
Abstract
In this article, a path planning algorithm for nonholonomic mobile flexible manipulators is presented that computes the robot trajectory by maximizing pose stability measures. Zero moment point criterion is used as a performance index for the system stability, which regards the mass moment of inertia of the mobile base. In dynamic analysis, an efficient model is employed to describe the treatment of flexible structure, in which both the geometric elastic nonlinearity and the foreshortening effects are considered. The optimization strategy is based on the indirect solution of the open-loop optimal control problem. Necessary optimality conditions in the form of Pontryagin’s minimum principle are established, which leads to a standard form of a two-point boundary value problem. A new objective function is proposed to improve stability for mobile flexible robot. In order to initially check the validity of the dynamic equations, the proposed model has been implemented and tested on a fixed-base flexible arm undergoing large deflection. A simulation study has been carried out to investigate further the validity and effectiveness of the mobile flexible manipulators on finding the optimal path between two points with stability consideration. The results clearly show the effect of flexibility and tip over stability on the mobile manipulators.
Introduction
Mobile manipulators that are required to have a long reach, fast motion, and reduced weight typically also possess significant structural flexibility. For example, mobile flexible manipulators have important application in the space station, manufacturing automation, nuclear contaminated environments, and many other areas. A common task for such mobile manipulators, referred to as a point-to-point maneuver, is to move the end-effector starting from the current configuration and stopping at a given final configuration. Furthermore, the effect of the manipulator, the payload movement, and moving on an uneven terrain may cause the base to turn over, particularly for mobile flexible manipulator when operating high speed with long arm. For such systems, to do an effective use of robotic systems, it is important to consider the path planning optimization of the system for increasing stability in point-to-point maneuvers, since it increases the applicability of robotic systems. However, the dynamic coupling effect between the manipulator and the mobile platform is challenging due to flexibility and kinematic constraints. An efficient model is employed to describe the treatment of flexible structure, in which both the geometric elastic nonlinearity and the foreshortening effects are considered. In this investigation, the optimization strategy is based on the indirect solution of the open-loop optimal control problem. Optimal control is a powerful tool which can be used in both open-loop and closed-loop strategies. In the open-loop optimal control, in contrast to the closed-loop ones, many difficulties like system nonlinearities and all types of constraints can be considered because of the off-line nature of the open-loop optimal control. The indirect solution method is based on Pontryagin’s minimum principle (PMP) which is a set of necessary optimality conditions.
Many researchers have studied the mobile manipulator’s problems during the last few years.1–3 The dynamic model for links in most of these researches is often based on rigid or small deflection theory, but for applications like light-weight links, high-precision elements, or high speed maneuver, it is necessary to capture the deflection caused by nonlinear terms. Seraji presented a simple online approach for motion control of mobile manipulators using the combined Jacobian matrix. The proposed approach is extended to exploit the redundancy introduced by the base mobility to perform a set of user-specified additional tasks during the end-effector motion, which is equally applicable to holonomic and nonholonomic mobile robots. 1 Yamamoto and Yun 2 focused their research on the modeling and compensation of the dynamic interaction between the manipulator and the mobile platform of a mobile manipulator and developed a coordination algorithm based on the concept of a preferred operating region. Korayem et al. studied the effects of highly coupled dynamic interaction between the manipulator and vehicle. A new method using hierarchical optimal control for path planning and calculating maximum allowable dynamic load of wheeled mobile manipulator is presented. 3
Shaker and Ghosal considered nonlinear modeling of planar flexible manipulators with one and two revolute joints using the nonlinear finite element mathematical models. The motion equations of the systems are derived taking into account the nonlinear strain-displacement relationship. 4 Damaren and Sharf have presented and classified the different types of inertial and geometric nonlinearities in the dynamics equation for flexible multibody systems. They observed that for sufficiently fast maneuvers of the flexible-link manipulators, the ruthlessly linearized approximation is wholly inadequate. 5 Omar and Shabana developed an isoparametric shear-deformable two-dimensional beam element based on the absolute nodal coordinate formulation (ANCF) in which the elastic forces are determined using a general continuum mechanics approach. The use of the continuum approach leads to a simple expression for the elastic forces as compared to the use of local element frames. While the model accounts for the combined effects of shear deformation and rotary inertia, the finite element has zero Coriolis and centrifugal forces and leads to a constant mass. 6 Jiang et al. 7 presented a new motion planning approach, including reversal maneuvers, for car-like robots subject to nonholonomic constraints.
Several articles have tried to design the path planning problem for rigid and flexible manipulators. For instance, Wang et al. 8 had solved the optimal control problem with direct method using the B-Spline functions in order to determine the maximum payload of a rigid manipulator. Wilson et al. 9 formulated path planning of a flexible manipulator as a discrete time open-loop optimal control problem, the solution of which is done via discrete dynamic programming. Korayem and Nikoobin used the indirect solution of the optimal control problem to determine the dynamic load capacity of a flexible-link manipulator. The PMP has been used for path planning of the flexible-link manipulator. 10 Park considered the motion profiles of the joints as a Spline or polynomial functions. Then, parameters of the function have been obtained in order to reduce the residual vibration of flexible manipulators at the end of the motion. 11
Some researchers have studied the stability of mobile manipulators. Papadopoulos and Rey have proposed a new tip over the stability measure, the Force–Angle stability measure, which is easily computed and sensitive to top-heaviness. The proposed measure has a simple geometric interpretation and is applicable to dynamic systems subjected to inertial loads and external forces. 12 Li 13 has used the normal forces between the rear/front tires and ground for checking the static and dynamic stability of mobile manipulators. Moosavian and Alipour presented moment-height stability (MHS) measure to prevent overturning of a mobile manipulator. This measure is based on stabilizing and destabilizing moments exerted on the moving base which provides the system mobility. 14 The other approach is zero moment point (ZMP), which, for the first time, Huang et al. 15 employed for the tip over prevention of mobile manipulators. The valid stable region has been investigated for a mobile manipulator based on the ZMP criterion. However, the inertia effect of the rigid body has not been considered. Kim et al. 16 have proposed an online compensation algorithm to include the mass moment of inertia for original formulation of ZMP for the dynamic stability of the mobile manipulators.
In most of the previous works, flexibility and stability of the wheeled mobile manipulator in the path planning problem have not been considered. Hence, this article proposes a method for planning the trajectory of the nonholonomic mobile flexible manipulator for increasing stability and considering the effect of flexibility to achieve the specified point-to-point maneuver. First, the finite element method is used to derive dynamic equations of a mobile flexible manipulator. The strain energy is formulated in accordance with the slender beam theory, and various nonlinear terms are identified, in which both the geometric elastic nonlinearity and the foreshortening effects are considered. Then, the Hamiltonian function is formed and the necessary conditions for optimality are derived from an indirect solution of the open-loop optimal control problem by using the PMP. The obtained equations lead to a standard form of a boundary value problem which is solved by numerical techniques. Moreover, by applying the ZMP criterion as an index for the system stability, one can obtain optimal trajectory with attention to overturning stability constraint. Finally, in order to verify the effectiveness of the proposed approach, several experiments on a fixed-base flexible arm have been carried out and several simulation studies on a nonholonomic wheeled mobile manipulator are performed and optimal paths with increasing stability and minimum effort are obtained. The obtained simulation results demonstrate the accuracy and merits of the proposed method.
Kinematic and dynamic model of the mobile flexible manipulator
In this section, for the sake of modeling and analysis, a mobile flexible manipulator comprising a manipulator flexible arm mounted on a nonholonomic mobile base is considered, as shown in Figure 1. The considered system consists of a 5-degree of freedom (DOF) mobile base and two (ni
+ 1)-DOF serial manipulator arms, where
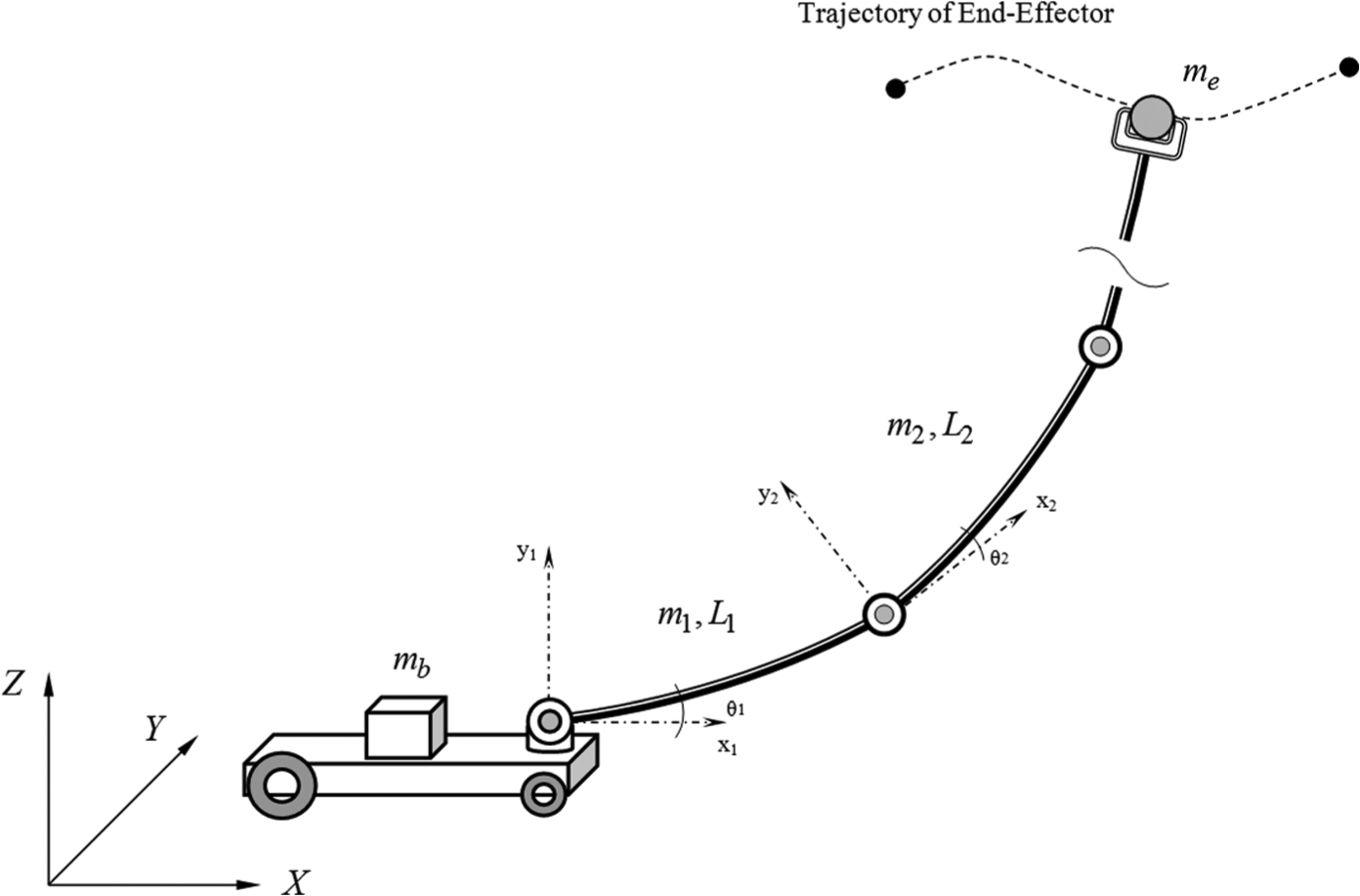
Schematic view of a mobile flexible manipulator.
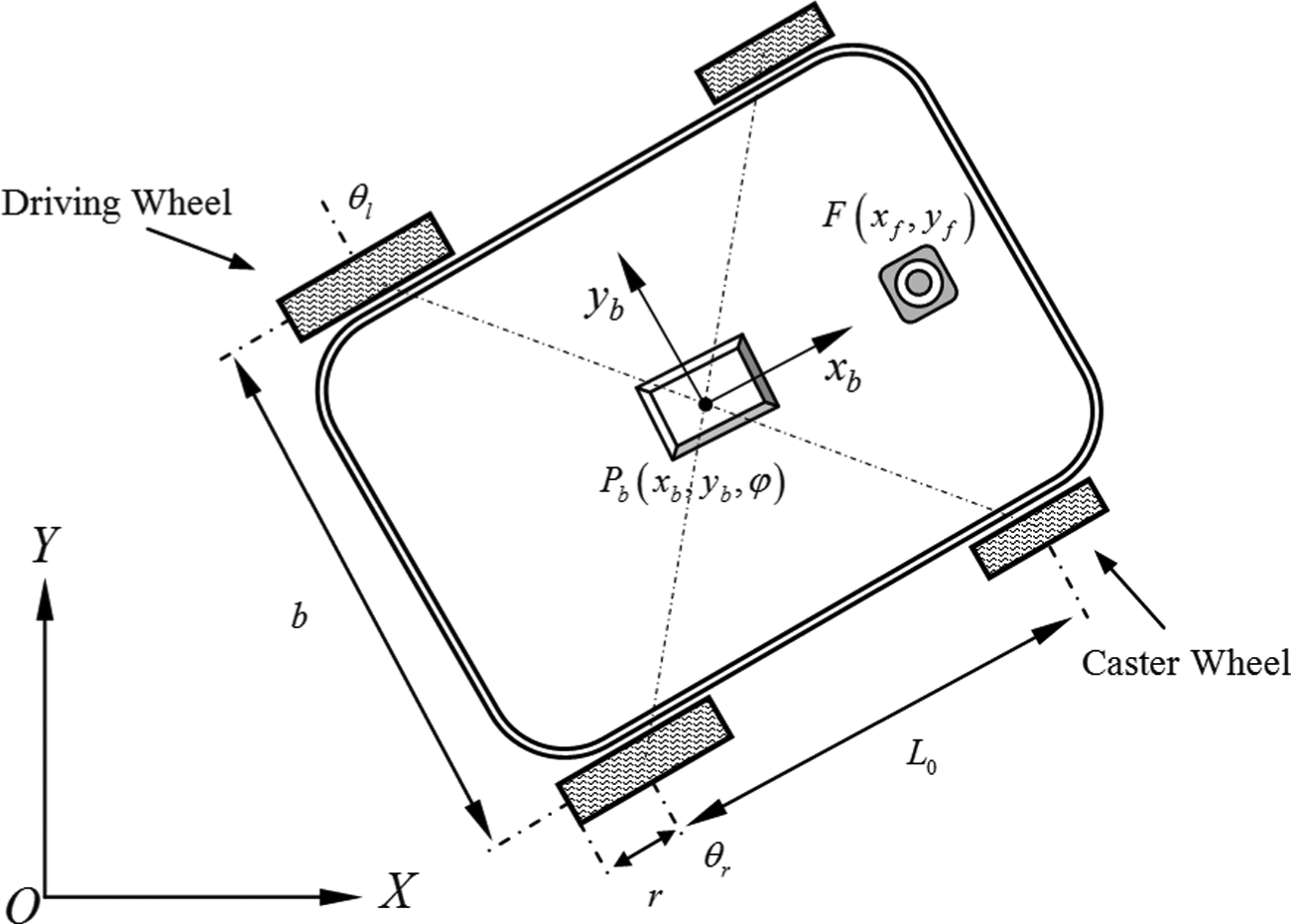
Nonholonomic wheeled mobile robot platform.
The analysis of the flexible link can be modeled by slender elastic beams. In this investigation, a more efficient computationally model is employed, in which both the geometric elastic nonlinearity and the foreshortening effects are considered. The model takes into account a distinction between the longitudinal displacement due to axial deformation, denoted as

The assumed field of displacements for

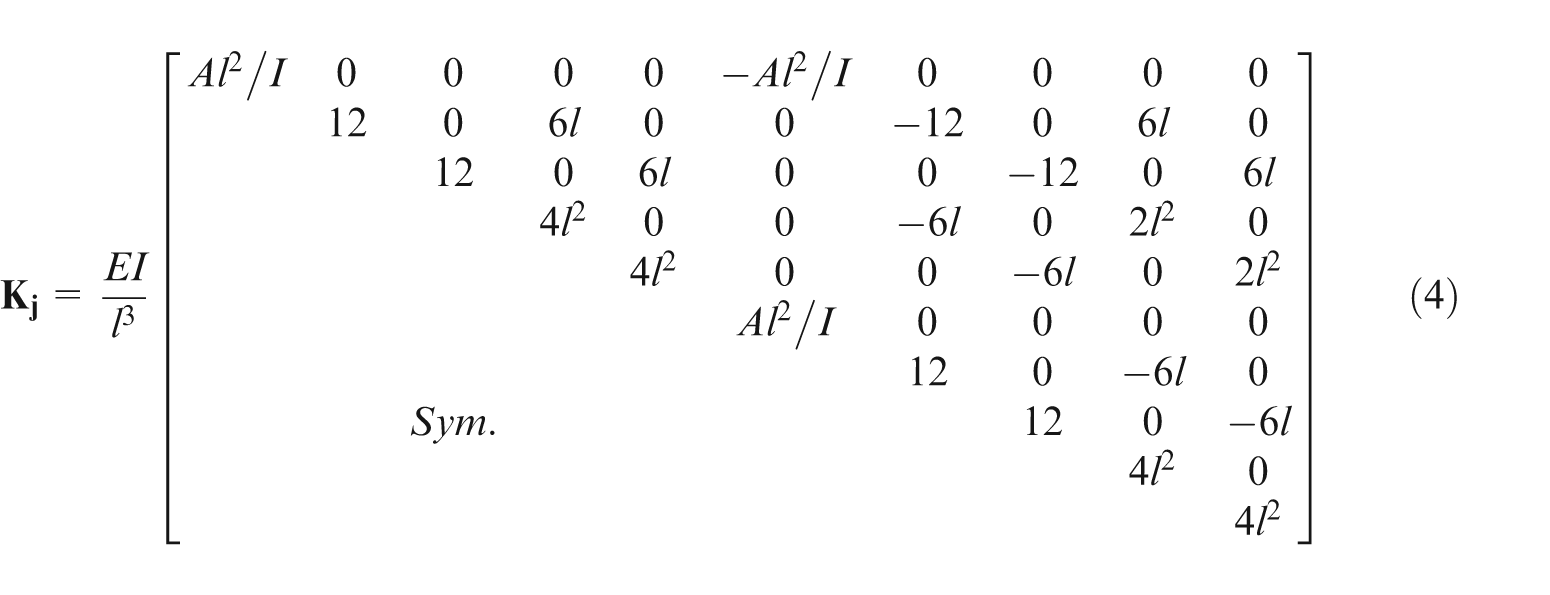
The general expression of the strain energy is written in terms of
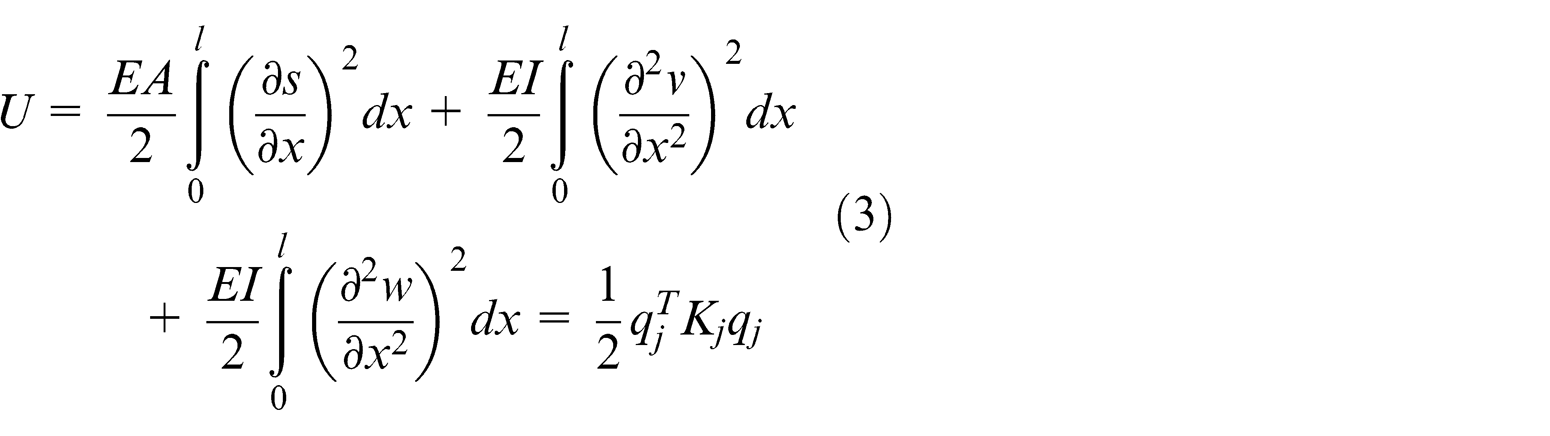
where
The Lagrangian method is utilized to formulate the dynamic equations governing the motion of the mobile flexible manipulator systems. In order to derive dynamic equations, the kinetic energy and the potential energy are computed for the entire system. The kinetic energy for the overall system is obtained by computing the kinetic energy for each element ij and then summing over all the elements. The potential energy of the manipulator is obtained by computing the strain energy for each element ij due to elasticity and gravity of any link. After calculation of these energies, by applying the Lagrangian multipliers procedure and performing some algebraic manipulations, the compact form of the governing equations of two-link flexible mobile manipulator can be obtained from
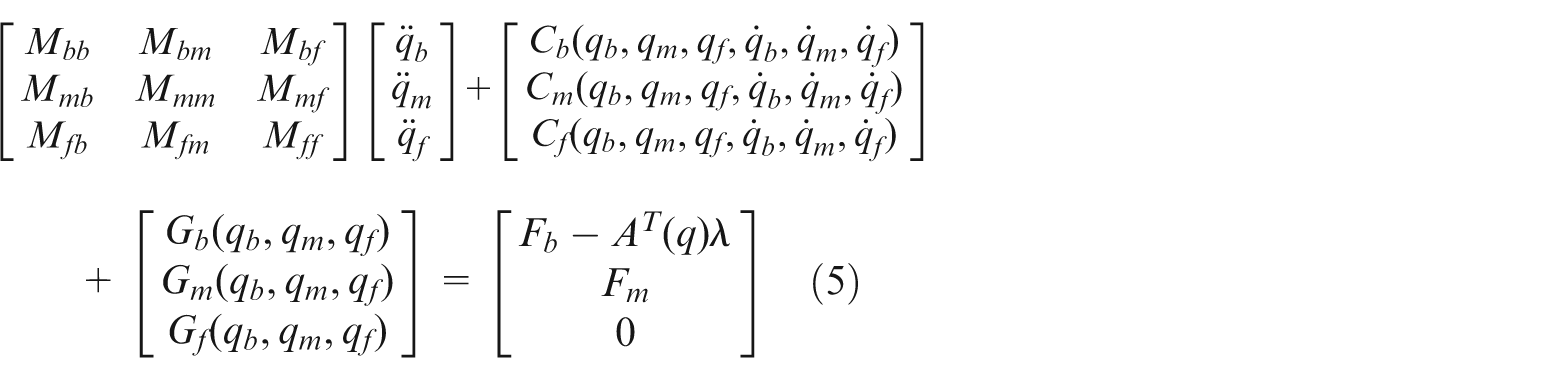
where


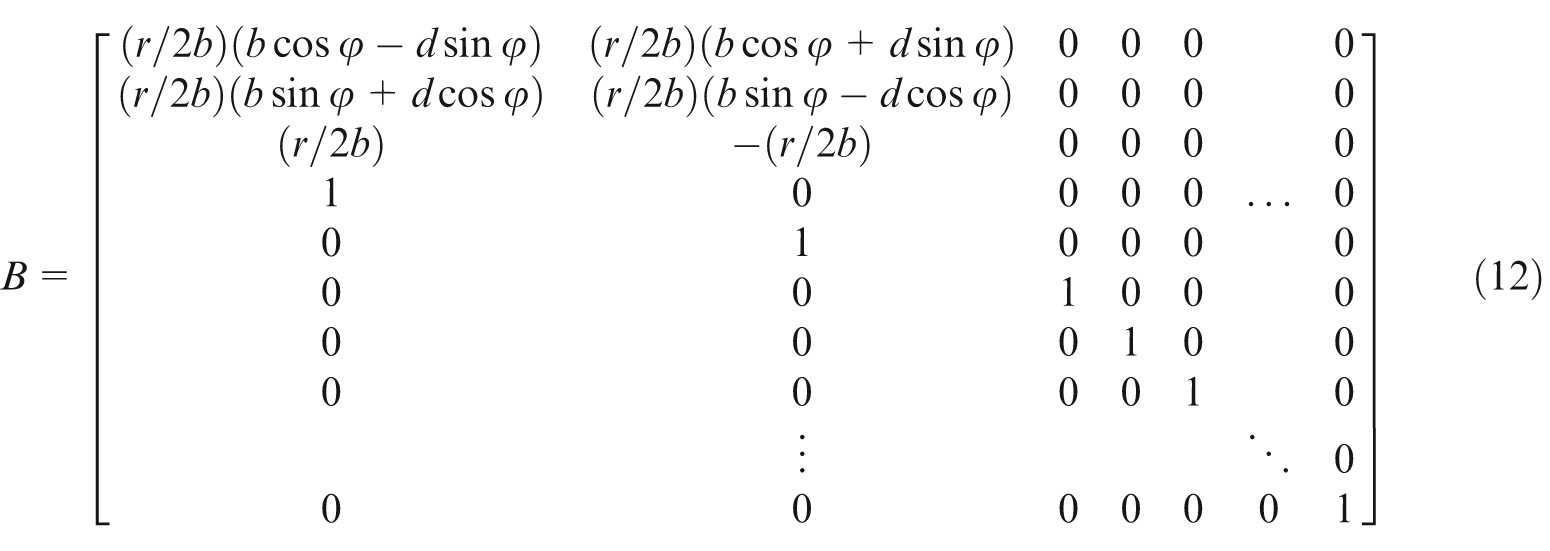
The nonholonomy in mobile robotics causes some difficulties in modeling and motion planning, but it reduces the number of driving motors needed for the motion of the platform, and a nonholonomic mobile platform is more cost-efficient. There are three constraints in motion of the nonholonomic mobile platform: the first one is that the platform must move in the direction of the axis of symmetry and the other two constraints are the rolling constraints not allowing them to slip.
The nonholonomic constraints to which the platform is subjected are given as



The three constraints can be written in the compact form

and

Where r is the radius of the driving wheel, b is the distance of two wheels, and d is the distance between front and rear wheels.
By defining the

One choice of
As well,

where

By differentiating equation (13)

After performing some algebraic manipulations, the dynamic equation of the mobile flexible manipulator is

Finally, the dynamic equations in the state space form considered in this article are as follows

By using these equations, the optimal trajectory planning problem can be formulated.
Optimization strategy
Path planning in case of mobile flexible manipulator is complex due to the flexibility of the manipulator arm. In this section, an indirect solution of optimal control problem is applied for the off-line global trajectory planning of mobile flexible manipulator. In comparison with other methods, the open-loop optimal control approach provides a powerful tool for designers to create various optimal paths via defining the proper performance measure.
The purpose of the optimal control problem is to determine the control
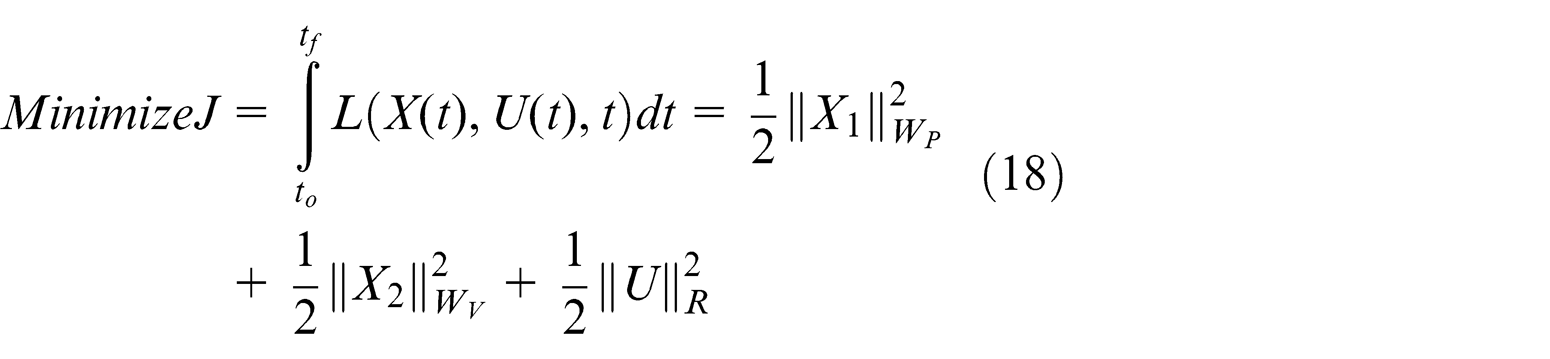
Here, the integrand
In order to minimize the objective function subjected to the nonlinear dynamic equations, the well-known PMP is used, and by introducing the costate vector

The PMP then implies that a necessary condition for a local minimum is that



The optimal trajectory is then obtained by solving the 2n differential equations. The set of dynamic equations, the governing optimal control problem, and the boundary conditions lead to a standard form of a two-point boundary value problem (TPBVP). The collocation method is one of the basic ways of solving TPBVP

In this study, bvp4c command in MATLAB® which is based on the collocation method is used to solve the obtained problem. The details of the numerical technique used in MATLAB to solve the TPBVP are given by Shampine et al. 19 The method iterates on the initial values of the costate until the final boundary conditions are satisfied by the following desired accuracy

Now, by using the solution of obtained TPBVP, an algorithm is presented in Figure 3 in order to find the optimal paths
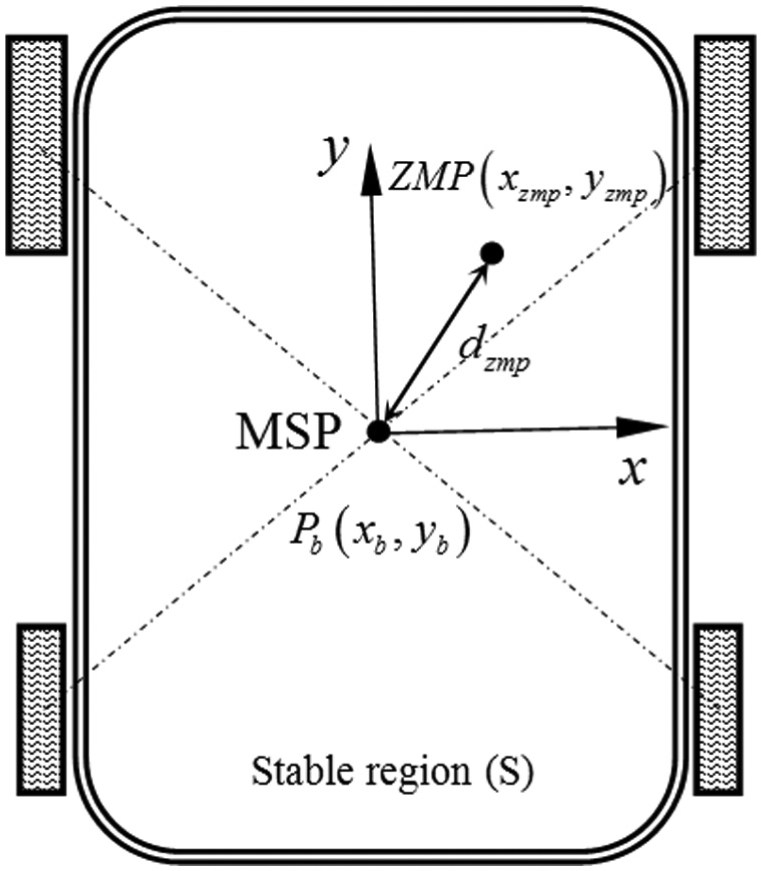
Schematic diagram of the stable region.
Formulation of stability constraint
In order for mobile flexible manipulators to successfully carry out tasks, especially in carrying heavy loads on different trajectories, the concepts of the stability degree and the valid stable region become very important to avoid tipping over. Therefore, estimation and evaluation of dynamic stability with an appropriate criterion throughout the motion of such system is a fundamental necessity.
The stability margins could be enlarged by making a bigger platform; it also has a direct relation with the position of casters, but when the size of the platform must be smaller, the stability is critically argued. However, concepts of the stability degree and the valid stable region can be presented based on the ZMP criterion. 16 ZMP is defined as that point on the ground at which the net moment of the inertial forces and the gravity forces has no component along the horizontal axes. Each component of ZMP can be presented as 16


where the index i denotes parts of the robot and
In order for the mobile flexible manipulator to be always stable, ZMP must be within the stable region. The stable region is a quadrangle, and it is expressed with the position relation between the wheels and the casters (see Figure 3). Here, MSP is the Most Stable Point defined as the center of the contact polygon between the platform and the ground. The distance from MSP, base position

Therefore, the objective function for increasing stability can be defined as
Simulation and experimental results
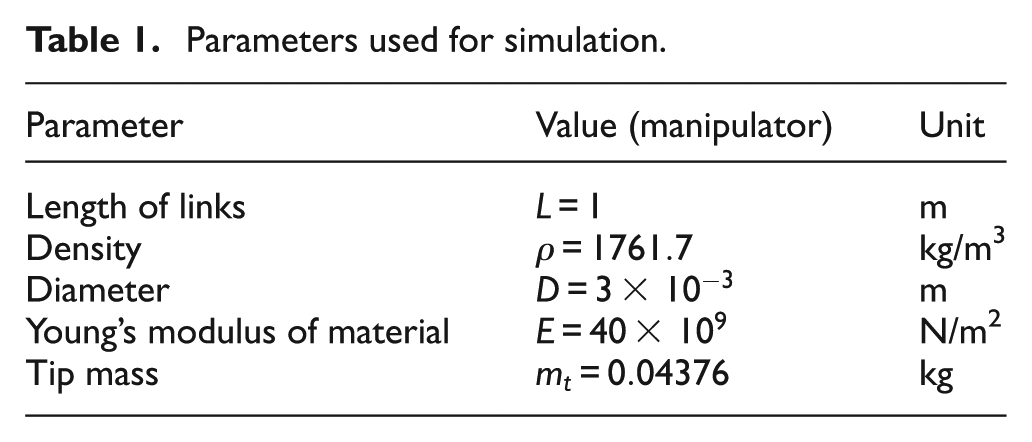
In this section, numerical and experimental results are presented to show the validity and effectiveness of the proposed approach. In order to initially check the validity of the dynamic equations and the response of the system, simulation is performed on a single-link very flexible arm as shown in Figure 4. One end (base) of the flexible link made of fiberglass is attached to a Harmonic Drive mini servo DC motor which has a reduction relation n = 50. At the other end (tip), there is a disk mass that can freely spin on its vertical axis by means of a bearing in order to prevent the apparition of torques at the tip. The physical characteristics of the link and the tip mass are specified in Table 1. The tip load of the link is a disk floating over an air table which allows us to cancel the effects of gravity and makes the friction of the movement almost inappreciable. The system sensor is integrated by an encoder embedded in the motor and a camera-based system for three-dimensional (3D) position measurement. The first one allows for knowing the motor angle with a precision of 0.7 × 10−4 rad. The second one consists of a set of three cameras that gives the tip position and the base position by means of a pair of spherical markers which reflect the infrared light. The precision of this system is 0.3 mm. The motor angular trajectory prescribed for this maneuver is shown in Figure 5. The maneuver of the motor is 1 rad with constant velocity 1 rad/s that it can lead to produce very large deflections. The obtained tip position in Cartesian is compared with the experimental results in Figures 6 and 7. The results are in good agreement with the experimental responses.

The very flexible arm setup on the air table.
Parameters used for simulation.
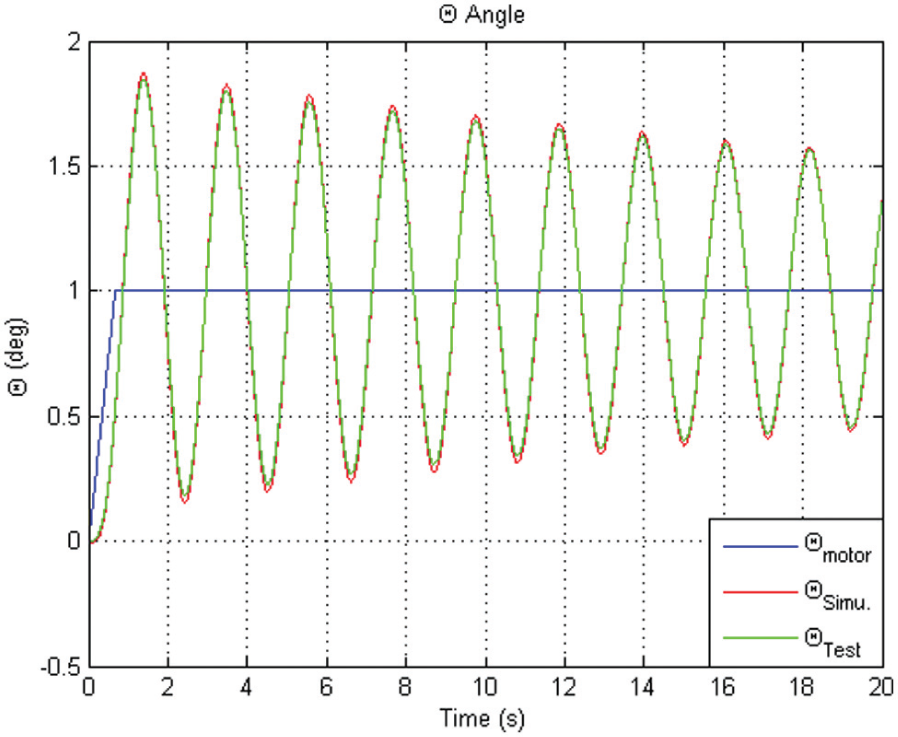
The motor and tip angular positions.
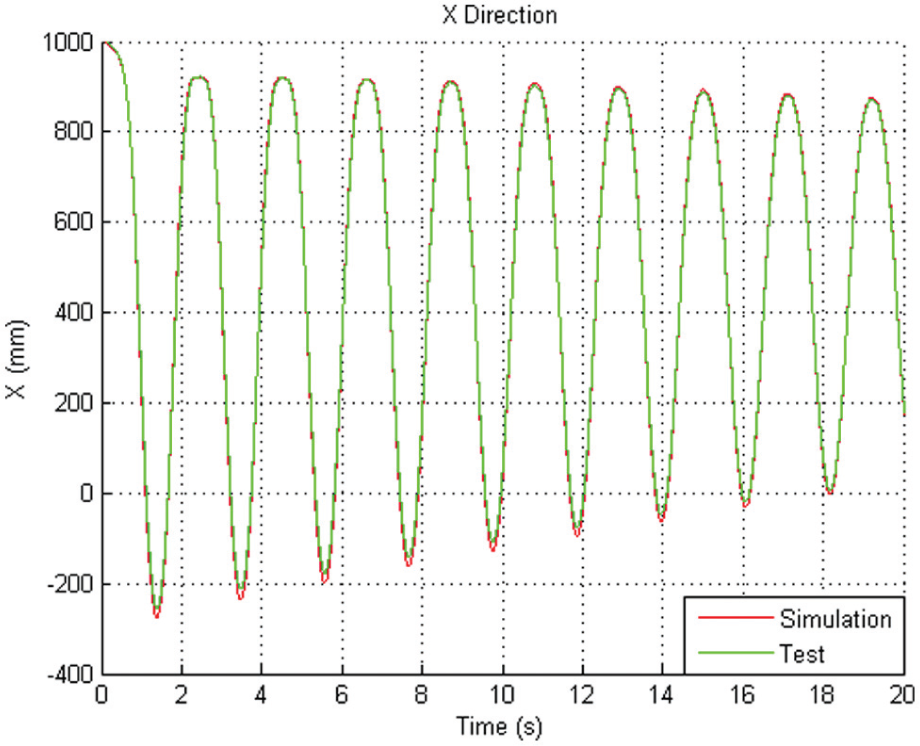
Displacement of the tip in X direction.
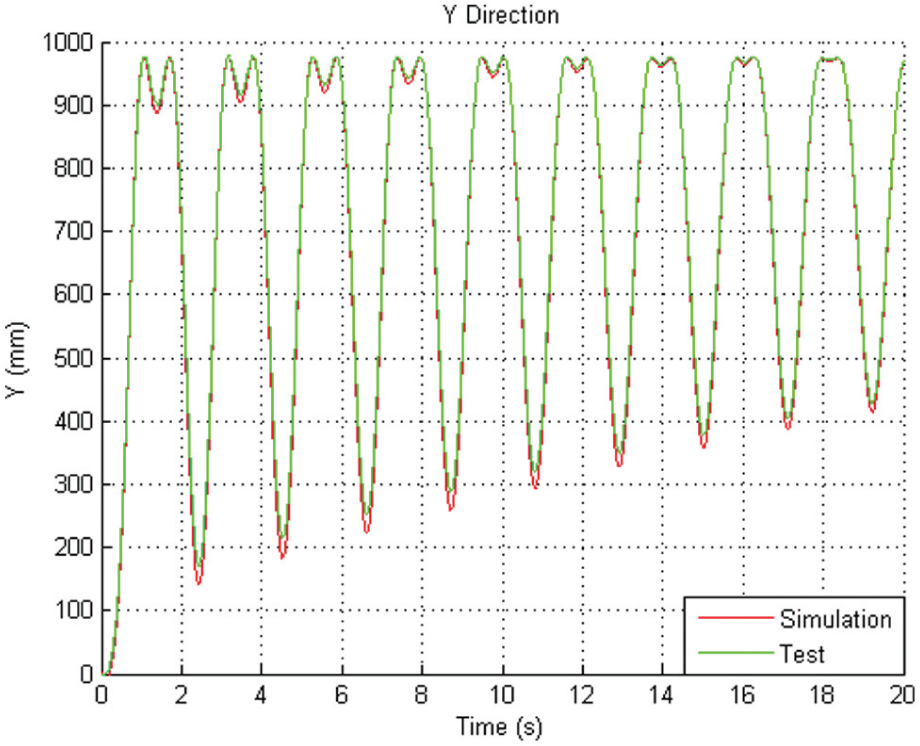
Displacement of the tip in Y direction.
The proposed nonlinear modeling method is also compared to obtained results by using the classical finite element method 5 and ANCF model. 6 Figure 8 shows the absolute error of the radius tip between nonlinear models with experiment. It is evident that the proposed nonlinear model is accurate than the other one.
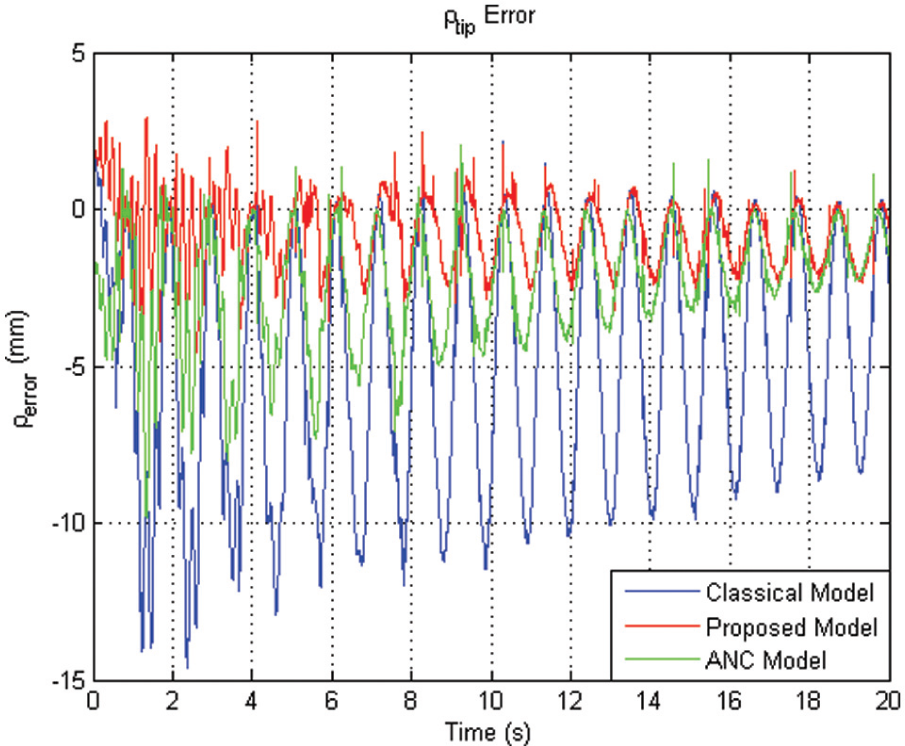
Tip radius error nonlinear models and experimental response.
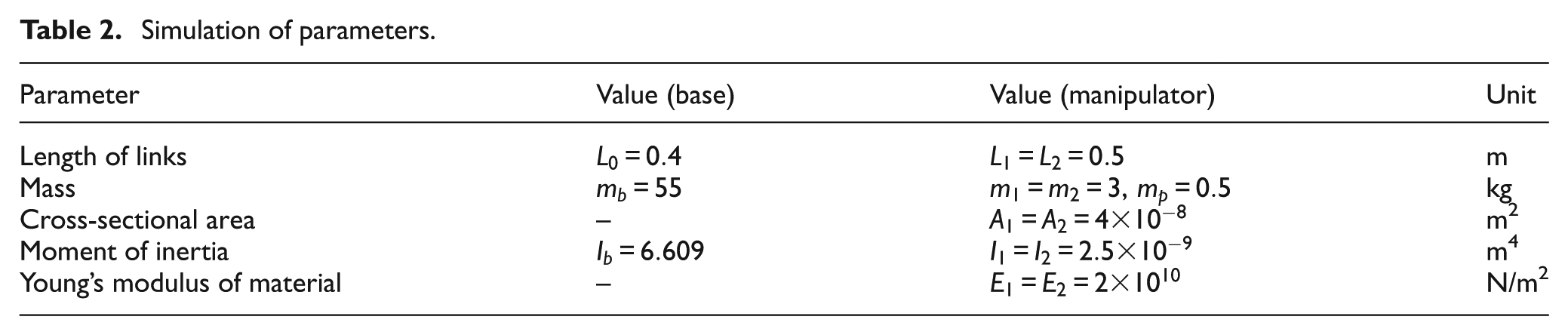
A simulation study has been carried out to investigate further the validity and effectiveness of the mobile flexible manipulators on finding the optimal path between two points with stability consideration. A two-link planar manipulator is considered which is mounted on a differentially driven mobile base at point
Simulation of parameters.
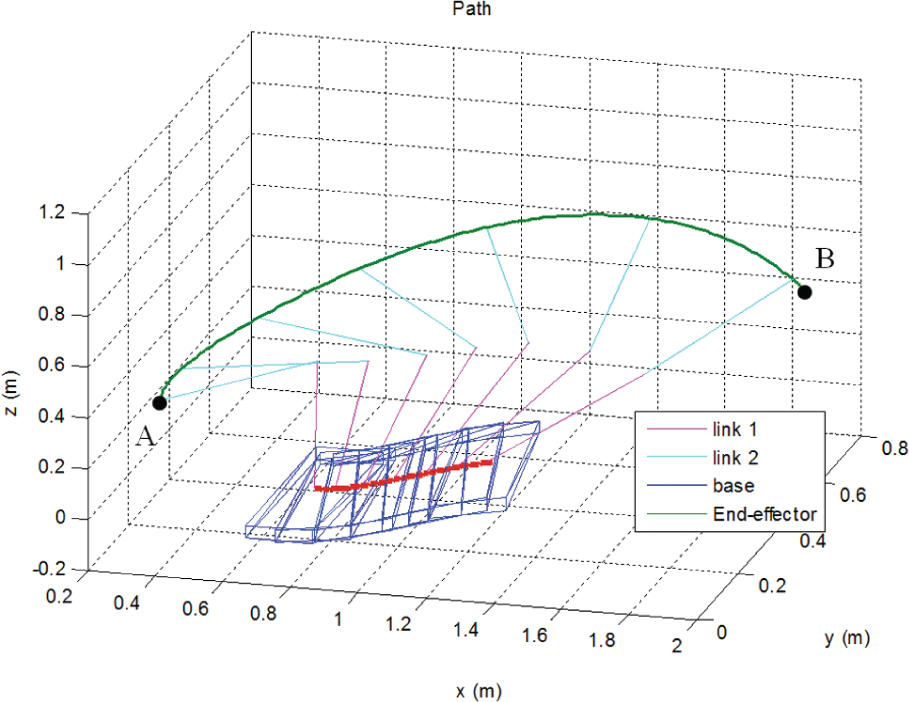
The optimal paths between two points via minimum effort and increasing stability.
A comparative study is carried out between the rigid model and flexible models (linear and nonlinear models) as shown in Figure 10. The optimal angular positions of link and wheels, corresponding to the minimum effort and increased stability, are shown in Figures 11 and 12. The simulation results presented in Figures 13 and 14 show the varying torques of the manipulator actuators. The actuator torque constraint is based on the typical torque–speed characteristics of DC motors. It can be seen that the flexibility of link will increase the oscillation of torque curves. Variation of the ZMP points during optimal path was compared to the optimal trajectory with only minimum effort in the same conditions as shown in Figure 15. As expected, the optimum trajectory with increased stability and the minimum effort is more stable than the optimal trajectory with considering just minimum effort.
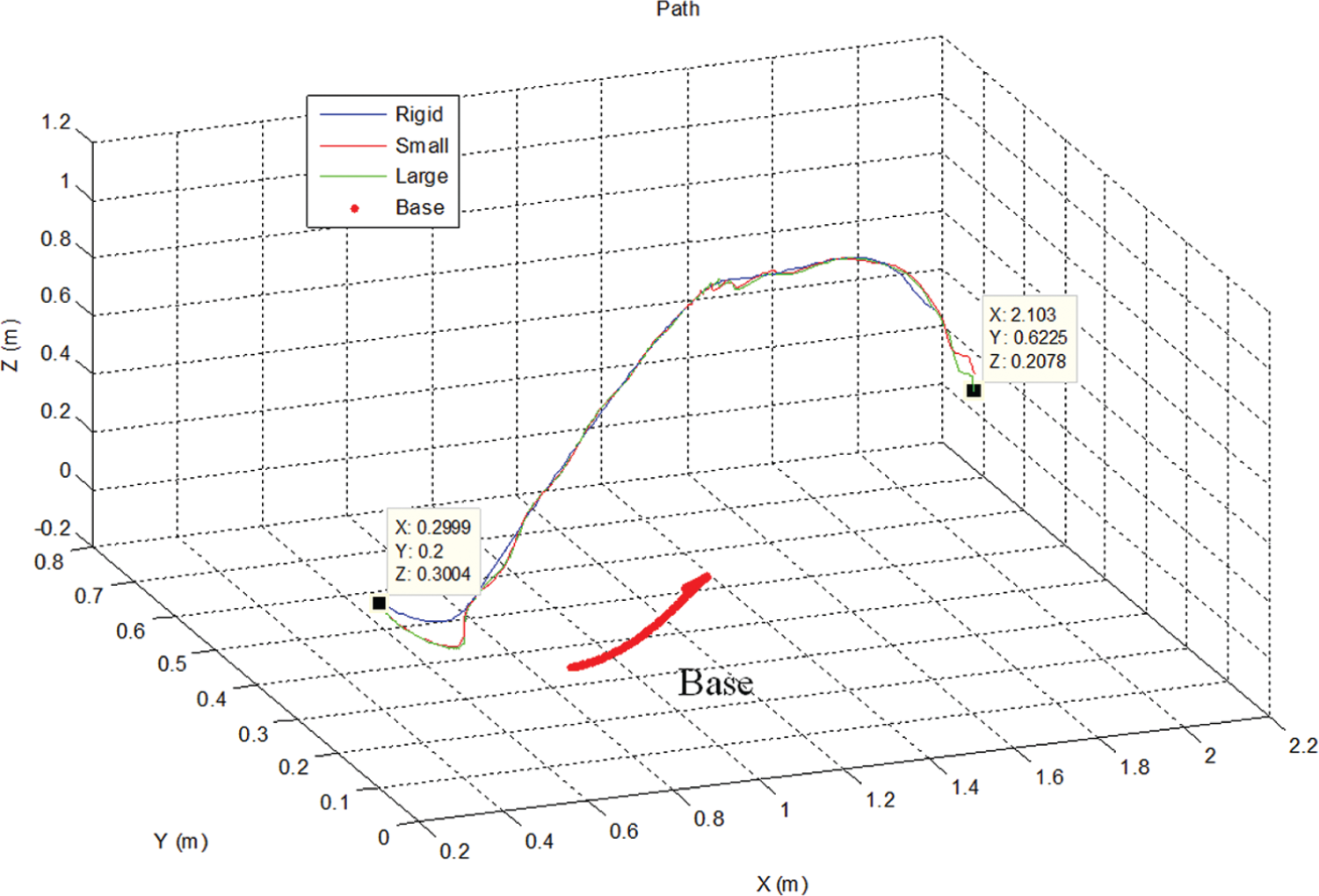
The optimal paths for different models.
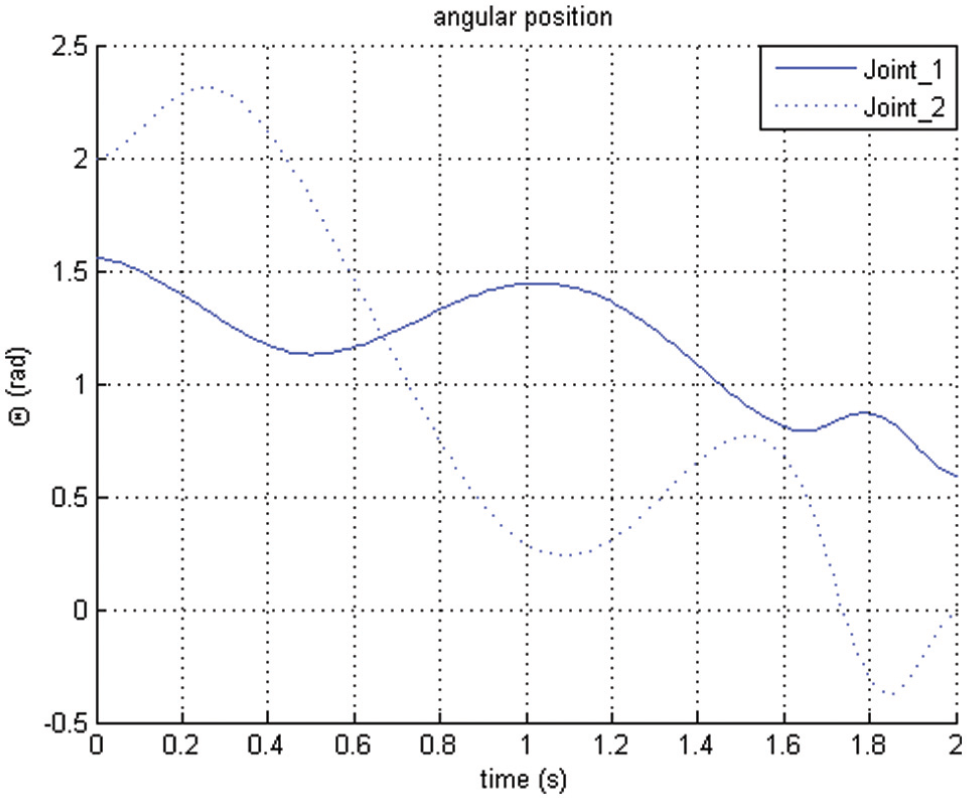
The optimal angular positions of the first and second joints.
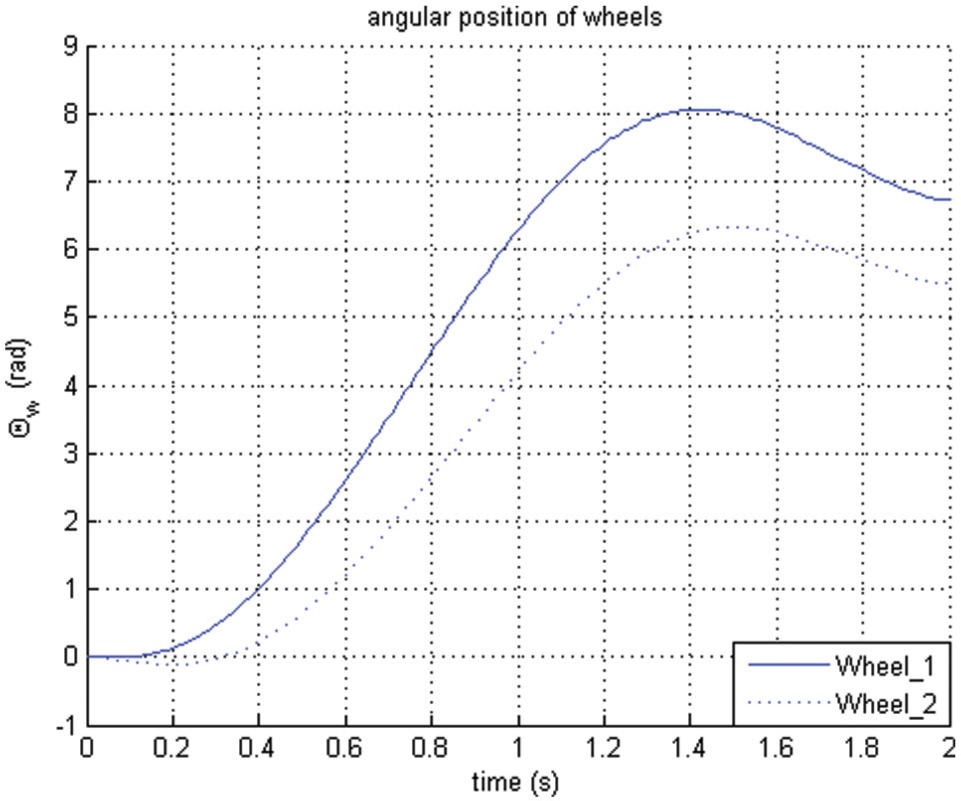
The optimal angular positions of the right and left wheels.
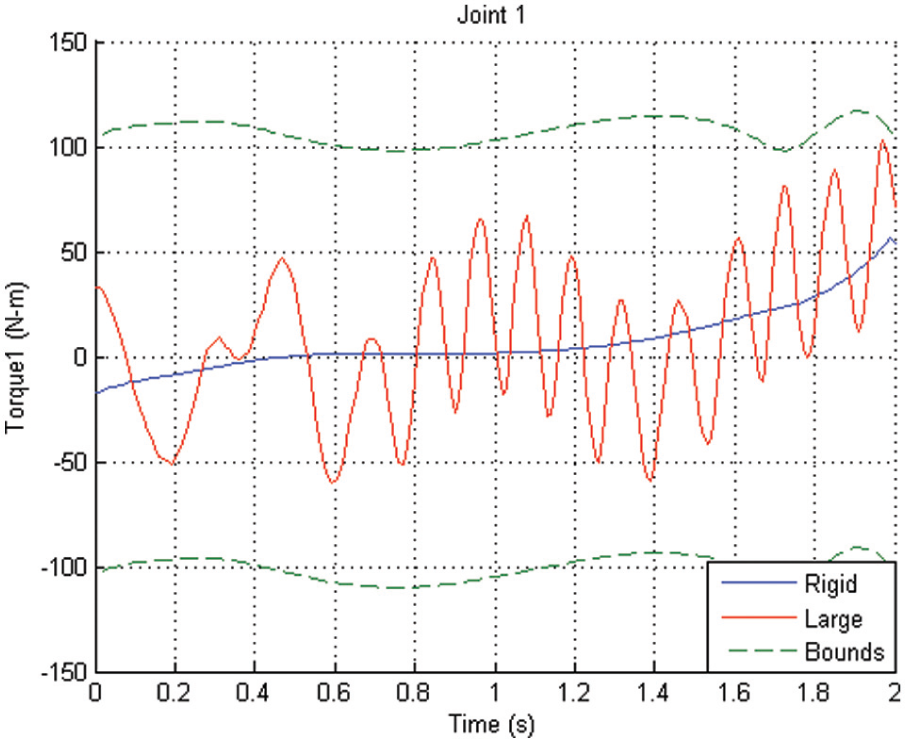
Minimum effort of the first motor within upper and lower acceptable boundaries.
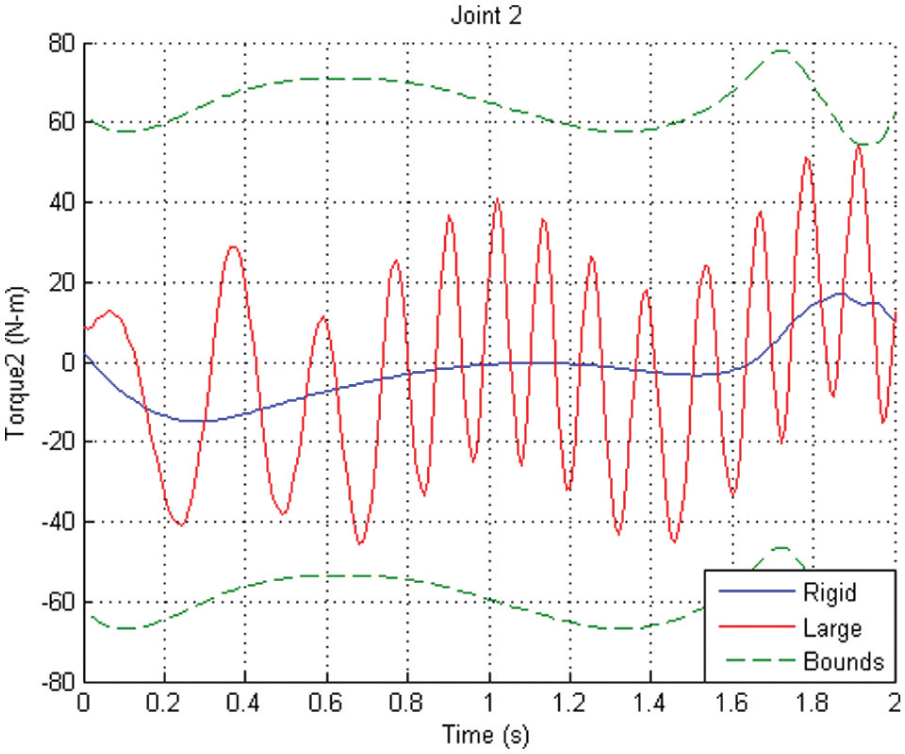
Minimum effort of the second actuator.
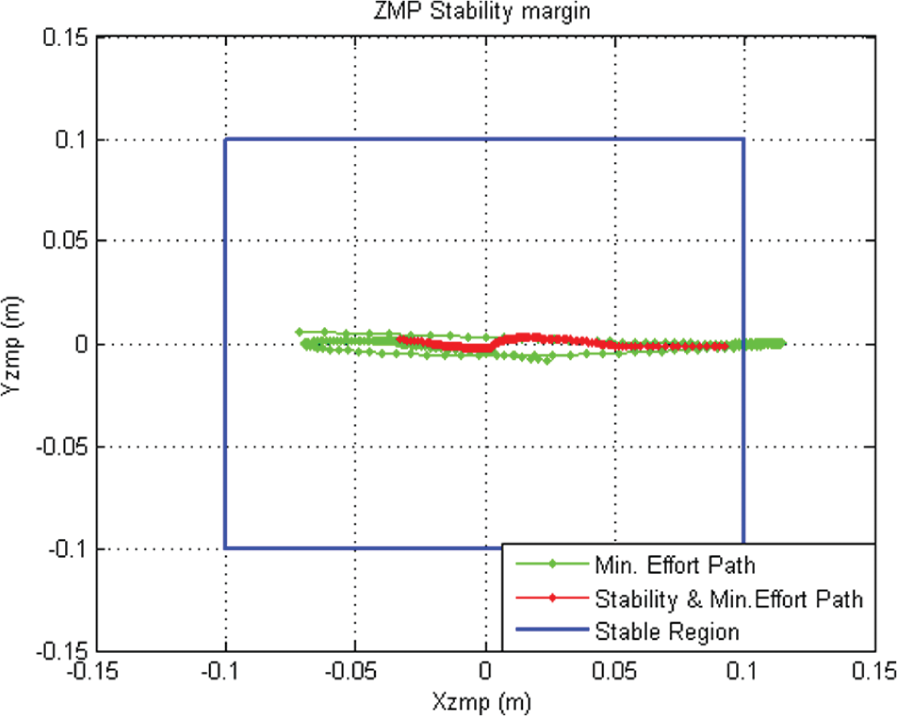
Variation of the ZMP points.
Conclusion
The main objective of this investigation is to determine the trajectory optimization to improve the stability of the mobile flexible manipulators in point-to-point maneuver. The effect of the dynamic interaction between the flexible manipulator and the mobile platform is considered to characterize the motion of a nonholonomic mobile manipulator with the compliant link capable of large deflection, in which both the geometric elastic nonlinearity and the foreshortening effects are considered. This model leads to a constant stiffness matrix and makes the formulation particularly efficient in computational terms and numerically more stable than alternative geometrically nonlinear formulations based on lower order terms. The PMP is used to obtain the optimality conditions, which leads to a standard form of a TPBVP. A new objective function based on ZMP criterion is defined to increase stability during point-to-point maneuvers. The dynamic model has been implemented and tested on a single-link very flexible arm, and in order to verify the effectiveness of the presented method, several simulation studies on a nonholonomic wheeled mobile manipulator are carried out and optimal paths with the minimum effort and increasing stability are obtained. The numerical results indicate the effect of employing trajectory optimization in the performance improvement of the mobile flexible manipulator. Moreover, in this method, designer can compromise between different objectives by considering the proper penalty matrices, and it yields to choose the proper trajectory among the various paths. The obtained results illustrate the power and efficiency of the model to overcome the high nonlinearly nature of the large deflection and optimization problem which with other methods may be very difficult or impossible.
Footnotes
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.