
Abstract
In precision metrology, the form errors between the measured data and reference nominal surfaces are usually evaluated in four approaches: least squares elements, minimum zone elements, maximum inscribed elements and minimum circumscribed elements. The calculation of minimum zone element, maximum inscribed element and minimum circumscribed element is not smoothly differentiable, thus very difficult to be solved. In this article, a unified method is presented to evaluate the form errors of spheres, cylinders and cones in the sense of minimum zone element, maximum inscribed element and minimum circumscribed element. The primal–dual interior point method is adopted to solve this non-linearly constrained optimisation problem. The solution is recursively updated by arc search until the Karush–Kuhn–Tucker conditions are satisfied. Some benchmark data are employed to demonstrate the validity and superiority of this method. Numerical experiments show that this optimisation algorithm is computationally efficient and its global convergence can be guaranteed.
Keywords
Introduction
In precision engineering, form errors are crucial for their functionalities, for example, vibration of shafts and wear of contact elements. Form errors are defined as the relative deviation between the measured data and the reference nominal surfaces. The reference surfaces are usually fitted from the discrete data points in the sense of least squares elements (LSEs), minimum zone elements (MZEs), maximum inscribed elements (MIEs) and minimum circumscribed elements (MCEs). 1 The MZE encloses all the measured data points between two coincident geometry elements. Among the four fitting criteria, the MZE approach can obtain the smallest form error, and it complies with the definition of form error in ISO 1101, 2 which is consistent with the tolerance design. In contrast, the MCE and MIE are realised by one-sided fitting, which constraints all the data points to be outside the inscribed geometry elements or inside the circumscribed elements. MCE is suitable for the convex geometry with the maximum material condition, while the MIE is suitable for the geometry with the maximum material condition of a concave shape. The calculation of MZE, MIE and MCE is a constrained non-linear optimisation problem and very difficult to be solved. As a consequence, most commercial precision instruments conduct least squares fitting, and the form errors in the sense of MZE are evaluated by subtracting the maximum and minimum deviations from the data points to the fitted surface. But this will lead to overestimation, and unnecessary rejections of qualified parts may occur. Therefore, appropriate objective functions should be employed for the evaluation of form errors, and proper solving algorithms need to be developed accordingly.
Literature review
Spheres, cylinders and cones are ubiquitous in the shapes of industrial components. In fact, more than 70% of the functional parts in precision machines can be modelled using these simple shapes. Researchers have developed various methods to evaluate the form qualities of simple geometries in the sense of MZE.
The minimum zone fitting of circles and spheres are quadratic programming problems. Chetwynd 3 and Kanada 4 iteratively linearised the formulation and solved it using the simplex technique. Goch and Lübke 5 approximated the Chebyshev norm fitting by lp norm fitting with 50 ≤ p ≤ 100. Obviously, it is equivalent to Chebyshev norm fitting when p →∞, but when p grows larger, the observation matrix will be seriously ill conditioning, and the solution becomes very unstable. Al-Subaihi and Watson 6 also recursively approximated the minimax problem by linearisation, and the new optimisation problem is solved using the Gauss–Newton algorithm. All these approximation techniques suffer from slow convergence, especially when the solutions approach the regions of optima.
Rather than approximation, much effort has been made to directly solve the minimum zone fitting problems. Computational geometry–based methods have drawn extensive attention, such as vertex points, 7 Voronoi diagrams, 8 convex hulls, 9 α-hulls 10 and so on. However, these methods have serious limitations in restricted applicability. They require analysing the specific geometry conditions in each individual case for different shapes and error metrics, thus very inconvenient to apply. Moreover, some heuristic search methods, such as differential evolution 11 and genetic algorithm, 12 can also be adopted. These techniques are easy to implement and able to solve very complex optimisation problems, but they suffer from high computational complexity. In addition, the solutions are not deterministic, that is, the solution obtained at each run varies due to the randomness introduced in the evolution process.
Concerning the MIE and MCE fitting of spheres, cylinders and cones, little work can be found in literature, especially for cones. Goch and Lübke 5 first carried out Chebyshev norm fitting by reducing one degree of freedom, say, radius of the cylinder, and then the radius was adjusted to ensure that all the data points are inside the circumscribed element or outside the inscribed element. Similar to minimum zone fitting, the solutions attained by this approach are approximation of the real one, and the convergence rate is very slow. In fact, heuristic searching algorithms can be directly applied here, but they suffer from the same problems with the minimum zone fitting mentioned earlier.
In this article, the fitting problems are converted into a differentiable optimisation problems with non-linear constraints. Then, a unified solving algorithm, called the primal–dual interior point (PDIP) method, can be employed. As a consequence, the fitting of different shapes with different optimisation criteria can be accomplished in the same procedure, just with some extra operations of selecting appropriate objective functions and constraints.
The PDIP algorithm
For an optimisation problem with inequality constraints
where f: R n → R and {dj: R n → R, j = 1, …, N} are twice continuously differentiable functions. The generalised Lagrangian function of this constrained optimisation problem is
where {ωj≥ 0} are generalised Lagrangian multipliers. The first-order necessary optimality conditions of the constrained optimisation problem are 13
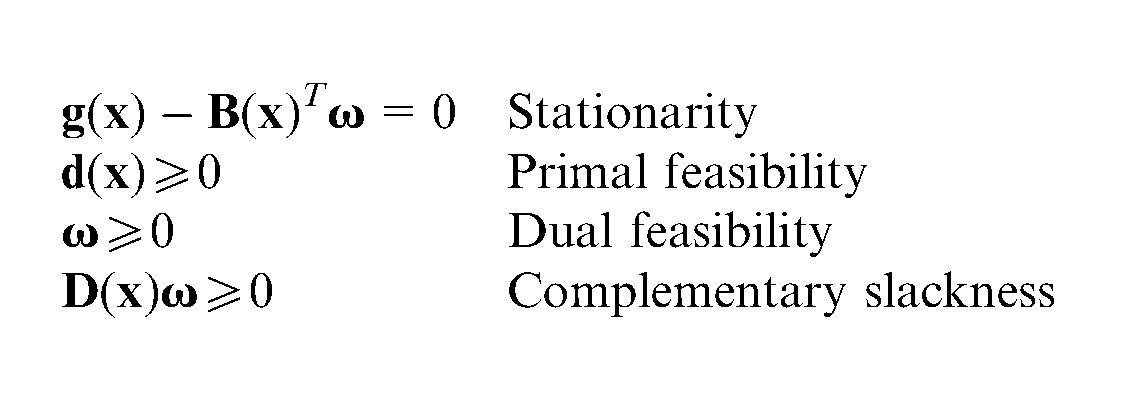
where
These optimality conditions are also called the Karush–Kuhn–Tucker (KKT) conditions. The solution
The multipliers
A PDIP method can be applied to find the optimal solution
Algorithm 1. Procedure of the PDIP algorithm
Step 1. Initialise parameters
Set
Step 2. Compute incremental direction
Compute (Δ
with
If
Set
Set
Compute (Δ
Set
Set δ
If this is infeasible or unbounded or
Step 3. Arc search
Compute α, the first in the sequence {1, η, η2, …} satisfying
Step 4. Update
Go to Step 2.
The global convergence condition for the sequence of solution
and
Therefore, at each iterate, it needs to check whether the matrix
One major superiority of this algorithm over other gradient-based iterative methods like sequential linear/quadratic programming is, the configuration parameters can be flexibly adapted according to the numerical properties of specific optimisation problems. Global optima can be obtained by relatively low computational cost.
Mathematical formulation of form error evaluation
In the field of metrology, the representations of ‘reference surfaces’ are conventionally adjusted to fit the measured data. This approach is convenient for planes and spheres since their mathematical functions keep similar forms after translation and rotation. But for cylinders and cones, the representations will become unbearably complicated when the surfaces are not at the ‘standard positions’. It has been strictly proved that when the form deviations are measured in the normal directions of the reference surfaces, moving the data is equivalent to transforming the fitted surfaces, 16 and the evaluated results of the form errors are the same. As a consequence, transformations are always performed on the measured data for the sake of numerical simplicity.
For the minimum zone fitting problem, symmetric tolerances are considered here only, thus MZE fitting is a Chebyshev norm fitting problem. It can be converted into a constrained optimisation problem very straightforwardly

with ei denoting the Euclidean distance from the data point
The MIE and MCE fitting originate from the maximum material requirement on mating components in assembly of parts. 17 For spheres and cylinders, the MIE fitting is to maximise the radii of inscribed spheres/cylinders and the MCE fitting is to minimise the radii of circumscribed spheres/cylinders. But there is no such a simple intrinsic characteristic (shape parameter) to be taken as an objective function to indicate the sizes of cones. Therefore, an alternative approach is needed to perform the MIE/MCE fitting of cones.
We return to the MIE fitting of cylinders
Obviously, it is equivalent to
Here,
An extra variable D is employed as the objective function. The variables and constraints of MZE, MIE and MCE are listed in Table 1 for spheres, cylinders and cones, respectively. Here,
Mathematical formulation of form error evaluation of the IP method.

MZE: minimum zone element; MCE: minimum circumscribed element; MIE: maximum inscribed element.
Numerical validation
The effectiveness of this algorithm is demonstrated by several benchmark data sets seen in literature. Here two spheres, two cylinders and two cones are employed. The best fitting results found in literature are also presented for comparison. The form evaluation programs using the PDIP algorithm are coded with MATLAB and run in a personal computer (PC).
The evaluation results of the spheres and cylinders are shown in Table 2. Chen and Liu 18 evaluated the form errors of spheres by identifying the distribution of the vertex points and then solving simultaneous linear equations. The cylindricity problem was solved by genetic algorithms in the study by Lai et al. 19 and by sequential linear programming in the study by Carr and Ferreira. 20 It can be seen that the proposed algorithm can always obtain better or equivalently good results with the techniques in literature. It is worth noting that for the maximum inscribed evaluation of Sphere 1 given in the study by Chen and Liu, 18 the obtained radius of the IP method is greater than the reference, which implies that the PDIP algorithm overcomes the local minimum problem of Chen et al.’s algorithm.
Comparison on the evaluation results of spheres and cylinders
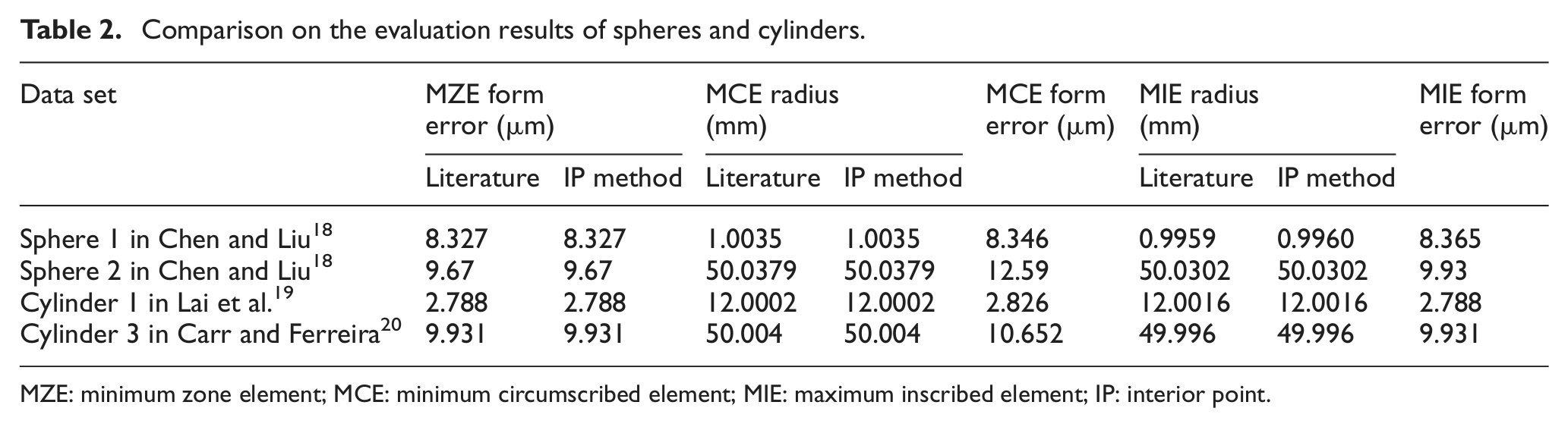
MZE: minimum zone element; MCE: minimum circumscribed element; MIE: maximum inscribed element; IP: interior point.
Table 3 presents the results of cone fitting. Chatterjee and Roth 7 adopted a simplex search method for the vertices to achieve an optimum for Chebyshev fitting. Huang and Lee 21 implemented the form error evaluation using the minimum potential energy algorithm, which is stimulated by the techniques in mechanics. The calculated results of MZE by the PDIP method is equivalent to the results obtained by Chatterjee and Roth 7 and can obtain a little better result for Cone 2 in the study by Huang and Lee. 21 As far as the authors know, there are no publications concerning the quantitative evaluation of form errors of cones in the sense of MCE and MIE yet, thus comparison cannot be undertaken for them. The results shown in Table 3 are to be verified and compared for the readers in the future.
Comparison on the evaluation results of cones.
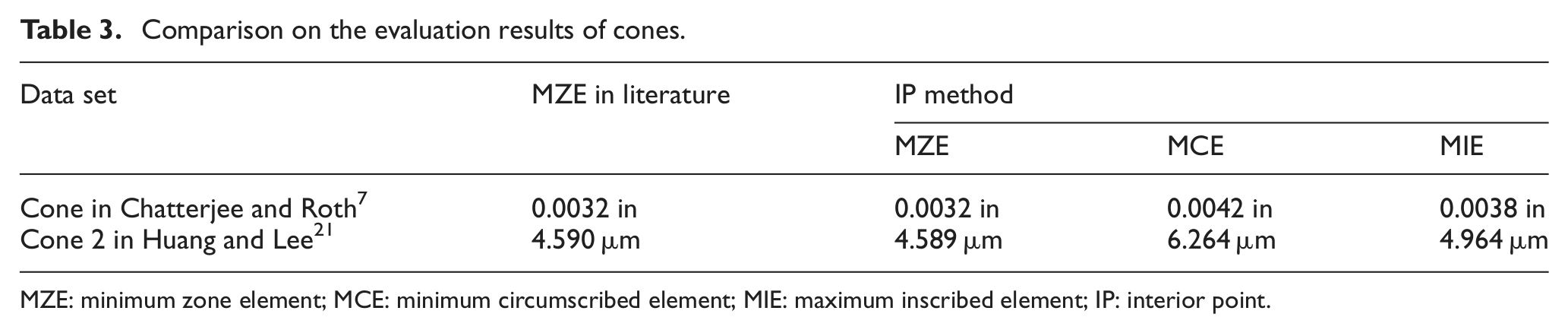
MZE: minimum zone element; MCE: minimum circumscribed element; MIE: maximum inscribed element; IP: interior point.
It has to be stressed that the solutions of MZE, MCE and MIE fitting of spheres/cylinders/cones are not unique,
1
which means that the locations and orientations of the fitted elements may differ even for the same data set. The initial solution
Conclusions
In this article, form error evaluations based on MIE, MCE and MZE are discussed. These optimisation problems are solved using the PDIP method. During the iteration process, the Lagrangian functions are solved to work out the incremental directions of the solution and the auxiliary weighting vector. Arc search is employed to determine the step lengths. The Hessian matrix needs to keep positive definite to guarantee global convergence. Numerical experiments proved that the present algorithm works well for spheres, cylinders and cones. The obtained results are no worse than any techniques found in literature. The present method can obtain global optima by much less computational effort than sequential linear/quadratic programming techniques and heuristic searching algorithms. Compared to computational geometry methods, this algorithm is versatile and can be employed to the form error evaluation of various shapes by different error metrics, as long as the fitting problem can be converted into a differentiable optimisation problem with inequality constraints. Therefore, the PDIP method is very promising for evaluating the form errors of complex surfaces in the sense of MZE, MIE and MCE.
Footnotes
Appendix 1
Funding
This study was supported by the European Research Council through its program ERC-2008-AdG 228117-Surfund and National Natural Science Foundation of China through its grant 51205064.