
Abstract
Strain sensors play a critical role in flexible electronics; however, conventional devices are often constrained by a narrow sensing range, low sensitivity, and intrinsic brittleness, which limit their practical applicability. In this study, a novel intelligent silicone rubber–based strain sensor was developed based on a force–electric coupling mechanism. The sensor incorporates a three-carbon topological conductive network (MCGVM), composed of carbon black (CB), graphene (GR), and multi-walled carbon nanotubes (MWCNTs) embedded in a silicone rubber (SR) matrix. The synergistic interaction among the three carbonaceous fillers promotes uniform dispersion within the matrix, resulting in a remarkably low percolation threshold (0.52 wt%) and enhanced interfacial interactions. Consequently, the MCGVM sensor exhibits an ultrawide strain sensing range of 342.62%, an exceptionally high gauge factor (GF = 43,207.05), and a stable, shoulder-effect-free resistance–strain response over 10,000 loading–unloading cycles. Furthermore, the underlying force–electric coupling behavior is systematically interpreted using a tunneling effect–based theoretical model. These results demonstrate the strong potential of MCGVM for high-performance, wide-range strain sensing applications in flexible electronics.
Keywords
Introducition
Flexible strain sensors are essential components in modern flexible electronics, enabling accurate detection of mechanical deformation in applications such as wearable devices, human–machine interfaces, and intelligent robotics.1–3 For example, Kasim et al. 4 enhanced the performance of highly stretchable strain sensors by exploiting the synergistic effects of graphene (GE) nanosheets and carbon black (CB) fillers in a rubber matrix. Ahmed et al. 5 developed highly sensitive piezoresistive flexible strain sensors by preparing conductive polymer composites using dimethylformamide as a solvent and chloroform as a dispersant. Gunes et al. 6 fabricated flexible strain sensors by three-dimensionally printing a liquid conductive silver ink onto flexible substrates produced via fused deposition modeling (FDM). By converting mechanical strain into measurable electrical signals, these approaches enable real-time monitoring and feedback for deformation sensing and control. In practical applications, however, strain sensors are frequently exposed to continuous dynamic and static loading, as well as complex service environments, which can induce material degradation, signal drift, and a progressive loss of sensing accuracy. Although existing strain sensing strategies, including deep learning–based approaches, active sensing systems, and wireless sensor networks, provide certain detection capabilities, they still encounter substantial limitations.7–9 These challenges include high deployment and maintenance costs, vulnerability to electromagnetic interference, data transmission latency, and the limited generalization ability of machine learning models trained on insufficient datasets. Furthermore, conventional strain sensors often suffer from low sensitivity, restricted flexibility, narrow sensing ranges, and poor environmental stability, thereby constraining their use in high-performance flexible electronics applications.10–12
Rubber-based composites have emerged as promising materials for flexible strain sensors due to their inherent elasticity, durability, and tunable mechanical properties.13–15 Incorporation of conductive fillers—such as graphene (GR),16,17 conductive carbon black (CB),18,19 multi-walled carbon nanotubes (MWCNTs),20,21 and carbon fibers (CF) 22 —into elastomer matrices enables the formation of interconnected conductive networks. These networks exhibit resistance–strain coupling behavior, in which mechanical deformation induces measurable changes in electrical resistance, allowing real-time strain monitoring. To improve sensor performance, various strategies have been explored, including optimization of MWCNT loading, surface modification of MWCNTs with dispersants, construction of bicontinuous conductive structures, application of silane coupling agents to CB, and the introduction of biomimetic architectures.17,23–25 Although these approaches have enhanced sensing properties, several challenges remain, such as limited sensitivity, the occurrence of shoulder-peak effects in resistance signals, reliance on chemical reagents, environmental concerns, and complex fabrication processes.
In this study, methyl vinyl silicone rubber (VMQ) was used as the elastomeric matrix, while GR, MWCNTs, and CB) were incorporated to fabricate a series of single-, dual-, and ternary-filler composites. Distinct from conventional conductive elastomers, a three-carbon topological conductive architecture integrating point-like CB, line-like MWCNTs, and surface-like GR was deliberately designed to overcome the long-standing trade-off among sensitivity, stability, and sensing range. This topology enables the formation of a highly recoverable and strain-sensitive conductive network, effectively suppressing the shoulder-peak effect under large deformation and long-term cyclic loading. By combining systematic electromechanical characterization with a tunneling effect–based Kraus model, the force–electric coupling mechanism is quantitatively elucidated, revealing the intrinsic relationship between conductive network topology, fitting parameters, and the exceptionally high gauge factor. Overall, this work demonstrates that topological conductive network engineering provides a viable pathway to simultaneously achieve an ultrawide sensing range, ultrahigh sensitivity, and stable resistance–strain responses, offering new insights into the design of high-performance flexible strain sensors.
Experimental Section
Materials
Methyl vinyl silicone rubber (VMQ, grade: 110-2S) was purchased from Dongjue Organosilicon Nanjing Co., China. Multi-walled carbon nanotubes (MWCNT; length: 1–10 μm, diameter: 5–8 nm, BET surface area: 100–200 m2/g, purity >98%) and conductive carbon black (CB; oil absorption value: 330 m2/g, particle size: 12 nm) were both supplied by Chengdu Organic Chemistry Co., China. Graphene (GR; sheet diameter >50 μm, number of layers <1 wt%, purity >98 wt%) was also obtained from Chengdu Organic Chemistry Co. Diisopropyl peroxide (DCP; analytically pure) was provided by Shanghai McLean Biochemical Technology Co., China, and originally produced by Jiangsu Qiangsheng Chemical Co., Ltd. Silicon dioxide (SiO2; purity >99.8%, BET surface area: 300 m2/g, particle size: 7–40 nm) was also sourced from Shanghai McLean Biochemical Technology Co. Hydroxyl-terminated silicone oil (HPMS; analytically pure) was obtained from Anhui Aita Silicone Oil Co., China. Silicone rubber adhesive (J-520S) was purchased from Dongguan Jule Electronic Materials Co., China.
Preparation Process of Novel Smart Rubber Sensor (NSR)
Firstly, VMQ was sheeted using a double-roll mill. Conductive fillers—MWCNT, CB, and GR—were sequentially added and thoroughly mixed with the VMQ to ensure uniform dispersion within the matrix. Subsequently, SiO2, HPMS, and DCP were introduced, and mixing was continued for a total of 40 minutes. The double-roll mill was maintained at a temperature of 40°C, with a roll gap of 1 mm and a roll speed of 25 mm/min−1. The resulting conductive mixture was then molded using a plate vulcanizer at 170°C under a pressure of 10 MPa for 10 minutes. A secondary vulcanization step was performed in an oven at 200°C for 4 hours to complete the curing process and obtain the final NSR specimens. In all formulations, the VMQ content was fixed at 3 g. The MWCNT, CB, and GR contents were varied from 0 to 12 wt%, while SiO2, HPMS, and DCP were added at 5 wt%, 6 wt%, and 1 wt%, respectively. The resulting conductive rubber composites were designated as follows: MWCNT/VMQ (MVM), CB/VMQ (CVM), GR/VMQ (GCM), MWCNT–CB/VMQ (MCVM), MWCNT–GR/VMQ (MGVM), GR–CB/VMQ (GCVM), and GR–MWCNT–CB/VMQ (MCGVM). The detailed preparation process is illustrated in Figure 1(a). Representative images of the seven types of NSR are shown in Figure 1(b), while Figure 1(c) presents a close-up view of the MCGVM specimen. Figure 1(d)–(f) depicts the MCGVM under tensile, torsional, and bending conditions, respectively. (a) Preparation process of NSR; (b) Sample plots of seven NSR; (c) Sample plots of MCGVM; (d∼f) Sample plots of MCGVM in tension, torsion, and bending.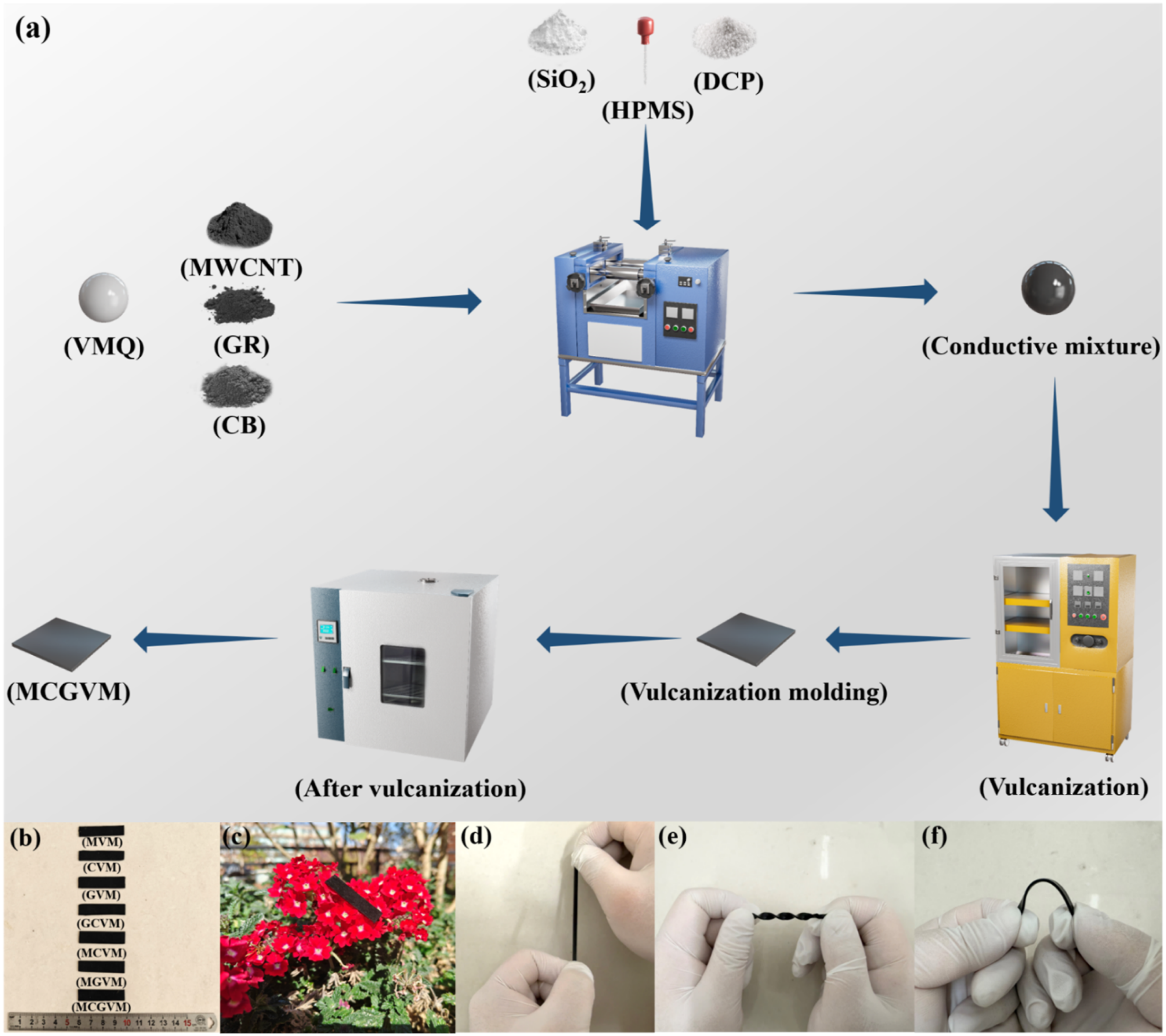
Characterization
The electrical resistance of the NSR specimens was measured using a digital multimeter (Agilent 34410A, Keysight Technologies, USA). The cured composites were cut into specimens (40 mm × 10 mm × 1 mm) for electrical measurements. The resistance was continuously recorded for 90 s to ensure signal stability, and the averaged value was used for analysis. At least three independently prepared specimens were tested for each formulation to confirm measurement reproducibility. The volumetric conductivity (σ, in S/m) was calculated using the following equation:

Results and Discussion
Electrical Conductivity of Novel Smart Rubber Sensor (NSR)
Figure 2(a) shows that the volumetric conductivity of the seven NSR systems increases with increasing conductive filler content, exhibiting a clear percolation behavior.
26
According to percolation theory,
27
the relationship between volumetric conductivity (σ) and filler content (φ) can be described as: (a) Volumetric conductivity of seven NSR. (b) Fitted curves of seepage thresholds for seven NSR.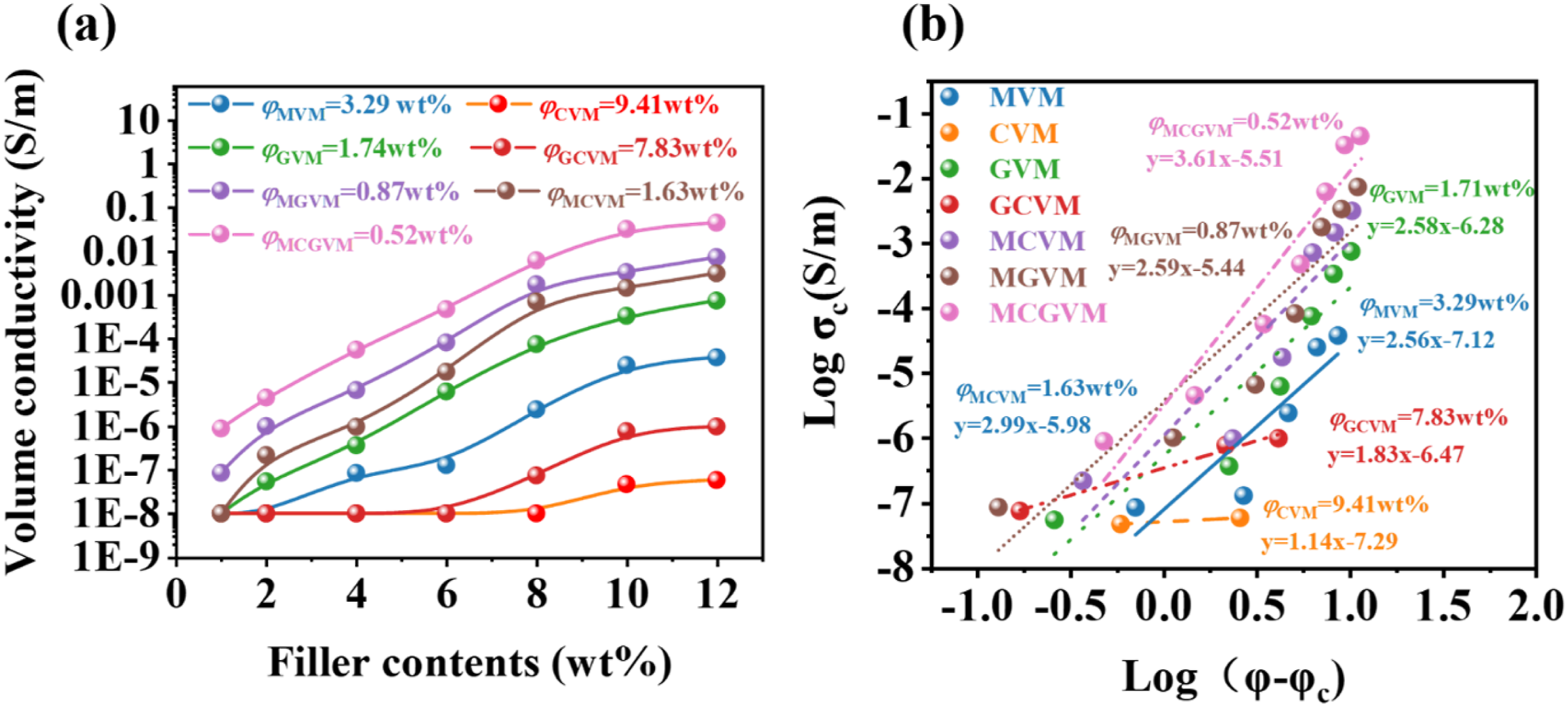


Dispersion Properties of NSR
The dispersion of conductive fillers within the rubber matrix is critical to achieving high-performance NSR. As shown in Figure S1(a)–(c) and Figure 3(a)–(d), distinct dispersion behaviors are observed for single- and multi-component filler systems. In single-filler composites, strong van der Waals interactions induce filler agglomeration, which disrupts the continuity of the conductive network, as evidenced in Figure S1(a)–(c). In dual-filler systems such as GCVM and MCVM, partial agglomeration still occurs due to mutual adsorption between fillers, resulting in localized clustering and poor interfacial compatibility (Figure 3(a) and (b)). In contrast, MGVM exhibits a pronounced spatial barrier effect, in which MWCNTs and GR hinder each other’s aggregation, thereby promoting more homogeneous dispersion (Figure 3(c)). In the ternary filler system (MCGVM), spatially interlocked fillers with different dimensional characteristics synergistically enhance interfacial continuity, forming an optimized conductive network through a topological configuration integrating point-, line-, and surface-like conductive elements (Figure 3(d)). SEM plots of NSR; (a) GCVM; (b) MCVM; (c) MGVM; (d) MCGVM.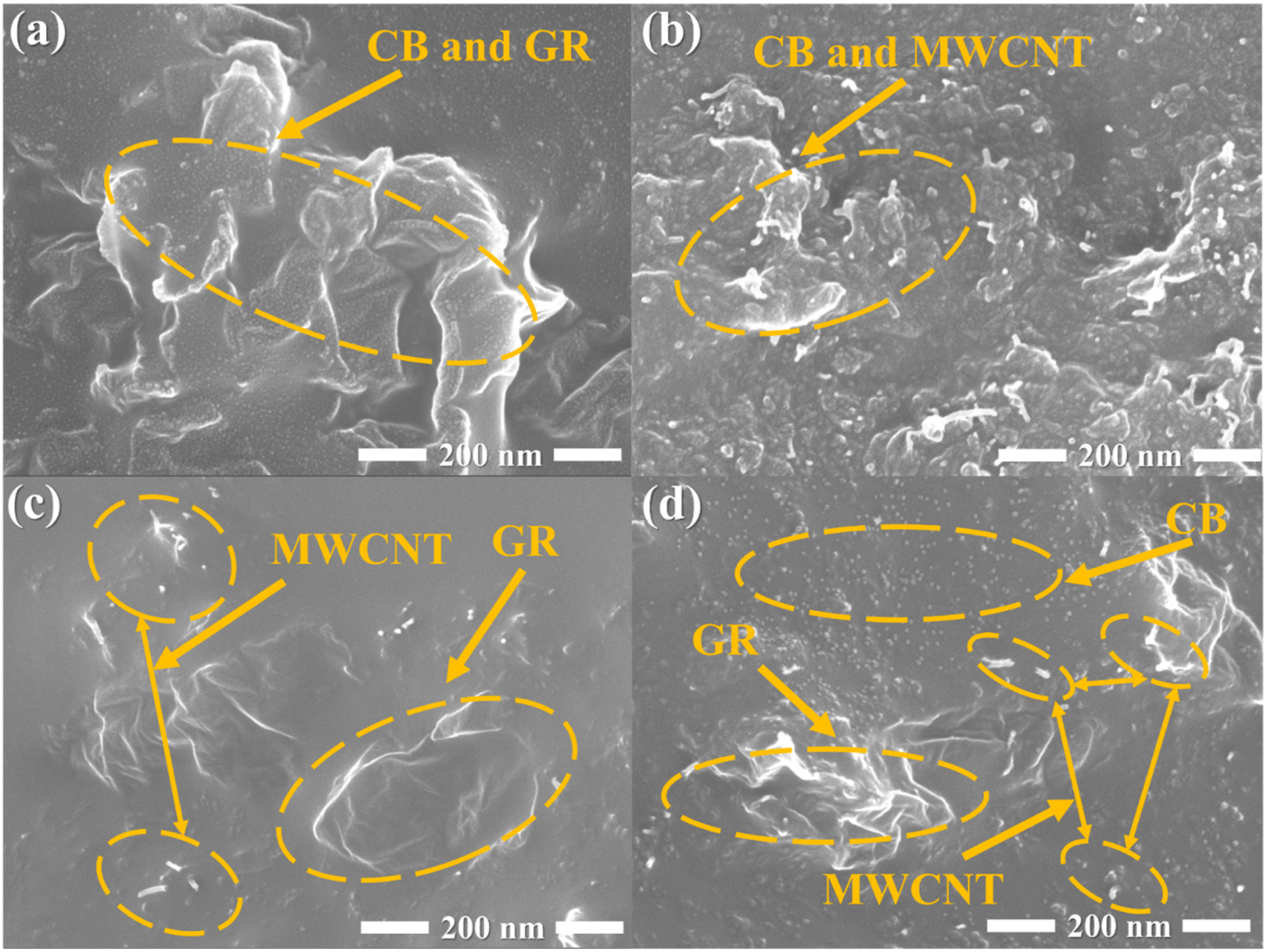
Atomic force microscopy (AFM) was used to evaluate the dispersion of the seven NSR systems. Figure S2 presents the surface roughness of rubber composites containing single- and multi-component conductive fillers. As shown in Figure S2, NSR with single-component fillers exhibit pronounced surface fluctuations, higher roughness, and significant unevenness, indicating poor dispersion resulting from filler agglomeration and limited compatibility with the rubber matrix. In contrast, multi-component filler systems display markedly improved dispersion behavior. Notably, the MCGVM sample (Figure S2(g)) exhibits the lowest surface roughness, suggesting a more uniform distribution and better integration of conductive fillers within the matrix. This smoother surface morphology enhances the continuity of the conductive network and overall filler dispersion. Detailed roughness values for each NSR system are listed in Table S1.
A rubber process analyzer (RPA) was used to evaluate the dispersion of conductive fillers in the rubber matrix. Figure 4(a)–(c) show the storage modulus (G′), loss factor (tan δ), and complex viscosity (η*) of the seven NSR systems measured at 100% strain. As shown in Figure 4(a) and (G)′ decreases with increasing strain due to the progressive breakdown of the conductive filler network, known as the Payne effect.
30
Filler dispersion was quantitatively assessed using the difference in storage modulus (ΔG′) between 9.98% and 99.98% strain,
31
defined as ΔG′ = G′9.98% - G′99.98%. A smaller ΔG′ value indicates better filler dispersion and a more stable conductive network. The ΔG′ values for MVM, CVM, GVM, GCVM, MCVM, MGVM, and MCGVM are 59.55, 52.94, 50.74, 45.35, 42.35, 38.92, and 36.25 kPa, respectively. Notably, MCGVM exhibits reductions in ΔG′ of 39.12% and 7.36% compared with GVM and MGVM, respectively, confirming the enhanced dispersion and stability of the conductive network induced by the three-carbon nanotopology. Figure 4(b) shows the Tan δ values, with MCGVM exhibiting the lowest value, indicating reduced filler aggregation and stress concentration, as well as lower energy dissipation. Figure 4(c) further shows that MCGVM also has the lowest η*, suggesting improved flow behavior and reduced internal friction during processing,
32
which further supports the superior filler dispersion in the MCGVM system. (a∼c) Shows the loss modulus, Tan δ, and complex viscosity under strain conditions for CVM, MVM, GVM, GCVM, MCVM, MGVM, and MCGVM, respectively.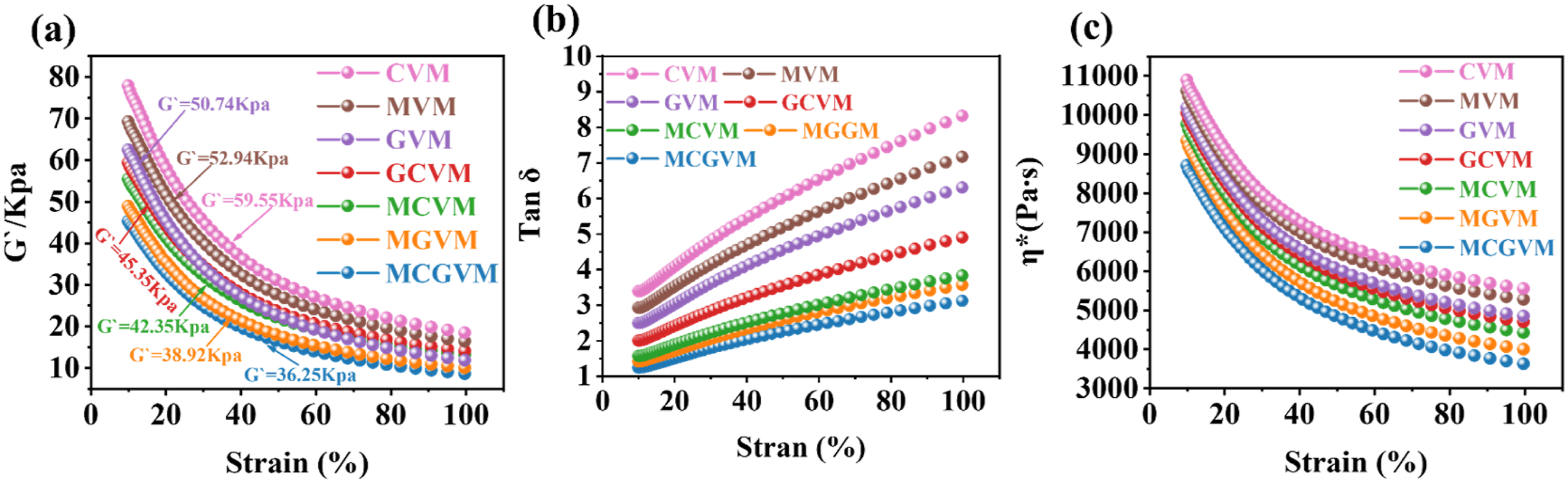
Mechanical properties of NSR
Good mechanical performance is essential for the practical application of NSR in engineering. Figure 5(a) shows the stress–strain curves of the seven NSR systems. With increasing conductive filler content, the stress–strain response becomes more linear and the slope of the curves increases, indicating enhanced stiffness. Figure 5(b) and 5(c) present the tensile strength and elongation at break, respectively. Among all samples, MCGVM exhibits the best mechanical performance, with tensile strength and elongation at break increasing by 50.26% and 33.7% compared with the optimal single-filler (CVM) and dual-filler (MGVM) systems, respectively. This improvement is attributed to the synergistic effect of the three-carbon nanotopological structure. Specifically, GR, owing to its two-dimensional lamellar structure and large specific surface area, enhances interfacial interactions with the rubber matrix, thereby increasing modulus and strength. MWCNTs, with their tubular morphology, act as crack-bridging elements, promoting more uniform stress transfer and improving toughness and elongation at break. CB nanoparticles fill microvoids, improve filler dispersion, and reduce local stress concentrations. The combined action of these fillers forms a complementary reinforcing network that enhances load transfer and minimizes defects, resulting in significantly improved mechanical performance. As shown in Figure 5(d), MCGVM also exhibits the highest Young’s modulus of 1.55 MPa, corresponding to increases of 13.97% and 5.4% compared with CVM and MGVM, respectively, confirming its superior resistance to deformation and mechanical stability. (a) Stress-strain curves of seven types of NSR; (b) Tensile strength of seven types of NSR; (c) Elongation at break of seven types of NSR; (d) Young’s modulus of seven types of NSR.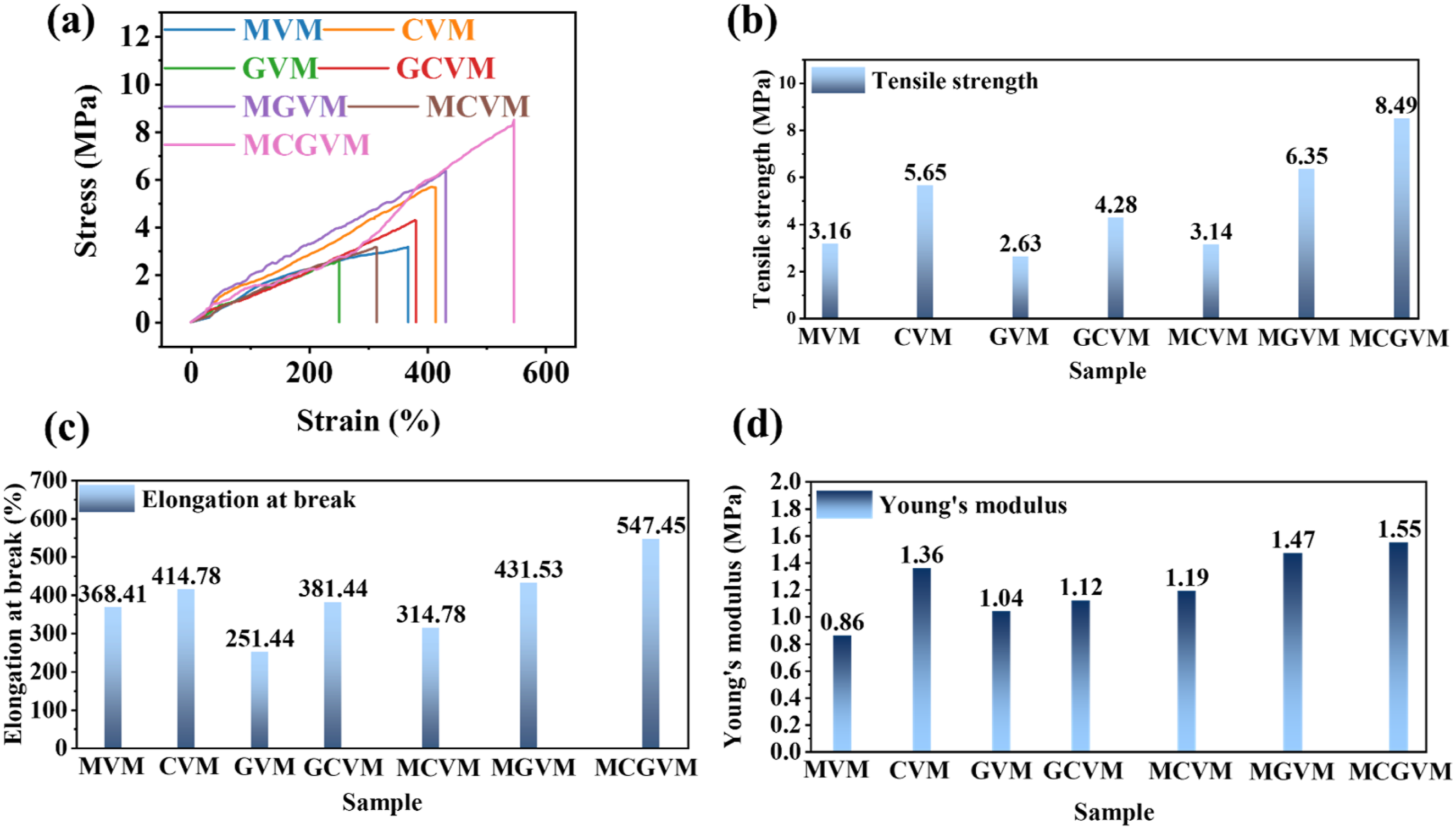
The cyclic stress–strain curves and the first loading–unloading cycles of the seven NSR systems at strains of 50%, 75%, and 100% are shown in Figures S3–S9. The hysteresis area of the stress–strain curves was quantified using
Binding energy and molecular chain movement of NSR
DMA and XPS were used to investigate the interfacial binding energy and molecular chain mobility of the NSR systems. Figure 6 presents the storage modulus, loss modulus, and loss factor (tan δ) of the seven NSR samples as a function of temperature. As shown in Figure 6(a), the storage modulus reflects the interfacial interaction between the conductive fillers and the rubber matrix, with higher values indicating stronger binding energy.
33
Among all samples, MCGVM exhibits the highest storage modulus, suggesting enhanced filler–matrix interactions and a more compact network structure, which suppresses permanent deformation and promotes elastic recovery. Figure 6(b) shows the loss modulus, which is associated with internal friction and energy dissipation within the material.
34
Stronger filler–matrix bonding restricts interfacial slippage and reduces friction, leading to a lower loss modulus. The loss moduli of CVM, MVM, GVM, GCVM, MCVM, MGVM, and MCGVM are 779.94, 733.50, 659.19, 591.16, 449.10, 417.42, and 389.97 MPa, respectively. Compared with single- and dual-filler systems, MCGVM exhibits reductions in loss modulus of 69.03% and 7.03%, respectively, indicating higher interfacial binding energy that effectively restricts molecular chain movement and reduces internal friction.
35
As shown in Figure 6(c), MCGVM displays the lowest peak tan δ value among all NSR samples, further confirming the restricted mobility of molecular chains.
36
The glass transition temperatures (Tg) are also indicated, with MCGVM exhibiting a lower initial Tg and a rightward shift of subsequent Tg values, suggesting that strong interfacial interactions constrain molecular chain relaxation at higher temperatures.
35
XPS results shown in Figures S10(a)–(h) and Figure 6(d)–(l) reveal that the C–C and Si–O peaks of MCGVM shift to higher binding energies compared with those of GVM and MGVM, from 284.95 and 285.28 eV to 285.39 eV, and from 532.43 and 532.72 eV to 532.90 eV, respectively, further confirming enhanced filler–matrix bonding in the MCGVM system. (a) Storage modulus of seven NSR; (b) Loss modulus of seven NSR; (c) Tan δ of seven NSR; (d and e) C1s and O1s spectra of GVM; (f and g) C1s and O1s spectra of MGVM; (h and l) C1s and O1s spectra of MCGVM.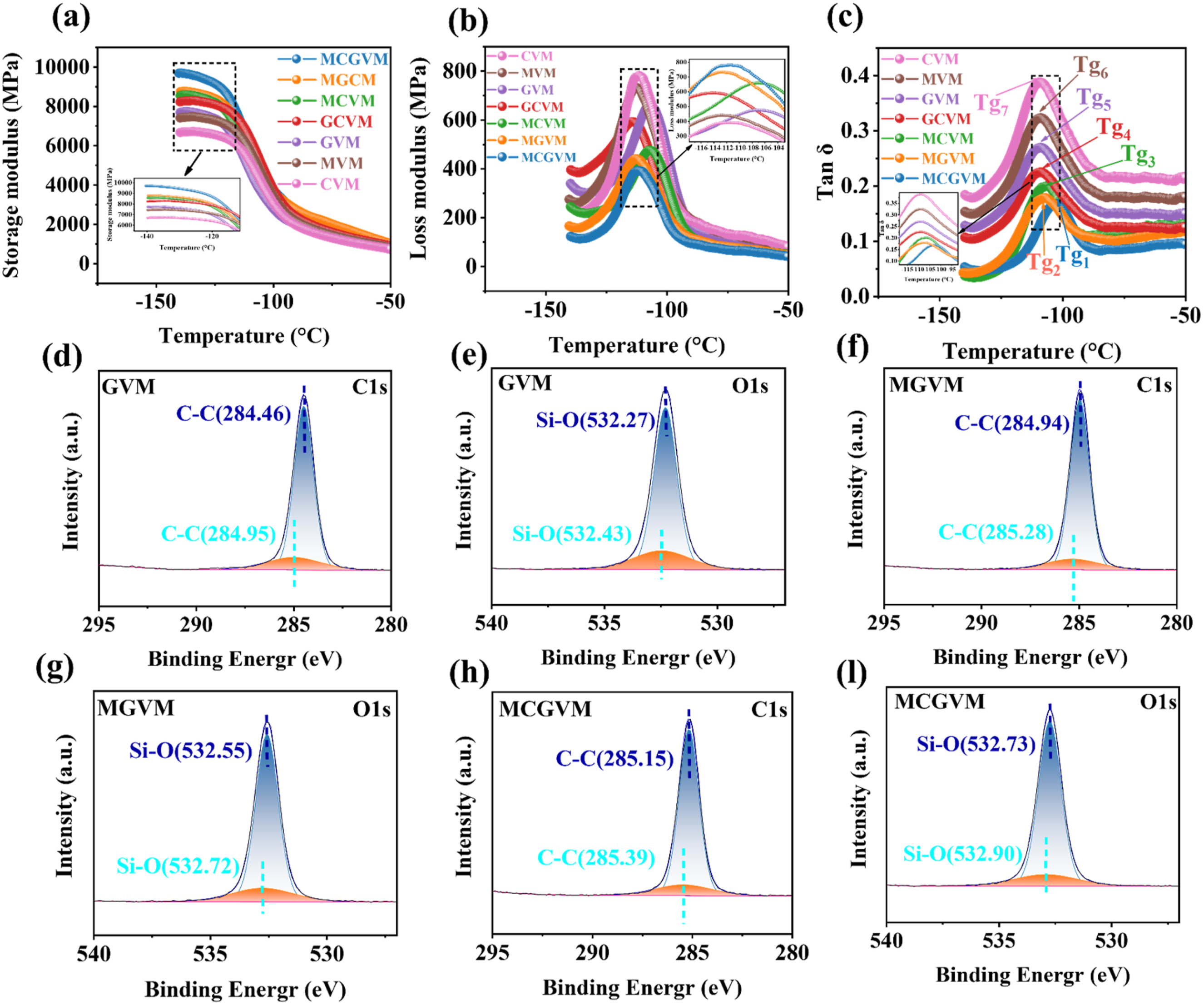
Strain sensing performance of NSR
Resistance/Strain response performance of NSR at static conditions
Figure 7(a) and (b) show the resistance–strain response curves ( (a) Static resistance/strain response performance of single-component conductive filler; (b) Static resistance/strain response performance of multi-component conductive filler; (c) Maximum monitoring range and maximum GF of seven GCVM、MCVM、MGVM、MCGVM; (d) Comparison of maximum monitoring range and maximum GF of flexible strain sensors between the present study and those of recent years.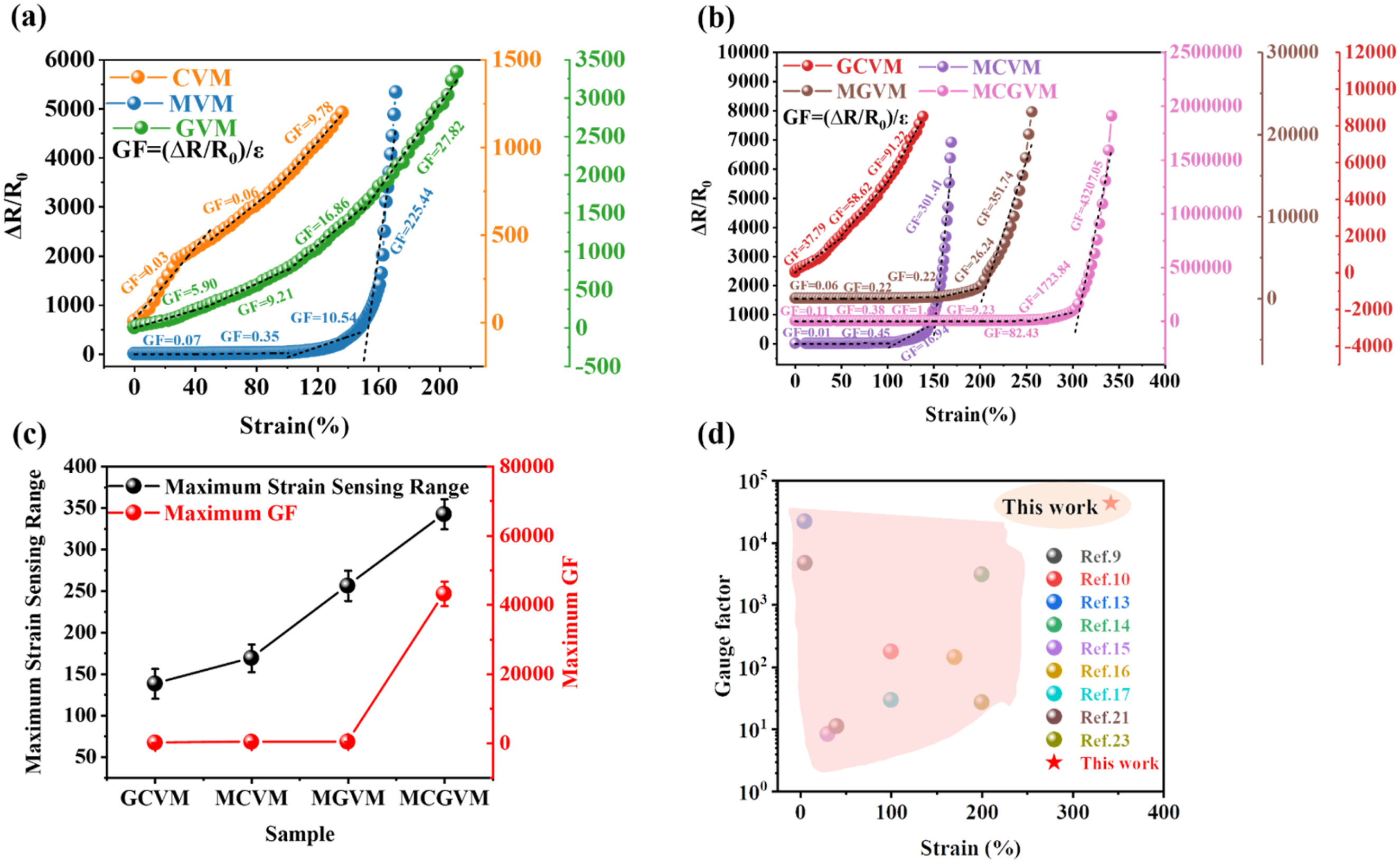
Quantitative structure–property relationship of NSR systems
To establish an explicit quantitative structure–property relationship, the key electrical and electromechanical parameters of all NSR systems are summarized in Table S1 and S2, while the dispersion quality is quantitatively characterized by AFM surface roughness parameters (Ra and Rq) listed in Table S1. A clear monotonic trend is observed as the conductive network evolves from single-filler to multi-filler topologies. Specifically, the arithmetic mean roughness Ra decreases systematically from 19.0 nm (CVM) to 4.42 nm (MCGVM), accompanied by a corresponding reduction in Rq from 25.1 nm to 5.89 nm, indicating progressively improved filler dispersion and suppressed aggregation. Concurrently, the percolation threshold φc decreases from 9.41 wt% to 0.52 wt%, demonstrating that improved dispersion together with multiscale connectivity facilitates earlier formation of conductive pathways. Meanwhile, the critical exponent t increases from 1.14 to 3.61, reflecting the transition toward a higher-dimensional, tunneling-dominated conductive network enabled by the hierarchical point–line–surface architecture. Importantly, this structural and dispersion evolution is accompanied by a dramatic enhancement in electromechanical performance, with GF_max increasing by over four orders of magnitude and the effective strain range expanding from 136% to 342.62%. These quantitative correlations between AFM-derived dispersion metrics and electromechanical performance parameters confirm that superior dispersion and hierarchical network topology jointly govern percolation behavior, strain sensitivity, and signal stability, thereby establishing a direct structure–property linkage rather than a purely descriptive comparison.
Resistance/Strain response performance under NSR dynamics
Figure 8(a)–(f) presents the dynamic resistance–strain response cycles of six NSR systems under strain amplitudes ranging from 10% to 40%. CVM, MVM, GVM, GCVM, MCVM, and MGVM all exhibit a pronounced shoulder peak effect during cyclic loading, a phenomenon commonly observed in conductive polymer–based strain sensors. The shoulder peak effect refers to an abnormal increase in resistance during the unloading stage, as shown in Figure S12. This behavior distorts the resistance–strain response, deviates from the actual mechanical deformation, and may induce irreversible resistance drift, thereby compromising signal stability and measurement accuracy. Such effects are particularly detrimental for long-term structural health monitoring of large-scale infrastructures, where shoulder peaks can obscure real damage signals and increase safety risks. Moreover, the shoulder peak effect introduces additional signal noise, reducing monitoring efficiency and diagnostic reliability. To clarify the origin of the shoulder peak effect, representative loading–unloading resistance curves were extracted from Figure 8(a)–(f) for the six NSR systems. During loading, increasing strain enlarges the distance between conductive fillers, causing progressive disruption of the conductive network and a sharp rise in resistance (segment AB). Upon unloading, partial reconstruction of the network occurs and the resistance decreases (segment BC). However, owing to the intrinsic viscoelastic hysteresis of the rubber matrix,
17
the conductive network cannot fully recover to its initial configuration, leading to a secondary increase in resistance (segment CD) and the formation of a shoulder peak, as shown in Figure 8(h)–(m). Thus, the shoulder peak effect arises from the combined influence of conductive network breakdown–reformation and matrix viscoelastic hysteresis during cyclic deformation. Mechanistically, the shoulder-peak effect can be regarded as an unloading-stage resistance overshoot caused by asynchronous recovery between the viscoelastic matrix and the conductive network. While macroscopic strain decreases during unloading, delayed chain relaxation and interfacial slippage hinder rapid re-approach of conductive fillers, leading to a transient secondary resistance increase. For the MCGVM composite, suppression of the shoulder peak originates from the synergistic coupling of enhanced network recoverability, strengthened filler–matrix interfacial constraints, and more homogeneous redistribution of local strain fields enabled by the point–line–surface topological architecture. The interlocked multiscale network promotes fast and reversible separation–reconnection of conductive pathways, while reduced interfacial sliding and viscoelastic phase lag ensure synchronized electrical and mechanical recovery, thereby eliminating unloading-stage resistance overshoot. In contrast, MCGVM exhibits no observable shoulder peak effect over the entire strain range, as shown in Figure 8(g). Its resistance–strain response remains stable and highly repeatable, indicating superior signal fidelity and excellent network recoverability. To quantitatively assess signal hysteresis, the hysteresis area ratio (a∼g) Dynamic resistance/strain response signals of CVM, MVM, GVM, GCVM, MGVM, MCVM, MCGVM at strain of 10-40%; (h∼n) Dynamic resistance/strain response signals of CVM, MVM, GVM, GCVM, MGVM, MCVM, MCGVM at 30% strain for the 10th cyclic load-unload, respectively. Dynamic resistance/strain response signals.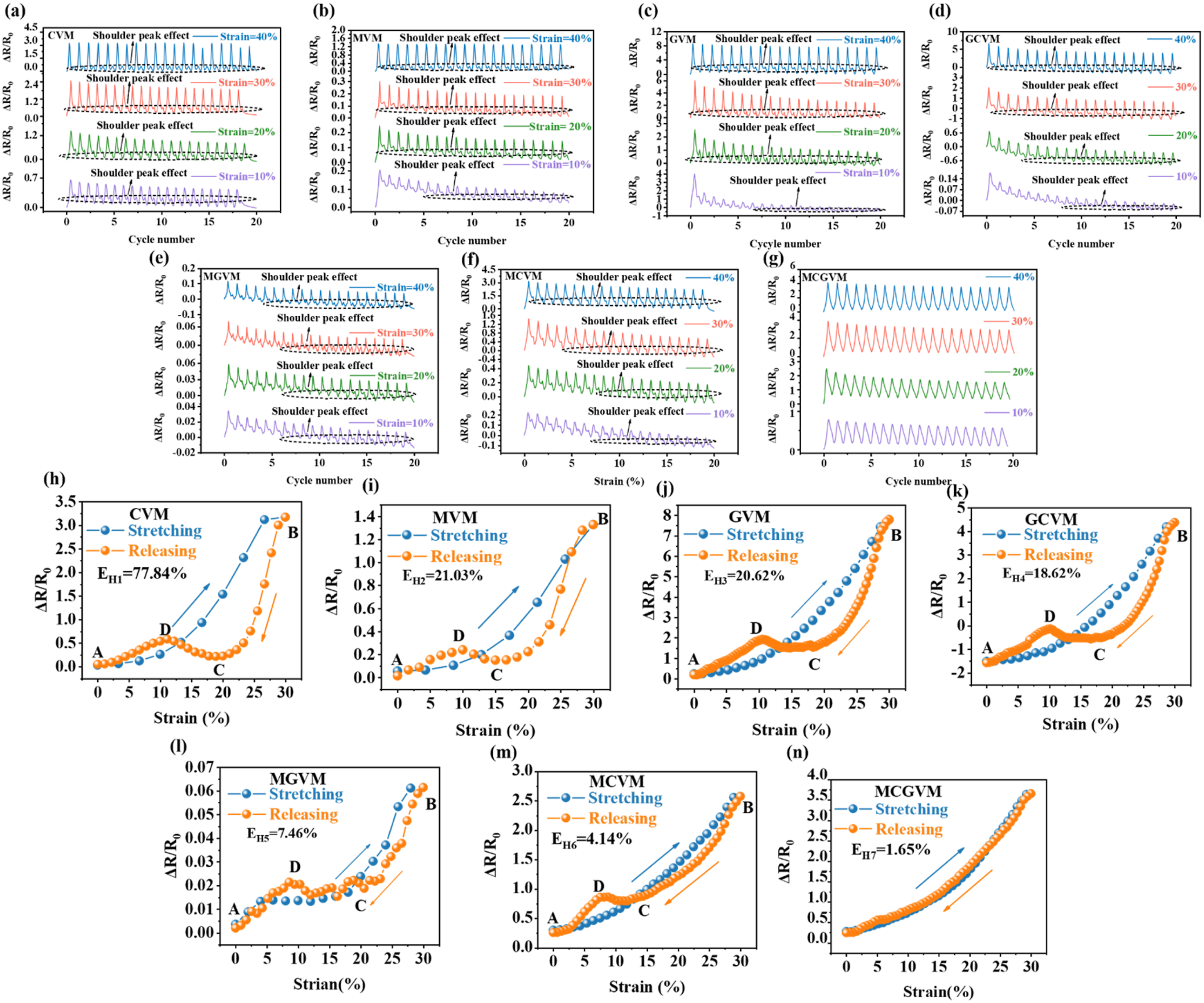
To investigate the effects of strain amplitude and loading rate on the dynamic resistance–strain response of MCGVM, Figure 9(a)–(f) presents cyclic response data collected over 1,000 cycles at strain levels ranging from 10% to 150%. The resistance–strain curves exhibit excellent cyclic stability across all strain amplitudes, with no observable resistance relaxation or shoulder peak effect, which are commonly observed in conventional conductive polymer systems. These results confirm the superior stability of the force–electric coupling behavior of MCGVM under varying deformation conditions. The influence of loading rate is further analyzed in Figure 9(j)–(o), which shows the resistance–strain responses of MCGVM at loading rates ranging from 100 to 1,000 mm·min−1. The resistance response initially decreases and then gradually stabilizes with increasing loading rate. This behavior is attributed to the viscoelastic hysteresis of the rubber matrix, where the phase lag between molecular chain relaxation and the imposed deformation rate governs the electrical response. Notably, the enlarged curves display smooth and consistent waveforms at all tested loading rates, with no evidence of shoulder peak effects. This indicates that MCGVM maintains excellent waveform integrity and resistance signal stability under dynamic loading, and that variations in loading rate have a negligible influence on the accuracy and reliability of the resistance response. (a∼i) 1000 resistance/strain response cycles of MCGVM at strain of 10-150%; (j∼o) 1000 resistance/strain response cycles of MCGVM at rate of 100-1000 mm/min−1.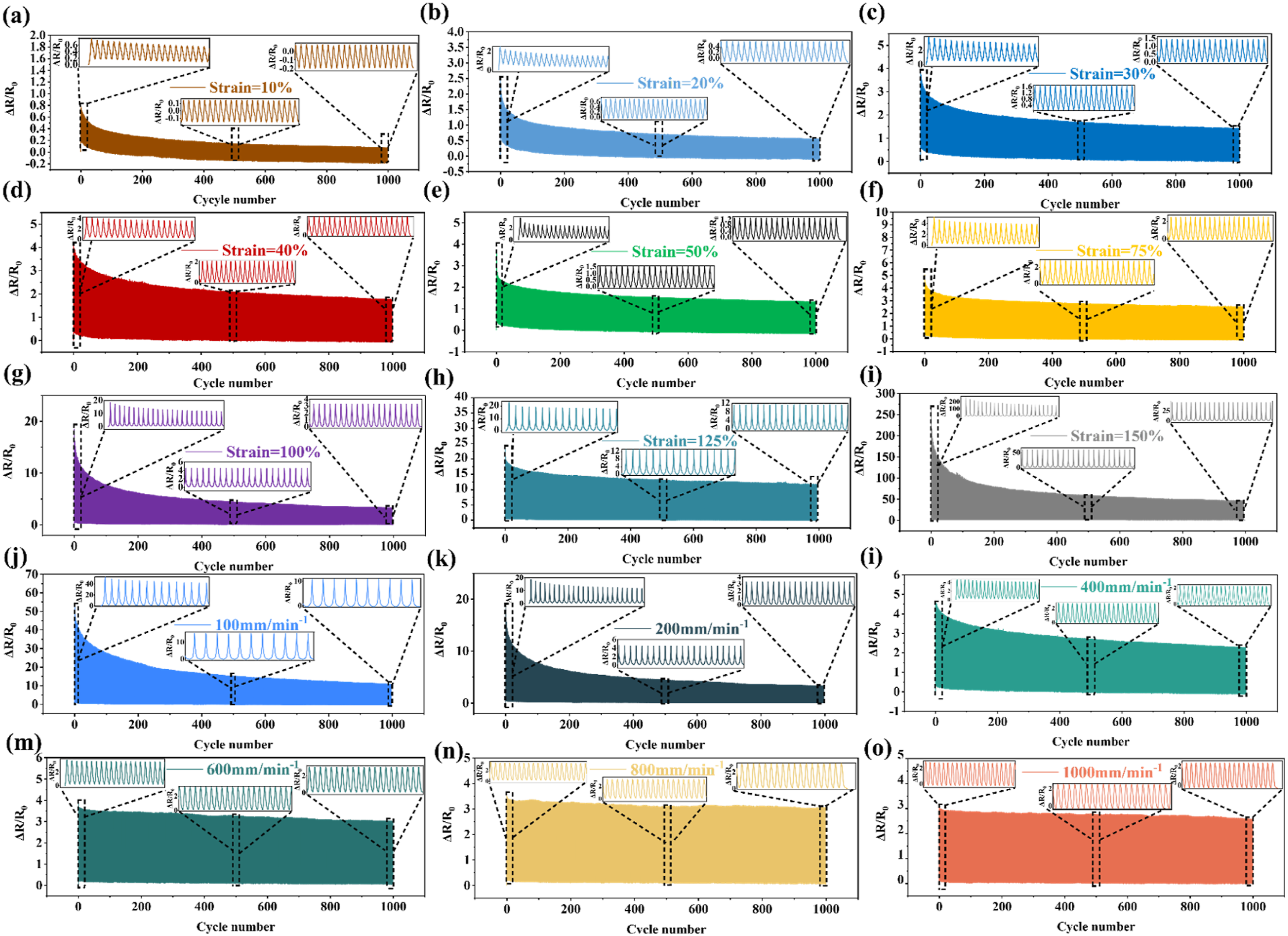
The response time of NSR is a critical parameter for high-precision flexible electronics and real-time strain sensing. Figure S13(a)–(g) show the response time of MCGVM at strain levels ranging from 10% to 100%. At lower strain levels, MCGVM responds rapidly and adapts quickly to applied deformation. As the strain increases, the viscoelastic behavior of the rubber matrix induces a delayed response due to time-dependent relaxation and recovery, which slows the reconstruction of the conductive network. As further shown in Figure S14(a)–(e), increasing the loading rate from 200 to 1,000 mm·min−1 reduces the response time from 2.87 s to 0.85 s, demonstrating faster response characteristics than many reported flexible strain sensors.37–42 This acceleration is attributed to the transition from viscoelastic-dominated to elastic-dominated deformation, in which suppressed molecular chain disentanglement enables more rapid conductive network reconfiguration. This rate-dependent behavior makes MCGVM highly suitable for fast, real-time sensing in flexible electronics, supporting early anomaly detection and predictive maintenance.
To evaluate the long-term monitoring stability of MCGVM, cyclic loading–unloading tests were conducted over 10,000 cycles at 24 h intervals using a multistage strain protocol of 50%, 100%, and 150%. As shown in Figure 10(a)–(c), MCGVM consistently exhibits stable resistance–strain response curves throughout the test, with excellent signal repeatability and no shoulder peak effect, even in the enlarged views. Compared with other flexible strain sensors, MCGVM demonstrates superior stability in cyclic resistance response signals.2,3,7–9,43–48 This long-term durability is attributed to the synergistic distribution of multiscale conductive fillers—point-like CB, line-like MWCNTs, and surface-like GR—which form a spatially interlocked three-carbon nanotopological network within the rubber matrix. This architecture ensures efficient electron transport and rapid self-recovery of conductive pathways, thereby maintaining structural integrity during repeated cyclic deformation. These results demonstrate the strong potential of MCGVM for long-term, reliable strain sensing in flexible electronics, particularly under dynamic operating conditions. (a∼c) Resistance/strain response cycles of MCGVM at different strains under intermittent loading for 24h.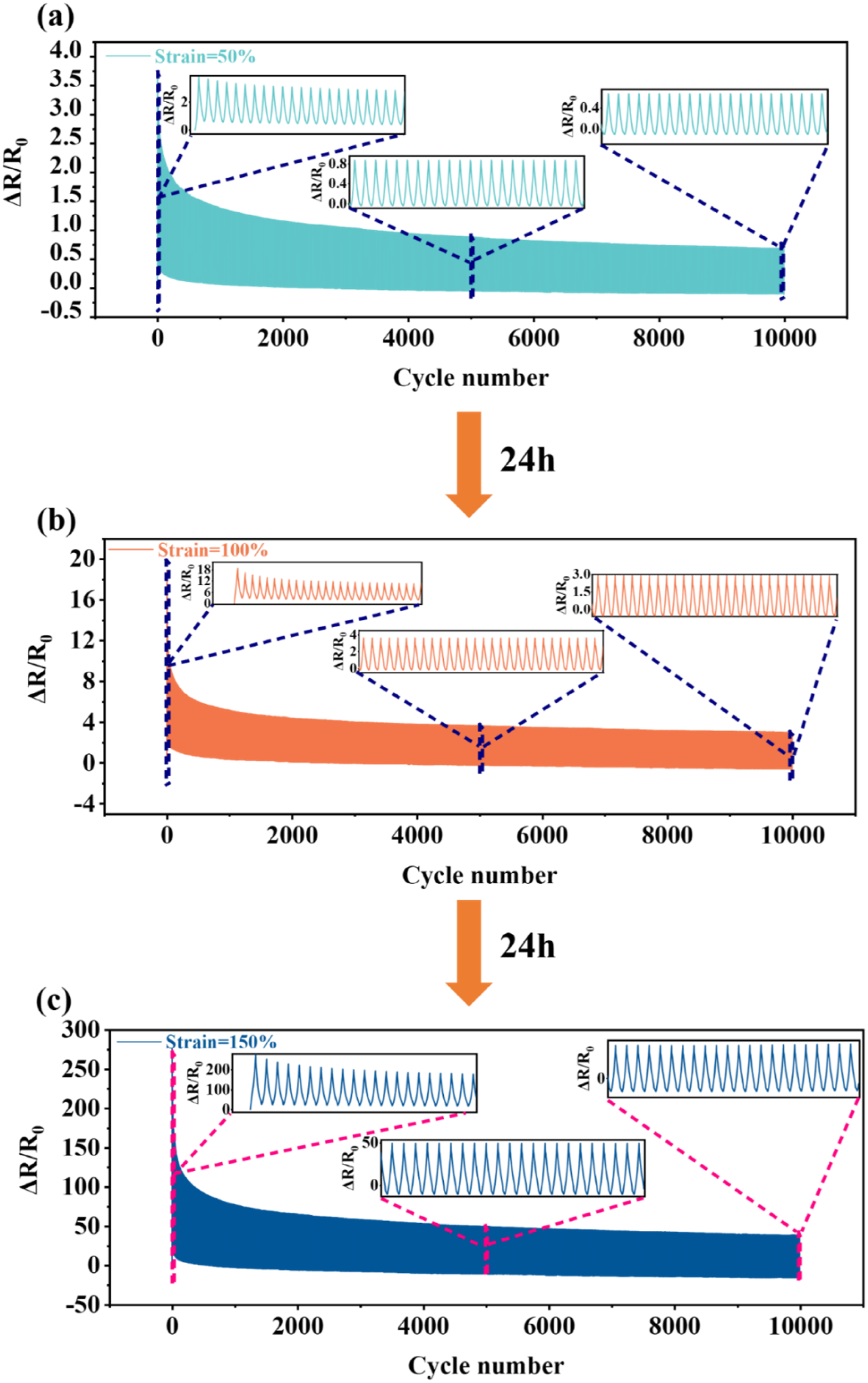
Force-electric coupling response mechanism for NSR
This study systematically elucidates and quantitatively analyzes the resistance–strain response mechanism of MCGVM. Figure 11(a) illustrates the initial dispersion state of MWCNTs, CB, and GR within the VMQ matrix. Under tensile deformation, the spacing between adjacent conductive fillers increases, leading to disruption of the conductive network and a pronounced increase in electrical resistance, as shown in Figure 11(b). Upon unloading, the elastic recovery of the VMQ matrix, together with the synergistic rearrangement of MWCNT, CB, and GR nanofillers, enables reconstruction of the conductive network and restoration of the resistance to its initial value (Figure 11(c)). As a result, the conductive network undergoes a highly reversible and synchronized evolution during cyclic deformation, giving rise to a stable resistance–strain response. It should be noted that electrical transport in conductive elastomer composites may involve both direct-contact conduction and interparticle tunneling conduction. In MCGVM, however, tunneling is expected to dominate the force–electric response over the investigated strain range. This is supported by the ultralow percolation threshold (φ
c
= 0.52 wt%), which implies abundant nanoscale gaps near the tunneling regime, as well as the extraordinarily high gauge factor and the highly reversible, shoulder-effect-free cyclic response, which are difficult to explain by contact-resistance variations alone. Therefore, the resistance evolution is primarily governed by strain-induced changes in inter-filler separation and effective connectivity, motivating a tunneling-related percolation description. To further evaluate the resistance response during the tensile stage of NSR, the Kraus model was employed49,50: (a∼c) Evolution mechanism of MCGVM conductive network during stretching; (d∼j) Resistance between experimental and theoretical results for CVM, GVM, MVM, GCVM, MCVM, MGVM, and MCGVM during stretching, respectively.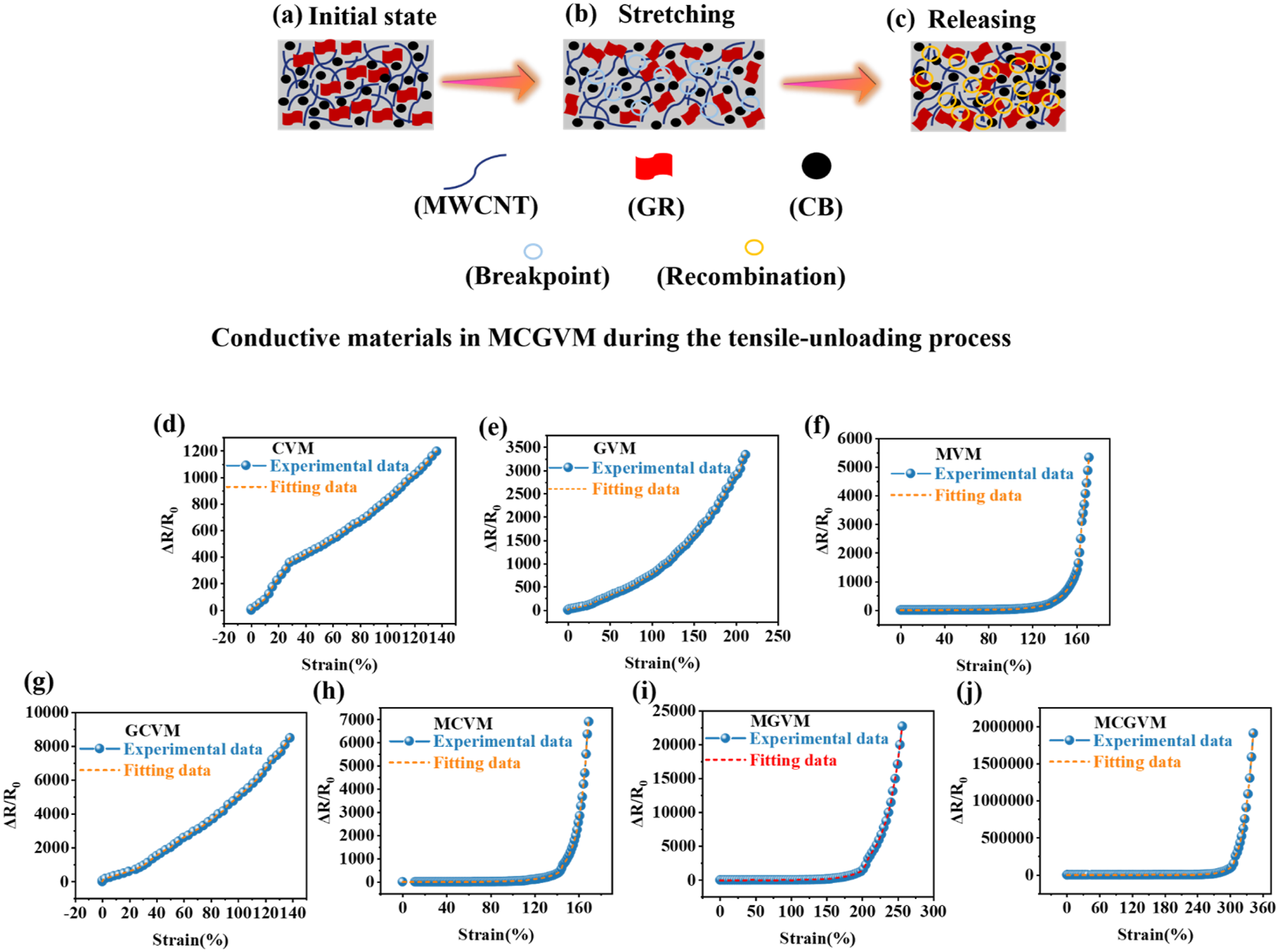



Conclusions
This study develops a three-carbon topological conductive composite (MCGVM) by integrating carbon black (CB), graphene (GR), and multi-walled carbon nanotubes (MWCNTs) into a silicone rubber (SR) matrix for force–electric coupled strain sensing. Owing to the point–line–surface synergistic architecture, MCGVM simultaneously reinforces the SR matrix (tensile strength, elongation at break, and Young’s modulus increased by 220%, 117%, and 49%, respectively) and delivers outstanding sensing performance, including an ultrawide strain range of 342.62%, an ultrahigh gauge factor (GF = 43,207.05), fast and repeatable dynamic responses, and stable, shoulder-peak-free signals over 10,000 cycles. These advantages arise from a topologically interlocked conductive network governed by tunneling-dominated transport, where strong interfacial constraints and high network recoverability suppress unloading-stage overshoot and stabilize the electromechanical trajectory. Several limitations should be noted. Environmental durability (humidity, UV exposure, and thermal aging) was not systematically assessed and may influence long-term baseline stability by altering chain mobility, interfacial interactions, and tunneling distances. In addition, although stable signals were obtained up to 10,000 cycles, the long-term evolution of drift/hysteresis and microstructural stability under prolonged cycling warrants further investigation. Moreover, scale-up feasibility, processing consistency, and performance–cost trade-offs for multicomponent fillers remain to be evaluated beyond laboratory two-roll milling. Future work will therefore focus on environmental durability testing and mitigation (e.g., encapsulation and interfacial stabilization), cycle-resolved drift/hysteresis evaluation coupled with microstructural stability assessment, and scalable manufacturing optimization with cost–performance analysis to support deployment in wearable electronics, flexible sensors, and long-term structural health monitoring.
Supplemental material
Supplemental material - Optimization of the electromechanical response properties of silicone rubber composite materials with a three-carbon topological structure
Supplemental Material for Optimization of the electromechanical response properties of silicone rubber composite materials with a three-carbon topological structure by Bangwei Wan, Yong Yuan, Yang Yang, Rongxin Guo, Xiaotao Yu, Yong Yan in Journal of Thermoplastic Composite Materials.
Footnotes
Author contribution
Bangwei Wan: Conceptualization, Methodology, Software, Investigation, Writing-original Draft. Yang Yang、Rongxin Guo、Yong Yuan: Software, Visualization. Yang Yang、Rongxin Guo、Yong Yuan: Validation. Bangwei Wan、Yang Yang: Writing-review & editing, Methodology. Yong Yan, Xiaotao Yu: Supervision. Yang Yang: Project administration.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant No. 52368043). Yunnan Fundamental Research Projects (Grant No. 202401BG070069).
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Supplemental material
Supplemental material for this article is available online.