
Abstract
The soft actuators of smart materials have attracted significant attention in recent years due to their unique functions and distinctive characteristics. The actuators are composed of smart materials that can demonstrate substantial alterations in their dimensions, shape, or mechanical characteristics when subjected to external stimuli, including but not limited to temperature, light, electricity, or magnetic fields. These aforementioned characteristics render them highly advantageous for various applications, including tissue engineering, prosthetics, surgical robots, drug delivery, and soft robotics. A deeper understanding of the principles of the actuators is crucial for their development and application expansion. This article provides a comprehensive analysis of soft actuators made from smart materials, explaining their underlying concepts, operational mechanisms, material composition, production techniques, and the diverse range of applications across various fields, including tissue engineering, prosthetics, surgical robotics, drug delivery systems, and the emerging field of soft robotics. This review further highlights the current challenges and prospects to address these problems to enable their ability to revolutionize into a variety of different technical fields.
Introduction
Smart materials are substances that have the ability to respond to changes in their environment or to an applied stimulus by altering their properties or behavior.1–3 These materials are designed to exhibit specific, often complex, responses to external factors such as temperature, pressure, electrical or magnetic fields, humidity, light, or chemical compounds. 4 Examples of smart materials include shape-memory alloys, piezoelectric materials, electroactive polymers, magnetorheological fluids, and thermochromic materials. These materials have the potential to be used in a wide range of applications, such as actuators, sensors, energy harvesting devices, and medical implants, due to their unique and often multi-functional properties.5,6 Smart materials-based soft actuators are gaining interest due to their exceptional capabilities and applications. These actuators can achieve large deformations, shape changes, and mechanical responses to external stimuli such as temperature, light, electricity, and magnetic fields.7–10 Ideal for soft robotics, biomedical devices, and adaptive structures, they mimic natural movements and exhibit complex behaviors.
These materials date back to the discovery of piezoelectricity in the 19th century. In 1880, Pierre Curie and Jacques Curie observed that certain crystals, such as quartz and Rochelle salt, could generate an electric charge when subjected to mechanical stress. 11 This phenomenon, known as the piezoelectric effect, laid the foundation for the development of piezoelectric materials as actuators and sensors. 12 However, the evolution of piezoelectricity has been characterized by continuous research and innovation, leading to the development of advanced piezoelectric materials with enhanced performance and diverse applications. This progression reflects the dynamic nature of scientific and technological development, where early fundamental discoveries serve as the springboard for subsequent breakthroughs and the emergence of new frontiers in material science and engineering.
In the mid-20th century, researchers began exploring electrorheological (ER) and magnetorheological (MR) fluids. ER fluids, which change their rheological properties in response to an electric field, were first discovered in the 1940s. 13 MR fluids, which exhibit changes in viscosity under a magnetic field, were identified in the 1940s as well. 14 These fluid-based smart materials showed promise in damping and vibration control applications. Around the 1970s, electroactive polymers (EAPs) gained attention as soft actuators. EAPs are a class of smart materials that can change their shape or size in response to an electrical ionic stimulus. One type of EAP, known as ionic polymer-metal composites (IPMCs), was introduced in the late 1980s by Yoseph Bar-Cohen and colleagues. IPMCs are characterized by their ionic polymer structure with metal electrodes, offering lightweight and flexible actuation capabilities. 15 Dielectric elastomers, another type of EAP, emerged as soft actuators in the 1990s. They are composed of compliant elastomeric materials sandwiched between compliant electrodes. Dielectric elastomers can undergo significant deformation under an electric field and have been studied for applications in robotics, soft grippers, and haptic interfaces. 16
Consequently, researchers showed massive interest in liquid metal-based soft actuators in the early 2000s. Gallium-based liquid metal alloys, such as eutectic gallium-indium (EGaIn), were found to exhibit remarkable deformability and shape-changing capabilities when subjected to electrical currents. 17 These liquid metal soft actuators have the potential for use in flexible electronics, reconfigurable devices, and soft robotics. Shape memory materials are a class of smart materials that can “remember” their original shape and return to it upon heating (shape memory effect) or undergo significant deformation upon cooling (superelasticity). 18 SMA, an active material that can be manufactured into plates, wires, springs, and ribbons has been extensively used in various applications, including biomedical devices, robotics, and aerospace.19–22 However, they have limitations such as strain range, slow response time and actuation speed, and high fabrication cost. 23
Recent advancements in material science, nanotechnology, and additive manufacturing have further accelerated the development of smart materials and soft actuators. Researchers have explored novel materials, such as carbon nanotubes (CNTs), graphene, and biomimetic materials, to enhance the extraordinary functional properties of soft actuators. Additionally, the integration of smart materials with advanced control systems, such as artificial intelligence and machine learning algorithms, has led to more sophisticated and adaptive actuation technologies. For example, over several decades, robots were predominantly constructed using inflexible elements such as gears and links. The joints were equipped with actuators, such as motors, encoders, and sensors. 24 Through the implementation of a programmed system to regulate motor movement, robots can achieve diverse forms of locomotion. 25 The recent advancement in the study of intelligent materials has paved the way for a novel avenue in the exploration and innovation of soft robotics. 26 In contrast to rigid materials like steel, smart materials possess the capability to be stimulated and react to various external factors, including but not limited to electricity, heat, magnetism, and light.7–10 The bodies are capable of undergoing deformation to produce various types of motion, including bending, elongation, and torsion.27–29 These capabilities render them suitable as actuators for accomplishing various forms of locomotion.
The development of these actuators and the need to advance the technology and expand their range of applications require a deeper understanding of their underlying principles. Our review distinguishes itself by offering a comprehensive exploration of recent advancements, emerging trends, and prospects. Unlike conventional reviews that offer superficial insights, our analysis delves intensely into the intricate mechanisms, innovative materials, advanced fabrication techniques, and diverse applications shaping the field. We provide readers with a nuanced understanding of both the opportunities and challenges inherent in these technologies, guiding future research endeavors toward informed decision-making and transformative innovations. Moreover, we emphasize the integration of intelligent control systems, enabling precise and dynamic actuation in response to various stimuli, thereby enhancing performance and flexibility across applications. Our exploration of nature-inspired designs further underscores the potential for novel soft actuators that mimic the mobility and flexibility of living organisms, offering new avenues for exploration and innovation. Looking ahead, our review identifies ongoing areas of growth and development in the field, highlighting the versatility and adaptability of these technologies. By synthesizing recent literature and providing insightful analysis, our article contributes to advancing the discourse on smart materials soft actuators, paving the way for transformative innovations across various sectors. Figure 1 presents the overview of the paper’s content. General overview of the paper.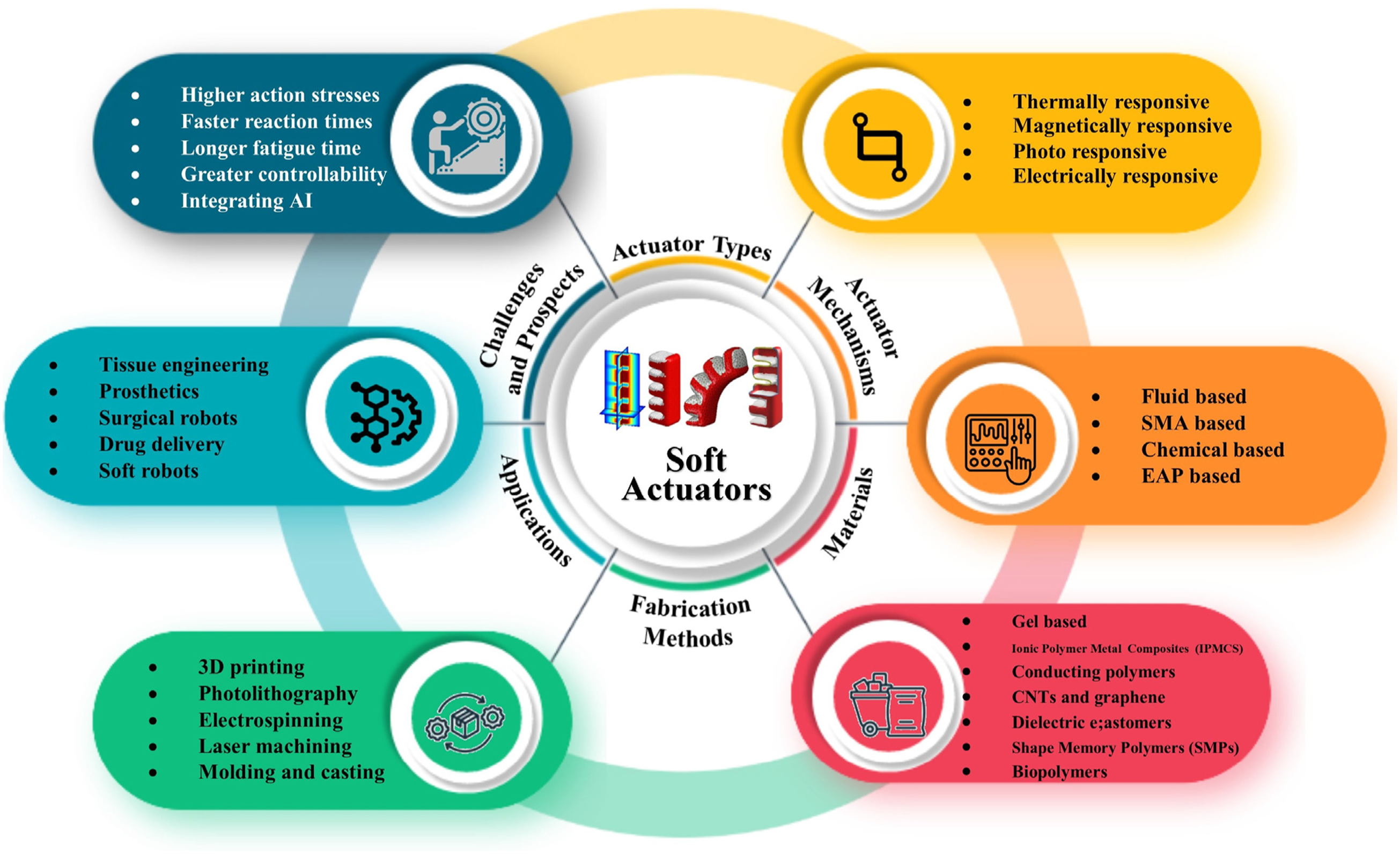
Methodology-revision of published literature
As illustrated in Figure 2, utilizing the Web of Science (WoS) database revealed published manuscripts on smart material. 33,352 published documents on smart material have been issued since 2000. There have been 28,118 new releases in the previous 10 years. Out of this, 84.3% were published over the last 10 years. Since the year 2000, 59,089 manuscripts have been added to the following databases: WoS, Chinese Science Citation Database℠ (CSCD), Derwent Innovations Index (DII), KCI-Korean Journal Database (KCI-KJD), and SciELO Citation Index. Of these, 49,794 were published over the past 10 years, accounting for 84.3% of the literature on the subject. These demonstrate a severe interest in smart material and have facilitated advancements in recent years. The number of publications on smart materials (All databases Retrieved on June 7, 2023; https://webofscience.clarivate.cn/wos/alldb/summary/9ccd2ed1-2f06-4e63-899c-049c8134da5a-d4e8096e/relevance/1), and Web of Science Database (Retrieved on June 7, 2023; https://webofscience.clarivate.cn/wos/woscc/summary/d96de8c5-7e1e-4dee-8acf-f8b5a783477e-d4e8ee73/relevance/1).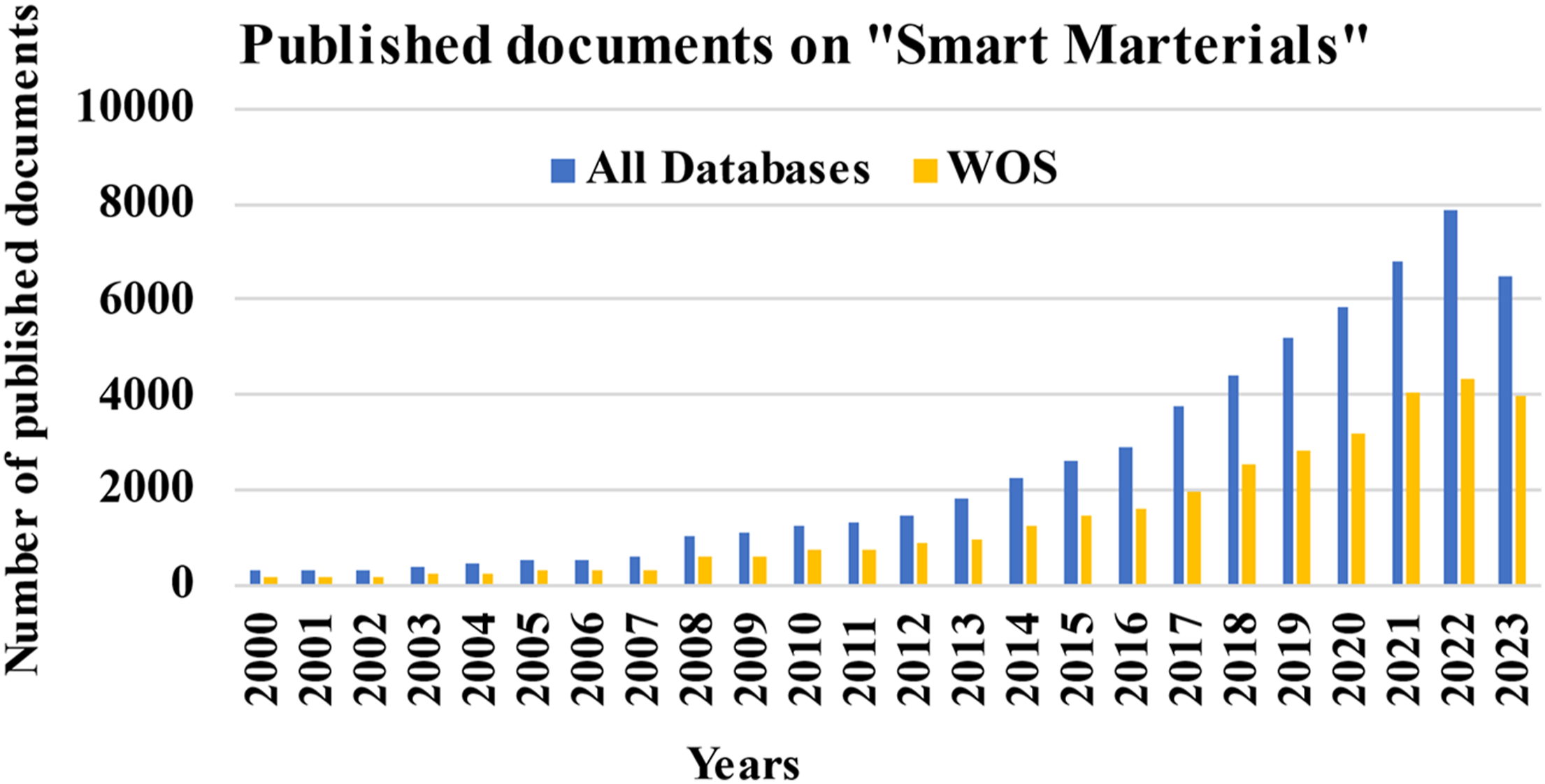
Similarly, the Web of Science (WoS) database displayed published publications on soft actuators, as seen in Figure 3. Since the year 2000, a total of 9840 published documents relating to smart actuators have been recorded. A total of 8870 publications have been released throughout the last decade. A significant majority of the papers, specifically 90.1%, have been made available during the past decade. From the year 2000 onwards, a cumulative count of 11,942 scholarly publications has been recorded and cataloged across many databases, including WoS, Chinese Science Citation Database℠ (CSCD), Derwent Innovations Index (DII), KCI-Korean Journal Database (KCI-KJD), and SciELO Citation Index. A total of 10,651 papers have been published over the past decade, representing about 89.2% of the overall body of research. The data presented indicates a notable increase in scholarly investigation about the aforementioned subject matter. These findings exhibit a significant interest in soft actuators. The growth highlights the importance of harnessing soft actuators' capabilities to address various challenges and develop innovative solutions in various fields. The number of publications on soft actuators (All databases Retrieved on June 7, 2023; https://webofscience.clarivate.cn/wos/alldb/summary/59bb56fa-d4ff-443f-8ae8-04f792cf1a17-d4f0326c/relevance/1) and Web of Science Database (Retrieved on June 7, 2023; https://webofscience.clarivate.cn/wos/woscc/summary/55c90cbe-6faa-4862-855e-c10f343279c9-d4f10ec8/relevance/1).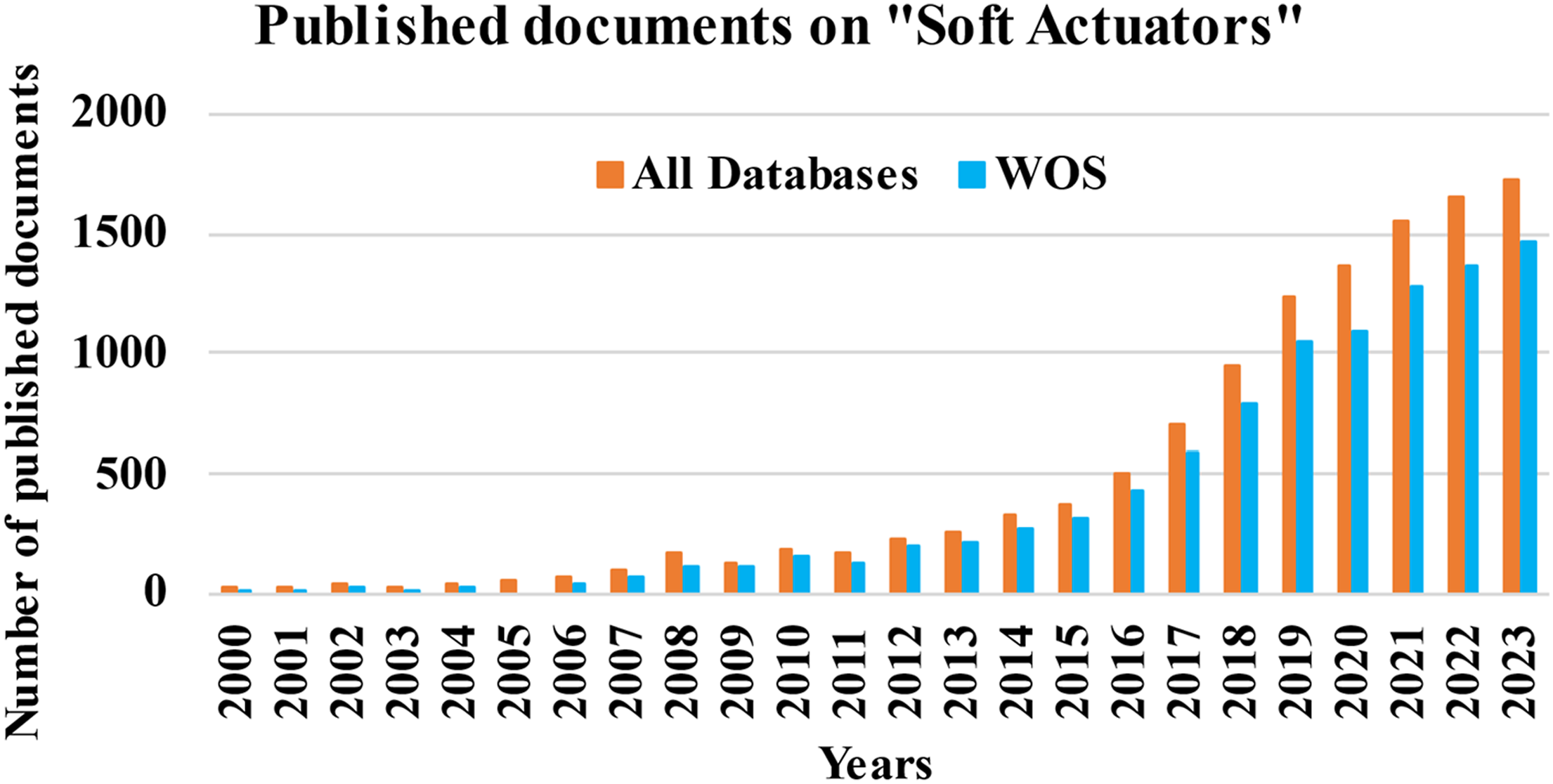
Soft actuators mechanisms and actuator types
Smart materials-based soft actuators use a variety of actuation methods, including expansion and contraction, bending, twisting, and other complicated deformations. These mechanisms allow soft actuators to execute a wide range of movements and functions, making them suitable for a variety of applications across industries. Understanding these actuation processes is critical for researchers and engineers when designing and optimizing smart materials-based soft actuators that fulfill particular performance and application criteria. Smart materials-based soft actuators are classified into several categories, each with a distinct design, characteristics, and actuation processes. These actuators include dielectric elastomer actuators (DEAs), electroactive polymers (EAPs), ionic polymer-metal composites (IPMCs), and shape memory alloys (SMAs), among others. Each type of actuator is intended to respond to certain inputs by producing regulated movements and forces. Understanding the properties and capabilities of various actuator types is critical for selecting the best soft actuator for a specific application while attaining peak performance and functionality.
Actuators mechanisms
Fluid-based mechanism
Fluid actuators are the widely utilized mechanisms that transform pressurized fluid energy into mechanical energy. These actuators provide several advantages, including convenience, control, high output power, and straightforward automation. According to Hines et al. (2017), there exist three distinct types of systems, namely pneumatic, hydraulic, and pneumatic-hydraulic. 30
The hydraulic actuation mechanism employs fluid dynamics and the principle of incompressibility to generate mechanical force by use of electric currents. Despite its considerable promise, the complete development of the technology has been impeded by limits in terms of volume and weight. The hydraulic robotic arm developed by Cianchetti et al. (2021) as illustrated in Figure 4(a), drew inspiration from the biomechanics of an octopus, effectively replicating its ability to elongate, shorten, bend, and stretch.
31
As shown in Figure 4(b), the stretching properties of the arm resulted in a 60% increase in length and a 20% decrease in diameter. Ueno and colleagues developed a hydraulic robot that utilizes electrically conjugated fluid for its actuator design.
32
The robotic device, with a mass of 1.9 g, possesses a substantial electrical potential and exhibits an average power usage of 77.5 milliwatt seconds, enabling it to execute tilting and expanding movements at a migration velocity of 5.2 mm per second. (a) A grasping example can be performed using a mock-up created by activating only one longitudinal cable.
31
Reproduced with permission, license number: 5747370652932. (b) Tests show that using all cables elongates the structure from 100 mm to 160 mm, with the pulling force and direction indicated by white arrows.
31
Reproduced with permission, license number: 5747370652932. (c) Inchworm robot locomotion mechanism. The inchworm robot uses a pressurized bending mechanism, causing its back leg to slide forward, and a release of pressure, causing its front leg to slide forward.
38
Reproduced under Creative Commons Attribution License. (d) Captured during a full cycle of the inchworm soft robot’s locomotion. The robot, initially flat, was bent, up and down by controlling air pressure, and moved to the left by 2 mm within 0.4 s, with tick labels in inches.
38
Reproduced under Creative Commons Attribution License (e) The principles of locomotion of the fabricated wireless microrobot, include its initial state, retraction state, elongation state, and retraction state.
84
Reproduced with permission, license number: 5752201268693.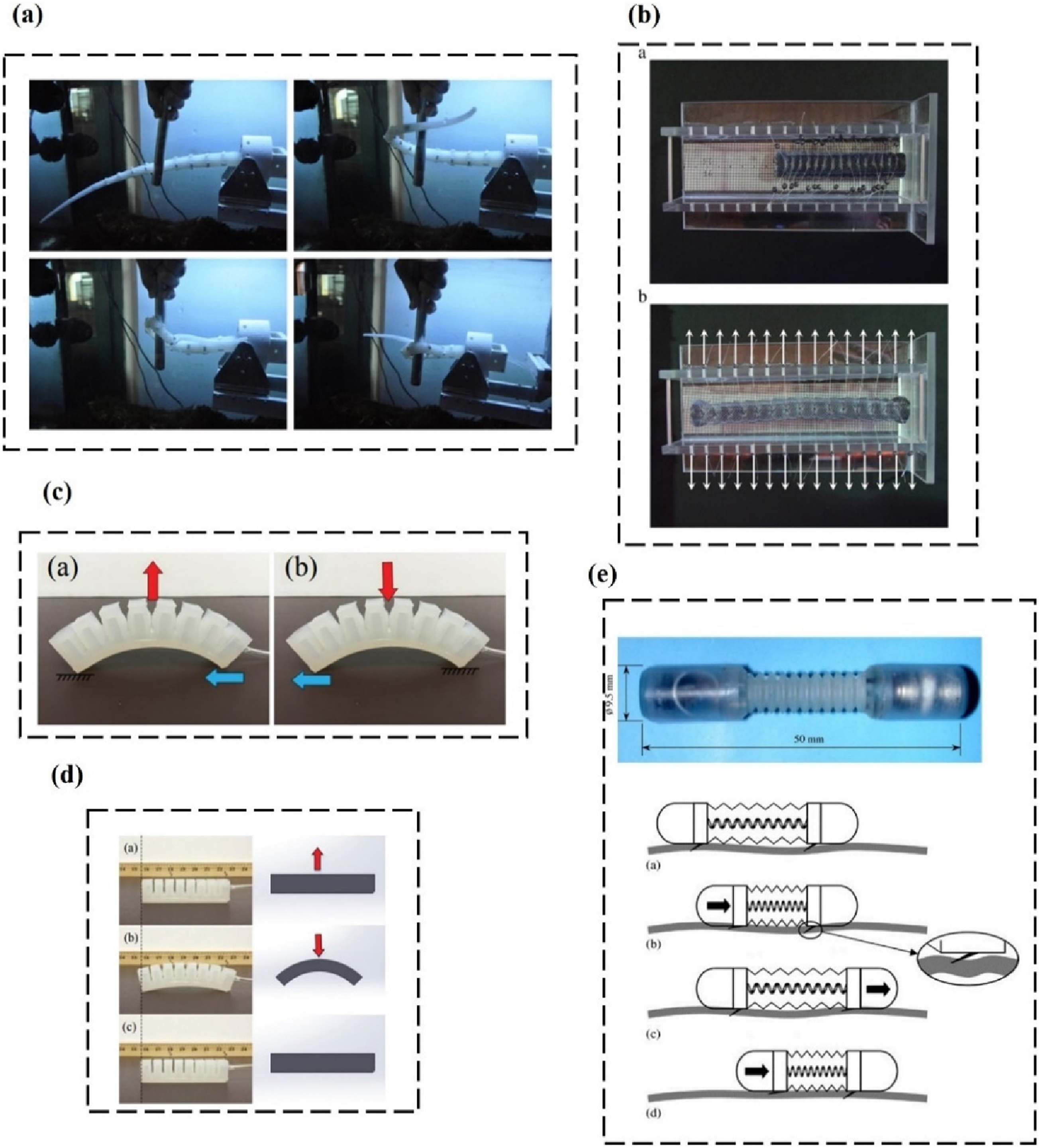
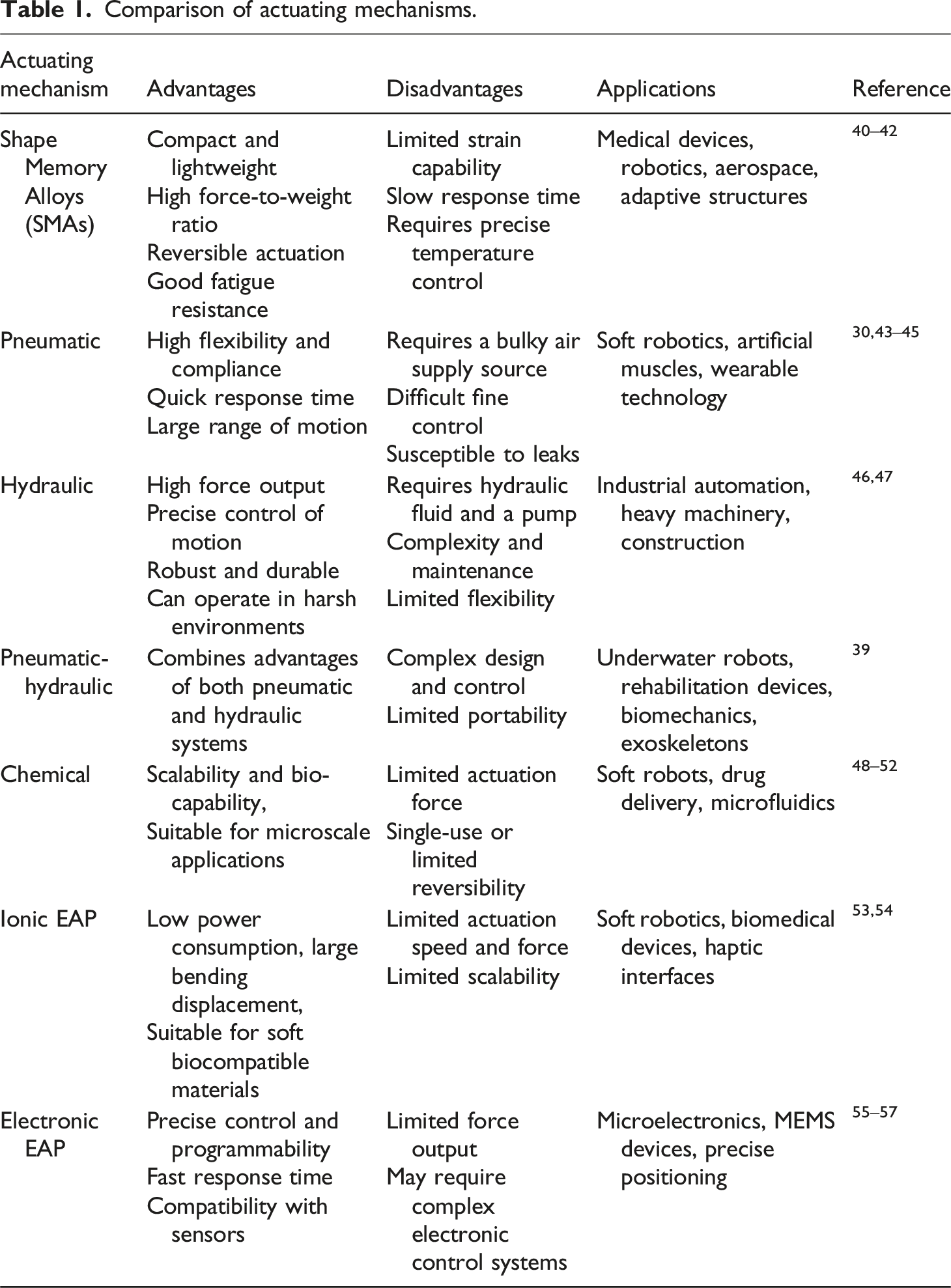
According to Xu et al. (2020) and Belforte et al. (2014), a pneumatic mechanism is an efficient and adaptable apparatus that utilizes compressed air to generate traction.33,34 This mechanism demonstrates rapid response speed, ensures safety, and offers flexibility by directing pressurized gases into channels and cavities, resulting in structural deformation. In a study, Hawkes et al. (2017) and Nakajima et al. (2020) employed the elongation features of pneumatic actuators to replicate biological navigation and the movement of octopus tentacles.35,36 Terryn et al. (2017) employed Diels-Alder polymers as a means of facilitating self-healing properties in soft manipulators, grippers, and synthetic musculature. 37 When subjected to pressures below 25 kPa, the actuators were capable of generating gripping forces ranging from 0.25 to 0.32 N. Additionally, the dynamic adaptation reaction of these actuators facilitated the automatic healing of injured hands. Ning et al. (2017) developed a pneumatic mechanism robot that emulates the locomotion of worms, specifically employing a Ω-shaped crawling motion as depicted in Figure 4(c). 38 As shown in Figure 4(d), the robot, composed of eight sawtooth air chambers, employed a pneumatic system to expand and curve when filled with air, achieving a maximum displacement of 2 mm and an average velocity of 2.2 mm/s. The research conducted by Godaba et al. (2016) illustrated that underwater robots predominantly employed a pneumatic-hydraulic actuation system that integrates the manipulation of internal and external air pressures to facilitate the absorption or discharge of water. 39
Comparison of actuating mechanisms.
Electroactive polymers-based actuation
Electroactive polymers (EAPs) possess the unique ability to alter their dimensions and configurations in response to electrical stimulation. 58 This phenomenon enables the conversion of stored elastic potential energy into mechanical energy, hence facilitating an effective actuation mechanism. According to Gupta et al. (2019) and Duduta et al. (2019), this technology presents several benefits, including significant deformability, a high energy density, and a structure that is both lightweight and compact.59,60 The field of EAP encompasses many actuation mechanisms, including polarization, molecular phase transition, and mass/ion transport. Polarization is induced by the utilization of dielectric elastomers and piezoelectric polymers, while molecular phase transition is facilitated by shape memory polymers and liquid crystal elastomers. Additionally, the transfer of mass and ions is facilitated by particular materials such as gels and conducting polymers. EAPs can be classified into two main categories, namely field-activated and ionic, as reported by.61,62 The field-activated category encompasses various materials such as dielectric elastomers, liquid crystal elastomers, electrostrictive polymers, polymer electrets, and ferroelectric polymers. On the other hand, the ionic category comprises ionic polymer-metal composites, ionic gels, carbon nanotubes, and conducting polymers, as identified by.63,64
Ebrahimi et al. 58 introduced a rapid-reacting flexible composite actuator composed of silicone elastomer and ethanol. Their actuator replicated natural movements by utilizing joule heating, resulting in enhanced temperature response, chemical composition, mechanical characteristics, force generation, and microstructure. In addition, the actuator is automatable, and recyclable, rendering it appropriate for a wide range of robotic applications. In active optical components, Price et al. 65 presented a piston-tilt mirror apparatus, which utilized low-voltage electroactive polymer actuators to change the position of a plane mirror. In their study, the methodologies used for designing, synthesizing polymers, and fabricating actuators were presented. The findings indicated a positive outlook for devices utilizing electroactive polymers in adaptive optical systems, which could result in the development of more advanced telescopes and enhanced diagnosis of retinal tissue. In another study, a novel composite material, consisting of electrically stimulated polymers and metals which enabled the production of compact, lightweight, and flexible actuators, was developed for an active catheter system by Sewa et al. 66 Their catheter was capable of bending at a 90-degree angle when a pulse voltage of 3 V was applied, with its movement being controlled by an electronic signal. In addition, the prototype demonstrated excellent performance in animal trials and is well-suited for interventional radiology surgery. Despite the IMPC advantages, some challenges need attention such as sufficiently preparing non-metallic flexible IPMC electrode materials is crucial to reduce production costs and improve service life, high-performance air-operating IPMCs are needed to ensure stable driving performance and long-lasting operation in air, while ionic liquid-based alternatives offer better response speed and displacement performance. 67
The ionic gel is classified as a reticular polymer that can undergo expansion in aqueous environments, with its behavior being influenced by factors such as pH and electric field. The alteration of shape and volume of ionic gels, enabling them to function as actuators, is facilitated by the interaction between the polymer and water. 68 Owing to the extraordinary features of ionic electroactive polymer actuators lightweight, flexible, and low-energy consumption, Wang et al. 69 developed a new ionic electroactive polymer actuator based on ionogel, which operated at low voltage with high electrochemical stability. A model is built to characterize its electrical, mechanical, and chemical properties, explaining the relationship between input voltage and bending displacement. Also, their model’s geometric scalability supported the design of the soft mechanism.
The IPMC material consists of a fluoropolymer ion exchange membrane that is positioned between two conductive layers made of precious metals. 70 The primary attributes of this material encompass a low activation voltage and a substantial bending strain resulting from the migration of cations inside the polymer matrix. According to Jo et al. (2013) and ul Haq et al. (2016), IPMC demonstrates robust performance across a range of sensing and actuating applications.71,72 It presents several notable advantages, including but not limited to low driving voltage, rapid response, substantial displacement, activation in water or wet environments, and convenient miniaturization. The miniature underwater robot was developed by Li et al. (2020), who utilized IPMC technology for the construction of its pectoral and caudal fins. 73 The robotic system exhibits a swimming velocity of 4.83 mm/s and a turning rate ranging from 4.5 to 5°/s when subjected to a symmetrical square wave input with a driving voltage of 3 V and a frequency of 1.5 Hz.
In other applications, Shen et al. 74 presented a novel soft multiple-shape-memory polymer-metal composite soft actuator. This actuator had numerous degrees of freedom and was capable of executing intricate movements using two external inputs: electrical and thermal. This groundbreaking actuator was the first of its kind, capable of controlling numerous inputs. It enabled the execution of intricate and routine movements that would be challenging to accomplish with a single actuator and with its high maneuverability made it a significant advancement in actuator technology. In another study, Shen et al. 75 designed an underwater robot utilizing IPMC artificial muscles, which were controlled by thermal and electrical signals. The robot was powered by two soft fins equipped with embedded IPMC actuators, which were coupled to an Eco-Flex membrane. This design was inspired by the swimming behaviors of pectoral fish. The experiments revealed a maximum thrusting force of 12 millinewtons and twisting deformations of 30°. The underwater robot design allowed great deformability and provided maneuverability and agility for subsequent studies. Cheong et al. 76 presented a wireless microgripper powered by an IPMC for biological cell manipulation. The device used an external radio-frequency magnetic field to activate a finger. The prototype had a maximum deflection of 0.765 mm and could grip fish eggs without damage validating proof of concept. A study combining 3D printing with IMPC for soft robotics applications was conducted by Carrico et al. 77 The process utilized additive manufacturing and employed Bayesian optimization as a learning-based control strategy to fabricate 3D monolithic IPMC devices that incorporated sensors and actuators. The manufacturing and control paradigm was utilized to design and regulate the behavior of actuators, and a specific instance of a modular reconfigurable IPMC soft crawling robot was showcased. The process of machine learning improved the performance of actuators, and their proof of concepts can be utilized to further progress sophisticated IPMC devices. Despite the advantages of IMPC, it suffers deficiencies, such as non-standardized preparation steps, relaxation under DC voltage, solvent evaporation, and poor output force and these restrict its application. 78
The Dielectric Elastomer Actuator (DEA) is a material that exhibits motion generation properties comparable to those of human muscle, specifically in terms of force, strain, and driving pressure/density, and undergoes deformation when an electric field is applied, caused by the interaction of quasi-static electric charges. 79 The composition mostly comprises silicone and acrylic materials, with silicone exhibiting a higher response rate and acrylic demonstrating enhanced deformability. The preparation of DEA can be achieved using planar procedures or 3D printing techniques, allowing for the manipulation of its mechanical properties. The authors, Gu et al. (2018a) developed a wall-climbing soft robot that utilizes the features of DEAs for its actuating mechanism. 80 The elastomeric body of the robot exhibited the ability to undergo expansion and bending when subjected to high voltage, and subsequently contracts upon voltage loss to facilitate forward locomotion. The quick ascent velocity of the robot can be attributed to the swift and cyclic deformation of its elastomeric structure. During a state of high dynamic equilibrium, the back foot remains fixed in place while the front foot undergoes forward movement. Additionally, when the dynamic equilibrium of the differential equation is in a diminished state, the two feet undergo a reciprocal interchange of motion states. During a movement cycle, the forward foot is propelled by the deformation of the DEA mechanism, while the rear foot is drawn back through the restoration of the DEA mechanism.
EAPs hold significant promise due to their ability to convert electrical energy into mechanical energy, enabling substantial deformations. However, challenges such as limited actuation speed and scalability exist. Enhancement in electrode materials and manufacturing processes may bolster the performance and scalability of EAP-based actuators. Additionally, integrating EAPs with other materials or technologies could unlock novel possibilities, such as combining EAPs with sensors for feedback control in soft robotic systems.
Chemical-based actuating mechanism
The chemical reaction actuator transforms chemical energy into mechanical energy to facilitate the actuation mechanism, employing methods such as combustion or explosion mechanisms. The utilization of gases possessing a significant amount of energy, such as alkanes and hydrocarbons, is employed. The release of gas results in a significant quantity being produced, leading to an increase in air pressure and then propelling the robot to a predetermined location. Shepherd et al. (2013) introduced a tripodal robotic system designed to combust methane and utilize the resulting explosion for propulsion. 51 The process involved the utilization of electric sparks to initiate the burning of methane gas, resulting in a quick release of gas at a pressure of 71 kPa. This, in turn, induced a sudden movement within the internal gas network. During each detonation event, the robot exhibited a vertical displacement of 30 cm, achieving a maximum vertical velocity of 3.6 m/s. Bartlett et al. (2015) employed a multimaterial three-dimensional (3D) printing technique to fabricate a robot driven by a combustion mechanism. 49 The robot’s structure exhibited a stiff core that seamlessly transformed into a flexible outer layer, enabling unrestricted leaping motions when activated by butane combustion. The robot exhibited autonomous vertical jumping capabilities, reaching a maximum height of 0.76 m, which was equivalent to six times its body height. Additionally, it showcased the ability to do directional jumps, covering a lateral distance of up to 0.15 m, equivalent to 0.5 times its body length or 20% of its jump height, every jump.
Chemical-based actuating mechanisms harness chemical energy for actuation, offering rapid propulsion and directional control. However, safety concerns and limited scalability pose challenges to their practical use. Research into safer and more scalable chemical actuation methods could unlock new applications, particularly in environments where traditional actuation methods may be impractical or hazardous.
Shape-memory based actuating mechanism
Shape memory alloy (SMA) possesses the unique ability to revert to its original shape after being deformed when subjected to heating. 81 This remarkable property makes SMAs highly suitable for use in actuators. The actuation mechanisms based on SMA are essentially classified into two categories: spring form and wire form. Common SMAs encompass Ni-Ti-based, Fe-based, and Cu-based compositions. 82 The utilization of Ni-Ti-based SMA is prevalent in many applications owing to its notable attributes such as exceptional thermal stability, efficient strain recovery, and commendable resistance against corrosion. Additive manufacturing technologies enable the flexible production of this material, rendering it well-suited for the creation of compact, automated, and dependable actuators across several domains. The SMA wire mechanism utilizes electrical current to induce deformation in the primary structure, hence enabling rotational movement and locomotion. In a study Wang et al. (2014a) designed and fabricated a soft robot capable of crawling, drawing inspiration from the movement of caterpillars. 83 The robot demonstrated a traversing distance of 54 mm and achieved a maximum linear velocity of 3.6 mm/s. The SMA spring mechanism serves as the primary body of an actuator, facilitating the connection between its front and rear moving components utilizing a spring that undergoes deformation and expansion. As illustrated in Figure 4(e), Kim et al. (2006) developed a micro-robot that resembles an earthworm and utilizes the SMA spring actuation system for mobility. 84 When activated, the robot’s anterior appendage produced an electro-adhesive force to secure its position on the surface. The application of an electric current resulted in the contraction of the spring, hence induced forward movement of the rear foot. After the rear foot is secured in place, the spring undergoes elongation and subsequently reverts to its initial configuration, which results in the forward movement of the front foot.
One of the major limitations of SMAs is their strain range. These materials have a lower deformability than other smart materials, which limits their usage in applications that need major shape changes. 85 For example, in the realm of medical devices, a narrow strain range may impede the design of sophisticated implanted devices that must fit the contour of the human body. Researchers are investigating novel alloy compositions and manufacturing techniques to increase the strain range of SMAs, thereby enabling the production of more adaptable medical devices.85,86 SMAs have considerable limitations in response time and actuation speed, which is especially noticeable in applications like robotics where swift and precise responses are required. This disadvantage can limit their usefulness in prosthetics or haptic feedback systems. Researchers are continuously investigating approaches to improve this feature, including improving processing techniques for optimizing microstructure and using external stimuli like as magnetic fields to speed up the actuation process. 87 SMAs also encounter cost-effectiveness challenges due to their dependency on expensive and rare components, which limits their wider implementation in industries such as automotive. Researchers are looking at different alloy compositions and processing techniques to remedy this issue and lower manufacturing costs.88,89 Furthermore, SMAs have limited temperature stability, which affects their durability in situations with intense thermal conditions, such as aircraft applications. To solve this, efforts are focused on producing alloys and procedures that improve thermal stability. Furthermore, SMAs are susceptible to fatigue and creep under cyclic loads, which raises durability problems. 90
SMAs offer reversible actuation capabilities, rendering them suitable for diverse applications. Yet, challenges such as a limited strain range, slow response time, and cost-effectiveness hinder their widespread use. Research endeavors focusing on novel alloy compositions, processing techniques, and external stimuli for faster actuation could potentially overcome these challenges. Moreover, advancements in manufacturing processes and material design could lead to more cost-effective SMA-based actuators, facilitating their broader adoption.
Soft actuator types
Soft actuators are constructed of flexible materials that can deform and adapt to a variety of forms making them useful in various environments, and applications.91,92 Figure 5 presents types of soft actuators. Soft actuators are a form of bendable device that attempts to mimic the action and responsiveness of systems. The actuators exhibit distinct responses to diverse physical, chemical, and biological stimuli due to their disparate mechanical and electrical components. Notwithstanding the necessity for adaptability and adherence in the diverse range of potential applications in electronic skin, soft robotics, and implantable/wearable devices in contemporary times.93–96 Types of actuators.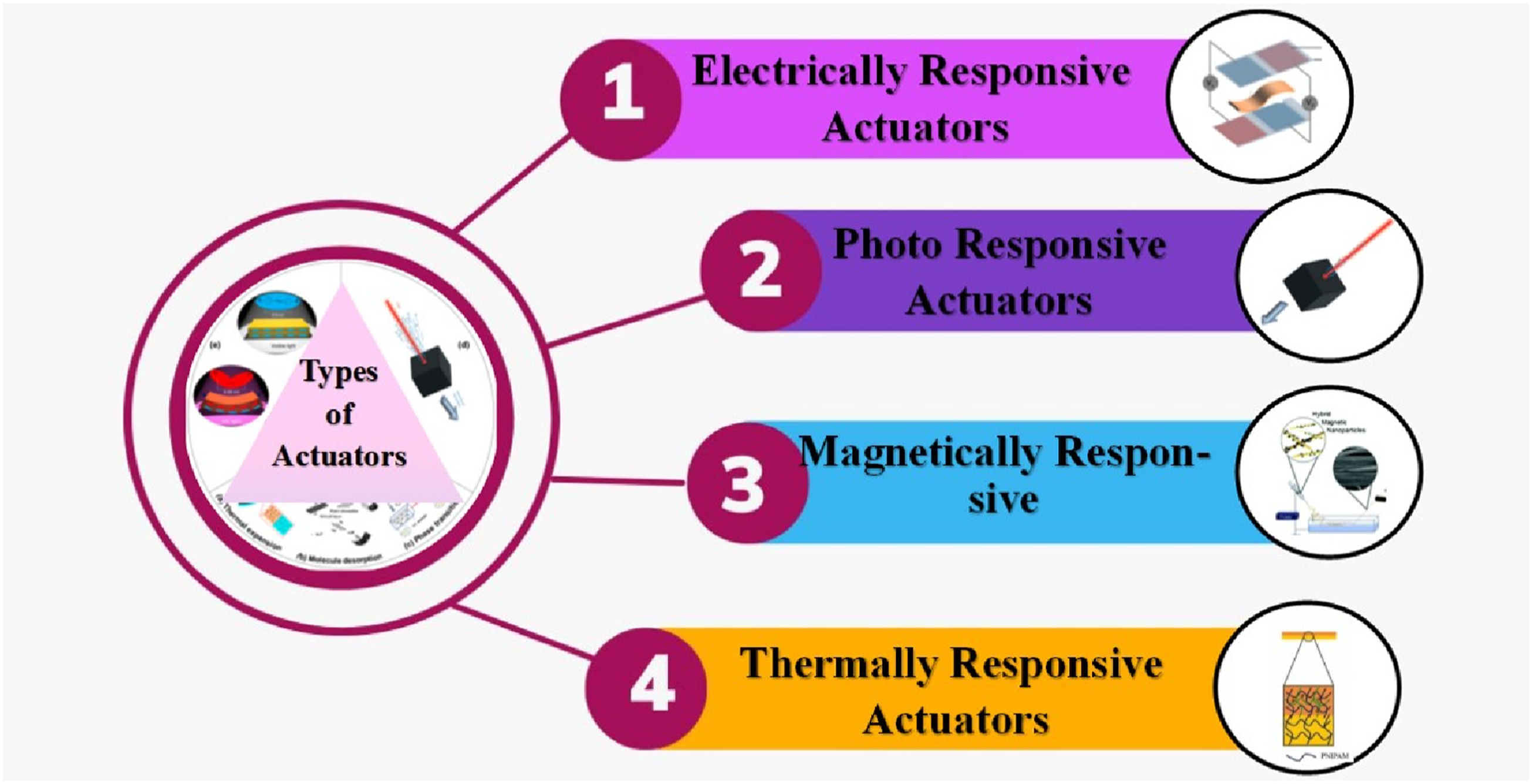
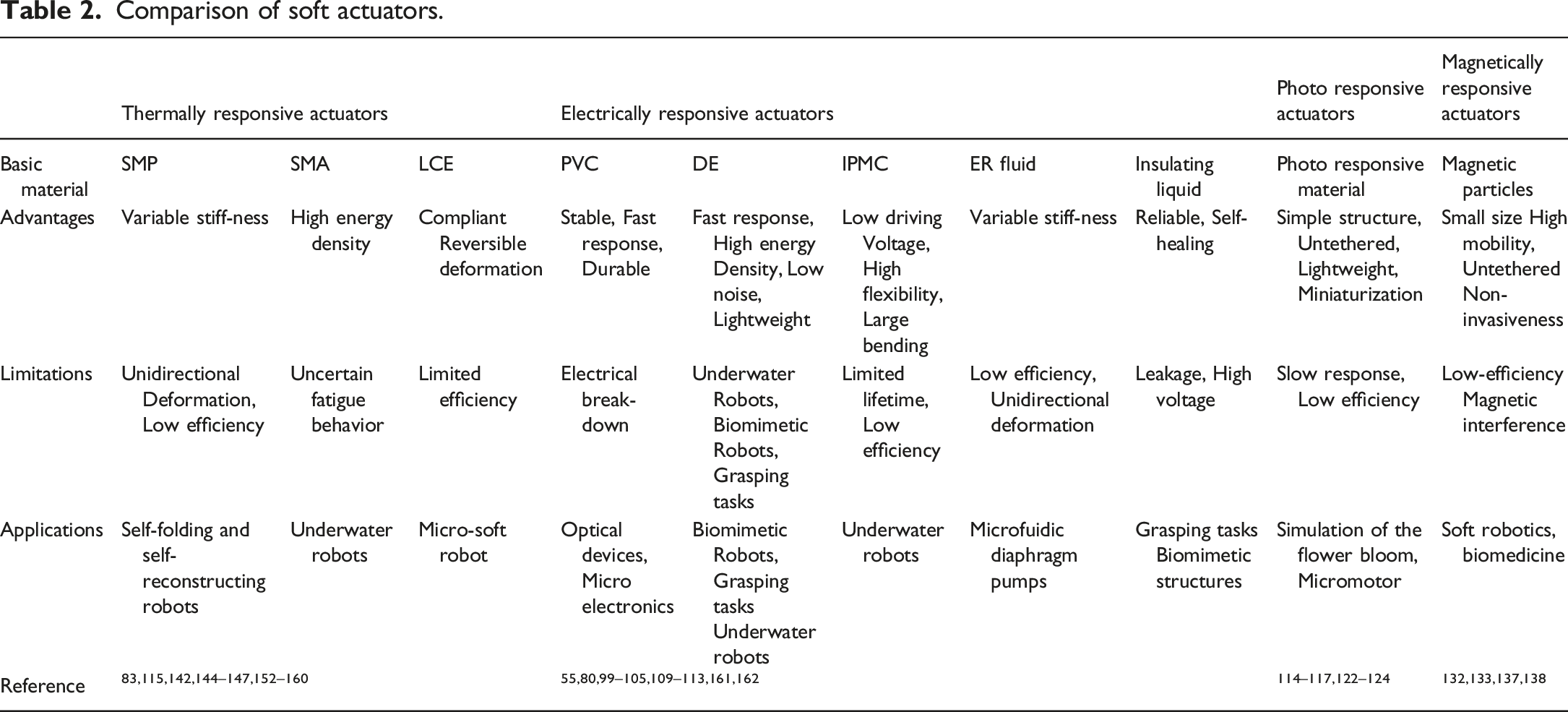
Comparison of soft actuators.
Electrically responsive actuators
Deformation occurs in dielectric elastomers (DEs) when an electric field is applied, making them a type of electrically sensitive material. 64 Maxwell stress is produced when an electric field is induced between two electrodes by the application of a high voltage, often in the range of thousands of volts. The malleable dielectric layer may undergo compression as a result of this stress, decreasing its thickness while increasing its area. As a result of this phenomenon, electrical energy is transformed into mechanical energy. Many flexible materials with the potential to transform electrical energy into mechanical energy have been explored, such as carbon nanotubes (CNTs), liquid metals, along with polymers, fluids (such as ionic liquids and electroactive fluids), gels, paper, and other carbon-based materials. Artificial muscles, microrobots, microscale item manipulation, and microfluidic systems are only a few of the many promising fields of study.97,98 Actuation in soft robots often makes use of dielectric elastomer actuators (DEAs) because of their electrostriction effect. DEA’s small construction and ability to accomplish a wide variety of motions with a single actuation mechanism set it apart from more traditional actuators like motors. Examples of DEA utilization can be found in.55,80,99–105
Piezoelectric-based actuators are major electrically responsive actuators. According to Sohn et al. (2017), piezoelectricity refers to a characteristic of certain materials whereby the application of mechanical or vibrational forces results in the generation of a voltage or electric charge. 106 Conversely, the application of an electric field leads to mechanical deformation of the material. Piezoelectric materials have the potential to be utilized for actuation purposes.107,108
Also, Mechanical Servomotor-Based Actuators have proven to be crucial electrically responsive actuators. The servomotors exhibit certain limitations, namely their inflexibility and bulkiness, which can impede the overall flexibility and softness of the system. Soft robots actuated by servomotors have been documented as capable of achieving diverse modes of actuation, including flight and jumping.109–113 Figure 6 summarizes the electrically responsive actuators. Electrically responsive actuators.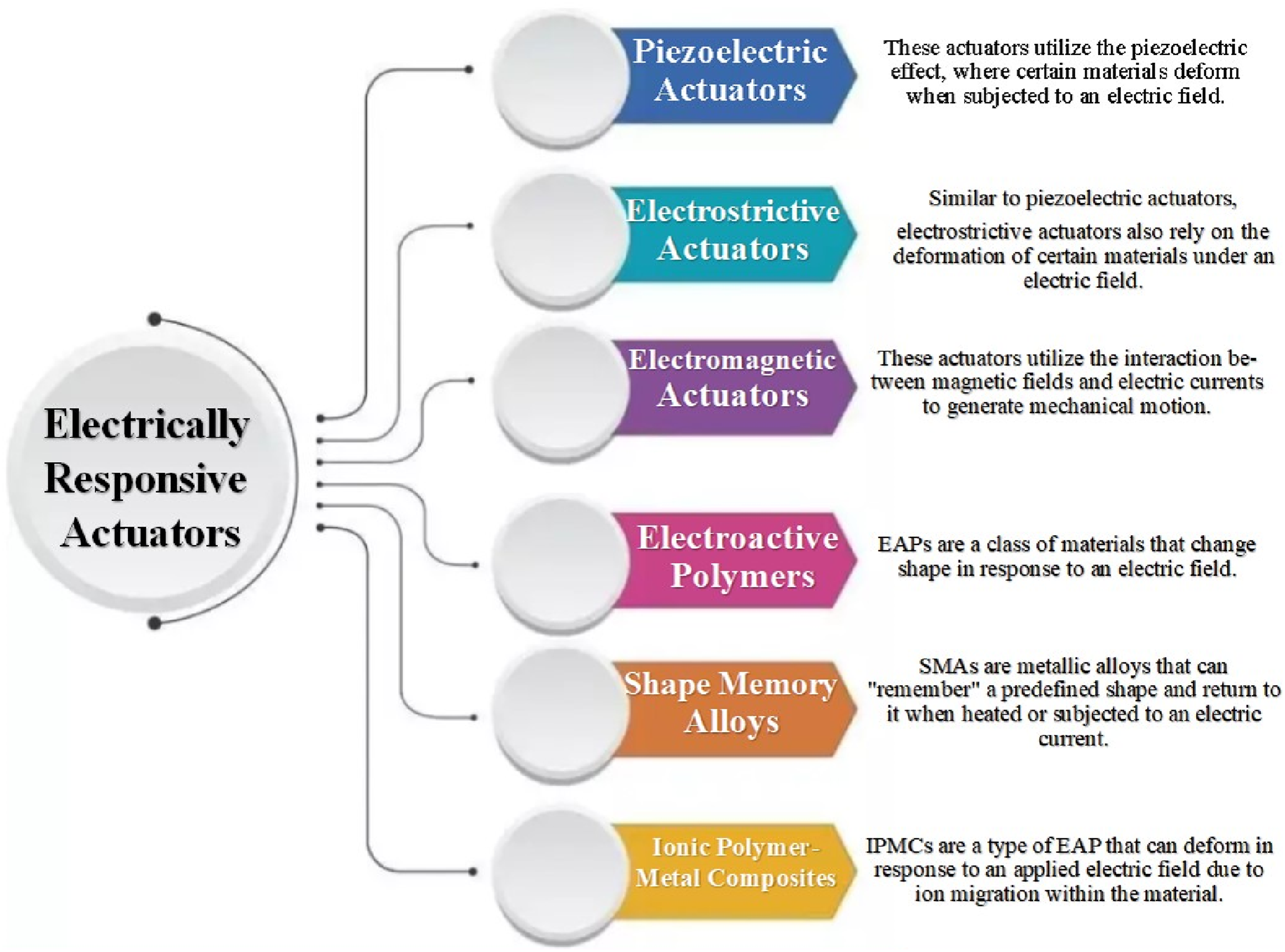
Photo responsive actuators
Actuators that exhibit photo responsiveness are capable of transforming light energy into mechanical motion. Actuators of this nature are commonly composed of a substance or mechanism that experiences a physical or chemical transformation upon exposure to light, thereby eliciting a corresponding alteration in its configuration, location, or other mechanical attributes. Photo-responsive polymers are a class of materials that exhibit changes in their physical or chemical properties upon exposure to light. In recent years, these materials have attracted considerable interest due to their potential applications in numerous disciplines including optoelectronics, sensors, and drug delivery as well as the production of artificial muscles, light-driven valves, and microactuators. 114
Liquid Crystal Elastomers (LCEs) are a type of composite material that consists of a network of polymer chains that are crosslinked and infused with liquid crystal molecules and significant deformations of these materials can occur when exposed to light stimulation. 115 This can be attributed to the synergistic influence of light-induced heating and the realignment of liquid crystal domains. LCE actuators have been investigated for various applications such as in soft robots and optical devices.115,116
Shape Memory Alloys (SMAs) are a category of metallic materials that can regain their initial shape upon exposure to certain stimuli, such as light. Photo-responsive shape memory alloys have been developed by applying a thin layer of photo-responsive material onto the surface of the alloy. 117 The phenomenon of shape recovery or actuation is induced by the localized heating resulting from light absorption by the coating. Cylindrical structures composed of carbon atoms arranged in a distinctive pattern are referred to as CNTs. Upon exposure to light, CNTs exhibit exceptional light absorption properties, which can result in the generation of heat. The integration of CNTs into polymer composites has yielded photo-responsive materials that exhibit actuation properties, making them suitable for utilization in microscale devices and nanosystems. 118
Additionally, Bacteriorhodopsin (bR) proteins are a type of photosensitive protein that is present in certain microorganisms. Upon exposure to light, a reversible conformational alteration takes place, leading to the production of a proton gradient across a cellular membrane. The utilization of the proton gradient has the potential to facilitate the propulsion of mechanical movement. Actuators based on biomolecular motors, specifically BR-based actuators, have been implemented in various applications such as biohybrid systems and microscale devices.119–121 Figure 7 presents examples of photo-responsive actuators. Photo responsive actuators.
The domain of photo-responsive actuators is in a state of constant evolution, with scholars investigating innovative materials, designs, and mechanisms to augment their efficacy and broaden their scope of utilization. As shown in Figure 8, application studies have been conducted.122–124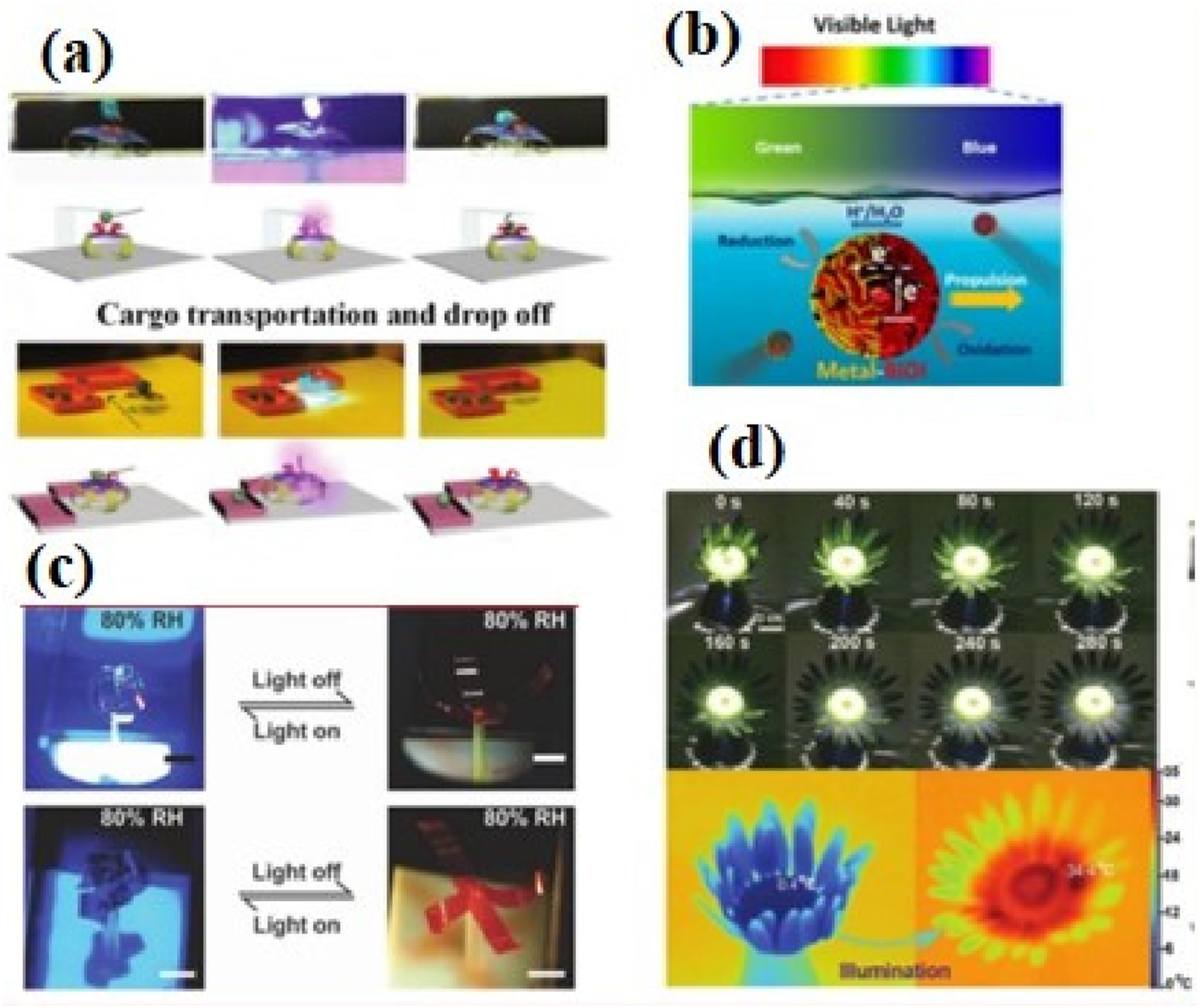
Magnetically responsive actuators
Magnetically responsive actuators refer to devices that possess the ability to transform magnetic fields into mechanical motion (Figure 9). Actuators of this nature commonly employ materials or systems that demonstrate reactions to magnetic fields, resulting in alterations to their physical characteristics such as shape, position, or other mechanical properties and are extensively applied in actuators, soft robotics, sensors, and biomedical devices.125–128
Electromagnetic actuators are comprised of one or more coils that are wrapped around a ferromagnetic core. The application of an electric current to the coil results in the generation of a magnetic field. 129 This magnetic field then interacts with the ferromagnetic core, thereby inducing mechanical motion. Electromagnetic actuators find widespread usage in diverse applications of motion control in robotics, biomedical devices, and biomedical devices due to their uniqueness in speed, precision, force, and scalability. 130
SMAs have the potential to demonstrate magnetostrictive characteristics. Magnetostrictive shape memory alloys (SMAs) exhibit alterations in their shape or dimensions when subjected to a magnetic field. 131 The aforementioned phenomenon is a result of the realignment of the martensitic phase within the shape memory alloy substance. Magnetostrictive shape memory alloys are utilized in a variety of fields, including but not limited to sensors, aerospace, biomedicine, and automobiles.132,133
Magnetostrictive materials (MSMAs) such as the magnetostrictive alloy Terfenol-D, demonstrate a notable alteration in their shape or dimensions upon exposure to a magnetic field. The aforementioned materials exhibit a magnetostrictive phenomenon, whereby their crystal lattice undergoes alterations due to the presence of a magnetic field, thereby leading to mechanical deformation. Magnetostrictive materials have various applications.134,135 Magnetically responsive actuators.
Magnetic gels and fluids, a type of magnetic material, (ferrofluids) are materials that exhibit magnetic properties and can be manipulated by an external magnetic field. These materials are usually a category of composite that comprises a polymeric matrix or fluid medium that is infused with magnetic particles. Upon exposure to an exogenous magnetic field, the magnetic particles exhibit alignment with said field, thereby inducing alterations in the mechanical characteristics of the composite material. Magnetic gels and fluids have been identified as having significant potential for utilization in various fields, including soft robotics, adaptive optics, and biomedical devices.137,138
Ongoing research endeavors are dedicated to enhancing the efficiency, response time, and integration of magnetically responsive actuators, as their development continues to advance. The aforementioned actuators possess distinctive benefits such as non-contact actuation, precise regulation, and resilience to severe surroundings, rendering them appropriate for a diverse array of implementations as demonstrated in Ref. 9,129,136,139,140 and also shown in Figure 10.
Thermally responsive actuators
Thermally responsive actuators are mechanisms that leverage temperature variations to elicit physical movement. The actuators are engineered to demonstrate alterations in shape, volume, or other mechanical characteristics in response to thermal stimuli.
141
These devices are utilized in various domains including but not limited to robotics, microfluidics, aerospace, and biomedical engineering. Shape Memory Alloys (SMAs) are used in thermally responsive actuators due to their reversible phase transformation in response to temperature changes. Alloys, such as nickel-titanium (nitinol), copper-aluminum-nickel, and iron-manganese-silicon exhibit shape memory effects and can undergo a reversible phase transformation in response to variations in temperature.
142
Figure 11 presents a summary of thermally responsive actuators. Thermally responsive actuators.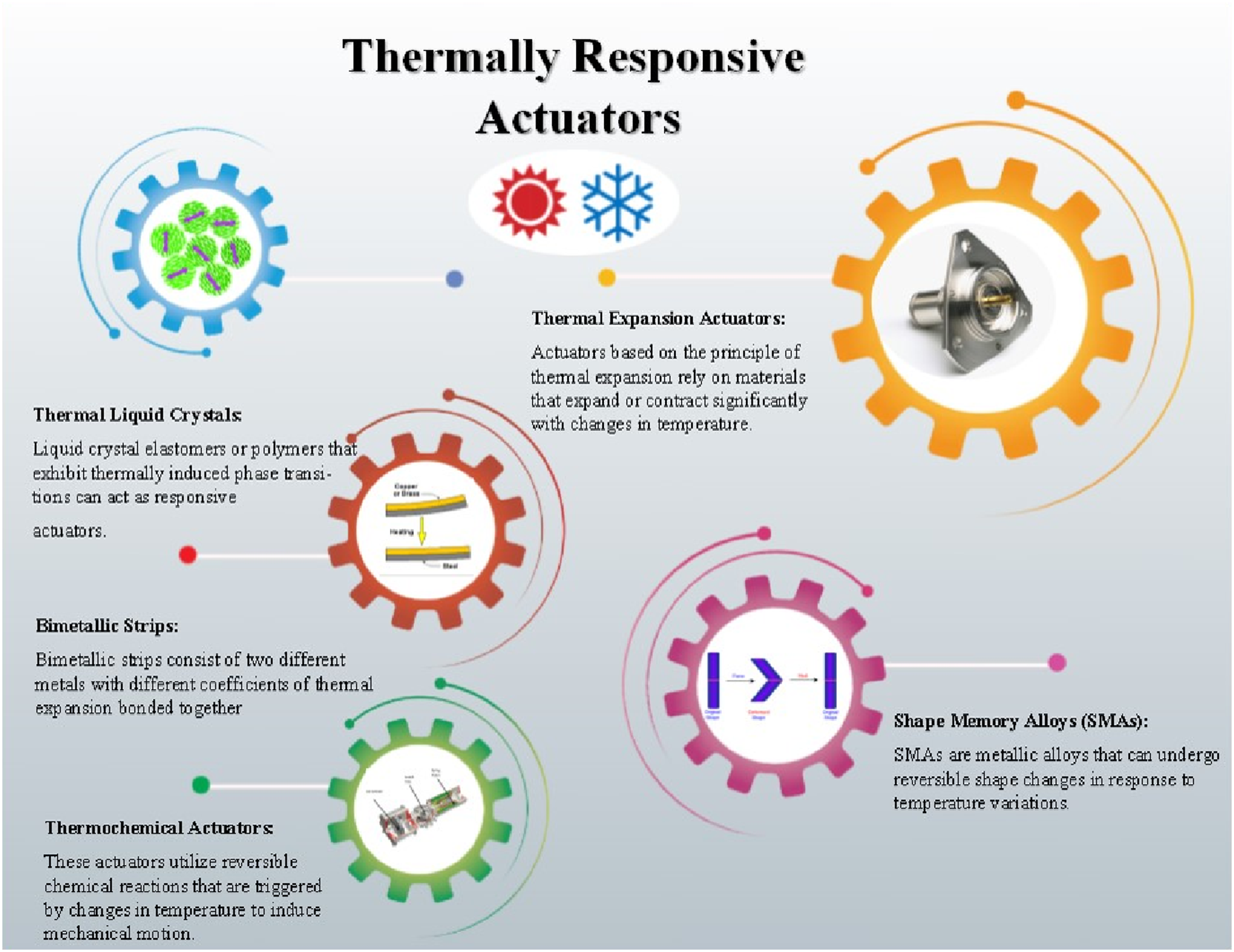
The application of thermal energy to the shape memory alloy (SMA) above its transition temperature enables the material to revert to its original shape, resulting in the production of mechanical movement.83,142–145 Liquid Crystal Elastomers (LCEs) are cross-linked polymeric networks that can undergo significant reversible deformations due to temperature fluctuations.115,146,147
Bimetallic strips are composed of two dissimilar metals that are joined together and possess distinct coefficients of thermal expansion. 148 The differential expansion or contraction rates of metals upon exposure to temperature changes result in the bending of the strip. Flexural movement can be utilized to fabricate thermal actuators, which include temperature-alarm systems. 149
Thermoresponsive polymers are a class of polymers that demonstrate a notable response to changes in temperature, resulting in alterations in their shape, volume, or modulus. 150 Polymers frequently exhibit a phase transition at a critical temperature known as the lower critical solution temperature (LCST) or upper critical solution temperature (UCST). Thermoresponsive polymers find utility in various domains, including drug delivery systems, microvalves, and artificial muscles.150,151
Liquid Crystal Elastomers (LCEs) are polymeric networks that have been cross-linked and infused with molecules of liquid crystal. These materials are capable of demonstrating significant reversible deformations in reaction to alterations in temperature. The macroscopic shape changes of LCEs are caused by the reorientation of liquid crystal domains in response to temperature fluctuations. Laser-induced continuous structures (LCEs) have been observed to have practical uses in various fields such as optical devices, microactuators, and soft robotics.115,146,147
Thermally responsive actuators can be utilized through the employment of pneumatic or hydraulic systems that incorporate temperature-sensitive valves or components. The aforementioned actuators employ the thermally induced expansion or contraction of a fluid or gas to produce mechanical displacement. Selective activation or deactivation of the actuator can be achieved through temperature control. Thermally responsive actuators find utility in a diverse array of applications. Adaptive structures necessitate precise regulation of shape alterations in response to temperature fluctuations, thereby utilizing them. The utilization of thermal energy for actuation facilitates effective and regulated mechanical responses in diverse systems and technologies. Application studies have been conducted in Ref. 152–160 (see Figure 12).
Soft actuator materials
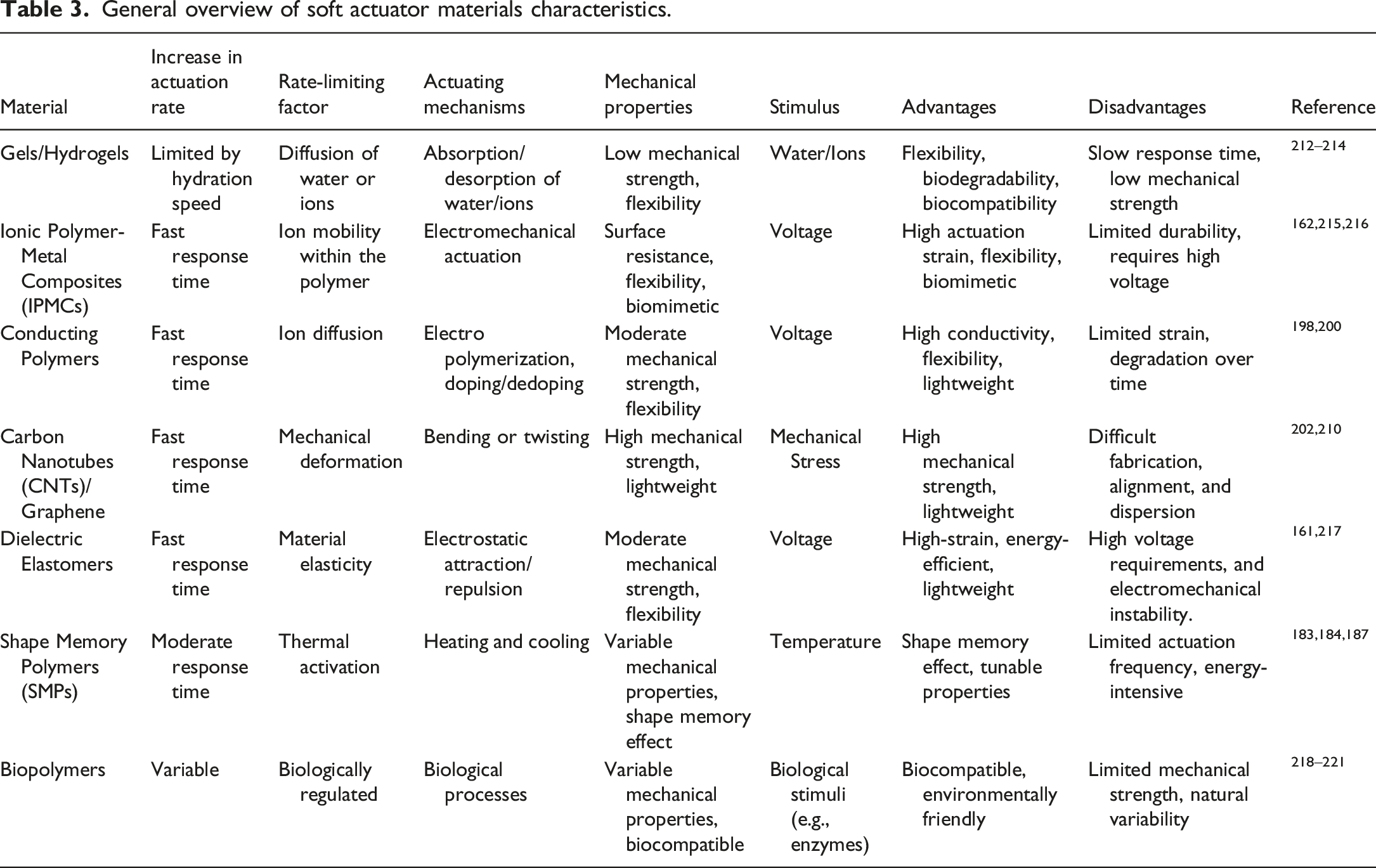
General overview of soft actuator materials characteristics.
Shape memory polymers
Shape memory refers to the ability of a material to retain its original shape after undergoing deformation. This phenomenon is observed in some types of polymers known as Shape Memory Polymers (SMPs) which are regarded as materials possessing the ability to retain a permanent shape and can be controlled in such a manner that a certain temporary shape can be permanently set under suitable circumstances.
180
Following this, the activation of a stimulus such as heat, magnetic field, electric field, and light will induce conversion of the temporary structure into the stored permanent structure.181–183 The fabrication of various device configurations of SMPs encompasses an initial processing phase that involves extrusion, spinning, and pressing. This phase is crucial in establishing the permanent shape of the material above the switch temperature. The subsequent programming of the temporary shape necessitates the application of external mechanical force to the material below its switch temperature. If the exposure to temperatures exceeds the switch temperature while in use, it will revert to its original shape as shown in Figure 13(a)–(d).183,184 When examining the practical implementation of SMP devices, a significant limitation of the conventional simple shape memory effect (SME) is the absence of reversibility in the shape change, resulting in what is commonly referred to as a one-way SME. After the restoration of the permanent shape, an additional programming step is necessary to reconstruct the temporary shape. The requirement for the user of the SMP device to independently execute this phase has frequently impeded the translation of captivating information into marketable products. Shape memory polymers (a) Shape-memory effect as it occurs within a standard thermomechanical cycle.
183
Reproduced with permission, license number: 5747430616409. (b) Working principle of shape memory polymers. Reproduced with permission.
197
(c) Time series photographs that show the recovery of a pure SMP (top row), and a glass-fiber-reinforced SMP (bottom row).
183
Reproduced with permission, license number: 5747430616409 (d) Shape recovery process of thermoset shape-memory polyimide. Reproduced with permission.
184
(e) Designed and tested shape memory petal-like structure can carry a load of 25 g.
193
Reproduced under Creative Commons CC BY. (f) Schematic illustration and the molecular mechanism of a dual SME.
192
Reproduced with permission, license number: 5747431267217. (g) Schematic illustration and the molecular mechanism of a conventional triple shape memory cycle.
192
Reproduced with permission, license number: 5747431267217.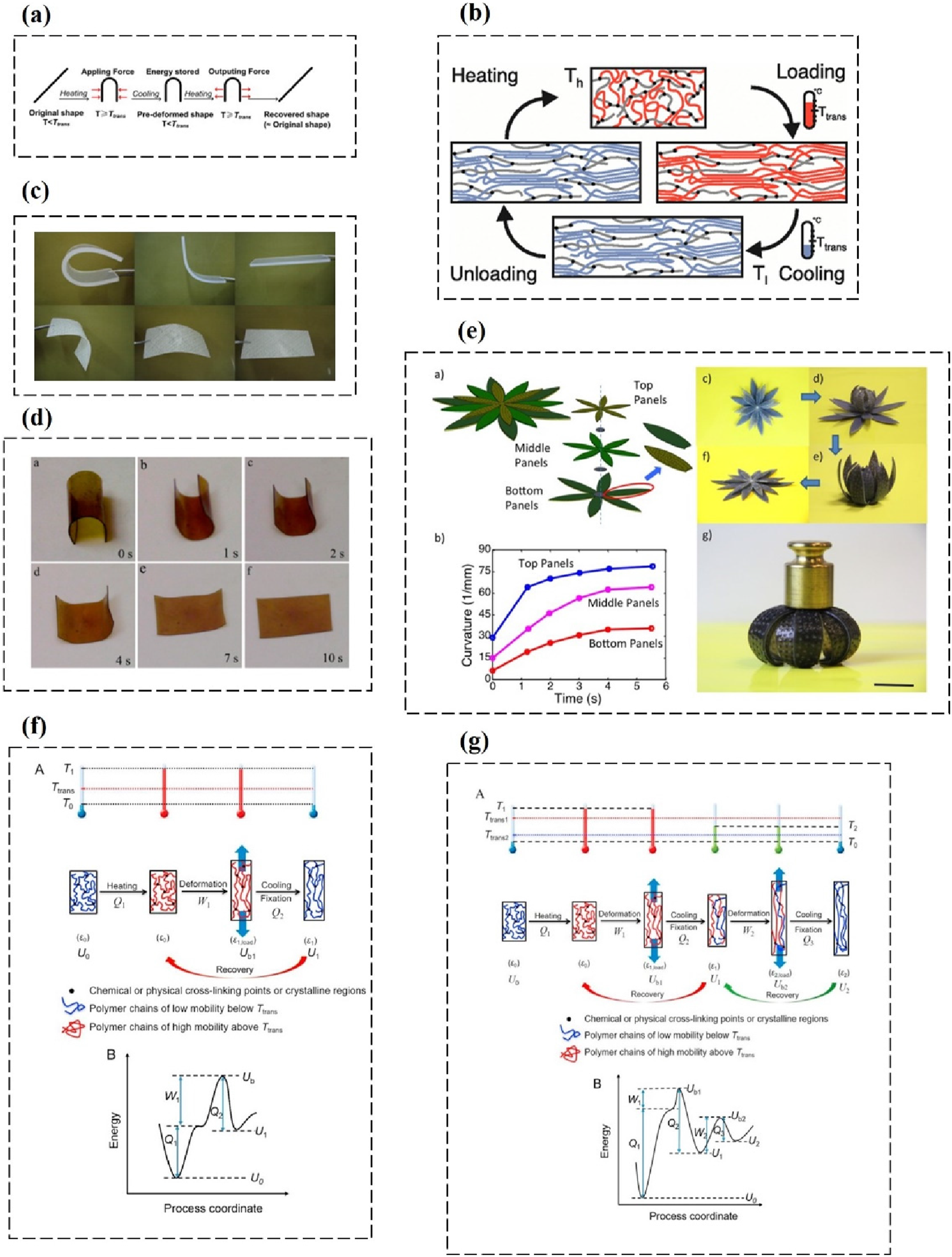
A potential method to address this issue is the development of a form memory device that possesses the capability to undergo reversible shape changes multiple times, without requiring external intervention from the user to initiate the reshaping process. This phenomenon, referred to as the two-way shape memory effect (SME), entails the spontaneous reformation of the temporary shape into the permanent phase after the stimulus responsible for triggering the shape recovery process is ended. As shown in Figure 13(b) and (f), SMPs undergo a process of heating and cooling to reach heat conduction equilibrium. This activates chain mobility, causing a macroscopic shape change and reduced entropy. The sample then freezes to a fixation temperature, trapping entropy and elastic energy. When reheated above Ttrans without stress, the chain mobility is reactivated, re-creating the contraction force and releasing stored elastic energy. In a study by Qi et al. (2016) a composite material was developed by incorporating microfibrillated cellulose (MFC) into poly (propylene carbonate) (PPC), resulting in a biodegradable polymer-based composite . 185 This composite exhibited shape memory capabilities that were responsive to two different stimuli. The composites exhibited enhanced shape memory characteristics as a result of the homogeneous distribution of MFC-BR fibers. The hydrophilic nature of MFC-BR fibers resulted in a decrease in the glass transition temperature and an improvement in the flexibility of the polymer chains. This method has the potential to enhance the use of PPC in the field of smart materials.
In the application of two-way SMPs, two-way SMP particles that can switch shape reversibly in response to temperature were utilized as drug carriers in the study by Gong et al.. 186 Their work presented a method for designing and fabricating polymer particles that can reversibly change shape using a biocompatible and biodegradable polymer network. These particles changed shape from spherical to elliptical, either extracellularly or intracellularly, using a reversible two-way shape memory effect. Utilizing the two-way SME of cross-linked copolymer networks, Behl et al. 187 created reversible, self-programmable window shades. A new strategy for constructing a reversible shape-memory polymer without external force was presented by Fan et al. 188 The material, a blend of crosslinked styrene-butadiene-styrene block copolymer (SBS) and polycaprolactone-based polyurethane (PU) used a two-step crosslinking process to bond SBS phases to PU. This resulted in compressed SBS, serving as internal expansion stress. The approach allowed for mass production and application of the smart polymer. Yang et al. 189 presented crosslinked shape-memory polymer networks prepared using thermally induced free-radical polymerizations of methacrylate-terminated poly (ethylene glycol) and n-butyl acrylate. The networks exhibited thermal-responsive two-way and moisture-responsive one-way shape memory effects, with recovery ratios of 8.2% and 6.2% respectively. They were also moisture-responsive, allowing nearly complete recovery of deformed specimens in moist environments, offering potential biomedical applications.
In contrast, triple-shape memory polymers exhibit the presence of two temporary shapes in addition to their permanent shape.190–192 Initially, it is necessary to program two provisional shapes. The use of an appropriate stimulus will facilitate the transition from the second transitory configuration to the initial configuration. Following this, a secondary stimulus initiates the process of restoring the original form. As shown in Figure 13(g), the triple SME for polymers with two distinct Ttranss (Ttrans1>> Ttrans2) is a process illustrated using thermodynamics. The initial shape is heated above both Ttranss, activating the mobility of all polymer chains. The sample is deformed by external stress, reducing entropy and generating a contraction force. The unfrozen polymer chains shrink to release elastic energy at the temperature between Ttrans1 and Ttrans2. The first temporary shape is deformed by a second external force, generating a larger contraction force. The second temporary shape is fixed, and the recovery process involves heating between Ttrans1 and Ttrans2, reactivating chain mobility, and releasing stored elastic energy.
Shape memory polymers offer a significant advantage due to their customizable mechanical properties. Mao et al. (2016) studied a 3D-printed trilayer system of SMP, hydrogel, and elastomer to regulate actuation time as shown in Figure 13(e). 193 They used hydrogel swelling and temperature to characterize SMPs' actuation, sustaining stiff mechanical properties and fast hydrogel swelling response. High-resolution fabrication of SMP structures was achieved using projection micro-stereolithography and photocurable methacrylate-based copolymer networks, adjusting failure strain up to 300%. Gall and Voit’s collaboration enabled the tailoring of shape memory polymers based on linear monomers and cross-linker ratios, achieving glass transition temperatures and recoverability rates. 194 The superiority of SMPs compared to SMAs mostly stems from their inherent characteristics, including reduced cost, lower density, simplified production, and greater achievable stresses. SMPs have been seen to demonstrate strain levels of up to 200%, which is significantly higher than the strain levels of less than 10%, 1%, and 0.1% exhibited by SMA, shape-memory ceramics, and glasses, respectively. 195
Additionally, the potential applications of SMPs also extend to robotics, the building industry, textiles, and automotive engineering. 196 The unique properties of SMPs, including their ability to retain two or sometimes three shapes and their responsiveness to various stimuli such as temperature change, electric or magnetic fields, and light make them attractive for a wide range of applications. 166 The continuous development and diversification of SMPs are expected to lead to further innovations and expand their applicability across various industries.
Conducting polymers
Conducting polymers (CPs), also known as intrinsically conducting polymers (ICPs) or synthetic metals, are a unique class of materials that combine the properties of traditional organic polymers with electrical conductivity. CPs are offered in various forms such as films, filaments, and fabrics, enabling their operation in both liquid and air environments. CPs utilize the process of redox cycling to carry out their functional activities. The conductivity of CPs is enhanced through exposure to oxidizing chemicals or employing electrochemical oxidation. The soft and flexible nature, mechanical toughness, and high conductivity of these materials render them ideal for use in electrically programmable soft actuators. 198
The alteration exhibited by carbon nanotubes (CPs) can be effectively harnessed in the development of soft actuators capable of executing diverse types of motion, such as bulk, linear, bending bilayer, buckling, and bending trilayer. The actuators can be engineered in many forms such as independent films, strips, or fibers, and are capable of functioning under ambient air conditions. Additionally, these actuators can facilitate out-of-plane displacement in bilayer layouts. Their ability to change volume makes them useful aside from actuators. The inherent volume change properties of CPs result in interesting opportunities for applications. The study by Lee et al. (2009) demonstrated polypyrrole (PPy) a type of CP tangible benefits when combined with optical coherence tomography as shown in Figure 14.
199
Their study induced two-dimensional controlled bending motion in a four-electrode catheter configuration. Furthermore, the integration of this dynamic catheter with optical coherence tomography (OCT) is explored. OCT’s ability to visualize biological tissue beneath the surface complements the active catheter’s capabilities. The study showcases the potential of imaging biological tissue using the active catheter’s tip, thereby merging real-time visualization with precision navigation. The designs of PPy-based artificial muscle-actuated catheters showcase the actuators grown onto a catheter with spiral skeletons and plastic substrates.
199
Reproduced with permission, license number: 5747440170701.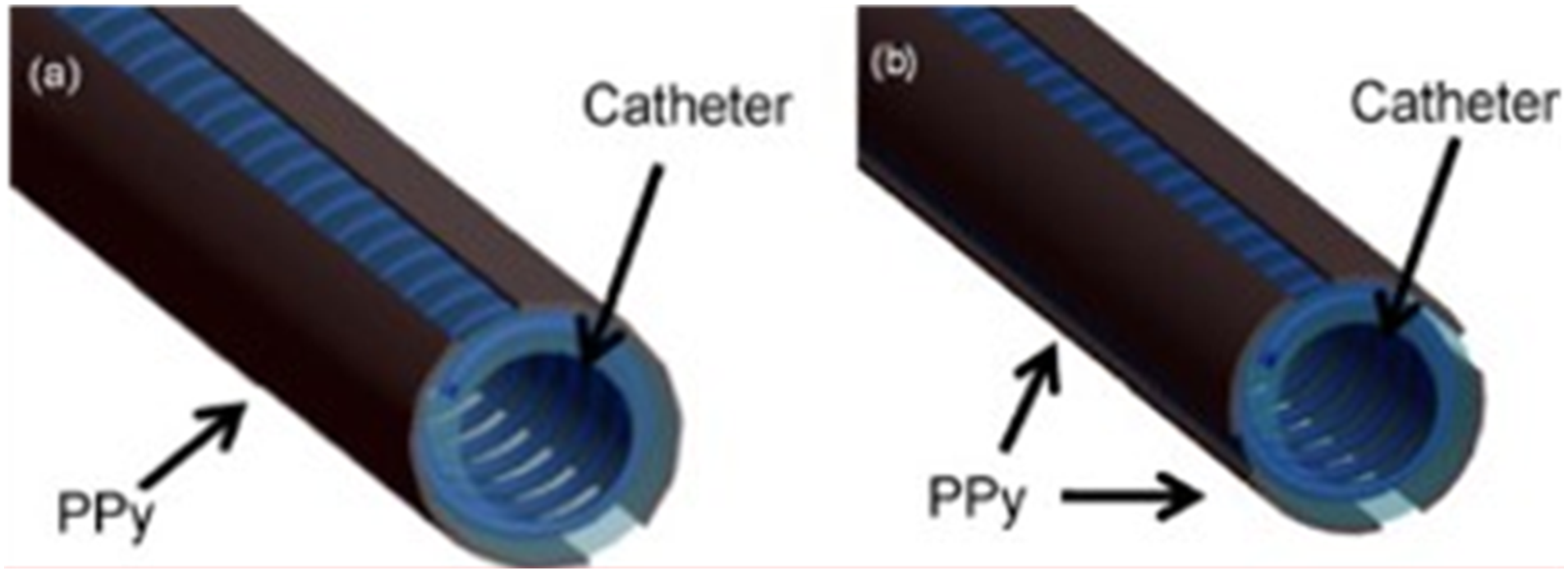
Guimard et al. (2007) explored the properties of conducting polymers (CPs) for biomedical applications, including biosensors, tissue engineering, and neural probes. 200 It discussed their synthesis, unique properties, and modification for various applications, highlighting their significant impact in the field. CPs are widely recognized for their appealing characteristics, including their ability to operate at low voltages, exhibit significant strain and contraction force, enable microfabrication, and provide facile preparation under optimized conditions. These attributes distinguish CPs from other electroactive polymers (EAPs). Nevertheless, there exist several constraints that hinder the commercialization of CP actuators. These limitations include sluggish response times, the requirement for an electrolyte source, the need for encapsulation, and low electromechanical coupling efficiency. Also, creeping is a setback for CPs. The study by Madden et al. (2007) examined the creep response and cycle life of polypyrrole actuators in propylene carbonate. 90 The films extended passively by 2% after 100 min at 20 MPa, with a non-linear and history-dependent response at high loads. They emphasized the polymer is best operated at loads below 20 MPa for position control. However, films cycled with square wave potentials showed a drop in active strain, with a decrease in charge transferred, suggesting polymer degradation.
CNTs and graphene
The limitations associated with polymer-based actuators, including low energy conversion rate, slow reaction, and a limited life cycle, 201 have led to a growing interest in the study of carbon-based nanomaterials for the development of advanced actuators. These nanomaterials offer a combination of advantageous properties found in both inorganic materials and polymers, such as conductivity and flexibility. 202
The process of graphene synthesis has undergone several transformations leading to its current state. The process of isolating graphene through micro-mechanical peeling of graphite has been successfully employed to get monolayer or few-layer graphene of exceptional quality, making it suitable for the production of electrical devices as well as the process of mechanically exfoliating graphite yields pristine graphene of exceptional quality, as it does not include any functionalization. 203 This is due to the inherent uncontrollability of graphene in terms of its shape, size, and placement. To tackle this issue, researchers have developed chemical vapor deposition (CVD) techniques as a means of producing graphene films of exceptional quality. 203 These techniques offer the advantage of regulated development processes, resulting in films that possess desirable features like as high conductivity and transparency. Consequently, these attributes make them highly suitable for utilization in actuator applications. Nevertheless, the chemical vapor deposition (CVD) technique continues to encounter some obstacles, including the issue of exorbitant expenses and intricate manufacturing processes. One potential approach involves employing chemical exfoliation techniques to convert graphite into chemically modified graphene (CMG), such as graphene oxide (GO), which serves as a precursor for reduced graphene oxide (rGO). 204 This procedure enables the production of graphene that can be easily processed in solution. The affordability, convenience, and scalability of this approach render it indispensable for the large-scale manufacturing of devices utilizing graphene. Nevertheless, the performance is influenced by the accurate manipulation of the sizes of graphene sheets. The enhancement of this can be achieved through the chemical functionalization of carbon-based compounds. Zhang et al. (2019) effectively synthesized distinctive graphene nanocomposites by a reaction method involving amino-ester-amide bonding. 205 The researchers found that the CoFe2O4/graphene nanocomposites, which are covalently bounded, exhibit exceptional electromagnetic wave absorption capabilities in comparison to nanocomposites that are not bonded by covalent interactions. The study conducted by Wang et al. (2019) involved the synthesis of reduced graphene oxide (rGO) and N-doped rGO using a straightforward method that utilized microwave reduction with minimal energy input and a brief reaction time. 206 The performance of the carbon catalysts produced from various sources was assessed by the catalytic ozonation process of 4-nitrophenol (4-NP). In contrast to thermally annealed reduced graphene oxides (rGOs) in an argon environment, microwave-treated rGOs exhibited superior performance in catalytic oxidation. Additionally, the introduction of N-doping was shown to enhance the catalytic activity even further. According to Huang et al. (2012), graphene-actuating materials exhibit excellent mechanical, electrical, optical, and thermal properties. 201
The application of an electric field to graphene sheets resulted in the injection or extraction of charges from the sheets, leading to the expansion or contraction of the film. Additionally, a portion of the electric power can be transferred to thermal energy as a result of the resistance shown by the graphene film. Wang et al. (2011) studied the fabrication of fibrous nanocomposites using carbon nanotubes, graphene-oxide, or graphene by a straightforward coagulation spinning approach. 207 These nanocomposites have shown a synergistic improvement in mechanical strength, electronic conductivity, and electrical actuation capability. When a sinusoidal voltage waveform was applied, the resulting actuated displacement exhibited harmonic oscillations that precisely aligned with the applied waveform, resulting in the generation of sinusoidal curves with identical frequencies. It is noteworthy to mention that the displacement consistently occurred in the same direction, regardless of the direction of the applied voltage. This demonstrated that graphene functions as a material with both electrical and thermal conductivity, transferring heat to its polymer matrix when an external voltage is applied. The phenomenon of periodic heating occurred as a result of the passage of an alternating current through the fiber, leading to cyclical thermal expansion and contraction. The exceptional actuation performance seen can be primarily attributable to the expansion of the polypropylene film generated by temperature effects, the bimorph structure, and the energy conversion property of graphene. An artificial flower, consisting of four actuator components, was created to demonstrate the optical and electrical blooming capabilities of the actuator. This showcased the potential of using the actuator in the construction of various biomimetic devices, enabling the realization of intelligent mechanical outputs.
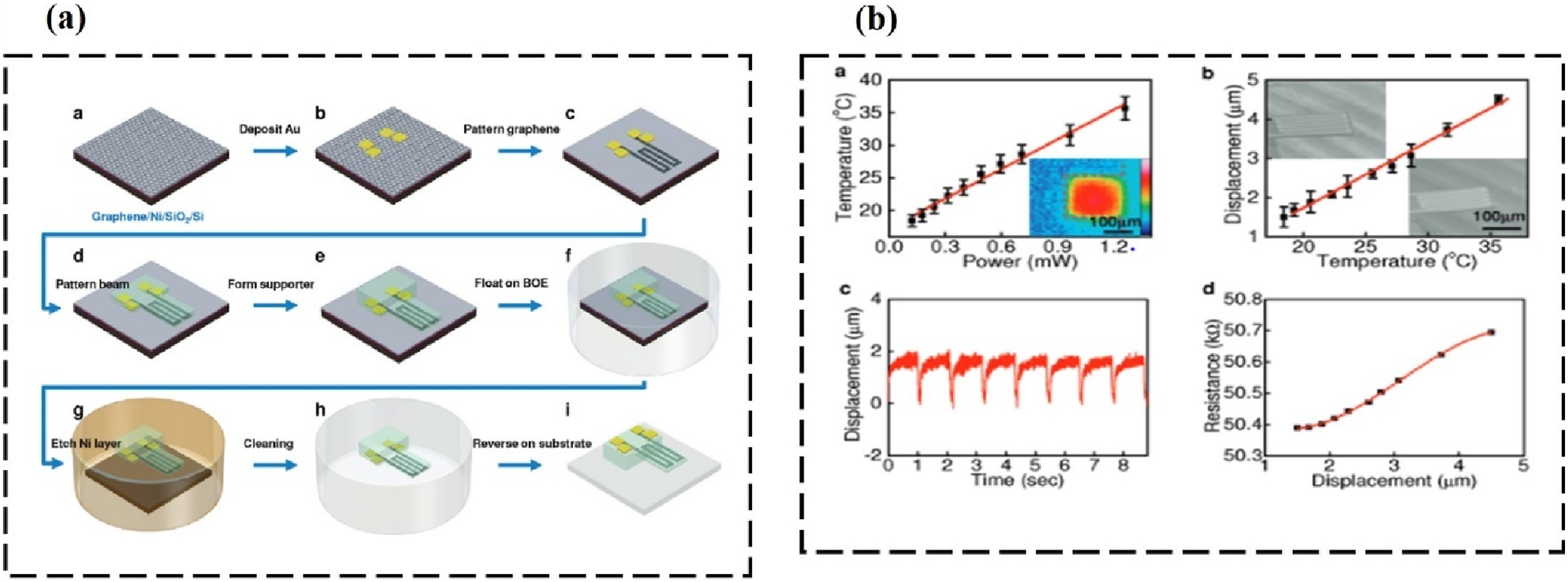
Zhu et al. (2011) conducted a study on the development of a unique approach for fabricating graphene-on-organic film, which is compatible with a batch microfabrication process as illustrated in Figure 15(a).
208
This technology was employed in the creation of electromechanically driven micro actuators. The researchers incorporated an extremely thin layer of graphene sheets into their investigation, thereby combining them into a single structure. They utilized the distinctive material properties of graphene, such as its negative thermal expansion and excellent electrical conductivity, to create a bimorph actuation mechanism. The effective demonstration of transparent graphene-based organic microactuators was achieved by seeing a significant displacement with rapid reaction, while also preserving low power consumption as shown in Figure 15(b). Electrochemically stimulated actuators obviate the requirement for a temperature differential to activate the actuators. The process entails the introduction of ions into actuator materials within an electrochemical setting. The actuators possess a bilayer configuration, wherein actuation is achieved through disparate reactions of two materials located on opposite sides of the actuators while being subjected to identical electrochemical circumstances.
209
(a) The schematic diagram demonstrates the fabrication of an RGO/PP bimorph actuator, including drop casting, reduction, and adhesion, and shows dual responsive actuation under light stimulation or electrical voltage.
211
(b) The blooming of artificial flowers is driven by optical and electrical stimulation.
211
(c) Schematic diagram of the fabrication process for graphene and epoxy hybrid cantilever system.
208
(d) Performance characterization of a graphene-based organic bimorph microactuator.
208
Research conducted by Xie et al. (2011) showcased the remarkable strain-responsive properties of graphene sheets with load tolerance. 210 These graphene sheets exhibited a maximum strain response of up to 0.85%, which is four times greater than the strain response observed in actuators based on carbon nanotubes. The graphene exhibited a high strain response and possesses the ability to withstand loading, rendering it a suitable candidate for the construction of sophisticated actuator systems.
In a separate investigation, the researchers successfully fabricated an innovative electrochemical actuator utilizing graphene. The actuator was constructed using a meticulously engineered monolithic graphene film, which had surfaces that were intentionally modified asymmetrically. 222 In this study, the researchers employed Hexane and O2 plasma treatment on different sides of the graphene film to induce asymmetrical surface features. This resulted in asymmetrical electrochemical responses, which were found to be responsible for the observed actuation behaviors. Their graphene actuator introduced a novel approach to fabricating actuators and demonstrated the potential of graphene film for implementation in diverse electromechanical systems.
Hyeon and colleagues conducted a study whereby they utilized the biscrolling technique to construct coiled graphene/carbon nanotube (CNT) yarns. 223 The purpose of this fabrication approach was to enhance the capacitance of the yarns, hence enabling more tensile actuation. The researchers found that the coiled graphene/CNT yarns exhibited improved performance in terms of ion utilization at a given voltage compared to pristine CNT coils. Graphene, when employed as a constituent material of CNT yarn, has been observed to yield enhanced capacitance within the overall artificial muscle system. Under a three-electrode system and at a voltage of −3 V, the graphene-based yarn exhibits a tensile actuation of 19%. This value is approximately 2.5 times greater than the coiled bare CNT muscle, which has a tensile actuation of 8%. Additionally, the graphene-based yarn demonstrates a work capacity of 2.6 Jg−1. The utilization of biscrolled graphene as a means of enhancing performance was a significant factor in guiding the fabrication of yarn structures with improved actuation capabilities.
Ionic polymer-metal composites
The ionic polymer-metal composite (IPMC), is classified as an electroactive polymer (EAP) 224 and exhibits notable benefits when employed in soft actuators. The IPMC is comprised of four essential components, namely the mid-layer, cations, solvents, and electrode layers. 215 The IPMC is a sandwich-like configuration with three distinct layers, namely a slender electrolyte membrane and two electrode layers composed of noble metals. The basal membrane is composed of materials such as Nafion, Flemion, and Aciplex. On both sides of the substrate, a layer of conductive electrode is electroplated using noble metal salts or combinations. The application of an electric field induces the movement of cations and water molecules towards the cathode, resulting in the generation of strain in the vicinity of the cathode. The IPMC exhibits a bending behavior toward the anode as a result of anisotropic concentration distributions, as reported by.225,226 When subjected to mechanical deformation or another external stimulus, the phenomenon of ion migration takes place as a consequence of the strain gradient, leading to the establishment of potential differences on both sides. The actuation mechanism of IPMC is determined by the ion transport and electro-mechanical characteristics of ionic polymers. Consequently, the design of high-performance actuators necessitates the incorporation of many features such as a micro-/nano-morphology network, hydrophilic nano-channels, microphase-separated morphology, well-dispersed pore structure, highly conductive molten ionic salts, and flexible electrode materials.
The advantageous characteristics of this material encompass a range of qualities, including but not limited to its lightweight nature, flexibility, softness, and most notably, its ability to efficiently convert electrical energy into mechanical energy. 162 Additionally, it exhibits a significant bending strain response when subjected to low activation voltages, consumes minimal power, demonstrates rapid response times, and possesses mechanical and chemical tolerance and stability. 162 Nevertheless, there exist several challenges linked to IMPCs, including relaxation when subjected to direct current (DC) voltage, inadequate output force, evaporation of solvents, lack of standardized preparation procedures, and high manufacturing costs resulting from the utilization of fluorinated polymers. According to Jung et al. (2003) and Lee et al. 2005,78,227 several solutions have been proposed to optimize the performance of IMPC for actuation. The preparation process of the IMPC encompasses several sequential stages, each of which is influenced by various elements that impact the performance of the IPMC. Therefore, it becomes imperative to undertake the optimization of these critical factors.
Chang et al. (2012) introduced a methodology for the preparation of Pd-type IPMC, which emphasized the pretreatment, impregnation-reduction plating, and autocatalytic plating processes. 228 The procedures were enhanced, resulting in a reduction in the addition of agents, thereby exerting an influence on the physical properties of IPMC. In addition, Wang et al. (2014) conducted experimental investigations on the effects of sandblasting on surface and interfacial electrodes. 216 Their findings demonstrated that this method of controlled roughening has the potential to enhance many characteristics of IPMCs, such as surface resistance, equivalent modulus, and capacitance, specifically on Nafion substrates. To mitigate the destabilizing impact of the relaxation effect on IPMC actuators, Bennett and Leo (2004) proposed modifying the water content and employing an ionic liquid as a solvent. 229 The limited output force of IPMCs imposes constraints on their application in situations that need high output force. One potential method for enhancing the output force is to manufacture an IPMC with a more substantial base membrane. Kim (2002) developed an ionic polymer-metal composite (IPMC) actuator featuring an increased membrane thickness. 230 This modification resulted in the actuator’s ability to generate a force of 4.5 gf when subjected to a 3 V direct current (DC) input. The performance of IPMC was investigated by He et al. (2011), wherein various thicknesses were examined. 231 The findings of the study indicated that the augmentation of Nafion membrane thickness resulted in a reduction in deformation and an increase in output force when subjected to a voltage of 3.5 V. An alternative approach to enhance the output force of IPMC can be achieved through the introduction of doping chemicals into the polymer membrane.232,233 Ru et al. (2016) introduced a novel IPMC actuator through the incorporation of water-soluble sulfonated multi-walled carbon nanotubes (sMWCNT) into the Nafion matrix. 234 The actuator exhibited increased bending deformation and output force when subjected to a lower driving voltage, specifically achieving a magnitude of 14.37 mN when a 3 V direct current (DC) was applied. Wang et al. (2014) successfully produced polymer membranes by incorporating additives. 235 Their findings revealed that the actuator based on ethylene glycol (EG) exhibited superior electromechanical capabilities when subjected to a direct current (DC) voltage of 2 V.
Researchers have already proposed numerous applications of IPMC as a soft actuator Yamakita et al. (2005) proposed the development of a swimming robot that resembles a snake and utilizes an IPMC actuator. 236 In a study conducted by Guo et al. (2007), IPMC was employed as a constituent of the actuators designed for an underwater microrobot resembling a jellyfish. 237 Palmre and colleagues developed a biologically inspired IPMC actuator in the form of an active fin, which exhibited the ability to both bend and twist. 238 Tripathi et al. (2019) developed an IPMC actuator, which served as a prototype for an application involving the active maneuvering of a catheter-guidewire. 239 A revolutionary robotic Venus flytrap (VFT) was built by Shahinpoor (2011), utilizing IPMC artificial muscles as distributed nanoactuators. 240 In a study conducted by Wu et al. (2015), a graphitic carbon nitride nanosheet electrode-based ionic actuator was investigated. 241 The actuator demonstrated notable electrochemical activity and electromechanical conversion capabilities. These included a substantial specific capacitance of 259.4 F g−1 when employing an ionic liquid as the electrolyte. Additionally, the actuator exhibited a rapid actuation response of 0.5 ± 0.03% within 300 ms, a significant electromechanical strain of 0.93 ± 0.03%, and exceptional actuation stability of up to 100,000 cycles under a 3 V.
Gel-based materials
Based on a contemporary definition, a gel can be described as a resilient solid substance consisting of a polymer that forms a physically or chemically interconnected three-dimensional structure within a medium composed of another component, typically a liquid. 212 The presence of an adequate quantity of the liquid component is essential for maintaining the gel’s elastic characteristics. The gel’s solidification is attributed to the interlocking network of elongated polymer molecules. The composition of the system is comprised of a crosslinked network with elastic properties, alongside a fluid that occupies the interstitial spaces within the network. Gels possess a moist and pliable nature, enabling them to endure substantial deformations in response to alterations in their surrounding environment. Structural liquids possess a yield strength and exhibit a measured elastic modulus. Gels can be classified into physical and chemical gels, depending on the nature of their crosslinking network. Physical gels, such as gelatine, agarose, and clays, are created by the establishment of reversible physical crosslinks. Conversely, chemical gels, exemplified by covalent connections, are characterized by their irreversibility. 212 Gels composed of water-soluble polymers can be synthesized using polymerization with a crosslinking agent or through a crosslinking reaction. Chemical gels, such as polyacrylamide, polyacrylic acid, hydroxy-ethylmethacrylate, silicon, and vinylpyrrolidone, serve as illustrative instances.
According to Koetting et al. (2015), hydrogels are complex structures composed of polymeric chains interconnected by tie points or joints and are immersed in water until reaching a state of thermodynamic equilibrium.
242
Peppas (1996) reported that hydrogels have distinctive properties due to the presence of hydrophilic polymers that undergo crosslinking, resulting in the formation of an insoluble yet remarkably hydrophilic framework.
243
Hydrogels, as indicated by a fundamental characterization, encompass a diverse range of materials that can be synthesized by various methods and manifest distinct properties.
244
For example, the crosslinks that constitute the hydrogel network can adopt various configurations, including covalent chemical connections, ionic contacts, weak physical entanglements, hydrogen bonding, or other dipolar interactions. There are numerous ways available to produce chemical cross-linking. The utilization of dimethacrylates as monomers in a chain polymerization process results in the formation of crosslinked polymers. This is due to the incorporation of methacrylate functionalities at two distinct positions along the polymer backbone, hence facilitating the establishment of cross-linking. In contrast, glutaraldehyde has been extensively employed as a reagent following polymerization to facilitate the process of crosslinking after the formation of polymer chains. Hydrogels can exhibit either permanent or transient cross-links, hence determining their structural configuration. Chemical bonds are responsible for the formation of permanent cross-links, whereas temporary cross-links serve to stabilize the temporary shape. According to Shiblee et al. (2019), the reprogramming of the hydrogel’s form can be achieved through the utilization of temporary cross-links.
245
However, it should be noted that this process necessitates higher dissociation temperatures. According to Argun et al. (2018), many crosslinking strategies can be employed in the process of manufacture.
246
These strategies encompass the utilization of multivalent ions, hydrogen bonds, donor-acceptor interactions, and particular interactions. In conjunction with the diverse array of crosslinking techniques employed, hydrogels can exhibit markedly distinct ultimate morphologies. Hydrogels can exhibit various structural characteristics, including amorphous, semicrystalline, supramolecular, or colloidally aggregated configurations. Hydrogel-based soft actuators possess the capability to be controlled and manipulated through a wide range of stimuli. Various physical or chemical external stimuli can be utilized to generate reversible or single-cycle phase changes in hydrogels. The physical stimuli encompass thermal, magnetic, ultrasonic, electrochemical, and light stimuli, while the chemical stimuli consist of pH, redox reactions, supra-molecular complexes, and biocatalytically driven processes.
212
As illustrated in Figure 16, hydrogels can undergo either homogeneous or inhomogeneous deformation.
247
Alterations in environmental factors, such as temperature, pH, and light, induce a uniform volumetric expansion or contraction of hydrogels homogeneously in all directions. Complicated deformations, including bending, twisting, and folding, are generated due to non-uniform expansion or contraction, which varies in magnitude along different directions.213,214 Deformation mechanisms of hydrogel swelling (a) homogeneous swelling, (b) homogeneous bending, (c) inhomogeneous bending, (d) snap-buckling of hydrogel.
247
Reproduced with permission, license number: 5747441429892.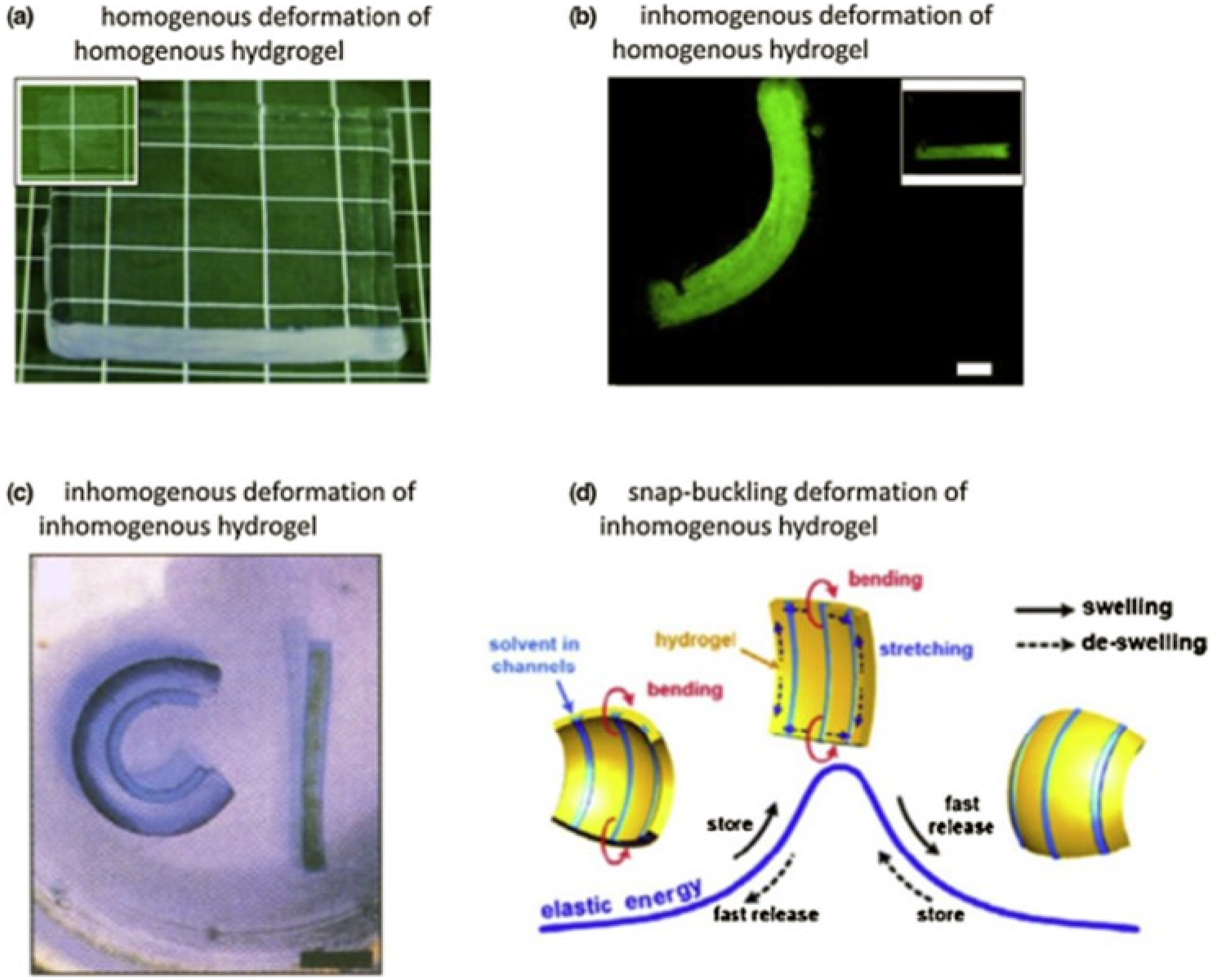
Han and colleagues (2014) investigated the PAN-based copolymer hydrogel. Their study focused on the potential for controlled heterogeneous stem cell differentiation. 248 The researchers observed a shape memory effect in the hydrogel, which was attributed to dipole-dipole interactions with zinc ions. These interactions were found to have an impact on the physiological function of the cells. Harada et al. (2015) developed redox-responsive shape memory gels possessing self-healing capabilities, which were accomplished by leveraging host-guest interactions involving cyclodextrin and ferrocene. 249 The study conducted by Zolfagharian et al. (2017) introduced a novel soft hydrogel actuator fabricated by three-dimensional (3D) printing technology. 250 The actuator incorporated contactless electrodes and employs chitosan, a promising polyelectrolyte, as its constituent material. The printing parameters were optimized to cater to certain geometrical models, while the utilization of 3D printing technology enhances actuation performance through the augmentation of the surface-to-volume ratio. The actuator exhibits promising potential for various applications owing to its unique geometric, functional, and controlled characteristics.
Biopolymers
Given the ongoing expansion and progress in the area of soft actuators, as well as the imperative to mitigate their environmental footprint and foster sustainability. 251 Actuators that are sustainable are specifically engineered to minimize their ecological footprint and foster the principles of sustainability. 252 One potential strategy for attaining sustainable actuators involves the incorporation of biodegradable materials into their design. Soft actuators have the potential to be fabricated using materials that are specifically engineered to undergo natural decomposition upon reaching the end of their operational life. According to Kim et al. (2022) and Stroganov et al. (2015), implementing this approach has the potential to decrease waste production from the device and foster sustainability.218,219
Biopolymers are a class of polymers that have several desirable characteristics, including biodegradability, biocompatibility, renewability, and cost-effectiveness.253,254 These polymers are synthesized by living organisms such as plants, animals, and microorganisms. 253 These entities exhibit sensitivity to several conditions, including temperature, humidity, pH levels, light intensity, and electrical or magnetic fields. 255 These entities serve the purpose of maintaining cellular cohesion, transmitting chemical messages, aiding in the retention of moisture and flexibility of the skin, facilitating smooth movement of joints and gastrointestinal functions, as well as offering protection against harmful microorganisms. Cellulose, silk, starch, keratin, chitosan, and gelatin are naturally occurring polymers that show great potential for use in engineering applications such as construction, pharmaceutics, flexible devices, and wearable electronics. This is because they are environmentally sustainable and possess inherent biocompatibility. 256 Biopolymers are produced through enzymatic mechanisms within the cytoplasm, as well as within different cellular compartments or organelles. Additionally, they can be synthesized at the cytoplasmic membrane or components of the cell wall. In some cases, biopolymer synthesis can take place on the surface of cells or even outside of the cell. Despite the multitude of advantages they possess, the development of biopolymer-based soft actuators has faced some limitations, mostly attributed to obstacles such as the low ionic conductivity of biopolymers, the complexity of processing to attain required functions, and inadequate mechanical stiffness. 257
The study conducted by Wang et al. (2020) explored a bionic actuator system that incorporates silk-elastin-like protein hydrogels and cellulose nanofibers generated from wood. 258 This system exhibited responsive behavior to changes in temperature and ionic strength when submerged underwater, employing environmentally friendly techniques. The system can undergo programming and may be manipulated into various 3D origami shapes. Furthermore, a quantitative assessment was conducted to measure its reversible deformation performance. The potential applications of this biocompatible and biodegradable actuator encompass in vivo biomedicine and soft robotics.
The utilization of an electrospun silk membrane covered with sulfonated chitosan, as demonstrated in a study conducted by Kim (2023), enabled the realization of high-performance ionic biopolymer actuators. 257 This membrane, characterized by its interdigitated structures, exhibited stable mechanical and electrochemical capabilities. The incorporation of sulfonated chitosan-ionic liquid into electrospun silk fibers led to a reduction in mechanical stiffness and an enhancement in ionic conductivity. This, in turn, facilitated the formation of ion routes within the interdigitated silk-chitosan domain. The bending performance of ionic electrospun silk-sulfonated chitosan actuators with graphene-Poly(3,4-ethylenedioxythiophene)-poly(styrenesulfonate) (PEDOT:PSS) electrodes is observed to enhance by 165% when compared to actuators with simply PEDOT:PSS electrodes, when tested on a bare electrospun silk membrane. The biopolymer actuator that was created exhibited significant enhancements in actuation performance, making it a potentially favorable option for integration into skin-attachable and biomedical devices.
The research conducted by Manikandan et al. (2021) introduced a novel type of soft biopolymer film derived from Bombyx mori silk, which exhibits complete reversibility under the influence of moisture. 221 The aforementioned films exhibited rapid response times of less than one second and demonstrated exceptional durability, even when subjected to a continuous actuation cycle exceeding one thousand repetitions. The film exhibited an impressive capacity for weight-lifting, as even minute quantities of water can generate a substantial amount of power. The possible applications of silk fibroin-based soft actuators encompass intelligent textile layers and autonomous crawlers. The rapid actuation process can be initiated by the presence of human palm moisture. The silk films are produced by a straightforward solution-casting method.
The study by Sun et al. (2019) introduced a novel soft actuator composed of a renewable and biocompatible nanocomposite. 220 This nanocomposite is comprised of a highly conductive material called polyaniline, combined with an electrolyte derived from a natural biopolymer known as cellulose. The device exhibited significant deformability, exceptional flexibility, efficient airflow capabilities, and robust muscular characteristics. By altering the concentration of polyaniline and adjusting the pH level, it was possible to achieve significant displacement and bending force under a 5VDC voltage. The exceptional conductivity, flexibility, and porosity characteristics exhibited by the nanocomposite electrode offer significant potential for advancing research on high-performance renewable biocompatible soft actuators.
Dielectric elastomers
Dielectric elastomers are a class of flexible electroactive materials that undergo deformation in response to external electrical stimuli, hence enabling the manifestation of mechanical functionalities. 259 Dielectric elastomers (DEs) exhibit considerable potential for application in the field of soft actuators, primarily owing to their notable characteristics such as substantial deformability, high energy density, rapid response times, lightweight composition, and cost-effectiveness. 161 Additionally, there exist materials capable of generating motion that exhibit similar force, strain, and actuation pressure/density characteristics to human muscle. These materials present a cost-effective alternative to other competing options. Dielectric elastomer actuators (DEAs) are composed of thin polymer sheets that are covered with compliant electrodes. The application of a voltage difference to the actuator results in the generation of electrostatic pressure, which leads to compression in the thickness direction. This compression causes an expansion in the plane of the actuator due to the incompressibility of dielectric elastomers. According to Pelrine et al., 16 the operational principle referred to as electrostatic deformation involves the compression of a membrane through the application of an electric field, which occurs as a result of opposite charges flowing through an external conducting wire. This phenomenon leads to an expansion in the two-dimensional surface of the membrane, thereby turning electrical energy into mechanical energy and serving as the mechanism for actuation. This is due to the fact that dielectric elastomers possess the property of being incompressible. According to Bozlar et al. (2012) report, a significant determinant of the effectiveness of DE actuators is the composition of the electrodes. 260 To provide unimpeded actuation, it is imperative that the electrodes possess enough electrical conductivity and a low elastic modulus.
Bauer et al. (2014) established that there is a requirement for dielectric elastomer materials that possess a diverse array of elastic moduli, alongside exceedingly low viscosity and electrical conductivity . 261 Additionally, these materials should exhibit high dielectric constant and breakdown strength. Acrylics, Polyurethanes (PUs), and silicones are widely utilized elastomers in many applications. PU films exhibit greater force outputs and higher dielectric constants, rendering them well-suited for the actuation of DE at reduced electric fields. Nevertheless, these materials exhibit certain constraints as minimal strain. According to the findings of Kornbluh et al. (2002a) and Li et al. (2013), acrylics, namely those utilizing the commercially available 3M VHB acrylic elastomer, have demonstrated the ability to attain significant voltage-induced linear strains and area strains exceeding 380% and 1000% respectively.262,263 However, as stated by Chiang Foo et al. (2012), these materials demonstrated significant viscoelastic nonlinearities that can potentially impact the performance of actuators if the effects of viscoelasticity are not adequately considered. 264 DE actuators utilizing silicone elastomers exhibit a moderate level of actuation strain, surpassing that of DEAs employing polyurethanes (PUs) but falling short of the strain shown in acrylic-based DEAs. According to Brochu et al. (2010b), Silicones have a lower level of viscoelasticity compared to acrylics. 97 Additionally, silicones can function at higher frequencies while experiencing fewer losses. These materials exhibit a comparatively low dielectric constant, necessitating the use of greater electric fields to induce significant stresses.
DEs, renowned for their significant planar strain, have been incorporated into actuators in diverse arrangements such as spherical, stack, bending, and rolled forms, as documented by.265,266 Various models grounded in the principles of nonequilibrium thermodynamics were put out and subsequently examined by Zhao et al. 267 Bozlar and colleagues conducted a study on all-polymeric actuators that utilized composite elastomer electrodes with a “solid” structure. 260 This approach aimed to address the disadvantages commonly associated with conventional electrodes, such as inadequate structural stability and low electrical conductivity. Shi et al. (2018) reported the discovery of a novel dielectric gel composed of polymers, which exhibited remarkable characteristics like an ultra-high dielectric constant, low elastic modulus, and exceptional transparency. 268 The gel was made utilizing liquids with exceptionally high dielectric constants and a polymer network, demonstrating notable stretchability and minimal mechanical hysteresis. Additionally, the gel exhibited a bioinspired lens that can be adjusted.
Gonzalez et al. (2019) examined the electromechanical analysis of flexible dielectric films produced by additive manufacturing techniques for potential use as actuators in dielectric elastomer actuators (DEAP). 269 The analysis focused on factors such as dielectric constant, radial elongation, tensile characteristics, pre-strain influence, surface topography, and actuation behavior under high voltage conditions. Their results showed a notable dielectric constant and favorable elongation performance, making the material suitable for DEAP actuators. In addition, the controllability of tensile characteristics is influenced by the printing angle and thickness of the samples, allowing 3D printing technology manipulation. Surface topography analysis helped identify preferred deformation paths. Actuators fabricated using concentric circular trajectories showed uniform area growth of 4.73% in all directions.
The study by Zhou et al. (2019b) devised an innovative methodology for the creation and construction of a dielectric elastomer (DE) actuator, which incorporates 3D-printed flexible components.
163
This approach showcased substantial deformations and a range of capabilities, as depicted in Figure 17(a). Their methodology enabled the integration of intricate soft structures onto the DE membrane, without the need for additional adhesive substances. In their study, they manufactured and assessed a soft gripper using a DE actuator. The gripper’s performance was evaluated in terms of its bending angle and blocked force. Furthermore, they utilized finite element method (FEM) simulations, as depicted in Figure 17(b), to accurately forecast the electromechanical characteristics, hence guiding the development of the soft actuator. Moreover, with the implementation of an optimal design, the finger-like soft actuator developed is capable of generating substantial actuation, with a bending angle of approximately 128°. In addition, they developed a novel four-fingered soft gripper, as depicted in Figure 17(c). This gripper utilizes four finger-actuators and they demonstrated the ability to successfully hold a polyfoam cube weighing 2 g. The study guide focused on the construction and modeling of DE actuators that possessed high designability and customization. These actuators show great potential in several fields including soft robotics, flexible electronics, and medical devices. (a) A schematic of a flexing DEMES actuator, demonstrating the various layers that make up the actuator, the soft gripper’s fabrication steps, the printing of an elastic frame on the membrane using fused deposition modeling, and a DEMES soft gripper in its flexed state when no voltage is applied. (b) FEM-simulated results of the actuator at varied applied voltages exhibiting bending states, bending angle, and blocked force. (c) The cube is held securely in place by the soft gripper.
163
Reproduced with permission, license number: 5747450573713.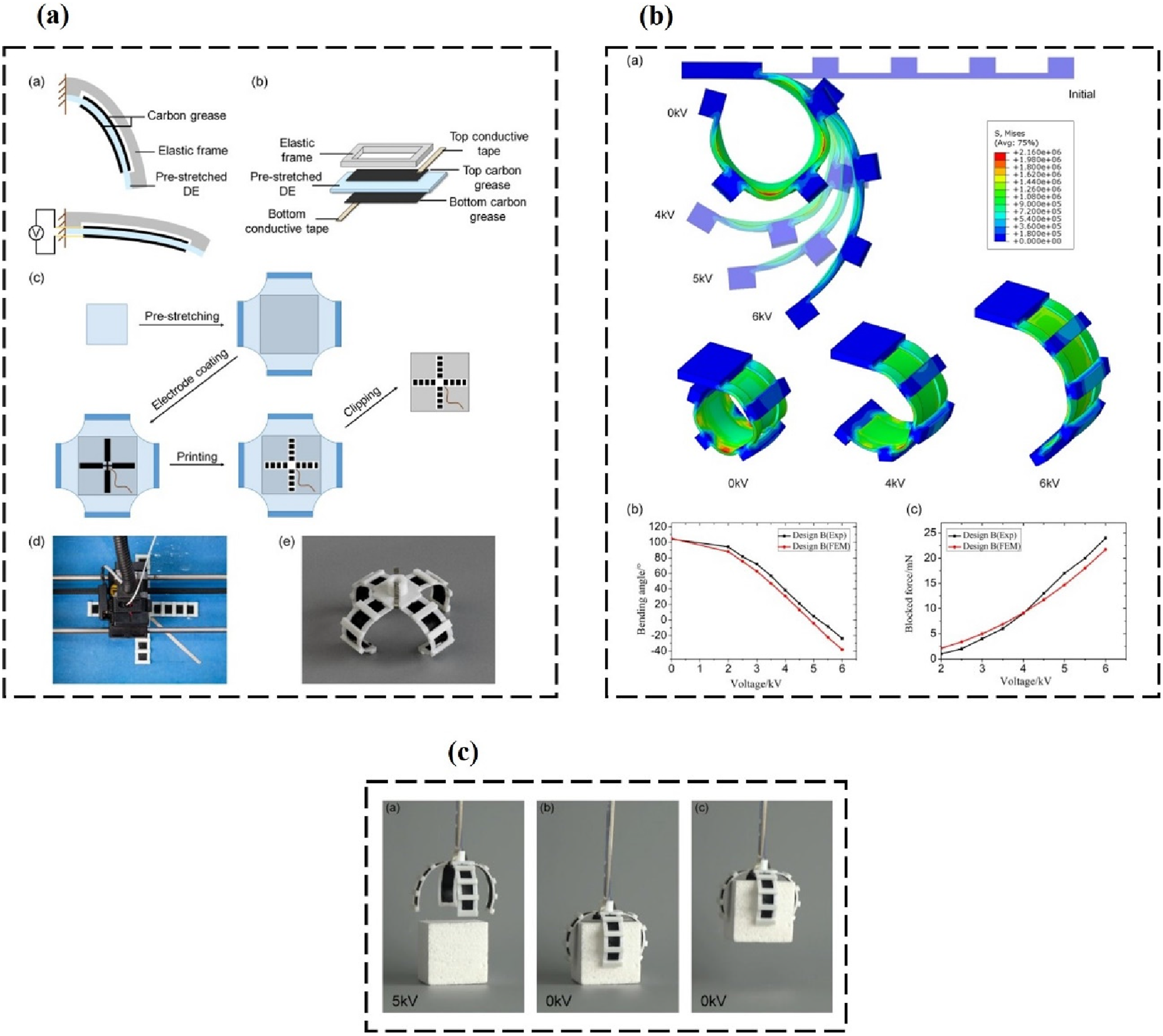
A significant concern with many synthetic actuating materials is their slow response time. Only elastomers and ferroelectric polymers provide rapid actuation, making them suitable for practical applications in locomotion. Other materials exhibit slower movement and are better suited for the application, provided that shape modification is infrequent. To enhance the actuation rate, there are two main strategies: reducing the size of the object to enable faster heating or cooling or swelling, or utilizing elastic instabilities such as snap buckling. The consistency and accuracy of the motion of synthetic materials are additional significant concerns. The precision of the movement is constrained by two factors. Firstly, the rapidity of the relaxation process, which is a sluggish process that delays the restoration of the initial shape. Secondly, creep is an irreversible plastic deformation that gets more severe at higher temperatures.
Fabrication methods of soft actuators
The fabrication of soft actuators presents unique challenges and requires specialized methods to create structures that can undergo large deformations while maintaining their functionality. This section explores various fabrication methods employed to create soft actuators, including molding and casting, 3D printing, electrospinning, laser machining, and photolithography. Each method offers distinct advantages and allows researchers and engineers to design and produce soft actuators with tailored properties to suit specific applications. By understanding these fabrication techniques, we can unlock the potential of soft actuators and further advance the field of soft robotics and related technologies.
3D printing
Additive manufacturing, specifically 3D printing, is increasingly used to fabricate soft actuators with complex geometries and internal structures. Specialized 3D printers capable of handling soft materials, such as hydrogels and elastomers, are used in this process. Layer-by-layer printing allows for precise control over the actuator’s structure, enabling the integration of multiple materials and functionalities.
In light of the need for printable materials that possess suitable mechanical properties for actuation, the materials most frequently utilized are thermoplastic polyurethane (PU)-based polymers, 270 hydrogels,271,272 and silicone-based polymers. 273 However, when it comes to 3D printing soft actuators, choosing the right materials is crucial for attaining the best possible performance. One of the main factors to examine is the material’s level of flexibility and elasticity. 274 These qualities are crucial for facilitating the desired deformations and shape changes in soft actuators as they produce flexible motion. 275 Furthermore, the biocompatibility of the material could play a crucial role, particularly if the soft actuators are intended for medical or wearable applications. Biocompatible materials guarantee that the actuator can safely interact with biological tissues without eliciting any negative responses. One must also take into account the simplicity of 3D printing and the suitability of the material for commonly used 3D printing technologies. Certain materials may possess distinct prerequisites or constraints during the printing procedure, which can impact the practicability of fabricating sophisticated soft actuators with complex designs. Materials such as elastomers, flexible/elastic materials, and SMPs can be readily processed and printed with precise parameters using standard procedures.276,277 However, in the case of smart composites like magnetorheological fluid, it is necessary to apply an external magnetic field to the ink’s flow direction using either a permanent magnet or an electromagnetic coil placed around the dispensing nozzle. This is done to give the extruded ink a permanent magnetic moment. 136 To print various materials at the same time, it is necessary to have numerous extruders or printing heads. 278
Moreover, mechanical characteristics, such as the capacity to withstand tension and resist tearing, are essential factors in defining the overall robustness and longevity of the soft actuator.279,280 By selecting materials with suitable mechanical qualities, one may ensure that the actuator is capable of enduring the stresses and environmental conditions it may face during its intended application. It is important to consider the pricing and availability of the selected 3D printing material, particularly for large-scale manufacturing or projects with limited budgetary resources. By carefully considering these characteristics, it will be possible to choose a material that is in line with the specific requirements and goals of 3D printing soft actuators. The research by Goh G. L. et al. 281 presented the design and fabrication of 3D-printed soft robotic grippers with variable stiffness. Their soft actuators were capable of handling delicate objects while maintaining a secure grip due to their tunable stiffness. Haghiashtiani G. et al. (2018) focused on the 3D printing of electroactive hydrogel actuators using a multi-material approach. Their study demonstrated the ability to incorporate conductive materials within hydrogel structures for electrical actuation. 282 Also, the research by Tolley M. T. et al. (2014) presented a novel fabrication method for soft robots using 3D printing to create origami-inspired structures. 283 The study showcased the potential of 3D printing in developing soft actuators with unique shapes and functionalities. Challenges that remain in the 3D printing of soft actuators include developing materials for printing soft robotics devices without post-printing assembly. Also, further development is needed for multi-material printing and embedded electronics. 284
Photolithography
Photolithography, commonly used in microfabrication, can be adapted for soft actuator fabrication. A photosensitive material is exposed to ultraviolet light through a mask, and the exposed areas undergo a chemical change, resulting in patterned soft structures. This method is suitable for creating micro-scale soft actuators or integrating soft components into larger systems. Photolithography involves depositing a photoresist film on a substrate, revealing the sample through a UV-patterned mask. Photochemical actions transfer the mask’s pattern onto the resist, resulting in a predesigned photoresist film. This technology was utilized in the work done by Kim et al. (2018) to build intricate patterns with great resolution ranging from microscales to sub-100 nm scale. 285
Electrospinning
Electrospinning is a technique used to fabricate soft actuators with nanofiber-based structures. A polymer solution is subjected to an electric field, leading to the formation of nanofibers that are collected to create the actuator. The resulting nanofiber structure provides a high surface area and unique properties suitable for certain soft actuator applications. 286 An et al. (2014) presented a hybrid structure composed of metallic nanofibers and graphene to create stretchable and transparent electrodes. 287 The fabrication method involved the integration of metallic nanofibers into a transparent graphene matrix. The metallic nanofibers provided excellent electrical conductivity, while the graphene matrix contributed to the transparency and flexibility of the electrodes. This hybrid structure resulted in electrodes that can withstand large deformations without compromising their electrical performance. He Q. et al. (2021) conducted a study on soft actuators constructed from electrospun liquid crystal elastomer microfiber. 288 The nanofibers show responsive behavior to changes in temperature, resulting in the actuator’s-actuator’s controlled motion. The research highlighted the potential of electrospun nanofibers in developing thermoresponsive soft actuators. D’Anniballe et al. (2021) focused on electrospinning conductive polyaniline/polyurethane fibers to fabricate soft actuators with enhanced electromechanical properties. 289 The integration of conductive nanofibers enables electrical actuation in the soft actuator, making it suitable for various applications in soft robotics and biomedical devices.
Laser machining
Laser machining, a precision manufacturing technique, has played a significant role in advancing the fabrication of versatile soft actuators. Leveraging the non-contact nature of laser beams, this method allows for intricate and customized designs on soft materials, enabling the fabrication of precise and complex actuator structures. High-precision lasers are used to cut or etch patterns and channels in soft materials to control their deformation behavior. Amiri Moghadam et al. (2018) presented a novel approach to address the challenges faced by bulky and time-consuming pneumatically actuated soft robots. They introduced a design and manufacturing method using a laser-cutting machine to create ultrathin soft robots and actuators (∼70 μm) from thermoplastic polyurethane (TPU) sheets based on 2D CAD drawings. They successfully fabricated five different soft actuators capable of bending, rotating, and contracting with both planar and nonplanar motions. By stacking multiple TPU sheets, the method enabled the rapid production of multifunctional actuators. The researchers also demonstrate the fabrication of a portable four-arm swimming robot without any assembly steps. This rapid fabrication technique allows soft robots to become operational within minutes, creating a new subclass of soft robots that are ultrathin, lightweight, and suitable for applications requiring compact and delicate interfacing capabilities.
Molding and casting
Molding and casting are fundamental fabrication methods widely used in the development of soft actuators for various applications. Soft actuators, known for their flexibility and deformability, require materials that can undergo substantial strain while maintaining their functionality. This fabrication method allows the creation of complex soft actuator structures with precision and consistency. By pouring or injecting liquid or gel-like materials into custom molds, the molding and casting process enables the production of soft actuators with tailored shapes and properties. A silicone elastomer pre-mixture is applied onto a pre-determined mold, subsequently subjected to either heat or allowed to cure, and eventually detached to yield a film that accurately reproduces the mold’s shape. 290 In the study by Shepherd et al. (2011), the researchers focused on developing a versatile soft robot that can achieve different types of locomotion by integrating multiple actuators with varying properties. 291 The fabrication process involved using elastomeric materials, such as silicone rubber, to create the soft actuators. The molding and casting method enabled the researchers to produce complex and flexible structures, which are crucial for the robot’s diverse locomotion capabilities. Martinez et al. (2012) presented a novel concept of combining paper and elastomeric materials to create pneumatic actuators with programmable motion. 290 In their study, they utilized the casting fabrication method by casting liquid elastomer around the folded paper, resulting in a composite material that exhibits both flexibility and rigidity.
Fabricating soft actuators poses a number of challenges across various methods. Material selection and compatibility are crucial, especially in 3D printing, where appropriate mechanical qualities such as flexibility, and elasticity are required. Furthermore, overcoming the necessity for post-printing assembly and enhancing multi-material printing capabilities are critical issues. Achieving ideal mechanical properties and endurance is essential for the longevity and dependability of soft actuators, demanding advances in material science. Photolithography problems focus on achieving high resolution and precision, which are required for generating detailed patterns on soft structures. Similarly, maintaining uniformity and control in electrospinning presents challenges in producing consistent nanofiber-based structures. Meanwhile, laser machining struggles to strike a balance between design flexibility and complexity when producing precision soft actuators. Finally, achieving precision and consistency in the molding and casting processes is critical for producing complicated soft actuator components with reliability. Overcoming these challenges requires interdisciplinary collaboration and continued advancements in materials science and engineering to unlock the full potential of soft actuators across various industries and applications.
Applications of soft actuators
The advent of smart materials soft actuators has brought about a significant transformation by facilitating the creation of systems that are compliant and adaptable. The employment of conventional inflexible actuators is restricted in their ability to engage with intricate and unstructured environments, manipulate fragile entities, or cooperate with individuals. Soft actuators made of smart materials present a promising solution due to their capacity to imitate natural movements, ensure safe interactions, and display versatile behavior.
Biomedical applications
The utilization of smart materials, specifically soft actuators, has garnered considerable interest in the field of biomedical applications owing to their capacity to replicate the motion and functionality exhibited by natural tissues. Soft actuators can generate intricate and precise movements by employing stimuli-responsive materials that can undergo reversible alterations in shape or size when subjected to external triggers. The distinctive attribute of these entities renders them exceptionally well-suited for a wide range of biomedical applications, encompassing drug delivery systems, tissue engineering, prosthetics, and surgical robots.
In tissue engineering, the primary objective is to overcome the drawbacks of conventional methods for replacing tissue and organs, such as organ transplantation, which is frequently constrained by the lack of available organs, immunological rejection, and the requirement for permanent immunosuppression. By developing live tissues or organs aimed at restoring normal tissue function, and enhancing the quality of life, tissue engineering seeks to offer substitute treatments. Soft actuators play a crucial role in creating biomimetic constructs that can replicate the mechanical behavior of natural tissues. By incorporating soft actuators into tissue scaffolds, researchers can mimic the dynamic properties of native tissues, enabling the development of functional engineered organs and tissues. The ability of soft actuators to undergo reversible shape changes allows them to provide mechanical stimuli, promoting cell growth, differentiation, and tissue remodeling.
292
The construction of a self-forming multichannel nerve guidance conduit with topographical cues was undertaken in a study that utilized the intelligent responsive shaping process observed in shape memory polymers by.
293
In their study, the conduit was built using a degradable shape memory PLATMC polymer. As shown in Figure 18(a), the electrospun shape memory nanofibrous mat temporarily transformed into a planar shape through a high-temperature molding process, allowing for the uniform distribution of cells during cell loading. In addition, upon being stimulated by a physical temperature of approximately 37 °C, the material can autonomously revert to its original tubular structure, thereby reestablishing the multichannel conduit. This study showed that multichannel conduit demonstrated superior performance in terms of cellular proliferation and the regeneration of rat sciatic nerve injuries. The researchers Zhao et al. (2018) devised a solution to address the challenges of tissue scarcity and immune rejection in the treatment of vascular diseases.
294
They developed an artificial vascular graft using poly (lactide-co-trimethylene carbonate) (PLATMC). Initially, human umbilical vein endothelial cells were haphazardly distributed onto the functionalized nanofiber layer of a two-dimensional scaffold and subsequently affixed to the scaffold at ambient temperature. Subsequently, the scaffold was introduced into a 37°C incubator, facilitating cellular proliferation and differentiation while the film underwent curling. Ultimately, the endothelial cells exhibited a uniform distribution along the inner surface of the three-dimensional scaffold because the film substrate regained its original tubular shape at the glass transition temperature (Tg). Their study introduced a novel concept for the fabrication of sophisticated vascular grafts. Tissue engineering uses porous scaffolds for tissue regeneration, but these may not fully mimic native tissues’ dynamic properties. 3D and 4D printed smart biomaterial have emerged for more accurate mimicry. Recent advances on this were conducted in Ref. 295–297 The applications of soft actuators in the biomedical sector. (a) The process of cell seeding and the expansion of SCs in several channels. Reproduced with permission.
293
(b) Body-powered actuator.
299
Reproduced under Creative Commons CC BY. (c) Encapsulation thermoresponsive self-folding capsules. Reproduced with permission.
302

Prosthetics is another area where soft actuators find extensive application. Traditional prosthetic devices cannot often mimic the natural movements and functionalities of human limbs. Soft actuators, on the other hand, offer the potential for more natural and adaptive prosthetics. By integrating soft actuators into artificial limbs, researchers can develop prosthetic systems that can respond to the user’s intentions and provide more precise and versatile control over movements. Jin-Huat Low et al. (2015) showed a flexible finger actuator that is lightweight and can be grasped gently without strain. 298 They demonstrated the potential for using these soft finger actuators in orthotic devices for hand and, hand rehabilitation. Furthermore, they also showed that it could be integrated into a robotic arm as a gripping device, with potential future use in prosthetic hands.
Kandasamy et al. (2022) created a soft robotic actuator that uses body motions to imitate the function of human fingers for gripping and grasping activities. 299 In contrast to the commonly employed chamber-based actuation, their work used actuators constructed of elastomers incorporated with fiber braiding. The bending angle and force generated by the actuators were heavily impacted by the elastomer Young’s modulus and the braiding angles of the fiber. The bending and force profiles of these actuators were studied in their experiment by altering different combinations of elastomeric materials and braiding angles to correspond with hand manipulation activities. They also discovered that using water as the actuation fluid made it easier to operate the actuators using body motions. As shown in Figure 18(b), they exhibited a body-powered actuator configuration that may give patients mobility, independent capabilities, and cost-effectiveness, possibly allowing them to be employed in a variety of applications.
Soft actuators have shown potential in surgical robots, allowing for minimally invasive treatments and improving surgical skills. Soft robotic systems with soft actuators are useful for delicate surgical operations because they can navigate through complicated anatomical structures, exert mild stresses, and adapt to uneven surfaces. The research led by Tommaso Ranzani recommended a fundamental change in surgical instrument design to overcome the rigidity in natural orifice transluminal surgery: beyond rigid tools to an innovative concept of soft and stiffness-controllable instruments. 300 The octopus was used as a model in their research towards constructing such soft and stiffness-controlled medical devices. Furthermore, they demonstrated how certain technologies may be used in the design of a novel manipulator for flexible surgery by explaining its potential and showing feasibility testing of a prototype responding to this new design philosophy.
Soft actuators made of smart materials have shown promise in precise drug delivery. They can be designed to release medicine at precise locations inside the body in response to specified triggers such as pH or temperature changes. Given the possibility of structural and functional damage to cells and therapeutic agents during the delivery process, effective carriers must be developed. Biodegradable thermoresponsive self-folding capsules capable of regulated capture and release of cells were designed in the study by Stoychev et al. (2011). 301 In their study, star-shaped bilayers made of biodegradable polycaprolactone (PCL) and thermal-responsive PNIPAM-(4-acryloyl benzophenone) hydrogels were investigated as potential delivery carriers. They demonstrated reversible encapsulation and release of yeast cells in response to temperature stimuli. In addition, the bending/unbending deformation of the 4 m-thick polymer bilayer could be completed in 5-10 s.
In recent studies, Kobayashi et al. (2019) presented a heat-sensitive gripper doped with magnetic nanoparticles. 302 As illustrated in Figure 18(c), under external magnetic control, it could migrate to the desired location and deliver the loaded medications at body temperature (37 °C). More critically, it may decompose and vanish at this temperature due to disulfide bond breakage by reduction. Similarly, stimuli-responsive that could grasp the tissue upon deformation and release medications from their porous scaffolds were designed based on the particular range of pH and temperature within the gastrointestinal tracts by Bassik and colleagues. 303
A novel sensor was developed to identify nucleic acids using surface plasmon resonance technology. 304 The detection of target sequences inside genomic DNA was achieved by utilizing a graphdiyne film layer and a catalytically deactivated CRISPR-associated protein 9 (dCas9). The sensor was able to evaluate recombinant plasmids with a high level of sensitivity, allowing it to detect clinical samples from individuals diagnosed with Duchenne muscular dystrophy. In the study by, 305 clustered regularly interspaced short palindromic repeat CRISPR) Cas12a-system-empowered surface plasmon resonance gene-detecting platform that combined optical sensing technology with the ‘gene scissors' CRISPR technique. It analyzed viral RNA within 38 min, with a limit of detection of 15 fM. Also, a rapid ultrasensitive electrochemical biosensor was developed for early diagnosis and early differentiation of SARS-CoV-2 variants. 306 The sensor used MXene-AuNP electrodes and the CRISPR/Cas13a system, providing a valuable supplement to the RT-qPCR method.
Although there has been significant progress in the development of soft actuators for biomedical applications, there are still opportunities for further advancement in these materials in the following areas. It is imperative to enhance the precision of the three-dimensional deformations of soft actuators when subjected to external stimuli, as well as optimize the effectiveness of executing intricate movements that imitate animal motion. Developing a thorough theoretical framework could guide designing the soft actuators. Therefore, it is crucial to integrate advanced techniques in molecular design, chemical synthesis, and microfabrication technology to create innovative functional materials. Additionally, incorporating sophisticated structural design is essential for constructing flexible smart devices capable of achieving precise 3D reconfiguration and highly efficient maneuverable locomotion. To accomplish these objectives, it is necessary to engage in interdisciplinary collaboration involving mathematics, chemistry, material science, biology, and microelectromechanical processing.
Applications in soft robotics
Soft robotics has emerged as a revolutionary field in robotics, offering the potential to create machines with unique capabilities and unprecedented interaction with their environment. Central to the success of soft robots are smart materials that act as soft actuators, enabling flexible and compliant movements. These smart materials possess inherent properties that respond to external stimuli, such as heat, electricity, or magnetic fields, to produce controlled motion and deformation. As a result, soft actuators made from smart materials have found numerous applications in soft robots across various industries and research domains. In this exploration, we delve into the diverse and innovative applications of smart material-based soft actuators, showcasing their potential to revolutionize robotics.
Suzumori et al. (1991) described the development of a pneumatically driven rubber hand, which utilizes flexible microactuators, and its integration into a robot hand system.
307
Their study provided valuable insights into the early development of compliant and flexible robotic hand systems driven by pneumatic actuators. Polygerinos et al. (2015) presented a soft robotic glove developed as a portable and assistive device to aid in hand rehabilitation for individuals with functional grasp pathologies as shown in Figure 19(a).
308
Their robotic glove utilizes soft actuators, which are made of molded elastomeric chambers with fiber reinforcements. These actuators induced specific bending, twisting, and extending trajectories when pressurized with fluid. In addition, their soft robotic glove showcased promising potential in assisting individuals through its compact waist belt pack and open palm design, the soft robotic glove boosted user flexibility and independence. The study by Yuk et al. (2017) presented a novel approach to creating camouflaged underwater robotic systems using hydraulic hydrogel actuators.
46
The study explored both optical and sonic camouflage strategies and demonstrated the potential for these camouflaged soft robots in various underwater applications as shown in Figure 19(b). Mosadegh et al. (2014) discussed a novel pneu-net design that minimizes the quantity of gas required for pneu-net inflation and hence boosts the speed of actuation.
309
Their study focused on the development of pneumatic networks for soft robotics that exhibit rapid actuation. This design for soft robotic actuators combined fast rates of actuation with good actuator dependability, opening up new applications. The applications of soft actuators in soft robots. (a) The prototyped soft and lightweight robotic hand assistive device .
308
Reproduced with permission, license number: 5747471440642. (b) Various applications of naturally camouflaged hydrogel actuators and robots.
46
Reproduced under Creative Commons CC BY license. (c) Fabrication of 3D tentacles.
310
Reproduced under Creative Commons CC BY license. (d) Fully soft, autonomous robot assembly.
311
Reproduced with permission, license number: 5747480442104.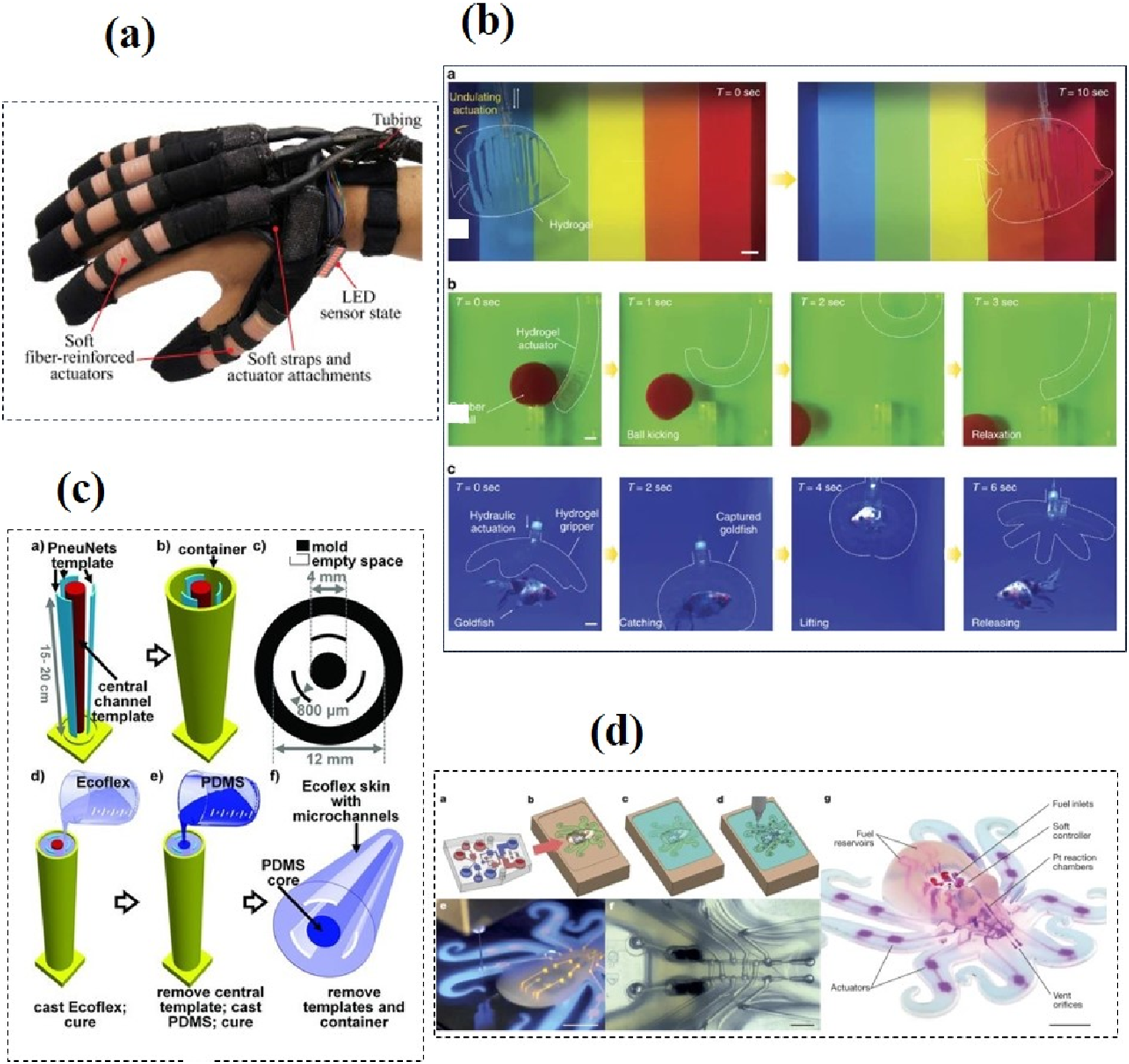
In another study, Martinez et al. (2013) focused on the development of robotic tentacles using flexible elastomers as the key material for achieving three-dimensional mobility as illustrated in Figure 19(c). 310 The researchers aimed and created soft robotic tentacles showcasing the adaptability and dexterity of the soft robotic structures. As shown in Figure 19(d), Wehner’s research team developed soft autonomous robots entirely made from smart materials and soft actuators. 311 Their robots carried out complex movements without rigid components, showcasing the potential of smart materials in soft robot designs. Shepherd et al. (2011) conducted a study on soft robots with smart material-based actuators that can exhibit multiple gaits, including crawling, walking, and swimming. 291 In their studies, soft lithography was utilized to fabricate a pneumatically actuated robot capable of sophisticated locomotion. Their soft robot’s flexible actuators allowed for versatile locomotion.
Self-actuating materials, which react to external stimuli like light, temperature, or electric fields, have demonstrated promise in soft robotics applications. However, they still have certain limitations that must be addressed. For example, electrically responsive actuators typically require a connection to rigid energy sources. Shape memory polymers and shape memory alloys need to be manually reprogrammed for repetitive actuation. Multi-layer materials that undergo differential growth are expensive. On the other hand, soft actuators based on dielectric elastomer actuators currently require high driving voltages, which raises safety concerns when embedding DEAs in soft robots. Therefore, for soft actuators based on dielectric elastomer actuators to be a feasible solution for many applications, it is imperative to decrease the driving voltage. Furthermore, the utilization of hydrogel-based actuators necessitates their integration with pneumatic systems to produce rapid and substantial forces. Creating unrestricted soft robots capable of performing intricate tasks remains a formidable challenge. Soft robots that utilize pneumatic actuation typically undergo significant deformations across their whole structural frame. Predicting the motion of these systems is challenging because it requires nonlinear elastic models that can satisfy a wide range of boundary conditions.
Future prospects
In recent years, smart materials flexible actuators have attracted considerable interest due to their potential applications in numerous fields, including robotics, biomedical devices, and adaptive structures. In terms of performance, continued research and development activities will increase the performance of smart materials and soft actuators. Higher actuation stresses, faster reaction times, longer fatigue life, and greater controllability are all possible. Material science and engineering advances will be critical in attaining these advancements. In addition, future soft actuators are anticipated to have multifunctional qualities, allowing them to execute numerous functions at the same time. Materials that can actuate and detect at the same time, for example, or actuators that can deliver both mechanical force and electrical conductivity. This versatility will expand their range of applications. Nature-inspired design ideas have shown considerable promise for producing superior soft actuators. Mimicking biological structures and systems, like muscles and tendons, can result in actuators that are more flexible, adaptable, and dexterous. Bioinspired designs will most likely be investigated further to create more efficient and adaptable soft actuators. Furthermore, there is enormous potential in integrating soft actuators with artificial intelligence (AI) and robotics technology. AI algorithms may be used to optimize control tactics, adapt to changing situations, and learn from experience. Soft actuators can be used in soft robotics, prosthetics, exoskeletons, and other areas where compliance and safety are critical. Finally, as the area of smart materials and soft actuators advances, the emphasis will shift to commercialization and real-world applications. Identifying and creating practical applications in fields like healthcare, automation, and human-machine interaction will be critical for these technologies' mainstream acceptance.
Conclusions
The study of smart materials soft actuators has become a captivating area of investigation that holds significant promise for technological progress. The implementation of a variety of intelligent materials in these actuators, such as shape memory polymers, hydrogels, liquid crystal elastomers, and electroactive polymers, provides distinctive functionalities and reactions to exogenous factors. Soft actuators can demonstrate significant alterations in their shape, size, and mechanical characteristics by utilizing the properties of these materials, thereby facilitating a diverse array of potential applications.
This paper delved into the actuating mechanisms, materials, and fabrication techniques, and explored applications of soft actuators. The advantages of these materials have been explored, including their compliance, lightweight properties, and adaptability, rendering them highly suitable for use in various applications such as in soft robotics, and biomedical devices.
Prospectively, the domain of smart materials soft actuators exhibits substantial potential. The current investigations into multi-responsive materials, self-healing actuators, and bio-inspired designs exhibit significant potential for future progressions. The amalgamation of diverse stimuli-responsive materials and the advancement of intelligent control systems will facilitate the creation of more intricate and adaptable soft actuators.
The potential transformative impact of soft actuators on various fields is anticipated as researchers continue to delve into and enhance their capabilities. The implementation of these actuators holds the promise of transforming various technological fields such as robotics and healthcare through the introduction of innovative approaches to motion, manipulation, and adaptability.
The information presented in this paper emphasizes the importance of soft actuators utilizing smart materials as a leading area of study. Beyond the synthesis of existing knowledge, it highlights the merging of intelligent material properties with gentle actuation principles, paving the path for new engineering and technological advances. By investigating organisms' ability to respond to environmental stimuli and show complex motions, it provides a forward-looking perspective on the creation of intelligent and adaptive systems adapted to the needs of our dynamic society.
Footnotes
Acknowledgements
The listed author(s) are thankful to their representative universities for providing the literature services. They are also thankful to Andrews Yaw Minkah and Priscilla Adomako Gyasi for their support during the writing and review of this study.
Author contributions
Michael Enyan: Conceptualization, Investigation, Data curation, Resources, Validation, Formal analysis, Writing – original draft, Writing – review & editing, Resources. Zhang Bing: Formal analysis, Conceptualization, Writing – review & editing, Resources. Jesse Nii Okai Amu-Darko: Writing – original draft, Formal analysis, Writing – review & editing. Eliasu Issaka: Writing – original draft. Samuel Leumas Otoo: Resources, Methodology, Data curation, Writing – review & editing. Michael Freduah Agyemang: Resources, Writing – review & editing.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data Availability Statement
Data will be made available on request.