
Abstract
Thermomechanical cycles including programming, cooling, unloading, and heating to trigger the 1WE were examined for a shape memory polymer, Tecoflex® (TFX EG − 72D). Cycles were performed at 60°C with 300% strain and a recovery time of 10 min. Strains evolving with time were estimated during the thermomechanical treatments for the total 50 cycles using 300% strain. Recovery ratios for the 300% strain were also estimated. It turns out that programming, cooling, unloading and heating to trigger the 1WE causes an increase of irreversible strain and is associated with a corresponding decrease of the intensity of the 1WE in particular during the first thermomechanical cycles.
INTRODUCTION
Shape memory properties offer a very striking insight into materials science and engineering, opening unexplored horizons and giving access to unconventional functions in every materials class: polymers, textiles, metals, and ceramics. Shape memory polymeric (SMP) materials have received a very good growing attention in the past decades in different fields of applied sciences, medical sector, aerospace engineering, etc. [1–11]. SMPs are a class of smart materials that offer mechanical action triggered by an external stimulus [12]. The only human intervention for SMP materials to provide the required external stimuli is to achieve shape recovery. Since the shape recovery mechanism depends on the conformational entropy restoration, the system can be considered to be autonomous. The ability to heal damages multiple times depends on the amount of energy supplied during the initial impact or deformation event. This could be done by a typical four-step thermomechanical cycle called programming (one-way effect (1WE)) [12]. It is possible to get a 3D relationship during the programming cycle for tensile stress (σ), tensile strain (ε), and temperature (T) to see the mechanical behavior. SMP materials can be perceived as possessing two phases: (1) a frozen (hard segment) phase and (2) a reversible switching (soft segment) phase. The soft segment is responsible for the shape recovery or in other words strain recovery. The soft segments deform upon a transition temperature (Ttrans), which is the glass transition temperature (Tg) or the melting temperature [13]. Since the glass transition temperature, Tg, of a SMP can be set at moderate temperature and the characteristics of molecular motion differ above and below Tg, the mechanical properties differ markedly above and below Tg. As there is only limited information available on how often programming/1WE-cycles can be repeated and how this affects SMP material properties, in this investigation we examined the commercially and industrially applicable amorphous SMP Tecoflex® (TFX EG – 72D) as a model material and subjected it to 50 programming/1WE cycles at a particular temperature near to Tg.
EXPERIMENTAL
Our tensile experiments were done by using SMP strips of the thermoplastic SMP Tecoflex® (TFX EG – 72D) (Lubrizol, USA). The strip dimensions were 4 × 10 × 150 mm3 (70 mm parallel sample length) and was purchased as granulate for injection moulding. Our injection moulding parameters are melt temperature of TFX: 204°C, mould temperature: 30°C, injection rate: 26 mm/s, injection pressure: 60 MPa, holding pressure: 55 MPa and holding time: 15 s. For injection moulding, we used an Arburg Allrounder 270 M 500-210 extruder.
Tecoflex® samples were tested using a Zwick 2.5 (Ulm, Germany) test rig with a testXpert® control and data acquisition system equipped with a temperature chamber to adjust temperatures. A total of 1000 N cells were used for ambient (Tamb = 20°C) and high temperature (Thigh = 60°C) testing. Tests were performed at crosshead speeds of 5 mm/min. Strains were derived from crosshead displacements. Heating/cooling rates of 5 K/min were applied between 60°C and 15°C in the programming/1WE cycles which were performed for a bit high strain of 300%. The time interval for completion of the 1WE on heating was 10 min, before the next cycle was imposed. For each cycle, we determine a recovery ratio which is given by
where εm is the maximum (programming) strain and εirr, N the irreversible strain which the 1WE cannot recover. The experiments were taken through 50 cycles where cycling was interrupted.
Dynamic mechanical analysis using pull–pull loading was used to measure the glass transition temperature Tg using an Eplexor 500 N (Gabo Qualimeter). The glass transition temperature, Tg, is 74°C of the soft segment which is the transition temperature Ttrans of the SMP, Tecoflex® [13].
RESULTS AND DISCUSSION
Tensile Testing
Tensile testing was performed at 20°C and 60°C to obtain stress strain data for the two material states of interest. At ambient 20°C, there is a linear increase of stress up to 26 MPa at 25%, from where it drops to a plateau stress of 22.5 MPa. Rupture occurs at a strain of 425%. At temperature 60°C, which is near to the transition temperature Ttrans a completely different behavior is observed. Strain at failure reaches more than 2700%. Maximum stresses depend on the test temperature and reach no more than 0.1–0.3 MPa. With 60°C temperature the material softens. In our experiments, no ruptures occurred. Instead the material plastically flows without breaking [13].
Cycling, Programming and 1WE
Figure 1 shows the thermomechanical behavior of Tecoflex® starting with cycling and programming and subsequently following the 1WE. It is noted that Tecoflex® as a SMP material has a processing shape B and a programmed shape A [1]. And when the Tecoflex® material is exposed to an appropriate stimulus (in our case: heating above a critical temperature), a 1WE is observed: A → B 1WE). This experimental study finds out whether and how often programming can be repeated, whether repeated programming affects the 1WE and how much irreversible strain the plastic material, Tecoflex® accumulates at a particular temperature, 60°C.
Programming and 1WE for only one programming condition. 3D picture of temperature – strain – stress space.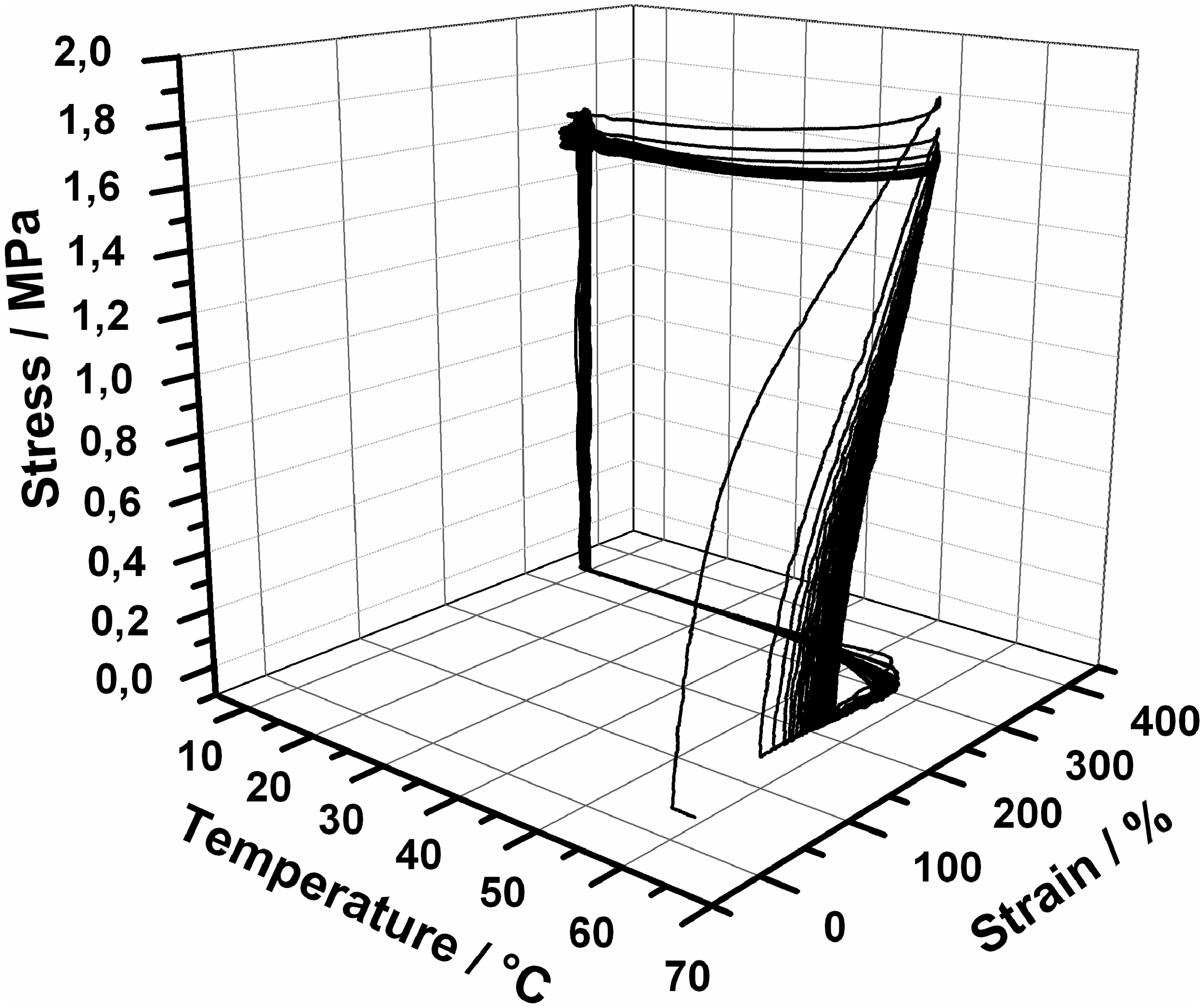
Therefore, Figure 1 shows the materials responses in the temperature strain stress space during programming, constrained cooling, unloading, and re-heating. Our results correspond to the schematic scenario of a SMP [8], but we applied only little overheating near to Ttrans. In Figure 2, we present 2D stress strain sections through the 3D spaces of Figure 1. From Figure 1, we determined the recovery ratios as defined in Equation (1).
2D picture of stress – strain section at Tmax for strains, εm = 300%.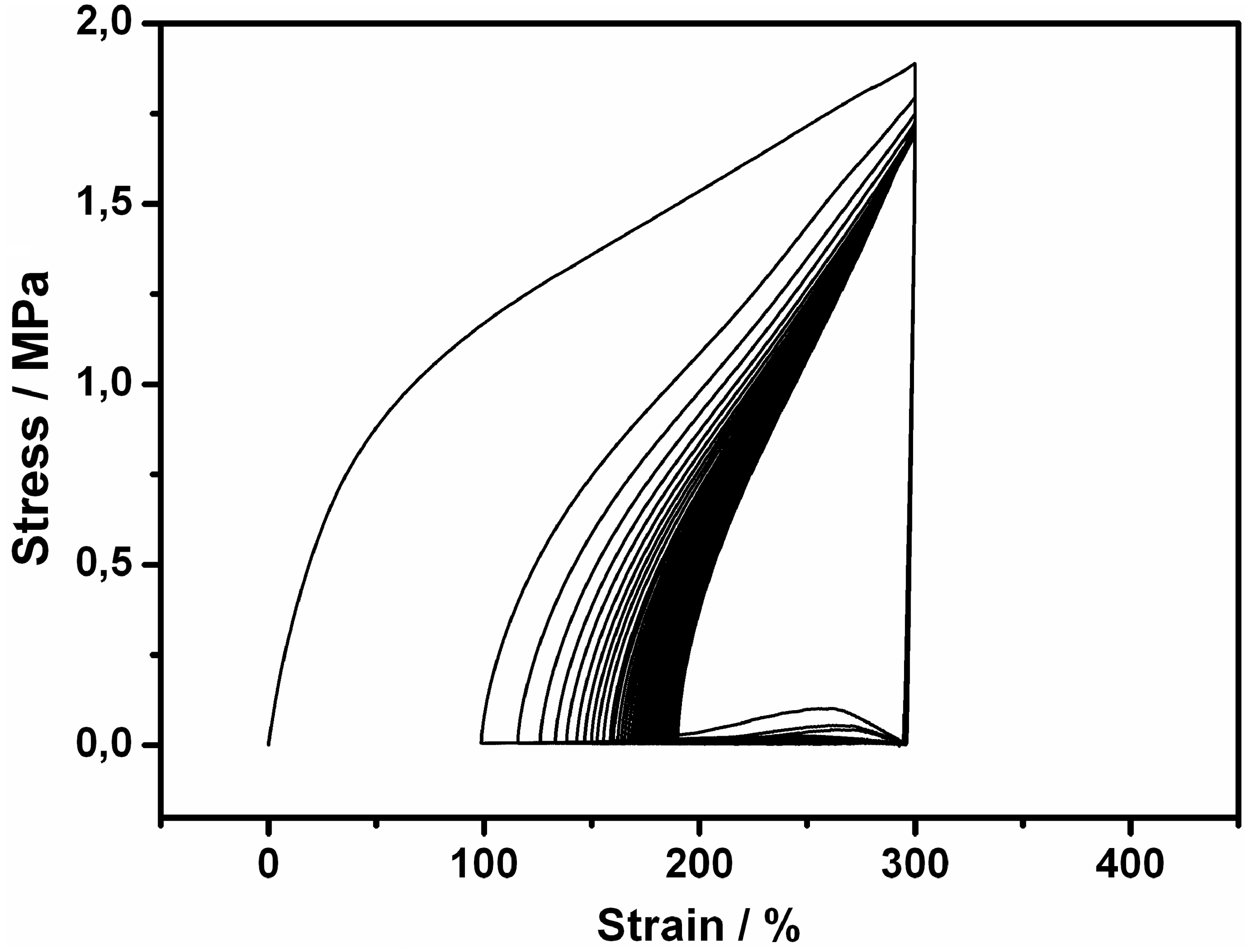
Evolving Strains with Time
Figure 3 shows how strains evolve with time during the thermomechanical treatments reported in Figures 1 and 2. Total strains as a function of time during cycling, processing and programming/1WE-cycles. In the case of Figure 3, a case study of a high strain, 300% strains is evolving with 110,000 s during the thermomechanical 1WE-cycles for the total 50 cycles.
Figure 3 shows that for a specific high strain of 300% irreversible strains increase up to 30–35 cycles. After 35 cycles very less significant additional increase in irreversible strain is observed.
Total strain as a function of time during programming/1WE-cycles of strains, εm = 300% (50 cycles).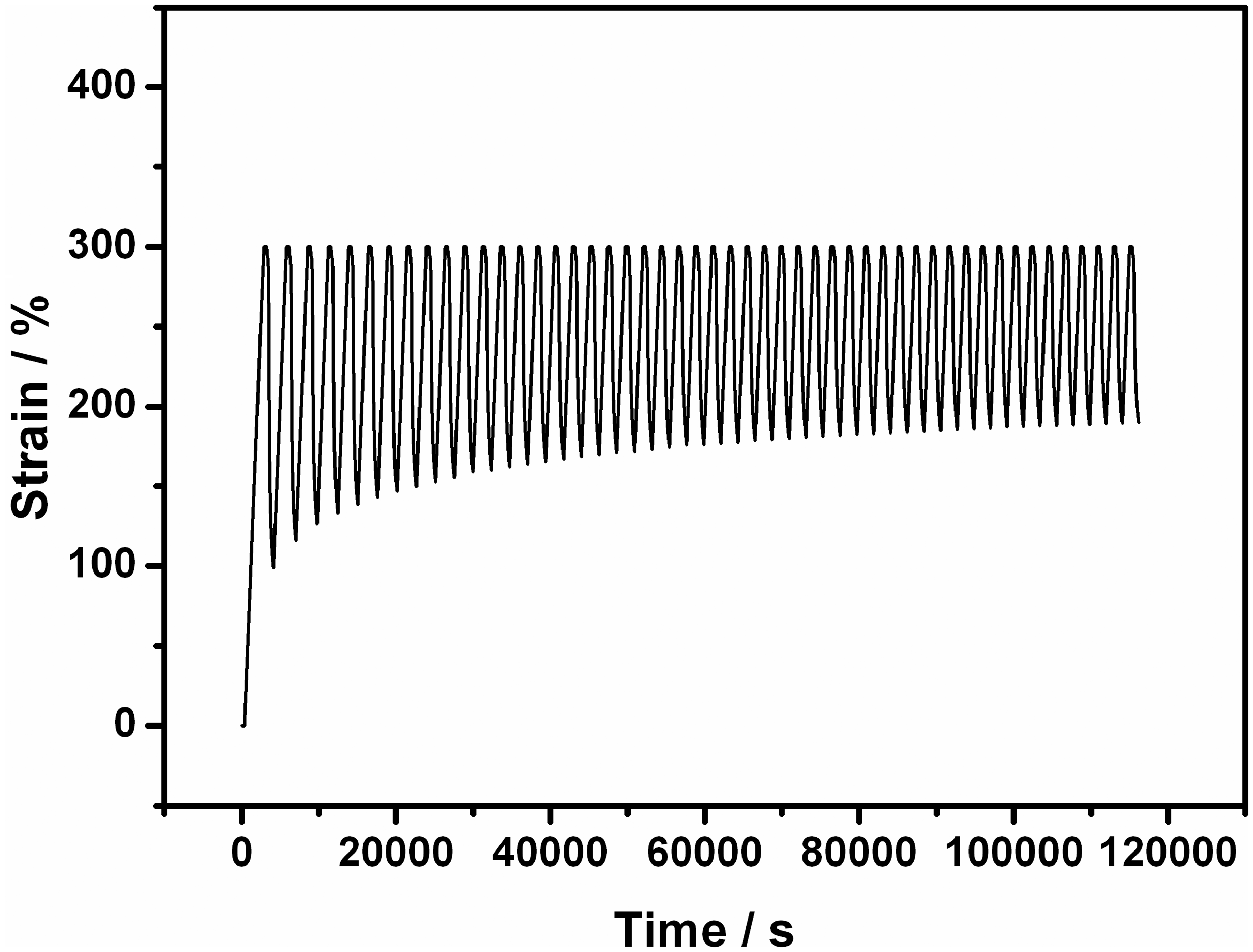
Evolution of the Recovery Ratio,
R
In Figure 4, we showed the evolution of the recovery ratio R (as defined in Equation (1)) as a function of the number of full programming/1WE-cycles.
Recovery ratio, R (Equation (1)) as a function of the number of full programming/1WE-cycles for strains, εm = 300% (50 cycles).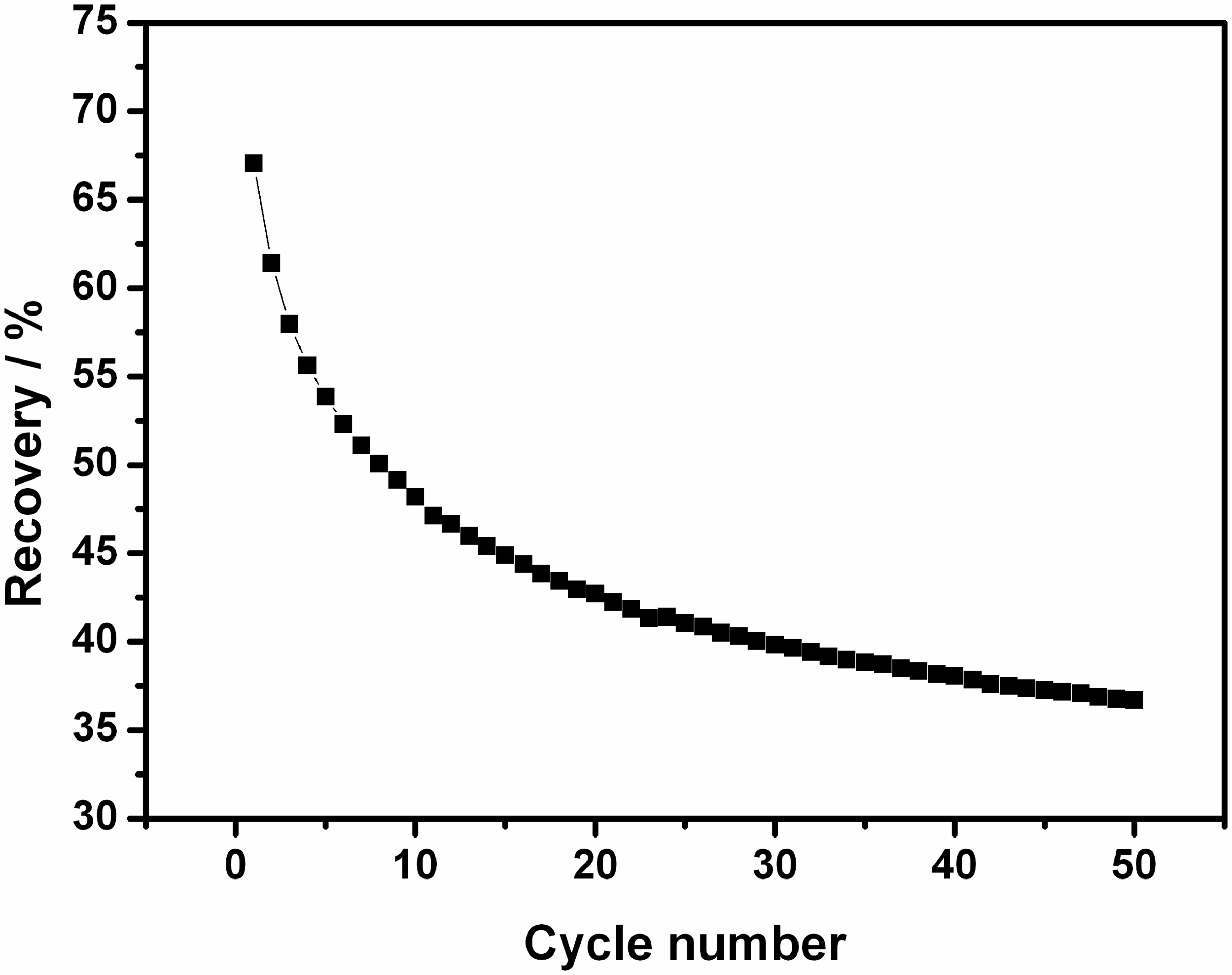
It is observed that for εm = 300%, after 10 cycles, the recovery ratio, R, is 47%. After 20 cycles, the recovery ratio, R, is 42%. Similarly after 30, 40, and 50 cycles the recovery ratio, R, is around 35–38%. It can be seen that higher recovery ratios R are obtained for less number of cycles. And lower recovery ratios R are obtained for higher number of cycles. And since R evolves with εirr (Equation (1)), it also saturates out after a certain amount of cycles. Further optical study and IR study could be done to see the elaborate effect of cycling and programming of Tecoflex® [14–16].
CONCLUSIONS
Thermomechanical cycles including programming, cooling, unloading and heating to trigger the 1WE were performed at 60°C for a higher strain of 300% and a recovery time of 10 min. It was found that 300% maximum strain εm results in good recovery ratios as strains evolving with 110,000 s during the thermomechanical 1WE-cycles for the total 50 cycles.
Footnotes
ACKNOWLEDGMENTS
The authors acknowledge funding by the Deutsche Forschungsgemeinschaft (DFG) and the State North Rhine Westphalia (NRW). Prof. Dr A.M. Sarwaruddin Chowdhury acknowledges the Alexander von Humboldt (AvH) support to participate in this important research work.