
Abstract
In the calibration process of the inertially stabilized platforms with a high-precision turntable and an autocollimator, significant calibration errors can result from the axis misalignments between the inertially stabilized platforms and the turntable. Based on the relationship between spatial rotations and quaternions or octonions, this article proposes a representation using octonions to realize the decomposition of the rotation axis in two perpendicular axes and subsequently derives the calibration error model. The test results demonstrated that the error is significantly improved after compensation. The azimuth variance is reduced from 0.1379(°)2 to 0.0492(°)2, which offers a more accurate set of data for further compensation based on the error model of the platform itself.
Introduction
As a vector rotates around a straight line in a three-dimensional (3D) space coordinate system, it is easy to obtain the rotated vector through a rotation matrix.1–5 Inertially stabilized platforms (ISPs) have been widely utilized to maintain its sensor’s orientation pointing to an accurate direction in many applications, such as vehicles, ships, aircrafts and spacecraft. Its accuracy is technically vital and affects the capture, location and tracking of the target.6–9 A two-axial platform is fixed on a high-precision turntable, with an autocollimator showing the rotating angular error,10,11 as shown in Figure 1, where
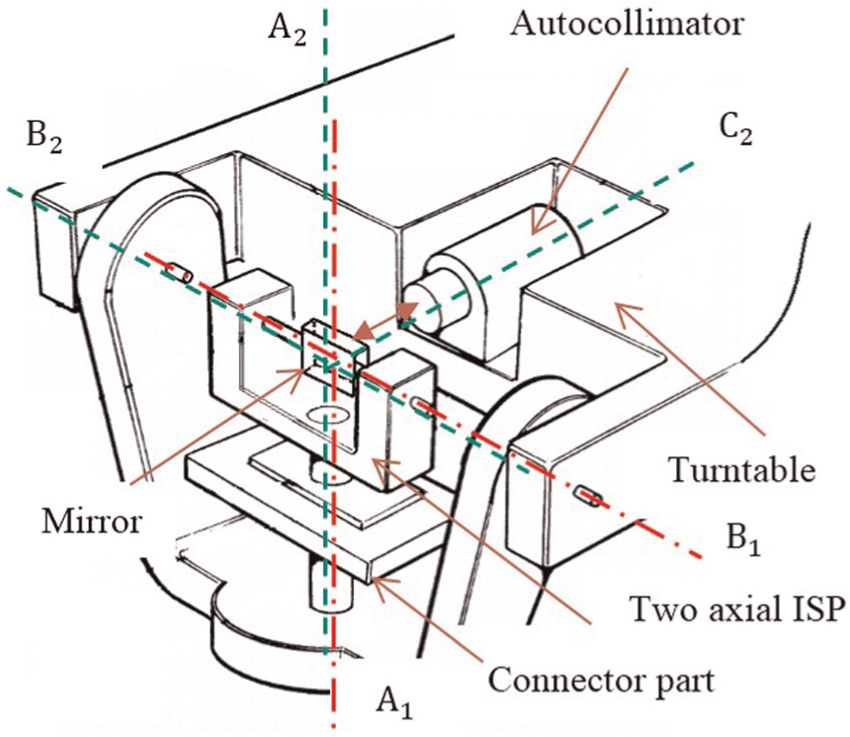
Calibration system of ISPs.
In the calibration process,
This article first presents the notation and definitions of quaternions and octonions and then gives a detailed description of the relationship between rotations and quaternions or octonions. It obtains the spinor with octonions as a vector rotates around an axis by means of decomposing the shaft into two perpendicular axes, which indicates octonions can also be used in rotations. The actual test results have demonstrated that the calibration process error can be effectively compensated.
Quaternions and octonions
Notation and definitions of quaternions
Quaternions are invented by W.R. Hamilton, and they can be used to speed up calculations involving rotations. A quaternion is represented by just four scalars, in contrast to a 3 × 3 rotation matrix which has nine scalar entries. 12 A quaternion can be defined as 13

where

Let

where
Given another quaternion

where
Assume

The norm of the quaternion

The quaternion



An arbitrary quaternion

where
Quaternions and rotations
Let S be an arbitrary inertial reference frame with

The resulting vector

where
Proof
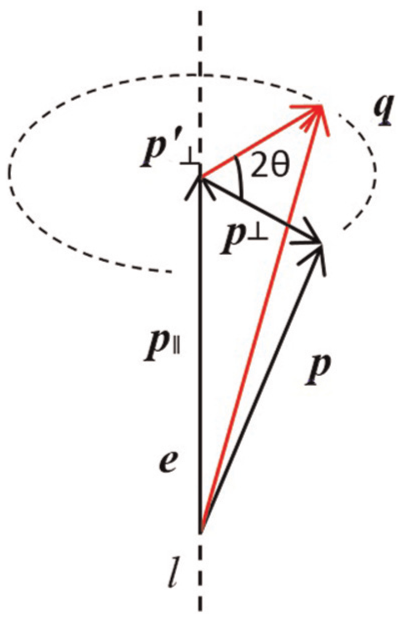
As shown in Figure 2, the vector

where

It is easy to know that


Combined with equations (12), (14), (15) and (16), we obtain
which is in accord with equation (11); thus, quaternions can be used to describe the rotations.
Schematic diagram of rotation.
Definitions of octonions
Similar to quaternions, the octonions are an eight-dimensional (8D) algebra with bases
Octonion multiplication table.
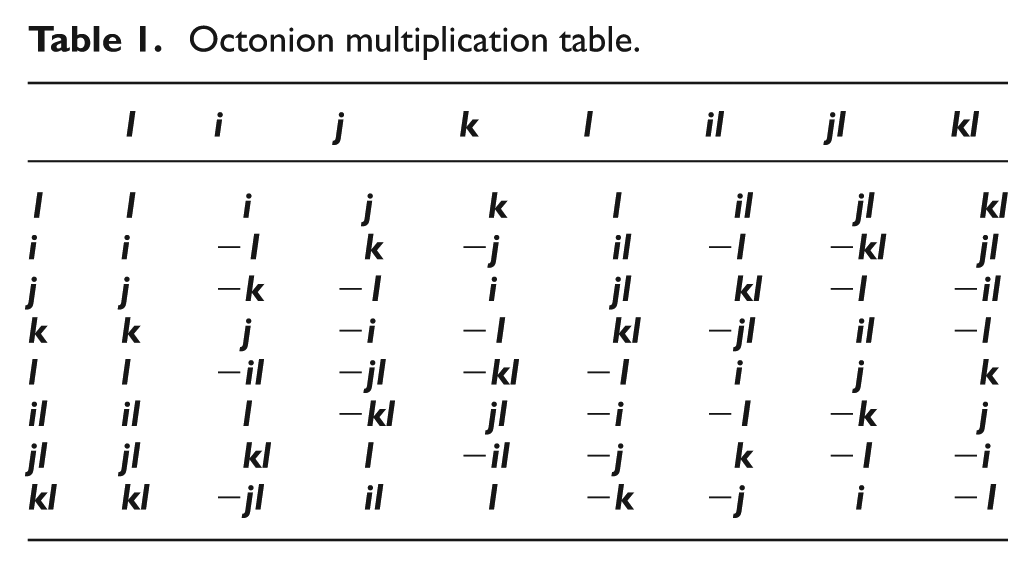
It is obvious that the octonions are nonassociative since

where
Suppose

The first four items of octonions in equation (18) are just a quaternion, which can represent a spatial position rotation in a three-dimensional (3D) space.
The octonion’s space can be denoted by the quaternion’s space combined with a mirror
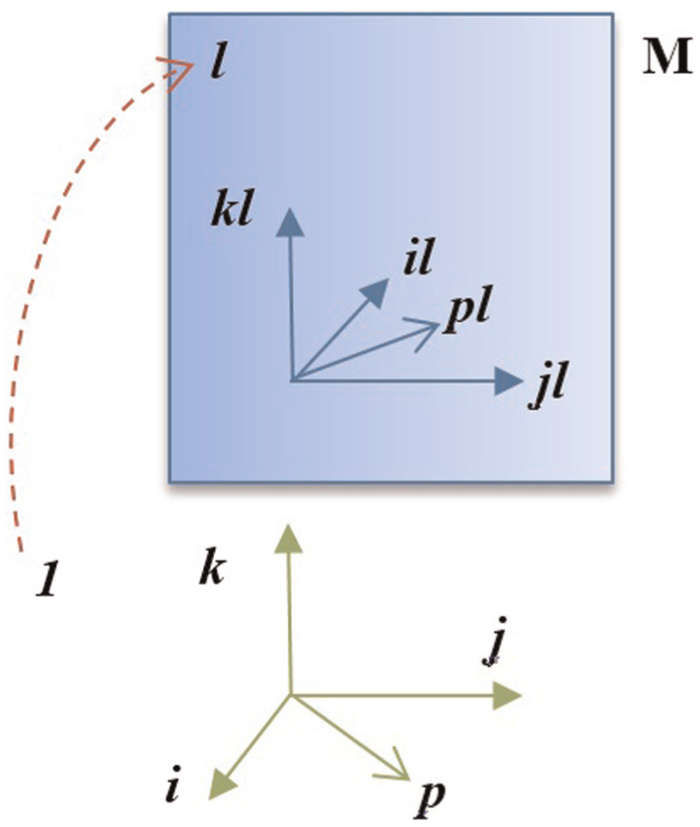
Octonion description by employing a mirror.
In Figure 3,
Rotations and octonions
Since the octonions were discovered independently by Arthur Cayley in 1845, one of the most familiar applications is to describe the process whereby an electron emits or absorbs a photon, 16 where it can be used to describe the spinor.
Octonions in 3D coordinate system
In Figure 2, the resulting vector
In Figure 4, assume



where
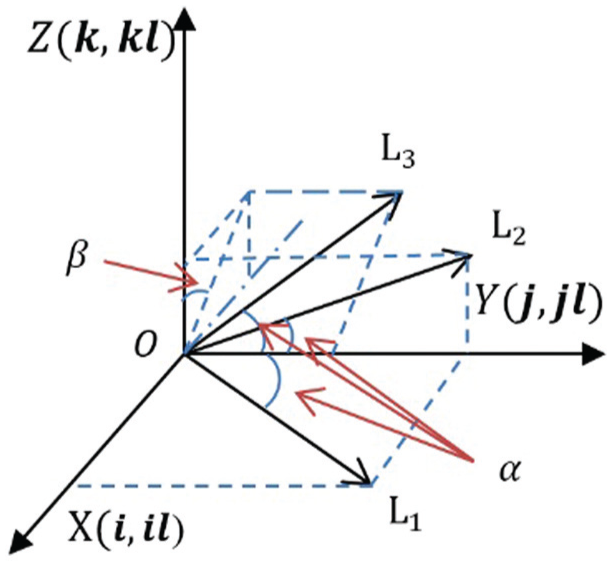
3D coordinate system.
It is obvious that
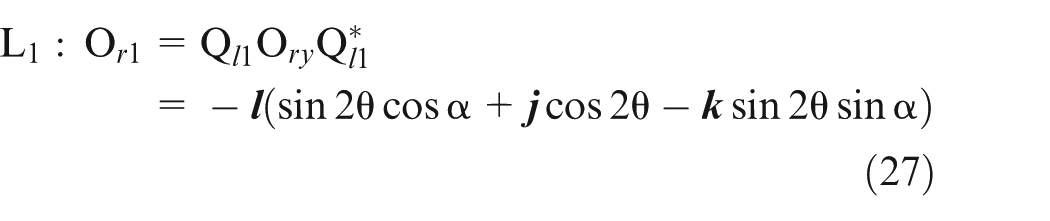
Suppose three lines



where
Define an octonion

where
Suppose that
where
The results indicate that
Arbitrary nonorthogonal rotation
An arbitrary nonorthogonal rotation can be shown in Figure 5,
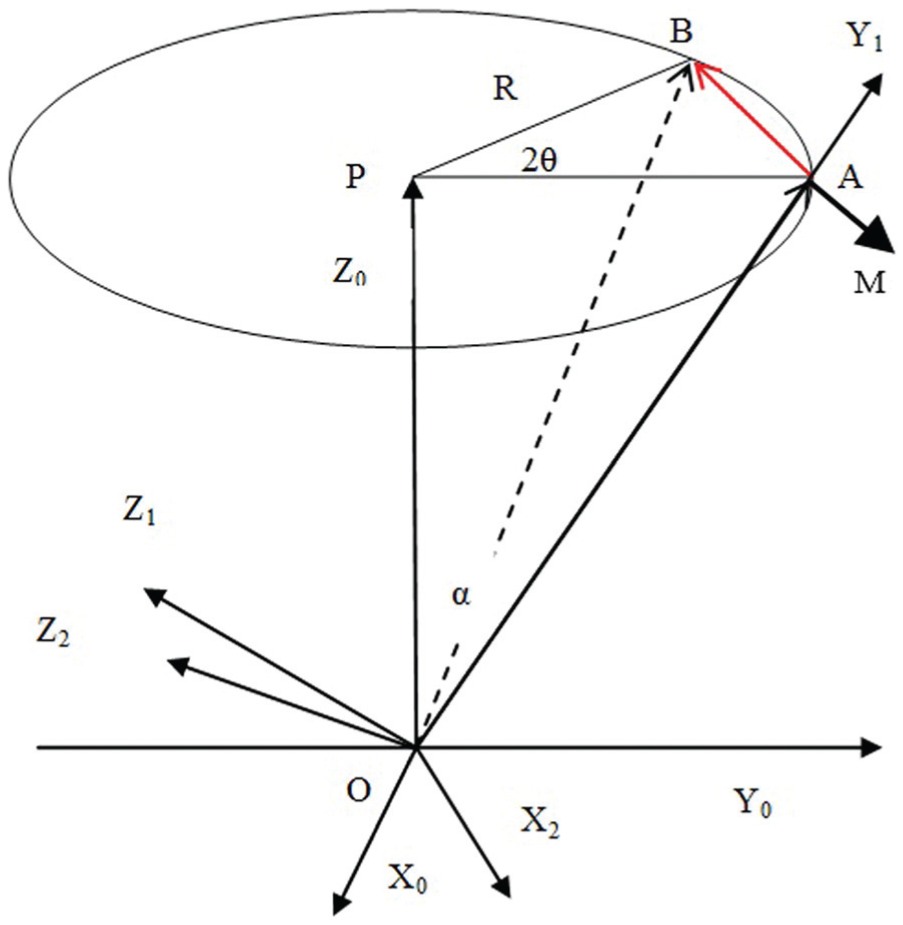
Arbitrary nonorthogonal rotation.
In the coordinate system
where
Meanwhile, in the coordinate system

where
From
According to Figure 5, it is facile to find that
Calibration error analysis
In section “Rotations and octonions,” the rotation has been realized by means of decomposing the axes, compared to the decomposition of the rotated vector described in section “Quaternions and octonions.” In Figure 6,
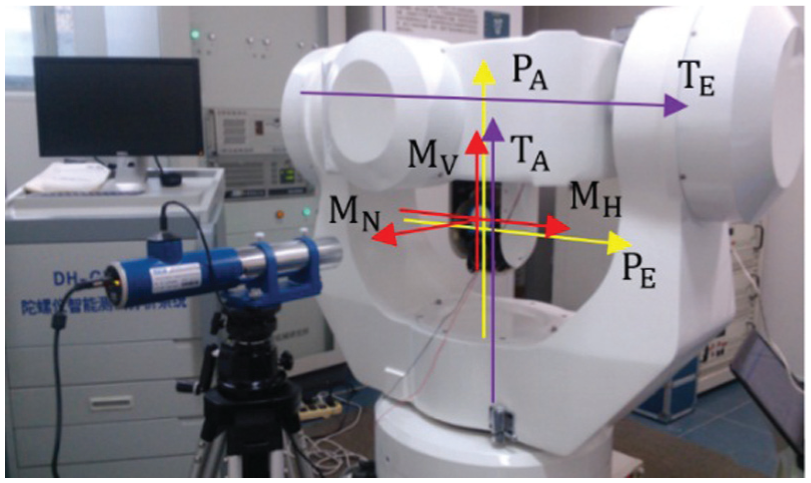
Experimental setup and data acquisition system.
As described in section “Introduction,” the azimuth and elevation angles are defined for the platform (

With
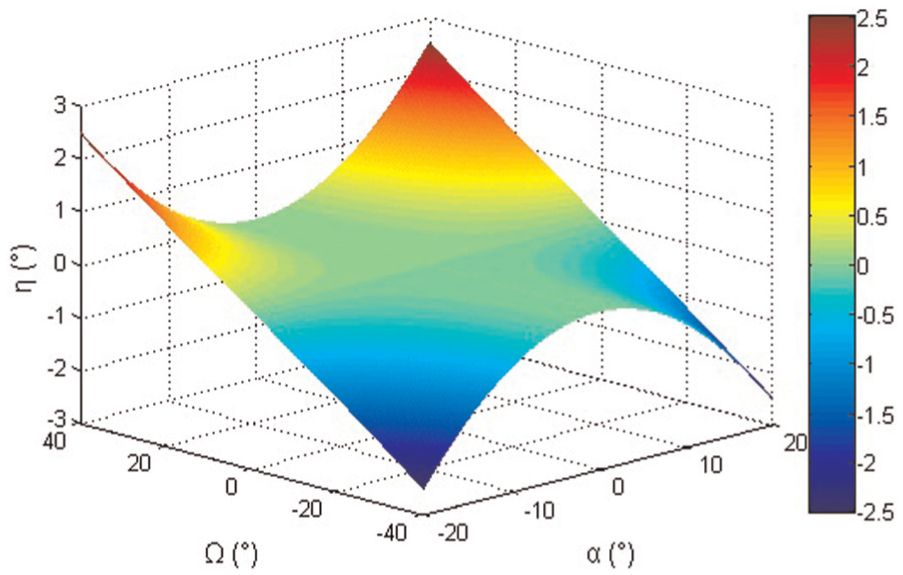
Calibration error’s effect.
Experimental results
The pointing errors have been acquired with a high-precision turntable and an autocollimator at the azimuth of −20°, −15°, −10°, −5°, 0°, 5°, 10°, 15° and 20° and at the elevation of −20°, −15°, −10°, −5°, 0°, 5° and 10°. The compensation results calculated by equation (34) (the elevation angle is
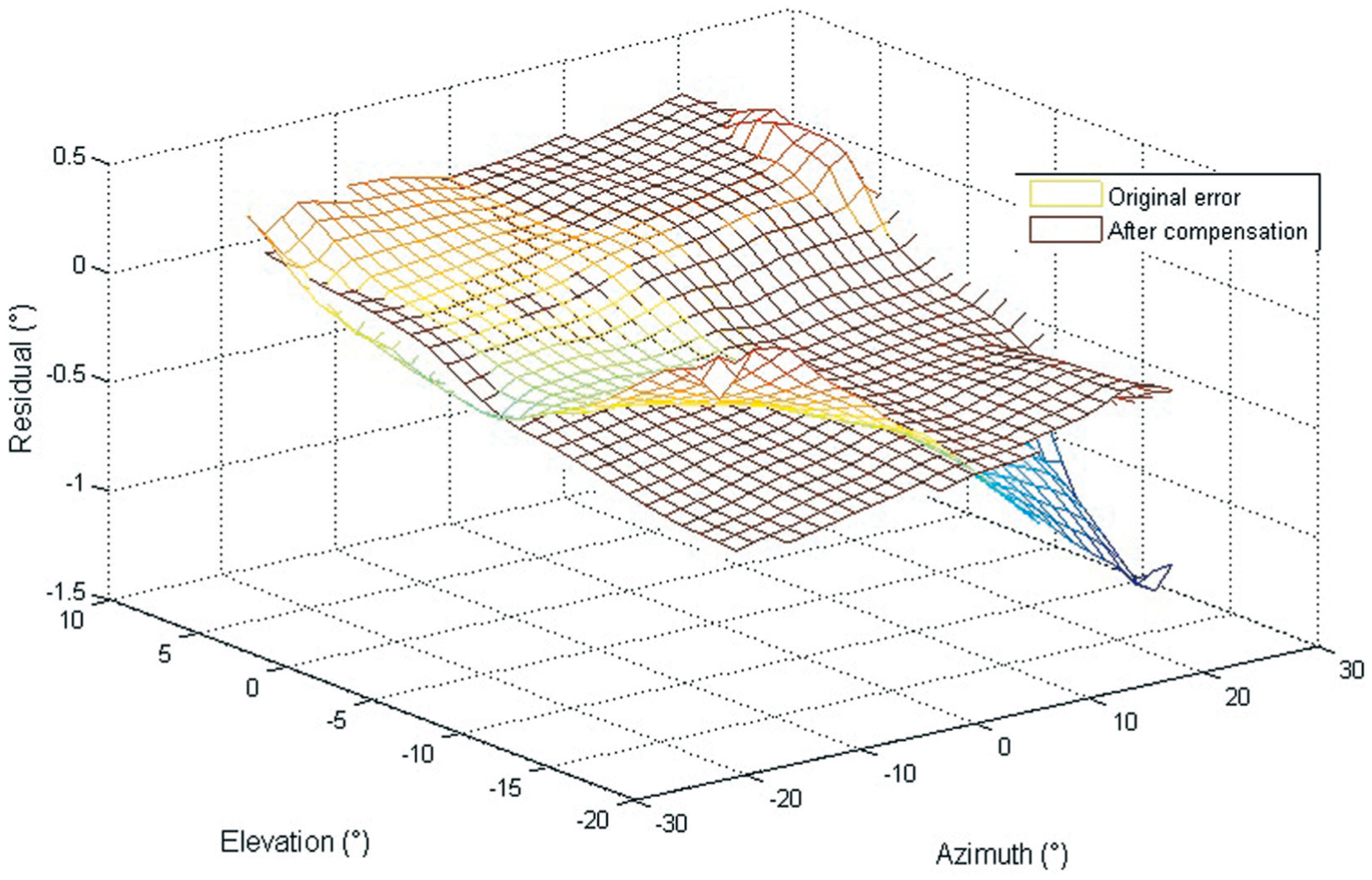
Azimuth error before and after compensation.
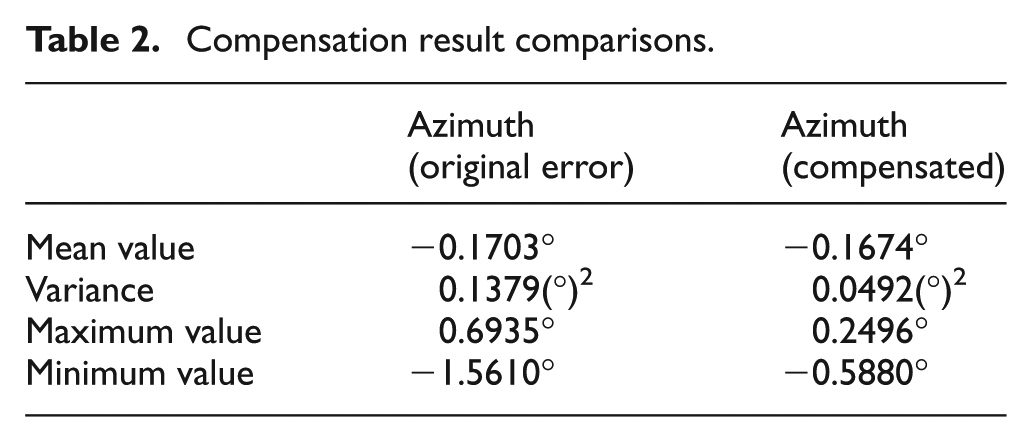
Compensation result comparisons.
Conclusion
With respect to the ISPs, calibration process with a high-precision turntable and an autocollimator, this article has developed a novel approach to the rotation decomposition to determine the calibration errors. It has shown that octonions can represent the rotation process completely, including the rotation around a space vector and the spinning around itself. It has realized a new representation of the rotation by means of decomposing the rotation axis into two perpendicular axes. The error in the calibration process is then derived. According to the test results, the accuracy after error correction is significantly improved with the variance in azimuth decreased from 0.1379(°)2 to 0.0492(°)2, which offers a more accurate set of data for further compensation based on the error model of the platform itself.
Footnotes
Declaration of conflicting interests
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
This work was sponsored by the Support Program of National Ministry of Education of China (no. 625010110) and the National Natural Science Foundation of China (no. 61179043).