
Abstract
The long-distance evacuation of electric vehicles (EVs) presents significant challenges for disaster management owing to their limited driving range and constrained charging infrastructure. EVs with long charging times can create negative externalities for all other EVs waiting in queues, especially during evacuation scenarios. This study investigates the use of express charging lanes to reduce overall evacuation delays. We propose optimization models to optimize the allocation of charging plugs for express and regular charging, considering both user-equilibrium and system-optimal scenarios. To account for heterogeneities and uncertainties, such as stochastic EV arrival patterns and variable charging demands, we further develop numerical simulation models to quantify the delay distribution. We found that separating EVs with lower charging demand had the potential to minimize total system delay. The proposed models identified the optimal level of express charging plug allocation to minimize the total charging delay without centralized enforcement of traffic distribution. In addition, the models could enable government agencies to estimate the required charging resources to fulfill an evacuation within a given time window. The insights generated by the proposed theoretical models were validated using agent-based simulation, in which uncertainties could be flexibly represented.
Introduction
The increasing trend of transportation electrification has introduced new complexities to emergency evacuation planning ( 1 ). Compared with internal combustion engine vehicles, battery electric vehicles require significantly longer charging times to complete long-distance travel given their limited battery capacity and charging power ( 2 , 3 ). These characteristics can lead to significant congestion at charging stations (CSs), undermining evacuation efficiency and safety. Therefore, an effective emergency charging management strategy for electric vehicle (EV) users is needed to ensure societal resilience and well-being.
In this paper, we focus on investigating the potential value of adding “express” charging lanes in relation to charging delay. Although the concept of express lanes has already been adopted in various domains, such as supermarket checkouts, highway transportation, airport boarding, banking services, and the healthcare industry, the rules and motivations of express lanes can differ dramatically across domains. For example, highway transportation may adopt express lanes to encourage ride sharing (e.g., high-occupancy vehicles [HOV] lanes [ 4 ]), whereas the healthcare industry implements express lanes (e.g., priority scheduling [ 5 ]) to ensure the timely treatment of high-risk patients. The motivation for adopting express lanes for EV charging is two-fold. First, the timely evacuation of all vehicles is critical, and long-charging EVs can create major bottlenecks. Separating EVs with different charging demands in multiqueues could limit this negative externality to those EVs with lower charging demands. Second, during evacuation scenarios, it would be beneficial to minimize charging demand given the limited charging resources. Although it is impractical for charging operators to enforce a maximum charging demand, adopting express lanes would encourage EV drivers to only charge the energy amount needed for their evacuation.
There has been a noticeable amount of literature on EV evacuation. Babaei and Wong analyzed the main challenges in the use of EVs during disaster scenarios and identified that a lack of charging infrastructure is one of the most significant ongoing issues ( 6 ). Several studies have focused on the planning of charging infrastructure to improve resilience in extreme events. For example, Zhang et al. proposed a multiobjective optimization model to plan flood-resilient CSs to maximize charging convenience while minimizing the impacts of flood hazards ( 7 ). Tang et al. optimized the placement of mobile CSs in addition to departure and charging scheduling to support EV evacuation ( 8 ). Lu proposed a two-stage stochastic program to optimize EV charging infrastructure allocation considering uncertain evacuation times and hurricane severity ( 9 ). Although addressing questions such as optimal station locations, network coverage, and capacity expansion, these studies do not examine the operational strategies of CSs, particularly under high-stress scenarios like emergency evacuations.
From an evacuation planning perspective, given the limited charging infrastructure, Li et al. studied when to evacuate and which route and CSs an EV should use to efficiently evacuate ( 10 ). They assigned CSs proportionally to meet charging demand. Purba et al. solved an evacuation route planning problem using a branch-and-price matheuristic algorithm based on column generation ( 11 ). MacDonald et al. used queueing models and microscopic traffic simulation to evaluate the impacts of EVs during mass evacuations ( 12 ). Instead of relying on passenger EVs for evacuation, Zhang and Zhang investigated the potential efficiencies, equity, and economic advantages of coordinated electric buses ( 13 ). However, the strategic operation of CSs (such as incorporating express lanes) to optimize the charging delay was not considered in the aforementioned literature.
For EV charging during normal scenarios, researchers have actively investigated novel management strategies to reduce waiting times. For example, Tian et al. ( 14 ) and Ammous et al. ( 15 ) strategically directed EV fleets to CSs to minimize the waiting time, charging costs, or both. However, these studies required centralized control and full information of EV travel trajectories, which is not realistic for passenger EVs. We identified only a few studies on traffic distribution to CSs, considering user equilibrium (UE) instead of system-optimal (SO) assignment. For example, some studies have used pricing mechanisms to optimize social welfare (including waiting time) and/or profits without enforcing EV drivers’ decisions ( 16 ). However, pricing mechanisms are not suitable during emergencies since they can create significant social justice issues (e.g., populations with higher incomes being assigned higher priority to charge and evacuate). Other studies have explored priority-based models to schedule charging times. For example, Xu et al. proposed a “less laxity and longer remaining processing time” principle to minimize the total costs to charge a fleet of EVs ( 17 ). However, this setting is not applicable in evacuation scenarios as EVs are trying to evacuate as soon as possible and should not provide charging laxity voluntarily. In addition, literature on the daily operation of CSs typically considers balanced supply and demand scenarios, which are not applicable when a surge of evacuation traffic is likely to overload the CS service capacity for an extended period of time.
In the priority-queue literature, separating “fast” from “slow” customers has been explored in several service settings that are analogous to the trade-offs faced with express charging. From a theoretical standpoint, dedicating one server to short jobs and another to long jobs has been shown to reduce delay under certain conditions ( 18 ). Empirical studies in retail support this finding. An item-count threshold for express checkouts can reduce average wait time when demand variability and load are high ( 19 , 20 ). Priority lanes have also been studied on highways. Menendez and Daganzo showed that a reserved HOV lane can smooth bottleneck flow and raise overall throughput if utilization and merge friction are managed ( 4 ). A recent fast-charging study by Kakillioglu et al. extended the idea to EV infrastructure ( 21 ). It developed a feedback-control scheme for everyday station operations, which reserves “express” chargers for drivers seeking a quick top-up (or paying a premium) to maintain a preset delay advantage, while the standard queue remains stable. However, Kakillioglu et al. did not study the impacts of express lanes on the total waiting delay nor on the non-pricing-based resource allocation strategies to achieve total delay minimization.
In general queueing literature, multiclass and priority queueing systems have been extensively studied. For example, Rothkopf and Rech conceptually discussed key trade-offs between multiqueue and combined queue systems and concluded that combined queues may not always be preferred ( 22 ). One of the cited advantages of a multiqueue system is that it allows segregation of jobs by service time (i.e., express lanes), which can help reduce service time variability. Empirical studies have also tried to quantify the impacts of express lanes in different domains. Sleptchenko et al. proposed an exact solution approach for the state probabilities of a multiclass queue with preemptive priorities ( 23 ). Heterogeneous queueing lanes were not considered. Kwak investigated the effect of express checkouts in retail stores through simulation and found that when the arrival rate is high and the regular service time is long, the average queue length can be reduced by having express checkout lanes ( 19 ). Kalló and Koltai proposed both analytical (i.e., M/G/1 and M/G/k) and simulation approaches to understand the optimal limit to qualify for the express lines ( 20 ). Henprasert et al. proposed a tandem queueing model to model the shopping and checkout process at retail stores with express lanes ( 24 ). A simulation platform was proposed to evaluate the performance. However, these results do not easily generalize to EV evacuation owing to the unique assumptions of retail store settings.
Whereas multiclass and priority queueing systems have been extensively studied, the application of express lanes to EV evacuation scenarios—particularly under surge conditions with oversaturated flow rates—remains limited. Moreover, the notions of UE and SO have never been discussed in priority-queue literature. To the best of the authors’ knowledge, this is the first attempt to adopt the concept of priority queues to CS operations to support EV evacuation considering both SO and UE flow distributions. We propose a new modeling framework to capture the heterogeneity in charging demand, charging locations, and charging lane types, as well as using rigorous mathematical modeling and derivations to study the potential impacts of express lanes on evacuation delay under both UE and SO traffic patterns. Therefore, the main contribution of our work is to investigate the impacts of express lanes for EV evacuation, considering UE/SO traffic distribution, heterogeneous energy needs, charging resource allocation, and express-lane qualification threshold.
The remainder of this paper is organized as follows: Section 2 summarizes the problem settings and specific research questions. Section 3 presents the methodologies for both SO and UE. Section 4 discusses the results to generate insights, and Section 5 concludes the paper with a summary and suggestions for future extensions to the research.
Problem Statement
In this paper, we consider a set of CSs,
To enhance system-level evacuation efficiency, each CS has the option to dedicate a portion of charging plugs to EVs with a charging demand less than a certain threshold,
Figure 1 illustrates a toy evacuation corridor. EVs depart the origin, traverse the corridor, and arrive at the destination. Each station, CS1 to CS3, offers a “regular” (R) queue (blue plugs) and an “express” (E) queue (orange, dashed-line plugs). Purple cars represent high-SOC (i.e., low energy demand) EVs and yellow cars represent low-SOC (high energy demand) EVs. We can see that low-SOC EVs are not eligible for express lanes and can only queue at the regular lanes in this example (Figure 1). In addition, CS3 is considered infeasible for low-SOC EVs because their initial energy is not sufficient for them to reach that particular CS, thus, CS3 can only serve high-SOC EVs.

Schematic of the evacuation corridor showing origin, destination, charging stations (CS1 to CS3) with regular (R) and express (E) plugs, and representative high- and low-SOC EVs.
In this paper, we aim to answer the following research questions:
Will express lanes reduce the total delay at CSs?
How much service capacity should be allocated to express lanes?
How much greater is the total charging delay under UE traffic distribution compared with the SO solution when express lanes are implemented?
How many plugs are sufficient to ensure a timely evacuation within a desired time window?
What is the optimal SOC cutoff threshold to qualify for using express lanes?
Methodology
In this section, we first model the express lanes in deterministic scenarios, where the arrival and charging demands are deterministic (i.e., D). We assume that EV drivers know (or can predict) the expected waiting time when they make their charging decision and will optimally select the most efficient CSs/lanes for them. As a result, theoretical queueing models based on D/D/k are adopted for modeling both the regular and express lanes, where
Deterministic Queueing Models
In this section, we formulate the queueing models with deterministic arrival patterns and charging demands for SO and UE scenarios. The key notation is summarized in Table 1.
Glossary of Main Symbols

Note: EV = electric vehicle; CS = charging station; SOC = state of charge.
System Optima
In an SO scenario, charging operators dictate the distribution of traffic flow to each CS and each lane type, in addition to the percentage of charging plugs being used for express lanes, to optimize the evacuation efficiency. The objective is to minimize the total waiting time, which is formulated as Equation 1.

In relation to constraints, first, we needed to ensure evacuation traffic-flow conservation for each type of EV, as shown in Constraint 2.

Second, the percentage of charging plugs allocated to each lane type should total 1 (Equation 3). It was not possible to allocate no charging resource to either type of lane, otherwise the problem would degenerate into a uniform CS operation problem. Therefore, we added Constraint 4 to ensure that lane type


Third, we needed to formulate the relationship between the waiting time and our decision variables,

The departure rates depend on whether any EVs that have the priority to be charged at CS

The saturated departure rate,

Note that the system cannot be optimal when queues at the regular lanes have dispersed at some point while the express lanes at the same CS still have queues. This is because high-type EVs can freely switch to regular lanes to save total waiting time. In addition, since we considered evacuation scenarios comprising a surge of evacuation traffic, the regular lanes,
By substituting


We assume that once lane

where

The total delay at lane

The total delay at lane

Last but not least, we can impose restrictions on certain lane types,

The SO optimization problem is summarized in Model 15:


User Equilibria
Centrally coordinating the flow distribution of all EVs is neither scalable nor practical given the decentralized nature of evacuation behavior. Next, we consider that EV drivers can select any CSs and lanes that are eligible and feasible to minimize their waiting time. Since we assume that high-type EVs can access both types of lane whereas low-type EVs can only access regular lanes, the equilibrium conditions need to be specified for different EV types based on their feasible CSs and eligible lanes. Mathematically, we can express the equilibrium conditions as complementarity conditions (Equation 16).

where
Since the current arrival and departure rates are time invariant for

Since the arrival and departure flow rates from CS
Based on Equations 16 and 17, the UE condition can be written as Equation 18, which is independent of time



Simulation-Based Stochastic Queueing Models
In the section covering deterministic queueing models, we derived theoretical models for both system optima and user equilibria, assuming deterministic EV arrival and charging patterns. To further investigate the impact of randomness on the CS management strategies and charging delay, we consider random EV departure patterns from the origin and random charging energy demand in this section. Although rigorous mathematical modeling of UE in a stochastic environment is challenging, the impacts of randomness can be easily quantified by agent-based simulation. We adopted Python/SimPy as our simulation platform. The resource is charging plugs, whereas the requests made by EVs are based on their preference (i.e., shorter waiting time) and eligibility. We assume that EVs depart from the origin, follow a Poisson process with an expected flow rate,
The simulation flowchart is summarized in Figure 2. At the top level, an outer loop iterates across SOC-eligibility thresholds,
Environment setup: Instantiate each CS, allocate express and regular plug resources according to the power split, and reset all performance metrics.
Arrival generation: Schedule EV departures from the origin as a Poisson process of expected rate,
Energy sampling: For each EV, sample an initial SOC and compute its minimum required charging energy from the specified distribution on
Eligibility and routing: Each EV whose required energy is equal to or less than threshold,
Service and logging: Each EV waits for its turn, seizes a plug, charges for the duration
Replication summary: Once the final EV has departs, compute and store performance metrics (mean delay, throughput) for that replication.
After all

Workflow of the EV charging simulation.
Results
Toy Examples
In the base case, an evacuation route with 100 DC fast-charging plugs of 60 kW charging power was considered. Without loss of generality, all charging plugs were assumed to be feasible for finishing the evacuation trips for both types of EV; otherwise, they were excluded from the analysis. The total flow rates of low- and high-type EVs were 100 and 500 vph, respectively, for an evacuation time window of
First, the total charging delay was compared between the UE and SO scenarios. We considered different percentages of charging plug allocation to the regular and express lanes, where
When the percentage of charging power allocated to regular lanes was small (i.e.,
When
When
Figure 3 also provides insights on the optimal operation of CSs. For example, to minimize the total delay,
Second, the impact of the number of charging plugs on queue dissipation time was investigated. A key question for emergency management is how much charging resource will be sufficient to ensure the full evacuation of all EVs by a given time. To answer this question, we investigated the relationship between the number of plugs and the minimum time needed to dissipate all the queues in UE, given the optimal charging plug allocation. The results are shown in Figure 5: the 24-h horizon is to illustrate how many charging plugs are required to fully clear the queues within 24 h considering an 8-h arrival surge. In this example, it can be seen that approximately 45 charging plugs were required to clear all queues within 24 h. Whereas the arrival demand was generated over an 8-h evacuation window, charging service continued beyond the 8 h until all queues had cleared. Furthermore, from Figure 5 we can see that the marginal benefits of reducing queue dissipation time decreased with an increase in the number of plugs. Such information could be utilized to justify a reasonable level of charging plug investment to ensure that the marginal benefits of an additional unit of charging plugs can outperform the additional costs incurred.

Comparing the minimum waiting times between user equilibrium and system optimal.

Comparing the high-type electric vehicle (EV) flow distribution in user equilibrium (UE) and system optimal (SO).

Impact of the number of plugs on queue dissipation time.
Third, the impacts of stochastic arrival on total waiting time were evaluated. Although it is widely acknowledged that random arrivals will increase the total delay, the extent to which randomness will affect the existence of express lanes remains unexplored. We considered two scenarios. The first scenario comprised 16% of the plugs being allocated to regular lanes, and the second scenario investigated 100% of the plugs being dedicated to regular lanes (i.e., no express lane). We considered the arrival pattern to follow a Poisson distribution with the expected arrival rates identical to the base case. We repeated the simulation 100 times in Python/SimPy to quantify the probability distribution of total charging delay. The results are shown in Figure 6. For both scenarios, total delay in the deterministic case was within the 25th- and 50th percentiles when the arrival rate followed a Poisson distribution. This was as expected because arrival randomness will lead to temporary overloads and queue buildup even if the average arrival rate equals the average service rate. When there were express lanes, the difference between the deterministic average waiting time and the median waiting time was larger compared with the case without express lanes. This is because without express lanes, all EVs will have to queue in one lane. Since the charging time is lengthy, the queue will build up quickly and persist; therefore, random arrivals will not cause a major difference to the average waiting time. On the other hand, with express lanes, the variance in charging time can be reduced because only EVs with lower charging demand will use the express lanes. The express lanes have a faster service rate, which results in a more balanced arrival and departure pattern. When arrivals are uncertain, there is a higher likelihood of the queue building up, which leads to a higher average waiting time. This should be taken into account, especially when designing a CS with express lanes.

Impact of arrival uncertainties on average delay.
Fourth, we investigated the impacts of the eligibility threshold for express lanes on the total charging delay, considering the stochasticity and heterogeneity of EV energy demand and the arrival process. We assumed a Poisson distribution of EV arrivals with an average arrival rate equal to 600 EVs per hour. We assumed four probability distributions for energy demand, a truncated normal distribution (mean: 50 kWh, SD: 10 kWh), a truncated lognormal distribution (mean: 50 kWh, SD: 10 kWh), a uniform distribution between 20 and 80 kWh, and a bimodal distribution (mean: 30 kWh and 70 kWh, SD: 10 kWh). These four probability distributions were chosen to demonstrate the impact of the shape and variance of charging demand on charging delay. We considered a total of 300 charging plugs, 50% of which were prioritized for EVs with charging demand less than threshold
When the threshold,
The optimal charging demand threshold for all distributions was around 40 to 50 kWh. This was slightly less than the mean value of the charging demand, which was 50 kWh. If the threshold,
When comparing different distributions, we observed that the impact of an optimally selected threshold,

Impact of express-lane threshold on average waiting time: (a) normal distribution, (b) lognormal distribution, (c) uniform distribution, and (d) bimodal distribution.
Real-World Case Study
Although mass evacuations dominated by EV charging have not yet occurred (since the current EV adoption rate is still low), recent disaster events have clearly demonstrated the real-world infrastructural bottlenecks under evacuation or grid-stress conditions (e.g., 2017 Hurricane Irma [ 26 , 27 ] and 2021 Texas Winter Storm [ 28 , 29 ]). To demonstrate the applicability of the proposed express charging lane framework, we developed a real-world case study focused on long-distance EV evacuation from the city of Houston, TX. Houston has a history of large-scale evacuations from hurricanes. For instance, Hurricane Rita in 2005 prompted about 2.5 million evacuations from Southeastern Texas, leading to severe traffic congestion, fuel shortages, and over 100 evacuation-related deaths ( 30 ). Hurricane Ike in 2008 saw over 1 million coastal evacuations owing to different risk perceptions ( 31 ). We examined evacuation along two major corridors: I-45 (Houston to Dallas) and I-10 (Houston to San Antonio), both critical for outbound mobility during hurricane emergencies. A schematic overview of the modeled network, including origin–destination cities and charging infrastructure configurations, is shown in Figure 8.

Electric vehicle (EV) evacuation corridors between Houston and Dallas (via I-45), and between Houston and San Antonio (via I-10).
We identified the total number of DC fast CSs with a rated output ≥50 kW located on each corridor. The I-45 corridor hosts 132 plugs, whereas I-10 has 87 plugs (
32
,
33
). The weighted average plug power was calculated as 272.4 kW on I-45 and 289.1 kW on I-10. For simulation, we assumed a mandatory evacuation order over an 8-h window (
Table 2 summarizes the SO solutions of delay, EV volume, and travel time across both corridors under the two lane configurations. The results highlighted how the presence or absence of express lanes influenced delay patterns across both corridors. In the regular-lanes-only scenario, all vehicles used the same charging lanes regardless of their energy needs. This led to high congestion, particularly on the I-45 corridor, where over 232,000 vehicle-hours of charging delay occurred. Much of this charging delay was caused by high-demand EVs that required longer charging times and consequently slowed down throughput for others. I-10 also experienced substantial congestion, with over 92,000 vehicle-hours of charging delay. In total, the system saw 454,089 vehicle-hours of delay (including travel time and charging delay), and the average time each EV spent in the system was 11.30 h.
Comparison of Travel Time, Charging Delay, and Total Delay by Corridor and System Configuration
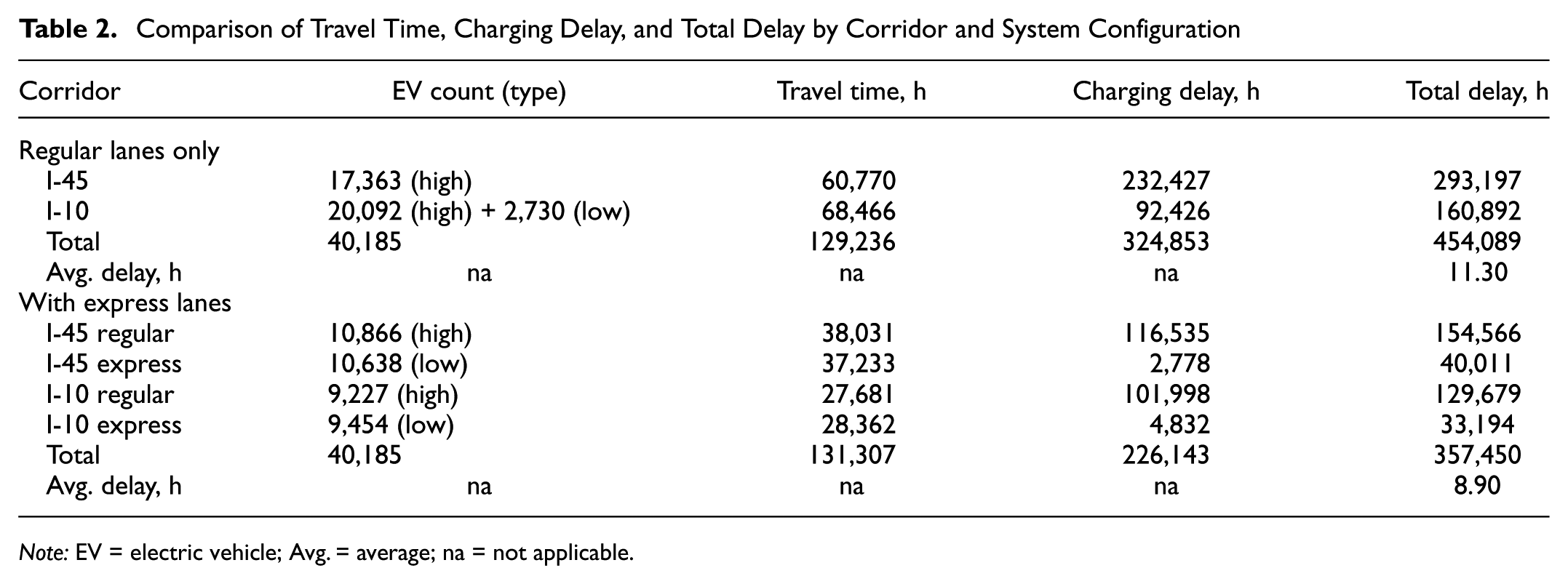
Note: EV = electric vehicle; Avg. = average; na = not applicable.
The introduction of express lanes led to a more efficient evacuation. In this configuration, low-demand EVs were assigned to express lanes with faster turnover, whereas high-demand EVs used regular lanes. This separation helped reduce competition for charging and improved overall efficiency. Total system delay dropped to 357,450 vehicle-hours, and the average time per vehicle decreased to 8.90 h. The improvement was particularly evident on I-45, where there was a sharp reduction in EVs’ total delay. I-45 express lanes alone served over 10,600 EVs with only 2,778 vehicle-hours of delay. A similar effect was seen on I-10. The total travel time across the system was roughly equal in both scenarios, confirming that improvements in average time per EV were driven by reduced charging delay. These findings demonstrated that express-lane configurations can dramatically improve evacuation efficiency by minimizing the charging delay externality caused by high energy demand EVs. This was achieved without adding new chargers, solely through the smarter allocation of existing charging capacity.
Conclusion
In this paper, we have proposed both theoretical models and numerical simulations to better understand the potential impacts of express lanes on EV waiting time during evacuation. We considered both UE and SO traffic-flow patterns in deterministic and stochastic settings. Through an illustrative example, we have presented the reasoning behind the optimal allocation of charging plugs to express lanes, the minimum number of plugs to ensure a timely evacuation, and the impacts of uncertainties and express-lane thresholds on charging delay. We found that,
The optimal charging policy is to allocate sufficient charging resources for high-type EVs to ensure the minimum waiting time for EVs that arrive later in the queues.
The marginal benefits of the number of plugs on queue dissipation time may significantly reduce. A necessary number of plugs can be estimated using the proposed approach, given a desired evacuation time window.
Uncertainties play a more significant role in estimating the impacts on waiting time at express lanes, where the arrival and departure rates are more balanced.
The overall relationship between the express-lane threshold and average waiting time remains similar across different levels of charging demand variance. However, the benefit magnitude of an optimally selected express-lane threshold was higher for the case with higher charging demand variance.
This study could be extended in several research directions. First, we will consider the steady state of evacuation traffic flow over a given evacuation time window. This assumption could be relaxed to better understand potential time-varying evacuation behavior on system charging efficiency. Second, instead of optimizing the express-lane setting given the estimated traffic flow, it would be valuable to deploy an adaptive learning approach to dynamically change the allocation of charging plugs to different types of EV based on real-time queueing lengths and EV charging behaviors. Third, we only considered a single evacuation path. When multiple evacuation paths are available, the operation of CSs is not only going to affect the charging efficiency, but also the routing behavior and travel time. A valuable next step would be to research an integrated modeling framework considering both travel and charging delay. Although this paper focuses on the operational aspect of maximizing charging efficiency given the existing charging resources, strategically placing and identifying charging resources, including stationary chargers, to support emergency evacuation could be a valuable future research direction. Moreover, one future extension of our research could incorporate equity-aware analyses that jointly consider systemwide efficiency and distributional fairness. This includes examining how priority-based charging may disproportionately affect households with limited home charging opportunities and/or higher energy needs, and developing multiobjective formulations that balance total evacuation delay with equity metrics. Finally, a promising avenue for practical deployment would be to embed the proposed model into a lightweight decision-support tool with a user-friendly interface to assist emergency management agencies in real-time operational planning.
Footnotes
Author’s Note
The authors used ChatGPT (OpenAI GPT-4.5) to support the revision and clarity enhancement of the text grammar. No model was used to generate analysis, results, equations, or novel scientific content.
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Z. Guo; data collection: M. R. Ghorbanali Zadegan; analysis and interpretation of results: Z. Guo, M. R. Ghorbanali Zadegan; draft manuscript preparation: M. R. Ghorbanali Zadegan, Z. Guo. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Science Foundation under CAREER Award No. 2521735.
Data Accessibility Statement
The data that support the findings of this study are available from the corresponding author, Z. Guo, on reasonable request.