
Abstract
Under the stochastic production environment of uncertain job arrival, processing times and product demands, the deadlock-free scheduling is studied for a kind of knowledgeable manufacturing cell with multiple machines and products. First, the expected cost objective function is established based on continuous Markov chain with a discount factor, and a stochastic dynamic programming model is obtained by the virtual self-transfer method. Then, the properties of optimal objective function are analyzed and proved, and a heuristics approximate dynamic programming algorithm is proposed, which can effectively overcome the curse of dimensionality problem in the process of solving the dynamic programming model. With the above settled as premises, the deadlock-free scheduling strategy for knowledgeable manufacturing cell is proposed to control the processing rate and avoid system deadlock simultaneously. Finally, a case study is conducted to demonstrate and validate the effectiveness of the deadlock-free scheduling approach.
Introduction
With the rapid development of advanced management and information technologies, the manufacturing industry is booming, and various advanced manufacturing modes and new conceptions have sprung up.1–4 Most of them, capable of meeting certain demands of the manufacturing system, still have limitations of their application scope due to the multiple demands of various enterprises. Therefore, knowledgeable manufacturing, a new manufacturing idea brought forward by Yan and Liu, 5 is being given more and more attention. The technique takes an advanced manufacturing mode as advanced manufacturing knowledge, so that all kinds of complementary advanced manufacturing modes can be transformed into their corresponding advanced manufacturing knowledge in the advanced manufacturing system. On the basis of one-to-one isomorphic mapping between agent mesh and knowledgeable mesh (KM), the existing advanced manufacturing mode can be incorporated into the knowledgeable manufacturing system (KMS) to meet different demands from different enterprises. 6 The KMS, a highly intelligent manufacturing system characterized by self-adaptation, self-learning, self-evolution, self-reconfiguration, self-training and self-maintenance, can constantly adapt to environmental changes by self-learning and self-evolution. Knowledgeable manufacturing cells (KMCs), which include processing agents, transport agents, decision-scheduling modules and testing devices such as radio frequency identification (RFID) devices and raster, constitute the KMS, capable of real-time monitoring, acquiring data, processing information and making decisions. In order to realize self-adaptation, self-learning, self-evolution, self-reconfiguration and so on, KMC includes more advanced hardware and software architecture compared to the general manufacturing systems. Throughout the production process, the real-time production state data can be tracked, acquired, transferred and processed in time and accurately, including the random disturbance, state of buffers, state of machines and current operation of jobs, and rapid responses to production states are also provided for scheduling decision-making by KMC. Therefore, it is not difficult to see that compared with the general manufacturing systems, KMC is easier to realize intelligent scheduling with fewer people or no people.
In recent years, most approaches to scheduling and sequencing of jobs focus on deterministic production parameters.7–12 However, the incidents in manufacturing cells, such as the arrival rate of jobs, product demands, machine failure and repair, which usually have a stochastic and uncertain characteristic, are subject to certain random distribution. The dynamic scheduling and controlling of manufacturing system under stochastic environment are attracting more and more attention. Considering constant product demand rate and fault repair following exponential distribution, Akella and Kumar
13
studied the problem of controlling the production rate of a failure-prone manufacturing system with single machine and single product, and an optimal hedging-point production strategy was obtained. Having further studied hedging-point strategy, Kenne and Gharbi
14
pointed out that the manufacturing systems of single machine and two kinds of products, which have constant product demand rate and repair time following exponential distribution, could also obtain the optimal hedging-point production control strategy. Liefooghe et al.
15
studied a multi-objective scheduling problem in uncertain environments with uncertain processing times and proposed an indicator-based evolutionary algorithm to optimize the makespan and the total tardiness concurrently. Combined with Lagrangian relaxation and stochastic dynamic programming method, Luh et al.
16
studied the issue of minimizing expected penalty cost of part tardiness and earliness in cases of uncertain job arrival, processing times and due dates. Boukas and Liu
17
researched the single-machine and single-product machine faults and optimized the rate of processing and maintenance by means of stochastic dynamic programming. Considering the performance measure of total flow-time, a constraint-based
On the other hand, various types of jobs in actual production may share some resources in the manufacturing system. Lack of effective controlling strategy may lead to deadlock state and finally result in partial or complete collapse of KMC, which would severely lower the production efficiency of enterprises. Issues of deadlock are generally analyzed and modeled by means of Petri nets, automata and so on.23–28 Petri net and automata are two effective modeling tools for discrete-event dynamic systems (DEDS) and can be employed to analyze the dynamics of DEDS such as dynamic scheduling and deadlock. Compared to automata, Petri net is more suitable for complex systems with concurrency relations, and the system studied in this article does not have concurrency relations; automata can be used to effectively solve the problem in the study. On the other hand, this article is based on the research results of previous work 27 in which automata are adopted to obtain very good results. Therefore, automata are used for modeling tools of the system herein.
For most of scheduling problems, we do not consider the existence of deadlock, meaning deadlock and scheduling are often taken under advisement separately, which will negatively affect the performance of systems. Therefore, we should not only prevent deadlock but also develop some algorithms which can effectively improve and optimize system performance. 29 In the past decade, some researchers have addressed the deadlock-free scheduling problem. Yoon and Lee 30 introduced a resource request matrix to represent operational states and then proposed a deadlock-free scheduling approach that can perform scheduling and deadlock management in semiconductor fabrication. Abdallah et al. 31 used timed Petri nets to find the optimal or near-optimal deadlock-free schedule for the Systems of Sequential Systems with Shared Resources (S 4 R). Wu and Zhou 32 used a two-layer structure to schedule semiconductor track systems and avoided deadlock, which was modeled with a colored timed resource-oriented Petri net. Golmakani et al. 33 employed Ramadge–Wonham (R-W) theory to construct a deadlock-free search space to be utilized by A* search algorithm to obtain deadlock-free schedules. Based on a job insertion algorithm, Fahmy et al. 29 proposed a generic deadlock-free reactive scheduling approach for flexible job shops. However, little work is reported on the deadlock-free scheduling problem with stochastic job arrival, processing times and product demands.
This article focuses on the cost of work-in-process (WIP) inventory and backlog in KMC composed of multiple machines and products. The main contribution of this work is the combination of deadlock control and production scheduling under stochastic production environments with multiple machines and products, and the deadlock-free scheduling strategy (DFSS) is proposed and developed. With the help of KMC’s advanced hardware and software architecture, according to the real-time status of the system, the job type and processing speed can be automatically selected and controlled in real time on the basis of the proposed DFSS, which only contributes to the improvement of the self-adaptation capacity for KMC. Based on the finite automaton (FA) theory, a concept of cost automata (CA) is put forward and the deadlock supervisor was structured (section “KMC deadlock supervisor”). After discretization of the objective function by uniformization technique, a stochastic dynamic programming model on expected cost objective function of KMC is established, and the character of optimal objective function is analyzed. Based on all the above, a heuristics approximate dynamic programming (HADP) algorithm is developed to solve the aforementioned stochastic dynamic programming model. Consequently, an effective KMC DFSS is proposed to meet the enterprises’ needs of minimizing operating costs of KMC (section “KMC scheduling strategy”). Finally, a case study is presented to demonstrate the effectiveness of the DFSS (section “Simulation experiments and analysis”).
Problem formulation and objective function
Problem formulation
Assuming there are m manufacturing agents
In order to describe the problem clearly, a KMC is shown in Figure 1, with m = 3, n = 3, h
i = 1, h
m = 1 and h
o = 1. There are three agents
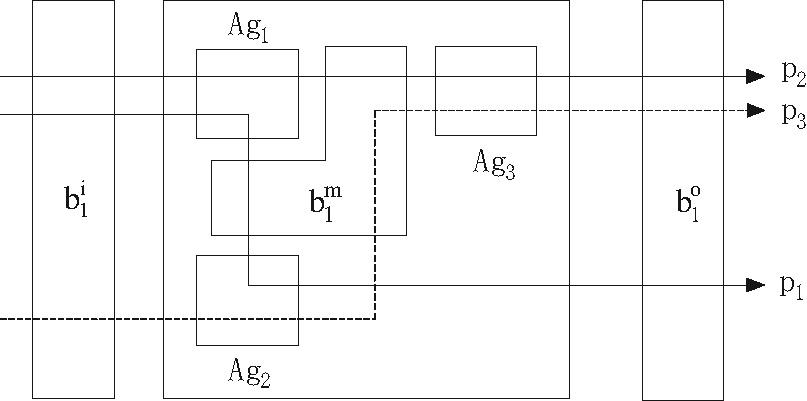
Knowledgeable manufacturing cell.
As shown in Figure 1, when
Objective function
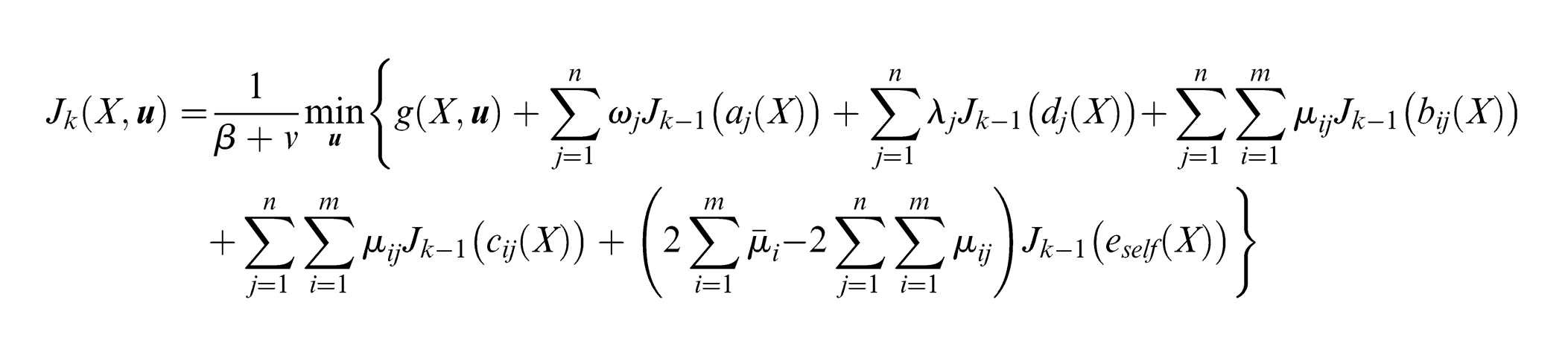
Taking into account costs of processing, inventory and backlog, the objective function can be expressed by Markov Chain Model with a discount factor in infinite horizon. The objective function of the KMC is thus defined as follows
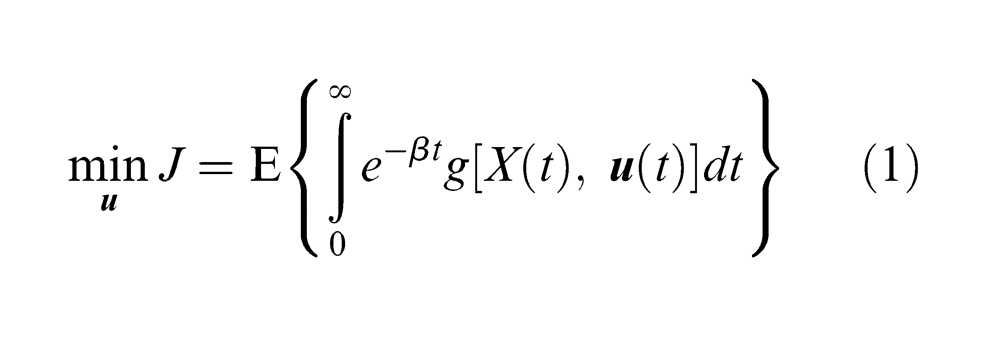
where
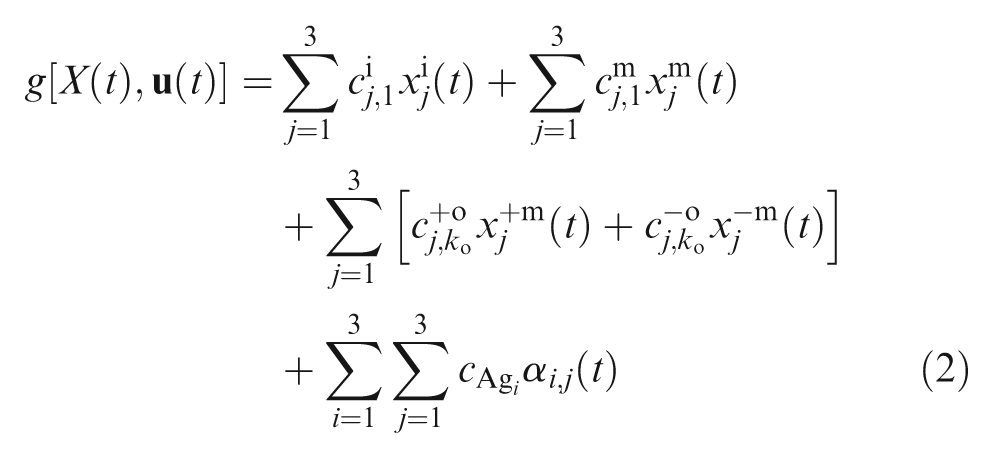
where
KMC deadlock supervisor
Let
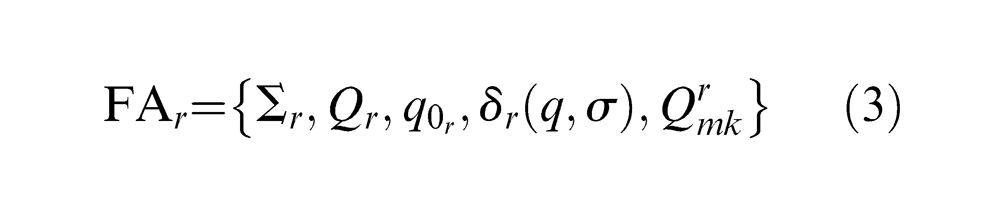
where the subscript
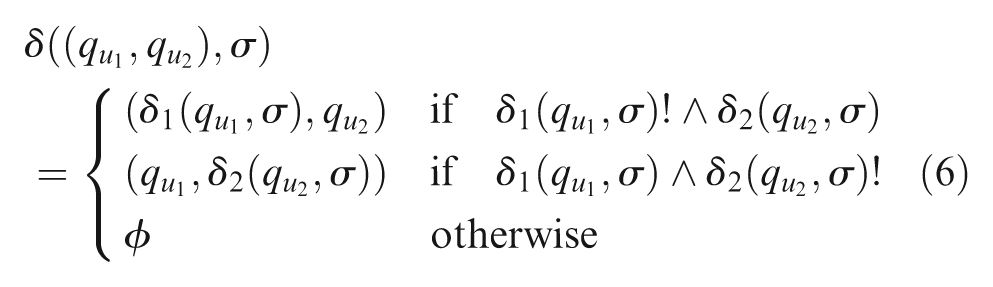
where
where
where
where
With shuffle and meet operations defined as above, logic operation can be performed on several automata to describe complicated DEDS. It is worth noting that
KMC scheduling strategy
Discretization of objective function
Manufacturing cell described by automata is essentially a DEDS, which, only at certain discrete moments, for instance, only when the agent accomplishes a working operation, will select an appropriate job in buffer to process by control strategy, that is, control is imposed at discrete time. Therefore, we should discretize the objective function to get a discrete-time Markov model.
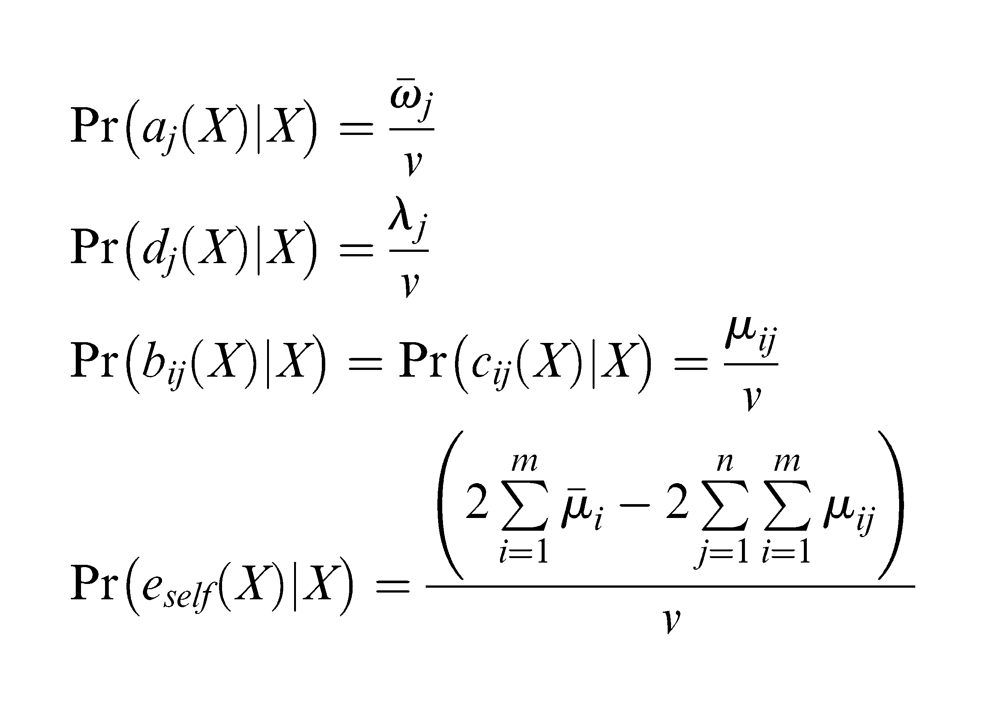
To realize the independence of time intervals of the state transfer of cells, that is, the transfer rate is independent of the state and control of system, the uniform technology is used, and the uniform occurrence probability is set as
The possible event set of system is expressed as
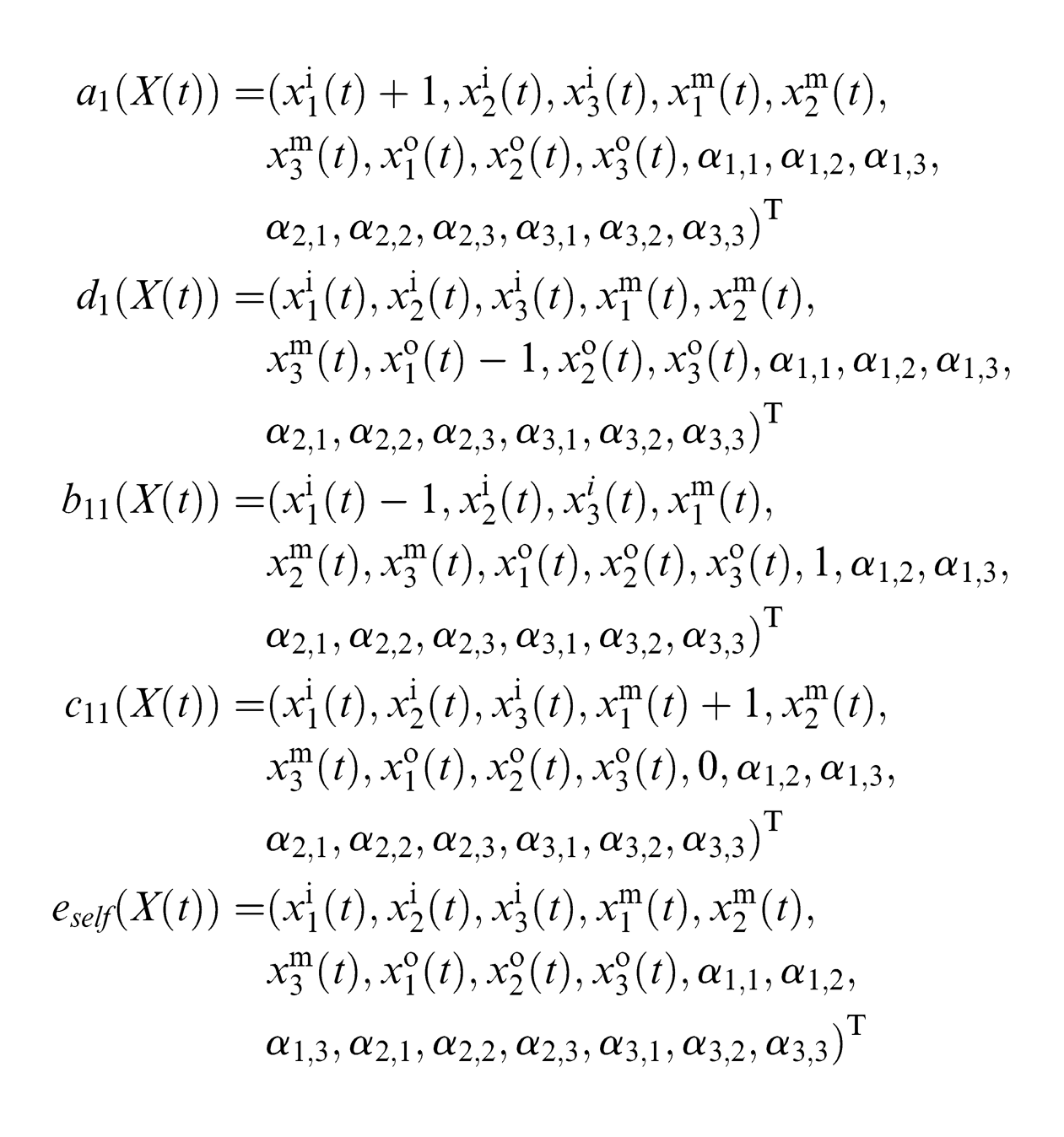
The mapping relations on the other job
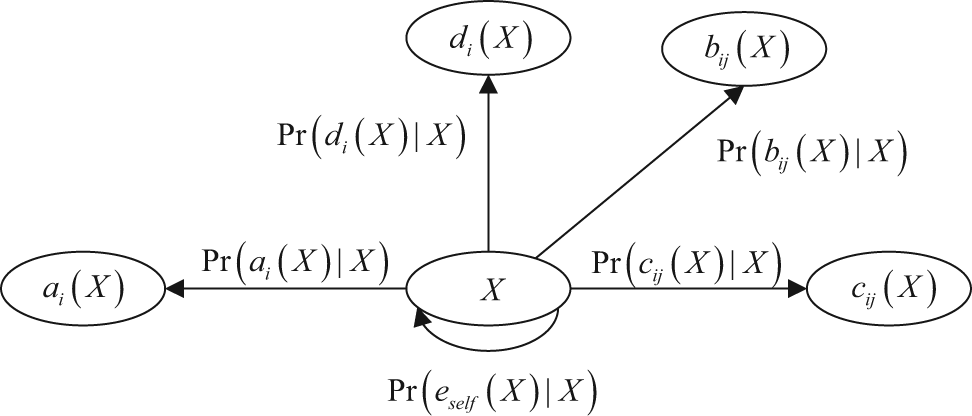
Schema of state transition of KMC.
Set
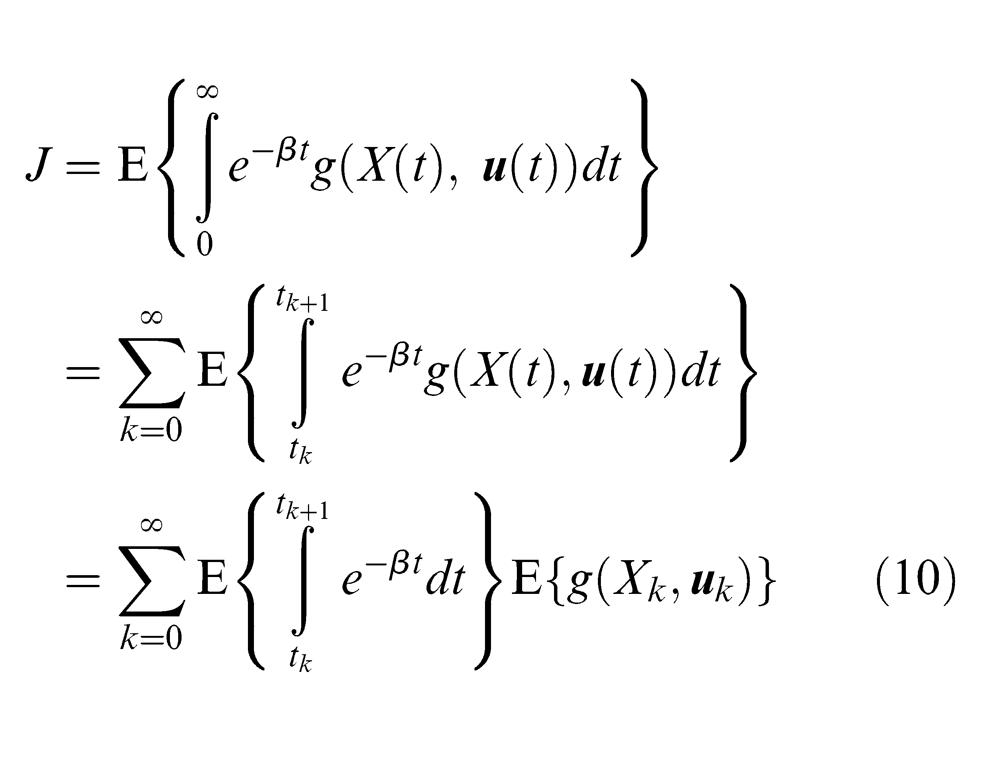
In light of the independence of time intervals of state changes, we have
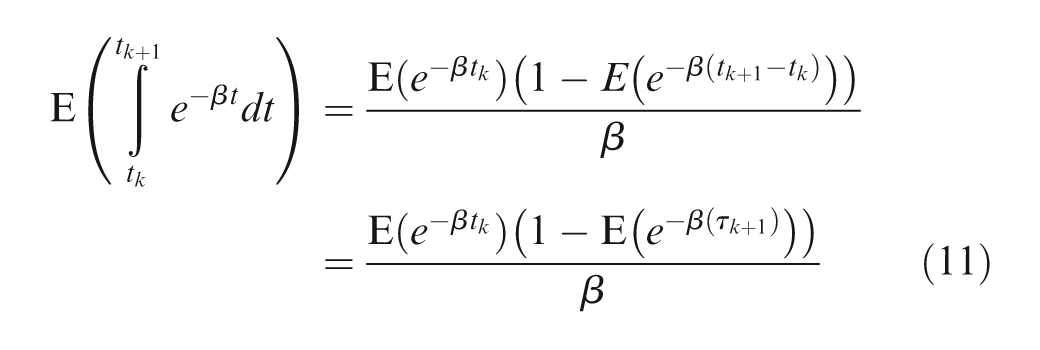
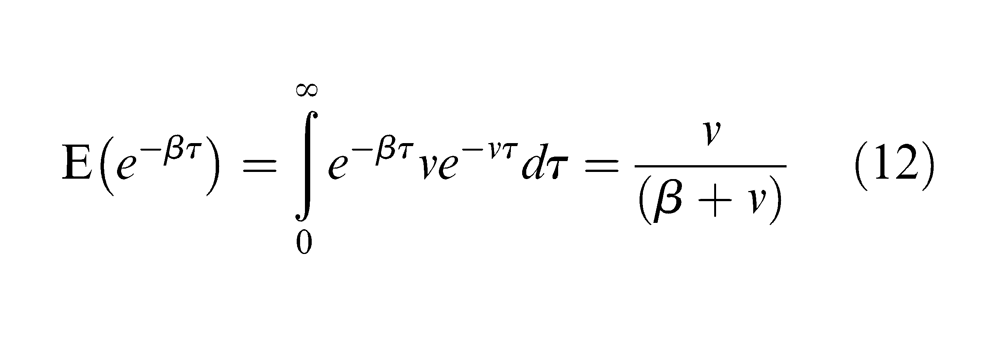
Letting
Thus, the original problem is converted to an equivalent discrete-time Markov problem in an infinite domain with the discount factor
Property analysis of objective function
Based on discrete stochastic dynamic programming,
36
the infinite horizon problem can be cut and translated into a N-phase issue. Assuming

where
Theorem 1
Let
Proof
Let
Supposing Markov process follows the optimal schedule policy, from equation (16) we get
Taking the limit on both sides of formula (17), from
so, we obtain
With Theorem 1 and formula (15), we can secure the optimal scheduling strategy of KMC.
Theorem 2
When KMC is in the state

Proof
From Bellman equation of the objective function in equation (15), we get
where
The above optimal scheduling strategy of KMC is specified as follows. When some
Definition 1
When KMC passes through the event sequence
According to Definition 1, if
Lemma 1
If the relation
Proof
By the definition of cost function, if there exists no job
Lemma 2
If the relation
Proof
Similar to the proof of Lemma 1, if there exists no job
Lemma 3
Let
Proof
Suppose
Based on the above lemmas, the properties of the optimal objective function
Theorem 3
If
Proof
For the last item in equation (18), since each machine can only process one job at one moment, we have
Or else, if
Based on equations (19) and (20), we have
The mathematical induction is adopted to prove the Theorem herein. With
By Lemma 1 and the condition of Theorem 3, the first item of right side of equation (22) is less than or equal to zero, that is
From the aforementioned mapping relation between event and state change,
The following two cases are discussed for the third item of right side of equation (22):
Case 1. If
Case 2. If
To prove that the last item of equation (22) is less than or equal to zero, the following cases are studied:
Case 1. If
If
Case 2. If
Case 3. If
Case 4. If
From equations (23) to (26), we obtain
According to the above Theorem 3, the properties of the optimal objective function
Theorem 4
If
Proof
The mathematical induction is used to prove the Theorem. For
From equations (21) and (27), we get
Since
As
The third-right item of equation (28) is discussed in the following cases.
Case 1. If
Case 2. If
Case 3. If
Now, let us make an analysis on the last item in equation (28), four cases studied below:
Case 1:
If
Case 2:
Case 3:
Case 4. If
By the above equations (29)–(32), we obtain
In proving Theorems 3 and 4, the effect of job/order arrival events on deadlock is not taken into account, as input and output buffers are unlimited so that events
Scheduling strategy of KMC
The physical structure of automata-based DFSS, as shown in Figure 3, is composed of deadlock supervisor module, KMC module and KMC scheduling decision-maker module. DFSS consists of the following major steps:
Step 1. At the running time t, if KMC is required to schedule, the deadlock supervisor and KMC scheduling decision-maker will read the state
Step 2. The KMC scheduling decision-maker sets state
Step 3. With the objective value function and the safe event set
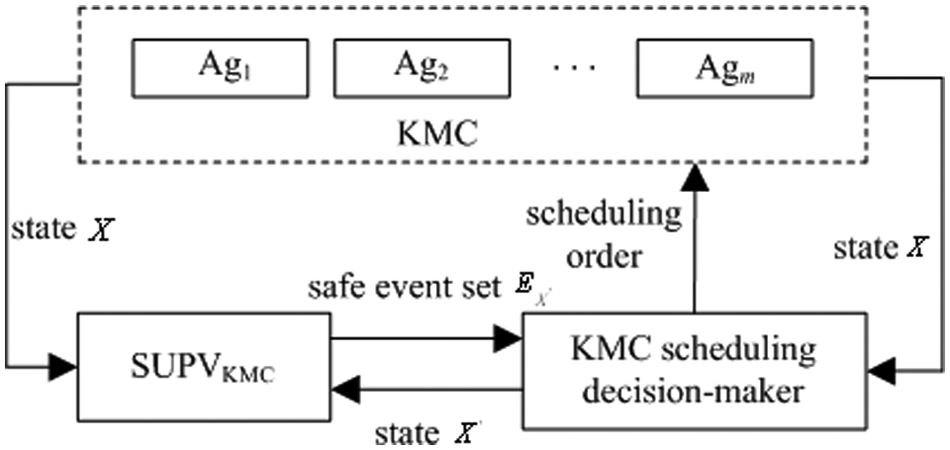
Diagram of deadlock-free scheduling strategy.
It is worth noting that the DFSS can be implemented automatically in real-world KMC. During the manufacturing process, KMC real-time state data can be acquired by RFID device, and the deadlock supervisor software and scheduling decision-maker one are embedded in the host computer. A programmable logic controller is used to collect real-time data from the RFID devices and to transfer data to a host computer via Transmission Control Protocol (TCP)/Internet Protocol (IP) network or industrial field bus, which are stored in a database and employed by deadlock supervisor and scheduling decision-maker.
In the above DFSS steps, the choice of algorithm to solve dynamic programming equation is critical. As we all know, dynamic programming in practical applications is often confronted with “curse of dimensionality,” which is usually triggered by state space, output space or action space, exerting a strong negative impact on the dynamic programming applied to practical engineering. Traditional algorithms, such as Over-Relaxation, pre-Jacobi iteration, Gauss–Seidel method and policy iteration algorithm, all require to traverse all the system states, which gives rise to heavy burden of calculation and storage. However, the approximate dynamic programming (ADP) algorithm can be used to overcome the “curse of dimensionality.” As ADP algorithm mainly employs simulation and function approximation to eliminate or minimize the impact of “curse of dimensionality,” it is good at solving problems of large scale, in the absence of standard model or state-transfer function. Therefore, in recent years, the ADP algorithm has attracted more and more concern from scholars and has been successfully applied in the field of production control and operation management.37,38 Combined with the aforementioned properties of optimal objective function, a HADP algorithm was proposed in this article; the detailed steps of the algorithm are described as follows:
Step 1. Initialize all
Step 2. If the state of stage
Step 3. If
Step 4. Calculate and get the jobs, which satisfy
Step 5. If
Step 6. Apply the
Step 7. Judge whether
Step 8. If
Step 9. Update the objective value function using the following equation
Set
Step 10. Determine the next state
For the job set
Simulation experiments and analysis
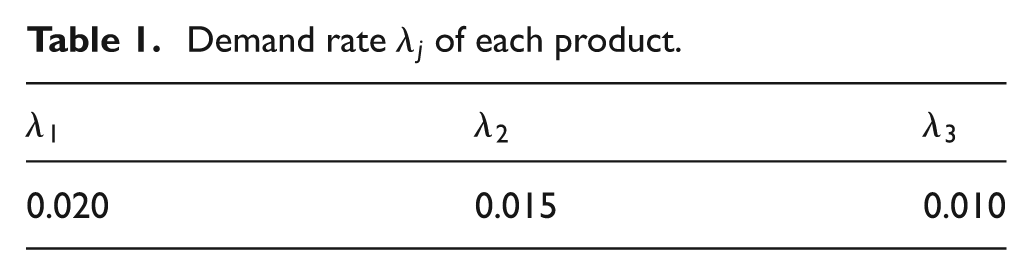
As mentioned before, the KMC is composed of three agents with three types of jobs
Demand rate
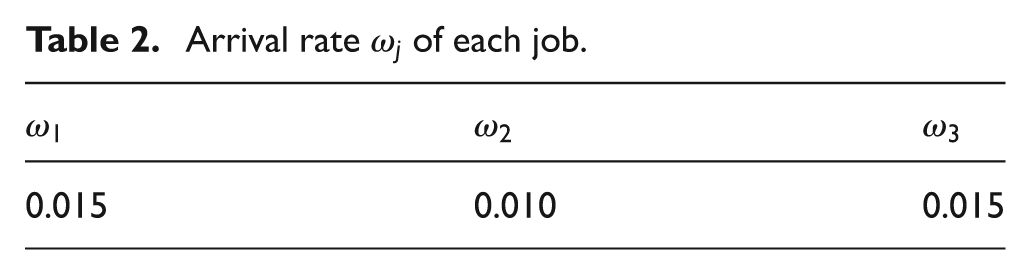
Arrival rate
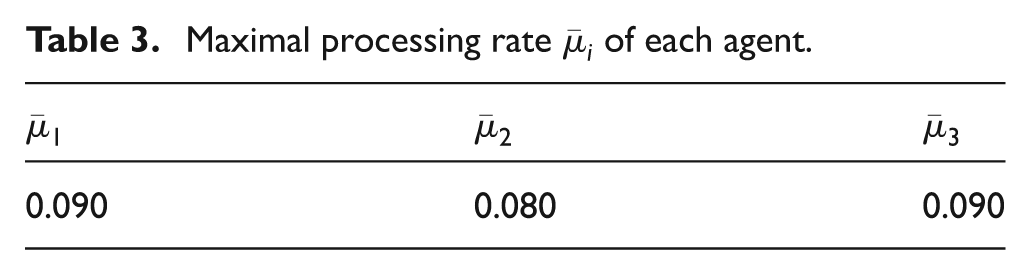
Maximal processing rate
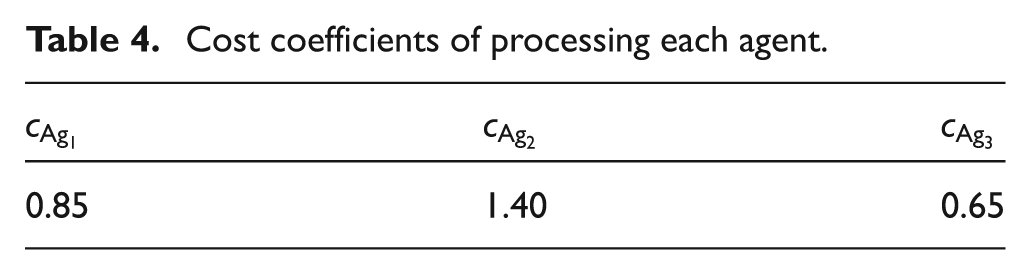
Cost coefficients of processing each agent.
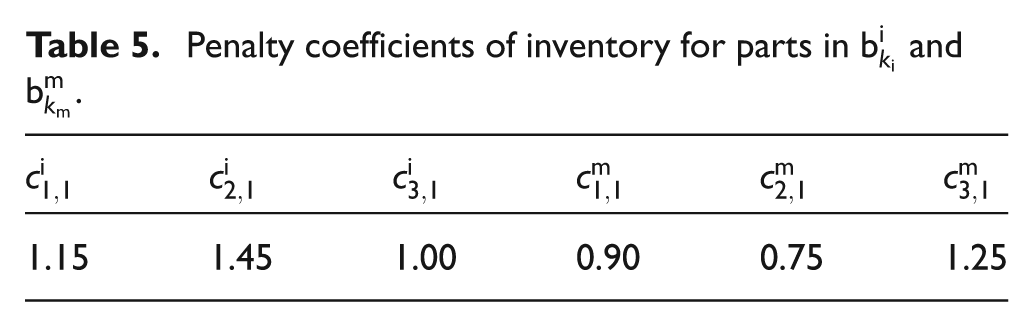
Penalty coefficients of inventory for parts in
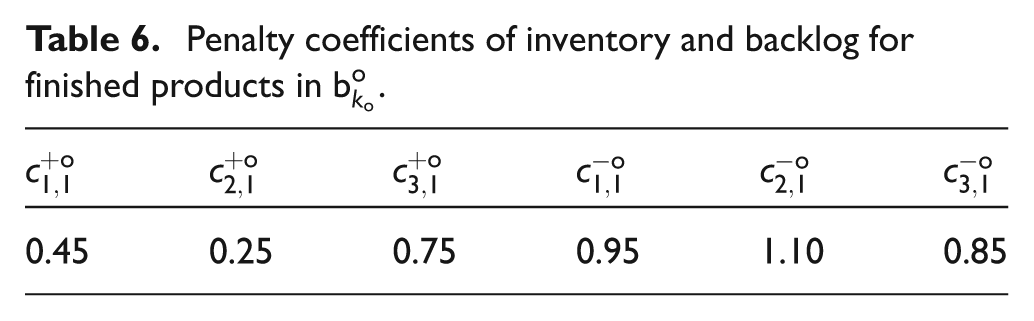
Penalty coefficients of inventory and backlog for finished products in
Set the initial state
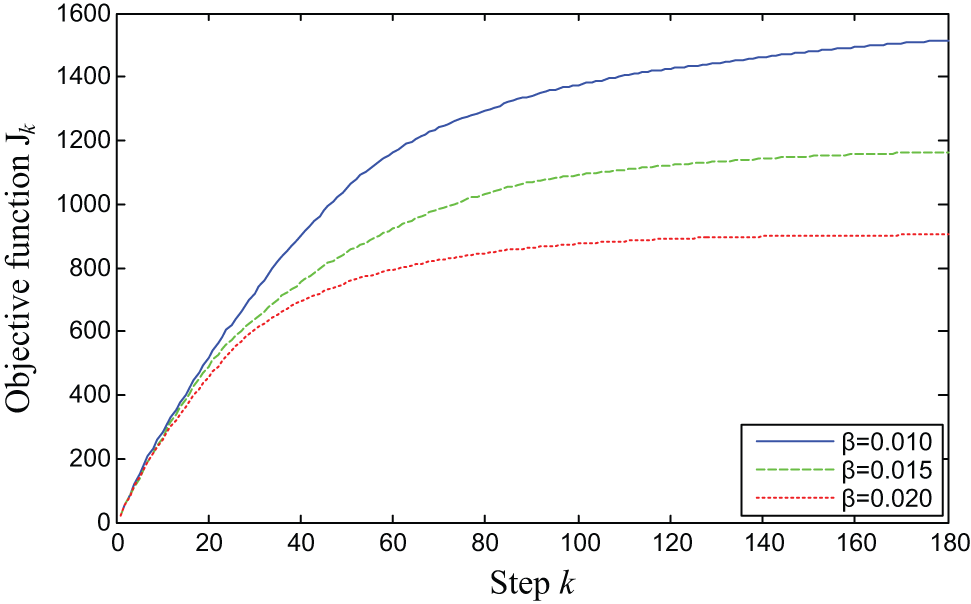
Objective function value of initial state
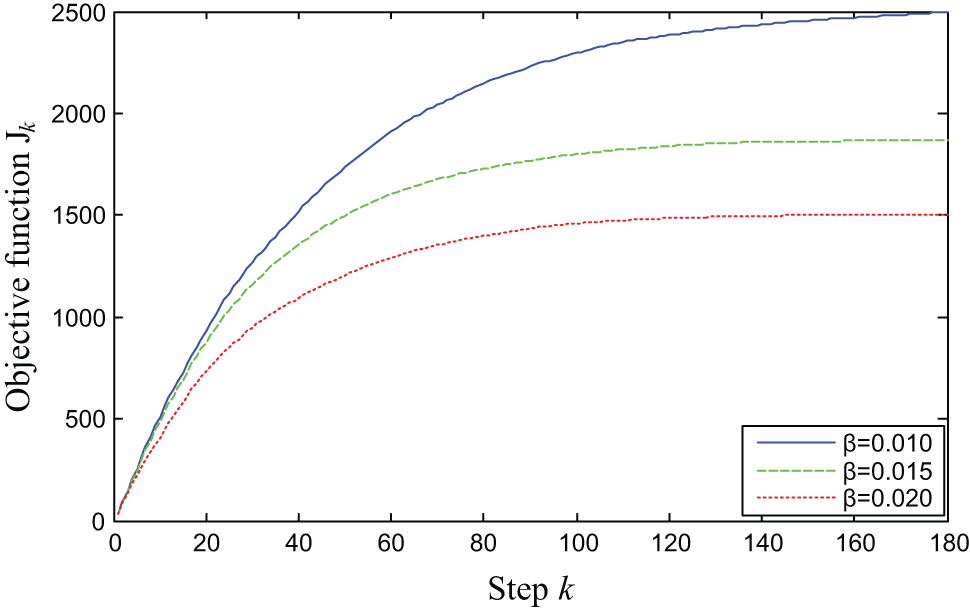
Objective function value of initial state
Objective function values of the two control strategies.
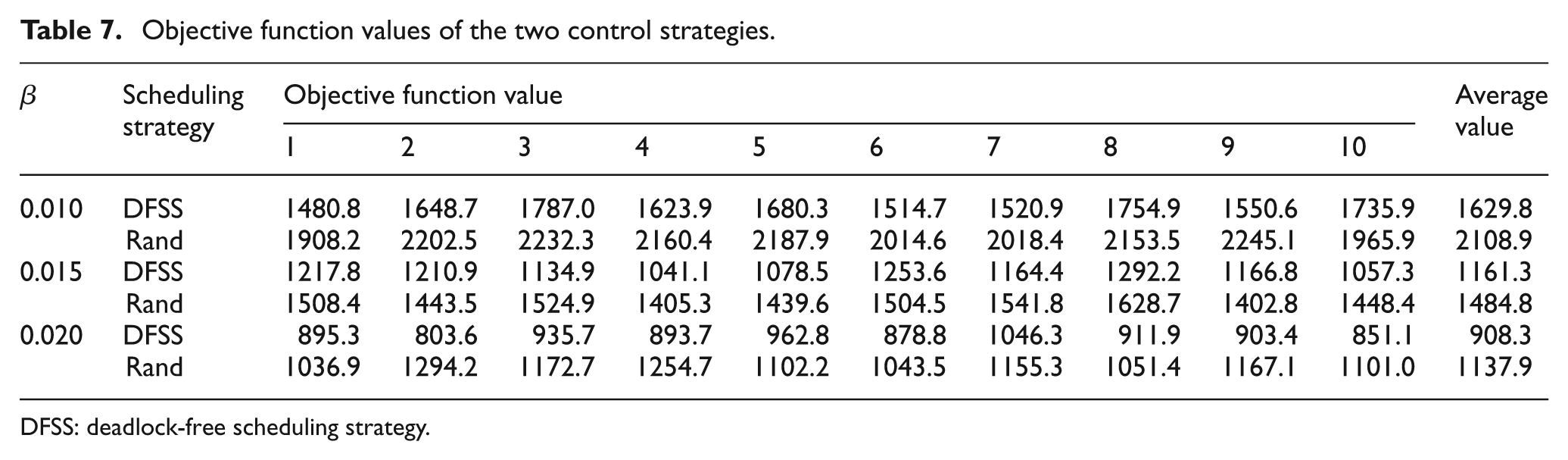
DFSS: deadlock-free scheduling strategy.
Conclusion
As there are few researches on the integration of deadlock control and production scheduling under stochastic manufacturing environments, in this article, the deadlock-free scheduling problem of KMC composed of multiple machines and products with limited buffers has been studied under the production environment with uncertain job arrival, processing times and product demands. A stochastic dynamic programming model on the expected cost objective function of KMC was established. The properties of optimal value function of the model were obtained by analysis and proof, which has a certain degree of universality. To overcome the curse of dimensionality arising from the combination of discrete state space, a HADP algorithm was proposed to solve the model via simulation and function approximation.
Based on the proposed HADP algorithm, the DFSS for KMC was obtained. The interactions between the automata deadlock supervisor and scheduling decision-maker realized the real-time selection of jobs in buffers and processing rate control, which did help to avoid deadlock state and optimize the performance of KMC simultaneously, thus ensuring its smooth running. And the validity and feasibility of the DFSS were verified by the case study presented in this article.
It should be noted that our study is based on the assumption that the processing time of workpieces follows negative exponential distribution. However, in actual production, the processing time of some types of jobs is sometimes subject to normal distribution. This presents an interesting direction for future research.
Footnotes
Appendix 1
Acknowledgements
We thank the two reviewers and Professor Li Lu for their valuable comments and suggestions.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by the National Natural Science Foundation of China under Grants 60934008, 50875046 and 51005160 and by the High School Natural Science Foundation of Jiangsu Province under Grant 13KJB460005.