
Abstract
The use of mobile manipulators for transportation tasks has provided solutions to several flexibility problems in manufacturing systems. Mobile manipulators are mobile entities equipped with robotic arm for loading and unloading of parts and an Automated Guided Vehicle (AGV) for their transport. In order to increase further the flexibility of these systems, the mobile manipulators could be modular, where their two entities are able to work together or separately. The assignment of transportation operations to different smart entities working together is a complex problem, which has not been addressed sufficiently in the literature. This paper proposes a two-stage decision approach for transportation task assignment, which is based on auction mechanism and a coalition formation process modeled with integer linear programming. A real use case has been implemented to test the efficiency of the proposed method. The proposed approach gives promising results that are discussed.
Keywords
Introduction
The paradigm of mass production in factories was initiated by Henry Ford at the beginning of the 20th century on an assembly line. These lines have good yields, when it comes to producing the same part and when market demand for that semi-finished or finished-product is high. 1 The current market trends need more variable and customized product, which cannot be ensured by these traditional production lines. The integration of Flexible Manufacturing Systems (FMS) is a solution to cope with these changes.2,3 The conveyor systems used for transportation tasks are no longer suitable for FMS, especially with the requirements of routing flexibility. 4 Thus, in the Handling Material System (HMS), mobile manipulators are used to ensure transportation tasks to be able to execute a full transportation task composed at least by three elementary operations (loading products on mobile robot, transporting the product to destination and unloading product from the mobile robot). 5 In order to increase the flexibility of such devices, the European project CoRoT proposes to develop a modular mobile manipulator composed of two intelligent elements (a robotic arm and a robotic mobile base) able to be separated and gathered in a short time. Several studies have focused on different problems related to the implementation of mobile manipulators in manufacturing systems,6,7 optimize the robots fleet size using a multi-agent based simulator, 8 seek to find the optimal size of robots and propose a multi-load strategy to increase the effectiveness of robots. The path planning is an important problem studied by several research work for single or multi robots systems. The selected path in complex systems affects directly the duration of the transportation,4,5,8 is interested by the energy management of mobile robots and the optimisation of the charge station placement, knowing that the idle state can be considerable for this kind of device. Other researches focus on the assignment of tasks to manipulators.9,10 All these works are considering the transportation task as global task without looking to the different operations composing it and the associated resources needed to execute them (AVG, arm, gripper and/or operator).
At the best of our knowledge, no research work has examined the execution of the transportation task using modular robotic systems or the fact that the task is executed by the coalition of several autonomous entities. In fact, the literature considers mobile manipulators with a simplified role (moving a product from point A to point B) by neglecting the arm role (Loading and unloading operations). This paper assumes that the transportation task is executed by a set of resources (AGVs, robotic arms and human operators) and seeks to optimize robot teams composition. It proposes a distributed decision process allowing to use effectively the smartness of mobile manipulators entities through the robots coalition formation.
The remainder of this paper is organised as follows. The second section gives an overview of the literature and reports the most relevant works in the fields of mobile manipulators, robots coalition approach and robotic tasks assignment. Then, Section 3 describes the proposed distributed decision approach and details the global and local decision models. A use case and its experimental results are presented in Section 4 to illustrate the effectiveness of the proposed approach. The last section gives the main conclusions and perspectives of this work.
Related works
Mobile manipulators
Mobile robots are autonomous entities able to move in a given space to displace products, tools or measurement devices from a source point A to a destination point B. Usually, they are connected and have several perception sensors used for localisation, safety and obstacle avoidance. 11 They are used in several fields such as manufacturing systems,12,13 military operations, 14 medical care systems, space exploration, 15 etc. In the industrial field, these robots are called AGVs (Automatic Guided Vehicles). By equipping it with a robotic arm for loading and unloading operations, an AGV becomes a mobile manipulator.5,11 The modularity criterion of mobile manipulators means that they can be divided into two categories (I and II).
Category I Mobile manipulators
In this case, the mobile base is linked physically to the robotic arm and the two entities are considered as a single entity. 11 Communication is done through a single controller that has several actuators (motors of the mobile robots and robotic arm). This configuration is quite widespread, especially when centralized supervision is adopted. This kind of architecture is efficient but limits the flexibility of the system because the two entities can work only together, that is, if one of them is implicated in a task, the other one is also implicated since they are physically dependent. Other distributed architectures are developed in order to overcome this problem, where the robots are considered as two distinct entities. 16 In this case, the communication with the supervision system can be made separately or together through a specific controller dedicated to the synchronisation of the two robots. This architecture reduces the complexity and the amount of communication data of the supervision system.
Category II Mobile manipulators
In this case, the mobile base is physically separated from the arm and the two entities (mobile base and arm) are considered as two different autonomous entities, each of which has its own decision-making unit. 17 This configuration is beneficial when the mobile base does not need the services of the arm, as in cases where loading/unloading operations are carried out by a human operator or another arm more efficient. The category II is necessary also when the arm needs the service of the mobile base to be transported in a given location where the arm has to perform a handling operation (pick and place). 18 The communication with the supervision system is similar to the case where the robots are linked, but they are still considered as independent entities. The unique difference in this case is that the coalition can include more than two robots.
Robots coalition
A robotic coalition can be defined as a group of robots, combining their capacities in order to execute a task that each of them cannot execute lonely. 19 Many research works have focused on robots coalition formation which is known as NP-Hard problem. 20 In Rauniyar and Muhuri, 21 a multi-robot coalition problem is addressed and a centralized approach, based on genetic algorithm, is used to solve it. A central robot, which has knowledge about the other robots, leads the coordination between robots to perform tasks. However, the model remains generic since it does not specify the nature and the complexity of tasks. In Wu et al., 22 a hybrid approach for multi-robots coalition is used for delicate tasks (rescue missions or dangerous environment). The method aims to maximize the number of tasks completed by the coalition while minimizing the energy consumed. Another multi-robots coalition algorithm in the same application field (rescue missions) is shown in Mouradian et al. 23 Several constraints such as battery level, task capability requirements and location constraints are taken into account in the coalition formation. For example, based on the possible duration of a task, a minimum battery level can be required to integrate the group (or coalition). The number of robots that can be part of a given coalition is also limited. This limitation could be a disadvantage for other areas such as in industry, which may include tasks requiring the intervention of several resources in the same time. Thus, this constraint restricts the use of the approach in other application fields.
Robotic tasks assignment
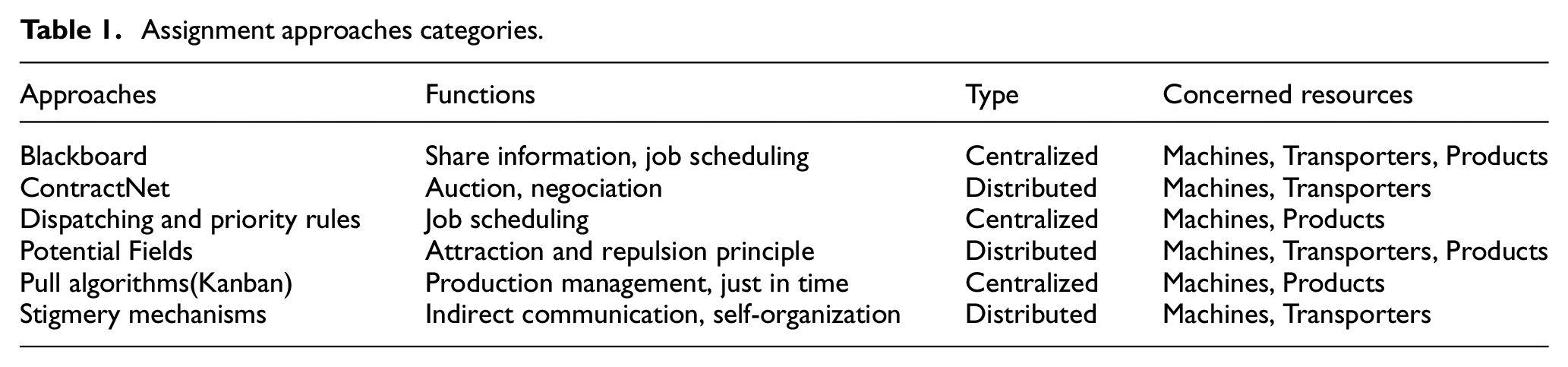
Robotic tasks scheduling defines the responses to the questions “when,”“where” and “how” a robot must perform each task, including its routing. 8 A high-level entity is generally in charge of the scheduling decisions in order to achieve and ensure the overall objective(s). 24 However, with the advent of autonomous entities able to execute high-level orders, the “how” question is treated locally at the bottom level (shop floor), in order to gain in flexibility and reactivity. 25 Two types of scheduling are used: (i) Offline scheduling, when all transportation tasks and parameters are known in advance; and (ii) Online/Dynamic scheduling, when transportation tasks to schedule come separately and the scheduling is dynamically adapted over time.26,27 Several works were interested in tasks assignment of smart transport entities in an industrial environment. Nevertheless, most of that works limit transport entities to AGVs.9,15 As a result, only the transportation operation is taking into account, the operations of loading and unloading are neglected. Rey et al. 28 categorized the assignment approaches into six groups which are summarized with their characteristics in Table 1.29,30
Assignment approaches categories.
The six approach categories are implemented using either Multi-Agent System (MAS),
31
Holonic Manufacturing System (HMS)
32
or Product Driven (PD).
33
Each approach is characterized by its
Among the assignment approaches presented in Table 1, ContractNet and Potentials Fields are the most commonly used because they are more suitable to mobile manipulators tasks assignment. In fact, these approaches offer a possibility of direct communication between agents, a distributivity to take into account their intelligence and include transport resources (transporters) in their field. Hence, these two approaches are explained in more details hereafter.
Potential fields
Potential Fields approach consists in the emission of a field into an environment in order to attract elements of common interest (Attraction) or to repel in order to avoid each other (Repulsion). 34 In Weyns et al., 35 an approach for assigning tasks to AGVs in a dynamic environment based on Potential Fields is proposed. Fields are emitted by transport agents and then idle AGVs are attracted by these fields. AGVs in turn emit repellent fields to avoid collisions when several AGVs are attracted by the same field. A priority index ranging from 1 to 10 is defined for each transportation task to better guide AGVs in selecting a task, when several fields are transmitted at the same time. In Zbib et al., 36 another approach based on Potential Fields, in which each resource can offer one or more services, is proposed. Each service having its own potential field, the same resource can emit several potential fields corresponding to the services it is offering. The products are then attracted by the field corresponding to the service they need. Therefore, approaches based on potential fields make it possible to solve scheduling and routing problems simultaneously. 37 However, the field flow is proportional to the distance where the emitting source is located. That is why, these methods reach their limits in large warehouses or factories, especially if there are obstacles like walls, for example. In other terms, the use of these approaches in an efficient way requires a particular configuration of the environment (open and relatively small space).
ContractNet
Methods based on ContractNet approach are known to be effective in solving allocation problems. 37 In this type of approach, a manager agent announces a proposal for a job, contracts agents, evaluates their offers and then bids. 38 Then, the manager agent assigns the task and coordinates with the winner to perform the task. Three situations can arise in FMS:
(a) Contractors and managers are all resources trying to distribute the workload. 34
(b) Managers are parts offering tasks and contractors are bidding resources to get these jobs. 39
(c) Managers are resources offering services and contractors are parts using these services. 40
In Hernandez-Martinez et al., 4 an auction-based assignment method is presented, where AGVs bid to obtain the transport of a given product. The allocation is made based on the characteristics of each AGV in terms of location, capabilities and execution time. Other decision criteria can be defined for the choice of the AGV, such as power consumption, accuracy, and some characteristics related to the nature of the products. In this approach, tasks are allocated sequentially, 36 which needs a scheduling of tasks before the allocation process. The use of combinatorial bidding in Fauadi et al. 9 allows to overcome this type of problem. Thus, a mobile entity can submit, at the same time, several bids to production tools, in order to win the tasks of transporting products they offer.
Distributed decision
An industrial transportation task can be defined as a set of three primary operations: Loading an object at source point A, moving this object to a destination point B and unloading this object. The assignment of transportation tasks to mobile manipulators can be done in several different ways. In the most common way, only the operation of moving the object is considered, whereas loading and unloading operations are not taken into account.35,41 This can lead to inaccuracy in delivery time calculations. In this first one, the task allocation consists in finding an AGV able to perform the task according to various parameters, such as cost, time, distance, etc. Another approach, more complete but rarely used due to its complexity, takes into account all three operations for a better estimation of delivery times and associated costs. 18 The assignment will then consist in determining the entity or the collection of entities able to perform the three operations. Three possibilities can be presented.
First, the supervisor finds, directly at its level, the best (optimal) coalition for the execution of a given task. This approach is totally centralized, which leads to a fast response of the system, a centralization of data, and a high control on bottom entities. 24 However, the flexibility of the system is highly reduced and the smartness of entities is underused.42,43
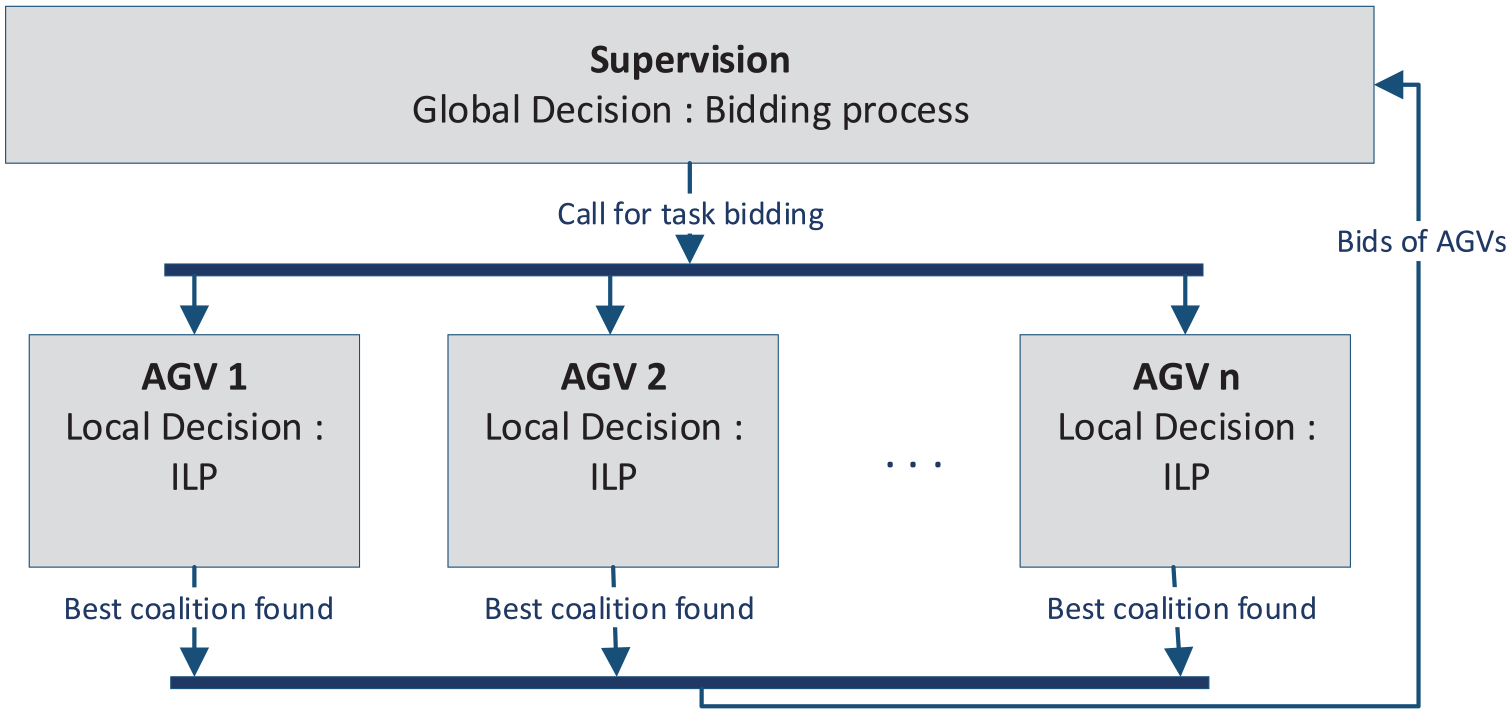
The second possibility reduces supervisor’s workload by taking advantage of the autonomy of mobile manipulators.25,44 In Pach, 45 this decentralized approach is experimented. The high-level entity defines the production plan through an Integer Linear Programming (ILP), and the bottom-level entities are in charge of assigning tasks to to resources based on Potential Fields approach. In this paper, our approach is based on a similar concept for the assignment of transportation tasks to a set of resources. As shown in Figure 1, the supervisor submits a task to all AGVs and each of them find and submit to the supervisor the coalition that best fits the task. Then, the supervisor chooses the best coalition received from the AGVs. The supervisor’s decision is global and is based on an auction process, while each AGV’s decision is local and is based based on an ILP. This two-stage mechanism makes the approach distributive since the decision is shared between the different entities of the workshop (supervisor and other low-level resources, AGVs).
Transportation tasks assignment process.
Notations
Sets and indices
v index of AGVs, each AGV is in charge of the local decision (coalition formation)
k Index of tasks, each task is composed of a set of operations
i Index of operations,
r Index of resources,
Parameters
=
Decision variables
Global decision
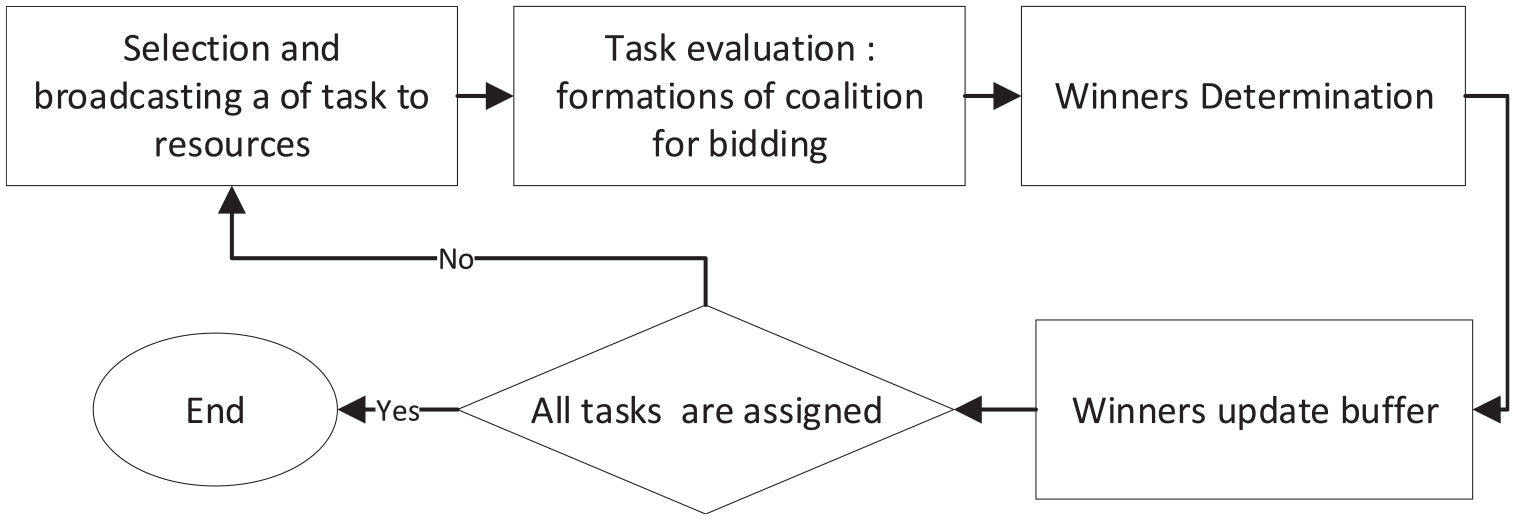
The goal of the global decision is to ensure that the optimal coalition of robots is selected for each submitted transportation task. The global decision model is based on an auction process in which the supervisor, representing the high-level entity, submits a transportation task and receives bids from AGVs. As shown in Figure 2, the global decision entity selects and sends a task to AGVs in charge of coalition. The latters respond by proposing the coalition minimizing the task completion time through a local decision model based on an ILP. The selection of one winner by the global decision is done as formulated in equation (1). The winner is the AGV in charge of the coalition minimizing the delivery time of the task, which corresponds to the sum of the task duration (

Auction process.
with
Once a winner is selected, the supervisor sends the information to the members of the winning coalition in order to update their buffers for the next tasks.
Local decision model formulation
The ILP-based local decision model is implemented on each AGV. It aims to find the best coalition of resources, while minimizing the completion time of the whole transportation task. A coalition is necessarily formed by: (i) one AGV in charge of carrying the product and leading the coalition;
(i) One robotic arm joined to an AGV able to carry out both the loading and the unloading operations;
(ii) Two different robotic arms (Each of them is either joined to another AGV or separated);
(iii) One human operator able to carry out both the loading and the unloading operations;
(iv) Two human operators (one for the loading operation and another for the unloading operation).
The number of possible coalitions for each AGV can be calculated using the expression below:

where |.| is the cardinality operator,
The number of possible coalitions for each AGV can be very large due to combinatorial explosion, hence the necessity of using efficient approximate algorithms allowing to partially explore the solutions’ space and then select the best one. 46
Assumptions
The following assumptions are considered to construct our model:
(A1) The workshop configuration is defined and cannot be changed. Assembling or disassembling a mobile manipulator (AGV + robotic arm) has already been done at the tactical decision-making level, that is, deciding these actions is not made at this level. However, even if a given robotic arm is already joined to an AGV, it might be part of a coalition that is led by another AGV.
(A2) Only AGVs are in charge of the coalition formation.
(A3) Each AGV can transport only one product at a time and has enough space to carry any type of product, even when equipped with a robotic arm.
(A4) Each AGV keeps the location where it executed the previous transportation task’s last operation (unloading operation) until starting the following transportation task, without hindering the movement of other AGVs at that location.
(A5) The robotic arms already joined to AGVs are considered as a mobile arms and have variable locations. The other arms are considered as immobile arms, which are assigned to specific locations that cannot be changed.
(A6) The operators can perform only pick and place operations and are considered as immobile arms, that is, assigned to specific locations.
(A7) Each robotic arm and each human operator has its/his own payload limit, that is, the maximum weight it/he can safely handle.
(A8) The picking and placing locations of products are known and correspond to the locations of different stocks raw materials’ stock(s), machines’ input and output buffers and finished products’ stock(s)). The machines’ input and output stocks are considered at the same location of the machine.
Mathematical formulation
The local problems of choosing the best coalition for each AGV, for each transportation task, can be mathematically represented by the following generic optimization problem.
For a given AGV v and a given transportation task k, the corresponding optimisation problem can be formulated as follows:





The objective function (3) minimizes the duration (completion time) of the transportation task of the current bidding and, consequently, the delivery time of the product. The constraint (4) ensures that each operation composing the task can have only one winner. The resources in charge of operations must meet the physical requirements, such as the function required (transport, pick, and place, etc.), and/or the type of end-effector, and/or the minimum payload, etc. For example, a given AGV might not be able to satisfy a pick and place function, but only a carrying function like all other AGVs. Moreover, human operators, like robotic arms, can only satisfy a pick and place function. This condition is expressed by equation (5). As shown in equation (6), to perform an operation, a resource must also be located at – or able to reach – the position where the operation takes place. The set of constraints represented by equation (7) ensures that immobile resources that are not located where a given operation i takes place (
Research validation
Use case description
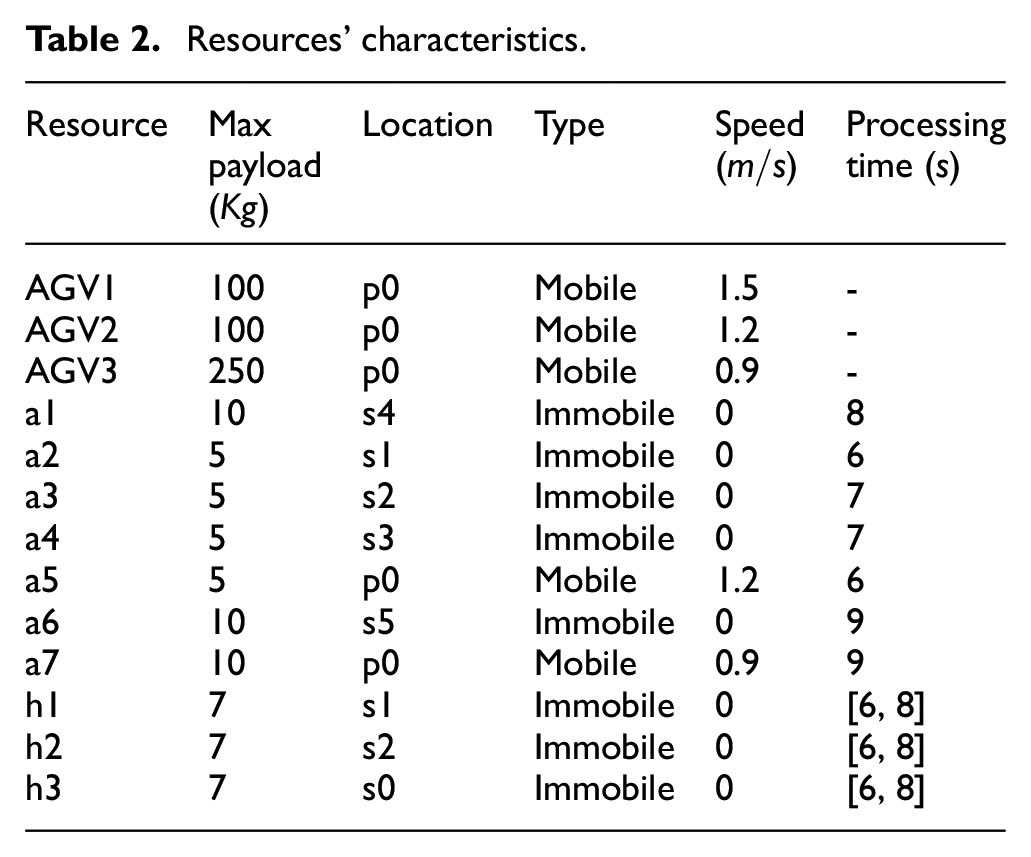
The Figure 3 describes a real workshop of LINEACT laboratory composed of four manual assembly workstations. The objective is to assemble tricycles and then transfer them to the finished-products stocking zone of the workshop. Thus, three AGVs (Two MiR100 and one Robotnik) are in charge of transferring products from different workstations. In order to assemble a tricycle, eight transportation tasks (task1,. . . , task8) have to be made. The first four tasks aim to supply the workstations (
(i) the maximum payload : maximum weight the resource can handle;
(ii) the type: mobile, or immobile;
(iii) the location: physical coordinates (time-varying for mobile resources);
(iv) the speed : moving rapidity for mobile resources (when changing location), or zero for immobile resources. The mobile arms take the speed of the AGVs to which they are attached.
(v) the processing time: the time needed by a resource to complete one handling operation (loading or unloading).
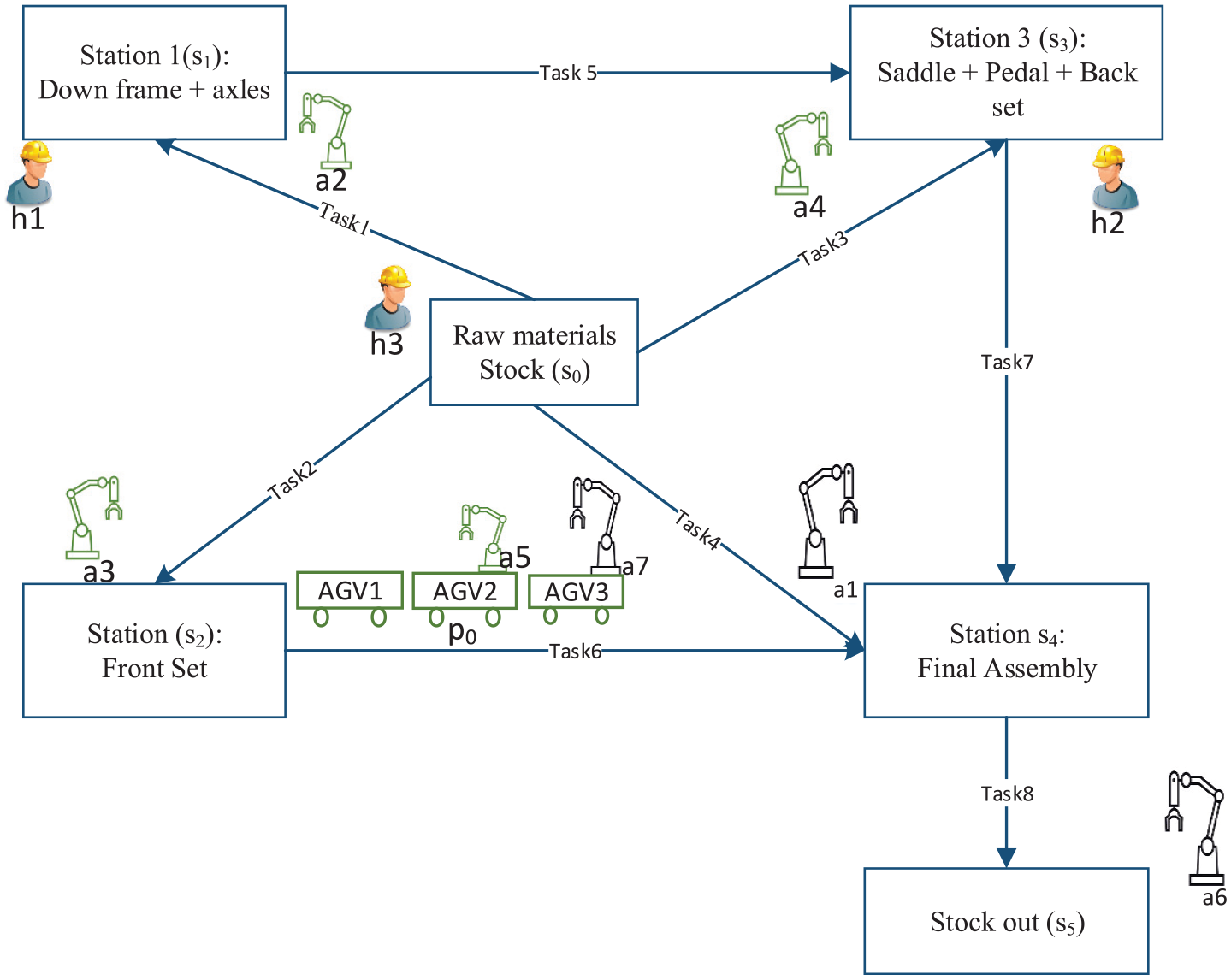
The workshop layout, resources and transportation tasks of one tricycle assembly process.
Resources’ characteristics.
Results
The local decision model, proposed in the previous section, has been developed under Python programming language. The problem is solved by an integer linear programming based approach using “Google OR-tools for Python” library. Table 3 summarizes the assignment of the eight tasks, by providing the requirements of each task, and the associated results of resources allocation. Thus, each AGV provides the best coalition, that minimizes the task duration, after resolving the corresponding ILP. The winner between the proposed coalitions is the one minimizing the task delivery time. Thus, a coalition can provide the lowest task duration without being the winner. This is the case for task 6 with the coalition proposed by AGV1, which provides the lowest task duration, but not the minimum delivery time. Thus, the task 6 is assigned to the coalition of AGV3 with h2 and a1. The selection of the minimum delivery time leads to a reduced makespan. In the assignment of some tasks (task 7 and task 8) the AGVs propose the same teams. This demonstrates the efficiency of the local decision model. The resources are chosen for their abilities to meet tasks requirements and also for their performances in terms of speed and/or processing time.
Result for an instance with eight tasks.
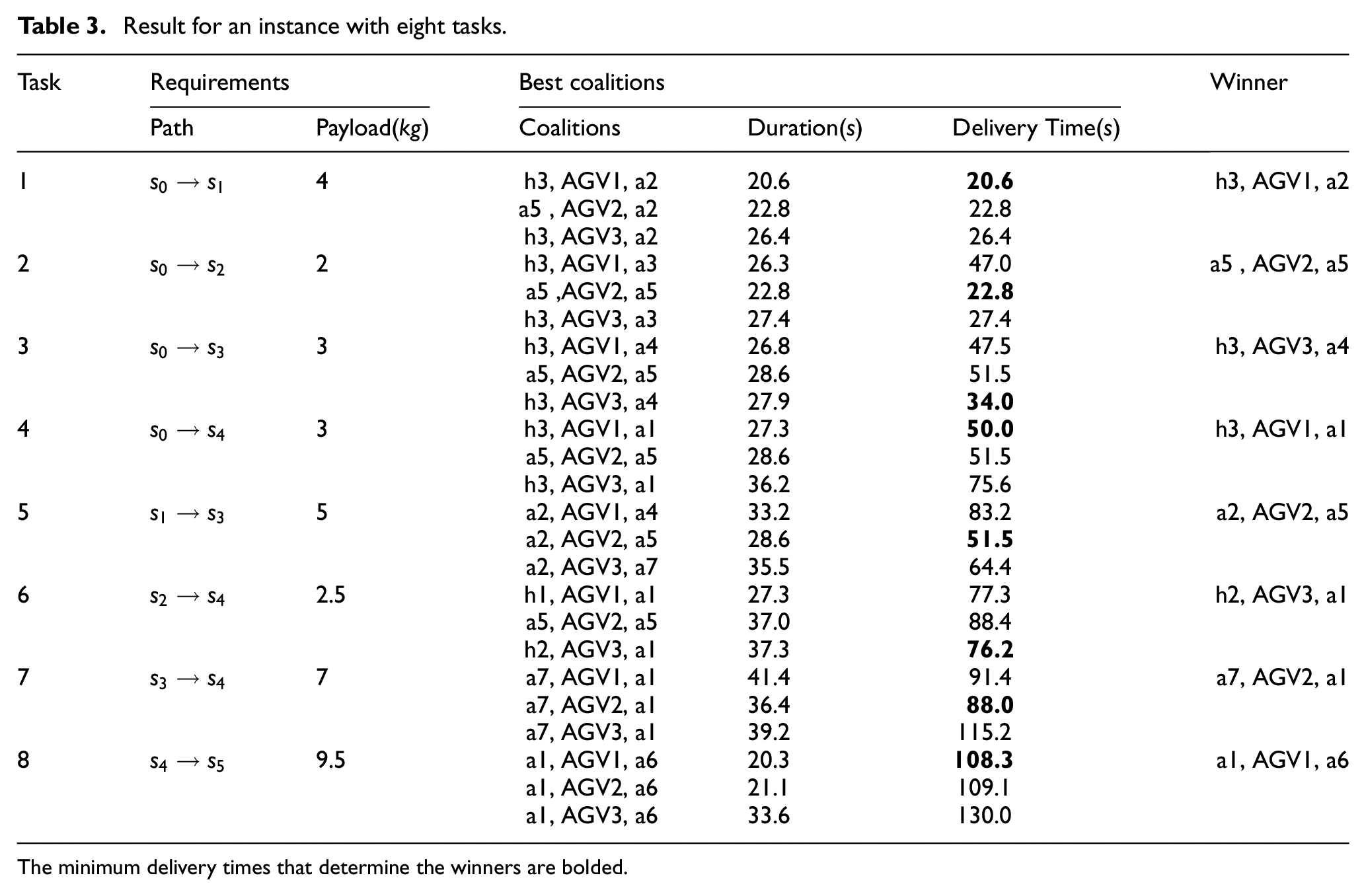
The minimum delivery times that determine the winners are bolded.
The coalitions formed by the AGVs with the associated times are presented in Figure 4. It is a Gantt chart illustrating the schedule of transportation tasks won by each AGV, while denoting on each task the resources selected for loading and unloading operations. Firstly, we observe that some resources belong to several coalitions at the same time. In fact, being part of one coalition does not prevent a resource from participating in another one, as long as the associated time periods do not overlap. For example, the operator h3 belongs to both coalitions, led by AGV1 and AGV3, that are in charge of task1 and task3, respectively. As it can be seen, h3 starts the loading operation of task3 only after finishing the loading operation of task1. Moreover, we can observe that a loading or unloading operation (colored in cyan and yellow, respectively) can have a large time duration (
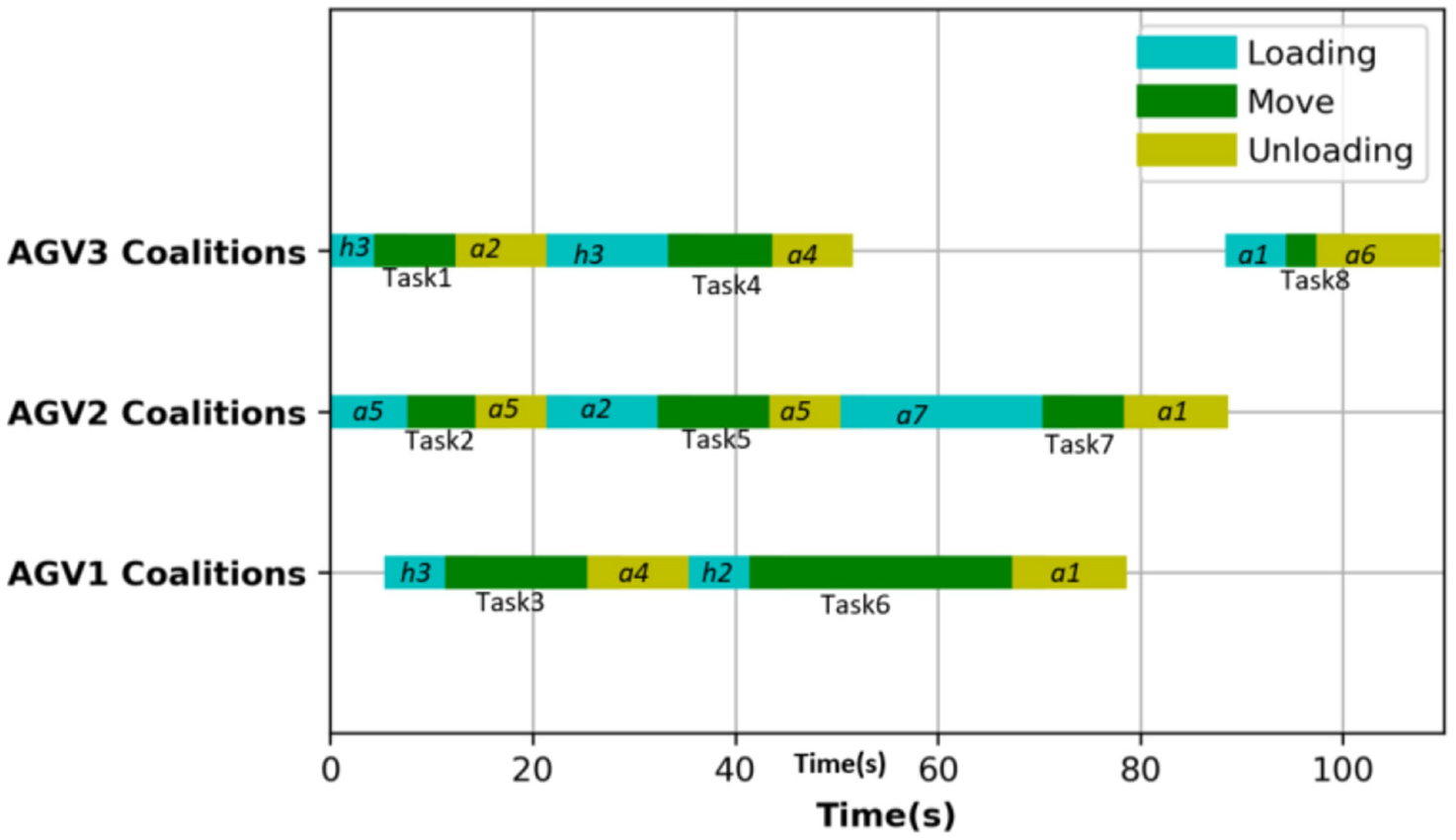
Coalitions in charge of tasks.
Based on the participation of robots in different coalitions, this approach, designed for operational decision-making level, can also be used for tactical decisions via simulation. Thus, the resources that do not participate in any coalition could be removed or reconfigured to be used for other tasks or applications in the factory. For instance, the operator h2 intervenes only once and the robotic arm a3 is not part of any winning coalition.
Clearly, the removal of inactive resources, such as a3, will not affect the system, whereas the removal of the resources which intervene at least once, such as h2, could impact the overall completion time. An experimental comparison provides the following completion times:
Regarding resources utilisation criterion, it is interesting to observe the number of deployed resources in a coalition to perform a task, as shown in Figure 5. This number, denoted by N, allows to check the correctness and, in some way, reflects the efficiency of chosen coalitions. In fact, N must always be greater than two for any task since it requires at least two entities: a pick and place resource and a transportation resource. The number N also indicates the manner the task is performed and the nature of the selected resources. When N is greater than 3, it implies that at least one resource within the coalition is uselessly included because it is physically joined to another resource that is actually used in the coalition. For example, for task2, N is equal to 2, which implies that the AGV leading the coalition is using the on-board arm for loading and unloading operations. On the opposite, the coalition formed for task7 mobilises 5 resources which are: a7 (for loading), AGV3 (joined to a7) AGV2 (for moving), a5 (joined to AGV2), and a1 (for unloading).
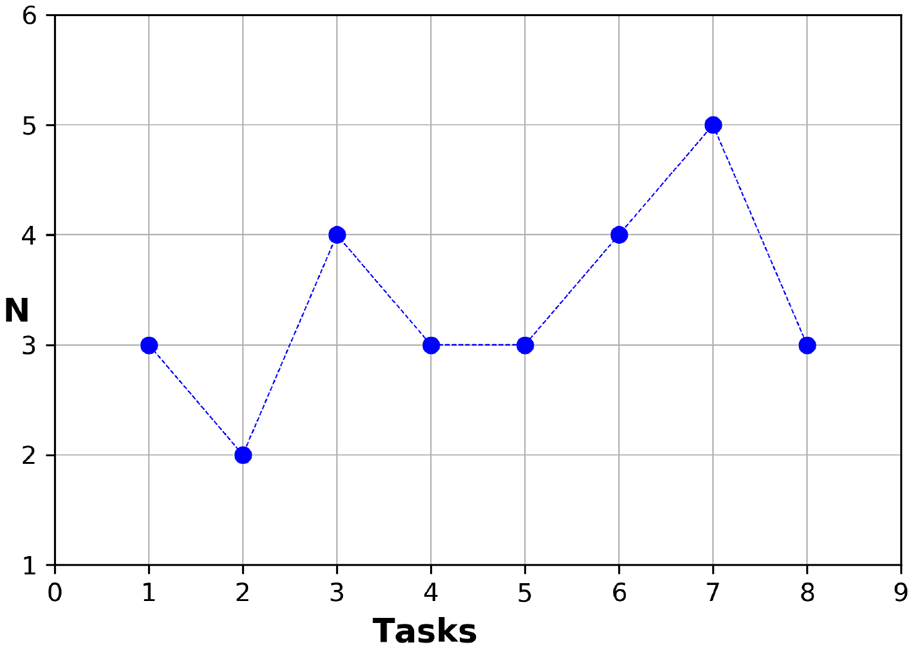
Number of deployed resources per task.
We also simulated a production run of a batch of 10 tricycles, using the proposed transportation tasks assignment approach. Figure 6 shows the total distance travelled by the AGVs as a function of the number of tricycles assembled. Note that the assembly of a tricycle requires eight transportation tasks (c.f. Figure 3). We can observe that the distances travelled by the AGV1 and AGV2 are both significantly greater than the distance covered by the AGV3, especially as the number of assembled tricycle increases. Indeed, the first two AGVs win more tasks, as they have much smaller execution times due to their higher speeds (
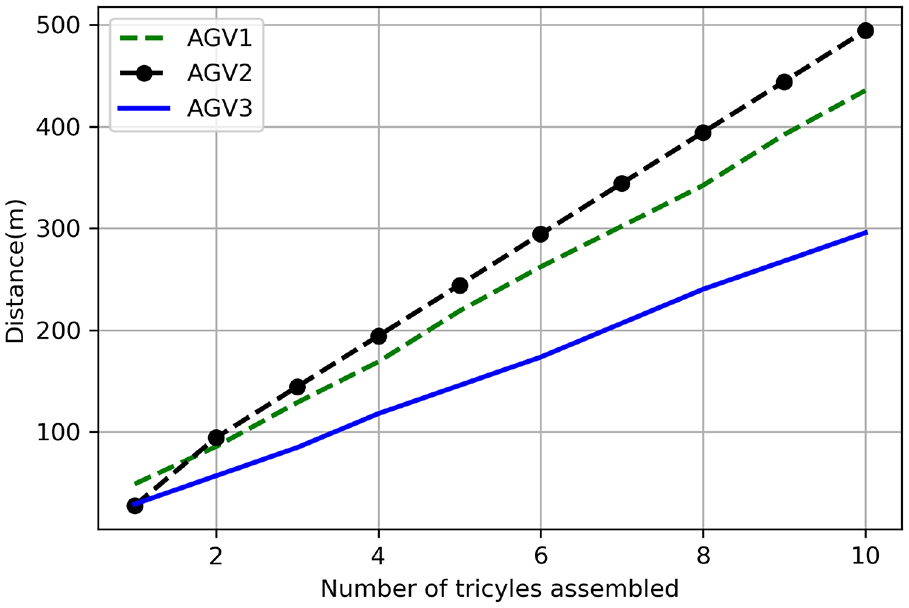
Distance travelled by AGVs for ten tricycles assembly.
Conclusion
This paper deals with the problem of task assignment for modular robots in flexible manufacturing systems. The modularity of mobile manipulators allows them to be more flexible, but makes their control and task assignment more complicated. By using the concept of resources coalition, we propose a two-stage decision-making process to solve the problem. In the first stage, an ILP-based local optimisation process allows the master resources (AGVs), at the bottom level, to select the best coalition that satisfies the required capabilities for each task. In the second stage, a set of robots (a coalition) is selected at the high-level for each task, based on an auction process, where the bids come from the bottom level. A realistic case study was used to test the proposed approach and the obtained results show its applicability and efficiency.
Our future works will focus on the introduction of dynamic reconfiguration (assembly and disassembly) of mobile manipulator entities (AGV and arm) in the proposed method. We project also to enrich our model by taking into account more realistic constraints and performance criteria, such as delivery due dates, quality, machines buffers capacities, robots batteries capacities, energy consumption, congestion, maintenance, etc. Finally, it will be worthwhile to consider how the approach can be adapted to face disturbances and render the manufacturing system more efficient and more resilient.
Footnotes
Acknowledgements
This research was made possible thanks to €2.6 million financial support from the European Regional Development Fund provided by the Interreg V France Channel England Programme in context of CoRoT Project.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.