
Abstract
Humanoid robots, with their overall resemblance to a human body, is modeled for flawless interaction with human-made tools or the environment. In this study, navigation of humanoid robot using hybrid Artificial potential field (APF) and Moth flame optimization (MFO) approach have been performed. The hybrid approach provides the final turning angle (FTA), which is optimum to avoid collision with the hindrances. APF utilizes a negative potential field and a positive potential field to find the location of obstacles and target, respectively. The navigation starts towards the target; when the robot interacts with the obstacle, APF provides an intermediate angle (IA). The IA, along with the position of the obstacle, is fed into MFO as an input. This technique provides the FTA (optimum) to avoid collisions and guide a robot to the target. It is implemented in a single humanoid system and a multi-humanoid system. The presence of multiple humanoids can create the chance of inter-collision. It is dismissed by employing a dining philosopher controller to the proposed technique. Simulations and experiments are accomplished on simulated and real humanoid NAO. The coherency in the behavior of the results evaluated by the simulations and real-time experiments demonstrates the efficiency of the proposed AI technique. Comparisons are performed with a previously used method to validate the robustness of the technique.
Keywords
Introduction
Route outlining is explained as the method of directing a humanoid robot to a particular position via a certain route in a specific time limit and distance traveled. Navigation is concerned with finding the most efficient path while avoiding obstacles in its path and hence decreasing the time required for the locomotion and therefore conserving energy. Humanoid robot navigation is thus the locomotion of the robot from the initial point to the endpoint while shunning any collision with the hurdles. The necessity of humanoid robots has increased due to increased complexity, improved hardware and research being follow out in unsafe locations. The requirement of the humanoid robots has enhanced due to the impossibility of the interaction of humans in various situations like fire, nuclear tests, etc. Determining the optimality standards is based on accepting the terrain and working situations into thought. During route outlining, the threshold distance is taken into account and hence the final path is decided such that the travel distance should not be longer than expected. To solve the route outlining cases of humanoid robots, different researchers have applied various meta-heuristic approaches. The nature-based algorithms primarily consist of swarm-based approaches which are based on the behavior of various biological substances in nature.
Various navigational techniques have been employed on multiple robots by researchers.1–10 Pradhan et al. 11 have examined the route outlining of multiple robots by the use of the Neuro-Fuzzy approach. The travel length and travel time are observed to accumulate with the conventional approach via a rule-based approach. Li et al. 12 have performed simulations and reviewed that route outlining in terrain can be effectively upgraded by enforcing it to attain the behavior-based dominance for the robot route outlining in an unknown working space. Baturone et al. 13 have emphasized an efficient route outlining arrangement using a neuro-fuzzy approach for the mobile robot. They have obtained an effective technique for avoiding obstacles and treading the path collision-free. The mobile robot navigation using hybrid simulated annealing artificial neural network technique. 14 The proposed method helps in fast convergence of the result of simulated annealing, which provides navigation in lesser travel time and travel length. Deepak et al. 15 have developed navigation in optimal travel time for wheeled robots using the innate immune system. They have proposed it to obtain shunning obstacle navigation. Pandey et al. 16 have emphasized the ANFIS controller to design the trajectory for mobile robots in complex terrain. The efficacy and robustness of the technique have been checked using MATLAB software. The mobile robot navigation has been proposed in Patle et al. 17 using the fuzzy method. Singh et al. 18 have employed the usage of neural network strategy for route outlining of mobile robots in unknown complex scenarios whilst avoidance of collisions. Gigras et al. 19 have emphasized on the development of a twin hybrid navigation strategy based on the culmination of ant colony approach and the swarm intelligence techniques for better course outlining of mobile wheeled robots. Huang 20 has emphasized a better route outling approach based on metaheuristic hybridized strategies for four wheeled mobile robots. Châari et al. 21 have proposed an improvised hybrid navigation planner for optimized route outlining for mobile robots.
Akhtaruzzaman et al. 22 have emphasized the implementation of a navigation approach for mobile robots in an indoor environment for optimized walking, turning and obstacle avoidance. Clever and Mombaur 23 have emphasized a walking transfer idea rooted in an inverse optimal approach methodology for the alteration of human movement to a humanoid robot. In this paper, the optimality criteria are being decided on human motion capture demonstrations. For finding the optimum path, the features of the humanoid robot, along with the terrain conditions, are being considered. Sahu et al. 24 have proposed a new route outlining approach based on guiding the humanoid robot in complicated terrain. The methodology used here is the Adaptive ant colony optimization, where the standoff distance is taken as input, and the robot diversion angle is provided as the output to reach the required location. Mirjalili et al. 25 have proposed an online route outlining method for the humanoid robot (SURENA III) rooted in control designs. Shimizu and Sugihara 26 have described a route outlining method for humanoid robots rooted in the transitional sequence of the DSP (double support phase) of steps. It considers the DSP (Double support phase), in which the humanoid robot is considered in various stances during its walking phase. Schmid and Woern 27 have proposed a method for route outlining of humanoid robots by taking the NURBS curve into consideration. It has been used for determining the obstacle-free polyline path during the locomotion of a robot. Kashyap et al. 28 have emphasized dynamically stable movement for the humanoid robot considering the whole-body control approach. The paper emphasized converting the statistical balance of humanoid robots into dynamically balanced navigation by utilizing a simulated annealing approach. Ido et al. 29 have emphasized an algorithm rooted in camera view for route outlining jobs. A stable image capturing method based on the detection of optical flows was developed to minimize the blurring and swing of the images due to the motion of the camera. The navigation formulation method employed here is used for indoor environments only.
From the thorough investigation of the literature presents, it has been observed that the wheeled robot route outlining is a trendy topic and have various researches. Humanoid robot navigation does not have researches as compared to mobile robots. But, in the last few years, it is gaining interest, and researches have been performed. The navigation of the humanoid robot is the fundamental element in the researches of humanoid robots. The researches for route outlining of multiple humanoid robots in a single terrain is also limited. There are many articles where the authors have applied a single technique to guide the robot, but the result obtained is not up to the mark. It takes longer turns to avoid the obstacles, which increases the travel length and, subsequently, travel time. Therefore, in this paper, the hybridization of MFO and APF has been considered to obtain an optimum turning angle to avoid hindrances. The convergence of the proposed technique has been evaluated against a singly developed technique. The proposed technique is applied to a single humanoid robot. The case of inter-collision is eliminated by designing the dining philosopher controller with the proposed technique in the multi-humanoid system. It has been compared with the existing technique. The results obtained from a single humanoid system, multi-humanoid system, and comparison with the existing technique show the proposed technique is robust and efficient.
The rest of the paper has been designed as follow: Portion 2 describes the Architecture of control technique, comparison of various techniques has been described in Portion 3, the implementation of hybrid APF-MFO approach in humanoid robot NAO is displayed in Portion 4, and the comparison with the existing technique is portrayed in Portion 5. At last, the conclusion and future work have been displayed in Portion 6.
Architecture of control technique
The fundamental route outlining parameters utilized in a humanoid robot path planning are Right Obstacle Range (ROR), Front Obstacle Range (FOR), Left Obstacle Range (LOR) and Turning Angle (TA). LOR, ROR, and FOR are the input parameters to the sensory controller and TA acts as the output parameter as a result of the data obtained from input variables. The sensory information extracted from the input parameters is fed to the controller. Figure 1 shows the behavior of a robot in such a situation.
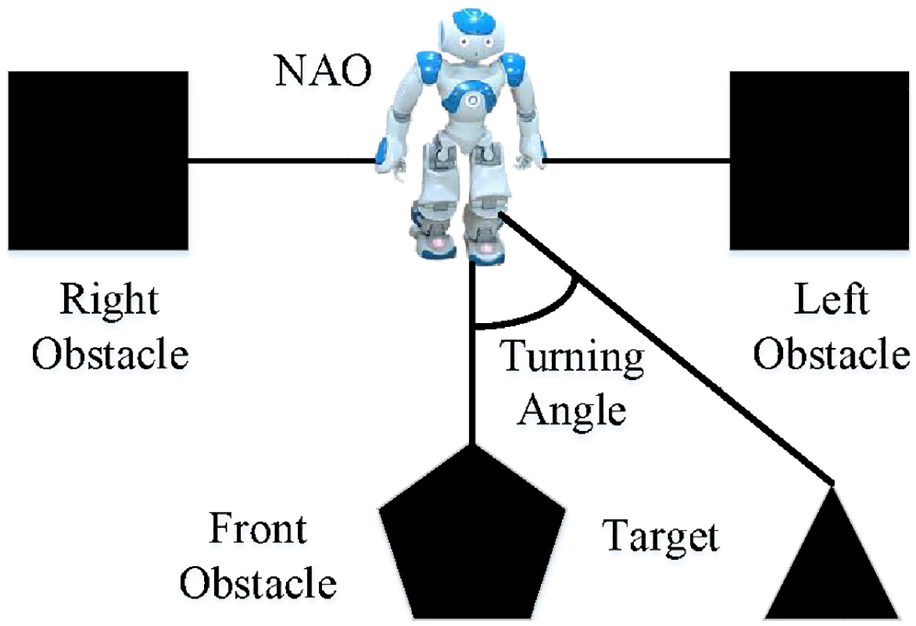
Obstacles around the NAO humanoid robot and the turning angle obtained to reach the target.
Moth-flame optimization algorithm
The nature-inspired optimization technique, therefore selected after the literature review, is the Moth-flame optimization algorithm. 30 It is based on the particular navigation method of moths during the nights. Moths are evolved to fly during the nights using the light of the moon. They use a particular network known as traverse orientation. The moth flies at a certain angle with regard to the moon, which is very effective for long locomotion distances in a specific direction, as shown in Figure 2.
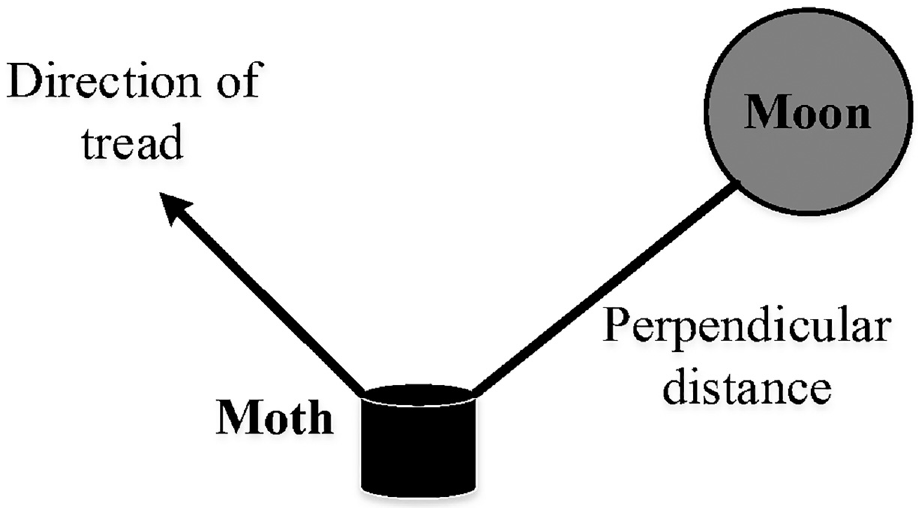
Moth movement with respect to moon.
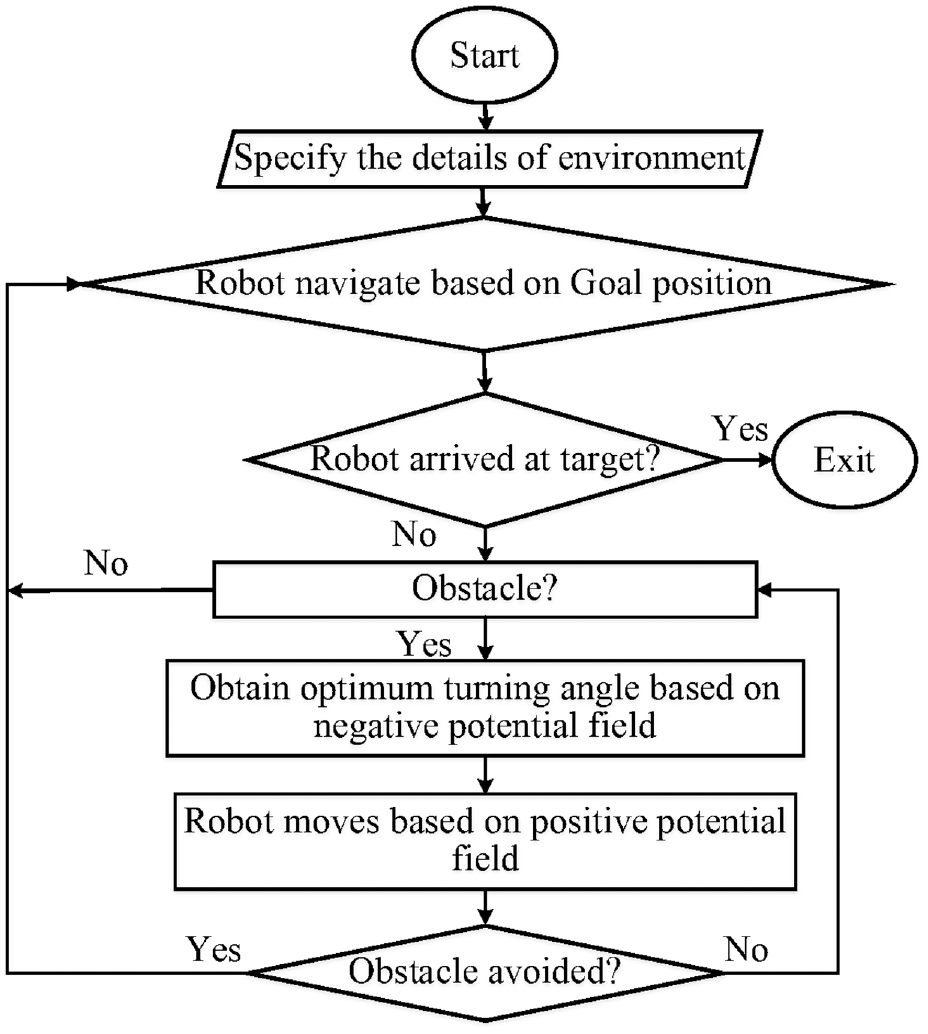
Regardless of the potency of transverse orientation, moths are seen to be flying spirally in the night due to interference from other artificial light sources. Since the distance from the artificial light source is much less than that of the moon, the moths try to maintain a certain angle, which creates a deadly path for them. Hence, in this methodology, by changing the location of the flame (center about which motion occurs), the path of the moth can be changed as per requirement. The mathematical model proposed through this approach is known as Moth-Flame Optimization. The flowchart of this optimization process is depicted in Figure 3. In this model, the moth spirally ends up in the flame after traversing a certain distance. It depends on the

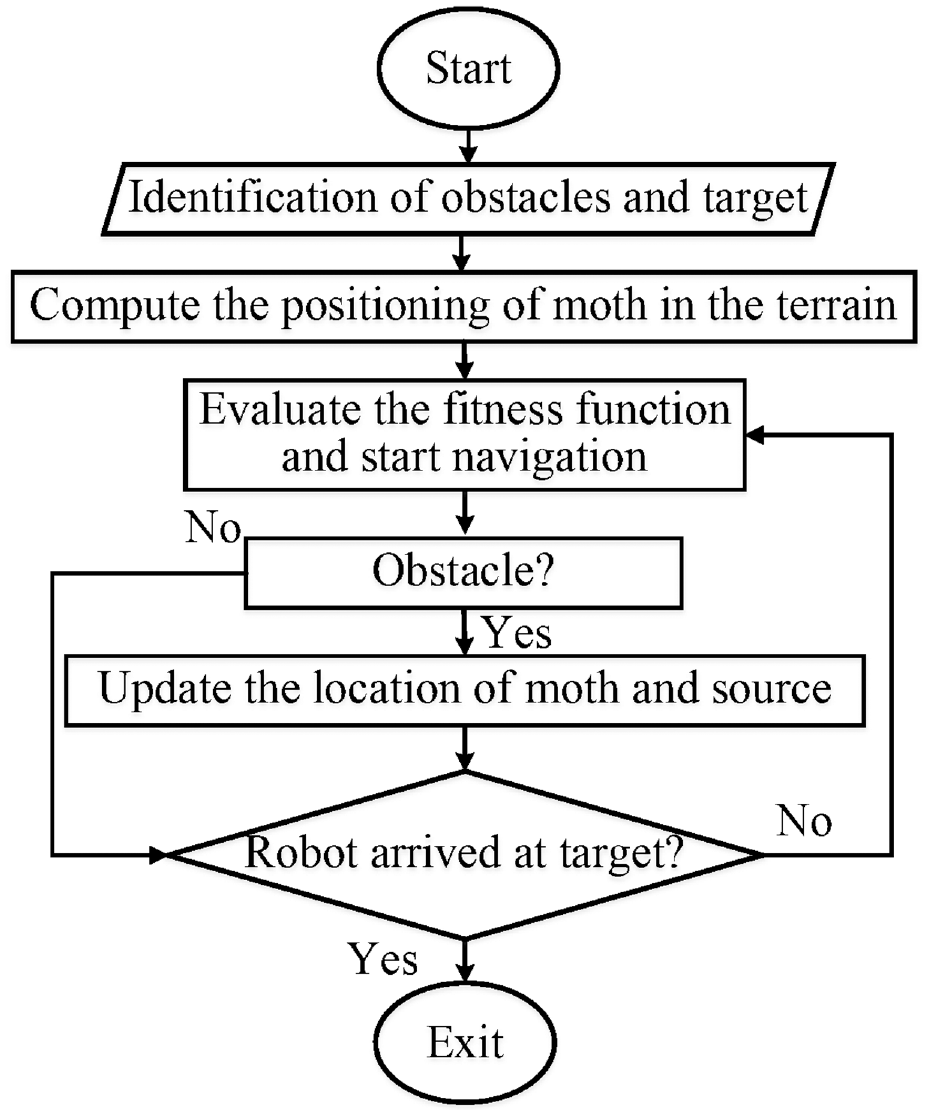
Flowchart of Moth flame optimization for robot navigation.
where,
The positioning of moths in the hunting area is based on traverse orientation and the path model used is the logarithmic spiral curve. It has the following characteristics:
The starting point of the spiral denotes the initialization of moth and the subsequent location of the flame is understand by the endpoint of the spiral.
Variations in the spiral curve’s sphere should be inside the hunting area range.
The logarithmic spiral for the MFO algorithm used is:

where,

Artificial potential field
The classical path planning approach used hereby is the Artificial Potential Field method. 31 It is based upon the existence of positive and negative forces in the surroundings of the robot. The APF can be used in both static and dynamic environments and can be used for both local and global path planning. The main aim is to derive an energy function for the system in which the robot traverses. The attractive potential function being used here is the quadratic well potential function. It is described as:

where,
The attractive force obtained from this gradient formula is depicted as:

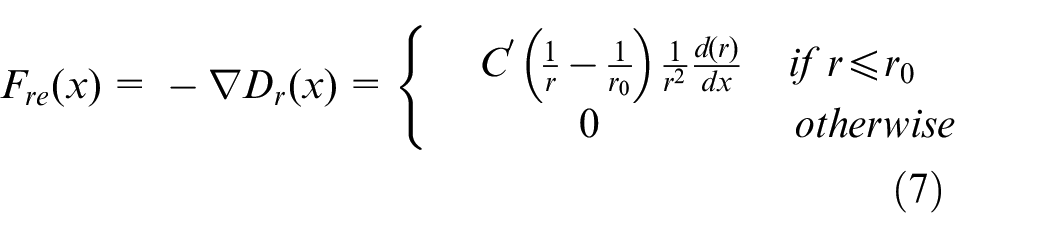
The repulsive potential function is the FIRAS function described as:

where,
The repulsive force thus obtained as:
The block diagram of the APF method is described in Figure 4.
Flowchart of Artificial potential field method for robot navigation.
Mechanism of hybridization of proposed approach
The steps employed for the working of the presented APF-MFO hybrid approach are:-
Initialize the start position of the humanoid robot.
Call the APF method, which decides the target location based on the attractive force experienced.
Once the humanoid counters any obstacle in its way, it is explored by the APF algorithm based on the repulsive forces generated.
Based on the various parameters like LOR, ROR and FOR, the value of intermediate angle (IA) is determined.
Initialize the MFO algorithm to determine the presence of a global minima position and avoid getting caught up in local minima.
The obtained IA along with the LOR, FOR and ROR is fed to the MFO method that provides FTA.
Repeat steps 2-6 until the OTA (optimum turning angle) is obtained and the robot arrives at the goal position without colliding the obstacles.
The hybridization process of the proposed approach is described in Figure 5.
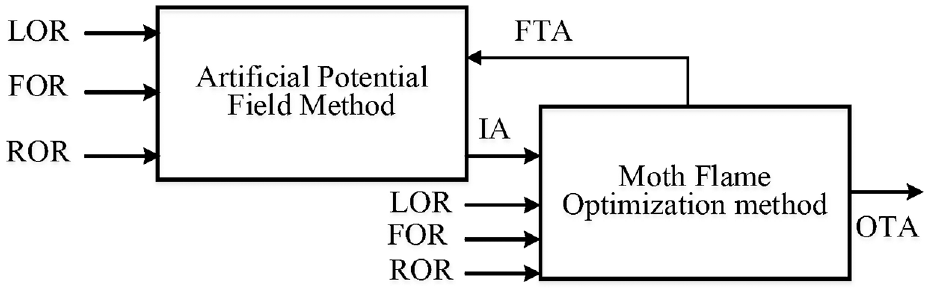
Hybridization process of APF-MFO approach.
Architecture of dinning philosopher controller for preventing self-collision
The proposed technique is efficient when implemented for a single humanoid navigation system on simulation and experimental platforms. However, in the scenario of a multi-humanoid navigation system, the proposed technique goes haywire whilst making decisions for inter-collision avoidance. The basic cause behind this anomaly is the consideration of dynamic obstacles as a single obstacle in the environment by multiple NAOs. Thus, failure in priority allotment leads to distortion in route outlining, for which the dining philosopher controller is hybridized along with the proposed controller. The dining philosopher controller is based on the simple rule of priority allotment to multiple variables in a given scenario. The proposed controller enacts out commands to direct the humanoids to trace the given paths according to a prescribed set of rules. The steps of the working mechanism of the dining philosopher are described in Figure 6.
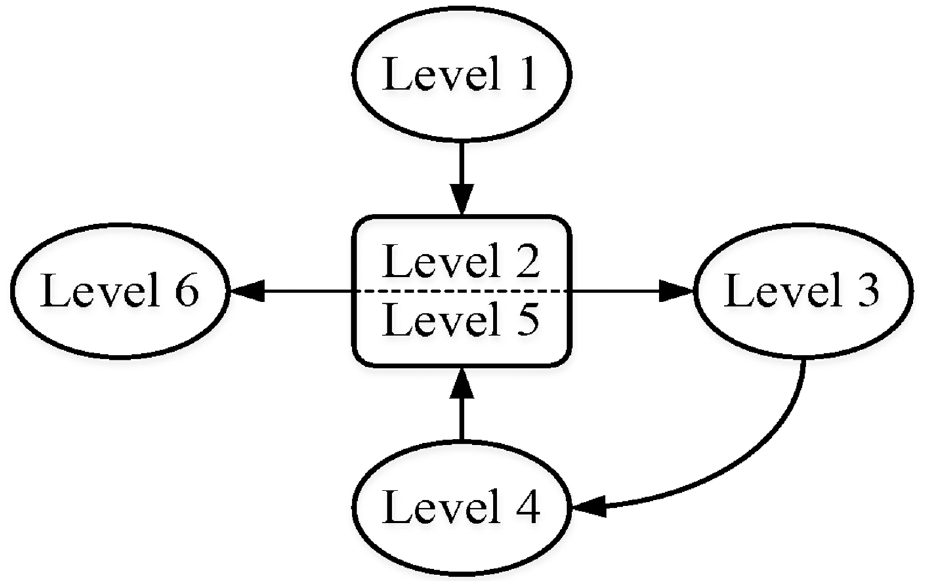
Dining philosopher working mechanism.
Comparison of effectiveness of different approach
The hybridization of the proposed approach has been done based on the mechanism described in the above section. Before implementing it in the humanoid robot, the effectiveness against the single used approach should be investigated. The main objective is to obtain the optimum path length. The optimum here describes that the path length should be minimum and also avoid the obstacle with the safest turning angle. The effectiveness of the different approaches has been investigated based on their convergence strength to obtain optimum path length. To compare, a simulation environment has been established where it consists of a start point, target, an obstacle and a robot, as shown in Figure 7. The robot senses the obstacle with its threshold range and takes a turn to avoid the obstacle. The robot does not come near the obstacle and takes a turn. But when the APF method activates after sensing the obstacle, it comes closer (safest distance) to the obstacle and takes the turn to avoid it. The TA after the activation of the proposed approach is optimum and the robot reaches the target with minimum path length.
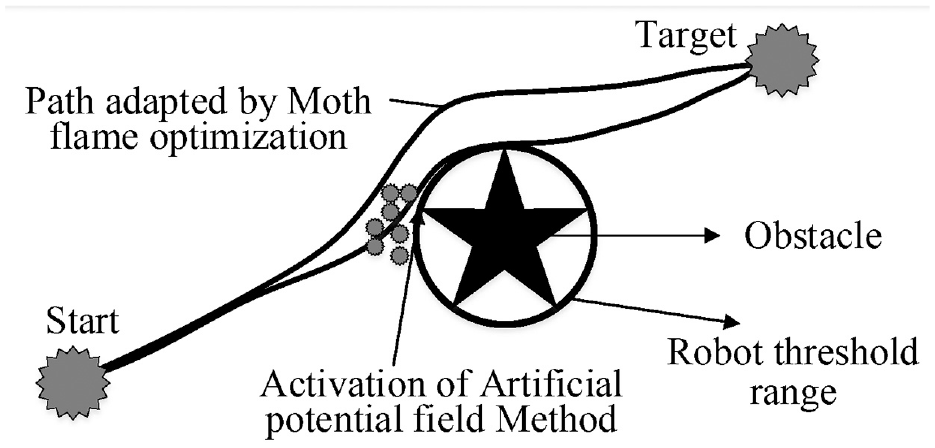
Path generation using hybrid APF-MFO approach to reach target.
The robot is guided to a specified target in an environment having randomly placed obstacles to evaluate the effectiveness of the proposed controller in reference to standalone algorithms. The robot navigation assignment is first examined on the basis of MFO. The assignment is to obtain the optimum path length. Further, a similar evaluation is performed based on APF and the proposed controller. Data obtained from all three controllers are plotted in a graph of optimal path length vs. number of iterations. The convergence curve based on this simulation is portrayed in Figure 8. It shows the proposed technique finds the optimum travel length in minimum iterations. The obtained results indicate that the presented controller is adequate to get optimal path length in lesser time. It is beneficial in lowering the computational effort and cost of assigned tasks.
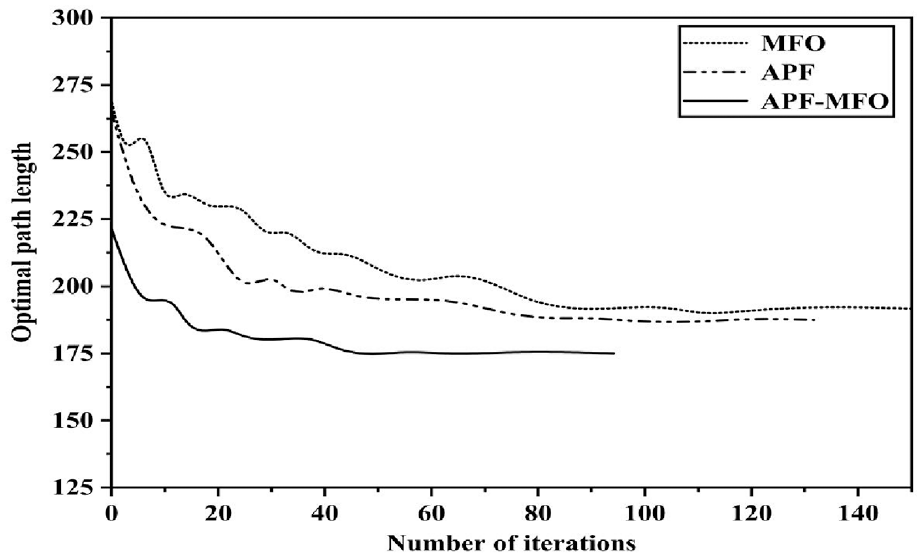
Convergence of APF, MFO and APF-MFO approach.
Analysis of proposed technique
The methodology used here is a hybridization of a nature-based Moth flame optimization and artificial potential field method. The humanoid robot model is placed in an environment with various obstacles and made to traverse from the start location to the target.
Description of the humanoid robot
NAO is a little reprogrammable humanoid robot evolved by Aldebaran Robotics. It is has a weight of 5.25 kg and a height of 57.3 cm and is fitted with various sensors like accelerometer, sonars, infrared, force-sensors, tactile sensors, etc. In this paper, NAO version V4 is being used as the robotic platform. NAO is equipped with encoders that can determine the joint torques acting at various motors present at the joint locations.
Implementation of proposed approach in single robot for simulation and real-time experimental terrain
The hybrid APF-MFO approach has been developed, and the effectiveness has been evaluated against the singly used technique. The convergence graph shows that the proposed approach is efficient to implement in the humanoid robot. The proposed controller has been first investigated in a simulated environment. It is performed in a 3D simulator (WEBOT). It is a famous simulation that is recommended by Aldebaran robotics. 32 They have advised that before implementing any behavior in the real robot, it can be tested in the WEBOT simulator. The result obtained has been validated in the real-time experiment. NAO robot walks and reaches the target. The snapshots of simulations and experiments are shown in Figures 9 and 10, respectively.
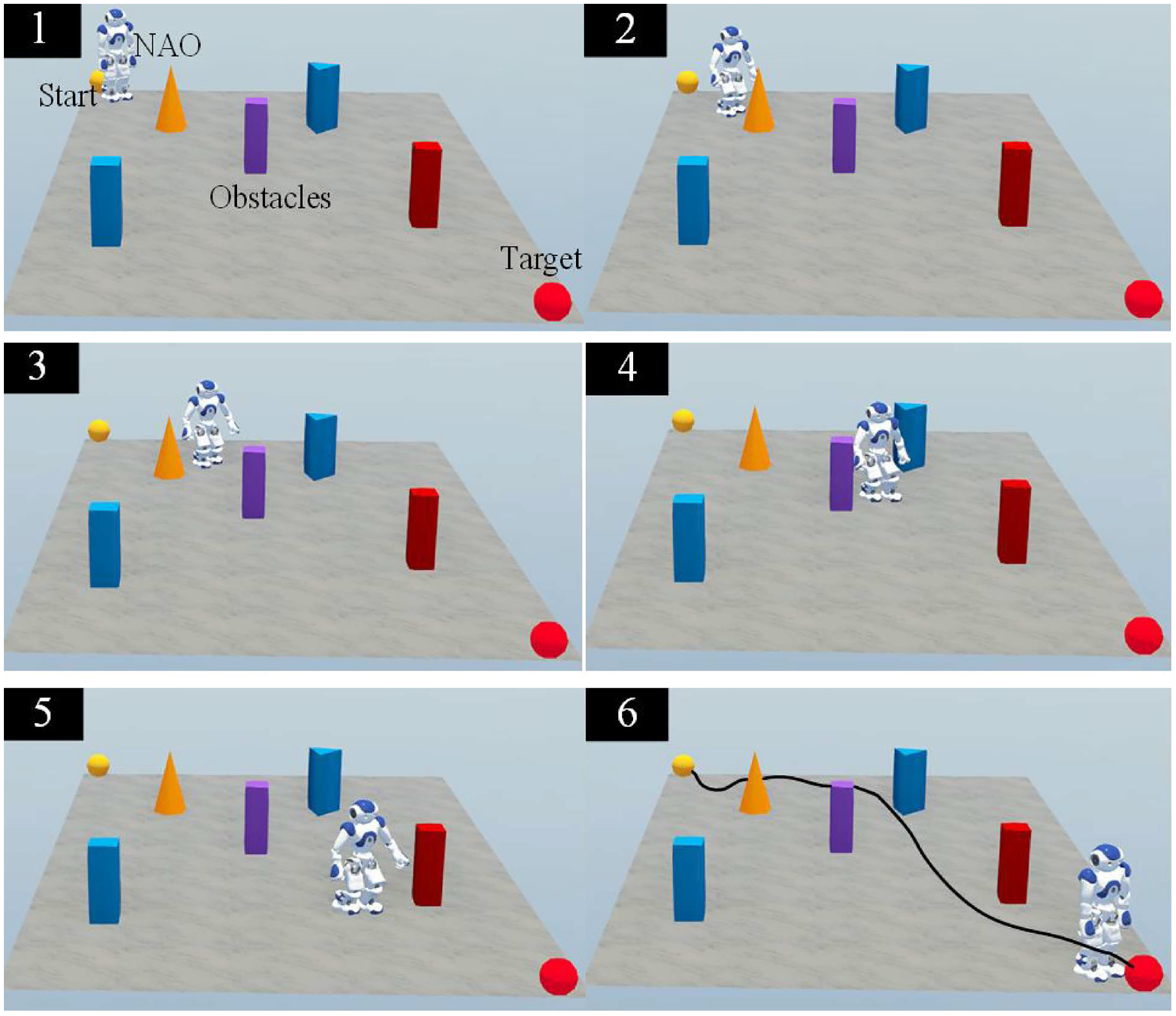
Simulation results of single humanoid traversing through a cluttered environment.
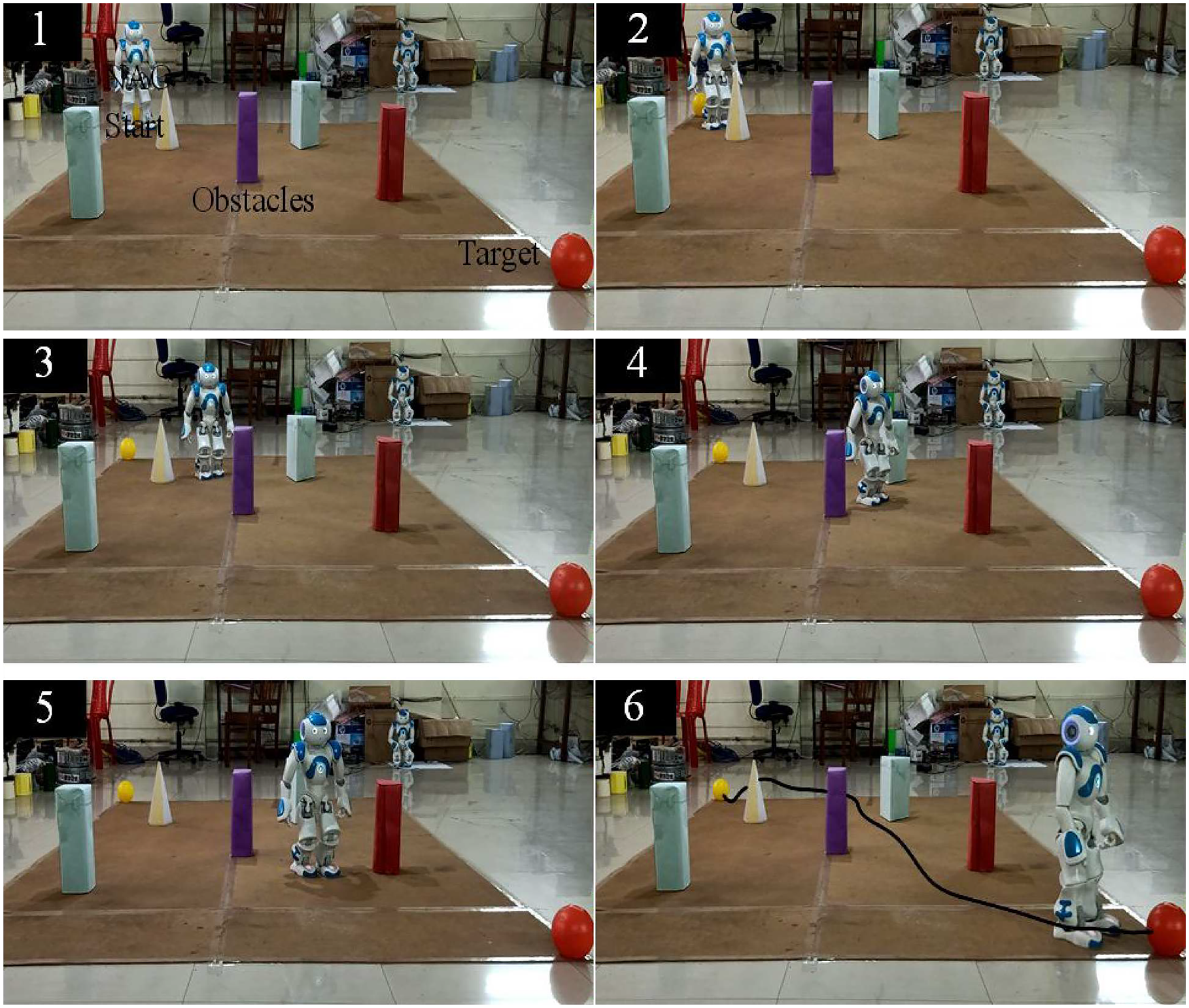
Experimental results of single humanoid traversing through a cluttered environment.
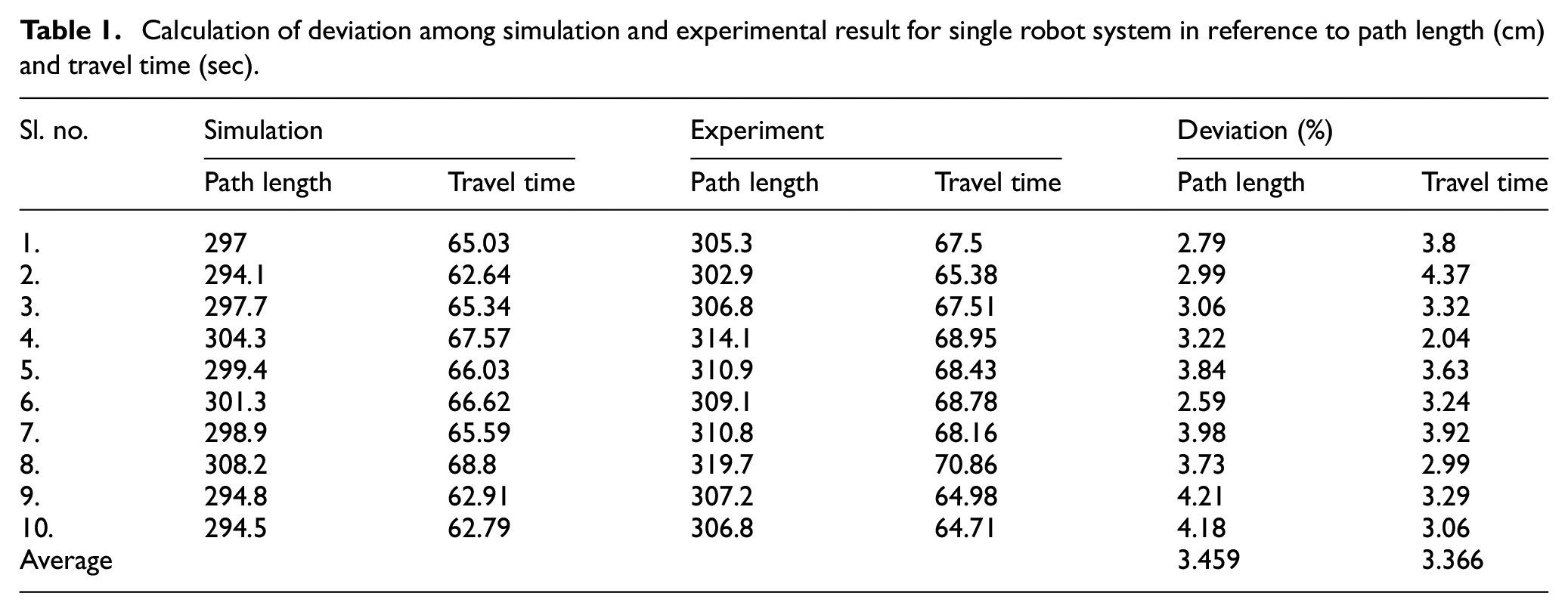
The data for both simulation and experiment has been recorded and displayed in Table 1. The path length (cm) and time (s) has been recorded directly from the WEBOT interface in simulation and using measuring tape and stopwatch in the experiment. The relation between simulation and experiment has shown a good relation with a deviation under 5%. The deviation is recorded due to the Wi-Fi connection, sound in the laboratory, difference in measuring techniques, etc. The robot successfully avoids all the obstacles in the terrain and reaches the target. The major advantage of the proposed approach is that it provides global minima results without getting trapped in a local minima condition.
Calculation of deviation among simulation and experimental result for single robot system in reference to path length (cm) and travel time (sec).
Implementation of proposed approach in multiple robots for simulation and real-time experimental terrain
The proposed technique has been successfully developed and tested in a single humanoid system. To check the robustness of the proposed technique, it has been implemented in the multi-humanoids system. In multi-humanoid systems, the challenge for inter-collision may arise. Therefore, to eliminate it, the dining philosopher controller is fed to all the humanoid robots along with the proposed technique. It is then implemented exercised in simulated and experimental terrain. The simulations and experiments are carried out in the terrain, having some random obstacles, two targets and two robots. Figures 11 and 12 show the snapshots of the simulation and experimental results of the implementation of the proposed approach in multiple humanoid robots, respectively. The data has been recorded similarly as it is done in a single robot system.
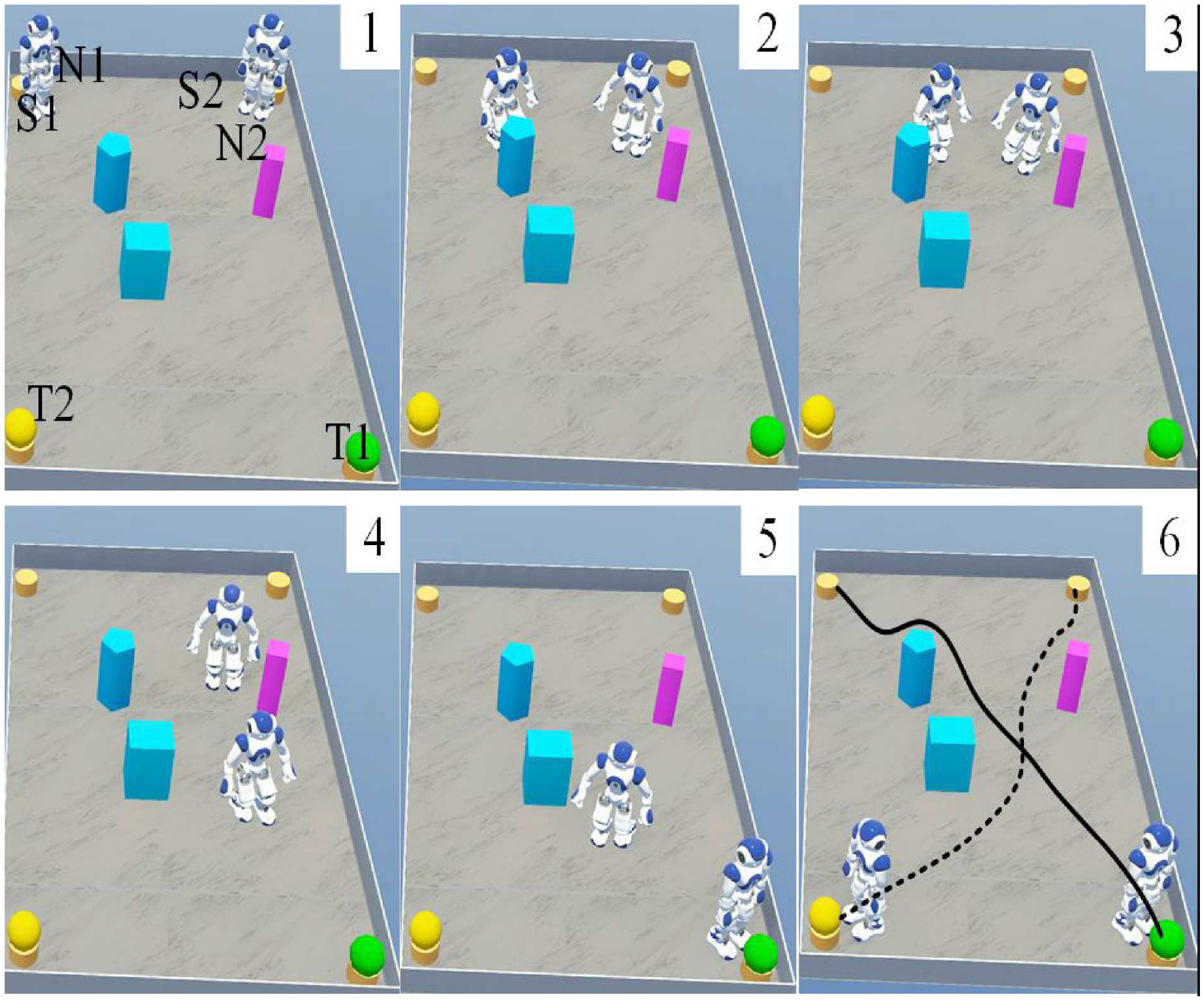
Simulation results of multiple humanoids traversing through a cluttered environment.
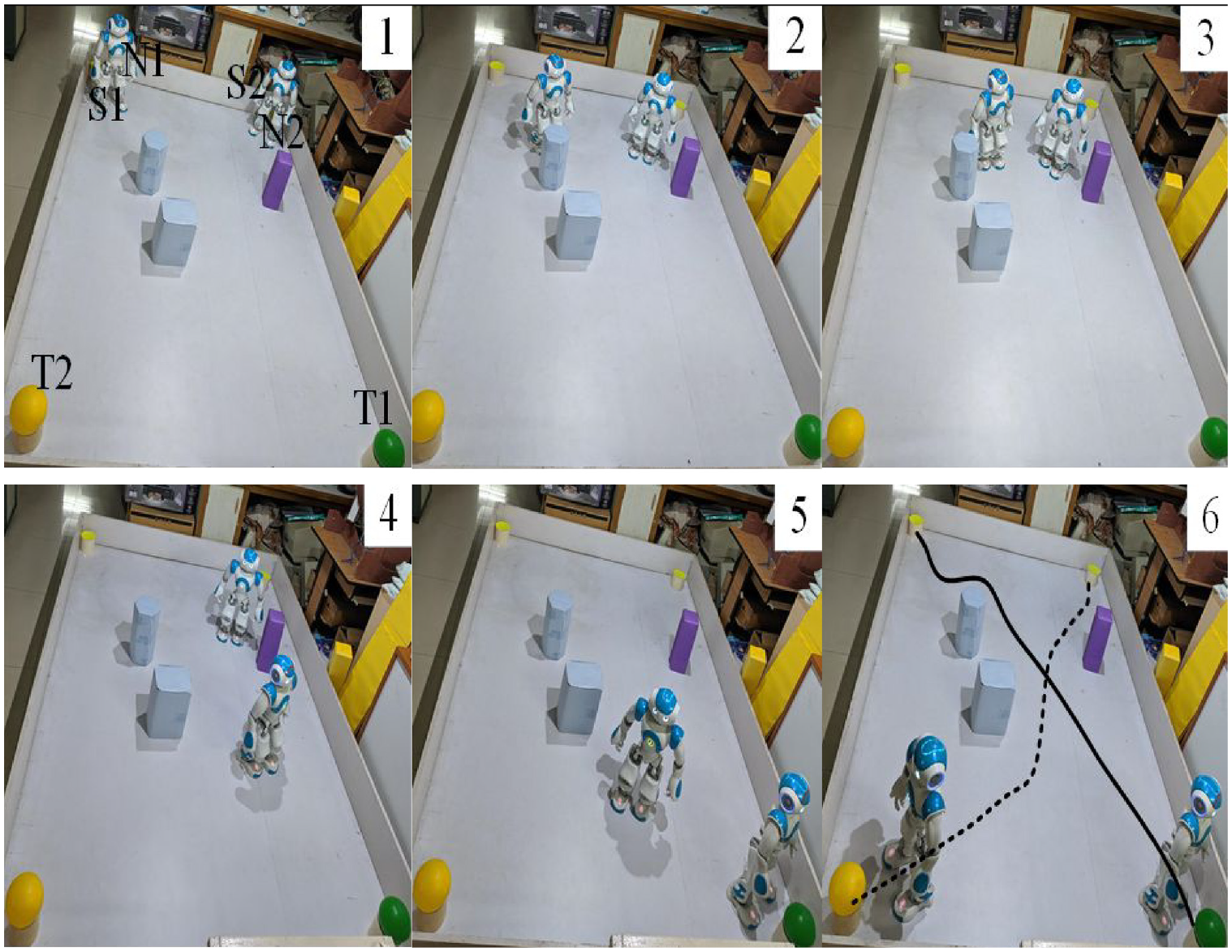
Experimental results of multiple humanoids traversing through a cluttered environment.
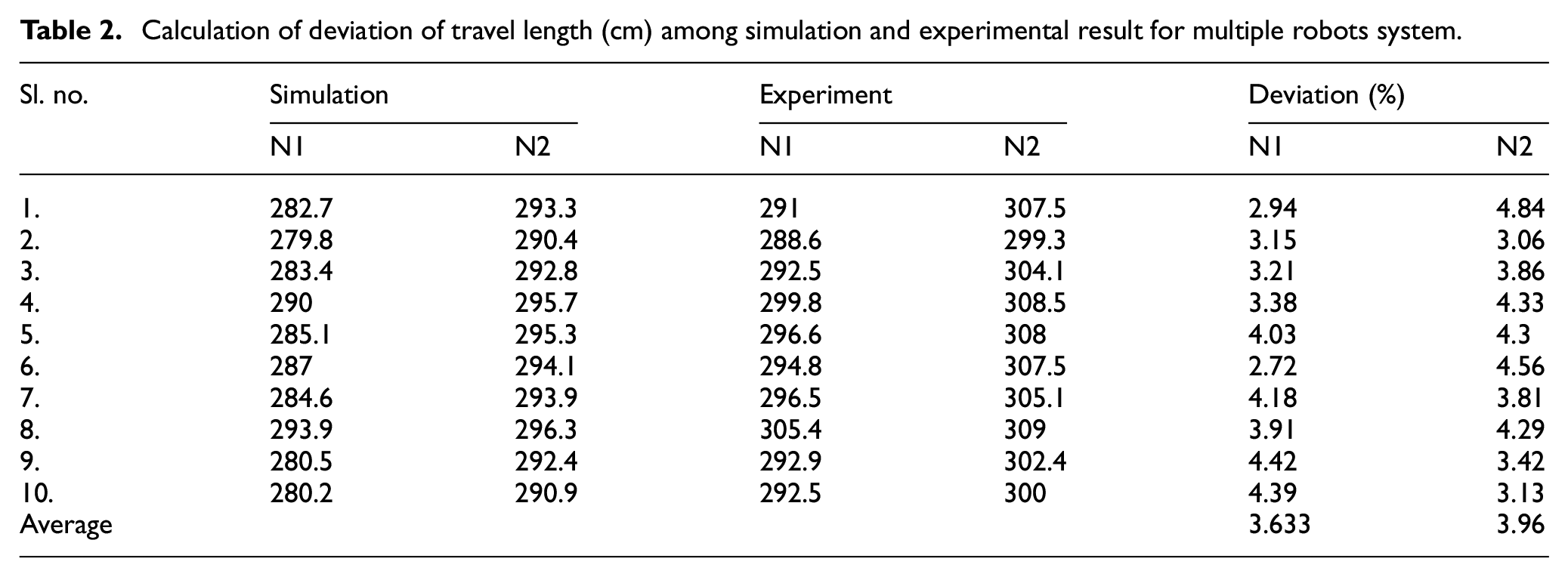
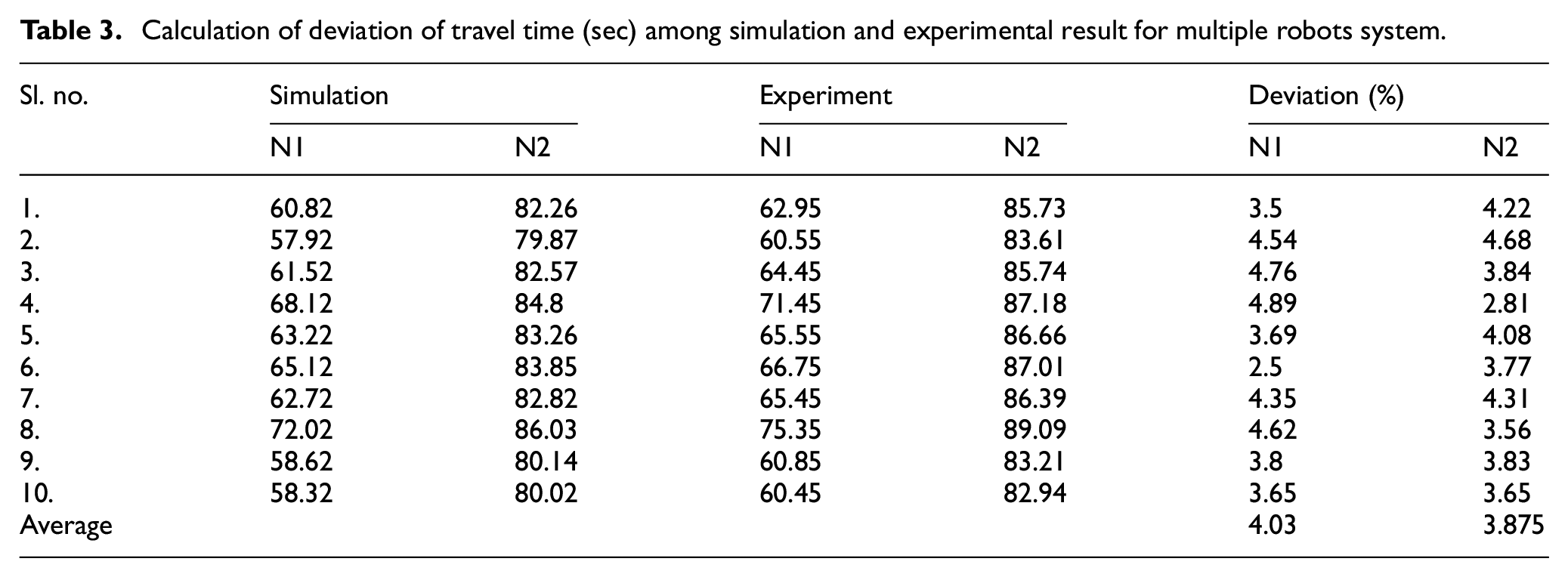
Tables 2 and 3 show the data obtained from the implementation of the proposed approach in multiple robots in terms of travel length (cm) and travel time (s), respectively. The deviation is recorded under 5% between simulation and experimental results, which shows an acceptable relation between them. The implication of the proposed technique shows a robust result while working in a single robot and also a multi-humanoid system.
Calculation of deviation of travel length (cm) among simulation and experimental result for multiple robots system.
Calculation of deviation of travel time (sec) among simulation and experimental result for multiple robots system.
Comparison with the existing technique
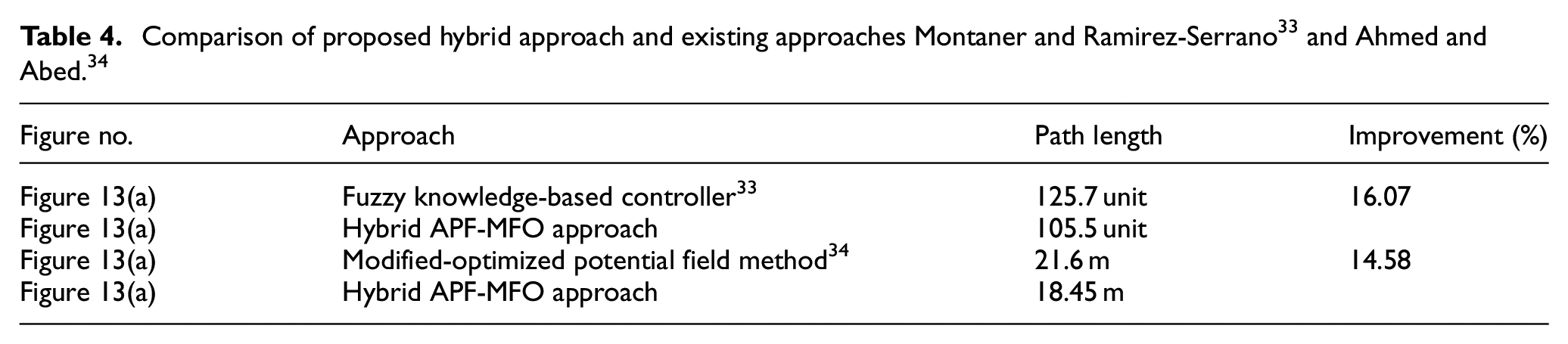
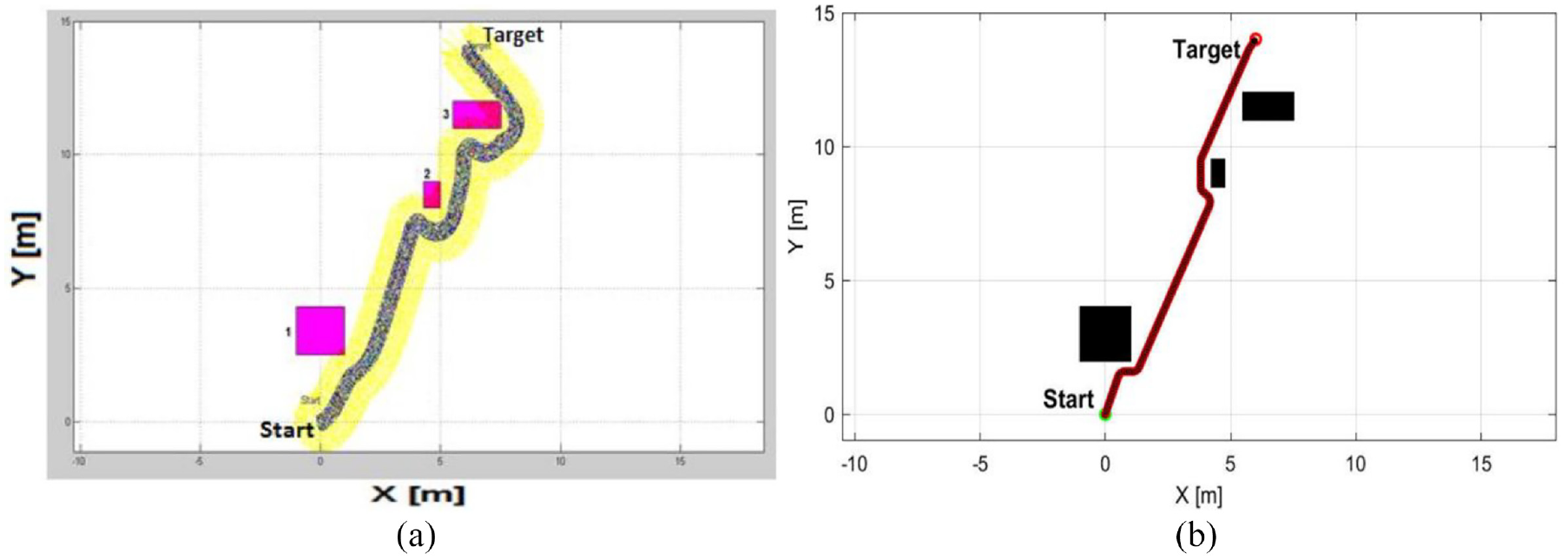
The proposed approach has performed well and shows acceptable results. The robot achieves the goal by averting the obstacles which come in its path. The robustness of the presented approach would be checked in this section by comparing it with the previously existed approach. The robot has been tested in the same environment used by Montaner and Ramirez-Serrano. 33 The terrain has been designed with proper care for correct comparison. The robot is both the terrain reaches the target, but the robot feed with the proposed approach reaches the target with lesser path length. The snapshot of the navigation is displayed in Figure 13, and a comparison with the path length is enlisted in Table 4. The improvement of 16.07% has been recorded while implementing the proposed approach. The proposed hybridized technique performs efficiently in the given environment and takes relatively lesser time than previously used navigational strategies. This improvement defends the selection of the proposed approach. This technique is further examined on the basis of other algorithms to find the robustness of the proposed controller. Ahmed and Abed 34 have implemented Modified-Optimized Potential Field Method for navigation tasks. The environment consists of three obstacles and a start and target point (displayed in Figure 14(a)). A similar environment is designed precisely to demonstrate the effectiveness of the proposed controller (displayed in Figure 14(b)). The robot starts moving towards the target and takes a smooth turn to avoid the first obstacle and heads towards the target.
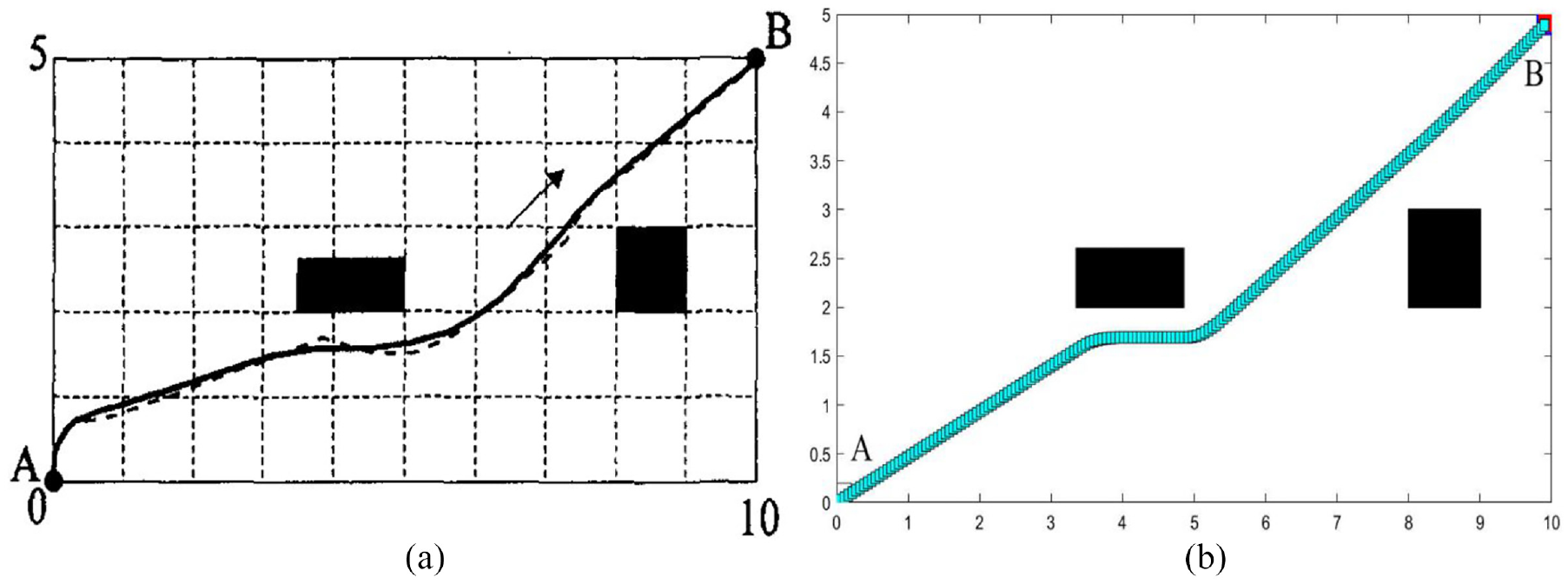
Comparison of path length between and proposed approach. (a) Path traced using fuzzy knowledge-based controller. 33 (b) Path traced based on the proposed hybrid APFMFO approach.
Comparison of path length between and proposed approach. (a) Path traced using modified-optimized potential field method. 34 (b) Path traced based on the proposed hybrid APFMFO approach.
In the path, it encountered the second obstacle and avoided it by taking a turn in the left direction rather than in the right. It makes the trajectory simpler and decreases the computational effort. The path length from both environments is recorded and compared in Table 4. It displays an acceptable improvement in path length, which proves the robustness of the proposed controller.
Conclusion and future discussion
A novel hybrid technique has been implemented in this paper to obtain the optimum travel length.
The proposed technique has been implemented in terrain having a single humanoid robot and multiple humanoid robots.
In the multi-humanoid system, the chance of inter-collision could appear, which has been solved by implementing a dining philosopher controller in the proposed technique.
The effectiveness of the proposed controller is examined in reference to the standalone controller. The convergence curve shows its effectiveness over others.
Simulation and experimental results show that the humanoid robot avoids the collision with the obstacles and achieves the target and displays a good relation between them with deviation under 5% for both single-humanoid system and multi-humanoids system.
The humanoid performs relatively better than the Fuzzy knowledge-based controller and Modified-Optimized Potential Field Method when the hybridized navigational strategy is being used. It displays an improvement of 16.07% and 14.58%, respectively, in travel length.
The correlation between the simulation and experimental result and the improvement in travel length, when compared with the existing approach, shows the supremacy of the proposed approach.
The humanoid is able to comprehend the methodology used, and further techniques can be used in combination with the applied techniques. The proposed technique may be implemented on uneven terrains with few enhancements in the footsteps of the humanoid robot.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.