
Abstract
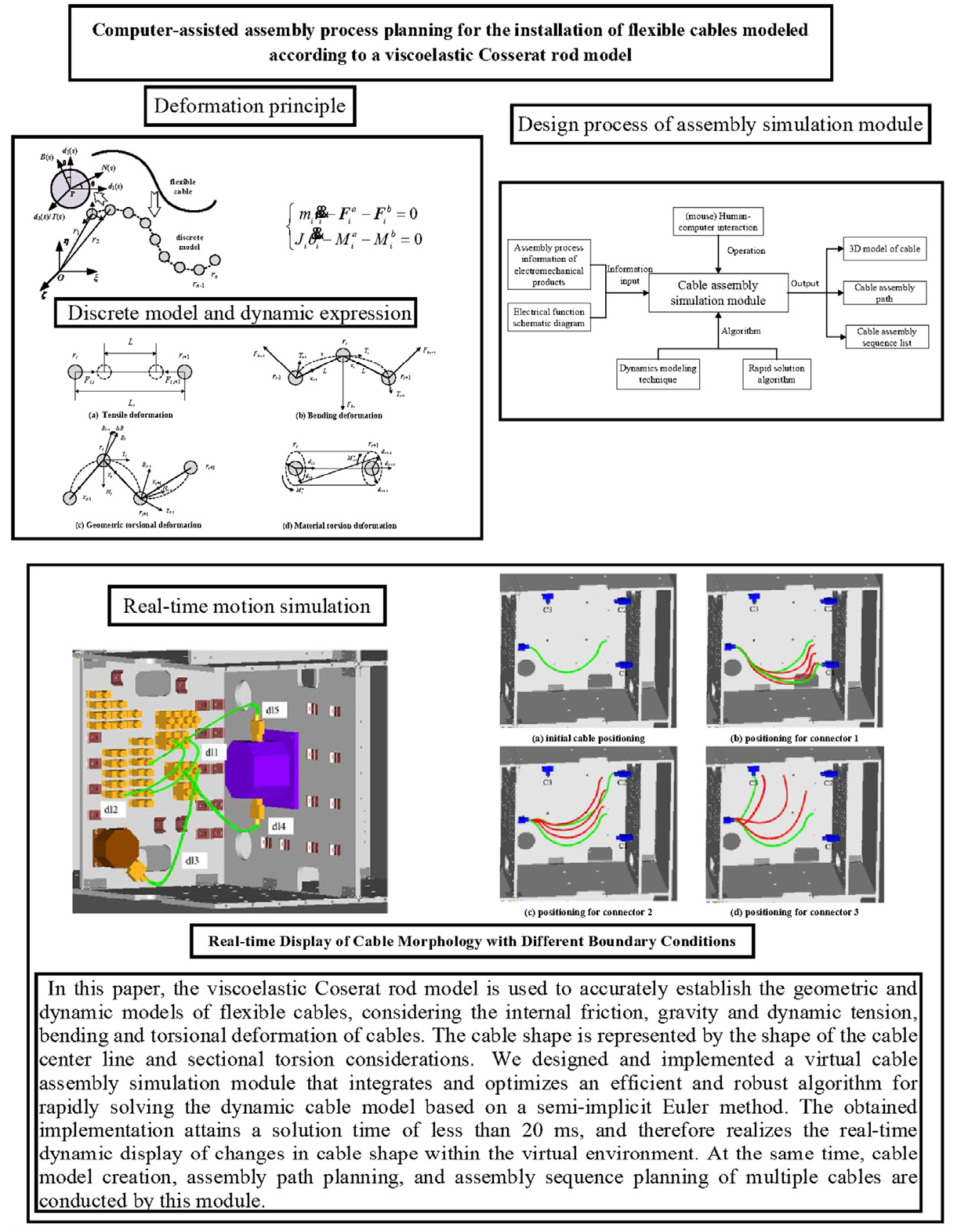
Available computer-aided assembly process planning methods fail to provide the necessary level of accuracy required by modern complex planning processes owing to the neglect of the internal friction arising in the process of cable movement and large cable deformation conditions. The present study addresses this issue by developing a computer-aided assembly process planning method that inherently considers the tensile, bending, and torsional deformations of cables based on a dynamic viscoelastic Cosserat model describing cable motion. The simulation module of the virtual cable assembly process integrates and optimizes an efficient and robust algorithm for rapidly solving the dynamic cable model based on a semi-implicit Euler method. The performance of the proposed method is verified by demonstrating the rationality and accuracy of the assembly path planning and multi-cable assembly sequence obtained by the virtual assembly simulation module for a modeled prototype of a complex electromechanical product produced in the aerospace industry.
Keywords
Get full access to this article
View all access options for this article.