
Abstract
This article presents a robust design method for the path-generating linkage, which can run orderly through desired points. The proposed method excels in accurately considering the influence of more stochastic noises, including dimensional errors, assembling errors, pair clearances, friction coefficients, velocity of drivers, external loads and so on since the multi-rigid-body system dynamics theory and the joint clearance contact theory are combined for building the mechanism model. And a fast algorithm is integrated for estimating the probabilistic output displacement error of the linkage mechanism. The previous work only considered the partial influence of dimensional errors, assembling errors and pair clearances, especially the method for dealing with the influence of the pair clearances is too simple. Hence, the proposed method in this article is more applicable to engineering practice. Finally, a four-bar path-generating linkage is selected for numerical illustrations.
Keywords
Introduction
Generally, the mechanism performance is inevitably influenced by a number of stochastic noises, such as dimensional errors, assembling errors, pair clearances, friction coefficients, velocity of drivers and external loads. 1 Hence, in the design stage, proper methods should be resorted to take the above influential factors into account. Robust design method introduced by Taguchi et al. 2 and Rout and Mittal 3 is such a promising method that it has been getting increased attention by researchers. The objective of robust design method is to optimize the mean performance and minimize the performance variation due to uncertainties. When it is applied to the path-generating linkage, two tasks follow. The first is to make sure the linkage runs orderly according to the desired generating path for accomplishing the desired function, that is, R3 should be close to R0 in Figure 1. Then the optimal deterministic design variables for configuring the linkage, such as the linkage lengths and assembling positions, should be found by optimization techniques.
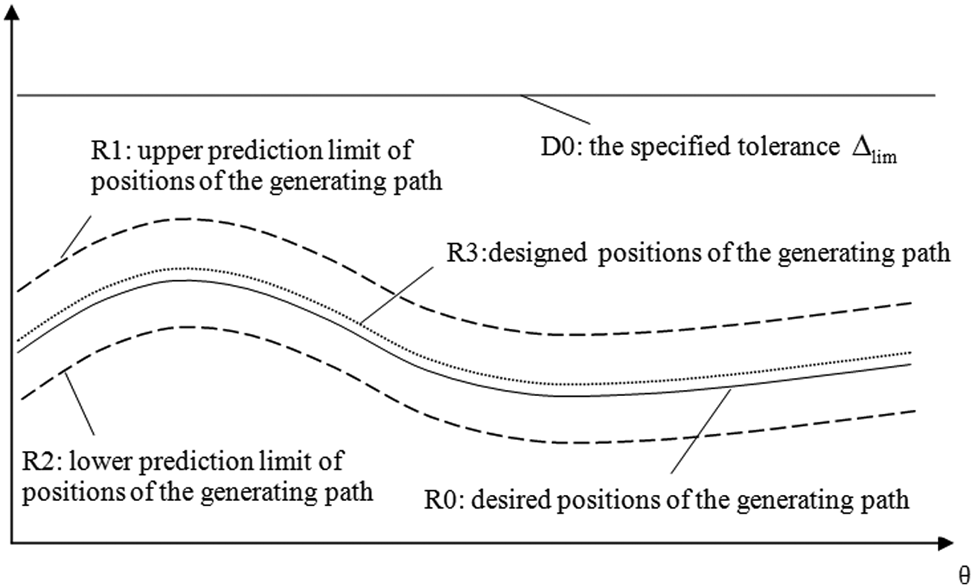
The distribution of positions of the generating path.
The second is to minimize the probabilistic deviation of the generating path, that is, the deviations of R1 and R2 from R3 should be as small as possible due to the influence of the above-mentioned stochastic noises. In this way, the generating path of the linkage is not sensitive to the above noises given the above deterministic configurations.
In the past studies on robust design of mechanisms, researchers have done a lot of work. Using the Taguchi method, Kota and Chiou 4 presented a new optimization approach for robust synthesis of mechanisms under the influence of uncertain factors in early 1990s. Lio 5 applied the concept of robustness in the design of linkages, that is, linkages with minimum sensitivity to variations in dimensions, in which it used the equations of closure of linkage kinematic chains to build the mechanisms model and further considered the influence of dimensional noises. During the robust synthesis of mechanisms, Shi et al. 6 first used the homogeneous transformation matrix to build the mechanisms and then incorporated the clearances in the effective links and further considered dimensional errors and assembling errors in mechanism. Du and colleagues7,8 used a simple analytical method to build the model of the typical linkages and developed methods for robustness synthesis of function generating mechanisms, in which dimension variables and clearance variables are treated as truncated random variables and interval variables, respectively. Huang and Zhang 9 presented an improved Taguchi method to determine the optimal tolerances for individual components so that the total assembling cost is minimized while satisfying the accuracy requirements of the mechanism.
As can be seen from the above literature, partial noises (e.g. dimensional errors, assembling errors, pair clearances) are considered in robust design since the method of building up the linkage mechanism model is too simple. In fact, as mentioned above, there are other noises, including friction coefficients, velocities of drivers, external loads and so on, influencing the linkage mechanisms. Meanwhile, the method for considering the influence of the pair clearances in the linkage mechanisms is usually ignored or simply treated as dimensional errors. The effects of them on the accuracy of mechanisms, to the best of the authors’ knowledge, have not yet been explicitly addressed in previous mechanism robust design. Hence, in order to make the robust design more applicable to the actual engineering problems, the article uses the multi-rigid-body system dynamics model (MRBSDM) and joint clearance contact model (JCCM) to depict the mechanism model for accurately considering the influence of more types of noises.
In this article, a robust design method of path-generating linkage considering the above noises is proposed. In section “Building of mechanism model,” the method for building up the linkage mechanism model is presented followed by a robust design method of the path-generating linkage presented in section “Robust design of path-generating linkage.” Then section “A fast algorithm to estimate the probabilistic output displacement error of the linkage mechanism” proposes a fast algorithm to estimate the probabilistic output displacement of the linkage mechanism which can be integrated in robust design of path-generating linkage. Finally, one typical example is given in section “Numerical example” and section “Conclusion” is the closure of the article.
Building of mechanism model
In this section, the article resorts to the MRBSDM and JCCM to simulate the real running state of the linkage mechanism, which can take both kinematics and dynamics into consideration. Based on this model, as many as related influential noises can be parameterized and the kinematic and dynamic influence of clearances is also considered.
Building of MRBSDM
As for multi-rigid-body systems, the unified dynamic equation is as follows
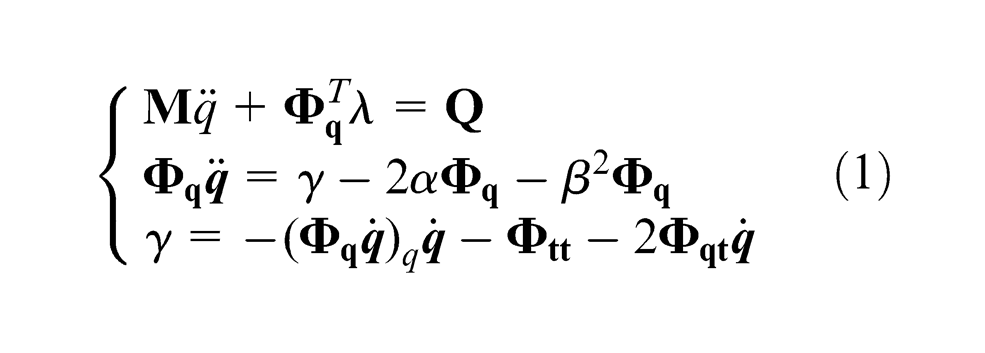
where
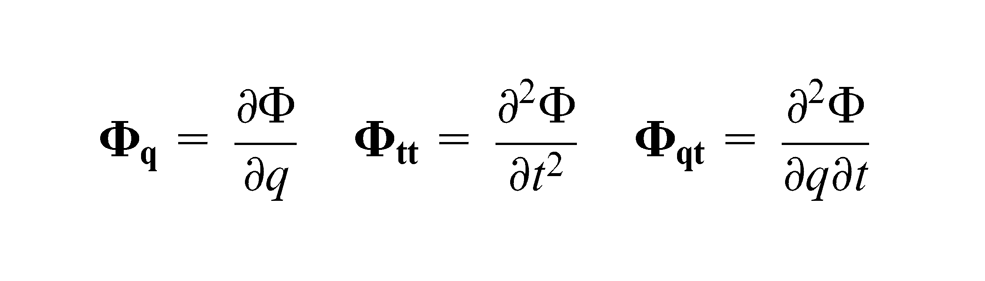
where
According to the theory above, the mechanism model can be conveniently set up, which helps study as many influential stochastic noises as possible. More details of this methodology can be seen in Flores and Ambrosio. 10
JCCM
There inevitably exits clearance in revolute joints, which generates separation and impact between motion parts. It influences both the kinematic and dynamic outputs of mechanism. In the work of Flores and Ambrosio, 10 the authors presented a good computational methodology for dynamic analysis of multi-body mechanical systems with planar joint clearance, based on a thorough geometric description of contact conditions and on a continuous contact force model.
Resorting to this methodology and aiming at each joint, two planar circles (denoted by pin circle and bushing circle) are used to represent the pin and bushing, which are, respectively, attached to rigid body i and j, as shown by Figure 2. Then the contact model of the two planar circles is built to simulate the real contact state of joint clearance. The next is the procedure for constructing contact model, which closely follows the work of Flores and Ambrosio. 10
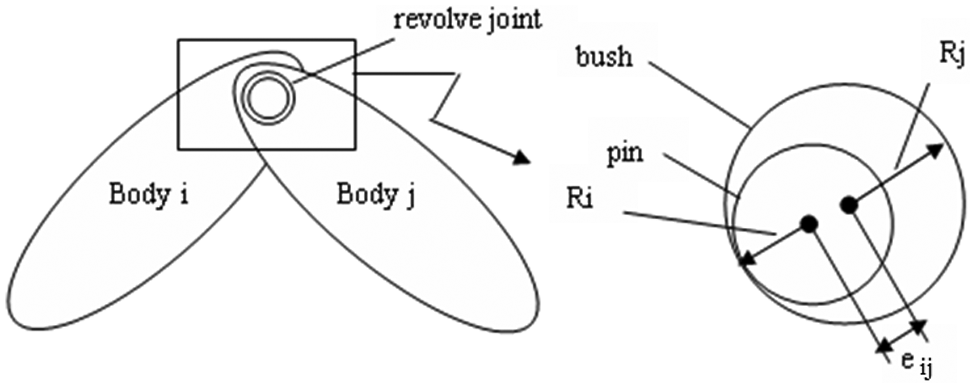
Planar revolute joint with clearance between body i and body j.
In Flores and Ambrosio, 10 it displaced several kinds of the impact force models. By comparison, the impact force model proposed by Lankarani and Nikravesh is more reasonable since it is the only model that accounts for the energy dissipation during the impact process. The formula of this impact force model is as follows
where
where
Furthermore, owing to the simplicity and easiness of this impact force model to implement in a computational program, the article will use it in JCCM. To get more information about the establishment of kinematic aspects of JCCM, please see section “Robust design of path-generating linkage” in Flores and Ambrosio. 10
When the JCCM is integrated in the MRBSDM model, as many influential stochastic noises as possible can be included to study the probabilistic output deviation of the linkage mechanism.
Robust design of path-generating linkage
As for the design of path-generating linkages, the actual designed position of a coupler point
Then the estimated error as the standard for the path-generating linkages can be defined as
The conventional optimal design method assumes all the considered influential variables to be deterministic. Correspondingly, the uncertain influence of stochastic noises cannot be considered. Hence, the format of the optimal design model for path-generating linkage is as follows
where
The optimal design model above is too simple to be applicable to the actual engineering problems. While the robust design method is more suitable. The next will present the robust design method of path-generating linkage.
As mentioned above, the stochastic noises
The object of robust design is to find the optimal
where
On the other hand, it is common that there are some restrictions in geometry or/and performance to guarantee the optimum design solution to be feasible. Restrictions in geometry or/and performance are assumed to be represented by
where
where
Usually, there is a specified tolerance
As shown in Figure 3, the article supposes the probability distribution of the error
The probability distribution of the error
A fast algorithm to estimate the probabilistic output displacement error of the linkage mechanism
Given the deterministic configurations
where
Since
The general procedure of this method is shown in Figure 4.
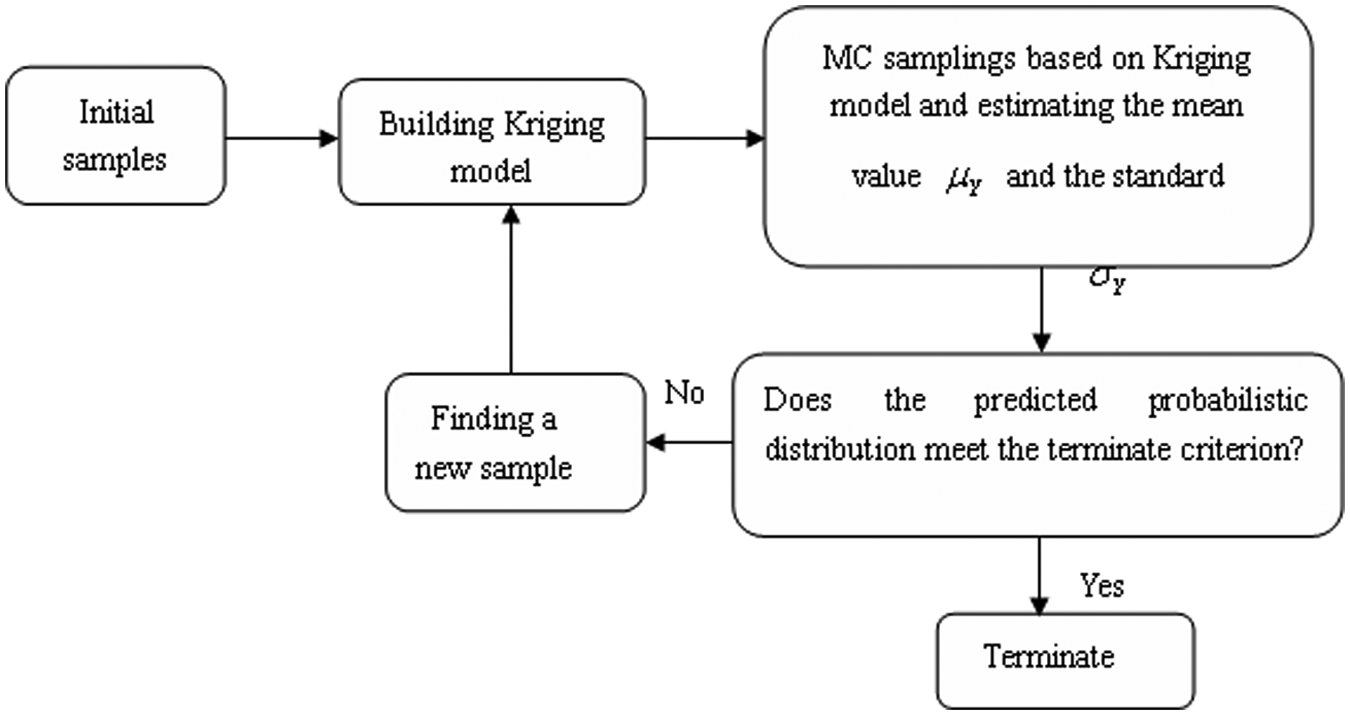
Algorithm flowchart.
Initial samples
For the first step, initial samples generated by the Monte Carlo sampling (MCS) method or the Latin hypercube sampling (LHS) methods are reasonable. In order to effectively explore the information of the design space while balancing the accuracy and efficients, the LHS methods are used, whose samples are evenly distributed in the design space. 11
Building Kriging model
For the second step, the Kriging model built by the N initial point set
where
where
Generally, there are several forms for the correlation function. In this article, the common squared exponential function is used
where
Then the expected value
where
A new strategy to find new samplings
As shown in section 3.1, the Kriging model has the advantage that can provide not only a prediction at an unknown point but also an estimate of the prediction variance. The larger the number of the samples is, the smaller the prediction variance is. Generally, the difference between the initial Kriging model and the mechanism model cannot satisfy the specified tolerance and new samples should be added to train the Kriging model. In order to reduce the computation, the article here presents a new efficient strategy to find the least number of samples for training the Kriging model. The thought of the strategy is to make maximum exploration of the information provided by the existing samples and use the corresponding information to find the new samples that help train the Kriging model to be closer to the mechanism model as much as possible. Then maximizing equation (17) or (18) to obtain the optimal solution being the new sampling locations
where
In equation (18), the maximum value of
In order to combine the advantages of both equations (17) and (18), the new criteria for finding the new sample are shown as follows
Termination criteria
In this article, the optimal problem in equation (7) needs to find the mean
Equation (20) means that further iteration will not improve the Kriging model to predict the mean and the variance. Generally speaking, one should select the convergence value, that is,
Numerical example
A four-bar mechanism as shown in Figure 5 is to be designed so that point P should follow orderly according to the desired path specified in Table 1. It should be noted that the input angle
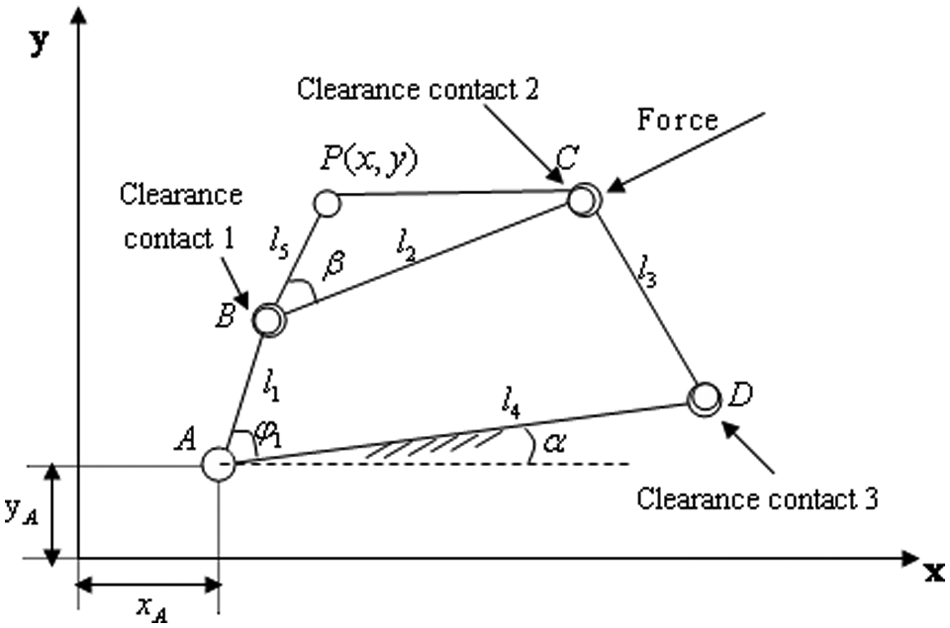
The four-bar linkage.
The desired points of the path-generating linkage.

In this mechanism, the deterministic design variables
The variation range of the deterministic design variables.

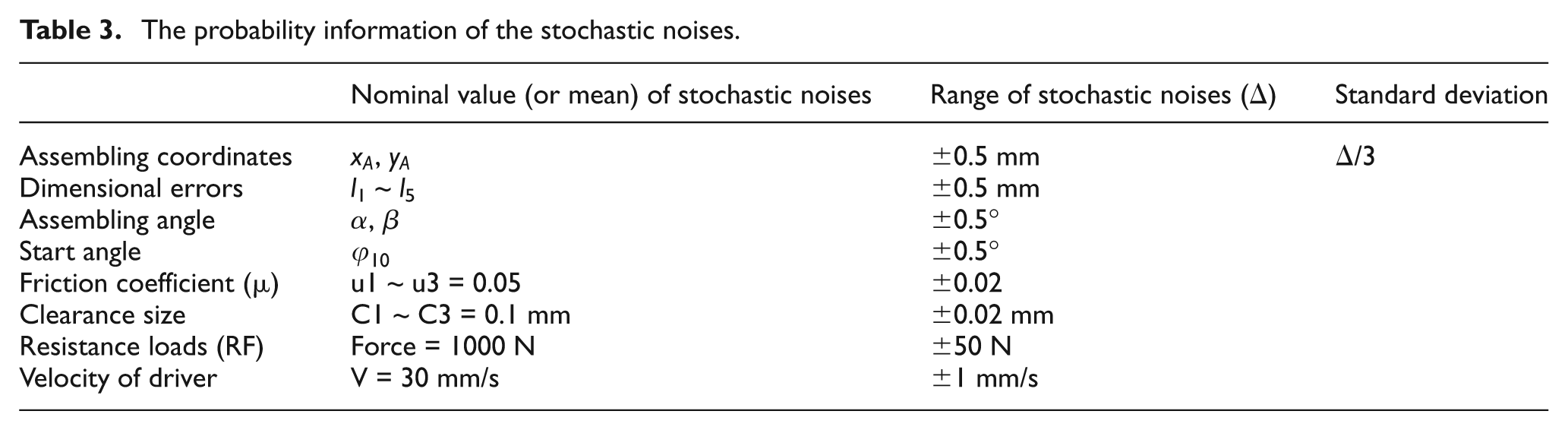
Meanwhile, the stochastic noises
The probability information of the stochastic noises.
In this example, robust design model of the path-generating linkage is given by
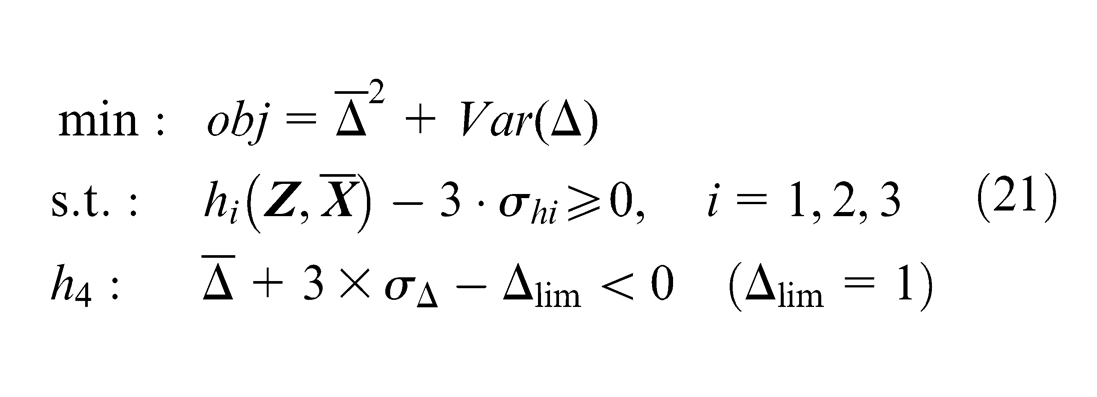
The
The robust design results are shown in Table 4, while the conventional optimal design results are also given for comparison.
Design solutions of path-generating linkage.

In order to further compare the robustness of both solutions, the article first builds the mechanism models based on both solutions and carries out MCS with sampling size N = 1000, respectively, on different mechanism models. Then two criteria are used to estimate the robustness of the solutions:
Criterion 1. For each LHS, compute the total output displacement errors along both X- and Y-axes at different input angles of
Criterion 2. For each LHS, compute the maximum output displacement errors along both X- and Y-axes during the whole running process and express the maximum errors as
Figures 6 and 7 show the total output displacement errors along both X- and Y-axes at different positions of
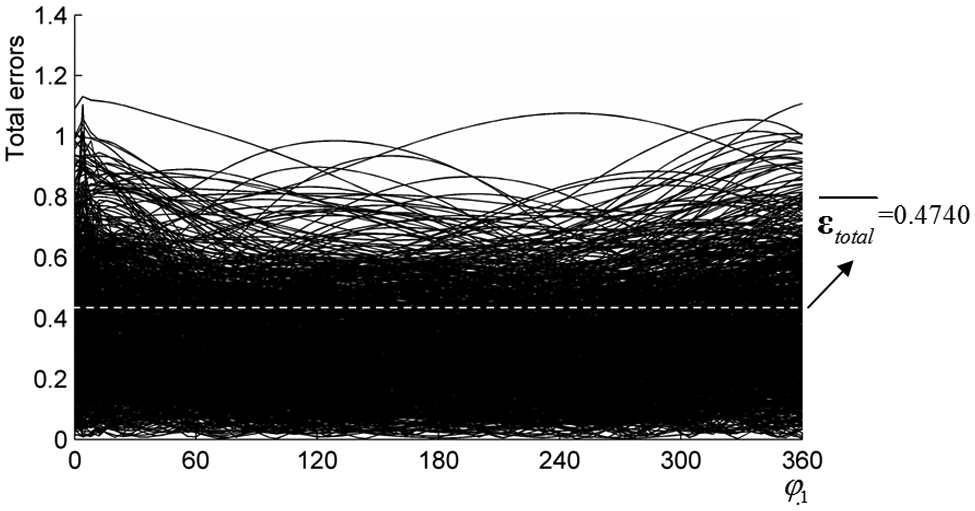
The total errors
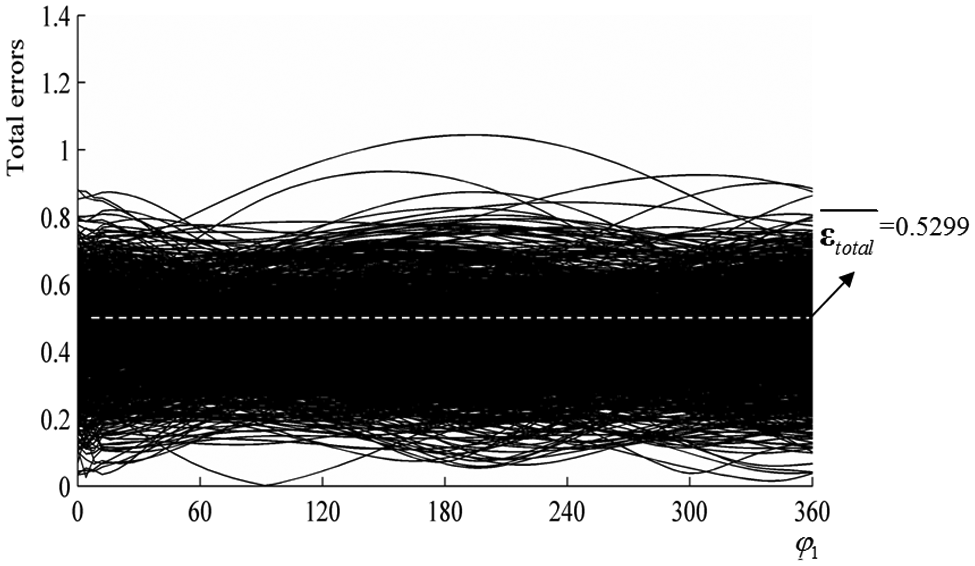
The total errors
Figure 8 shows the maximum output displacement errors along both X- and Y-axes during the whole running process for each LHS based on the configuration of the configuration of the conventional and the robust design solutions. The variation in
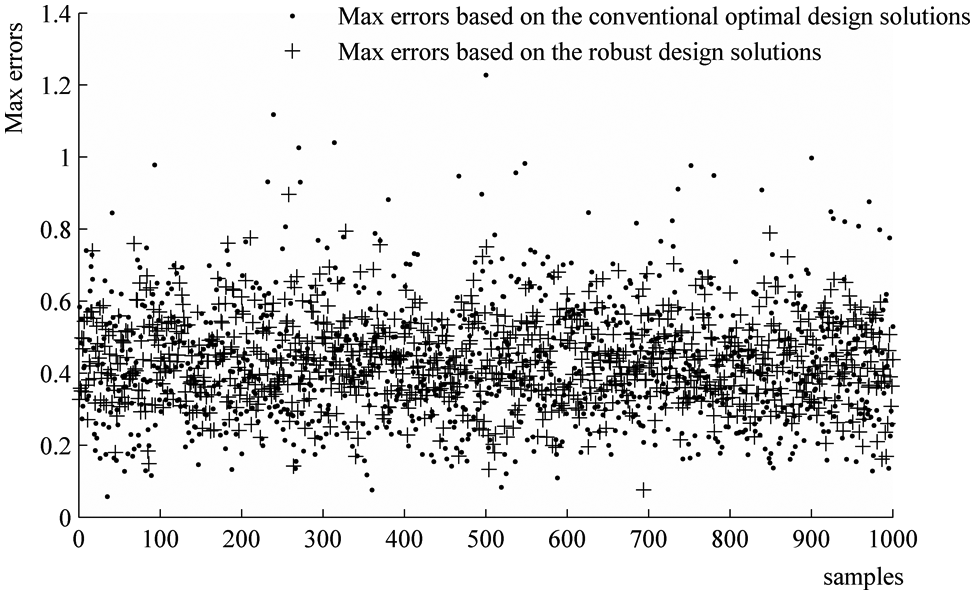
The maximum errors
The results of the maximum output displacement errors
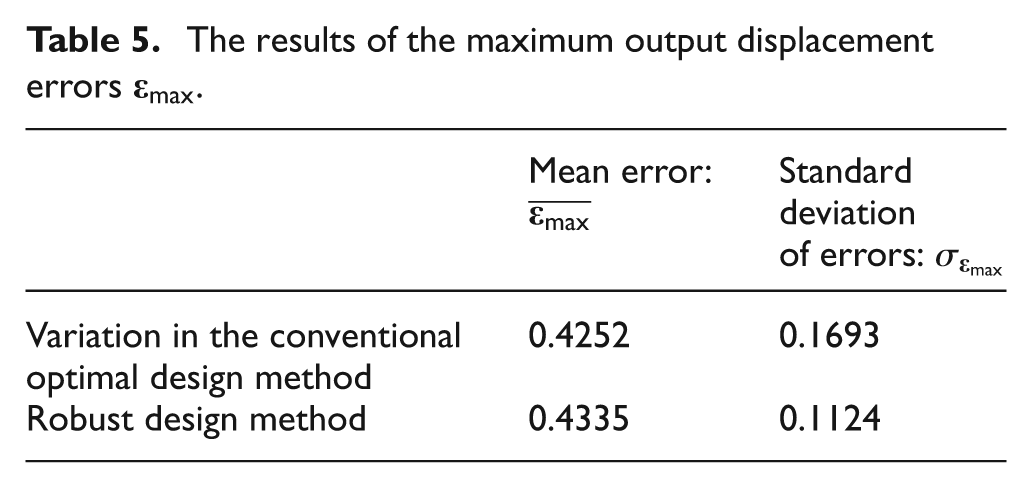
No matter computing the output displacement errors by criterion 1 or criterion 2, both results show that though the mean errors of the conventional design solutions are smaller than those of the robust design solutions, the variance of the output errors is the opposite case. In another word, the solutions of the former are more sensitive to stochastic noises than those of the latter. Besides, the definition of
Conclusion
The article presents a robust design method for the path-generating linkage. In order to make designed results more robust, the proposed method excels in accurately considering the influence of more stochastic noises, which include dimensional errors, assembling errors, pair clearances, friction coefficients, velocity of drivers, external loads and so on by bringing in the multi-rigid-body system dynamics theory and the joint clearance contact theory for building up the mechanism model. Additionally, a fast algorithm is presented to estimate the probabilistic output displacement error of the linkage mechanism and further integrated in robust design of path-generating linkage. Hence, the proposed method in this article is more applicable to engineering practice. Finally, a four-bar path-generating linkage designed by the conventional optimal design method and the presented robust design method is used for comparison, which shows the feasibility and superiority of the latter.
Footnotes
Appendix 1
Acknowledgements
The authors gratefully appreciate the helpful suggestions and careful modifications of the reviewers.
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
The supports provided by National Natural Science Foundation of China (Grant Nos 51305143, 51205141 and 51305142) and the Start-up Foundation of High-talent Research Project from Huaqiao University (Grant No. 12BS204) are acknowledged.