
Abstract
Dual-chamber pneumatic spring vibration isolation tables are commonly used as the base of precision equipment to isolate vibrations from the floor. During the design of dual-chamber pneumatic spring vibration isolation table, transmissibility is often taken as the performance measure, which does not represent the precision requirements directly and could not be adapted to different floor vibration conditions. In this article, a new performance measure is developed to obtain an optimum isolation performance during the design of a dual-chamber pneumatic spring vibration isolation table. Based on the generic vibration criteria, the weighted root-mean-square velocity of platform vibration in one-third octave bands resulting from the floor excitations is used as the new measure. The platform vibration is predicted by establishing a model of dual-chamber pneumatic spring vibration isolation table, which consists of a platform and four dual-chamber pneumatic springs. The model disturbance inputs are actual random floor excitations (7.98 µm/s, vibration criteria-C level), which are obtained by vibration acquisition test in a typical laboratory. The genetic algorithm is applied to solve this nonlinear optimization problem. The maximum weighted root-mean-square velocity of platform with the optimum design isolation table decreases to 2.35 µm/s, which provides a vibration criteria-E level environment.
Keywords
Introduction
Precision equipment, such as scanning electron microscopes, steppers for processing of semi-conductors and optical measurement systems, is highly sensitive to floor vibrations. To obtain required high precision and resolution in such equipment, constraints on the vibration level of the base where the equipment is located on have become more stringent in guidelines or standards.1,2 As a solution, vibration isolation systems (VISs) are commonly utilized to isolate vibrations from the floor.3,4 Over the years, both passive and active VISs have been applied to attenuate the vibration.5,6 Passive VIS uses dampers to absorb vibration energy, while active VIS uses extra power to control vibration. Passive VIS does not require extra power, and usually, it is more convenient than active system. Dual-chamber pneumatic spring vibration isolation table (DCPSVIT) is a typical kind of passive VIS and usually used as a base of precision equipment due to superior stiffness and damping characteristics of dual-chamber pneumatic spring (DCPS).
The DCPSVIT reduces the transmitted vibrations below a certain level to protect the equipment to get desired precision. Since the performance of equipment depends on DCPSVIT, the objective in design of DCPSVIT should focus on precision. During the conventional design of the VIS, the transmissibility of the VIS is often taken as the performance measure to be optimized. Lee and Kim 7 took the minimum peak value of transmissibility as the primary objective. A method of using singular values of the transmissibility matrix as a simple index for vibration isolation performance was suggested in Shin et al. 8 and Swanson et al. 9 Pan and Hansen 10 and Pan et al. 11 considered the use of vibratory power transmission through a collocated active/passive mount as a performance index. Yi 12 took the acceleration of isolation platform, the dynamic deflection of isolation system and the dynamic displacement of the base as optimization performance indicators. However, those kinds of performance measure do not represent the precision requirements directly. Moreover, the transmissibility is the ratio of response and input, which leads that the performance measure cannot be adapted to different floor vibration conditions. The users cannot get a desired vibration environment by those performance measures in design work directly. To the best of the authors’ knowledge, the objective function represented precision directly has not been addressed in prior publications in VIS design.
The generic vibration criteria (VC) (details are shown in Appendix 1) are developed by Eric Ungar and Colin Gordon in the early 1980s and widely accepted as a basis for evaluating the performances of facilities and floor in microelectronics, medical and biopharmaceutical industries. 13 The criteria indicate the “quality” of a floor in terms of its suitability for precision equipment. The criteria take the form of a set of one-third octave band velocity spectra labeled vibration criterion curves VC-A through VC-E. By comparing the floor vibration, which is expressed in terms of its root-mean-square (RMS) velocity with the criteria curves, the precision of equipment under such floor vibration level is determined. The generic VC establish a direct relationship of the vibration level and the precision equipment demand. This relationship could be utilized to solve those problems in VIS design as mentioned in the last paragraph. In this article, based on generic VC, the RMS velocity of platform vibration in one-third octave bands resulting from the floor excitations is developed as performance measure to obtain an optimum isolation performance during a design of DCPSVIT. Unlike the traditional performance measure, the floor vibration is considered in the index. The new performance measure represents the precision directly. Users could know whether their equipment can work in desired resolution.
A DCPSVIT usually consists of four DCPS and a rigid platform. Performance of DCPS has been investigated by several researchers and is found to be much better than the single-chamber pneumatic spring. Lee and Kim 14 proposed a nonlinear complex stiffness model of DCPS, which exhibited a significantly vibration frequency-dependent nonlinear behavior. Furthermore, they proposed a transmissibility design to make the frequency of the maximum damping coincide with the resonance frequency of transmissibility. 7 Because the application conditions of the DCPSVIT are variable, a DCPS with adjustable damping is usually adopted. Pu et al. 15 analyzed the dynamic characteristics of a DCPS with adjustable damping, which demonstrated that variable orifice mechanism (VOM) has the ability to vary complex stiffness distribution in frequency domain.
The platform vibration is predicted by establishing a model of DCPSVIT. In order to calculate the new performance measure, the model disturbance inputs are obtained by actual random floor excitations’ acquisition test. Since the objective function in this article is highly nonlinear, DCPSVIT design is carried out using nonlinear optimization. Classical nonlinear optimization algorithms such as the steepest-descent method require the gradient to be computed during the iterative search process. The objective function used in this article is highly nonlinear and may possess multiple extrema. The optimal solution obtained using classical optimization algorithms may often be trapped in local minima. Genetic algorithms (GAs) that are randomized search techniques have been applied in optimization by many researchers.16,17 To take advantage of GAs as well as to consider more realistic random floor, we implement GAs in this article to solve the optimum DCPSVIT design problem.
The remainder of this article is organized as follows. The new performance measure based on generic VC is described in section “Generic VC-based performance measure.” After that, DCPSVIT model is developed in section “DCPSVIT model.” Next, the disturbance inputs of this model are gained through actual random floor excitations’ acquisition test, which are detailed in section “Floor excitations’ acquisition.” In section “Optimization via GA,” optimization approach via GA is described. Optimization results and analysis are provided in section “Optimization results and analysis.” And conclusions are provided in section “Conclusion.”
Generic VC-based performance measure
According to generic VC, the measured one-third octave band RMS velocity spectrum must lie below the appropriate criterion curve in Appendix 1 Figure 8 at all frequencies. It means that the maximal RMS velocity of vibration in one-third octave bands is the determinant of the isolation performance. Note that slope at the lower frequencies of VC-A and VC-B curves, for the sake of numerical calculation, the RMS velocity at those frequencies should be weighted to make sure that the weighted RMS velocity at all frequencies of one vibration level is the same. In this article, the maximal weighted RMS velocity in one-third octave bands is considered to be performance measure (objective function).
The floor vibration can be regarded as a stochastic process, which is usually evaluated statistic parameter such as the velocity power spectral density (PSD). The relationship of the self-correlation function and the PSD is formulated as follows
where


where the weighting efficient
According to random vibration theory, the velocity PSD of the instrument is formulated as

where
The optimization objective function of this problem is defined as

To improve the isolation performance of the DCPSVIT, the optimization objective
DCPSVIT model
DCPS model
A DCPS is presented as shown in Figure 1. It consists of two chambers, a membrane, a piston and a VOM. The air volume of upper chamber is enclosed by a thin-walled, flexible and pressure resistance round membrane in the top end, while the air volume of lower chamber is only enclosed by metal body. The piston is seated on the membrane, which can support heavy mass with low stiffness in the vertical direction. These two chambers are linked by the VOM in order to obtain high damping effect. The stiffness of the DCPS attributes to two phenomena: internal volume variation due to compression of air in the spring caused by an external force acting on it and the elastic stiffness of the membrane. 18 The damping attributes to air flow through the VOM, which restricts the mass flow rate between two chambers and provides damping to the system. Adjusting the VOM can change the dynamic characteristics of the DCPS.
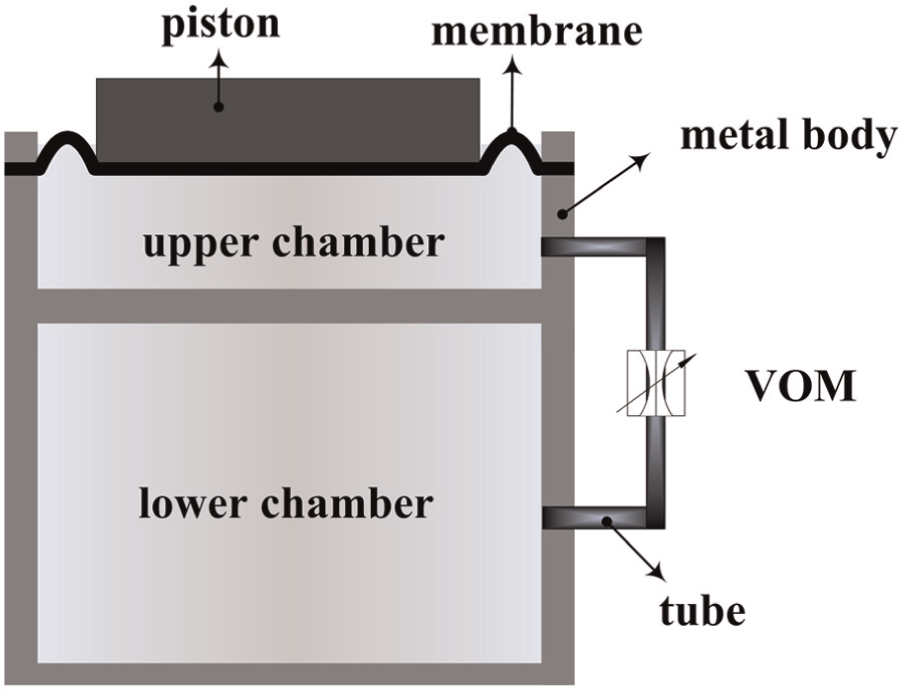
Schematic representation of the DCPS.
The air in the two chambers can be considered to be ideal gas. The gas process that defines the relationship between pressure and volume in both chambers complies with adiabatic, isentropic relationship. The complex stiffness of DCPS due to compression of air and air flow between two chambers is obtained by Pu et al., 15 which can be expressed in equation (6). Table 2 illustrates the meaning of these variables
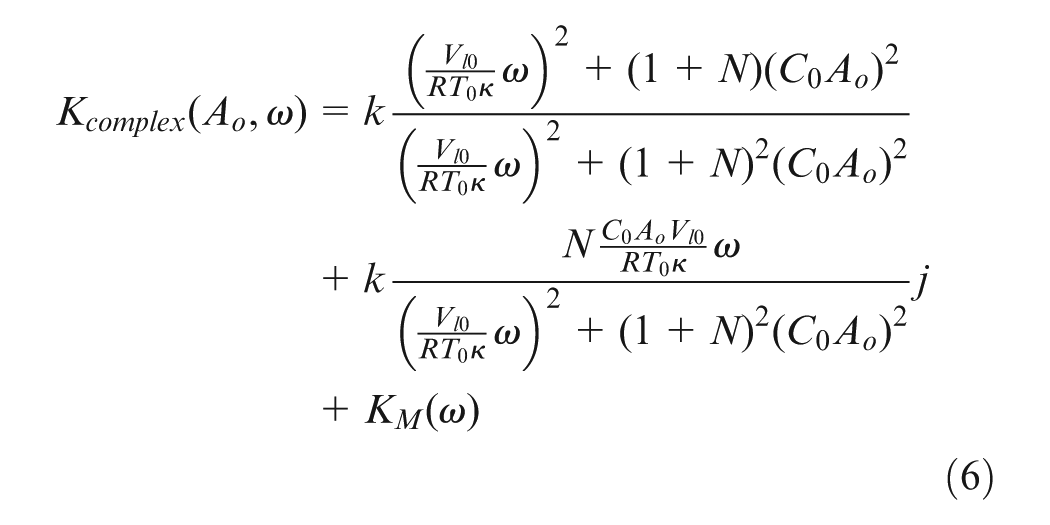
where

The
The displacement transmissibility 19 between the floor and payload mass can be expressed as

The transmissibility of DCPS of equation (7) is computed numerically in the frequency domain. Parameters of these variables are given in Table 1. Figure 2 shows curves of computational simulations along frequency axis, each with different orifice area openings of the VOM, ranging from 0% to 100%. From Figure 3, it is observed that the resonance frequency of the DCPS varies by changing the orifice area opening. The minimum peak value at the resonance frequency appears when the orifice area opening is 10%.
Parameter values of the DCPS used in simulation.
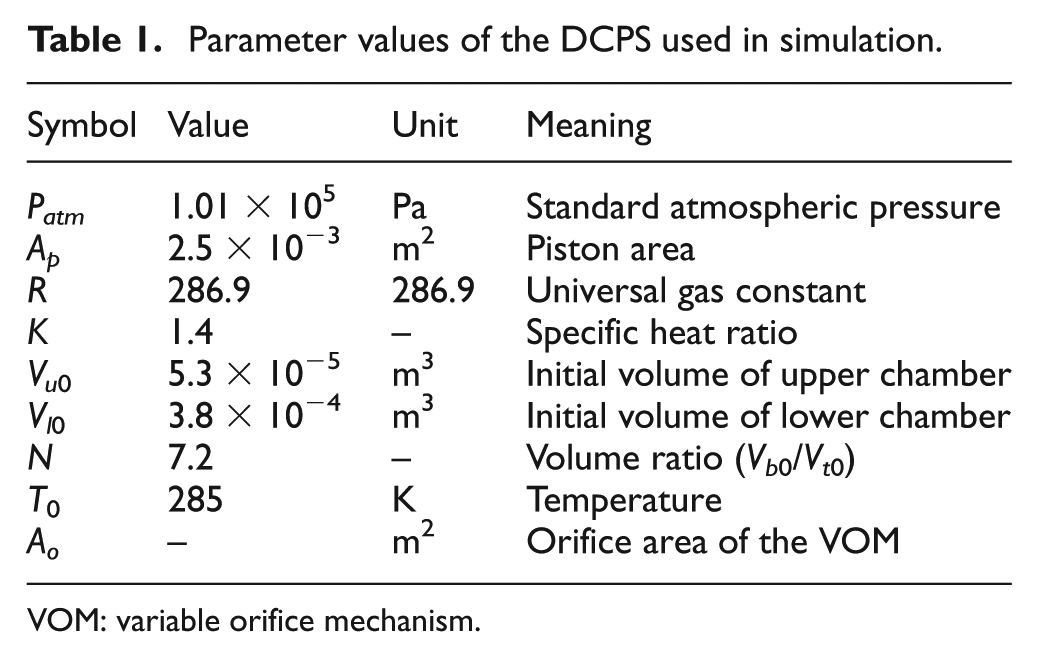
VOM: variable orifice mechanism.
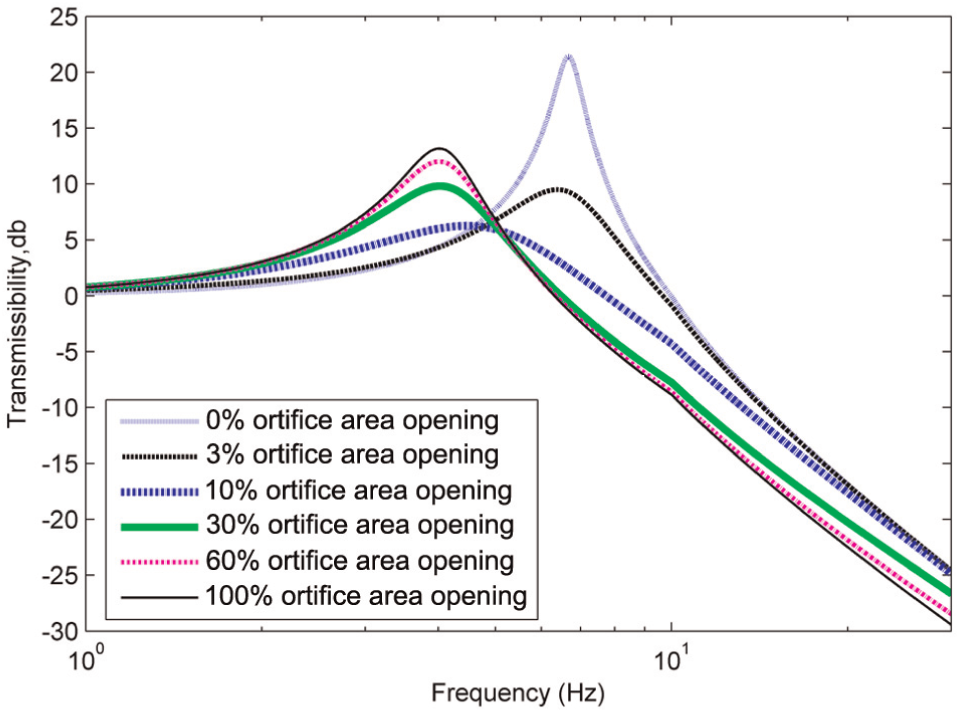
Transmissibility for varying orifice area opening.
A typical four-spring vibration isolation system.
Vibration isolation table model
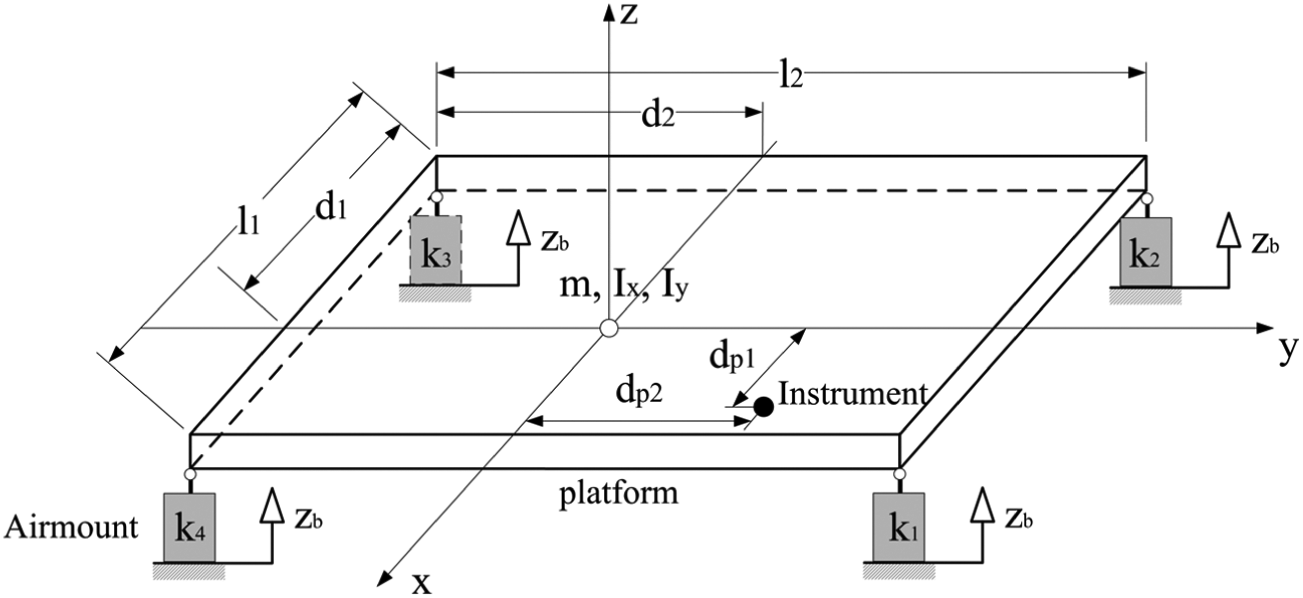
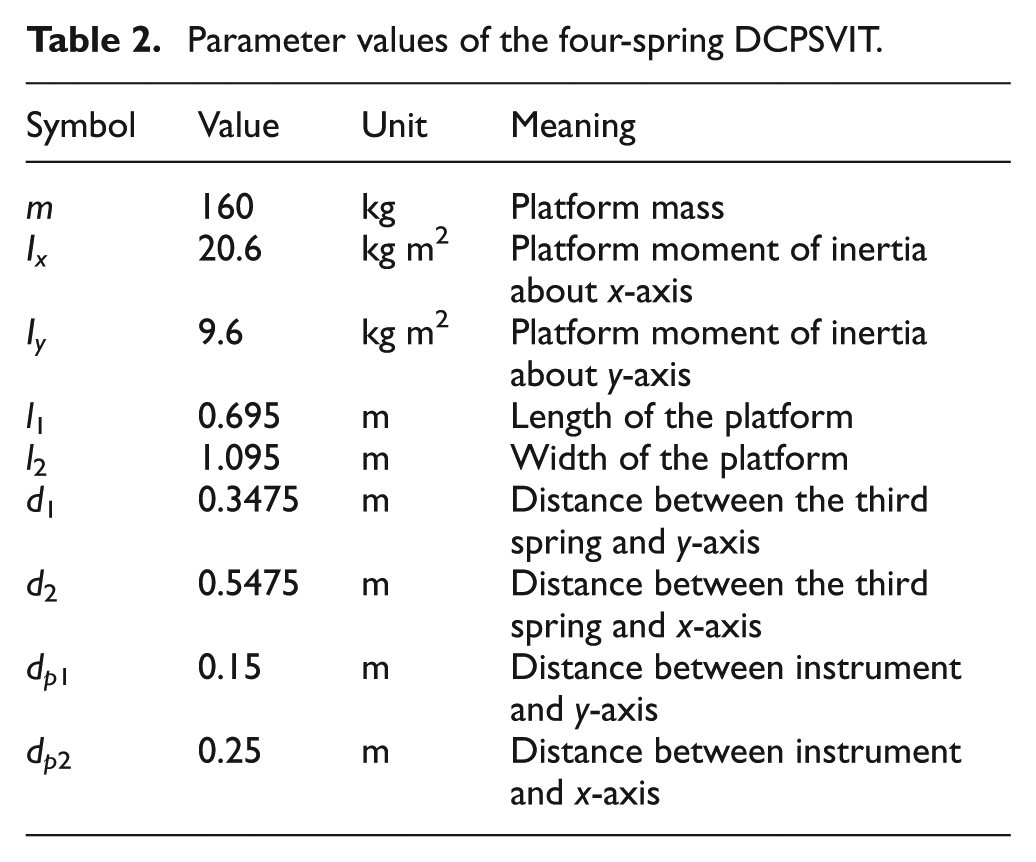
The DCPSVIT plays an important role in the precision manufacturing and scientific research. Usually, the DCPSVIT consists of four DCPSs and a rigid platform. Figure 3 illustrates a typical DCPSVIT with four pneumatic springs considered for optimal design. The parameters are shown in Table 2. Because the first-order modal frequency of VIS is higher than the resonance frequency of the pneumatic spring, the platform can be considered to be rigid structure. The DCPSVIT is used to attenuate vertical vibration primarily. The focus of this article is to study the vertical vibration performance of the DCPSVIT.
Parameter values of the four-spring DCPSVIT.
A global reference frame
The translational and rotational displacements at the COM of the platform with respect to the global reference frame

where the translational displacement

Because the DCPSVIT is only used to attenuate the vertical vibration, it can be considered that

The
According to rigid kinematics, the relationship between

The complex restoring force of the ith pneumatic spring is given as

where

where


Applying the Newton–Euler equation to the isolation system gives

Since the vibration amplitude is very small compared to the size of the platform, equation (17) is linearized as
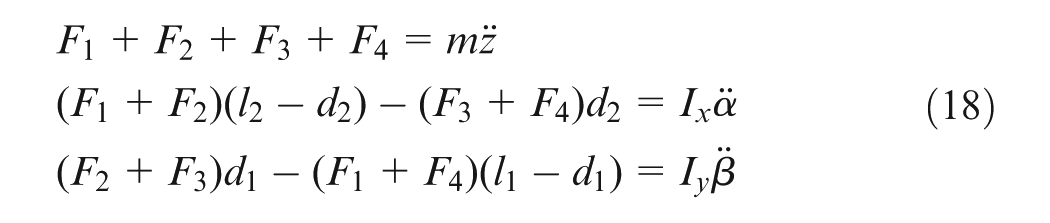
Substituting equations (6), (8) and (13) into equation (18), the frequency response function

where
Floor excitations’ acquisition
Most laboratories will contain some nominal level of floor vibration due to automotive traffic, building sway or lager machinery such as elevators, air compressor or automatic doors. The floor vibration is the main disturbance input for precision equipment. The magnitude of these disturbances is different in each laboratory, so the floor vibration should be identified through experimental method.
In this article, a vibration acquisition test is carried out to obtain the velocity PSD of a typical laboratory, as shown in Figure 4. The laboratory is located on the first floor of a seven-story building, by which an automotive traffic road is near. There are large power air conditionings, air compressor and air shower room in the laboratory. The velocity sensor (Tokyo Sokushin VSE-15D-6, sensitivity: 1000 V/(m/s)) is fixed on the floor by gypsum. LMS Test.Lab (LMS International Co.) is used to acquire and analyze signals to get the velocity of the floor. Considering the need of the acquisition, the sampling rate and the range are 100 Hz and 1–1024 Hz in this test. The RMS velocity spectrum of vibration in one-third octave bands is shown in Figure 5. The highest peak is 8.56 µm/s at 25 Hz, which means the vibration of the laboratory is VC-C level. The actual random floor excitations obtained by vibration acquisition test in typical laboratory are taken as the disturbance inputs.

Vibration acquisition test.
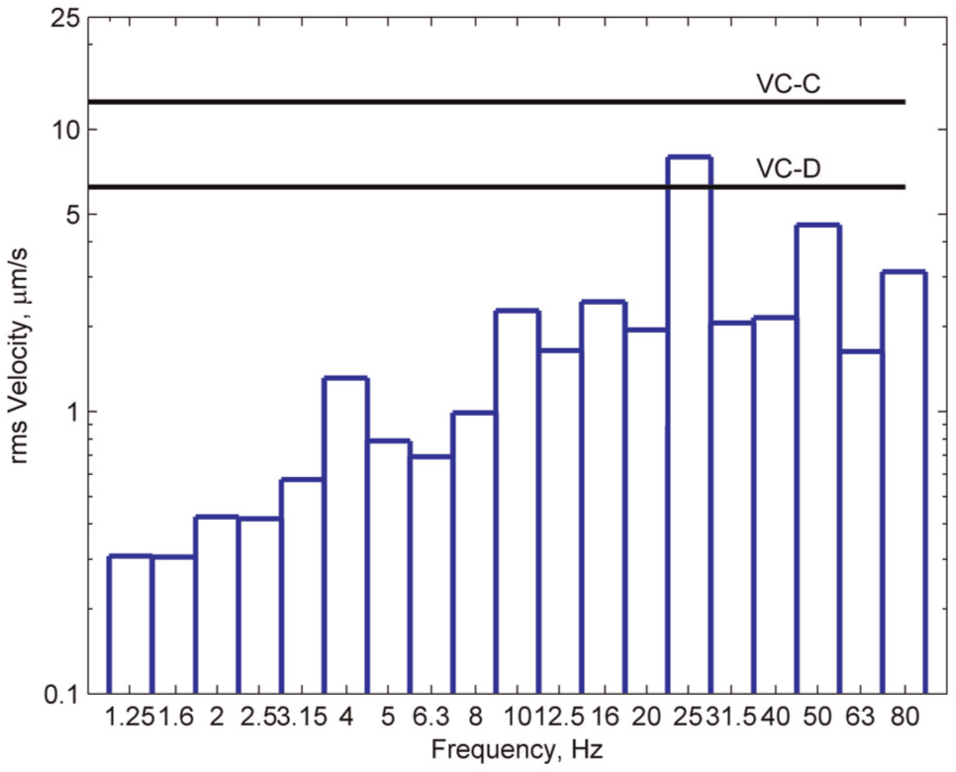
Vibration data from a VC-C level laboratory.
Optimization via GA
GAs were invented in the 1960s. The search procedure is derived from the process of natural selection and evaluation. In natural evolution, each species adopts the philosophy of “survival of the fittest” to adapt a complicated and changing environment. Because of the advantage of a large population of designs, the GA can be regarded as a globe searching procedure, while classical optimization methods work well for searching in small spaces. GAs are stochastic algorithms because the initial group is generated randomly. This means that if a GA runs twice for optimization of the same problem with the same parameters, usually two different answers will be obtained, although they probably are very close to each other.
The optimum design of DCPSVIT can be summarized as follows:
Minimization of objective function:
Design variables:
Constraints:
The above optimization is a nonlinear programming problem. The classical approach to optimization is to use derivative-based methods, which have many disadvantages in this problem. GAs can solve this problem properly.
The schematic representation of a GA is shown in Figure 6. The GA for optimization starts from an initial population, which is created using random samples. The population is then coded into chromosomes, a binary representation of a design, which consists of smaller strings that decode to a value for each design variable. Each design variable has seven binary sites so that there are 27 = 128 possibilities and (27) 4 = 2.7 × 108 possible designs. Given a current generation of designs, there are three steps used to implement the algorithm: reproduction, crossover and mutation. 20
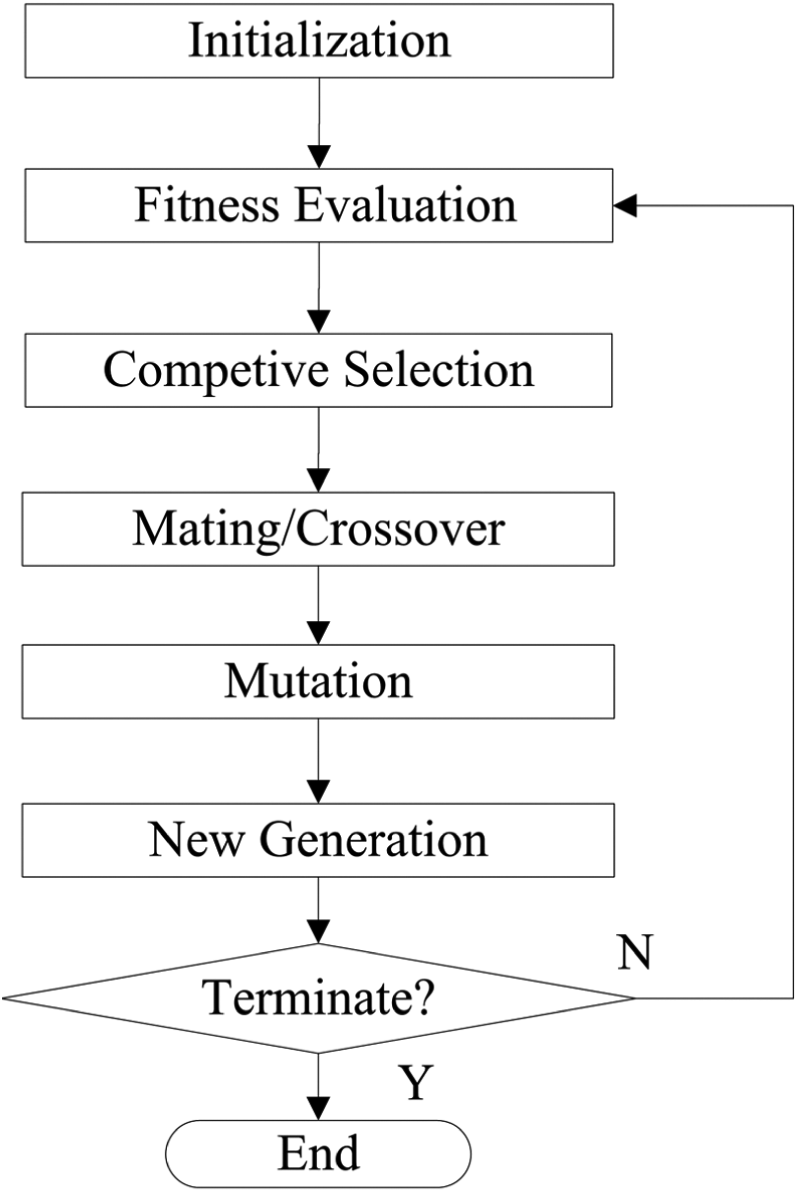
Schematic representation of a genetic algorithm.
Reproduction is performed by copying a current generation into a new generation according to the fitness, which is constructed by reforming the objective function. The GA searches the maximum fitness, while the objective function needs to be minimized. The fitness

The crossover and mutation are used to improve the globe searching ability of GA. They should be chosen carefully because high crossover and mutation rate will damage the GA’s convergence.
An optimization is implemented using the parameters 2%, 25% and 100% are chosen as the appropriate selection of mutation rate, crossover rate and population size, respectively, through preliminary analysis. The number of generations is determined using the convergence criterion during the iteration. The average value of the objective function at each generation is shown in Figure 7. The result curves of three programs runs are drawn in this figure. The convergence is evaluated using the average value of the population. The four orifice area openings corresponding to the optimum value of the objective function are 10.2%, 3.2%, 3.2% and 21.3%.
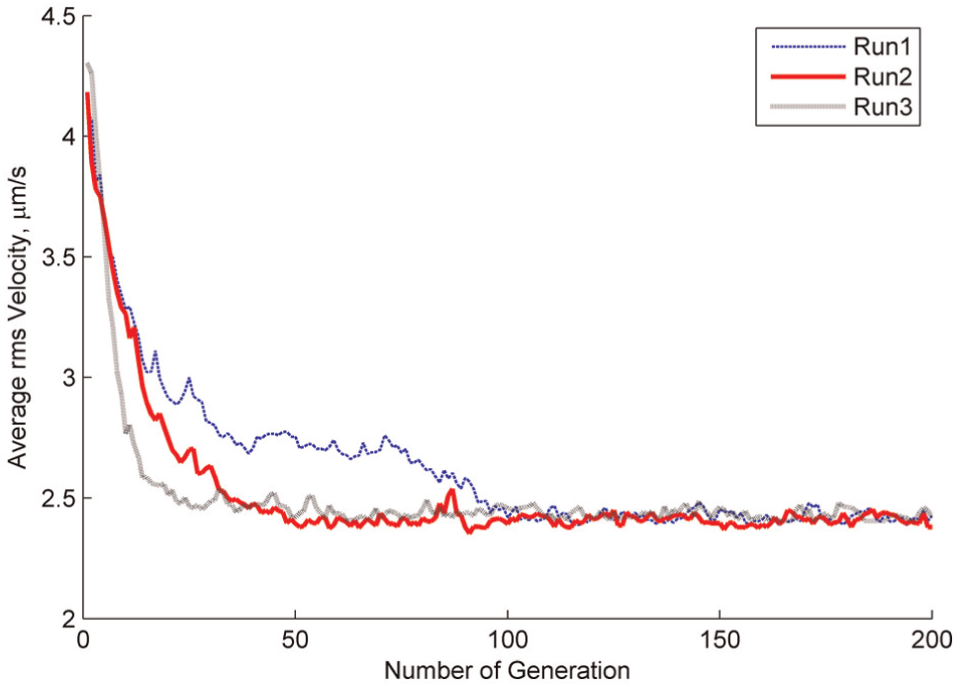
Average values of 200 populations at each generation.
Optimization results and analysis
The optimum design orifice area openings for DCPSVIT are found to be 10.2%, 3.2%, 3.2% and 21.3% in section “Optimization results and analysis.” Because the COM of the platform and payload equipment is not always in its geometric center, the four orifice area openings are different values. The maximum weighted RMS velocity of platform decreases from 7.98 to 2.35 µm/s, which means that the DCPSVIT improves the equipment vibration from VC-C level to VC-E level.
Pu et al. 15 proposed a transmissibility method to find the best opening area by making the frequency point of the maximum loss stiffness to equal to the resonance frequency. The best orifice area openings are 10.2%, 10.2%, 10.2% and 10.2% by that method. The maximum weighted RMS velocity of platform decreases to 2.62 µm/s. Comparing the two approaches, it can be found that the performance of the platform improves 10.3% by proposed method. Table 3 shows the comparison of two objective functions. It can be found that the optimum design with new performance measure can make the equipment getting higher precision than traditional methods.
Comparison of two objective functions.

RMS: root-mean-square.
The optimization work in this article is an application example of the generic VC-based VIS design. The framework provided in this article can also be used for efficient design of other floor vibration situation and other isolation systems.
Conclusion
In this article, based on the generic VC, the weighted RMS velocity of platform vibration in one-third octave bands resulting from the floor excitations is proposed in the design of VIS. Different from the traditional performance measure, the new performance measure represents the precision directly. Users could know whether their equipment can work in desired resolution in present design. As an example of VIS design, the weighted RMS velocity of platform vibration in one-third octave bands is used as objective function in the DCPSVIT design. The result illustrates that the performance of the DCPSVIT improves 10.3% by proposed method comparing with conventional transmissibility method. It has also shown the efficiency of the GA in solving nonlinear optimization problem. The framework provided in this article can also be used for efficient design of other floor vibration situation and other VIS.
Footnotes
Appendix 1
Declaration of conflicting interests
The authors declare that there are no conflicts of interest.
Funding
This study was supported by the National Natural Science Foundation of China (No. 51235005 and No. 51121002) and the Major State Basic Research Development Program of China (973 Program) (No. 2009CB724205).