
Abstract
A new penetration equation for ballistic limit analysis (BLA) of a projectile–target pair is developed and presented. A critical review of the classic BLA (CBLA) has identified that the CBLA penetration equations do not satisfy the conservation of momentum and energy principles simultaneously and completely. It has also been found that the classic definition of residual velocity of the projectile does not quantify the instantaneous rigid body velocity of the projectile at ballistic limit. A new definition of the projectile relative velocity with respect to the target in contact (and in motion) is defined, and this new definition is used to define the projectile instantaneous velocity at ballistic limit. With this new definition of the projectile instantaneous velocity, the new penetration equation is derived satisfying both the conservation of momentum and energy principles simultaneously. A general functional form of the new penetration equation is used in analyzing experimental data and the results are found to match well with the experiments. The new equation is shown to be able to explain projectile residual velocity at and around ballistic limit, can predict the jump velocity at ballistic limit (if any), and is applicable to experimental ballistic data of a wide range of thin and thick targets. The present work sets the background for further development of theoretical penetration models incorporating material properties and parameters of the projectile–target pair.
Introduction
Four articles by Recht and Ipson, 1 Giere, 2 Ipson and Recht, 3 and Lambert and Jonas 4 are considered classic on the ballistic limit analysis (BLA) of a projectile–target pair under high velocity impact conditions. We define the penetration theories developed therein as the “Classic Ballistic Limit Analysis” (CBLA) theories. None of the CBLA theories completely satisfies the conservation of momentum and energy principles simultaneously, and have been subject to critical reviews, 4 –8 including the critical comments of Lambert and Jonas 4 on the earlier developments. In CBLA theories, the transfer of momentum and energies to the bulk target have been identified, but not considered completely in the final form of the penetration equations, and are the main reason for discrepancies in those equations. In addition, the classic definition of the projectile residual velocity (V R) appears to be incomplete and is identified as the other reason of discrepancy.
In this article, we will present a critical review of the four CBLA articles in Historical Background section, identify the relative strengths and discrepancies, redefine the residual velocity of the projectile incorporating the principle of relative velocities, and use the new definition of projectile residual velocity in formulating the new penetration equation for BLA including the transfer of momentum and energy to the bulk target while writing the complete momentum and energy equations. We will also present that the penetration equations thus derived satisfy both momentum and energy equations simultaneously.
Historical background
In terminal ballistics, calculation of the ballistic limit velocity (V
BL) of a projectile–target pair requires experimentally measured impact (V
I) and residual (V
R) velocities of the projectile and the use of a penetration equation. In CBLA, it is assumed that at the ballistic limit of a projectile–target pair, the V
R of the projectile is zero, and the V
I of the projectile is equal to the V
BL. Above the ballistic limit, the V
R is positive definite. Mathematically, these conditions are expressed using the following equations


A functional relationship between the V I and V R projectile velocities in the form of a penetration equation is needed to calculate the V BL of a projectile–target pair from the experimental ballistic data. In the following sections, we will present a review of the four CBLA penetration models available in the literature while discussing their relative strengths, weaknesses, and differences.
Recht–Ipson model
Recht and Ipson
1
developed a model for the perforation of thin plates under normal and blunt impact (Figure 1), and later extended the model for oblique impact scenarios. For a cylindrical projectile of diameter (D
P), height (H
P), density (ρ
P), and mass (m
P) and a target plate of thickness (H
T) and density (ρ
T), the following geometric conditions have been defined for a thin plate.

Recht–Ipson model for perforation of thin targets.
Conceptual sketch for Giere model.
Since the plate is thin, perforation and ejection of a plug (of mass (m E) and diameter (D plug)) is assumed to be the dominating mode of failure. Plastic deformation around the plug due to shear is identified as one source of energy dissipation, dishing of the plate is ignored with some reasoning, and the V R of the projectile and the plug is assumed to be the same (although the authors recognized the fact that that they may be slightly different).
To begin with, Recht and Ipson considered that the plug is entirely free from the plate and wrote the following conservation of momentum equation for the inelastic impact between the projectile and the free-flying plate–plug.

Where V
f is the residual velocity of the projectile and the free-flying projectile–plug pair. The energy lost to deformation and heat (E
f) during this free-flying impact is calculated by the difference between the initial and final kinetic energy.

Recognizing the fact that this estimate of E
f given by equation (4) is less than that for the case when the plate–plug is embedded in the plate, the work due to plastic shear deformation (W
p) around the plug is included in the final conservation of energy equation for the case where the plug is embedded in the plate (not free-flying) as given by the following equation

where V
R is the residual velocity of projectile–plug pair (not free-flying). Substituting the condition at ballistic limit (equation (1a)), the plastic work at the ballistic limit (W
p,BL) is estimated by the following equation

At this point, it has been assumed that the plastic work at ballistic limit given by equation (6) remains constant for higher impact velocities (equation (1b)), and equations (4) and (6) are substituted in to equation (5) to obtain the residual velocity of the projectile as a function of impact velocity.

Considering the ratio of

Equation (7) can be further simplified to

Equation (7) is further modified for thick plates arguing that the projectile plastically deforms the target material in the first phase and ejects a plug thinner than the target plate thickness with a different mass (m
e) in the second phase. Following the same procedure described in equations (3) to (7), the residual velocity for a thick plate (V
R,Thick) has been derived to be

It is obvious that for thin plate perforation, m
e = m
E, and thus equation (9) reduces to equation (7). Furthermore, penetration of a target with a pointed projectile has been considered by assuming that no plug will be formed in this case, and instead the penetration will occur by displacing and compressing the material laterally such that m
e = m
E = 0 and E
f = 0 yielding the following relationship.

Equations (7) to (10) fit the experimental data presented by Recht and Ipson well and predicted the corresponding V BL of each projectile–target pair.
Recht–Ipson model is mainly based on conservation of energy principle because the conservation of momentum has been partially used in the analysis of the free-flying projectile–plug pair but not for the entire projectile–plate system. It is also evident that the momentum or impulse transfer to the bulk target other than the free-flying projectile–plug is completely ignored and can be treated as an over simplification of the problem. Without prior knowledge of Recht and Ipson’s work, Giere 2 developed a model considering the energy and momentum transfer to the bulk target and is presented next.
Giere model
Giere 2 applied the conservation of energy and momentum principle on the bulk target plate and the ejected projectile–plug pair. Giere assumed that the bulk target plate of mass M BT is moving with the velocity V BT, while the projectile–plug pair is moving with the residual velocity V R (Figure 2).
The conservation of energy and momentum for the entire projectile–target pair has been written as presented in the following equation


where W
Total is the total energy dissipation or total work done during the entire impact event. Equations (11a) and (11b) are solved to obtain the following relationship

Equation (12) satisfies both momentum and energy conservation simultaneously. At this point, Giere simplified equation (12) by considering

One can also obtain equation (13) by setting V BT = 0 in equation (11), as if the momentum and energy transport to the bulk target is ignored.
Giere reconsidered the energy and momentum equation (11a) and (11b) by denoting W
Total = E
IE + E
O, where E
IE is the energy lost due to the inelastic impact, EO is the energy lost to the rest of the target, and denoting the kinetic energy and momentum transport to the bulk target by E
BT and P
BT, respectively. With these reconsiderations, and only taking the energy lost due to inelastic impact E
IE in the energy balance, equations (11a) and (11b) can be transformed to the following form


E
IE can be solved using equation (14a) and (14b) resulting in the following equation

At this stage, Giere assumed the transmitted energy and momentum ratios to be small and simplified equation (15) into

and expressed the total energy as

Substituting equation (17) in equation (13) provided the following solution

Considering again the energy ratio

It is clear that if one neglects the transmitted energy and momentum to the bulk target plate in equation (14a) and (14b); equation (19) can be derived directly from the momentum equation (14a). Giere’s model formulation included the transmitted energy and momentum into the bulk target plate and simultaneously solved the conservation of energy and momentum equations, which was not considered in Recht–Ipson model. However, Giere failed to include the V BL concept in his formulation and the over simplification made his final equation completely based on the conservation of momentum. Present research will use a complete formulation similar to Giere, but include the V BL conditions in it.
Ipson–Recht model
Ipson and Recht
3
have revised their previous model by including the momentum and energy transfer to the bulk target plate, considered the mass of the eroded projectile (m
EP) and also considered the residual velocity of the eroded projectile (V
EP) and the ejected mass (V
EM) to be different. They also assumed that the change in momentum of the eroded projectile be the same as the change in the momentum of the ejected mass.

The V
EP and the V
EM were then expressed in terms of the classic V
R as

Conservation of energy and momentum for the complete system including the energy and momentum transfer to the bulk target plate was written as


Ipson and Recht also identified that V
BL is not constant for higher impact velocities (see conditions in equation (1b)) and denoted the ballistic limit velocity as V
X; however, we will denote the variable ballistic limit velocity by V
BLX. Following the same procedure described in Recht–Ipson Model section, the final equation for the residual velocity was found to be

Since V
BLX is a function of impact velocity, they have also derived the following relationship.

To evaluate equation (24), Ipson and Recht suggested and then developed a precision ballistic pendulum to measure the impulse P BT as a function of impact velocity V I, and validated their model with many experiments.
If one considers no erosion of the projectile, equation (23) transforms into equation (7) of Recht–Ipson model. Since equation (23) considers the V BLX as a function of V I, data obtained from experiments conducted without ballistic pendulum should be analyzed with the earlier Recht–Ipson model. Even though the Ipson–Recht model considers the transfer of momentum to the bulk target plate to calculate V BLX as a function of P BT (equation (24)), their model given by equation (23) has the same functional form to their earlier model given by equation (7) 1 and bears the same limitations described earlier.
L-J model
In the US Ballistic Research Laboratory (Aberdeen Proving Ground, Aberdeen, Maryland, USA) report no. 1852, Lambert and Jonas
4
made the following comments about traditional penetration theories (for review, see Section 2, p. 10. Traditional penetration theory, especially where an explicit model is developed, has been most extensive (and evasive of much unpleasantness) in dealing with the case of a rigid (mass-preserving), essentially non-deforming penetrator; e.g. a steel projectile impacting a thin aluminum plate. Such treatments, otherwise tolerating a diversity of assumptions about the physics of the particular penetration process conjectured, have been numerous. It is a pertinent observation, and is perhaps not generally recognized, that the penetration models evolved from these theories have almost invariably adhered to one basic form; especially:

** In this equation, ‘v’ is the velocity, subscripts ‘r, s & l’ stand for ‘residual’, ‘strike’ & ‘limit’, respectively.
In their philosophical report, Lambert and Jonas presented many different mathematical analyses, discussed different limiting and difference formulations, and finally proposed a basic form of penetration equation, which will be applicable to thin and thick targets (for a projectile length to diameter ratio,

where β and p are fitting parameters with constraints 0 ≤ β ≤ 1 and p > 1.
While further discussion on the L-J models can be found in the studies by Ben-Dor et al.,
5–7
and Carlucci and Jacobson,
8
at a minimum, we can say that for all cases of
In this article, we will first redefine the ballistic variables and parameters for moderately thick and thick target plates and will determine the conditions for which the new definitions are applicable for thin targets. We will consider the transmitted momentum and energies to the bulk target plate in the form of a moving cone of damaged or deformed material ahead and surrounding a blunt (cylindrical) projectile under normal impact. The new definition of variables and parameters will be used to develop a penetration equation for thick target plate based on momentum equations, and the results will be simplified for thin plate assumptions. Following the methodology developed for momentum equations, a second penetration equation will be written from energy equations, and the momentum relationships will be used in the energy equations to obtain the final solution. The general solution derived for thick plates will be applied to thin target configurations. In this special case, it will be shown that the solutions obtained herein from momentum and energy principles are identical for thin plate assumptions.
New definition of ballistic variables and parameters for moderately thick and thick target plates
V I of a projectile is also known as the striking velocity with which the projectile impacts or strikes the target. V I is considered positive in the direction of impact. This velocity also represents the instantaneous velocity of the projectile at the time of impact, t = 0.
Projectile velocity or instantaneous projectile velocity is the projectile rigid body velocity at any time t > 0, when the projectile is either penetrating through the target, or being arrested by the target, or exiting from the target. This velocity can be defined as

where
Ballistic penetration model redefined.
At time t = 0

V
P/T is positive during penetration, zero if the projectile and the target in contact are moving together, that is,
If the projectile penetrates through and exits from the target with a positive velocity, the instantaneous rigid body velocity of the projectile is termed as the residual velocity of the projectile,

At the V
BL, equation (28) can be rewritten as

The classic definition of V
BL of a projectile–target pair is the theoretical V
I of the projectile for which, the V
R of the projectile is zero. This definition of classic V
BL is not complete. We will redefine the V
BL of a projectile–target pair as the highest theoretical V
I of the projectile for which, the relative velocity of the projectile with respect to the target in contact is zero at the end of the penetration event. Substituting V
P/T,BL = 0, in equation (29), we have

Equation (30) enforces that, at ballistic limit, the projectile and the target in contact are moving together with the same velocity, which ensures that the projectile cannot eject from the target. The classic definition of “complete penetration” (CP) is that the projectile should eject from the target and in addition should perforate a thin target of insignificant penetration resistance. 8,10 A “partial penetration” (PP) is naturally defined as the projectile that does not eject from the target. According to the classic definition of CP, the V BL represents a case of PP. The new definition of projectile instantaneous velocity given in equation (26) thus provides a mathematical way of defining the projectile motion at any V I below, at, and above the V BL and is used in the derivation of momentum and energy equations in this manuscript hereafter.
A new penetration equation for BLA
Conservation of momentum along the direction of impact
Consider a right circular cylinder projectile of diameter D
P (radius R
P), mass m
P, and density ρ
P impacting an target of density ρ
T, and thickness H
T, with impact velocity V
I. Denoting m
Plug as the mass of the target on the line of sight of the projectile of diameter D
P, and using the Cunniff parameter

In case of V I > V BL, neglecting the boundary effects, the conservation of momentum can be written as

where the projectile is assumed intact and moving with the V
R after complete penetration. A target mass of m
Plug is assumed to be separated from the target and traveling with the V
R of the projectile. It has also been assumed that a moving cone of target takes away additional momentum
where I
T,R, is the dimensionless momentum integral (bracketed term in equation (33)). In equation (33),

In case of V
I = V
BL, V
P/T,R = 0 and assuming no target pieces are ejected at the ballistic limit, that is,

Using equation (33), equation (32) can now be rewritten as

which can further be simplified to

where

where

is the maximum target velocity (at r = R
P) to impact velocity ratio, and

At ballistic limit, V
I = V
BL, V
P/T,R = 0, and assuming no mass ejection at ballistic limit, that is,

Equation (37) can now be simplified to its dimensionless form as

Equation (42) is derived from the conservation of momentum and we will later show that the penetration equation derived from the conservation of energy leads to an identical solution for thin targets.
Conservation of energy
At impact velocities higher than the V
BL, the conservation of energy can be written as

where
where J
T,R, is the dimensionless energy integral. The kinetic energy of the ejected small target pieces can be expressed as

At ballistic limit, V
I = V
BL, V
P/T,R = 0,

which can be simplified to

Considering the ejected kinetic energy to impact energy ratio at ballistic limit,


where

which can be further simplified to

where subscript ‘BL’ is replaced with ‘R’ in equation (49) to define

or,

Equation (53) is the new penetration equation for the BLA of a projectile–target pair without any simplification or omission of negligible terms. Note that there are several unknown parameters in equation (53), that is (i)
At ballistic limit,equation (53) reduces to

which can be further simplified to

Assuming that the left hand side term of equation (55) remains constant for V
I > V
BL, and substituting equation (55) in equation (53) yields

Using equations (38) and (41) which can be expressed as

and be further simplified to

Equation (58) is the simplified version of the new penetration equation, equation (53), where the simplification is made possible by the assumption and the use of equation (55). Equation (58) has the following functional form,

where

In equations (59) and (60), parameter

Equation (61) is very similar to the classic Recht–Ipson model with two additional terms,that is,
In case of a thin target, it can be shown that the momentum and energy conservation equations provide identical solutions. Mathematical equations proving this statement is provided in Appendix 2. While the functional form of equation (61) is applicable to both thin and thick targets, identical thin plate solutions provide the validity and robustness of the present formulation. In the following section, application of this new penetration equation (61) fitting different ballistic experimental data is presented. Equation (61) is a functional form of the complete equation (58) and sets the background for further development of theoretical penetration models by defining the parameters
Validation with experimental data
Two different composite materials (M1 and M2) of equivalent areal density (AD M1 = 30.63 kg/m2 and AD M2 = 30.36 kg/m2) have been tested under ballistic impact with two different blunt projectiles (P1 and P2) of mass, m P1 = 2.85 g and m P2 = 13.4 g. Absolute V I and V R velocities of the projectiles are measured and presented in Figure 4 as hollow and solid circles and squares.
Validation of the new penetration equation (61) with experimental data.
The theoretical values of
Fitting parameters of Recht–Ipson equation (8) and L-J equation (25) from ballistic experimental data.
L-J: Lambert–Jonas.
Fitting parameters of equation (61) from ballistic experimental data.
We have found a set of data in the L-J report for a long rod penetrating a steel target for which the L-J constant, exponent, and ballistic limit velocity had been found to be β = 0.91, p = 3.4, and V
BL = 802 m/s (Figure 5). This specific example is chosen because p = 3.4 violates the conservation of energy principle, and the data showed an apparent jump in residual velocity at ballistic limit which cannot be predicted with Recht–Ipson equation (equation (8)). Recalling that according to the new definition of the absolute residual velocity of the projectile (equations (26) to (30)) is not zero at ballistic limit rather the projectile and the target in contact moves at the same velocity. If the projectile comes out from the target because of any anomaly in the target or because of a small differential kinetic energy, a jump in the residual velocity at and around the ballistic limit may appear and is very common in literature. In this example, we would like to show that the new penetration equation (61) can fit this data without violating the conservation of energy, while predicting the jump in residual velocity at and around the V
BL. This L-J data set includes the highest partial of V
I,HP = 802 m/s (with a residual velocity of VR,HP = 0 m/s) and the lowest complete of V
I,LC = 807 m/s (with a residual velocity of V
R,LC = 388 m/s). The classic Recht–Ipson model (equation (8)) or the L-J model (equation (25)) cannot predict any jump in V
R of the projectile; however, the new penetration equation has this jump built-in as 
In order to fit equation (62), the jump velocity
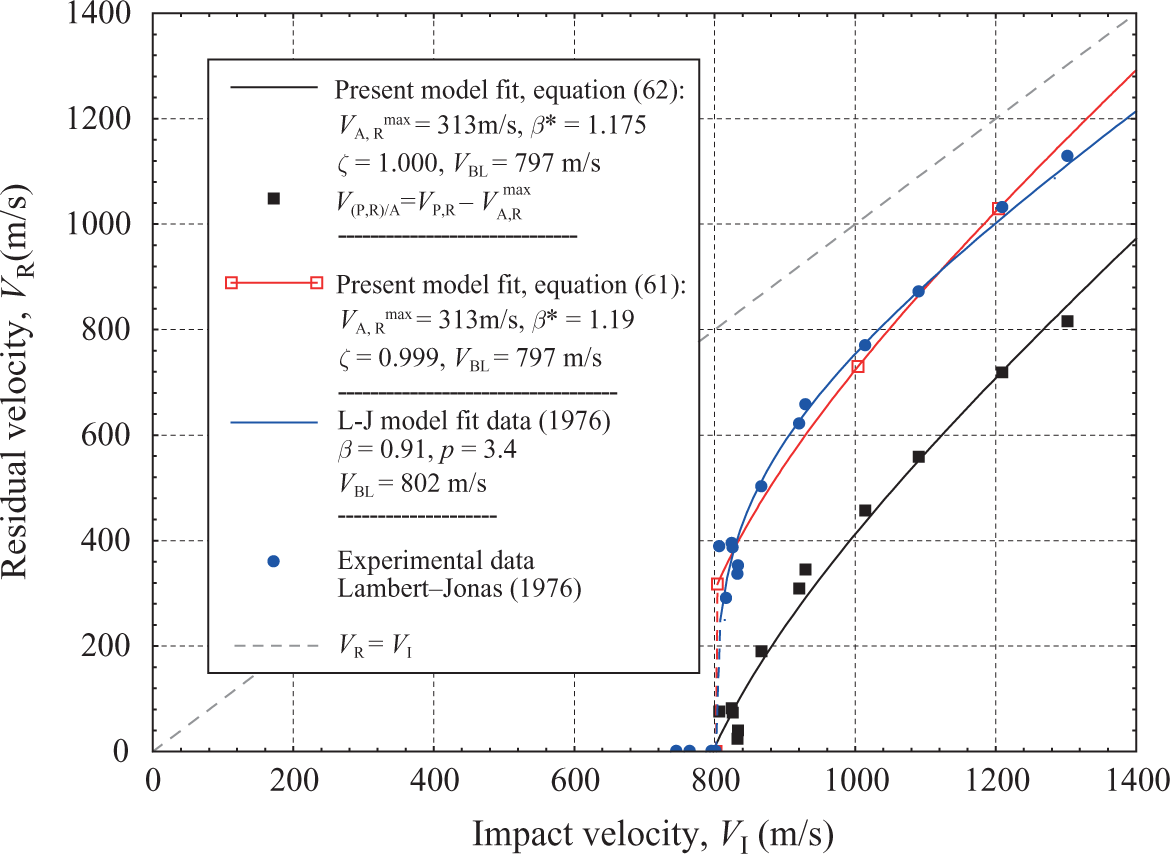
Validation of the new penetration equation (61) with Lambert–Jonas model.
Summary
A critical review of CBLA is presented. It has been found that none of the CBLA penetration equations uses both the conservation of momentum and energy equations simultaneously or completely. Despite the success of CBLA penetration equations in fitting ballistic experimental data for decades, the present analysis focuses on formulating a new penetration equation satisfying both the momentum and energy conservation principles simultaneously and completely.
We have redefined the projectile’s absolute velocity as a sum of target velocity in contact with the projectile and the relative velocity of the projectile with respect to the target in contact. This new definition explains the projectile motion in all impact scenarios, and redefines the ballistic limit of the projectile by setting the relative velocity of the projectile to zero. Theoretical penetration equations are derived both from momentum and energy conservation principles, which provided identical solutions. The new formulation has also been reduced to represent nonpenetrating thin target plates and the results are found satisfactory from both momentum and energy considerations.
Even though a complete theoretical solution is not obtained from the momentum equation, we have proven that it is equivalent to the solution obtained from the combined momentum and energy equations for thin target plates. Ballistic experimental data are fitted with the new functional form of the penetration equation and the parameters determined. It has also been shown that the new penetration equation can predict the jump in experimental V R at and around the ballistic limit and works for all scenarios of thin and thick targets.
Footnotes
Appendix 1
Appendix 2
Authors’ Note
The views and conclusions contained in this document are those of the authors and should not be interpreted as representing the official policies, either expressed or implied, of the Army Research Laboratory or the US Government. The US Government is authorized to reproduce and distribute reprints for Government purposes notwithstanding any copyright notation heron.
Funding
The current research was sponsored by the Army Research Laboratory and was accomplished under Cooperative Agreement Number W911NF-06-2-011.