
Abstract
Conventional transportation practice attributes traffic crashes to human error, leading to the prevailing assumption that crash prevention is principally an outcome of driver education and law enforcement programs. But what if planning and urban design decisions induce human errors? In this study, we examine the literature in organizational systems safety, cognitive psychology, and behavioral economics to detail how cognitive interpretations of the built environment may produce the errors that result in traffic crashes. We proceed to examine crash incidence in Charlotte-Mecklenberg County in light of this cognitive framework and discuss its implications for research and practice.
Keywords
The basic principle of Safe Systems starts with the insight that human error should no longer be seen as the primary cause of crashes. Instead, road crashes are seen as a consequence of latent failures created by decisions and actions within the broader organizational, social or political system which establishes the context in which road users act.
Introduction
Traffic safety, and particularly a concern for the safety of pedestrians and cyclists, has long been a concern of the planning profession. Nonetheless, the prevailing model for addressing traffic safety is one that provides little opportunity for planners to meaningfully influence safety outcomes (see Figure 1). Under this model, crashes are regarded principally as a product of human failures (National Highway Traffic Safety Administration [NHTSA] 2015), leading to the view that crash prevention is best achieved through programs aimed at altering driver behavior, such as driver education programs and advertising campaigns that seek to discourage people from driving under the influence of drugs or alcohol or texting while driving, among others. Design is viewed not as a means of crash prevention, but instead as a mechanism for reducing the consequences of these otherwise unpreventable human errors. Typically, this entails the application of engineering countermeasures intended to “forgive” these errors, such as wide travel lanes and roadside clear zones (Dumbaugh 2005).
The current model for addressing traffic safety.
While education, enforcement, and vehicle safety systems have been successful in reducing traffic-related death and injury through the 1990s, the safety improvements attributable to these strategies appears to have tapered off, and traffic fatalities have begun to increase in the United States over the last decade, particularly for pedestrians (NHTSA 2017). Much of the problem is the design of our transportation infrastructure; after controlling for safety improvements attributable to increased seat belt use, reductions in drunk driving, and improvements to emergency services, the changes to our transportation infrastructure have been found not to reduce fatal crashes, but to instead increase them (Noland 2003; Noland and Oh 2004). Over the last three decades, seat belt usage rates have climbed to 90 percent, while fatalities attributable to drunk driving have been reduced by nearly 50 percent (NHTSA 2019). Collectively, this suggests that new approaches are needed if we are to make meaningful advancements to traffic safety.
Safe Systems (also referred to as “Sustainable Safety” in the Netherlands), has emerged as a response to these trends. As an approach to road safety, Safe Systems is centered on the kinetic energy model, based on the recognition that crash-related trauma is a direct function of the human body’s ability to withstand the forces that occur during a crash impact (Corben et al. 2010). This has led to a four-pronged approach to addressing safety: providing safe roads, ensuring safe speeds, designing safe vehicles, and encouraging safe behavior (see Figure 2).
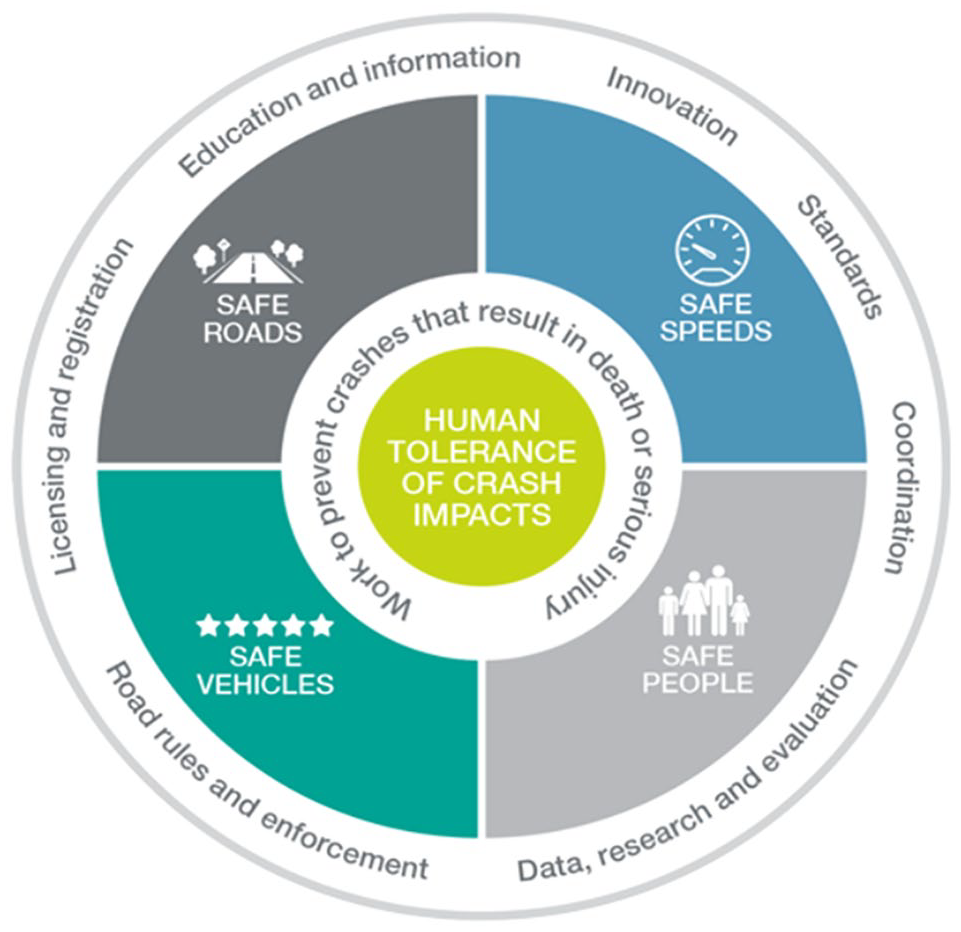
A safe systems approach to traffic safety (International Transport Forum 2016).
Of these four areas, two are of particular relevance to planners and urban designers: safe speeds and safe roads. Safe speeds is a relevantly straightforward concept that is already familiar to most planners and designers. Based on the understanding that crash severity increases significantly and exponentially as a function of impact speeds (Rosen and Sander 2009; Zegeer et al. 2002), Safe Systems asserts that “speed policy should seek to minimise the kinetic energy released in a road traffic collision” (International Transport Forum [ITF] 2016). Less clear, but of no less importance, is the call for the creation of safer roads. The ITF states that “road safety needs to be a central focus when wider urban planning decisions are being made” (ITF 2016, 136). Absent from the literature, however, is any substantive discussion of what such a focus should entail, or how it is to be achieved. As stated by Salmon, McClure, and Stanton (2012), “although many have made the call for a systems approach, it has not penetrated road safety research, practice, or policy in any meaningful manner” (p. 1837).
The purpose of this article is to begin to define such an approach, particularly as it relates to the planning and design professions. Addressing traffic safety in urban environments requires a better understanding of the manner in which the built environment influences human cognition, and how cognition, in turn, influences the behaviors that result in traffic-related crashes, deaths, and injuries. To do so, we examine the literature in the domains of organizational systems safety, cognitive psychology, and behavioral economics to detail how the cognitive interpretation of the built environment may influence the behaviors that lead to crash incidence. We then proceed to examine crash incidence in Charlotte-Mecklenberg County in light of the cognitive framework we have proposed and conclude by discussing its applications for future research and practice.
Error, Crash Causation, and the Built Environment
The conventional wisdom, regularly encountered by planners and urban designers that engage in urban street design, holds that “90% or more all crashes are attributable to driver error” (NHTSA 2015). This factoid underpins the largely unsupported assertion 1 that automated vehicles will enhance safety, which is based on the rationale that if we eliminate the driver, we will therefore eliminate the errors they produce, which would in turn lead to elimination of 90 percent of all crashes.
Is it reasonable to assert that drivers are to blame for the 90 percent of all crashes that occur? This idea first emerged in 1979 from a study published by Treat et al. and remains the primary means for understanding crash causation through the present (NHTSA 2015). To arrive at this assertion, Treat and his coauthors examined data contained in police accident reports for Monroe County, Indiana, identifying the behaviors in which the participants were reported to have engaged immediately prior to the crash. Their assumption is that, had these behaviors been altered, the crash would have been prevented. 2 The logical exercise used in this analysis, known by behavioral economists as the simulation heuristic, entails the construction of an “if only” proposition (Kahneman and Tversky 1998; Roese 1997). If only the driver had not exceeded the speed limit, he or she would not have run off the road. If only a pedestrian had used protected crosswalk, he or she would not have been struck by the oncoming vehicle. Following this line of reasoning, which certainly has a high degree of face validity, if we can encourage people to reverse their pre-crash behaviors, we can reverse the crash outcomes as well.
From a systems-safety perspective, however, such explanations are regarded as naïve (Leveson 2004). Contemporary city streets, like other industrial systems, entail human interactions with complex environments. While it is true that people may err in the use of these systems, these errors cannot be solely attributed to human fallibility; many of these errors may instead be the result of a misalignment between the system’s design and manner in which it is likely to be used (Reason 1997). For planners and urban designers, this suggests that the need for a greater understanding of the manner in which people interpret and make behavioral decisions regarding their use of urban streets.
Understanding Driver Behavior: Scripts and Schema
Historically, safety researchers have applied utility models to understand driving behavior, based on the idea that drivers seek to maximize their speed or mobility in exchange for accepting some level of situated risk (Blomquist 1986; Fuller 2011; Noland 2013; Peltzman 1975; Wilde 1982b). Yet driving behavior is often not the result of intentional decisions to maximize utility, but instead a mundane activity typically accomplished by intuitive and largely preconscious processes (Perez et al. 2015). Individuals gleam information from their environment by relating it into existing cognitive categories, which allow them to quickly and efficiently process large amounts of sensory information and instantaneously apply it to the situation at hand (Rosch 1978; Van Elslande and Faucher-Alberton 1997).
With respect to urban streets, this means that drivers infer an overall sense of a roadway based on their existing knowledge of, and experience with, similar “types” of roadways. A simulation study has found that driver’s infer a roadway’s “type” through the presence of a limited number of environmental cues, such as lane widths or the massing of roadside development (Theeuwes 2012). This cognitive categorization in turn establishes expectations regarding the features that are likely to be present in the environment, referred to by psychologists as schema. Schema are relevant because humans are incapable of mentally processing the wide array of information contained in their environment (Gigerenzer and Brighton 2009; Kahneman 2011), leading them to cognitively simplify the interpretive task by intuiting the elements that are likely to be present and useful, and then filtering out most other (presumably irrelevant) sensory information 3 (Theeuwes 2002, 2012). In the language of behavioral economics, the characteristics of the built environment have the ability to “prime” expectations about the possible presence of specific crash hazards and thus prepare drivers to respond to their emergence (Höger and Seidenstücker 2007; Tversky and Kahneman 1982).
These expectations in turn lead to the production of behavioral scripts, which entail the organization of schema into behavioral routines. The production of scripts is why basic operational decisions, such as speed selection and lane placement, typically require little cognitive effort. They are automated behavioral routines that an individual intuits is appropriate for their environment, given their prior knowledge and experience (Abelson 1981; Schank and Abelson 1977).
The Role of Schema and Scripts in Common Crash Phenomenon
Schema and scripts explain phenomena that are regularly observed in the incidence of crashes involving pedestrians and cyclists. The first is popularly known as the “safety in numbers” hypothesis, which finds that as pedestrians and cyclists become more prevalent in a particular environment, their risk of being involved in a traffic crash declines (Jacobsen 2002; Leden 2002; Robinson 2005). From the perspective of human cognition, the increased presence of pedestrians and cyclists in a particular environment would be expected to lead to the production of refined schema and scripts that prepare motorists to anticipate their presence, thus making them better able to respond to a conflicting pedestrian or bicyclist movement.
Yet environments can also produce the opposite effect; namely, that their design fails to trigger schema regarding hazards that are, in fact, present, thereby rendering them cognitively “invisible.” This phenomenon, well documented in the psychology literature, is known as “inattentional blindness,” which is the failure to observe something that is, in fact, present and readily visible (Chabris and Simons 2011; Mack and Rock 1998). In the case of traffic safety, inattentional blindness results in a crash type categorized as “looked-but-failed-to-see,” a crash type that typically involves pedestrians, bicyclists, and motorcyclists, and which has been estimated to account for 10 percent of all fatal crashes (Brown 2002). In the case of inattentional blindness, the roadway’s environment fails to prime schema relating to the presence of pedestrians or bicyclists, resulting in the driver’s failure to “see” these users prior to crashing into them, even when they were located in the driver’s immediate cone of vision prior to the collision.
That consistent and predictable patterns in the cognitive interpretation of the built environment lead to correspondingly predictable increases or reductions in crash incidence suggests we can no longer attribute crash-producing errors purely, or even largely, to individualized patterns of human error.
Sources of Error: Active Failures and Latent Conditions
In the domain of organizational systems safety, human error is categorized as belonging to one of two types: active failures and latent conditions. Active failures are the type of error that serves as the focus of conventional safety practice and naturally occurs at the interface between humans and complex systems. Active failures are the result of a person incorrectly executing a “correct” intended action (known as a slip), or failing to undertake a “correct” intended action (called a lapse) and are the result of individual characteristics, such as distraction, fatigue, or impairment, rather than the result of design deficiencies. As such, they should not be concentrated at specific geographic locations, but instead distributed across the system as a function of trip generation and traffic volumes.
Yet organizational systems safety also recognizes a second source of error, one which is of far greater relevance to planners and urban designers. These are the errors that emerge out of latent conditions embedded into the design of the built environment, conditions that induce behaviors that increase one’s potential exposure to a crash event. As described by Reason (1997), latent conditions can be regarded as resident pathogens designed into complex systems, which lie dormant until activated by predictable combinations of local circumstances.
The errors produced by latent conditions—henceforth referred to as latent errors—are not the product of the ordinary slips and lapses that one can expect to occur across a given population. Instead, latent conditions are transformed into errors through design-induced mistakes, 4 which occur when road users execute a behavioral routine (i.e., apply a set of schema and scripts) that they intuit is appropriate for their environment, but which instead places them at increased risk. Unlike active failure, mistakes are directly and intrinsically associated with the design of the built environment and occur when the built environment fails to prime appropriate scripts and schema, as evidenced by the phenomenon of inattentional blindness. The presence of environmentally induced mistakes is already evident in the findings of research conducted in the domains of urban planning and design, which has consistently found that crashes are not evenly distributed, but are instead geographically clustered in specific environments, most notably along arterials and, especially, along arterials with adjacent commercial uses (Dumbaugh and Rae 2009; Hadayeghi, Shalaby, and Persaud 2003; Levine, Kim, and Nitz 1995a, 1995b; Lovegrove and Sayed 2006; Yu and Xu 2018). These environments result in the production of errors, and thus the incidence of crashes, that greatly exceed that which would be expected from slips and lapses alone.
Rule-Based Mistakes and Knowledge-Based Mistakes
Mistakes can be further categorized as belonging to one of two primary types. The first are rule-based mistakes, which occur when a road user applies an incorrect set of schema and scripts in their specific environment, resulting in behaviors that increase a person’s crash exposure. Rule-based mistakes are readily evidenced when drivers adopt operating speeds in excess of a roadway’s posted speed limit. While it is tempting to simply attribute this to reckless behavior, research in the domain of traffic psychology indicates that speed selection is influenced, in large part, by the design of the built environment. In a fascinating study by Recarte and Nunes (2002), drivers proved incapable of traveling at reduced speeds when their attention was directed to tasks other than monitoring the speedometer for compliance. When engaged in cognitive tasks requiring mental recall, drivers naturally increased their operating speed, a finding that suggests a reversion to intuitive operating scripts. Stated another way, when drivers are not performing the unnatural task of directing the entirety of their attention to monitoring the speedometer, they revert to the application of the behavioral scripts that they intuit are appropriate for their environment.
Similarly, the design of the built environment has been observed to reduce operating speeds beyond that which would be expected to be produced by street geometry alone. Features such as sidewalks, on-street-parking, street-oriented buildings, and roadside trees on urban streets have all been observed to produce statistically significant reductions in operating speeds (Dumbaugh 2006; Gargoum, El-Basyouny, and Kim 2016; Harvey and Aultman-Hall 2015; Ivan, Garrick, and Hanson 2009; Smith and Appleyard 1981). In these cases, the design and configuration of the built environment result in the adoption of lower speed scripts, which, in the majority of these studies, are associated with reductions in crash incidence
The second type of mistake is a knowledge-based mistake, which occurs when a driver or other road user encounters an unfamiliar situation, and where the correct behavior cannot be easily intuited from prior experience. In this situation, the individual is forced to make a conscious decision about how to proceed in the absence of adequate information. As detailed by Daniel Kahneman (2011), conscious decisions in complex situations are cognitively intensive and require deliberation. Mistakes can be expected to occur when the time needed to make a correct operating decision exceeds the time available to do so.
Knowledge-based mistakes can be observed at complex intersections, most notably at interchanges between freeways and arterials, where drivers are unsure about how to appropriately navigate an intersection. These crashes, known as “wrong-way driving,” are the result of an individual’s lack of knowledge about how to safely maneuver along complex interchanges and have been found to produce roughly 360 deaths in the United States each year (Pour-Rouholamin et al. 2014). To date, there has been little examination of the role of knowledge-based mistakes on crash incidence, though they are likely responsible for a significant share of crashes that occur at complex, multi-phase intersections, particularly those that employ permitted left-turning maneuvers or which apply lead-lag signal phasing.
Examining Active Failure and Latent Errors in Urban Environments
To date, there has been little, if any, examination into the relative role that active failures and latent errors may play on urban crash incidence. We conducted a literature search on the Transportation Research Information Database (TRID), provided by the National Academies of Science, using the terms “safe systems,” “active failure,” “latent conditions,” “latent error,” “latent failure,” and “mistakes,” among others, and were unable to find a single empirical study relating these concepts to traffic safety; in the cases where these search terms were present, they pertained almost exclusively to aviation and marine transport, or the movement of hazardous materials, areas that have long adopted an organizational systems-based approach to addressing safety.
As such, we sought to examine whether this theoretical framework might be similarly useful for understanding crash incidence on urban streets. To do so, we conducted a geo-spatial analysis of crash frequency and severity at the block group level for Charlotte-Mecklenburg County, North Carolina (see Figure 3). Because there are no readily available data sources on behavioral adaptations to different environmental conditions, we sought to construct operational definitions from available data sources that would allow us to examine whether the distinction between active failures and latent errors may be a useful theoretical frame for understanding urban crash frequency and severity. While this is an examination of a single metropolitan area, it is nevertheless instructive for examining the theoretical relevance of these concepts.
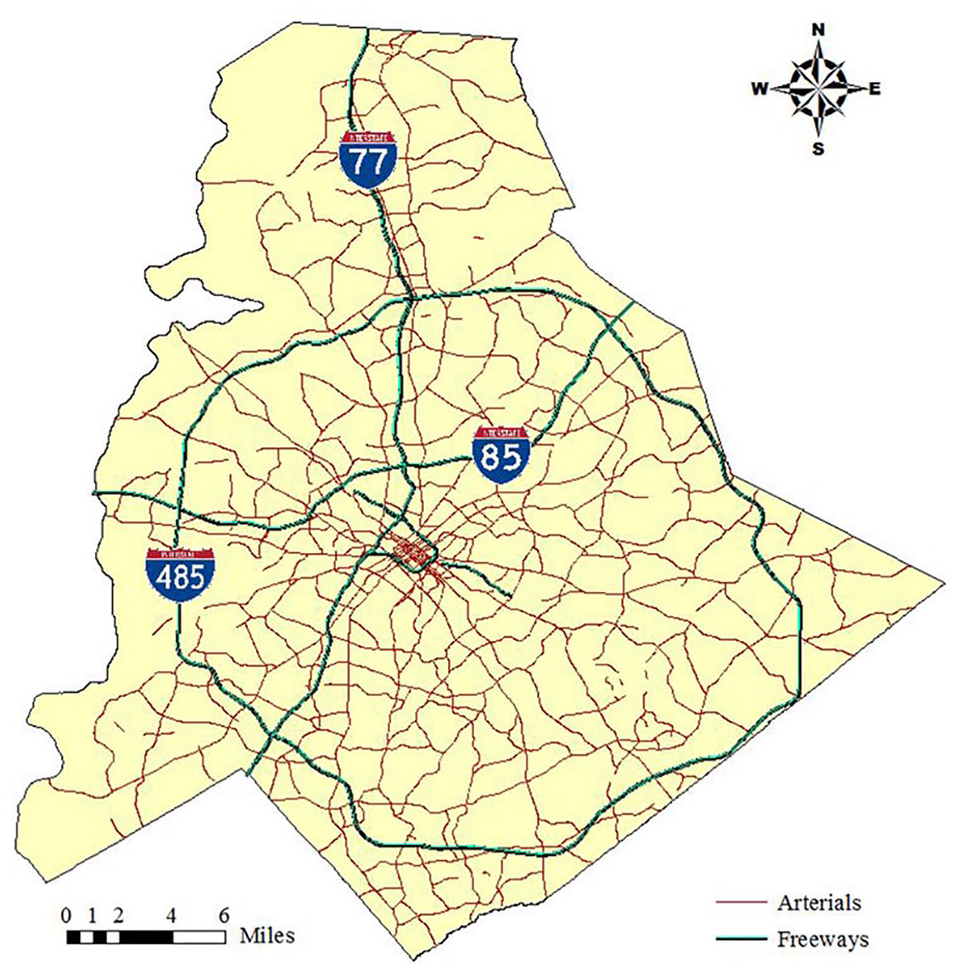
Charlotte-Mecklenburg county.
Operationalizing Active Failure
Active failures are the routine slips and lapses that can be expected to occur across a population as a result of ordinary human fallibility and can be understood as a product of the number of people in an area and the amount of travel that they do. To account for the influence of active failure, we used two variables: million vehicle miles traveled (MVMT) and block group population, which is a proxy for trip generation.
MVMT: MVMT was calculated by obtaining average annual daily traffic volumes (AADT) from the North Carolina State Department of Transportation. AADT is reported for point locations. To convert AADT to VMT, we assigned AADT to the street segments contained in the block groups and then multiplied AADT by the segment length. At locations with more than one AADT count (i.e., two point locations), we assigned the street segment to the closest available count, splitting street segments at the midpoint where necessary. This process gave us daily VMT for the street segments. These were summed to get daily VMT for each block group. To convert this to MVMT for the study period, we multiplied the daily VMT by 365 (days) and 3 (years) and then divided by one million. Note that the values pertain to the total VMT for both directions of traffic on each street segment.
Population: Information on population at the block group level was acquired from the U.S. Census. More people would be expected to generate more travel, regardless of mode, and thus create more crash-producing slips and lapses.
Operationalizing Latent Error
Latent errors occur when an environment fails to cognitively prime schema and scripts that prepare road users to respond to potential traffic hazards. While conventional crash data do not provide us with information on cognition, we can nonetheless infer the presence of misapplied scripts and schema as a product of the crashes that occur in relation to specific environmental features, over and beyond those crashes already accounted by measures of active failure.
For the purposes of this analysis, we defined latent conditions as those environmental features that create conflicting travel movements between multiple road users. If crashes are principally a function of active failure, as is currently presumed in the United States (American Association of State Highway and Transportation Officials [AASHTO] 2010, 2011), these environmental features, which include intersections, commercial parcels, and bus stops, should have little, if any, influence on crash incidence. Nonetheless, if road users are applying an incorrect set of schema and scripts, then these elements would be expected to result in a measurable increase in traffic-related crashes, injuries, and deaths. We operationalized these variables as follows:
Four-or-more-leg intersections: Four-or-more leg intersections are locations where opposing streams of traffic cross, thus creating locations where conflicts between opposing streams of traffic, and thus traffic crashes, are more likely to occur (Ben-Joseph 1995; Dumbaugh and Rae 2009; Ladrón de Guevara, Washington, and Oh 2004; Lovegrove and Sayed 2006; Marks 1957). To calculate this measure, we used street network data provided by Mecklenberg County and identified every intersection point location with four-or-more legs. These were then summed to the block group level.
Commercial parcels: Commercial parcels likewise create traffic conflicts through their use of driveways for street network access, which function as de facto intersections. Using parcel-level data provided by the Mecklenberg County tax assessor’s office, this variable is the sum of the number of unique commercial parcels contained in each block group.
Bus stops: Bus stops can create traffic conflicts by attracting and distributing pedestrians at points along the street network, creating concentrations of activity that may lead to conflicts between vehicles and pedestrians. They may further create traffic conflicts at locations where the bus stops in the outside travel lane (i.e., online locations), which may in turn encourage drivers to attempt to maneuver around the stopped bus, resulting in sideswipe and rear-end collisions with adjacent vehicles (Amoh-Gyimah, Saberi, and Sarvi 2017; Chin and Quddus 2003; Rhee et al. 2016). Our bus stop variable is the sum of the number of individual bus stops located within each block group.
Moderating Latent Conditions: Safe Systems Elements
If the built environment can establish latent conditions that induce mistakes, it is equally plausible that the design of the built environment can reduce their occurrence. Safe Systems and Vision Zero proponents have called for reducing vehicle speeds on urban surface streets to thirty-five miles per hour (MPH) or less (Vision Zero Network 2018), as well as reducing the number of through-lanes along urban streets to four-or-fewer (National Association of City Transportation Officials [NACTO] 2013, 2016). Neither assertion is backed by direct empirical evidence of their effects on crash frequency and severity, but instead on the rationale that more constrained environments encourage drivers to exercise additional care. Restated in terms of the cognitive framework described above, these elements encourage the adoption of environmentally appropriate scripts and schema. If this is true, then one would expect these elements to lead to observable reductions in not only the incidence of injurious and fatal crashes (which are a function of impact speed) but also total crash incidence. To determine the validity of these assertions, we included two additional variables in the model:
Percentage of streets with four-or-fewer through lanes: This variable is the mileage of non-freeway streets with four-or-fewer through lanes, divided by the total number of non-freeway streets in the block group.
Percentage of streets with speeds less than thirty-five MPH: This variable is the mileage of non-freeway streets with posted speeds of thirty-five MPH or less, divided by the total mileage of non-freeway streets in the block group.
Dependent Variables: Total and KAB Crashes
To understand the influence of these variables on crash incidence, we used three years of crash data (2012–2015) for this analysis to account for regression-to-the-mean effects that may influence our estimates (Hauer 1997; Hauer and Persaud 1983). Because we were interested in the role of the built environment on the creation of latent conditions, we examined crashes occurring on surface streets exclusively. Crashes occurring on interstates and freeways, where access is governed by on- and off-ramps, and which principally serve through-moving motorists, are excluded from this analysis.
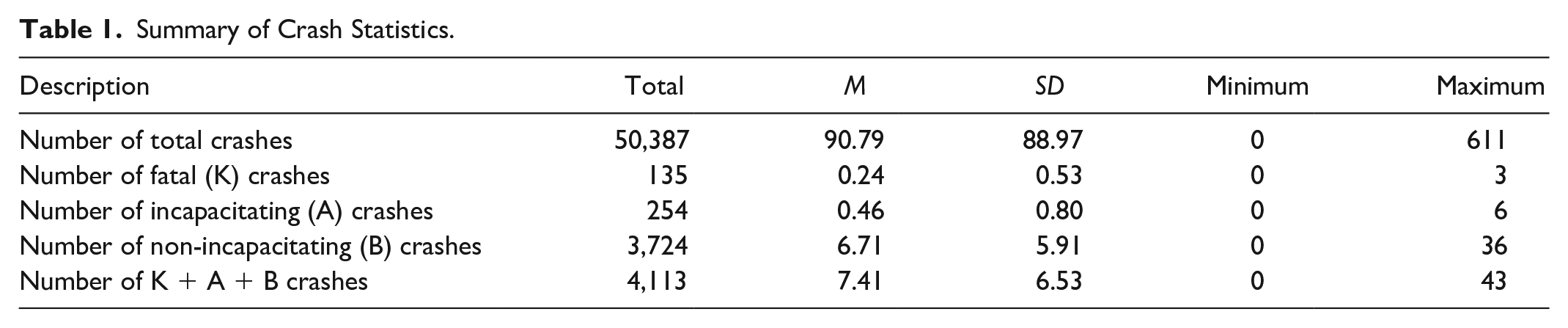
A total of 50,387 crashes occurred on surface streets in the study area between 2011 and 2013. This includes 135 fatal crashes, 254 incapacitating injury crashes, 3,724 non-incapacitating injury crashes, 14,276 possible injury crashes, 29,761 property damage only crashes, and 2,327 non-traffic injury crashes. These crashes were aggregated into two dependent variables: total crashes, which are the sum of all crashes listed above, and “KAB” crashes, which includes fatal (K), incapacitating injury (A), and non-incapacitating injury (B) crashes.
To account for the influence of the built environment, we aggregated census data, street network data, and parcel-level land use data to the block group level. A major issue with aggregating data to the block group level is that census geographies are typically bounded by major roadways, such as arterials, which do not align perfectly with block group boundaries. Furthermore, variations in geo-location can result in crashes, which are point features, not aligning with streets, which are line features. We addressed this issue using the methodology detailed in Dumbaugh, Rae, and Wunneburger (2011), running a 200-ft buffer (roughly the width of a fully designed principal arterial) around each block group, with the goal of accounting for errors in geo-location.
Nonetheless, this approach may bias our model results based on the crash history of a handful of high-crash streets or intersections. To remedy this problem, we conducted a random assignment process for assigning border crashes to block groups using a two-step process. First, an array of numbers was generated such that duplicate crashes had identical numbers. We randomly assigned these crashes to block groups, retaining only the first observation and deleting all duplicate counts. Table 1 provides descriptive statistics for the block groups in this study.
Summary of Crash Statistics.
Model Specification
Crashes are discrete, non-negative, and independent events. Poisson and negative binomial error distributions are typically adopted for modeling crash count data. However, the assumption of the Poisson distribution is that the mean equals the variance. Crash data are oftentimes found to exhibit extra variation, or overdispersion (i.e., variance mean). Negative binomial models are better able to account for overdispersion in crash data and are therefore applied here. The coefficients for negative binomial models report the percent change in the dependent variable associated with each unit increase of the independent variables (Hilbe 2007).
Model Results
Tables 2 and 3 present our model results. As expected, population and VMT, the variables that serve as a proxy for slips and lapses, were associated with the increased incidence of total and KAB crashes, though population did not prove to be a significant variable at the 0.05 level of confidence. Nonetheless, their influence on total and KAB crash incidence is not great. Adding a million miles of additional VMT to a block group would only be expected to produce a 0.39 percent increase in total crashes and 0.48 percent increase in KAB crashes. To put this in perspective, the average block group accommodated roughly 48 million miles of VMT during the three-year study period. Doubling the typical block group’s VMT to 96 million miles would have only a slight effect on the incidence of KAB crashes, which would be expected to increase from 2.46 to 3.10 over the three-year study period.
Total Crashes.
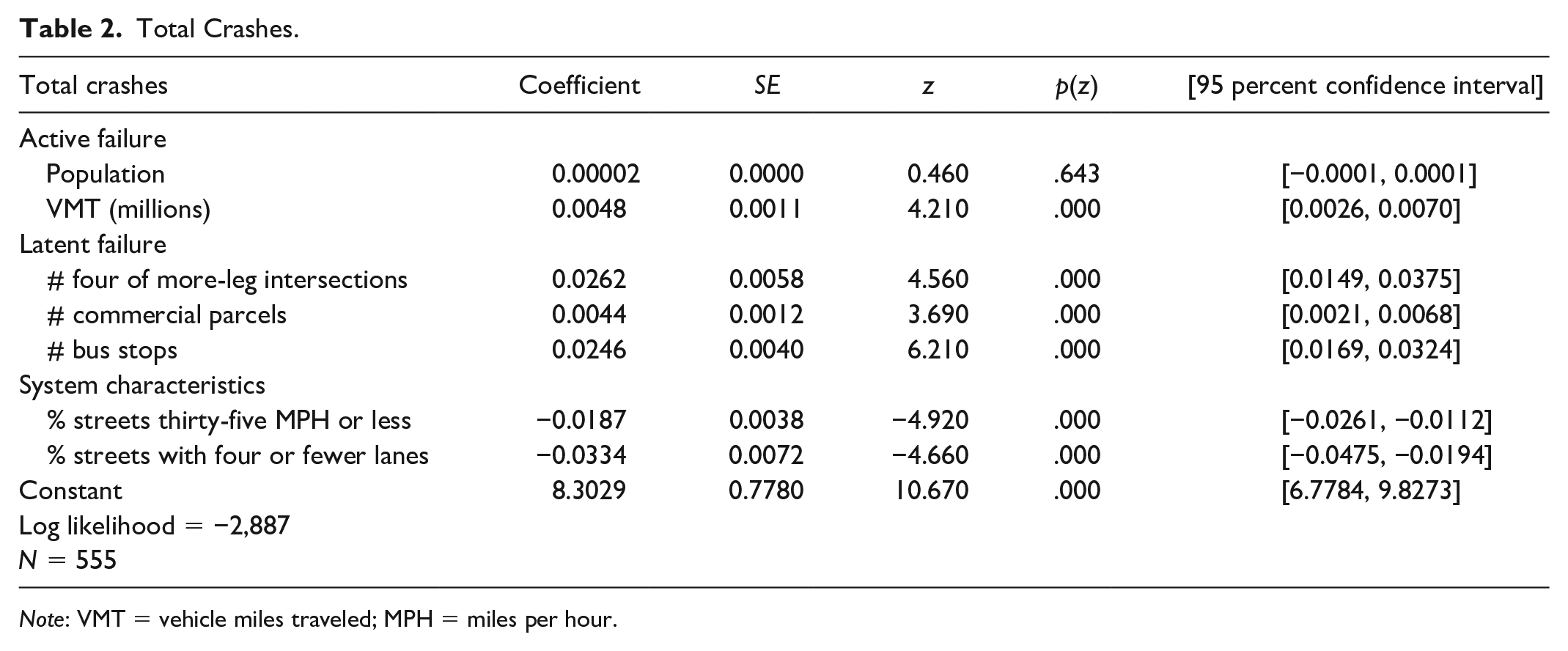
Note: VMT = vehicle miles traveled; MPH = miles per hour.
KAB Crashes.
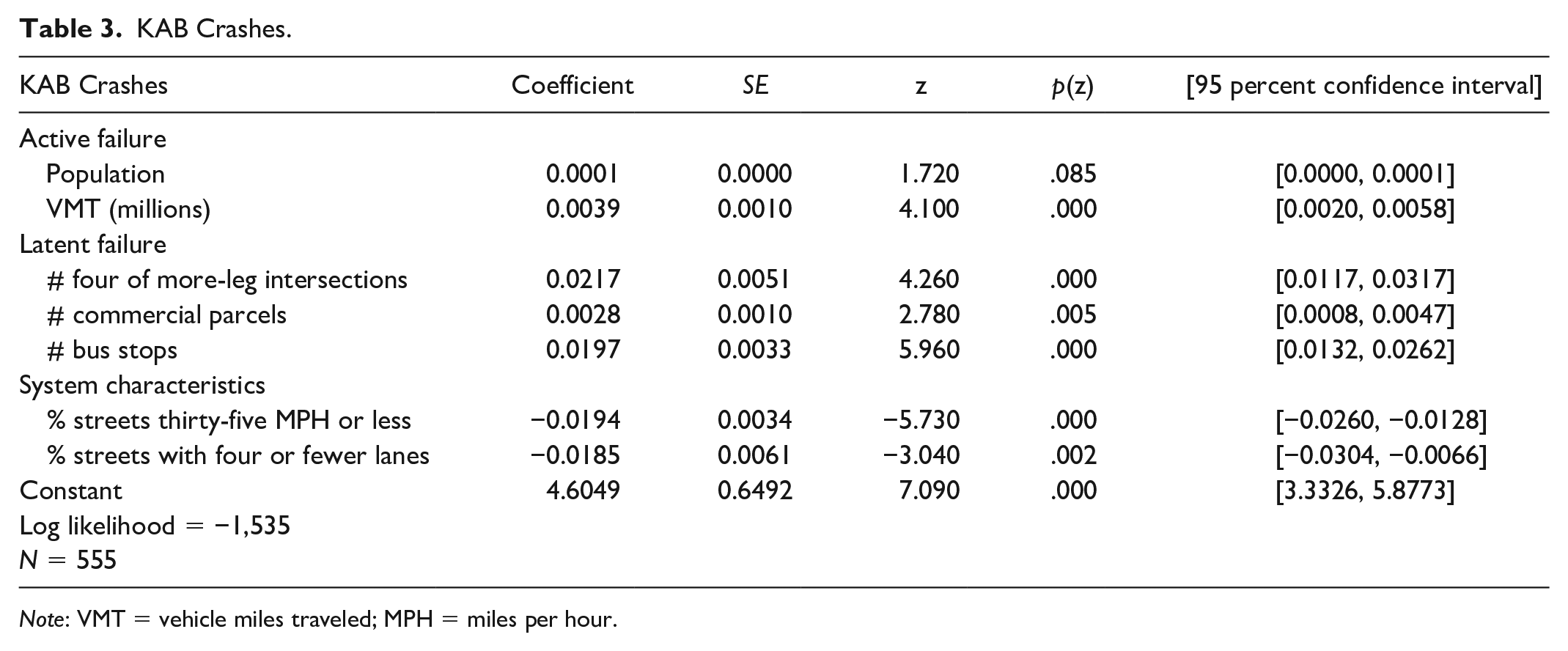
Note: VMT = vehicle miles traveled; MPH = miles per hour.
The variables associated with latent conditions have a far greater influence on crash incidence. Each four-or-more leg intersection is associated with a 2.6 percent increase in total crashes, and a 2.2 percent increase in KAB crashes. Each commercial parcel is associated with a 0.44 percent increase in total and 0.28 percent increase in KAB crashes, which is roughly comparable to the safety effects of adding one million additional vehicle miles traveled in each block group. Each bus stop is associated with 2.5 percent increase in total crashes, and 2.0 percent increase in KAB crashes, roughly the equivalent of adding an additional four million VMT to these block groups. Stated another way, environmental conditions that create conflicts between different street users, a proxy for latent conditions, are associated with large and statistically significant increases in total and KAB crashes.
The two “safe systems” variables included in the model proved moderate effects. Because the independent variables were modeled as percentages, the model results can be interpreted as elasticities, and the results are elastic. A 1 percent increase in the percentage of streets with posted speeds of thirty-five MPH or less is associated with a 1.9 percent reduction in both total crashes and KAB crashes; a 1 percent increase in the lane mileage comprising four-or-fewer lanes is associated with a 3.3 percent reduction in total crashes and 1.8 percent reduction in KAB crashes.
Toward Safe Systems: A Cognition-Centered Approach to Traffic Safety
At present, crash prevention is based on the presumption that traffic crashes are a product of innate human fallibility, fallibility to be addressed principally through driver education and law enforcement programs. The recent emergence of Safe Systems has nonetheless encouraged safety professionals to move beyond such simplistic perspectives on crash causation and to begin examining and addressing the nature of the behaviors that result in traffic crashes (ITF 2016; ITF 2008).
In this study, we have sought to understand the nature of crash causation on urban streets, paying particular attention to the cognitive mechanisms that may induce—or prevent—the behaviors that transform latent conditions into a crash event. Research in the areas of organizational systems safety, cognitive psychology, and behavioral economics provide important insights into the central role of cognition in crash incidence, though these insights have not, to date, been meaningfully integrated into safety practice.
Doing so requires the development of a new framework for understanding crash causation, one which places human cognition at its center. As illustrated in Figure 4, the built environment shapes the schema and scripts applied by road users, which in turn influences their exposure to crash risks during the course of their travel. Latent conditions emerge when the design of the built environment induces schema and scripts that are inappropriate for a specific operating environment. These entail more than simply the choice of higher-than-desirable operating speeds; they can prime a motorist to identify and adequately respond to the presence of hazards in their environment, or they can render these hazards cognitively invisible.
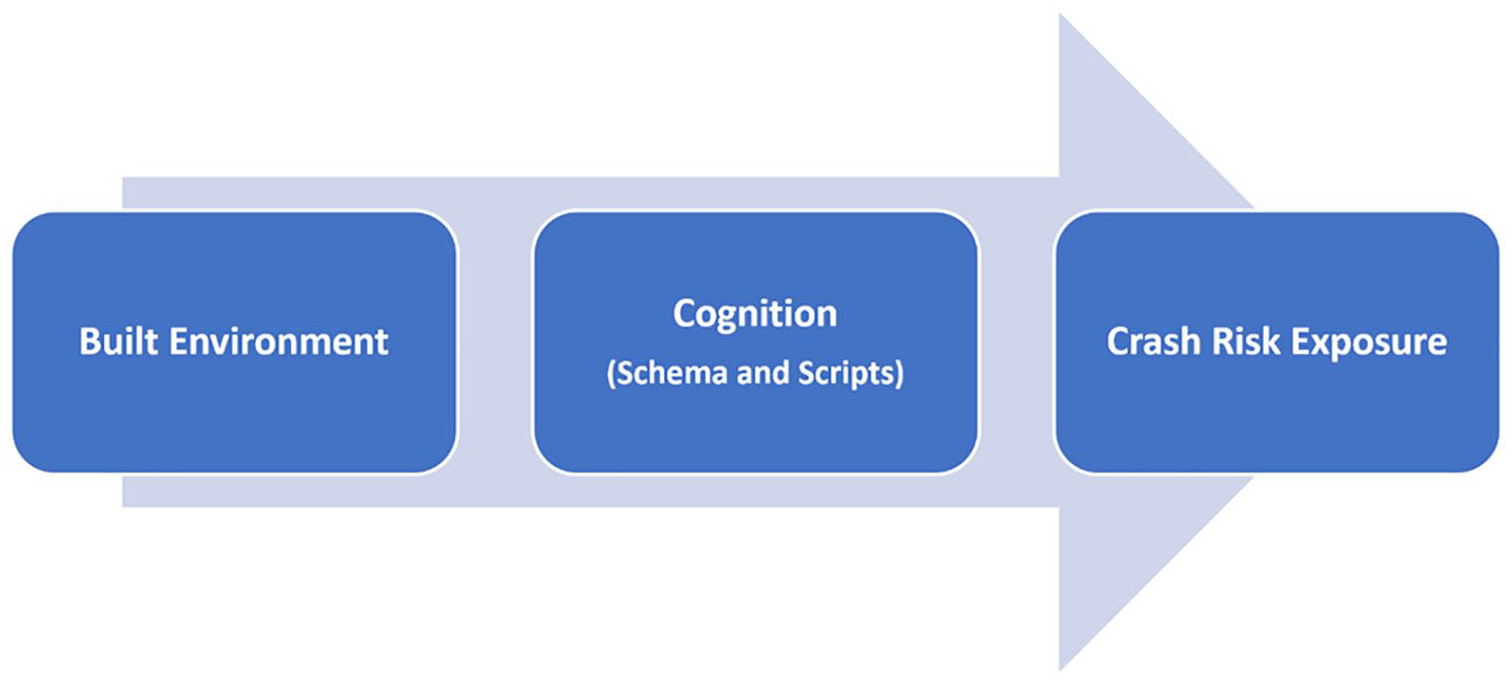
A cognition-centered approach to crash prevention.
We understand some basic components of the outcomes of these cognitive processes, such that dense development adjacent to the right-of-way leads is associated with lower operating speeds (Harvey and Aultman-Hall 2015; Smith and Appleyard 1981; Theeuwes 2012). Yet the further development of our understanding of the role of cognition will require new research methods. Conventional sources of safety data, such as those used in this study, are useful for identifying the outcomes of these cognitive processes—that is, environmentally based variations in crash incidence—but they are incapable of detailing these processes themselves. This will require moving beyond the statistical analysis of large datasets, and to begin examining how design influences the behaviors and understandings of real-world human subjects.
Moving forward, we need to develop our understanding of how the built environment may prime specific scripts and schema in human drivers, and how those scripts and schema may, in turn, influence crash frequency and severity. These may entail psychological studies that task subjects with road scene interpretation, which can in turn be used to identify the salient environmental features that govern the adoption of specific schema and scrips, or the use of driving simulators to capture human behavioral responses to different design scenarios.
We believe that latter approach, which permits researchers to develop and test specific environmental stimuli, will provide to be a particularly fruitful approach. In an interesting study of driver cognition and behavior, van der Horst and Kaptein (1998) used a simulator to demonstrate that differing the marking configurations for lanes, centerlines, and shoulders influences speed choice, as well as driver expectations governing the selection of a “safe” speed. Such an approach, when combined with variations in the roadway’s developmental context and the simulation of common urban crash scenarios during the simulation routine, such as an abrupt vehicle or pedestrian crossing, would likely yield highly useful results for understanding how cognitive expectancy may establish, or prevent, latent error. Conventional simulators allow researchers to capture driver reaction times and braking response following the introduction of a traffic conflict, while readily available biometric tools, such as eye-tracking monitors, can be further added to capture visual fixations in order to identify the specific features within the simulation that drivers are using to establish their behavioral routines.
Implications for Practice
If latent errors are indeed a primary determinant of the incidence of traffic-related death and injury, then planning and policy decisions regarding the location and configuration of future development may have a profound long-term impacts on traffic safety. Development prescription contains regional development plans, zoning ordinances, and subdivision regulations which can lead to the creation of environments that establish specific—and predictable—patterns of road user behavior. The decision to zone an arterial for commercial or retail use, for example, is not a safety-neutral proposition. This future development will require access and egress, change the user mix of the thoroughfare, and result in patterns of behavior that may make crash events more—or less—likely to occur. Figure 5 depicts causal pathway through which latent error may be embedded into the transportation system through the planning and design processes.
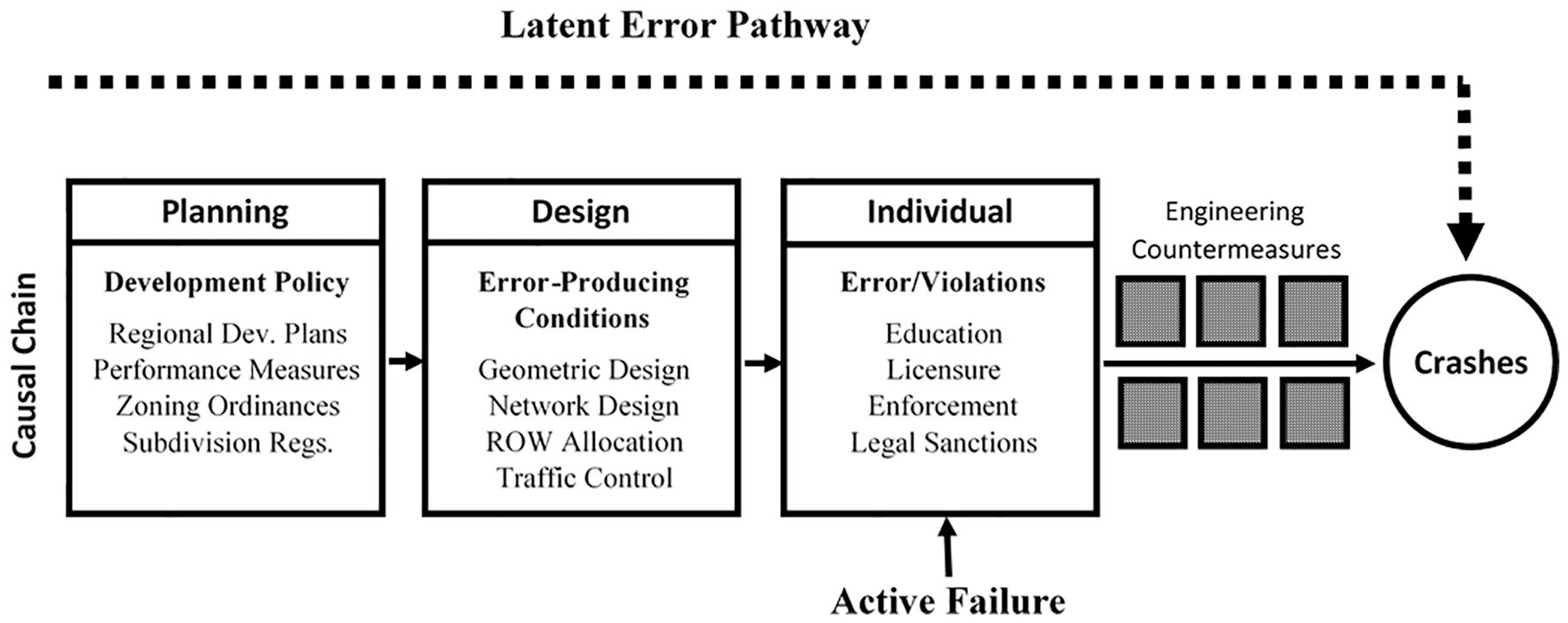
Planning, design, and the path of latent error.
Similarly, transportation performance measures such as vehicle delay or level-of-service, which are the primary measures of transportation system performance (Shaw 2003), encourage the advancement of transportation projects that add lanes, increase speeds, of both, often without regard to a street’s developmental context. Indeed, conventional safety guidance, such as AASHTO’s (2010) Highway Safety Manual, does not regard number of lanes, developmental context, or its road user mix as having any influence on safety outcomes, ostensibly from the belief that road users are individual responsible for the commission of these errors, and would do so regardless of the characteristics of the transportation system. The result is that capacity-expanding projects are able to advance through planning and design processes with little substantive regard for their influence on road user behavior and the resulting safety consequences.
The NACTO (2013) and the Institute of Transportation Engineers (2010) have sought to remedy the resulting safety problems at the design level through the development and promotion of new “context-sensitive” street design guidance. Nonetheless, there would be little need for post hoc design interventions if safety considerations were embedded into the earliest phases of the planning and project development process. Correspondingly, we believe Figure 5 is as useful as a prescriptive model for advancing safe systems. By illustrating the pathway through which the conditions for latent error are established, it also identifies opportunities for proactively identifying planning-level decisions than be expected to led to negative safety consequences, such as the adoption of land use codes encouraging future developmental growth in areas with concentrations of commercial uses and higher speed arterial systems.
Indeed, practitioners seeking to proactively identify how future development scenarios may affect annual crash incidence can simply insert block group-level forecast values into the regression equations emerging from the models presented in Tables 2 and 3:
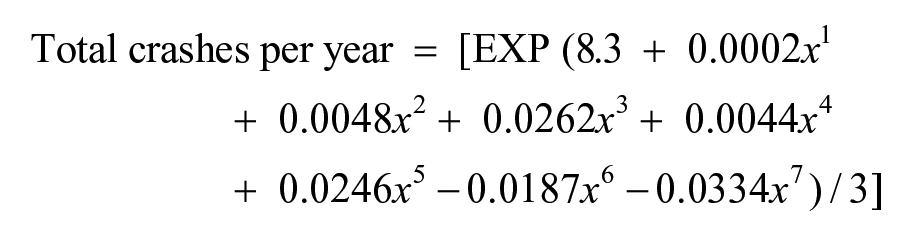
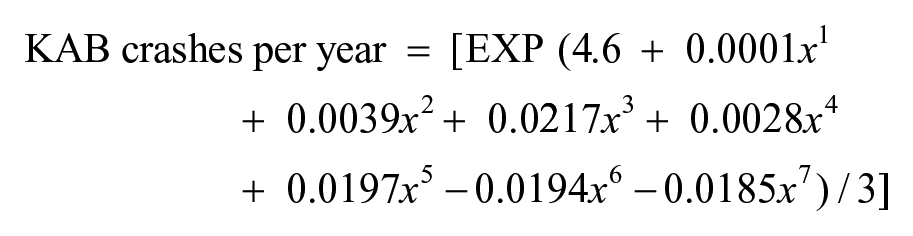
where x1 = forecast population; x2 = forecast VMT (millions); x3 = forecast # of intersections; x4 = forecast # of commercial parcels; x5 = forecast # of bus stops; x6 = forecast % of streets with limits of 35 MPH or less; x7 = forecast % of streets with four or fewer lanes.
While the resulting predictions will be necessarily inexact and pertain specifically to Charlotte-Mecklenberg County, previous research suggests that the risk factors observed for Charlotte-Mecklenberg County are not dissimilar to those found in other regions throughout the United States. As such, we believe these models are an enormously useful mechanism for identifying—and thus preventing—the emergence of future safety problems that may occur as a result of broader development policies.
We thus conclude on an optimistic note. The planning profession is currently in the midst of a widespread re-assessment of its role in advancing traffic safety. In the last five years, more than thirty cities in the United States have adopted Vision Zero as a policy goal, which calls for the complete elimination of traffic-related deaths and injuries (Vision Zero Network 2018). While the success of Vision Zero policies remains to be seen, it nonetheless heralds a new commitment to advancing traffic safety as a central planning concern. This is an opportune time for the profession to revisit the mechanisms through which planning decisions influence traffic safety outcomes and it is our hope that the results of this study provide a useful means for doing do.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported, in part, by a grant from the United States Department of Transportation through the Collaborative Sciences Center for Road Safety.