
Abstract
Feature recognition is an important technology of computer-aided design/computer-aided engineering/computer-aided process planning/computer-aided manufacturing integration in cast-then-machined part manufacturing. Graph-based approach is one of the most popular feature recognition methods; however, it cannot still solve concave-convex mixed interacting feature recognition problem, which is a common problem in feature recognition of cast-then-machined parts. In this study, an oriented feature extraction and recognition approach is proposed for concave-convex mixed interacting features. The method first extracts predefined features directionally according to the rules generated from attributed adjacency graphs–based feature library and peels off them from part model layer by layer. Sub-features in an interacting feature are associated via hints and organized as a feature tree. The time cost is reduced to less than
Keywords
Introduction
Feature recognition is to extract and recognize form features of a three-dimensional (3D) computer-aided design (CAD) part model. The feature recognition results are helpful to product designing,1–3 process planning,4–10 and numerical control (NC) programming.11–17 Thus, it is regarded as the premier technic for the integrated representation of product lifecycle data. 18 With the popularization of digital manufacturing and intelligent manufacturing, feature recognition has been implemented in manufacturing reuse 19 and NC machining 13 of aircraft structural parts, automatic process planning of mold components 4 and V-bending, 8 and construction of 3D working procedure model. 9
Feature recognition is also a primary method required to extract the features need to be machined after casting in spacecraft structure part manufacturing. The cabin structure in spacecraft (refer to Figure 1) is a cast-then-machined part with more than 120 features which belongs to over 10 categories. The machining features include isolated concave features, isolated convex features, and interacting features. Most of the interacting features are concave-concave interacting features (A in Figure 1) and concave-convex interacting features (B, C, D in Figure 1).
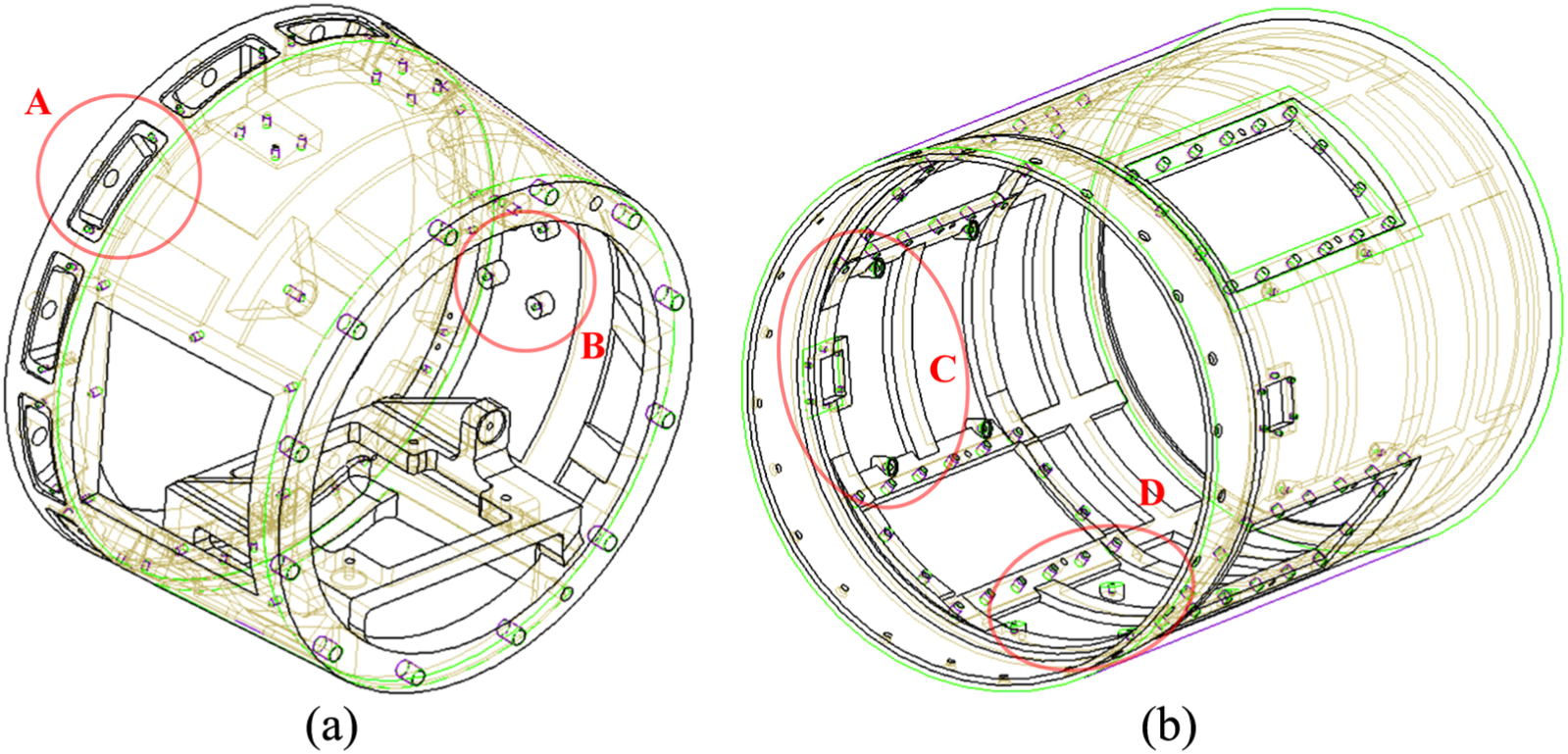
3D design model of spacecraft cabin structures: (a) The model of Prt1 and (b) The model of Prt2.
Note that the concave features and convex features in cast-then-machined parts are manufactured in different ways. Concave features like holes, cavities, and grooves are derived from removing materials, while the convex features such as bosses are first casted with a machining allowance and then machined. Thus, the concave and convex features should be recognized separately. Moreover, if a feature is interacted with another, the manufacturing process can be various, which means the interacting relationship is also important information. Therefore, the coexistence of hundreds of concave and convex mixed features and the various interacting relationship among them, which have never been studied, make feature recognition of cabin structure much more difficult. This article focuses on solving this critical problem in feature recognition.
The novelty of this work is reflected in the following three aspects: first, a novel oriented feature extraction and recognition approach (OFERA) is proposed for concave-convex mixed interacting features; second, rules are used to search and recognize features instead of subgraph isomorphism and matching operations, so that the time cost is dropped sharply; third, the proposed approach can be applied on a wide range of mechanical parts.
Literature review
Existing feature recognition methods developed by numerous researchers are mainly divided into four categories, namely, the volumetric decomposition,20–23 graph-based,24–38 hint-based,39–43 and artificial neural network (ANN) approaches.44–46 By considering the massiveness and diversity of feature and variety of feature interacting ways in cabin structures, volumetric decomposition method is not applicable for its huge amount of volume segmentation operations and time costing. Hint-based technique is in trouble to observe enough useful hints. ANN method is not yet applicable on interacting feature recognition problems. Graph-based approach is considered the only feasible method for cabin structures. Because of the correspondence between boundary representation (B-rep) data structures and graph structures, the graph-based approach is the most popular feature recognition method. It successfully benefits from the well-developed mathematics of graph theory, but its performance is still need to be promoted.
The original graph-based approach proposed by Joshi and Chang 24 deletes the surface whose incident edges are all convex, and disconnects the surfaces sharing a common convex edge, so that subgraphs containing only concave edges are obtained. The feature type is finally identified via graph matching. A great deal of studies on interacting feature recognition have been inspired soon afterward. Joshi and Chang 24 recognized two kinds of interacting features by heuristics. However, their graph isomorphism results were incorrect for features with convex edges. Following researchers combined graph-based approach with other approaches. Kashyap and colleagues25,26 introduced virtual links, but they could not get all necessary virtual links effectively. Gao and Shah 27 generated minimal condition subgraphs (MCSGs) with fixed procedures and used them as hints. Although their method was open to new features without code changing, MCSG generation was easily interfered by redundant convex edges in sophisticated models. Rahmani and Arezoo 41 also used graph-based hints and proposed volume generation algorithms for 2.5D and 3D interacting features. Sunil et al. 29 presented a new graph and rule-based approach, which successfully recognized variable feature interactions.
Take note that almost all the existing graph-based algorithms segment part graph into subgraphs first, but the fixed subgraph segmenting codes do not suit all parts, especially the parts that contain convex features and concave-connected non-machining surface. On the other hand, features interacting may produce convex edges, which interfere acquiring predefined feature through graph decomposing. In addition, some of the casted surfaces, which are also connected by concave edges, may be misjudged as a feature needs processing.
In this work, a novel hybrid (graph + rule + hint)-based efficient feature recognition methodology is proposed, which is named OFERA. OFERA use rules rather than graph isomorphism to directly extract predefined concave and convex features regardless of other structures. As a result, the concave and convex features can be successfully recognized and do not interfere with each other, and the time complexity is dropped to less than
Basic concepts and notations
In this section, some basic concepts are defined, which are mentioned in recognition of concave, convex, and interacting features. First, notations used in this study are listed in Table 1.
Notations and description.
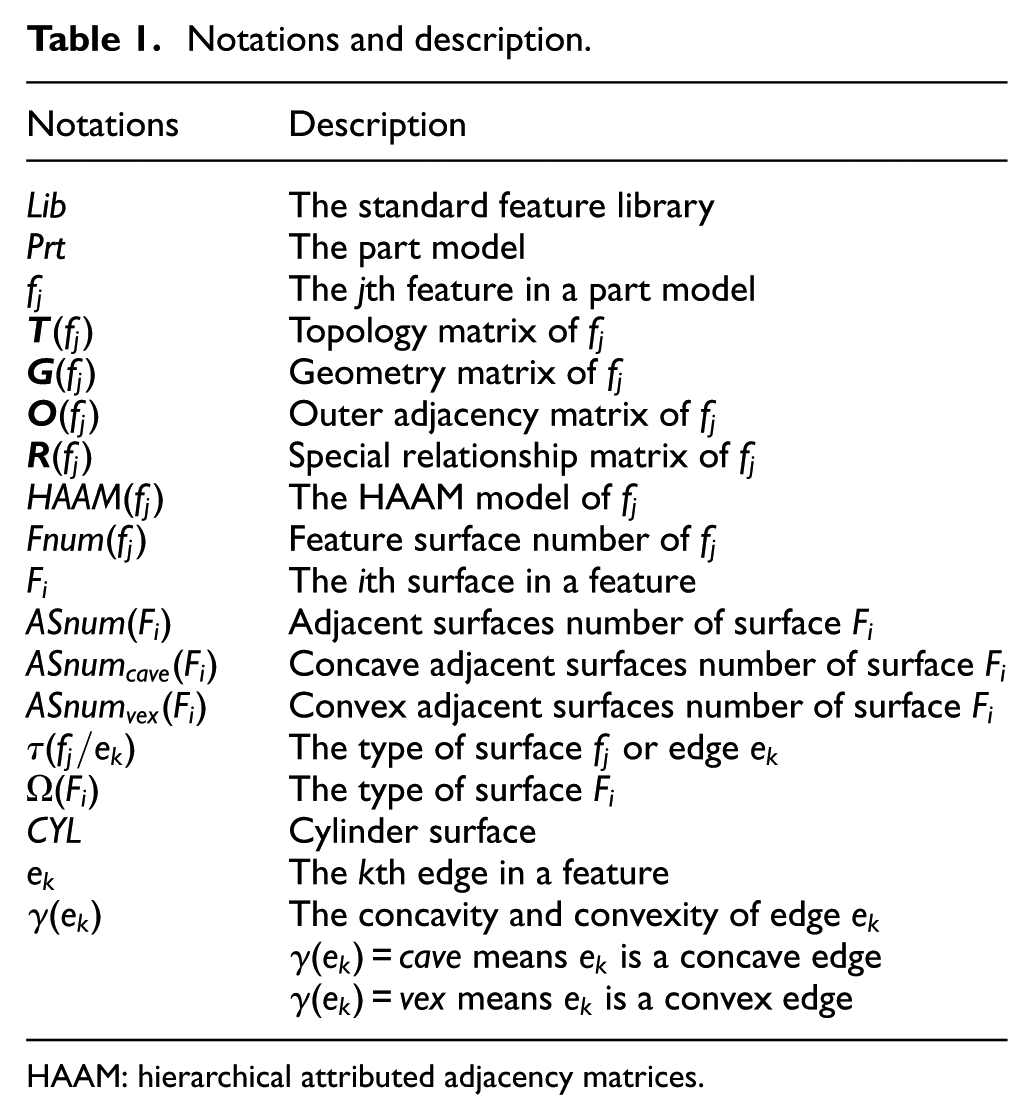
HAAM: hierarchical attributed adjacency matrices.
The basic concepts are presented as below:
Feature surface: if a surface
Outer adjacent surface: if a surface
Top surface: if
Bottom surface: if
Side surface: if
Primary and secondary sub-feature: the sub-feature which is first extracted in a pair of sub-features of an interacting feature is the secondary sub-feature, and the other one is the primary sub-feature.
Associating edge: if
Merged surface: if
Start surface: the distinctive surface in
Left surface: for a surface
Methodology overview
The proposed methodology architecture is presented in Figure 2. First, a graph-based virtual feature library
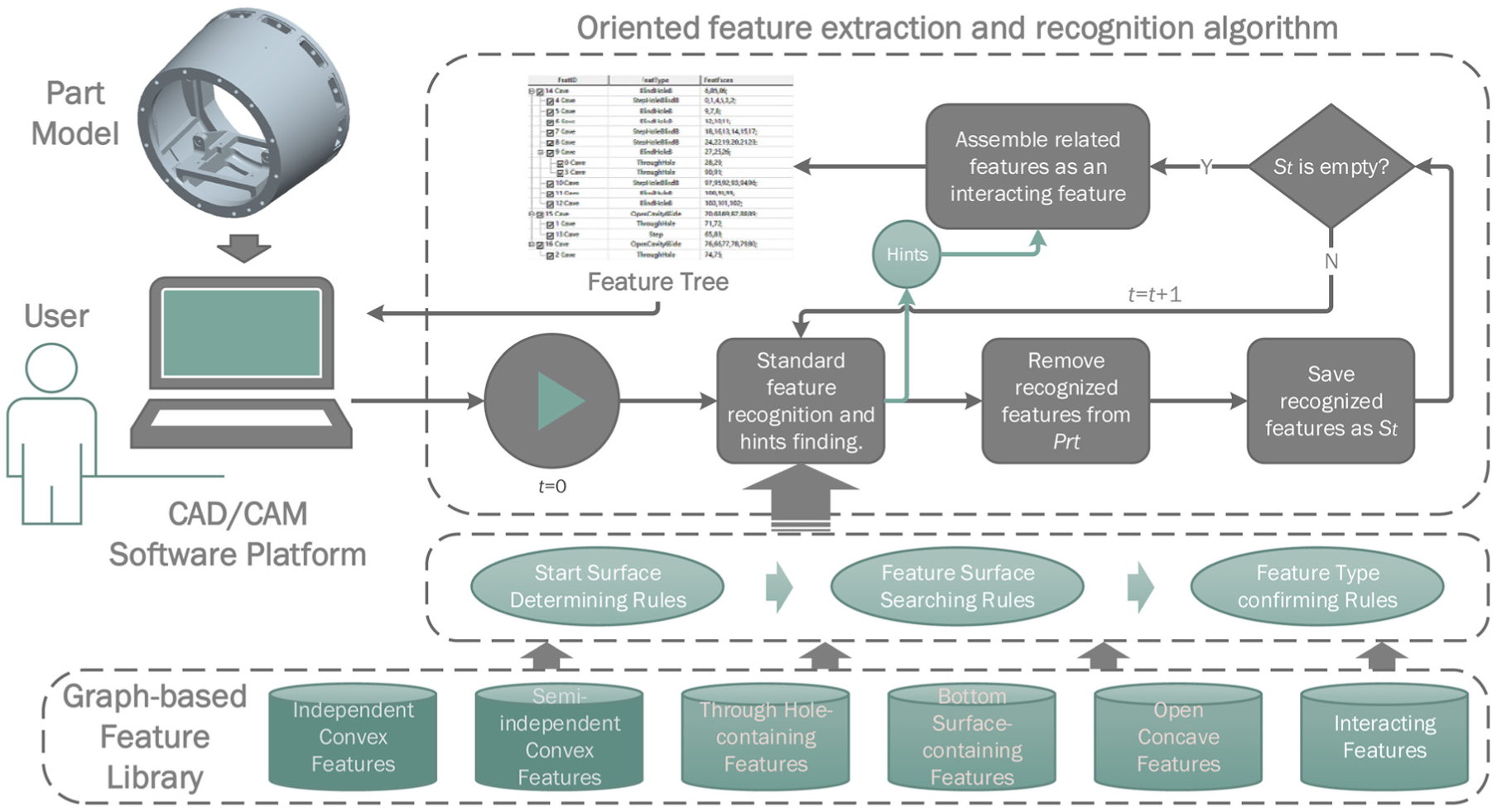
Methodology architecture.
Different from traditional graph-based method, adjacent attributes of surfaces provided by graph-based feature library are used to customize rules for recognizing predefined features, so that no subgraph decomposing and matching operations are needed. At the same time, feature interaction hints like merged surfaces and left surfaces are also found during execution of feature surface searching rule. Standard feature recognition and hints finding operations are implemented by OFERA till no features are recognized. Finally, the recognized features related by hints are assembled as interacting features and organized as a feature tree to be the output.
Feature library
In the library, features are mainly divided into standard features and interacting features first as previous researchers24,27,29 did. They are expressed in feature library using improved HAAM model.
Feature representation method
The HAAM model improved from the previous work 37 is adopted to depict the information of 3D model

Topology matrix
Analysis of standard features
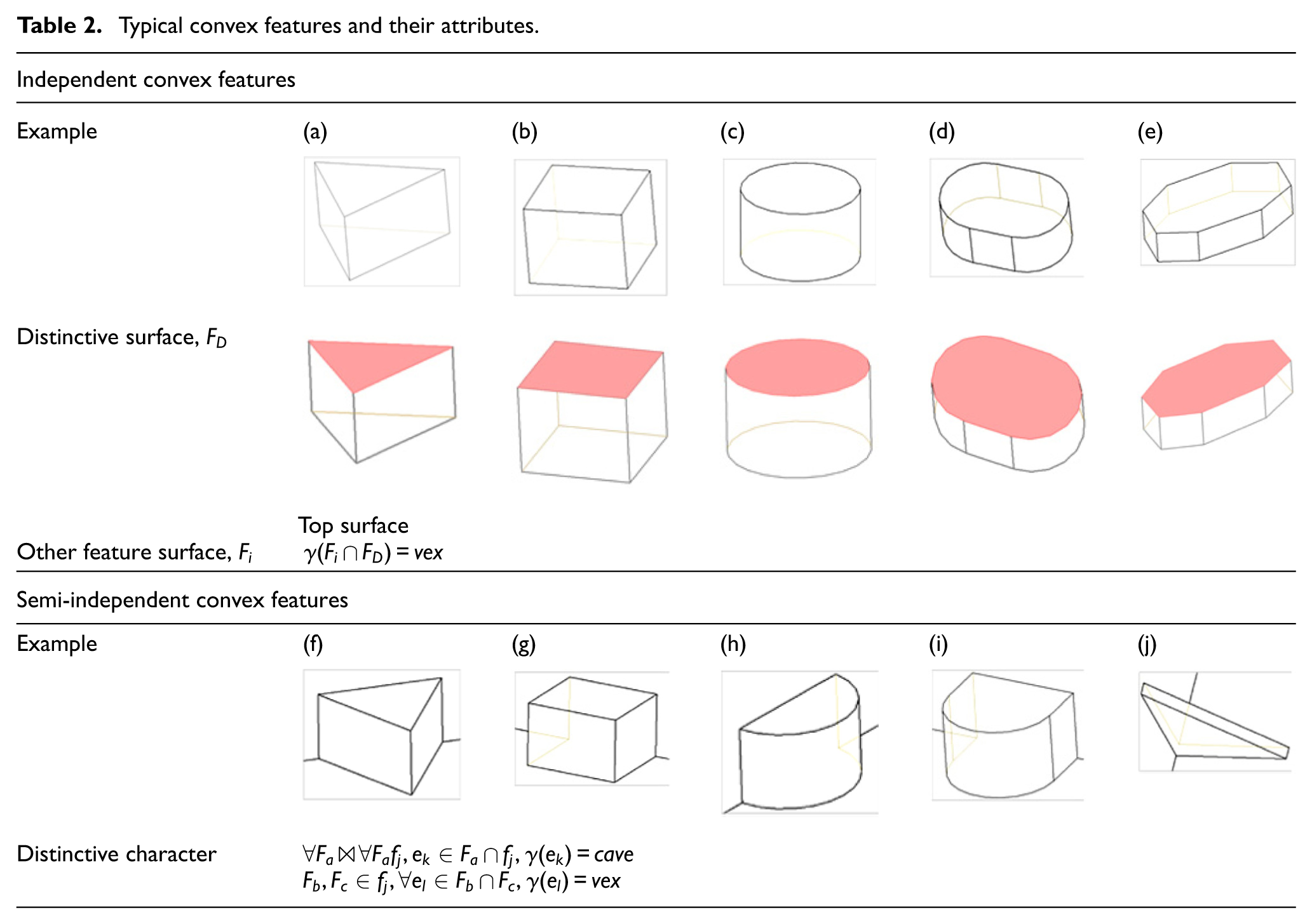
Standard features consist of convex features and concave features, which are sorted by the adjacent attribute among their feature surfaces. Some typical convex and concave features are demonstrated in Tables 2 and 3, respectively.
Typical convex features and their attributes.
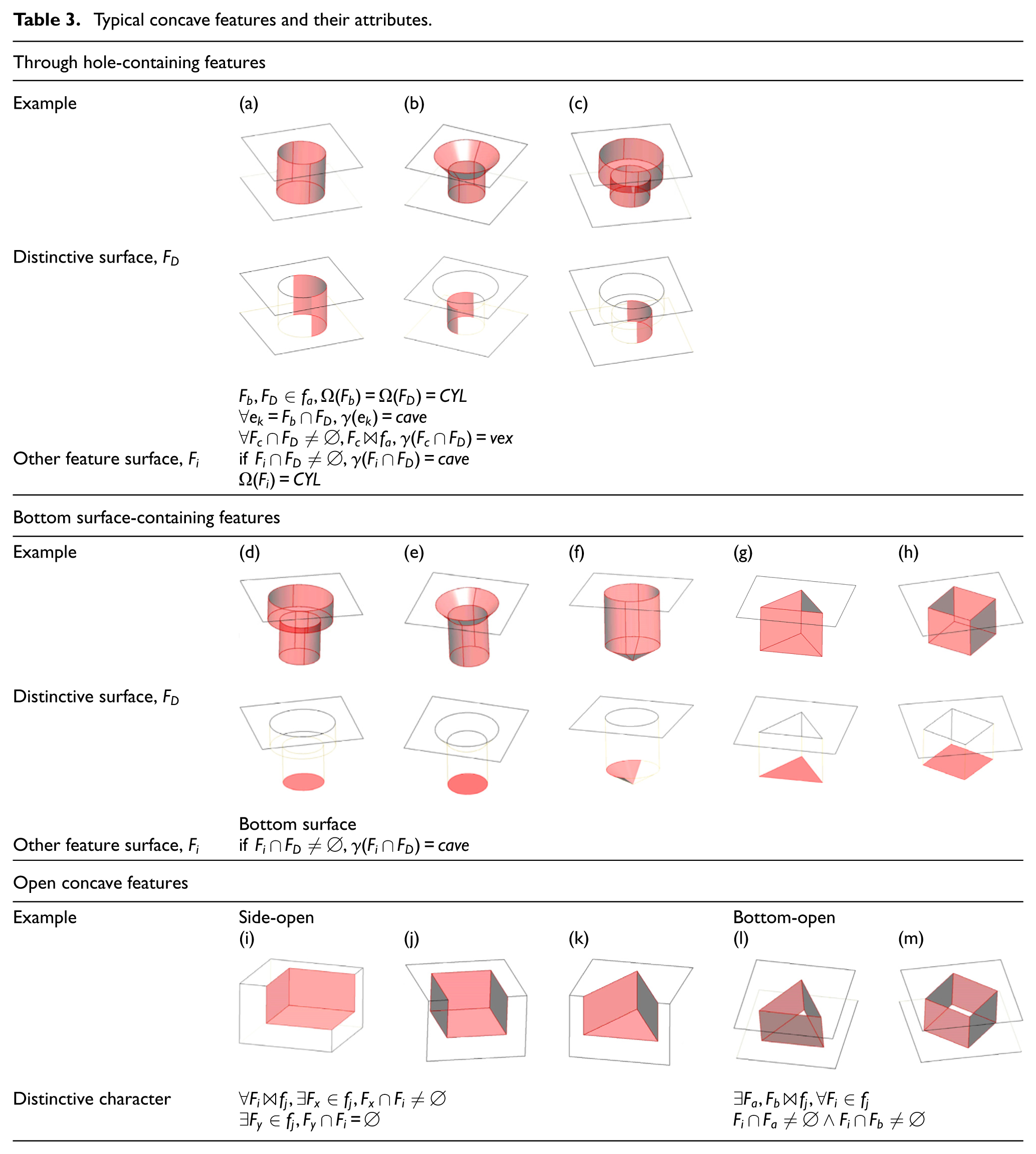
Typical concave features and their attributes.
An independent convex feature is the convex feature which has a top surface, as illustrated in Table 2(a)–(e). The top surface can be used to locate an independent convex feature. A semi-independent convex feature is the convex feature generated by leaning an independent convex feature on other solid surfaces, as shown in Table 2(f)–(j). Semi-independent convex features have no distinctive surface like the top surface in independent feature.
A through hole-containing feature is the concave feature that includes a through hole, such as through hole itself, through counterbore, and through stepped hole presented in Table 3(a)–(c). The distinctive surface of a through hole-containing feature is either of the cylinder surface in a through hole. A bottom surface-containing feature is the concave feature
Analysis of interacting features
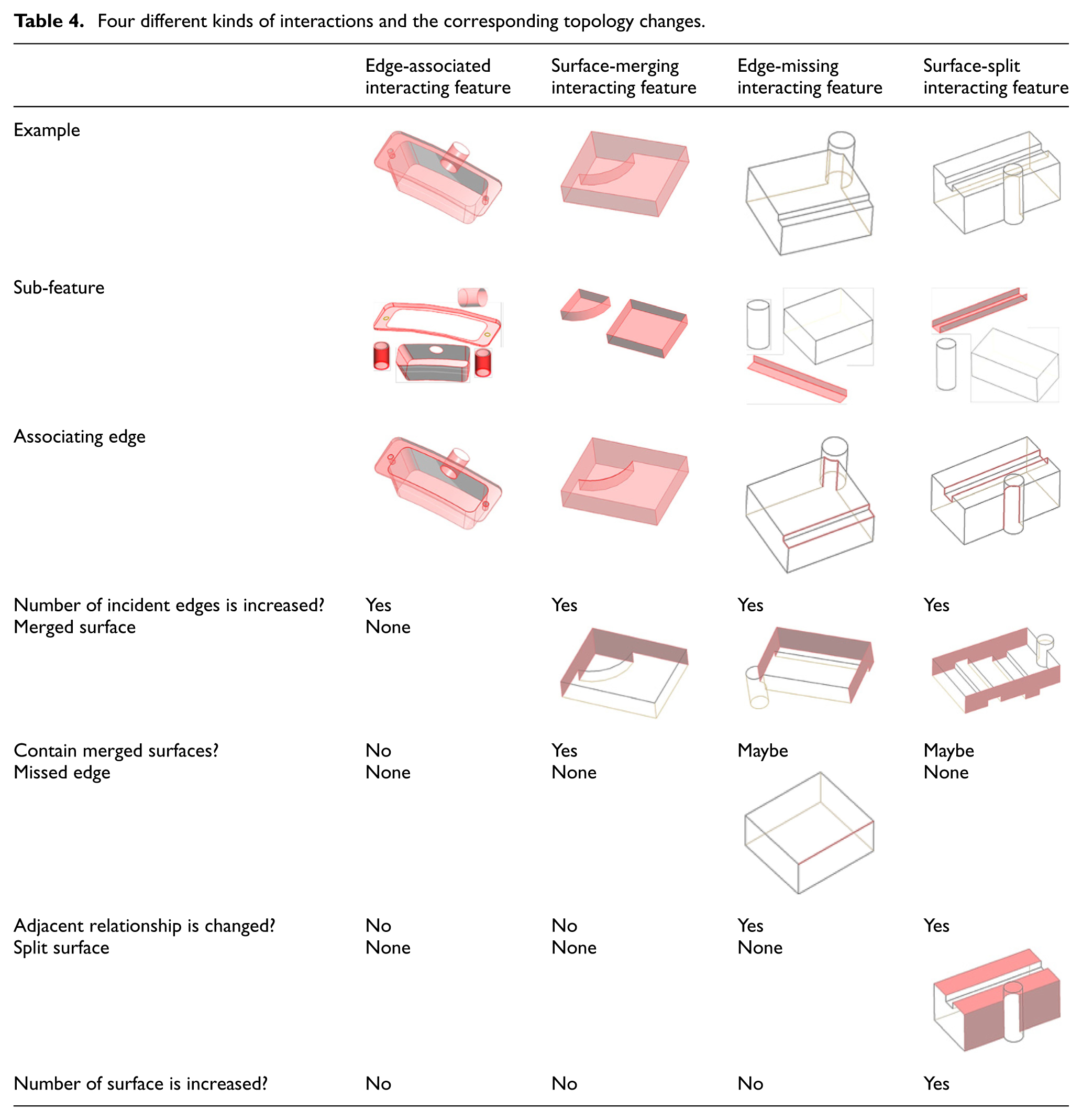
The interacting features are sorted into four categories in accordance with the topology changes after interaction. Four interacting feature types are, namely, edge-associated, surface-merging, edge-missing, and surface-split interacting features. Assume that
Four different kinds of interactions and the corresponding topology changes.
Analysis of edge-associated interacting features
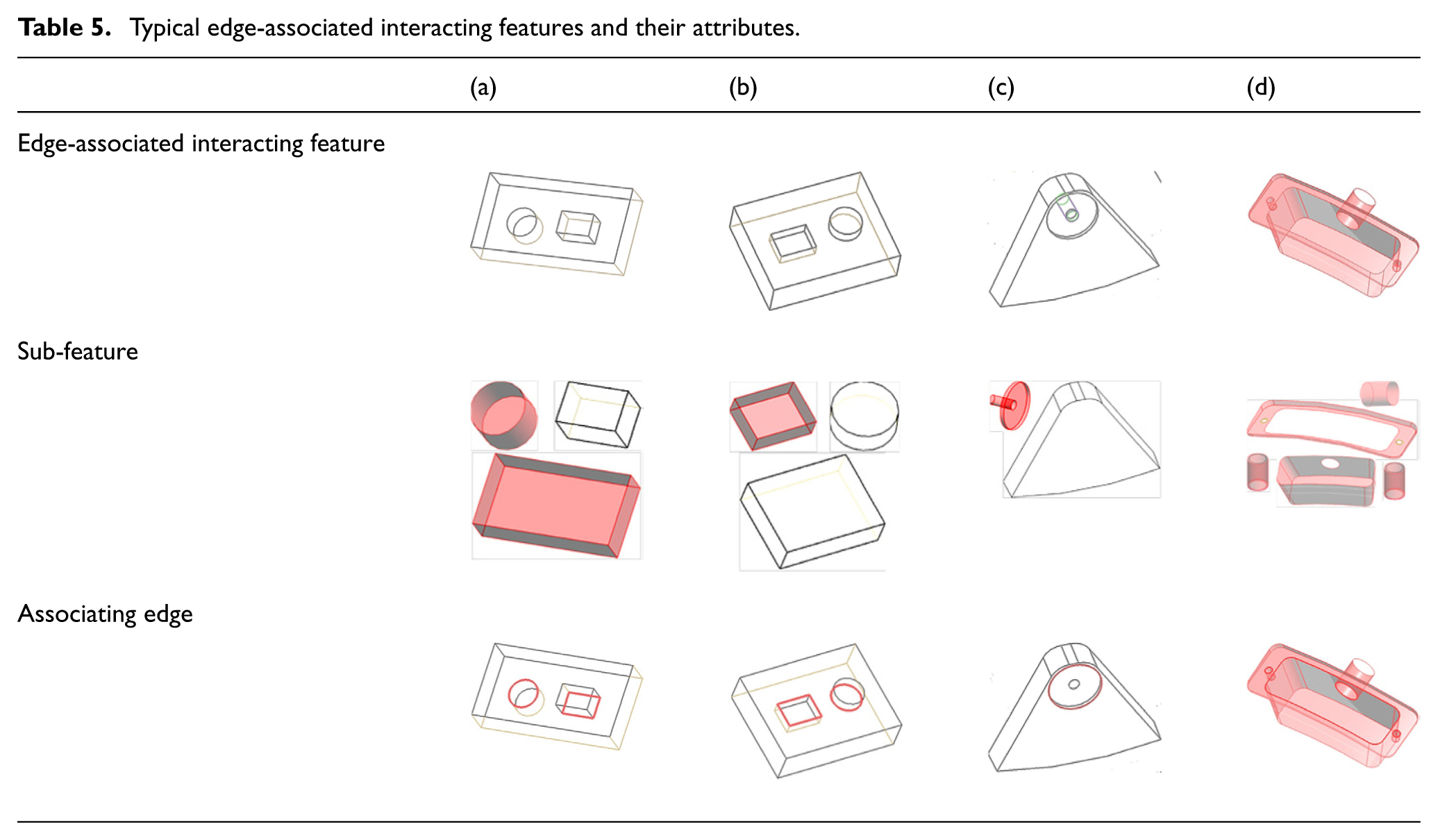
As Table 5 presents, in an edge-associated interacting feature
Typical edge-associated interacting features and their attributes.
Analysis of surface-merging interacting features
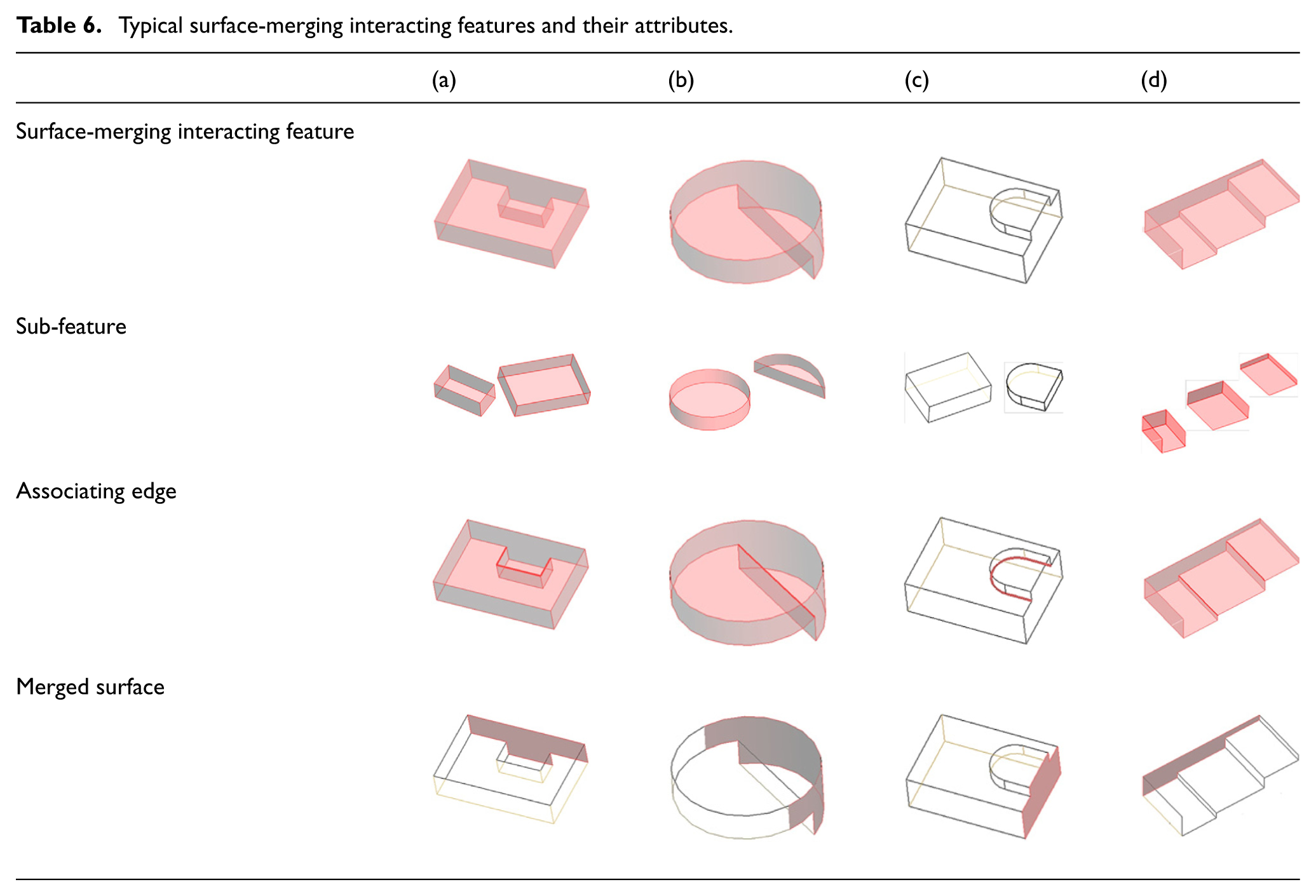
In a surface-merging interacting feature
Typical surface-merging interacting features and their attributes.
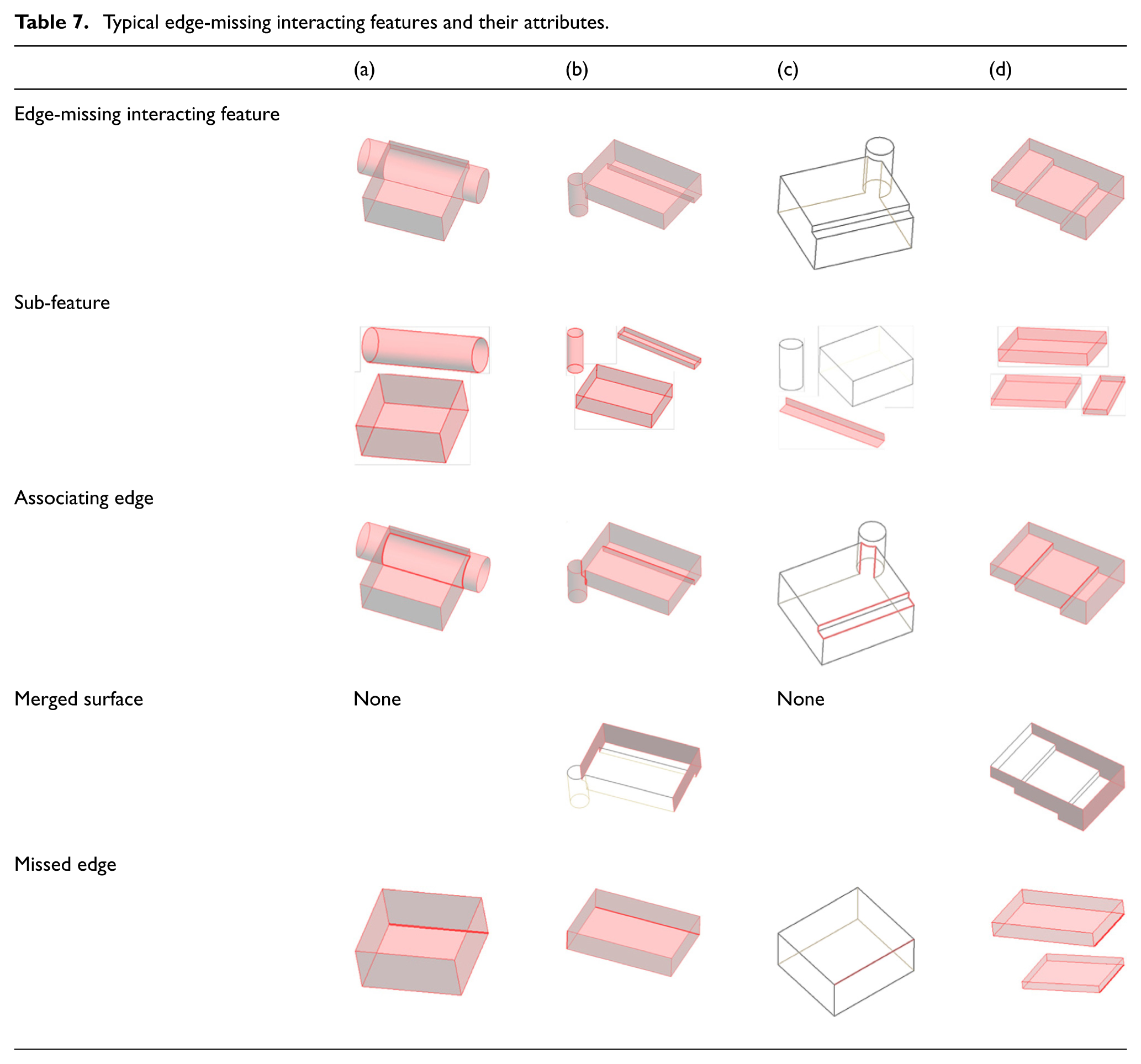
Analysis of edge-missing interacting features
At least one sub-feature of edge-missing interacting features lose edges after interaction, as illustrated in Table 7. In an edge-missing interacting feature
Typical edge-missing interacting features and their attributes.
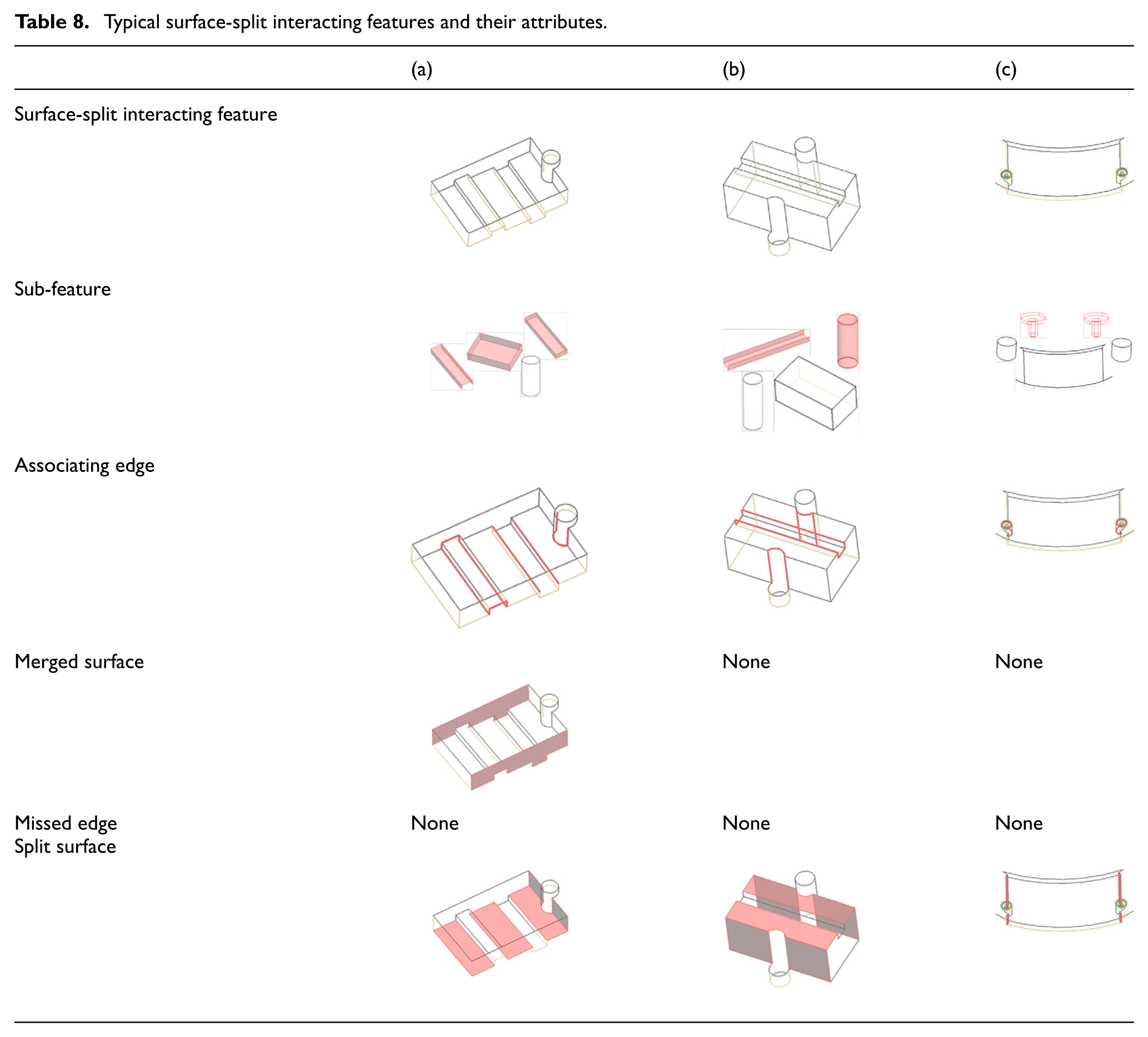
Analysis of surface-split interacting features
Table 8 presents that in surface-split interacting features,
Typical surface-split interacting features and their attributes.
OFERA
Overall process of OFERA
The overall process of OFERA is demonstrated in Figure 3. Due to feature interaction, OFERA has
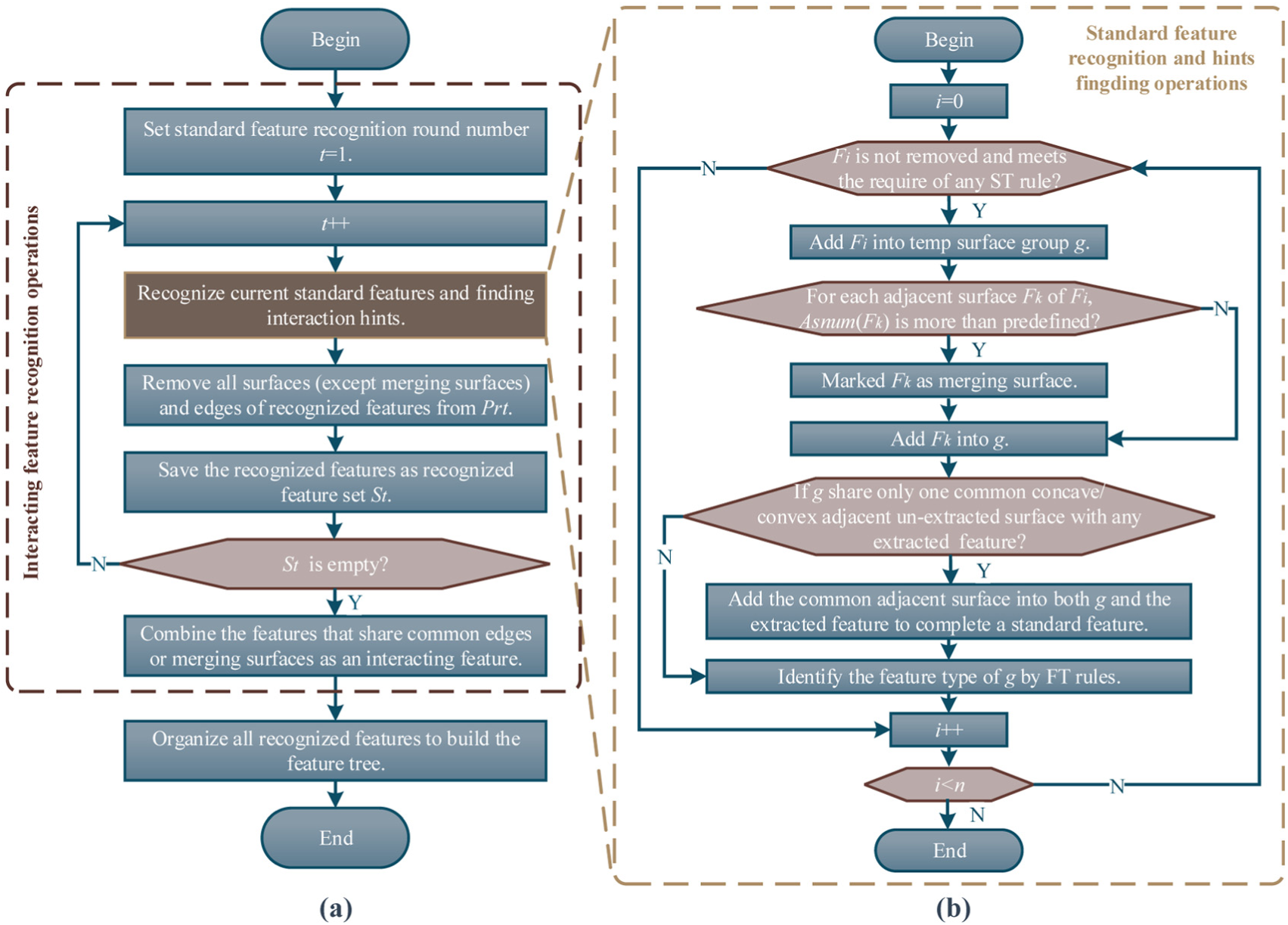
Schematic flow of OFERA: (a) main process of OFERA and (b) standard feature recognition and hints finding operations.
According to Figure 3, if
Standard feature extraction and recognition
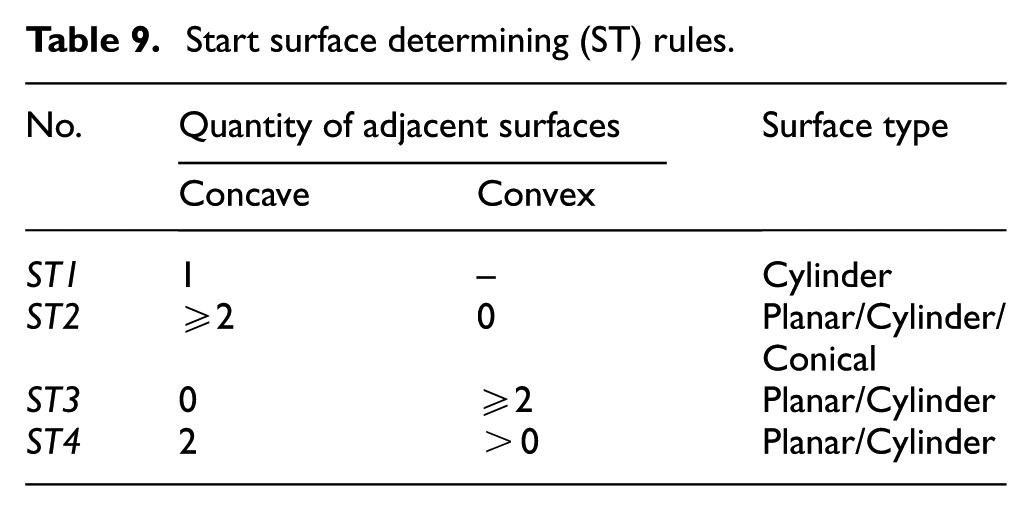
Start surface determining (ST) rules.
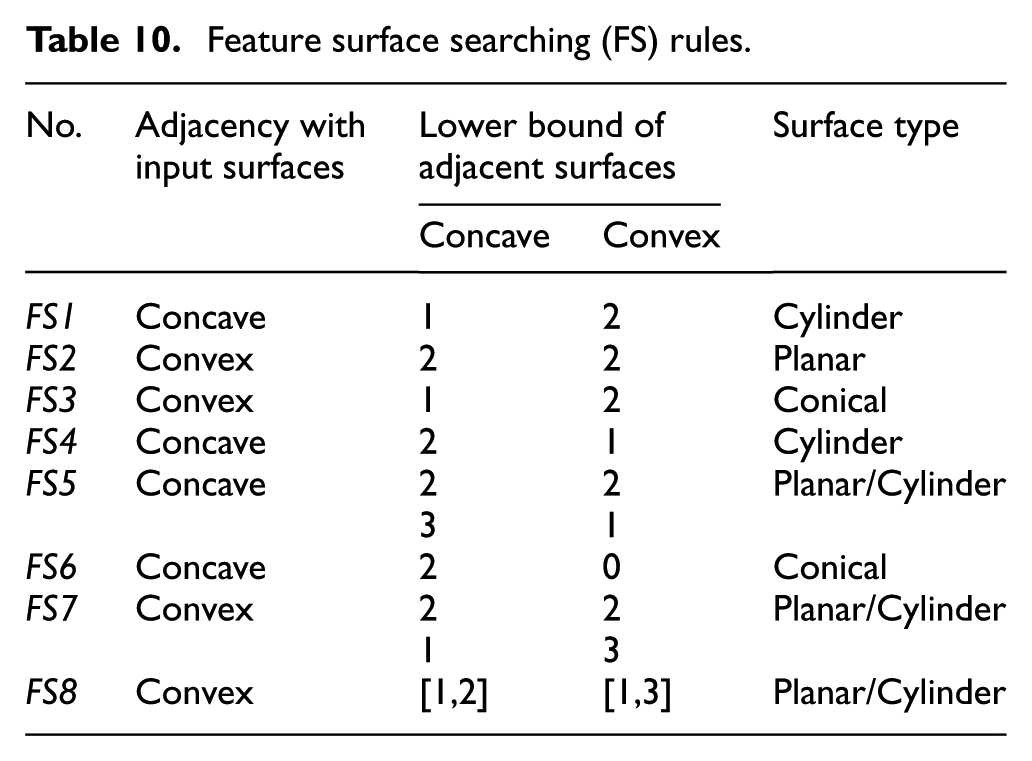
Feature surface searching (FS) rules.
Feature type confirming (FT) rules.
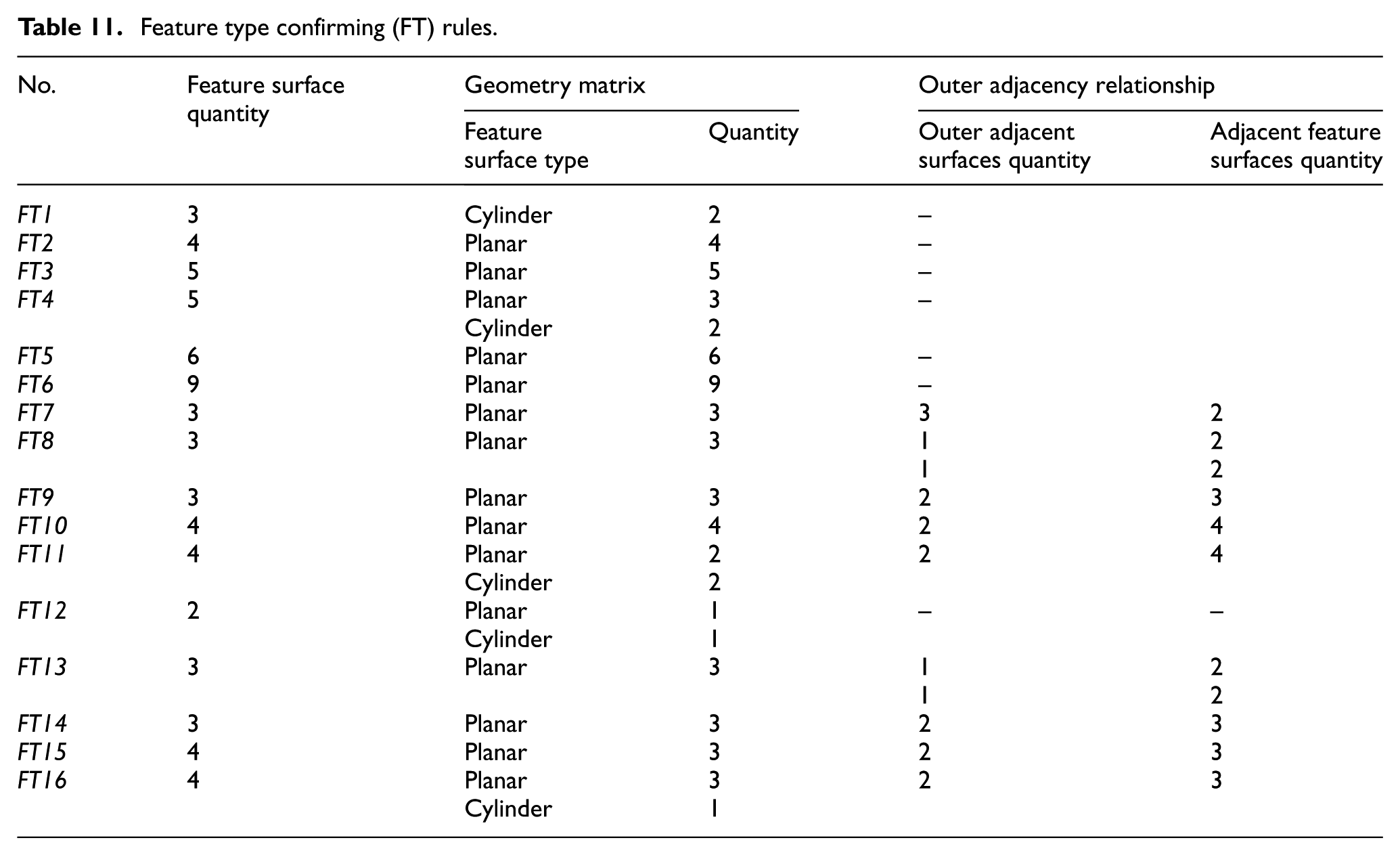
The rules are applied orderly in accordance with the route map demonstrated in Figure 4. The ST rules are designed to locate the distinctive surface of each kind of features (see Figure 5(b))

where

where FSx is a feature surface searching rule. Because of the similarity of feature structures, some features share ST rules and first few steps of FS. If no surface is gotten in a FS step or no FS step is following,

where

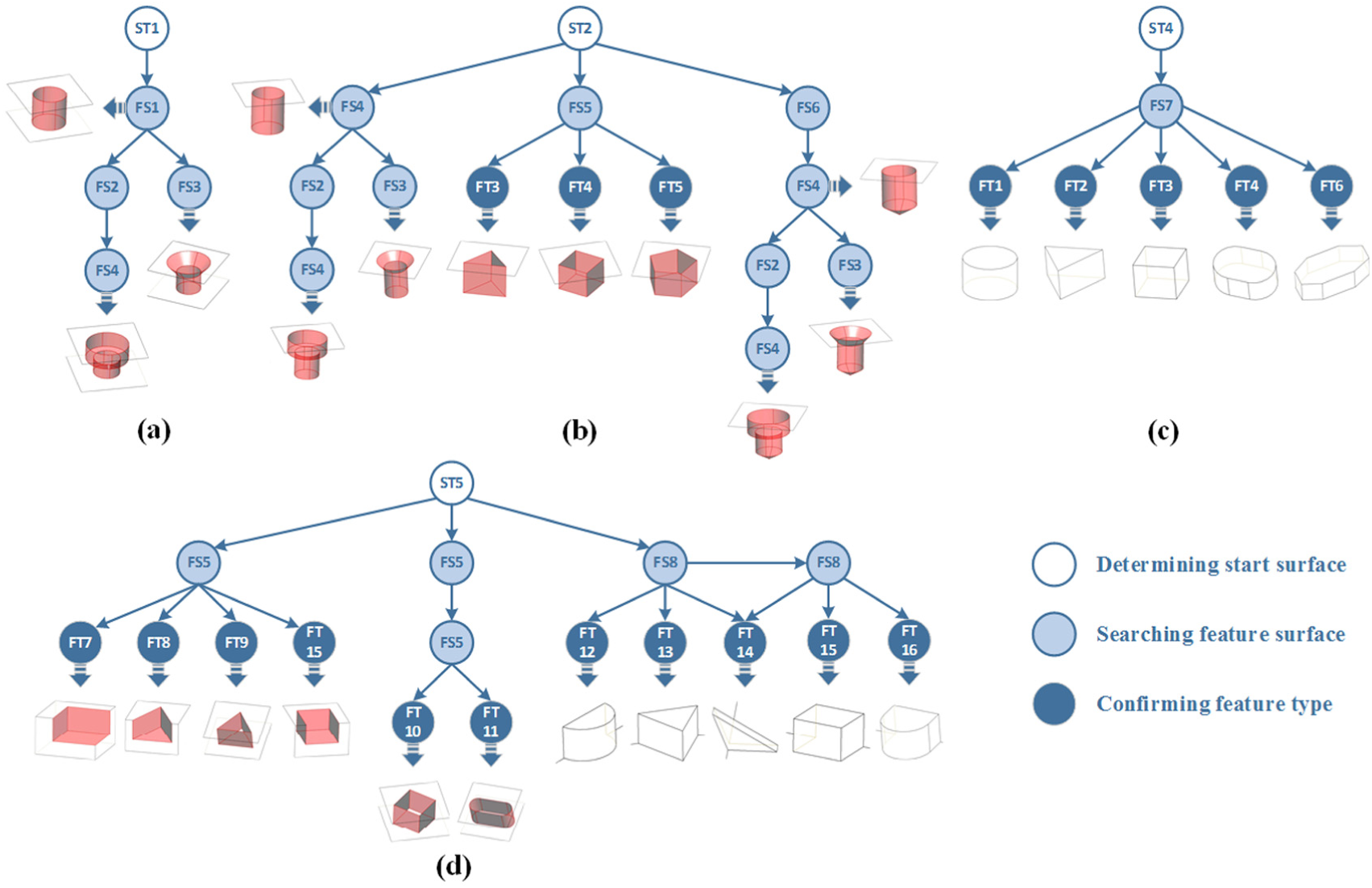
Route map of
Example of implementing
Interacting feature extraction and recognition

where

where

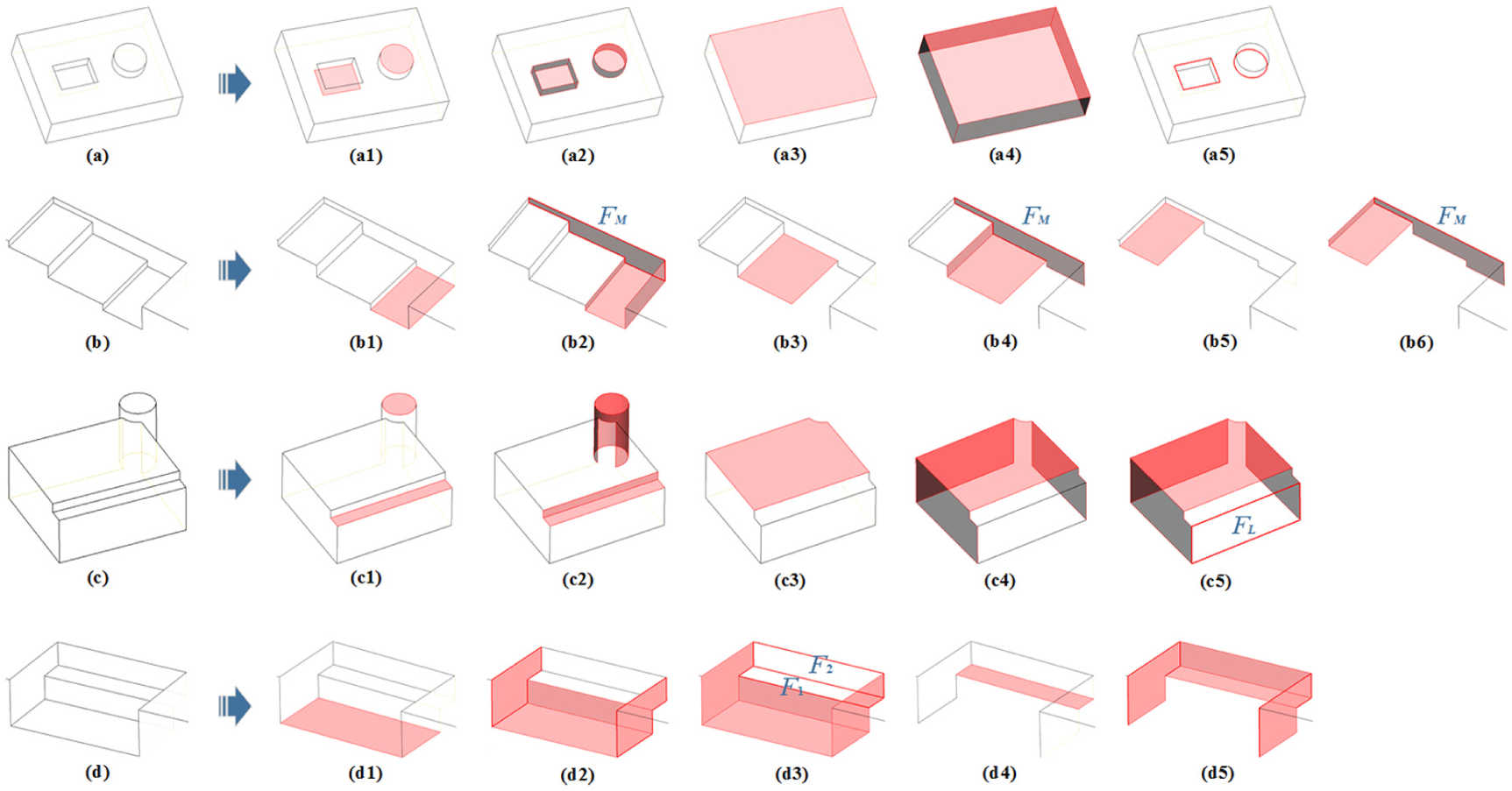
Extraction and recognition of (a) an edge-associated, (b) a surface-merging, (c) an edge-missing, and (d) a surface-split interacting feature.
Left surfaces are added into the just extracted feature.
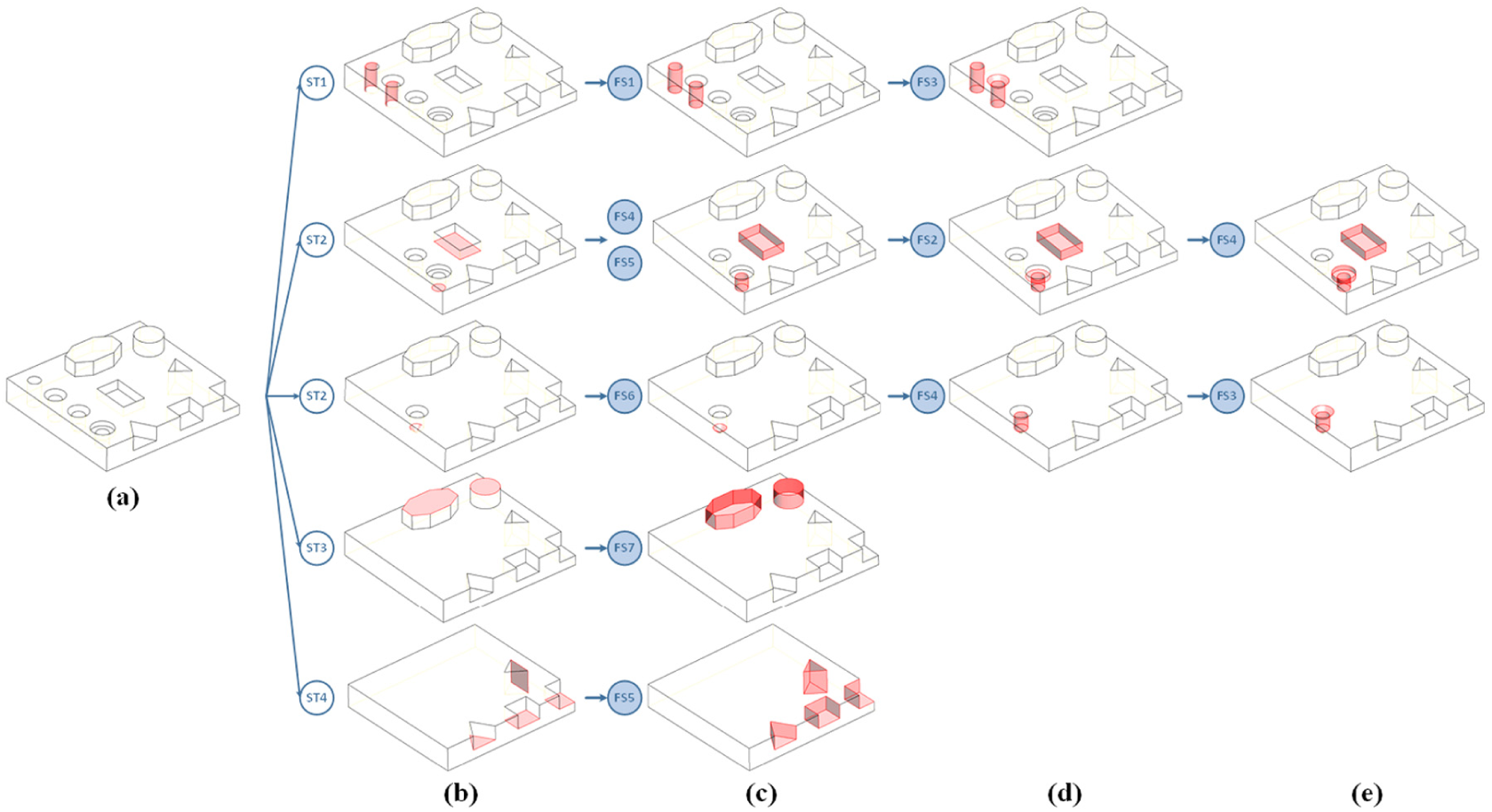
All rounds of feature recognition results about part

Sub-features of the same interacting feature are related by common edges, merged surfaces, and left surfaces as demonstrated in Figure 7(d)

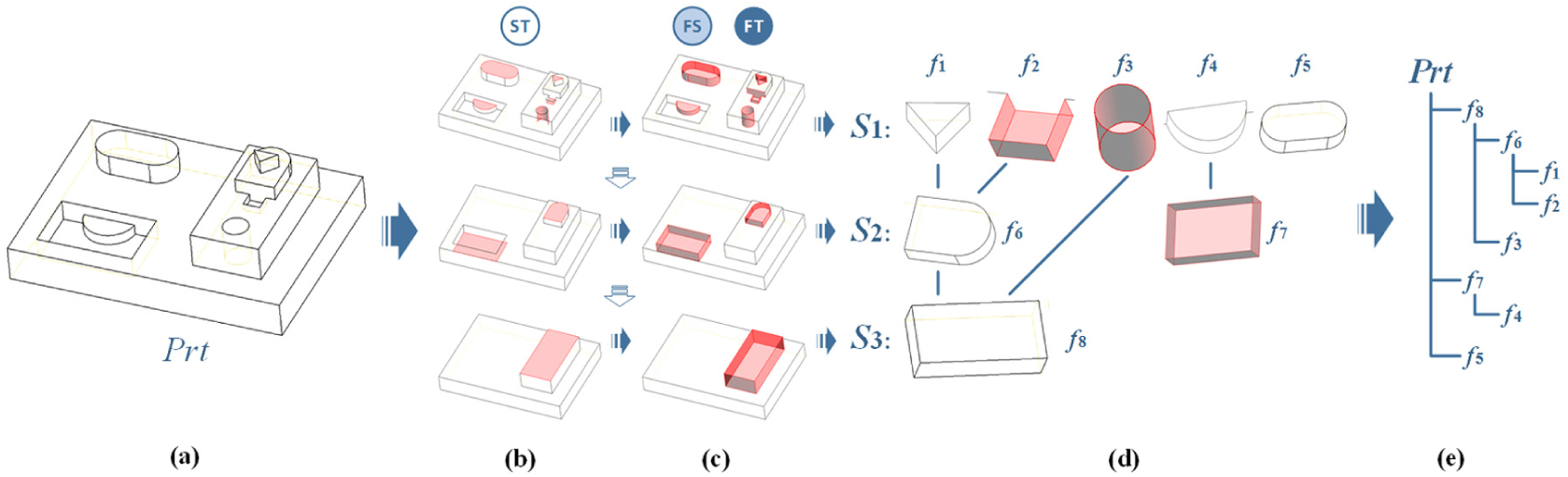
Sketch map of feature tree organization: (a) the original model, (b) locating start surface, (c) searching feature surfaces, (d) feature recognition results, and (e) feature tree.
The primary and secondary sub-features in each pair of associated sub-features are easy to be differentiated according to round order.
The last step of OFERA is to organize all recognized features as a feature tree. As shown in Figure 7, isolated features (like
Case studies
The proposed approach is realized using VC++ programming language to redevelop Pro/Engineering API (Application Programming Interface). B-rep information needed in OFERA are extracted from CAD model by API objects. To highlight the applications of OFERA, example models are adopted from National Design Repository (NIST) and practical cabin structure models; on the other hand, several of the traditional approaches are reproduced as part of this work.
Illustrative case study 1
In order to verify the versatility on parts of basic types, some typical prismatic, plate, fork, axlebox, linkage, shaft, and cast-then-machined parts are selected from NIST. The test results in Figure 8 show that most of the features to be machined are recognized by applying OFERA successfully, regardless of the types of parts. Note that (g1) demonstrates one of the derived adjacent surface sets by applying traditional graph-based method.24–27,29,41,47 The highlighted surface are grouped as a concavely connected surface set by disconnecting convex edges. However, none of these surface groups is to be machined in one operation after casting. In comparison, the holes and bosses are identified by OFERA in (g2) and (g3). This case study demonstrates that OFERA can be widely used in feature recognition of mechanical parts and performs better than the traditional graph-based method.
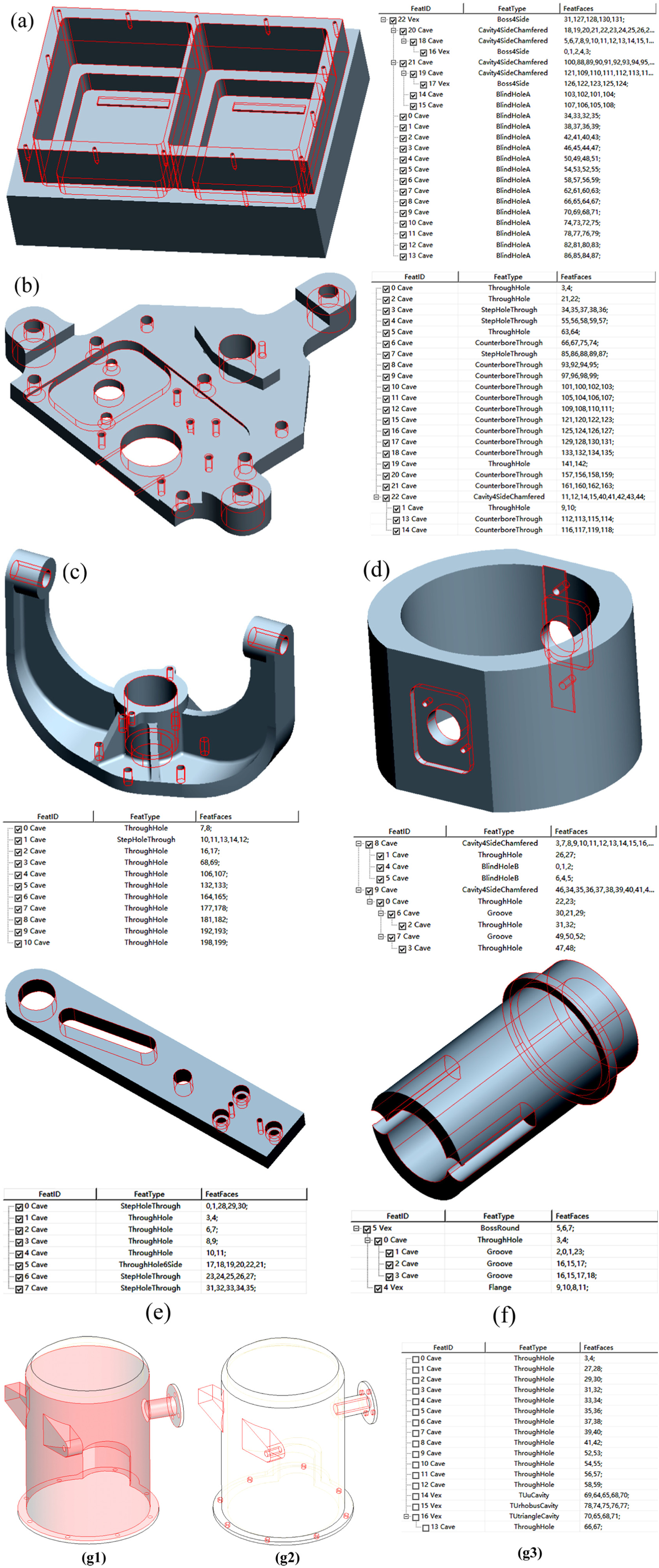
Test results of (a) prismatic, (b) plate, (c) fork, (d) axlebox, (e) linkage, (f) shaft, and (g) cast-then-machined parts.
Illustrative case study 2
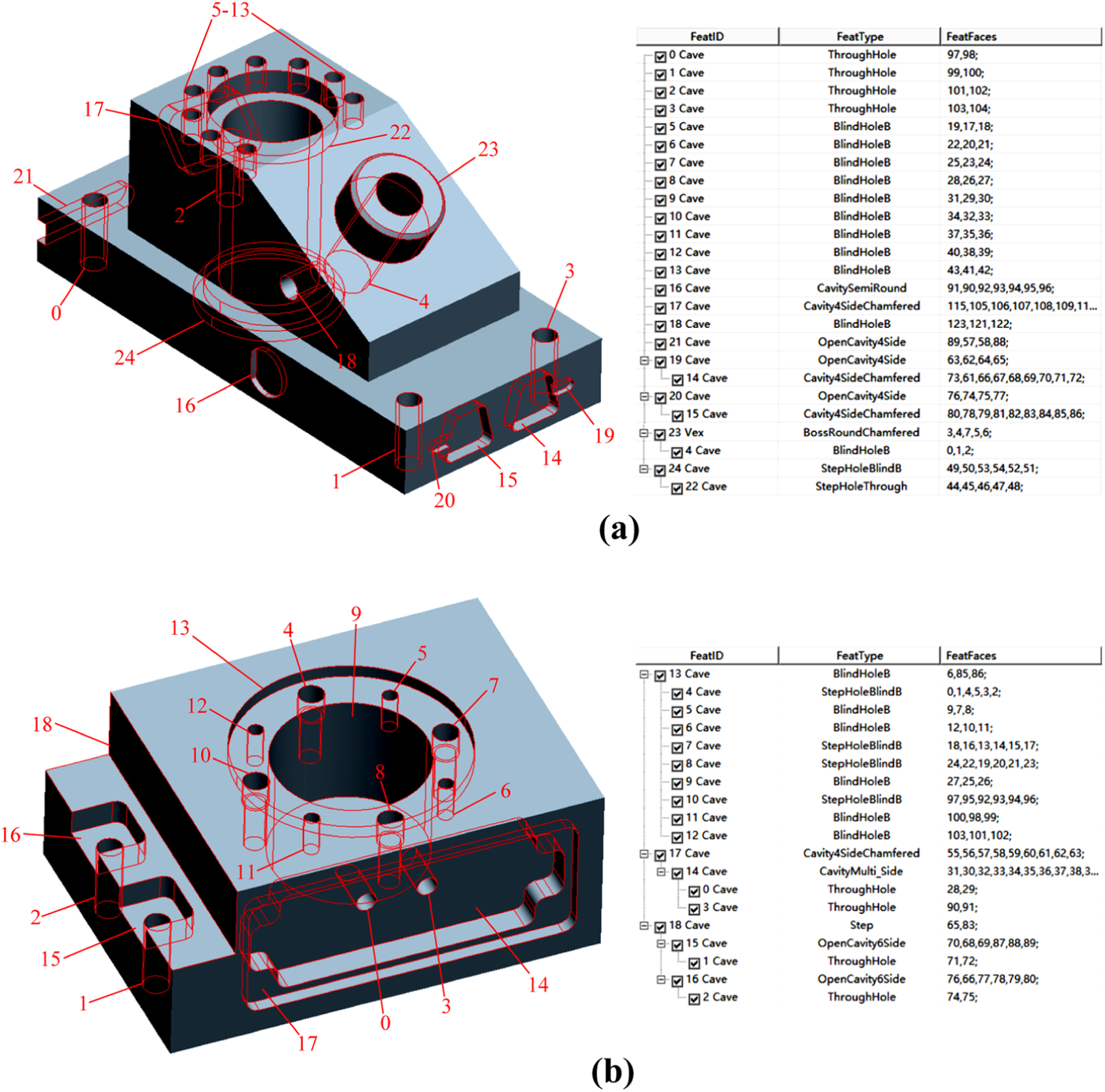
The proposed method is compared with the feature recognition algorithm presented in the literature,27,29 which is shown in Figure 9. The convex feature 23 in Figure 9(a) was segmented into several surface features in the literature. 27 Furthermore, the feature relationships, which are presented as a feature tree in Figure 9(a), were not identified in the literature. 27 Figure 9(b) illustrates that, together with other 18 features, feature 13 is also recognized, which was not extracted in the literature. 29 Therefore, the proposed methodology is proved to have better performance on the cases solved by previous graph-based approaches.
Illustrative case study 3
Figure 10(a)–(d) presents the results of implementing OFERA on a real cabin structure. Figure 10(a) shows all isolated standard features, and four large-scale interacting features are highlighted in Figure 10(b). A typical edge-associated interacting feature in the cabin structure is demonstrated in Figure 10(c). The interacting feature in Figure 10(d) contains both edge-associated and surface-splitting interacting features.
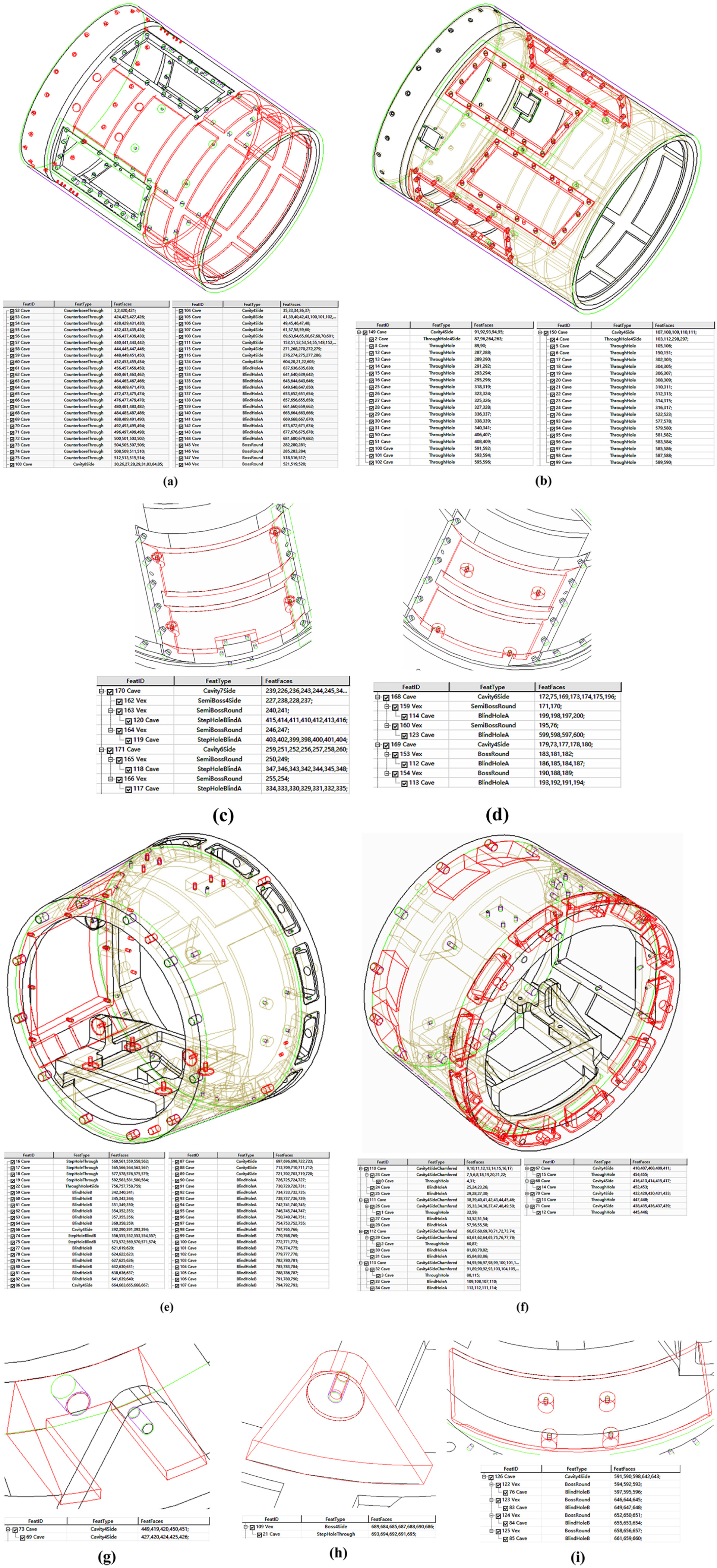
Test results of cabin structure A and B. The recognized (a) isolated standard features, (b) large-scale interacting features, (c) two concave-convex mixed interacting features, (d) another two concave-convex mixed interacting features in cabin structure A. The recognized (e) isolated standard features, (f) edge-associated interacting features, (g) surface-merging interacting feature, (h) concave-convex mixed interacting feature, and (i) another concave-convex mixed interacting feature in cabin structure B.
Application effects of OFERA on another cabin structure part are demonstrated in Figure 10(e)–(i). The recognized isolated features are highlighted in Figure 10(e). Two kinds of recurring edge-associated interacting features are marked in Figure 10(f). A surface-merging interacting feature is recognized in Figure 10(g). Figure 10(h) and (i) demonstrates two concave-convex mixed interacting features. In Figure 10(h), four round bosses with a blind hole are on the bottom surface of a four-side cavity. A chamfered boss and a stepped hole are integrated as the edge-associated interacting feature in Figure 10(i).
Both of two real cabin structure parts have plenty of concave and convex features. The mass of concave-convex mixed interacting structures makes it difficult to obtain accurate results for subgraph isomorphism. Therefore, only few of isolated concave features can be recognized by traditional graph-based method.24–27,29,41,47 Instead, OFERA first locates the distinctive surface of each concave and convex standard features by start surface determining rules. Then, it searches other feature surfaces to complete a feature. Hence, it automatically ignores the surfaces on other structures of the model, which do not fit the judgment conditions of corresponding rules. As a result, OFERA is more effective in extracting concave and convex standard features, and concave-convex mixed interacting feature from complicated part models.
Conclusion
In this work, a novel oriented feature extraction and recognition approach for concave-convex mixed interacting features in cast-then-machined parts was successfully presented as known OFERA. Its time cost was under
Basically, the proposed approach is an extensible methodology framework of feature recognition. Moreover, this design can be customized for specific parts and features by modifying conditions in rules. Based on this point, there is great potential for employing the proposed approach to recognize features in other parts with plenty of features interacted in different ways, such as structure parts of aircraft, automobile engines, calibrating dies, and plastic injection molds.
It should be mentioned that the source code of the proposed methodology framework is not fixed because of its extendibility while adding new predefined features. In addition, features containing freeform surfaces were not under consideration. In the future work, how to automatically construct the 3D process model and generate NC program using the feature recognition results will be studied.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the First Batch of Guidelines of “13th Five-Year” Pre-research on Common Information System Equipment for the Whole Army (No. 41423010101).