
Abstract
Merging situations in work zones often introduce elevated safety risks because of dynamic lane configurations, temporary traffic controls, and the complex, rapid decision-making required by drivers in controlled environments. Previous research has analyzed driver safety perception in work zone areas; however, limited attention has been paid to understanding how the perceived level of safety relates to driving behavior in work zone merging. This study addresses this gap by examining how individual differences in driving behavior are associated with drivers’ perceived safety when navigating merging maneuvers in work zones. An online survey was conducted on 333 drivers in Australia and the UK, gathering data on driver safety perceptions for 16 simulated merging scenarios. Respondents also completed a Driver Behavior Questionnaire. In a two-step analysis methodology, a principal component analysis (PCA) was first employed to reduce the dimensionality of the data and extract underlying behavioral and perceptual constructs. A generalized estimating equations regression model was then developed to determine the associations between safety perception and the components obtained from the PCA. The results showed that drivers prone to cognitive errors felt less safe when surrounded by more than two vehicles, and the aggression and violation traits had less effect on safety perceptions. Younger and male drivers feel safer in potentially risky situations. The results offer a data-driven basis for improving risk assessment frameworks and tailoring driver-targeted interventions in work zones.
Introduction
Work zones are essential for infrastructure maintenance and enhancement; however, they remain a hazardous segment of the road network because of their dynamic layout and temporary traffic control measures ( 1 ). Among the different sections of a work zone, the merging area has been pinpointed by researchers as the area with the highest crash risk ( 2 – 4 ). Continual speed discrepancies and complex driving behavior in merging areas make driving more difficult than driving in normal road sections. These features introduce a higher level of complexity to the driving task, particularly during lane closures, where drivers must execute merging maneuvers in the presence of surrounding traffic ( 5 , 6 ).
The existing literature has recognized the significant variability in driver behavior within work zones ( 7 , 8 ). Factors such as age, gender, and driving experience influence drivers’ decisions when navigating complex scenarios such as late merging, abrupt decelerations, or acceleration through narrowing lanes ( 8 ). In a recent study, participants were categorized by age, gender, and profile ( 8 ). This was performed to establish an appropriate categorization technique to be used to readily identify and compare gaze and driving performance differences within the sample population. This approach highlights that driver profiles play a significant role in safe driving and safety perception.
In work zone research, drivers’ safety perception plays a crucial role in understanding crash risks and improving safety. A typical approach to studying this involves administering questionnaires that assess drivers’ views on various work zone attributes, such as geometric changes, temporary traffic controls, and speeding. Several questionnaire-based studies have attempted to capture these differences using structured questionnaires ( 9 , 10 ). Not being limited to the standard questionnaires, researchers further use techniques such as the Driver Behavior Questionnaire (DBQ) for advanced clustering of driver profiles ( 11 – 13 ). The use of the DBQ offers several methodological advantages in the study of road safety and driver psychology. It provides a structured, cost-effective means of collecting data from a large, diverse pool of respondents, facilitating robust statistical analysis. Through self-reported measures, these questionnaires enable the examination of latent psychological traits such as slips, lapses, mistakes, unintended violations, and deliberate violations ( 11 ). Furthermore, standardized questionnaire designs ensure consistency across respondents, enabling valid comparisons across demographic groups and study contexts. This approach enhances the depth of behavioral insights and supports the integration of psychological dimensions into predictive modeling frameworks for traffic safety analysis.
Merging maneuvers can be mentally demanding for drivers because they require the constant coordination of speed, acceleration, and lane positioning. This task becomes even more complex when factors such as surrounding vehicles and available gaps must also be considered ( 14 ). Familiarity with work zone setups, combined with negative experiences such as delays, frustration, and aggressive driving behaviors, may influence how drivers approach merging maneuvers, potentially leading to riskier decisions during critical merging situations ( 10 ). However, actions such as blocking or preventing a vehicle from merging have been linked to aggressive driving behavior ( 15 ), highlighting the importance of understanding behavioral influences on safety perceptions in constrained traffic environments.
Drivers’ safety perception plays a key role in traffic maneuvers, especially during merging in controlled environments. Researchers have examined the relationship between driving behavior and safety perception across various aspects. For example, a study has been carried out to analyze the relationship between risk perception and crossing behavior of drivers at unsignalized intersections ( 16 ). The relationship between driver safety perception and driving behavior in hazardous scenarios on expressways has also been examined in the literature ( 17 ). Bharadwaj et al. studied the types of driver behavior that have the highest level of crash risk in work zones ( 18 ).
The current literature provides valuable insights into how driver behavior and safety perception interact in general traffic environments; these relationships remain underexplored in work zones, where drivers face constrained space, altered lane configurations, and frequent speed changes. The unique cognitive and environmental demands of work zone merging suggest that findings from conventional roadway settings may not directly apply. Therefore, this study aims to bridge this gap by examining how underlying driving behavior traits influence safety perception during merging maneuvers in work zones, offering context-specific evidence to support safer work zone management and driver education strategies. Specifically, this study examines the research question of whether drivers with distinct behavioral tendencies, such as cognitive–perceptual errors, competitive driving, and deliberate violations, differ in their perceived safety across varying traffic densities in work zone merging scenarios.
The behavioral constructs examined in this study are conceptually grounded in Reason’s Human Error Theory ( 11 ) and the Theory of Planned Behavior ( 19 ). According to the error theory, driver errors can be categorized into lapses, mistakes, and violations, reflecting cognitive and motivational dimensions of driving behavior and aligning with the components derived from the DBQ. Similarly, the Theory of Planned Behavior suggests that drivers’ actions are influenced by their attitudes, perceived behavioral control, and subjective norms. Together, these frameworks help explain how underlying behavioral tendencies can shape drivers’ perceptions of safety in complex traffic environments, such as work zones.
This study analyzed questionnaire responses from drivers in Australia and the UK. Participants reported their safety perceptions across unique work zone merging scenarios and provided information about their day-to-day driving behaviors. Principal component analysis (PCA) was employed to reduce the dimensionality of the data, yielding distinct components that represent merging scenarios and driver behavior traits. These components were subsequently used in generalized estimating equations (GEEs) models to explore the influence of driver behavior on safety perceptions during work zone merging.
Methods
Data Collection
Data were collected via an online survey designed to explore drivers’ perceptions of safety across various work zone merging scenarios. The main purpose of the survey was to investigate how surrounding vehicle configurations influence perceived safety when a driver is required to merge. Extending the core purpose of this study, the survey also included a DBQ to classify respondents by their day-to-day driving behavior patterns. A 20-question version of the DBQ ( 13 ) was used in this survey.
To gather driver perception on merging situations, respondents were presented with 16 distinct scenarios (two example scenarios are shown in Figure 1). Each scenario involved a lane closure that necessitated a merge into an adjacent lane. The scenarios differed based on the vehicles surrounding the respondent’s vehicle. The surrounding vehicle combinations included different types of leading vehicles in the current lane (CL), following vehicle in the current lane (CF), leading vehicle in the target lane (TL), and following vehicle in the target lane (TF). The illustrative example shown in Figure 1 explains an included scenario presented under the Australian and UK temporary traffic management guidelines. The scenario illustrates a situation where the merging vehicle is surrounded by a heavy vehicle as CL, a car as CF, and two cars as TL and TF. The vehicle arrangements were systematically arranged to represent different surrounding vehicle scenarios.
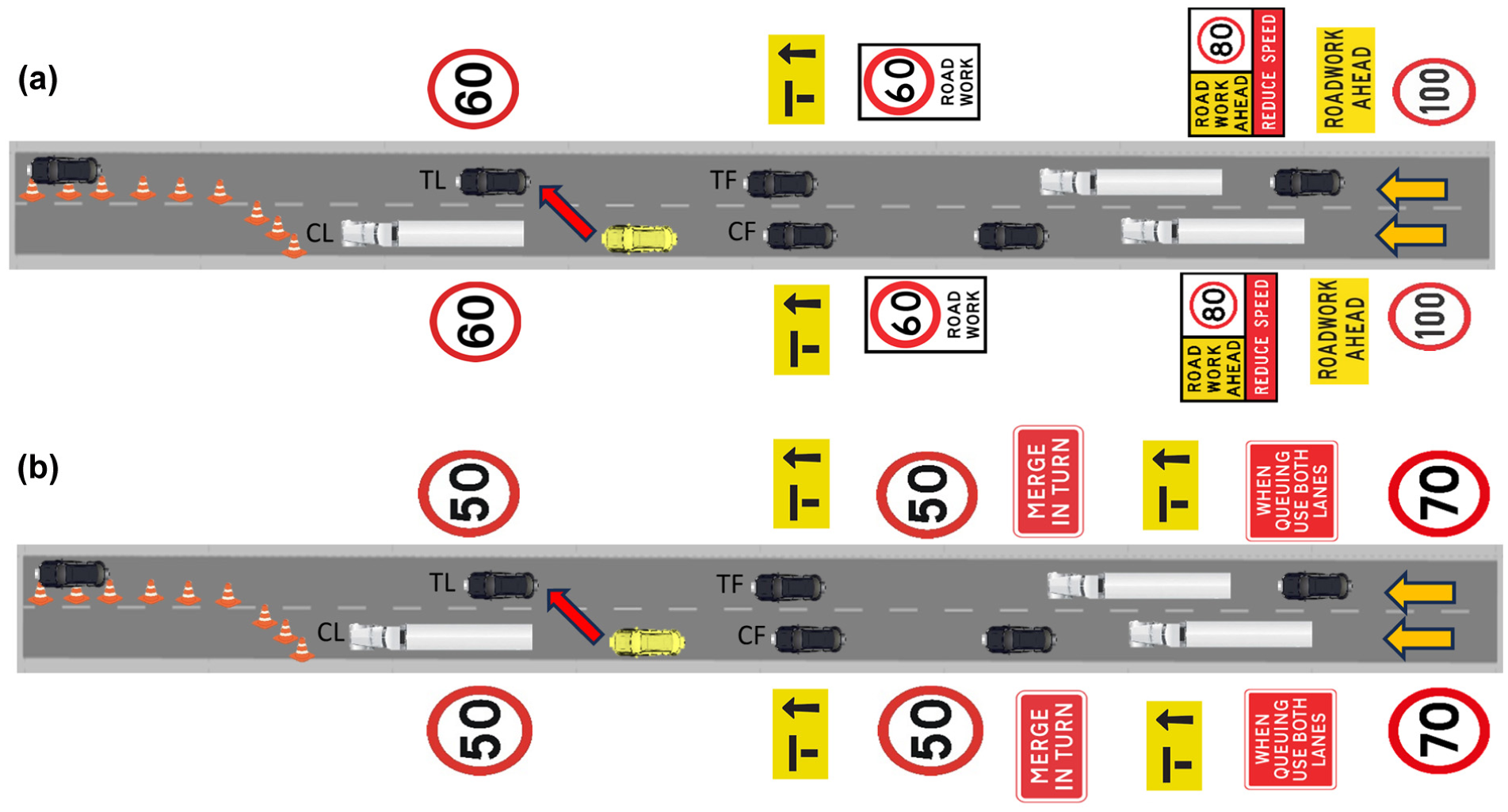
Two examples from the 16 scenarios included in the survey: (a) Australian version; and (b) UK version.
The survey was conducted on the Qualtrics platform and distributed to a broad population of drivers in Australia and the UK. Recruitment strategies included sharing the survey on social media, paid advertisements on Facebook aimed at licensed drivers in both countries, Coventry University newsletters, and flyers in public areas of both universities. In addition, support was received from the Traffic Management Association of Australia and the Australasian College of Road Safety to advertise the survey in their newsletters. To encourage participation, the survey was optimized for computer monitors and smaller devices, including smartphones and tablets, allowing respondents to complete it at their convenience. Participants were invited to enter into a lucky draw, with 15 winners from each country receiving an AUD 30 gift voucher (GBP 15). This study received approval from the Human Research Ethics Committee of Deakin University (approval number: SEBE-2023-61-MOD01) and Coventry University (approval number: P165485).
More than 600 responses were initially collected; however, after removing partially completed responses and responses from participants who did not meet the study’s inclusion criteria, 333 valid responses were retained for analysis.
Statistical Analysis
This study employed a two-stage analytical approach composed of PCA followed by GEEs modeling to investigate the underlying structure of driver behavior and its associations with demographic and experiential characteristics in work zone settings.
Principal Component Analysis
The data collected involved many variables, including 20 DBQ items and 16 merging scenarios. The DBQ items targeted a variety of behavioral traits, while the scenarios varied based on surrounding vehicle configurations. To manage this complexity, PCA was used to reduce the dimensionality of the variables ( 20 ). The PCA helped group the DBQ items into a smaller set of behavioral components that could be used as independent variables. Similarly, it allowed the safety perception scenarios to be grouped into underlying factors, making them more suitable as dependent variables in the modeling process.
PCA has been widely applied in general traffic behavior studies; its application in work zone-specific contexts remains limited, to the best of the authors’ knowledge. Work zones present a unique combination of spatial constraints and complex driving patterns, which may lead to different behavioral profiles compared to normal driving conditions. Furthermore, the interaction of these latent behaviors with driving behavior patterns and demographic variables needs to be systematically examined in merging scenarios in work zones.
The PCA of the DBQ items and safety perception questions began with standardizing the Likert scale values and safety perception ratings obtained from the online questionnaire. Although all DBQ questions are on the same five-point Likert scale, variation across items may differ, indicating some might be more skewed or have different variances. Given that PCA is sensitive to differences in variances, standardizing the values ensures that each variable contributes equally to the analysis.
Once the responses are standardized using z-score values, suitability for the PCA was analyzed. This process ensures that 20 Likert scale variables are appropriate for dimension reduction using PCA. Suitability is measured through three key variables: (1) the Kaiser–Meyer–Olkin (KMO) measure of sampling adequacy; (2) Bartlett’s test of sphericity; and (3) a correlation matrix. For the data set, the KMO was 0.9, which illustrates that the data set is suitable for further analysis ( 20 ). The data set obtained a significance of p < 0.01 in Bartlett’s test of sphericity, which satisfies the significance requirements. Because the 20 Likert scale items and safety perception ratings tap into related psychological constructs (e.g., safety and risk), using Obliging with Kaiser Normalization is theoretically justifiable and often more realistic. Therefore, PCA was performed based on Oblimin with Kaiser Normalization ( 20 ).
PCA was employed to reduce the dimensionality of driver behavior and safety perception variables and to identify representative components for further modeling. PCA was preferred over exploratory factor analysis because the objective was to summarize observed variables and extract components that explained the maximum variance, rather than to infer latent psychological constructs. The number of components to retain was determined using eigenvalues greater than one and the cumulative variance explained. Based on these criteria, six components were retained, capturing the major behavioral dimensions relevant to this study. Factor scores for components related to driver behavior were considered independent variables, while factor scores for components related to safety perceptions were considered dependent variables. The next step was deciding which questions fall under the components. It was conducted targeting the questions with loading values > |0.4| or |0.5| at the pattern matrix ( 20 ). They are considered strong associations.
Factor loadings illustrated a distinct difference between safety perception and driver behavior questions, leading to clustering safety perception questions into two components and driver behavior questions into four components. Because this study aimed to analyze the influence of driver behavior on safety perceptions, along with demographics, the components related to safety perception were used as dependent variables and those related to driver behavior as independent variables.
Regression Modeling
For the subsequent modeling, GEEs were applied with an exchangeable working correlation structure, which assumes a constant correlation among repeated measures from the same respondent. This structure yielded a lower quasi-likelihood under independence model criterion (QIC) compared with alternative structures, ensuring a better model fit.
The GEEs approach was chosen primarily because it is well-suited for analyzing correlated response data, such as repeated measurements or clustered responses from the same participants ( 21 ). In this study, each respondent provided behavioral ratings on multiple dimensions. Unlike traditional regression models that assume independence, GEEs account for within-subject correlations, ensuring more robust and consistent estimates of the population-averaged effects.
Mixed-effects models (e.g., linear mixed models or multilevel models) are another popular option for handling such correlated data; they are primarily designed to estimate subject-specific effects and rely on assumptions about the distribution of random effects ( 22 ). In contrast, this study does not focus on individual-specific predictions but rather on understanding population-level trends and associations between demographic/experiential factors and latent behavioral components. The GEEs offer a more direct and assumption-light approach for estimating these marginal (population-averaged) effects, which align with this study’s goals.
Given the PCA results on safety perception across different scenarios, two separate models were developed. The dependent variables in each regression model were the factor scores of two components derived from the PCA: (1) FAC1_1 (safety perception while merging under more than two surrounding vehicles); and (2) FAC3_1 (safety perception while merging under two or fewer than two vehicles). The regression models were estimated using maximum likelihood, and robust standard errors were computed to account for potential heteroskedasticity. Table 1 illustrates the descriptive statistics for the independent variables considered in the GEEs.
Descriptive Statistics of Model Variables
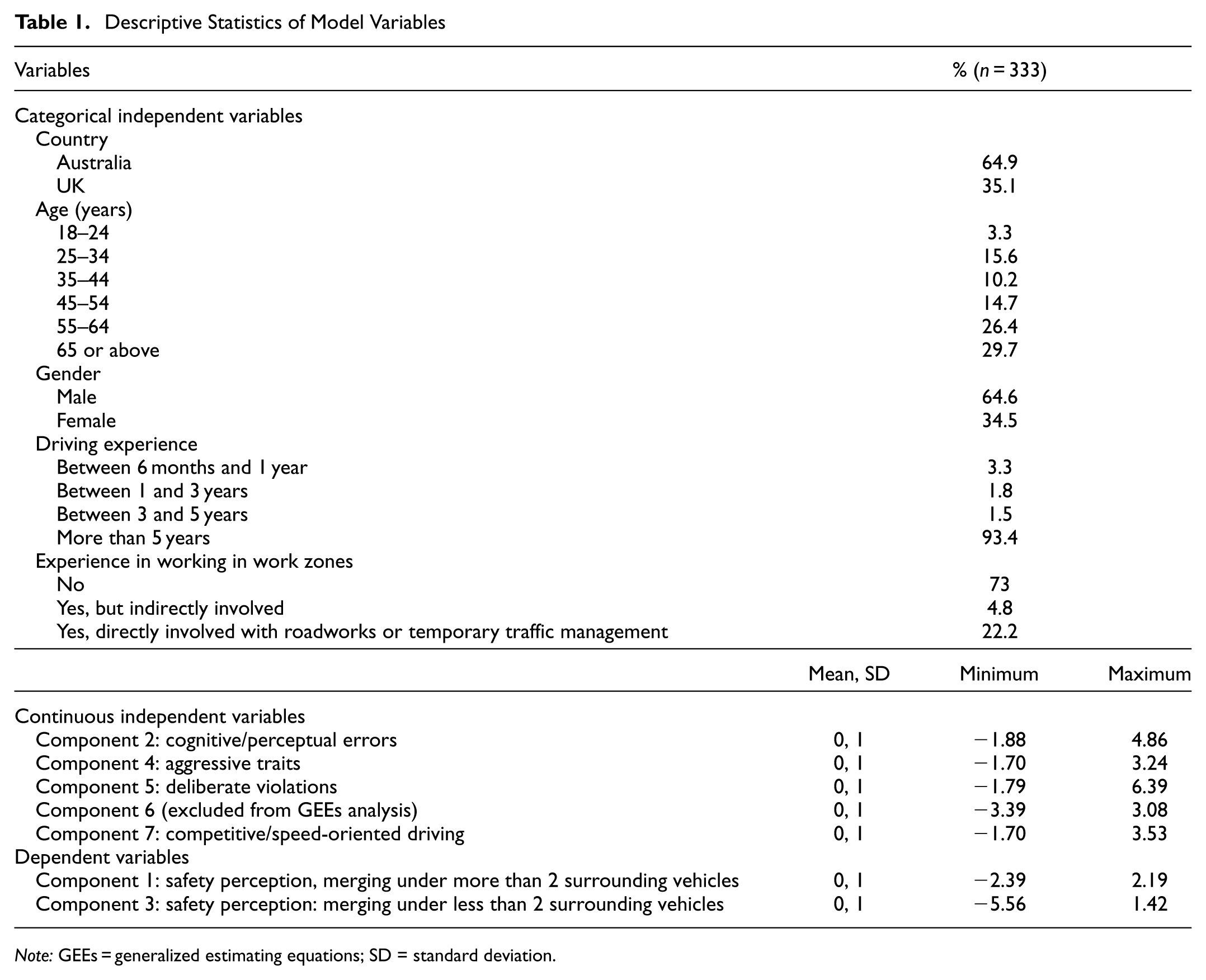
Note: GEEs = generalized estimating equations; SD = standard deviation.
About 56% of participants in this study were aged 55 years or above, which compares well with the combined proportion of 50.2% in the UK and 47.2% in Australia across the same age bands. The age groups between 25 and 54 years were well represented, collectively accounting for 45.5% of the sample, compared to approximately 47.1% in the UK and 47.6% in Australia. The sample broadly reflects the age composition of licensed driving populations in both countries, supporting the validity of the findings.
The two models were compared based on the goodness of fit of each model, based on the QIC. To account for potential errors in the assumption of the working correlation structure, SPSS applies a robust covariance estimator (also known as the Huber-White Sandwich Estimator), which provides consistent standard errors. This ensures reliable inference even in the presence of within-subject correlation. The significance of all predictors was assessed using a 95% confidence interval, and the model included variables that were statistically significant. The root mean square error (RMSE) was calculated using predicted values to evaluate the accuracy of the two models.
Results
Component Structure of Driver Behavior and Safety Perceptions
The PCA was conducted on 20 Likert scale driver behavior questions and 16 Likert scale safety perceptions, which differ by type and presence of surrounding vehicles during a merging maneuver, to uncover latent behavioral dimensions underlying drivers’ self-reported responses in work zone merging scenarios. The KMO measure yielded a value of 0.9, and Bartlett’s test of sphericity was significant (p < 0.001), indicating that the data set was appropriate for factor analysis. Six components with eigenvalues greater than one were retained, together explaining approximately 60% of the total variance.
The rotated component matrix revealed distinct factor structures. Component 1 (FAC1_1) captured safety perception during lane merging where there are more than two vehicles in the surrounding vehicle positions. Component 3 (FAC3_1) represented safety perception during lane merging when there were two or fewer vehicles in the surrounding vehicle positions. Other components captured characteristics such as cognitive and perceptual errors (FAC2_1), expressive aggression (FAC4_1), deliberate violations and risk-taking (FAC5_1), and competitive/speed-oriented driving (FAC7_1).
Factor loadings above 0.50 were considered significant and used to interpret the component meanings. Component scores were generated using Oblimin with Kaiser Normalization. If the factor loading of a particular component exceeds |0.4|, it was decided that the question falls under that component. Table 2 presents the components obtained from the PCA. It describes the types of questions retained under each component, along with a description of how they were treated in the model.
Pattern Matrix of the Principal Component Analysis
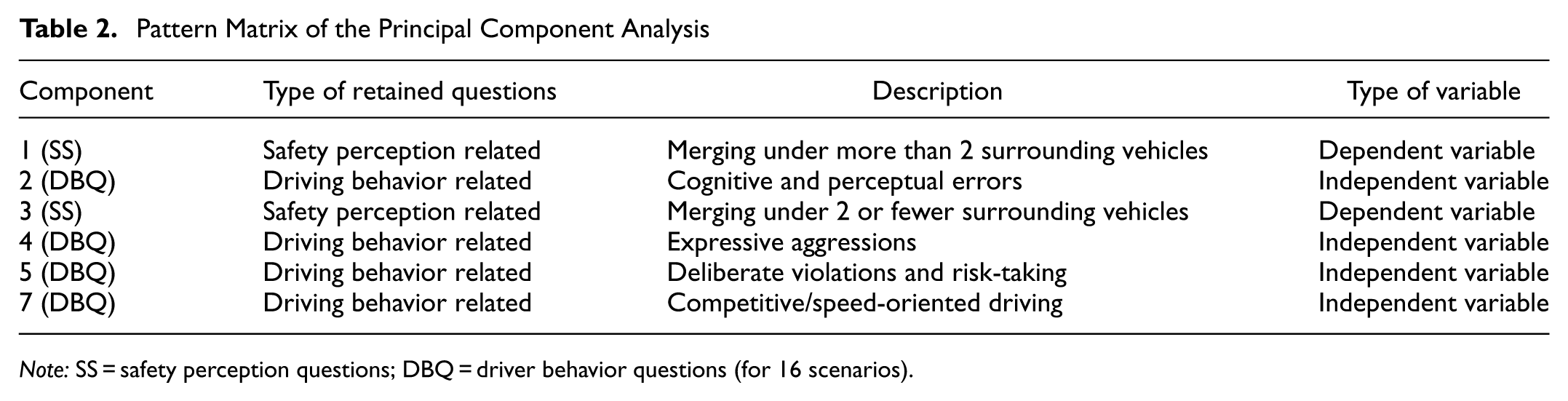
Note: SS = safety perception questions; DBQ = driver behavior questions (for 16 scenarios).
Factor loadings for Components 1 and 3 suggested retaining the questions related to SS, which will be used as dependent variables in the next stage. Factor loadings for Components 2, 4, 5, and 7 suggest retaining the questions related to DBQ, which will be used as independent variables in the next stage, along with demographic variables. Given that Factor 6 does not contain comparatively higher factor loadings than other components under each question, it was decided not to consider Factor 6 as a variable in the analysis at the next stage. Table 2 summarizes the components, their related questions, and how they are used in the analysis in the next stage.
GEE-based Regression Outcomes
Two GEE models were developed, with components related to safety perception when merging under more than two vehicles and when merging under two or fewer than two vehicles as the dependent variables. Each model included demographic variables (age, gender, and country), driving experience, experience working in work zones, and scores from the PCA components related to the driving behavior.
Estimation results of the two models are presented in Table 3. Model 1, representing high vehicle density scenarios, achieved an RMSE of 0.93, while Model 2, representing low vehicle density scenarios, recorded an RMSE of 0.97. These results suggest that the models captured the underlying patterns in drivers’ safety perceptions with satisfactory accuracy.
Results of GEE
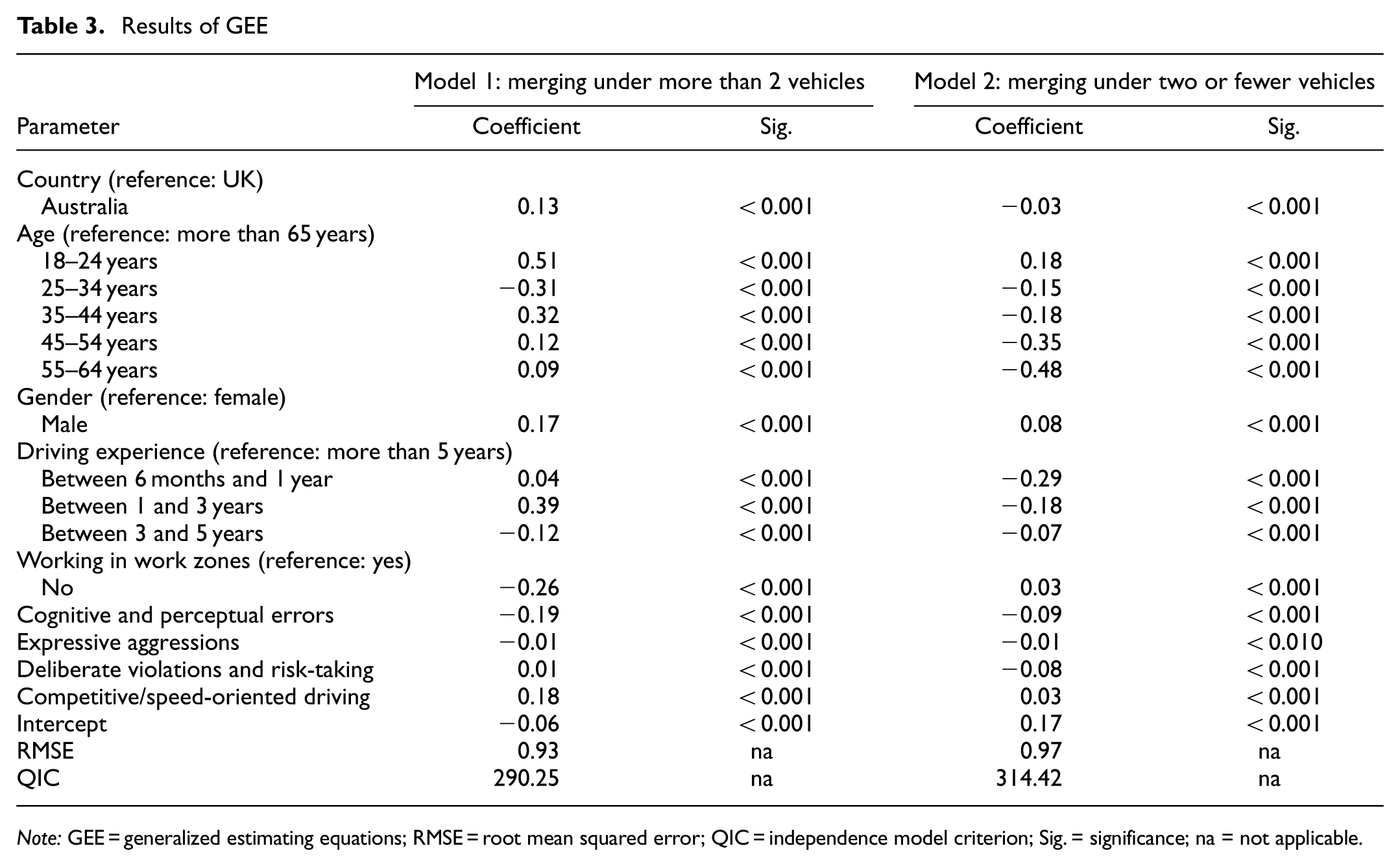
Note: GEE = generalized estimating equations; RMSE = root mean squared error; QIC = independence model criterion; Sig. = significance; na = not applicable.
Several similarities were observed across both models when examining the influence of demographic and behavioral factors on safety perceptions during work zone merging. Model 1, representing higher surrounding vehicle density, and Model 2, representing lower surrounding vehicle density, both showed that drivers aged 18–24 years exhibited slightly higher positive coefficients, suggesting greater perceived safety among younger drivers. In contrast, drivers aged 25–34 years consistently exhibited negative coefficients, indicating lower perceived safety. Other age categories significantly influenced safety perception in Model 1 positively, while exhibiting inverse relationships in Model 2, highlighting the varying sensitivity of different age groups to traffic density during merging.
Gender showed an inverse relationship with safety perception in both models, as indicated by consistently negative coefficients, suggesting systematic differences across genders in risk assessment during merging maneuvers.
Driving experience emerged as a critical factor. Under low surrounding vehicle density, all categories of driving experience had significant inverse effects on safety perception, indicating that less experienced drivers tend to perceive merging as less safe even under less complex traffic conditions. In contrast, the other model indicated that while having less than
1 year of experience only slightly influenced safety perception; drivers with 1–3 years of experience demonstrated a positive association, whereas those with 3–5 years showed an inverse relationship. These trends suggest that moderate experience levels may enhance perceived safety under complex merging conditions, while intermediate experience can increase caution.
Work zone experience also played a role. Drivers without prior work zone experience had a significant negative association with safety perception under high surrounding vehicle density, suggesting that unfamiliarity with temporary traffic controls worsens perceived risk in dense traffic. However, in Model 2, work zone experience showed only a slight effect.
Apart from demographic variables, particular attention was paid to understanding how different driving behavior patterns influence safety perception during work zone merging. Drivers who exhibited tendencies toward cognitive and perceptual errors consistently showed a negative relationship with safety perception in both high and low vehicle density conditions. This outcome suggests that drivers who are more prone to misjudgments, lapses in attention, or misinterpretations of traffic situations tend to perceive merging maneuvers as less safe, regardless of surrounding vehicle complexity.
Competitive and speed-oriented driving behaviors affect safety perception significantly, but their effect varies depending on the surrounding traffic density. Under higher surrounding vehicle density conditions, drivers exhibiting these traits were more likely to perceive merging situations as safer. This trend may indicate a form of self-assessed driving competence in which drivers who are confident in high-speed or competitive traffic situations feel more capable of navigating complex merging scenarios. However, when the surrounding vehicle density was lower, this behavior did not significantly influence safety perception, suggesting that competitive drivers may activate risk-normalizing behaviors only when the merging environment is perceived as challenging.
However, behaviors associated with deliberate violations and expressions of anger while driving were not found to significantly influence safety perception under either traffic density condition. The lack of association suggests that while these behaviors may reflect broader attitudes toward traffic norms or emotional control, they do not strongly modulate a driver’s subjective assessment of safety during merging at work zones. Therefore, traits directly tied to attention, judgment, and situational confidence play a larger role in shaping safety perceptions during lane merging than general rule violations or emotional responses.
Collectively, the findings highlight that individual behavioral profiles significantly interact with environmental complexity in shaping drivers’ perceived safety during work zone merging events. Drivers’ internal cognitive processes and competitive traits are critical factors to consider when assessing subjective safety perceptions in dynamically changing road environments.
Discussion
The findings highlight the multidimensional nature of safety perceptions in work zones and offer valuable insights into how driving behavior, demographics, and experience intersect to shape safety-relevant attitudes and decisions.
The PCA results confirmed that a single trait or scale cannot adequately capture behavior in work zones. This might be because of the complexity of driver behavior. A random driver can commit errors and violations, which include slips, lapses, mistakes, unintended violations, and deliberate violations ( 11 ). The emergence of seven distinct behavioral components affirms the complexity of driver psychology and supports the use of multidimensional behavioral assessments. Of note, the components identified align with well-established behavioral constructs, such as errors and violations, which are frequently discussed in driving behavior literature. Furthermore, components related to the driver behavior identified in this study align with the findings of the literature ( 13 ).
Factor loadings to cluster safety perception related questions and driver behavior questions separately make a perfect conceptual foundation. This result indicates that DBQ items measure one underlying construct (driver behavior tendencies), while SS items measure a distinct construct (e.g., perceived safety in specific work-zone merging contexts). This might be mainly because of the underlying differences between safety perception and driving behavior ( 17 ). Although PCA is a purely statistical technique and does not “know” the content of the questions, it correctly separated these based on how people responded, suggesting low cross-loading between the two item sets.
These results can be considered a theoretical justification that work zone safety perception is not merely a reflection of general driving behavior but a separate and valid construct.
Drivers who demonstrated higher levels of cognitive and perceptual errors consistently rated merging situations as less safe, especially when surrounded by more than two vehicles. Drivers with these traits were 19% and 9% more unlikely to perceive situations to be unsafe with more than two surrounding vehicles and less than two surrounding vehicles, respectively. This may be because these drivers are more likely to experience difficulty in processing complex traffic environments, leading to heightened stress or uncertainty during high-density merging situations ( 23 ). Similarly, those with competitive or speed-oriented tendencies are more likely to perceive a situation as safe when in high-traffic merging scenarios. The finding that competitive or speed-oriented drivers reported higher safety perceptions in dense merging environments suggests that these individuals may experience a degree of overconfidence when navigating complex traffic. This aligns with the risk-taking literature, which shows that people with strong sensation-seeking traits have increased motivation and capability to engage in risky behaviors ( 24 , 25 ). An alternative explanation is adaptive skill development (i.e., drivers who habitually engage in fast or competitive driving may have greater familiarity with high-density environments), which may lead to a sense of control that reinforces higher perceived safety. This finding supports that their driving style can primarily influence a driver’s crash risk assessment ( 26 ).
Expressive aggression had minimal influence on safety perception in both traffic density scenarios, with only 1% safety perception reduction in each, implying that emotional expressions while driving may not significantly affect how drivers assess safety during merging. Similarly, deliberate violations and risk-taking behaviors did not show strong associations with safety perception, suggesting that these drivers maintain a consistent internal safety threshold regardless of traffic context.
The contrast in parameter values between high- and low-traffic scenarios highlights the interaction between driving style and situational complexity. Drivers adjust their perception of safety based on how well the situation suits their behavioral tendencies. These findings emphasize that individual behavioral traits significantly shape how safety is internally assessed in dynamic merging environments. The findings further support the idea that drivers behave differently, despite being exposed to the same driving environments ( 27 ).
Older age was consistently associated with more cautious behavior. The main reason behind this finding can be age-related cognitive and risk perception changes, which foster defensive driving patterns, and elder drivers adopt more cautious behavior than the younger drivers ( 26 ). In contrast, younger drivers showed a stronger tendency to perceive situations as safe even when surrounded by multiple vehicles, with a marginal effect of 0.51, suggesting an underestimation of actual risk. These misjudgments can lead to premature or aggressive merging decisions, potentially increasing the likelihood of conflicts or collisions. These results highlight the importance of accounting for individual-level traits when assessing how drivers interpret and react to dynamic merging scenarios.
This finding echoes established research linking youth to increased crash risk and sensation-seeking traits among young drivers ( 28 ). This behavioral divergence underscores the importance of tailoring safety interventions to different age groups, particularly in complex work-zone scenarios. The lower safety ratings observed among older participants may reflect personality, functional performance, and travel patterns related to older drivers ( 29 ). In addition, incorporating driver age into predictive safety models may enhance the accuracy of risk assessments in dynamic traffic environments.
These gender and age-based differences in safety perception may stem from variations in how merging complexity is processed. The model in this study quantifies this difference more precisely; the marginal effect for males increases the probability of reporting situations to be safer by approximately 17% under dense surrounding vehicle conditions. The divergence in perception could also reflect underlying differences in driving strategies, where female drivers prioritize space and time margins more strictly. Gender differences observed in this study also reflect patterns widely documented in the literature. Male drivers consistently rated dense or challenging merging scenarios as safer, supporting that female road users feel more unsafe than male road users, especially in challenging situations ( 30 ). Together, these behavioral tendencies help contextualize the results and highlight the importance of accounting for overconfidence and demographic risk-propensity when designing work zone safety interventions. The age distribution of this study sample further aligns with that of the general populations of the UK and Australia, particularly in middle and older age groups ( 31 , 32 ).
Of interest, previous driving experience emerged as a critical factor. Respondents who had 3–5 years of driving experience were more likely not to perceive situations as safe, with a percentage reduction of 12% and 7% in safety perception with more than two surrounding vehicles and less than two surrounding vehicles, compared with drivers who had more than 5 years of driving experience. This supports the idea that firsthand exposure to danger can recalibrate risk assessment and induce more conservative driving habits.
The findings of this study provide several practical actions to improve safety management in work zones. Because drivers with higher cognitive-error tendencies reported lower safety perceptions when surrounded by multiple vehicles, work zone layouts should be designed to minimize visual and cognitive load, such as clearer signage, simplified taper transitions, and improved sight distance to support these vulnerable driver groups. The result that competitive/speed-oriented drivers feel safer in dense traffic indicates the need for targeted behavioral interventions, including messaging that highlights the risks of overconfidence and aggressive merging in constrained environments. The strong demographic effects observed, particularly that younger and male drivers perceive higher safety even in potentially risky conditions, suggest that safety campaigns should provide explicit guidance on safe merging distances and speed control, tailored toward these groups who may underestimate danger. Heavy vehicle operators, who significantly influence surrounding drivers’ safety perception, should receive dedicated guidance on maintaining predictable speed and lane-changing behavior in work zones to reduce uncertainty for following vehicles. From a policy perspective, transportation agencies should integrate behavioral traits and demographic patterns into work zone risk assessments by routinely incorporating driver-profile data into safety audits and scenario testing. This will ensure that work zone designs, signage placement, and speed management strategies are aligned with actual driver behavior patterns identified in this study, directly improving safety and operational consistency.
This study has some limitations. First, the analysis relied on self-reported perceptions obtained via a questionnaire survey. These methods are widely used to capture subjective safety perceptions in a controlled manner. Second, while scenario-based images may not fully depict real-life driving conditions, they allow for systematic comparison of identical situations under safe and ethical conditions. Third, although the survey sample contained a slightly higher proportion of older drivers, the age and gender profiles were consistent with the national distributions of licensed drivers in both countries. Finally, the findings are specific to Australian and UK contexts; future studies could expand to other regions to explore cross-cultural variations in perceived merging safety.
In summary, these findings present a nuanced view of driver behavior in work zones, combining psychometric structure with behavioral tendencies. The results suggest that interventions aiming to reduce crash risk should consider both behavioral tendencies and contextual factors such as age, vehicle type, and previous crash involvement. Future work should build on these findings by validating them in simulated and real-world merging scenarios and exploring the stability of these components across cultures and roadway types.
Conclusions
This study examined how driver behavior and demographic factors influence safety perception during merging maneuvers in work zones. The PCA identified key behavioral traits, which were incorporated into GEEs to assess their association with perceived safety. The results indicated that drivers prone to cognitive and perceptual errors reported significantly lower safety perceptions in dense merging environments but felt safer when fewer surrounding vehicles were present. In contrast, aggressive and violation-prone traits had weaker associations with perceived safety, suggesting that cognitive processing demands, rather than intentional risk-taking, primarily shape drivers’ comfort in complex situations.
Male and younger drivers perceived higher safety in potentially risky conditions, consistent with the literature linking these groups to higher confidence and lower risk sensitivity. These findings align with Reason’s Human Error Theory and Risk Homeostasis Theory, reinforcing that safety perception reflects cognitive limitations and adaptive risk tolerance. The results highlight the need to incorporate behavioral and demographic diversity into work zone safety design, driver education, and policy development.
This research relied on self-reported perceptions from UK and Australian drivers, and may have limited generalizability, the insights provide a robust foundation for future simulator-based or naturalistic studies. Overall, this study advances a data-driven understanding of how behavioral traits and driver demographics interact with environmental complexity, informing more targeted and human-centered approaches to work zone safety.
Footnotes
Acknowledgements
The authors thank the Traffic Management Association of Australia and the Australasian College of Road Safety for promoting the survey. The authors also thank the drivers who participated in the survey.
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: T. Ranawaka, A. Debnath; data collection: T. Ranawaka; analysis and interpretation of results: T. Ranawaka, A. Debnath; draft manuscript preparation: T. Ranawaka, A. Debnath, C. Bastien, H. Davies. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: Professor Debnath is an Associate Editor of the Transportation Research Record: Journal of the Transportation Research Board. All other authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Deakin University Postgraduate Research Scholarship.
Data Accessibility Statement
The authors do not have permission to share data.