
Abstract
The 3-2-1 fixture design principle is the most used method to locate prismatic workpieces. To further increase location accuracy, the influence of friction and contact stiffness between workpiece and fixture parts should be minimized. This can be achieved by decreasing the structural stiffness of the locators in the tangential direction to the contact. Hence, based on flexure hinges, locators with two different stiffness values are investigated. To analyze the influence of locator stiffness, a special experimental setup is developed to study two locators positioned in the secondary plane of the 3-2-1 fixture. Experiments are carried out to compare the locators with flexure hinges to a rigid one. The displacement and rotation of the workpiece are investigated as a function of the clamping force. The experimental results show that the reduction in the tangential stiffness can improve the position and orientation accuracy of workpieces.
Introduction
In order to increase the positioning accuracy of the 3-2-1 fixture system, several studies have been published in recent decades. The positioning and orientation errors of a workpiece have been modeled as a function of locators’ accuracy by Fallah and Arezoo
1
and Tang et al.
2
In addition, Abedini et al.,
3
Nasr et al.
4
and Vasundara and Padmanaban
5
developed algorithms to determine the best position of locators and clamps to minimize workpiece positioning errors in machining. When machining a workpiece with narrow tolerances is desired, maintaining the workpiece in the same attachment without repositioning is advised. That is because factors such as friction, surface roughness and contact stiffness stop the workpiece from moving to the ideal location. In this regard, kinematic couplings play an important role to locate mechanical components with high accuracy.
6
The simplest kinematic coupling consists of three radial V-grooves on one part that match three half spheres on the other part. An interesting work is presented by Li et al.,
7
in which the improvement of positioning accuracy of kinematic coupling is compared to other types of coupling principles. Therefore, even for these more precise systems, the problem of positioning accuracy exists. Schouten et al.
8
pointed out that the positioning accuracy is improved when hysteresis decreases. In the kinematic coupling, the hysteresis

where
Analyzing equation (1), it can be observed that the hysteresis can be reduced by decreasing the frictional force, or rather the coefficient of friction, and/or increasing the contact stiffness. Schouten et al. 8 argue that preload variation can lead to a relative movement between the spheres and the grooves. Thus, the same friction force remains. When the surfaces of the V-grooves follow the movement of the spheres, the friction tends to zero, so does the hysteresis. This can be achieved when the V-grooves with elastic hinges are designed. Comparing the V-grooves with elastic hinges with the conventional one, the hysteresis decreased at least 10 times. The same hysteresis phenomenon that occurs in kinematic coupling also occurs in any given fixture systems. However, studies about hysteresis phenomenon in fixture systems have not been addressed. Despite this, the same principle proposed by Schouten et al. 8 can be applied to 3-2-1 fixture.
The stiffness model that represents the stiffness due to the contact between the workpiece and the fixture is shown in Figure 1(a). The equivalent stiffness

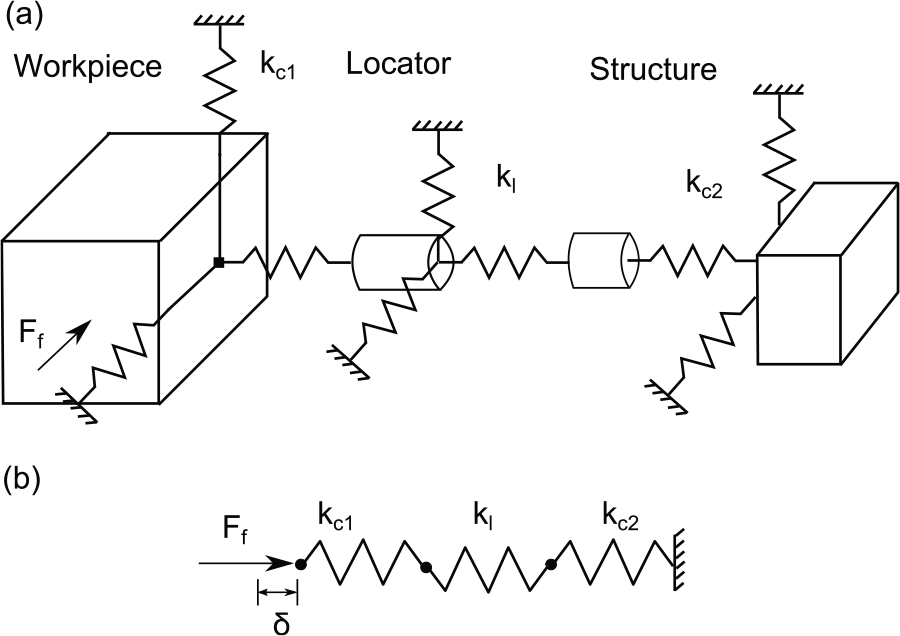
(a) Stiffness model and (b) the equivalent spring model.
Equation (2) is, therefore, a function of contact stiffness between the workpiece and locator
From the above equation, it can be seen that if the one of the stiffness values decreases, the equivalent stiffness also decreases. In the fixture system, this can be achieved by decreasing locator structural stiffness in the tangential direction while the contact stiffness is maintained as high as possible. As a result, the hysteresis decreases and the location accuracy increases.
Experimental setup
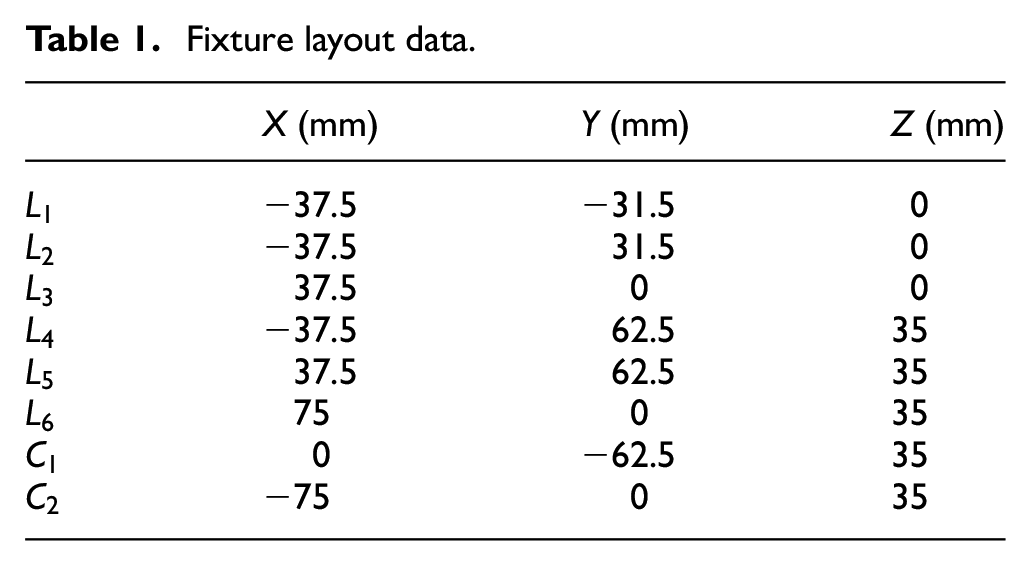
Experiments are performed to investigate the influence of the locator stiffness on workpiece position and rotation as a function of clamping forces. The fixture layout used in the tests is shown in Figure 2(a), consisting of a 3-2-1 workpiece location scheme. On the base plate of dimensions 300 mm × 300 mm × 40 mm, locators
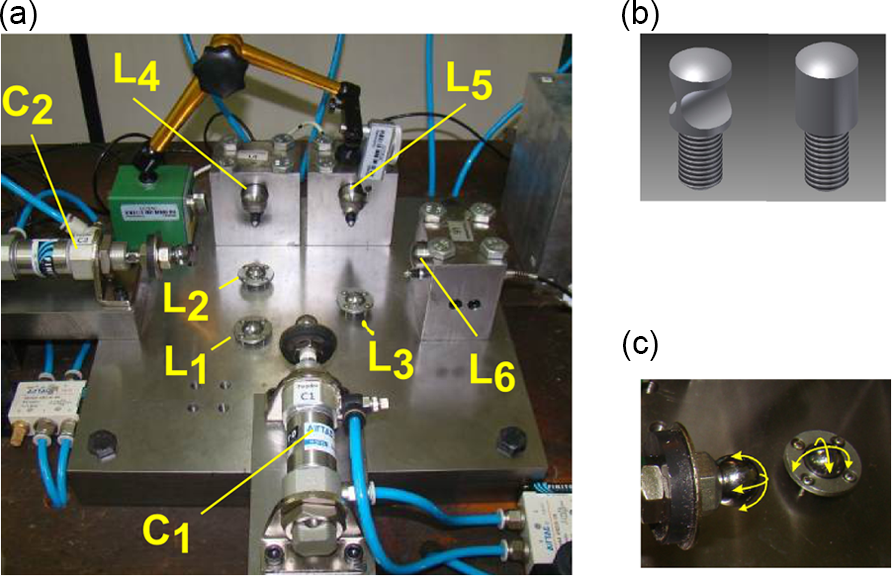
Experimental setup: (a) the location of the fixture elements, (b) flexible and rigid locator and (c) spheres used as locators.
Fixture layout data.
Two flexible locators are designed based on a circular notch flexure hinge, one of
Two pneumatic clamps with an in-line pressure gauge are used to apply up to 375 N. Linear variable differential transformers (LVDTs) with resolution of
At the beginning of each experiment, the workpiece is in contact with all locators. Then, actuator
Experimental results
Figure 3 shows the experimental results of workpiece displacement and rotation as a function of clamping force
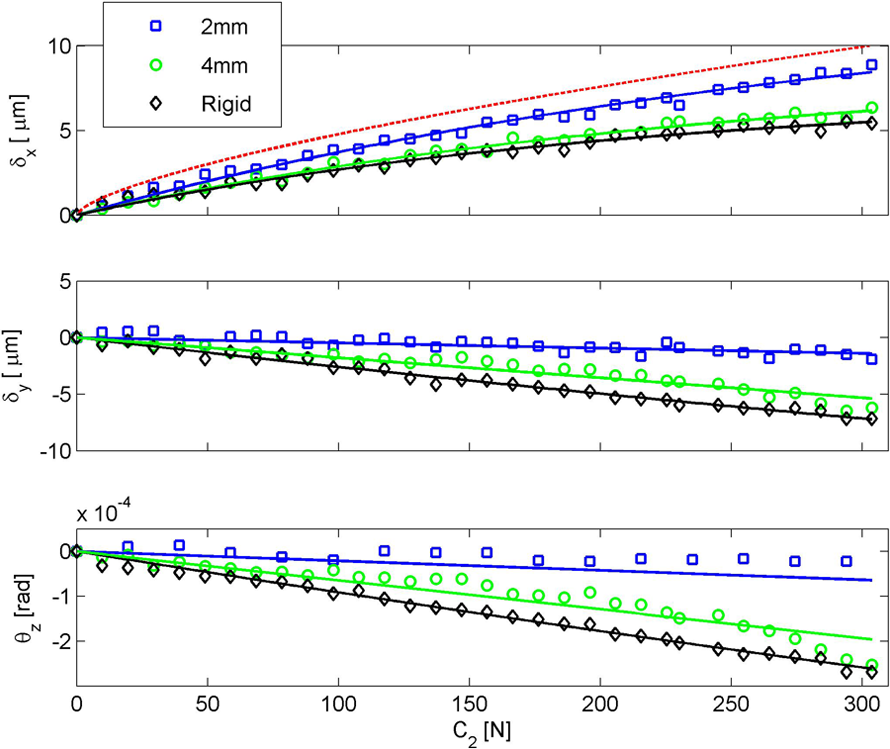
Workpiece displacement and rotation on X-Y plane versus clamping force
Considering the workpiece displacement in X-direction, the experimental results show the same tendency of
In relation to the workpiece position in the Y-direction
Figure 4 presents workpiece position and rotation errors as a function of locator type. The position errors in the X-direction decrease from about
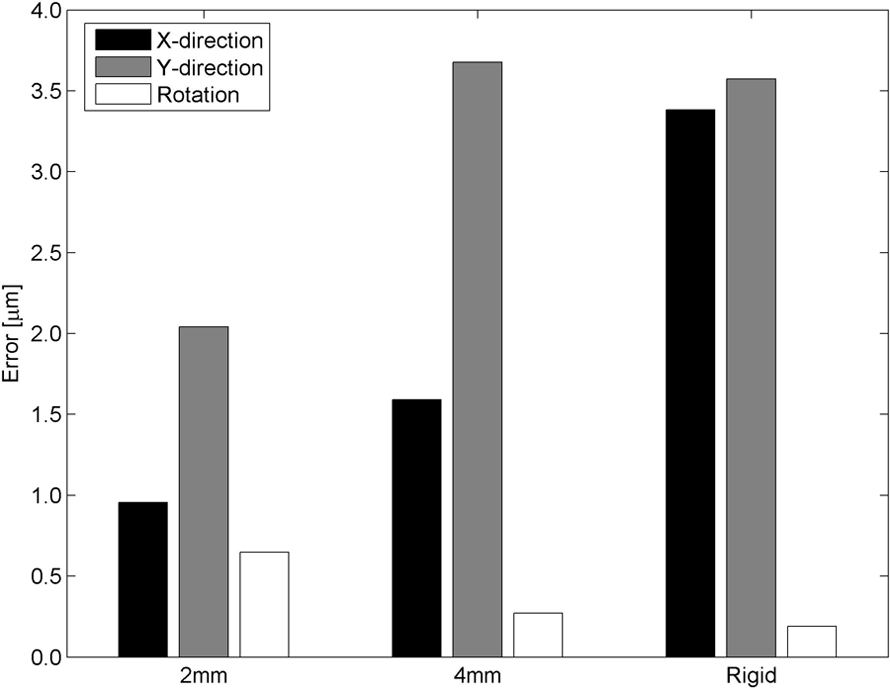
Workpiece positioning and orientation errors as a function of locator type.
With respect to workpiece rotation, the result is the opposite. The rigid locator produces the smallest rotation error, about
Conclusion
Fixture systems are devices used to repeatedly and accurately locate workpieces. However, friction and contact stiffness affect the position and orientation of the workpieces, leading to errors. In this work, locators are designed based on the principle of flexible elements and used in order to increase workpiece location accuracy.
Two flexible locators are positioned in the secondary plane of an especially designed 3-2-1 fixture. Locators with neck thickness of
The best result for the positioning accuracy is achieved for the
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the State of Santa Catarina Research Foundation (FAPESC) Project 4534/2008-9 and National Council for Scientific and Technological Development (CNPq) Project 473615/2011-8.