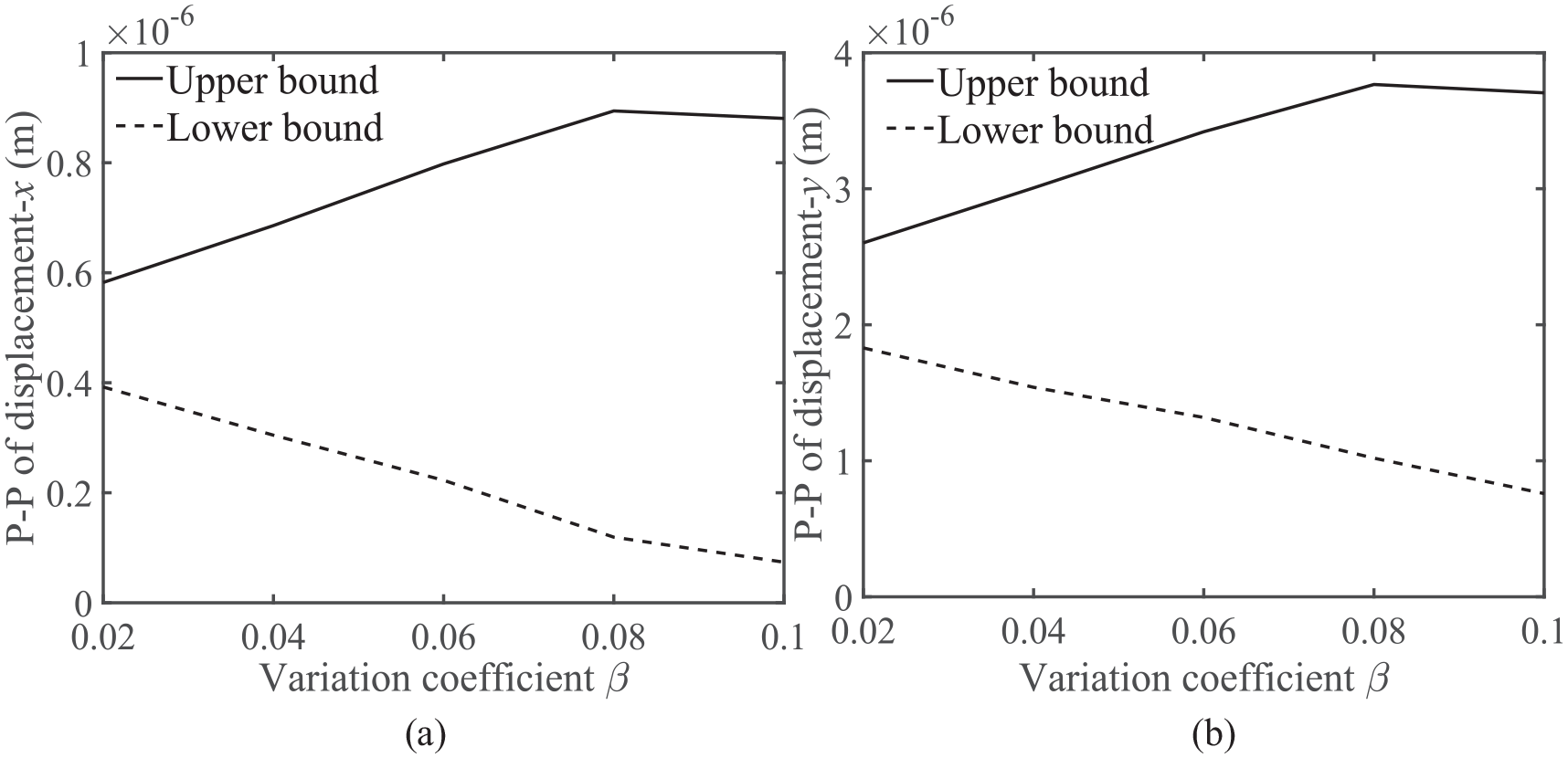
The two boundary curves and deterministic curves of P-P displacement versus the variation coefficient of initial interference: (a) x-direction and (b) y-direction.
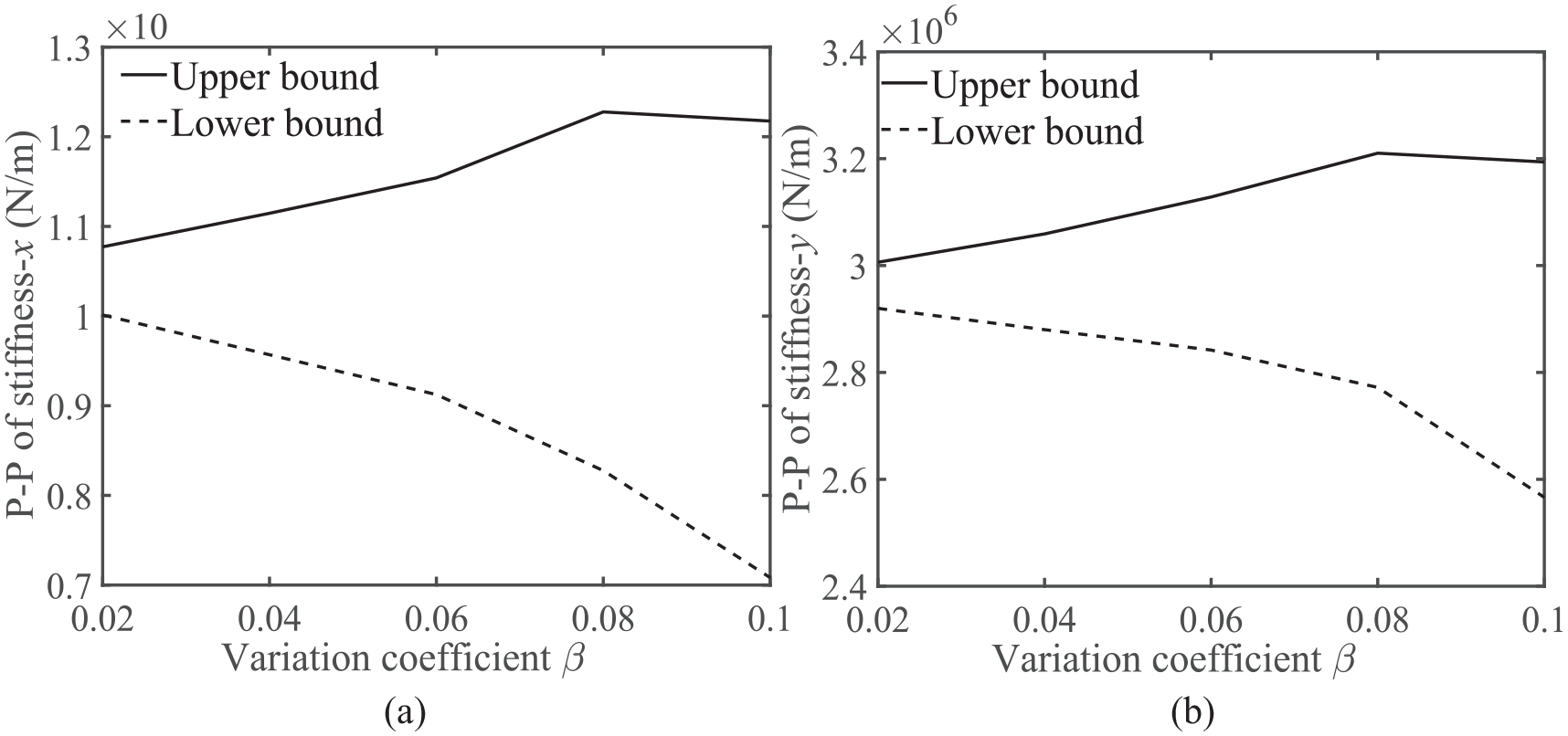
The upper bound, lower bound and deterministic result of P-P stiffness values versus the variation coefficient of initial interference: (a) x-direction and (b) y-direction.
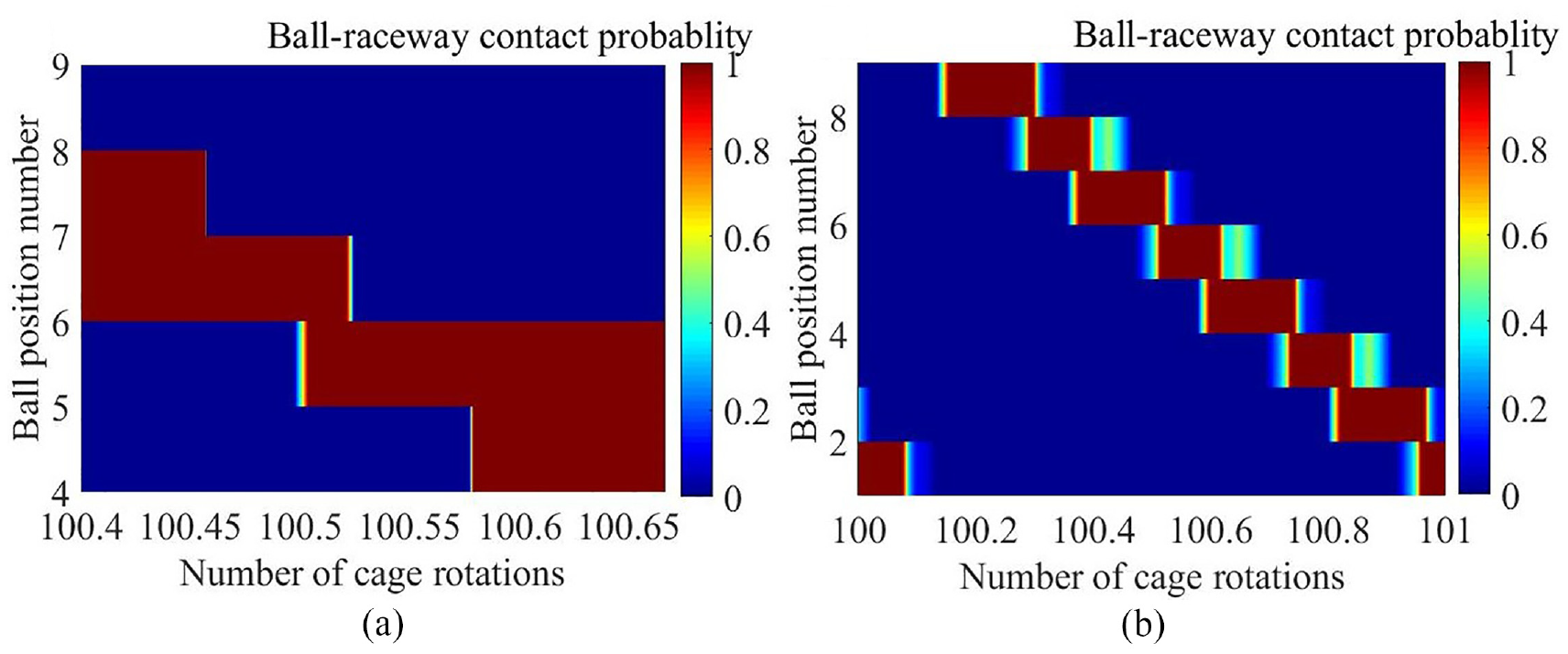
Time-varying ball-raceway contact probability with different variation coefficient of the initial interference: (a) β = 0.02 and (b) β = 0.1.
Influence of the rotor rotational speed
In this section, in order to analyze the influence of the rotor rotational speed, numerical cases with variation coefficientd β = 0.01 and 0.02 under the rotor speed from 200 to 20,000 r/min are conducted. Figure 20 shows the two boundary curves of the amplitude-frequency response at different variation coefficient. It can be seen that the two boundary curves of the P-P values of displacement and stiffness in both directions change dramatically when the rotor rotational speeds increase, and the P-P values with larger variation coefficient have larger intervals. Figure 21 shows the comparison between the scanning results and the two boundary curves when the variation coefficient β = 0.02. It can be seen that the scanning results are enveloped by the two boundary curves, the results illustrate that when the uncertain interference amounts are taken into consideration, the actual amplitude frequency of the system could be uncertain. The numerical results in Figure 22 show the changes of the upper bound, lower bound, deterministic curve of the interference amounts, and radial clearance versus the rotor speed. It can be seen that the actual interference amounts and radial clearance are uncertain due to the uncertain initial interference and the high speed centrifugal effect. One can see that when the variation coefficient is larger, the intervals of the actual interference amounts and radial clearance become larger, which will significantly influence the response of the rotor-ball bearing system. Therefore, the uncertain interference amounts should be fully considered at the stage of design.
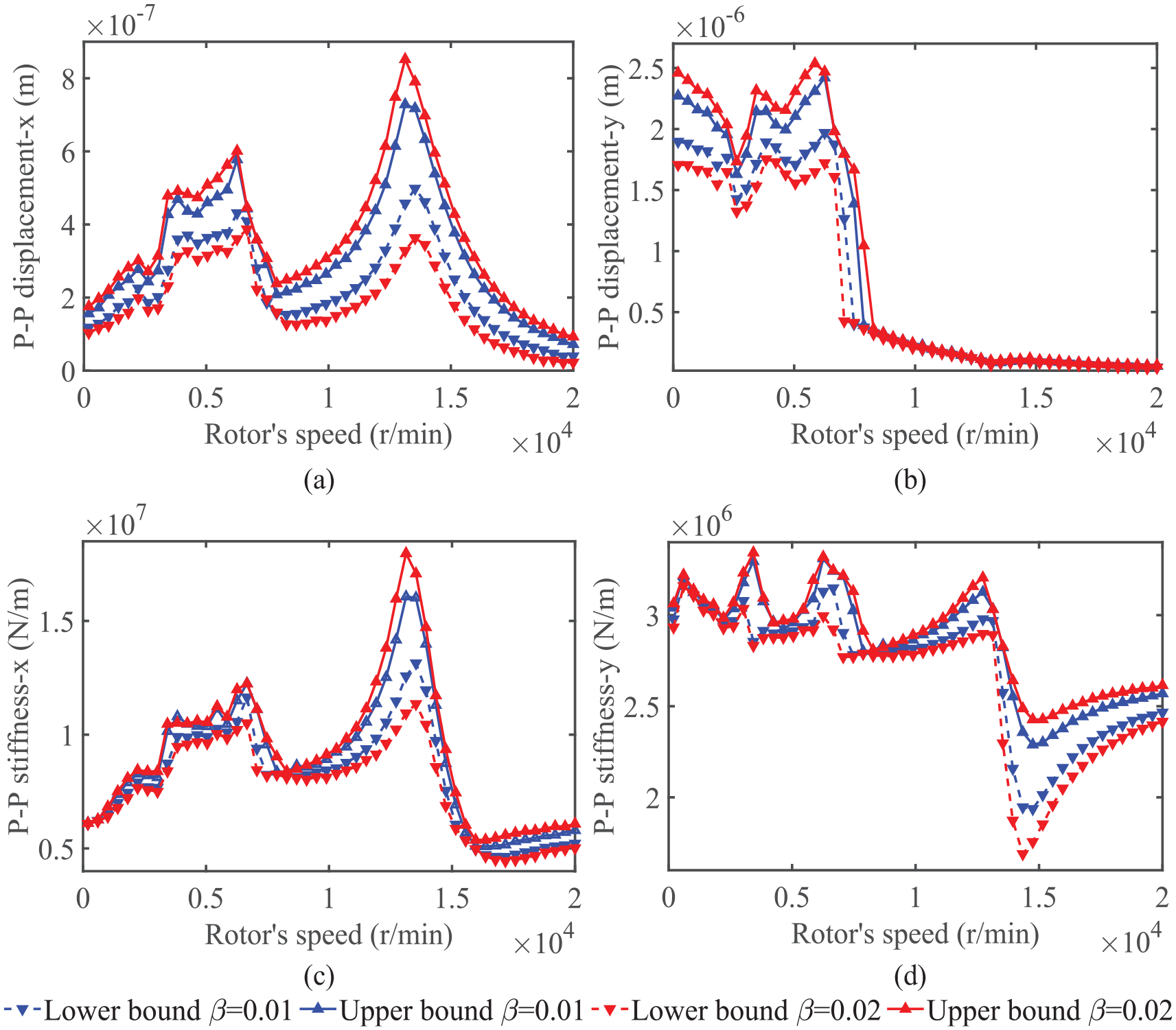
The two boundary curves of the amplitude-frequency response with different variation coefficient: (a) P-P displacement of x direction, (b) P-P displacement of y direction, (c) P-P stiffness of x direction, and (d) P-P stiffness of y direction.
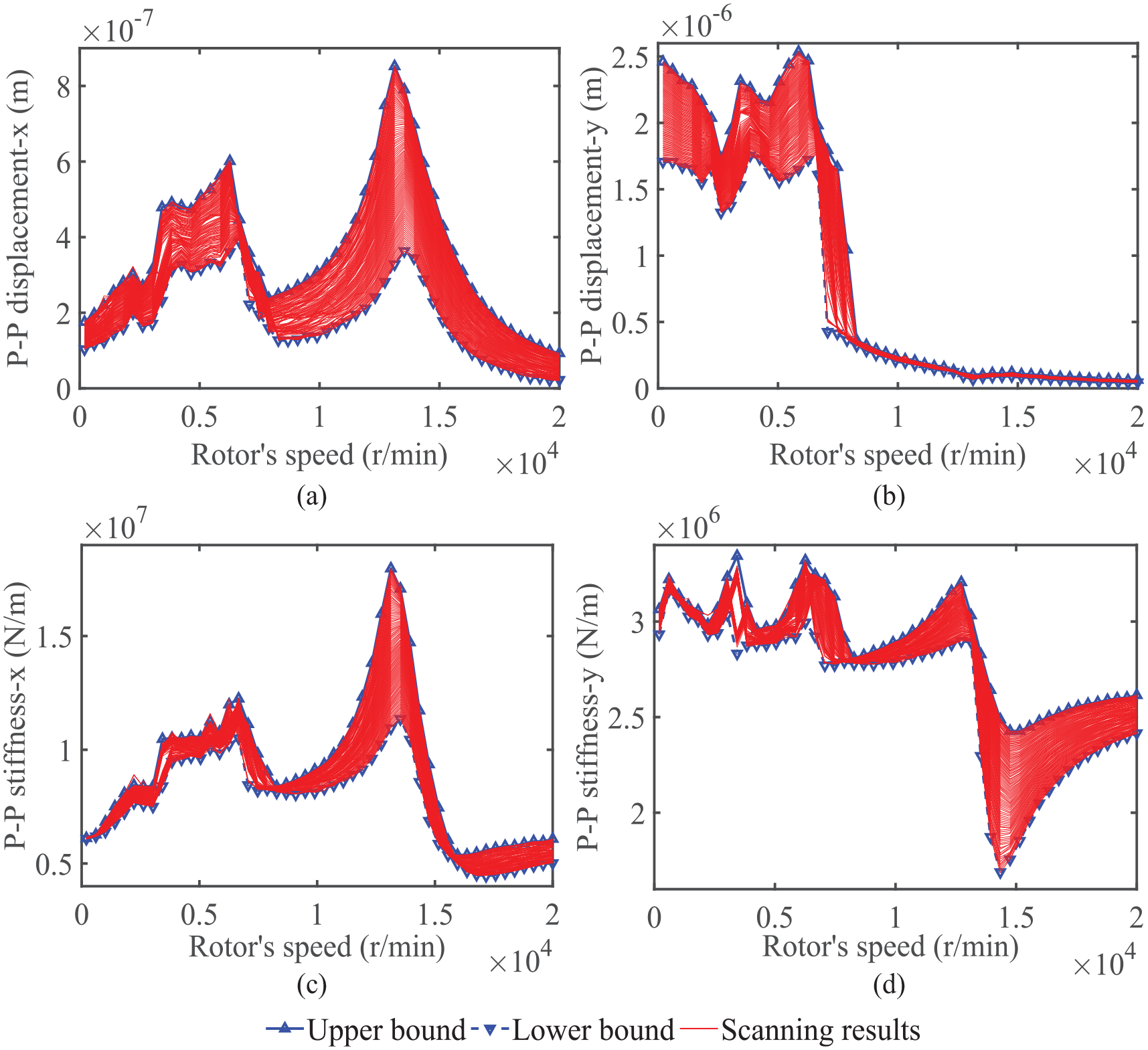
Comparison of the amplitude-frequency response between the scanning results and the envelop results: (a) P-P displacement of x direction, (b) P-P displacement of y direction, (c) P-P stiffness of x direction, and (d) P-P stiffness of y direction;.
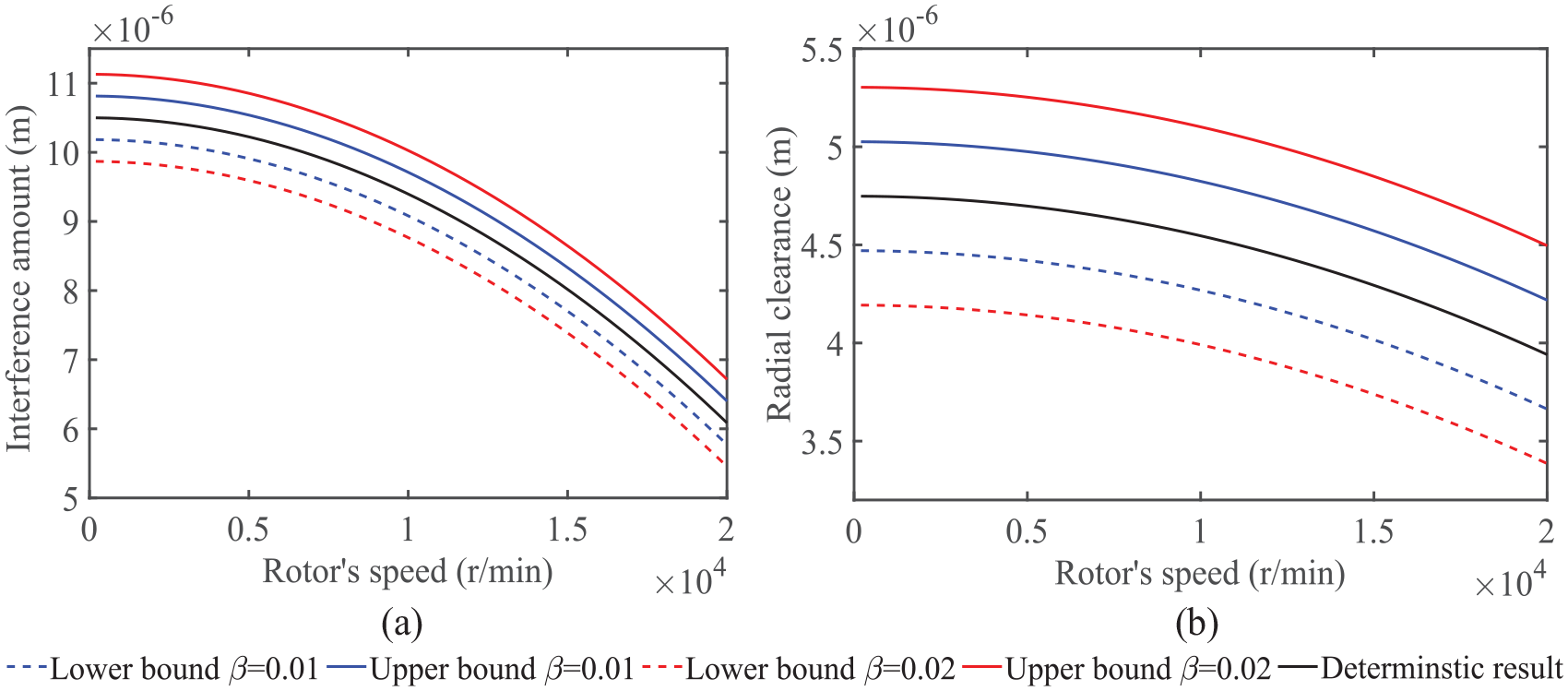
The upper bound, lower bound, and deterministic curve versus the rotor speed: (a) uncertain interference amount and (b) uncertain radial clearance.
Conclusion
In this paper, considering the effect of the uncertain bearing-shaft interference amounts, the VC vibration characteristics of the ball bearing are investigated by using the Chebyshev interval method. The uncertain ball-raceway contact mechanism is described quantitatively by the time-dependent contact probability. The two boundary curves of the time history, P-P values of the displacement response and time-varying stiffness are calculated under different conditions. The following conclusions could be given as
The uncertain interference amounts could result in significant changes in the response of the rotor-ball bearing system. And when the average initial interference amounts increase, the average radial clearance decreases, while the interval bounds of the actual interference amounts and radial clearance get larger, the changes will affect the actual varying compliance vibration response.
When the variation coefficients of the interference amounts increase, the uncertainty of the actual interference amounts and the radial clearance get larger, the intervals defined by the two response bounds of the rotor system get larger.
The effect of the uncertain interference amounts should not be ignored because the uncertainty could significantly influence the actual interference amounts and radial clearance, which could resulting significant fluctuation in the response of the varying compliance vibration.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors acknowledge the Natural Science Foundation of the Jiangsu higher Education Institutions of China (21KJB460007), Jiangsu Industry–University Research Cooperation Project of China (BY2021353) for supporting this research.