
Abstract
This paper presents an integrated approach to optimizing microgrid management and electric truck logistics for transportation research. The experiment involves a 100 kW solar photovoltaic system, a 500 kWh battery energy storage system, the electric demand of a commercial building, and a heavy-duty vehicle charging system. The study aims to demonstrate how synchronized optimization of a microgrid control algorithm and a truck route algorithm can reduce overall system costs. The microgrid management system is designed to meet the constraints and requirements of a commercial electric truck charging scheduler. This integrated approach is an improvement over previous systems as it uses the scheduler’s outputs—such as time frames and energy requirements—as constraints for microgrid management. The truck scheduling algorithm iteratively learned to optimize charging times, ensuring that charging occurs during low-cost periods or when renewable energy is available. The electric vehicle scheduler adjusted truck arrival times based on the availability of clean energy sources, creating a feedback loop that continuously improves cost efficiency. Results indicated significant cost savings, with electric utility costs for electric vehicle (EV) charging being only 0% to 20% of the original value while the transportation system is only 23% to 64%, compared with the baseline scenario without the co-optimization framework. These findings suggest that the proposed integrated approach can effectively reduce costs and improve the efficiency of microgrid and electric truck operations. Uncoordinated charging schedules leads to a higher power demand than a well-organized battery electric truck (BET) dispatching strategy. Optimizing truck charging times and energy needs based on microgrid conditions can significantly reduce electricity and transportation costs.
Over the past decade, electric vehicle (EV) technologies, such as extreme fast charging (XFC), have advanced significantly. Despite this progress, the widespread adoption of EVs faces challenges such as the lack of fast charging stations. A smart, dynamic pricing scheme is necessary to encourage investment—considering the interactions between pricing, demand, and environmental factors—to maximize long-term profit.
Transportation is becoming increasingly electrified, and little research has been done into the rate of utility impact from EV truck charging. The impact of EV trucks on utility systems is a growing area of interest, especially as the transportation sector becomes more electrified. Here are some key considerations when assessing the impact of EV truck charging on utilities. As more EV trucks take to the roads, the electricity demand naturally increases. This can lead to higher peak loads, especially if many trucks charge simultaneously during peak hours. The existing electrical grid may need upgrades to handle this additional load. This includes the capacity to deliver more power and the robustness to handle fluctuations in demand, typical with EV charging. Utilities might need to implement or expand demand response programs to manage the load more effectively. This could involve incentivizing truck operators to charge during off-peak hours or using intelligent charging technologies that automatically adjust charging times based on grid demand. Utilities could increase their investment in renewable energy sources to mitigate the impact of increased electricity consumption and reduce their carbon footprint associated with EV charging. This also aligns with the broader environmental goals of reducing carbon emissions from the energy and transportation sectors. Utilities may need to reconsider their rate structures to accommodate EV trucks’ specific needs and consumption patterns. Special rates could be developed for commercial EV fleets to encourage efficient energy use and grid reliability. Integrating energy storage systems can help manage the load by storing excess energy during low-demand periods and releasing it during peak times. This is particularly useful in areas where EV truck charging significantly affects the grid.
Integrating microgrids with heavy-duty EV charging stations provides several key benefits, such as addressing energy management and promoting sustainable transportation. Heavy-duty EVs, such as buses, trucks, and commercial vehicles, require significantly more charging power than light-duty passenger vehicles. The concentrated demand from multiple heavy-duty EVs charging simultaneously can put a substantial strain on the local electricity grid, potentially leading to instability and increased peak demand charges. Microgrids can help manage this load by providing localized generation and storage resources, smoothing out the main grid’s demands. Microgrids enhance the resilience of charging infrastructure against grid outages. Integrating renewable energy sources, such as solar or wind, with energy storage systems (such as batteries), microgrids can ensure the continuous operation of EV charging stations during power outages or other grid disturbances. This is particularly crucial for commercial vehicles and essential for critical services and logistics.
This paper’s contributions are as follows:
Integration of truck scheduling in the optimization of microgrid facilities: This research investigates how truck scheduling can be integrated with microgrid optimization to enhance energy management and reduce costs.
Truck scheduling accounting for electric utility from microgrid charging: We explore how truck scheduling can be optimized by considering the availability and cost of electricity from microgrid charging, leading to significant cost savings.
Feedback loop framework for microgrid and regional distribution EV truck charging and truck dispatching: We propose a feedback loop framework to coordinate microgrid operations with regional distribution networks for EV truck charging and dispatching, ensuring optimal energy usage and reducing operational costs.
Literature Review
Microgrid
A microgrid consists of various distributed generators (DG), distributed storage (DS), and diverse customer loads. It represents an electric power distribution system segment downstream of the distribution substation to the end user. Emerging technologies such as mini wind turbines, photovoltaics (PV), micro-turbines, combined heat and power (CHP), fuel cells, and solar energy provide more opportunities for microgrid generation.
Szilagyi et al. ( 1 ) raised a minimized cost function using intelligent management methods for uncertain weather conditions to reduce the cost of the energy the microgrid produces. We can see that microgrids can be cost-optimized. Uddin et al. ( 2 ) proposed the potential cost benefit of the microgrids, including investing in the grid, which can mitigate risks, providing a safeguard against unpredictable and potentially high costs of emergency energy. It also protects against fluctuating electricity bills. Meanwhile, depending on local market regulations and incentives, microgrids (MGs) can reduce peak load prices, participate in demand response (DR) markets, and offer frequency regulation services to the larger grid. This can generate revenue by lowering peak load costs, engaging in DR markets, and providing frequency management services to the rest of the grid.
Solar Energy
Kannan and Vakeesan ( 3 ) discuss the need for solar industry, covering its fundamental concepts and the global energy scenario. They highlight research efforts to advance the industry, explore its potential applications, and address barriers to improving the solar industry in the future, aimed at resolving the energy crisis. They show how using solar energy as a clean energy source with batteries can reduce energy and demand costs. The impacts and additional load requirements are assessed in Pourasl et al. ( 4 ). They proposed that in the next three decades, the solar photovoltaic sector has the potential to become the second most significant generation source. By constructing more solar farms, countries could meet approximately 25% of the world’s total electricity needs by 2050.
Charging Infrastructure
Knowing the requirements for microgrids leads to a need to allocate charging loads for passenger EVs, as seen in medium- and heavy-duty electric vehicle infrastructure development. The issue of charging EV trucks is examined in Bierlaire ( 5 ) who looks at charging solutions for a battery-electric truck white paper. To ensure that infrastructure is developed in tandem with truck deployment at a reasonable cost, regulations should set targets for charging infrastructure deployment and update power sector regulations accordingly. Direct support through pilot projects and financial incentives can build confidence and facilitate scaling in the initial phases of charging infrastructure development. There is a need to study heavy-duty truck charging in a microgrid setting.
Microgrid Energy Management and EV Freight Truck Scheduling
Significant advances have been made in microgrid energy management algorithms in recent years. Earlier versions of the algorithm, such as those discussed in Hasan et al. ( 6 ) and Fernando Enriquez-Contreras et al. ( 7 ), focused on optimizing microgrid energy but did not consider the management of EV charging loads. These studies highlighted the potential of microgrids to manage local energy resources effectively but fell short of integrating EV charging load management.
Dynamic load allocation has been explored in Lee et al. ( 8 ), who thoroughly address dynamic load allocation with many passenger EV chargers, and in Luke et al. ( 9 ), where the co-optimization of autonomous vehicle scheduling and EV charging was considered. However, these studies treated the EV charger as an independent system and did not integrate the EV truck charger as part of the microgrid.
The study by Garrido et al. ( 10 ) looked into freight truck scheduling with EV charging but, like previous studies, it did not consider the EV charger within the context of the microgrid’s overall energy management. Conversely, Purvins et al. ( 11 ) optimized EV charging with respect to the microgrid but did not incorporate vehicle scheduling.
This represents a significant gap, as optimizing the energy distribution within a microgrid that includes EV truck charging can lead to more efficient and cost-effective operations. The dual role of the microgrid in providing renewable energy at certain times and dealing with the limitation of cheap power availability is largely overlooked. This paper aims to bridge this gap by combining freight vehicle scheduling with microgrid energy management, including the dynamic allocation of EV truck chargers.
For the EV freight truck scheduler, this paper builds on methodologies described in Peng et al. ( 12 ), Wang et al. ( 13 ), and Zhang et al. ( 14 ). These studies developed robust frameworks for freight scheduling but did not account for the availability of microgrid energy at the home base. Similar issues were found in works on EV truck scheduling by Toth and Vigo ( 15 ), Vincent et al. ( 16 ), and Goeke and Schneider ( 17 ), and, as mentioned earlier, Garrido et al. ( 10 ). These frameworks did not consider the dynamic interaction between EV truck chargers and the microgrid, especially the intermittent availability of renewable energy and the variability in energy costs.
This paper addresses these research gaps by integrating freight vehicle scheduling with microgrid energy management. It provides a comprehensive solution that includes the dynamic allocation of EV truck chargers within the microgrid context.
Methodology
Dispatch Center Charging Station Layout
The EV truck charging station located at a dispatch center comprises the building’s loads (heating, ventilation, and air conditioning [HVAC] systems, lighting, 110V outlets, and passenger vehicle chargers), a 100 kVA solar inverter, a 500 kWh battery energy storage system (BESS), and an inverter for charging and discharging the BESS. Data from Enriquez-Contreras et al. ( 18 ) are used as a reference for the solar use in an average building. Figure 1 illustrates the power sources connected to the truck charger alongside the other building loads.
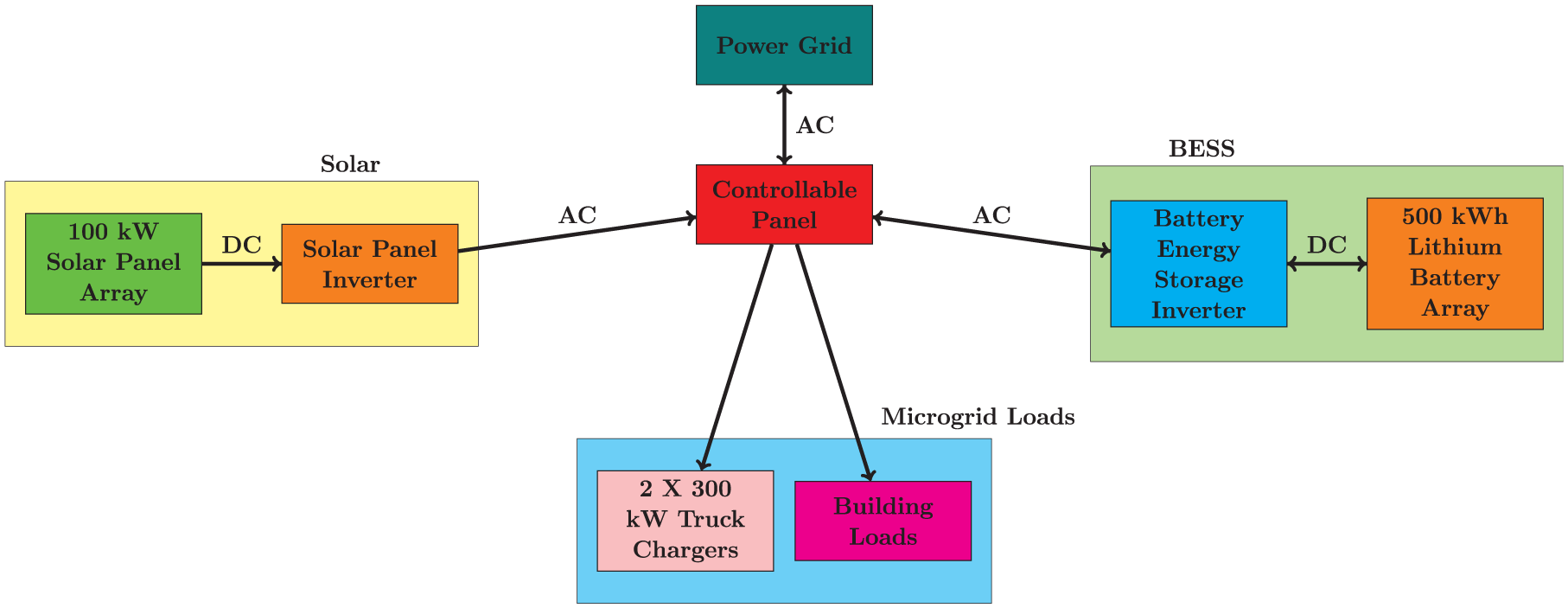
Set-up for a small electric truck dispatch center with two electric vehicle (EV) chargers.
The main breaker panel receives power from three sources: the power grid, the solar inverter, and the battery inverter. The solar inverter is unidirectional, delivering power solely to the building. In contrast, the power grid and BESS inverter are bidirectional, meaning they can supply power to the building and consume power from it. The battery trailer draws power by charging the batteries.
The truck charger consists of a 350 kW EV truck charger. While power can be sent back to the grid, this experiment prioritizes sending excess solar power to EV trucks. This set-up aims to supply energy efficiently and reduce the site’s overall demand.
The methodology ensures that the integrated system optimizes the use of solar power and BESS to manage the energy demands of both the building and the EV trucks, enhancing energy efficiency and cost savings.
Microgrid Electricity Costs
This study’s primary focus is calculating costs and optimizing the microgrid and electric trucks, emphasizing the importance of accurately assessing and understanding billing costs. Electric rates comprise two main components: demand charges and energy charges.
The demand charge represents the maximum power value recorded within a 15-min interval over the entire month. The energy charge, on the other hand, is the total energy consumed throughout the month.
For commercial customers, the sum of demand and energy charges constitutes the bulk of electric utility costs. These charges are further influenced by time-of-use (TOU) rates, which vary depending on the time of day and are typically categorized into off-peak, mid-peak, on-peak, and, in some seasons, super off-peak periods.
The TOU rates used in this experiment are sourced from Southern California Edison (SCE) and are the TOU-GS-2 rate shown in Table 1. These TOU rates apply only when power is drawn from the grid. However, since the microgrid in this study has abundant energy, the primary objective is to minimize power drawn from the grid, instead supplying power to the building or charging electric trucks.
Weekday Time-of-Use (TOU) Schedule Rates for Southern California Edison ( 19 )
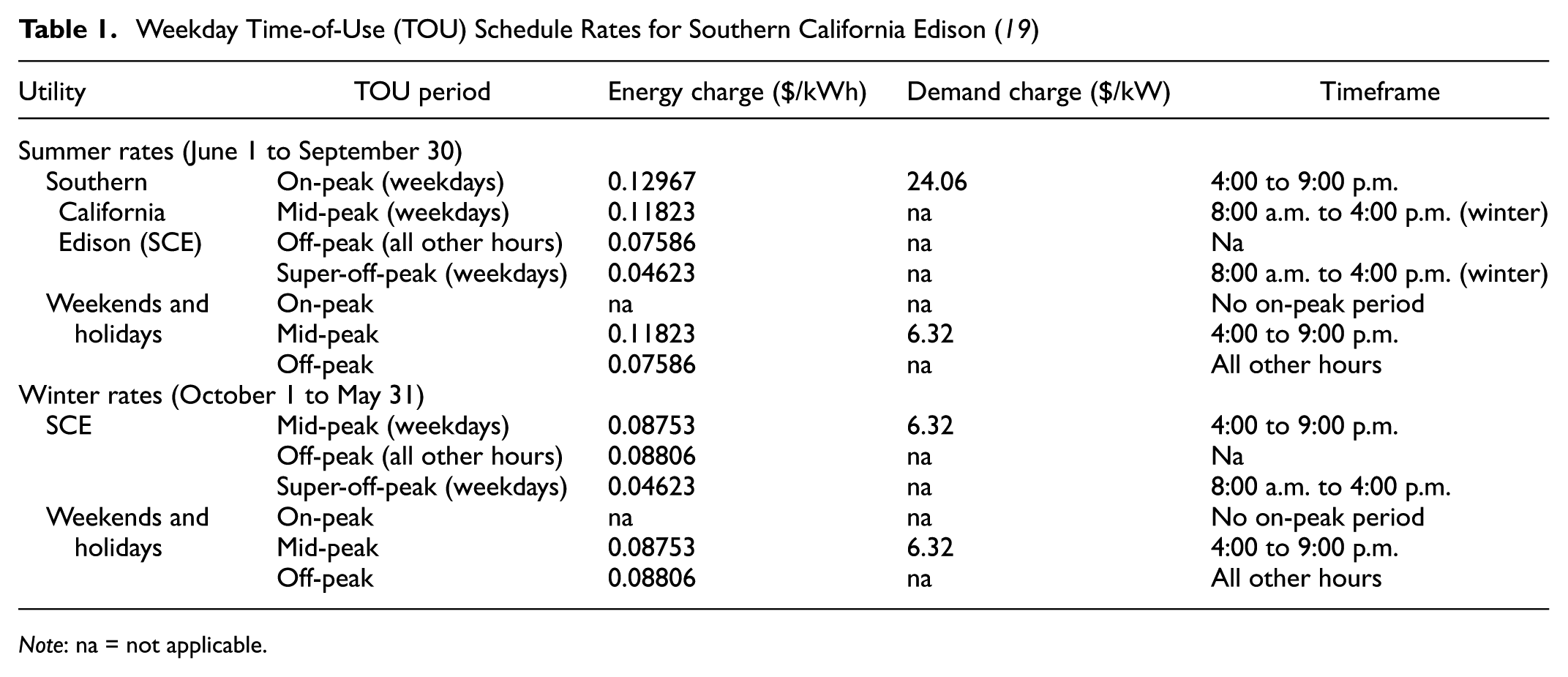
Note: na = not applicable.
In certain situations, the microgrid may need to export power to the grid. As of April 15, 2023, the California Public Utilities Commission (CPUC) mandates that SCE use net billing tariffs for non-grandfathered customers ( 20 ). These export rates differ from net energy metering rates, typically offering lower compensation for energy than retail rates, except during periods of high demand.
By carefully considering these factors, the optimization model aims to reduce overall costs while efficiently managing the energy distribution between the microgrid, the building, and the electric trucks.
Dispatch Center Microgrid EV Truck Charging Algorithm
subject to














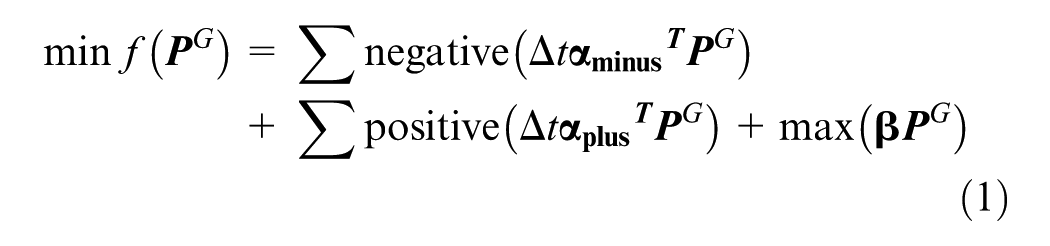
This optimization function, adapted from Hasan et al. ( 6 ) and Fernando Enriquez-Contreras et al. ( 7 ), minimizes the utility costs of a microgrid with solar photovoltaic (PV), a BESS, building demands, and an EV charging station. The objective function minimizes the sum of energy and demand costs while accounting for energy export compensation (Equation 1). Table 2 summarizes the key symbols and parameters used in the microgrid-based electric vehicle truck charging algorithm.
Microgrid Electric Vehicle Truck Charging Algorithm Nomenclature
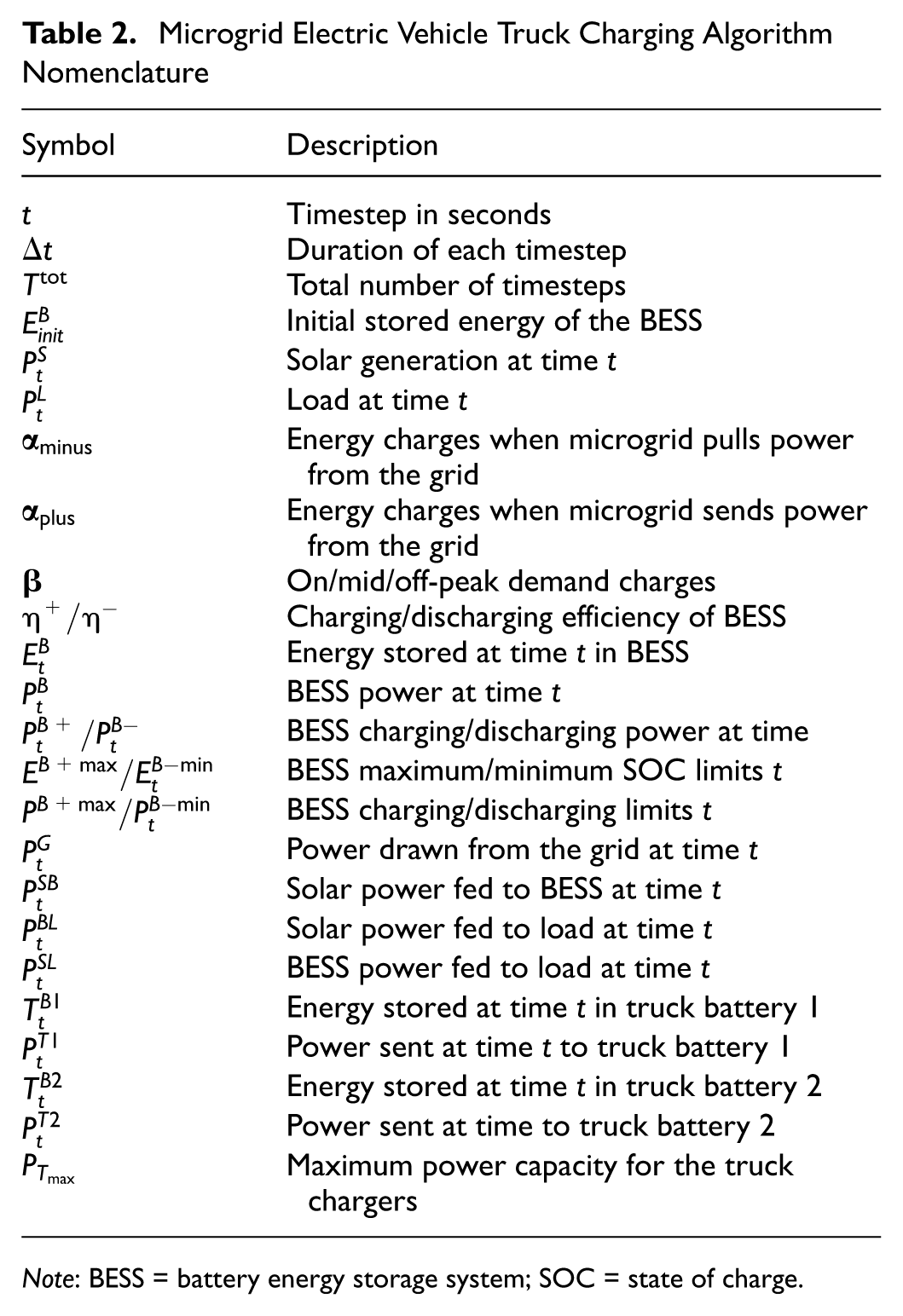
Note: BESS = battery energy storage system; SOC = state of charge.
When power is pulled from the grid, the positive values are multiplied by alpha_minus, an array of TOU costs for the given period. The product of these values is summed to find the energy cost for the winter and summer rates, respectively. When power is sent to the grid, the negative values are multiplied by alpha_plus, an array of net billing tariffs for April and July. The maximum power pulled and sent to the grid calculates the demand costs.
The following constraints ensure that the optimization algorithm follows the electrical properties and that the truck battery is charged during its specified time frame. Equation 2 ensures that the BESS starts from an initial state of 50% state of charge (SOC), or 250 kWh. After the initial state, the battery state is updated by adding the amount of power charged or discharged during the time interval (Equation 3), while adhering to the lowest and highest SOC limits (Equation 4). Equations 5 and 6 limit the amount of power that can be charged or discharged from the BESS, while Equation 7 combines charging and discharging into a single value for Equation 3. Equation 8 limits the amount of power that can be charged to the truck battery. The solar value provided equals the sum of the net load, truck, and battery charging (Equation 9). The load value provided equals the sum of the net load and battery discharging (Equation 10).
Equations 12 and 13 are the main contributions of this paper, specifically adapted to truck routing schedules. While the electric battery in the BESS is available for the entire period with a variable final charge state, the truck battery is only available during a predetermined period set by the route scheduler, with the truck charging period following this same timeframe. The truck battery’s initial and final charge states must match the values the truck scheduler sets. This optimization varies from previous work by allowing the truck scheduler to determine some of the constraints for the feedback loop. The function returns the cost value to the scheduler, which adjusts the timeframe and charge amount to reduce costs further. Equations 14 and 15 are the same formulation but are for the second truck and subsequently added to the constraints.
Dispatching Method
The dispatching model follows the assumptions that include:
The BET fleet dispatching follows the backhaul strategy ( 15 ). The customers are divided into two groups, including linehaul customers who require deliveries and backhaul customers who require pickups. For each trip, the linehaul customers should be visited first, followed by the backhaul customers. A trip containing only backhaul customers is not allowed.
Similar to Zhang et al. ( 14 ), a microscopic energy consumption model ( 21 ) is applied to estimate energy consumption and the potential equivalent greenhouse gas emissions.
The truck fleet is allowed to visit home-based recharging facilities at the distribution center (DC) once during operation. The DC has smart grid energy allocation to control the load distribution across the power grid, 100 W solar system, and energy storage systems (ESS).
The total operation time is limited. The truck fleet should start operation at
We assume the initial SOC
Dispatching Model Formulation
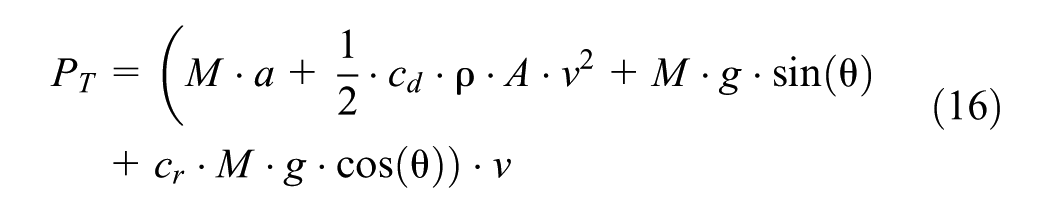
The purposes of the dispatching algorithm are twofold. On the one hand, the dispatching algorithm aims to find a set of routes that minimize the total transportation energy cost. On the other hand, a favorable home-based recharging visit is determined. To estimate the energy cost of the BET fleet, we apply a real-world energy consumption model used in Peng et al. (
12
). First, the required tractive power
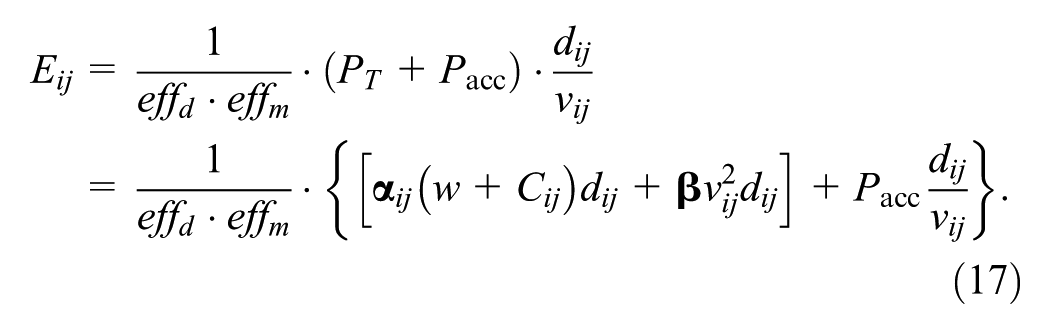
Adopted from Wang et al. (
13
) and Zhang et al. (
14
), the electric energy consumption
Extending the integer programming model presented in Toth and Vigo (
15
), the dispatching model can be defined in a directed graph
Truck Dispatching Algorithm Function
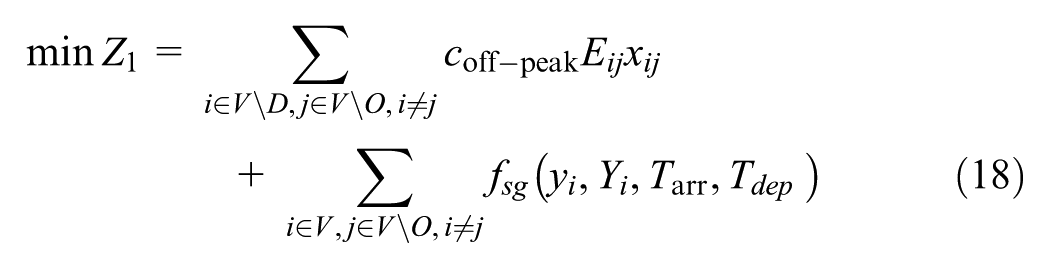
The integer linear programming model formulation for the proposed dispatching problem is shown in Equation 17. The first term
Subject to:










The proposed dispatching model extends (
21
). Equation 18 shows the objective function of the developed co-optimization framework, aiming to minimize the total energy cost. Considering the backhaul strategy, Constraints 19 and 20 denote the forward and backward flows, respectively. Constraint 21 defines flow conservation. The initial SOC for a BET is limited and the upper bound of initial total energy is
Co-Optimization Framework
The co-optimization framework is depicted in Figure 2.
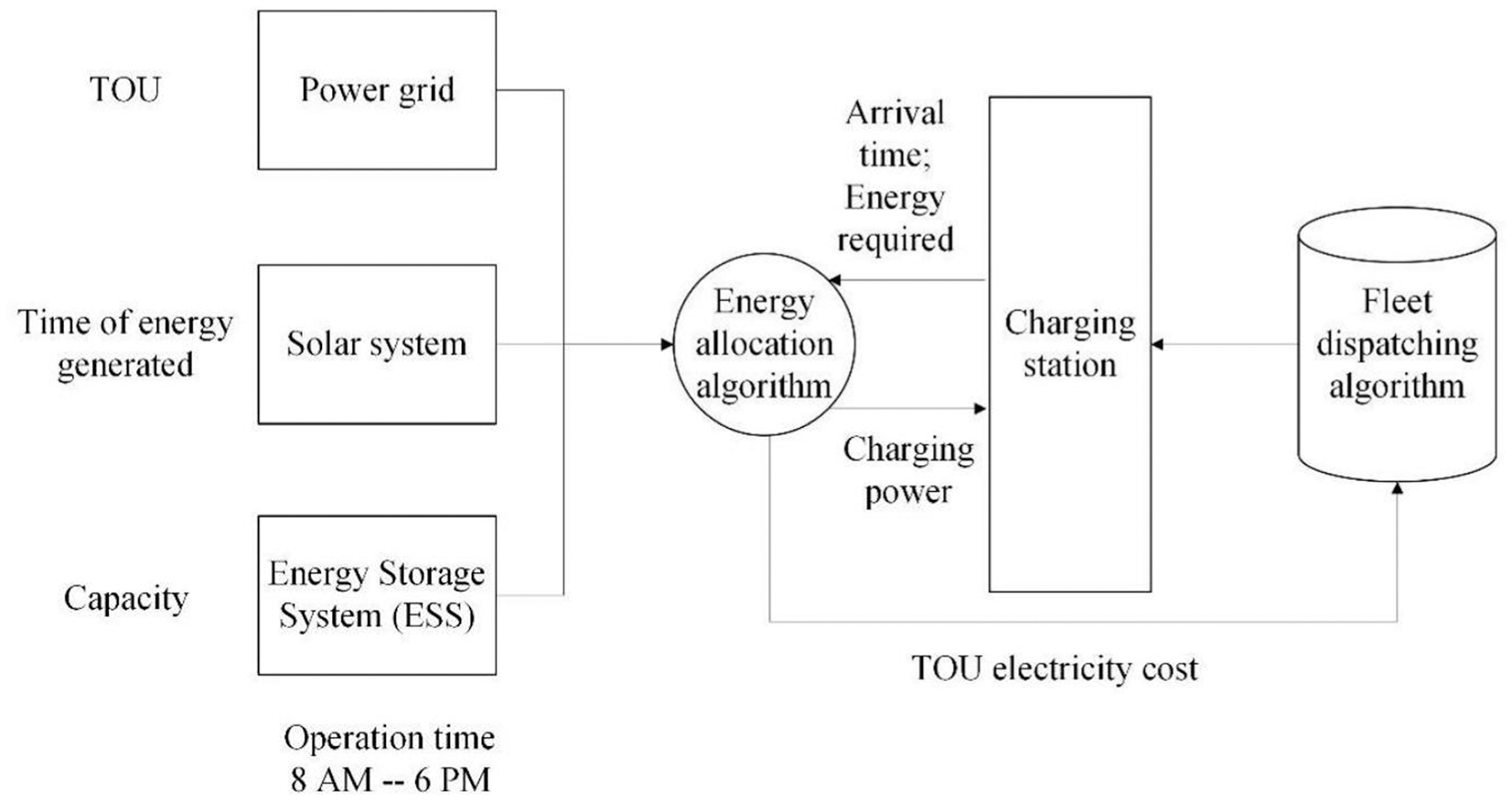
Co-optimization framework integrating microgrid and battery-electric truck (BET) fleet dispatching. Considering a time-dependent power load distribution, the energy allocation algorithm can estimate the recharging cost when scheduling the recharging visit. The developed co-optimization framework aims to minimize the total energy use and the total recharging cost.
BET Dispatching Algorithm
A metaheuristics algorithm based on an adaptive large neighborhood search (ALNS) ( 22 , 23 ) is applied to solve the proposed dispatching problem. The ALNS metaheuristics algorithm has been widely used to solve the vehicle routing problem and its variations (see examples in 12 , 16 , 17 , 21 , 24 , 25 ). In this study, we developed an ALNS-based algorithm as a search engine to determine the energy-efficient route and favorable recharging schedule, which can achieve lower TOU costs.
The ALNS metaheuristic begins by generating an initial feasible solution for the BET routes. We use a modified greedy algorithm ( 26 ) to construct a set of initial feasible routes. At the beginning of the construction, a customer is randomly selected and inserted into a BET journey. A greedy algorithm is then employed to find a candidate customer and their optimal insertion location, determined by the lowest incremental cost. Given battery capacity constraints, this process continues until no more customers can be added to the current BET trips. At this point, a recharging visit is included in the current BET trip, allowing more customers to be added. The current BET route is completed when no additional candidate customers can be visited. Next, a new BET route starts following the same procedure. The greedy construction algorithm terminates once all customers have been inserted into the BET routes.
After generating an initial feasible solution, the ALNS-based metaheuristics algorithm is iteratively performed to find a better solution. Based on the ALNS framework built in ( 21 ), we modified the objective function to Equation 1. Next, we combined the ALNS algorithm with the energy allocation algorithm from a microgrid perspective. The intuition behind this idea is to minimize the total energy cost. We considered the energy cost for the dispatching service and the dynamic recharging cost, which depends on the dynamic power load.
In this section, we only briefly introduce the framework of the ALNS-based metaheuristics algorithm for limited space, and we refer interested readers to Peng et al. ( 21 ) for more details. Similar to Peng et al. ( 21 ), we use the same five removal operators (i.e., worst removal, shaw removal (22), random removal, path removal, and cluster removal operators) to destroy the solution partially. Then, three reconstruction operators (i.e., greedy, regret-2, and greedy with charging station insertion operators) are used to reconstruct a new solution. The weight of each operator can be updated according to the quality of the new solution. Then, a simulated annealing heuristic algorithm is implemented to determine if the new solution should be accepted. The ALNS algorithm terminates when the maximum iteration is reached. For the parameters of the ALNS algorithm, we apply the same parameters presented in [3], but we set the maximum iterations to 500, ensuring the time efficiency when combined with the energy allocation algorithm.
A Real-World Case Study in San Bernardino County, California
This section presents a real-world case study to assess the performance of our co-optimization framework. Real-world dispatching data from a full-service logistics company are used in this study. The data set can be accessed via the GitHub link: https://github.com/CurtisPeng123/Additional-material-for-the-BET-dispatching-with-microgrid-intergration. The data set from a heavy-duty diesel truck fleet containing customers’ historical iterations is sampled. It includes customer IDs, required weight, service types (deliveries or pickups), and locations. It is worth noting that the BET can reach the farthest point if fully recharged and is allowed to come back to the depot. To this end, we generate a real-world instance with 19 customers, including 14 linehaul customers and five backhaul customers. Table 3 summarizes the problem parameters.
Summary of Problem Parameters
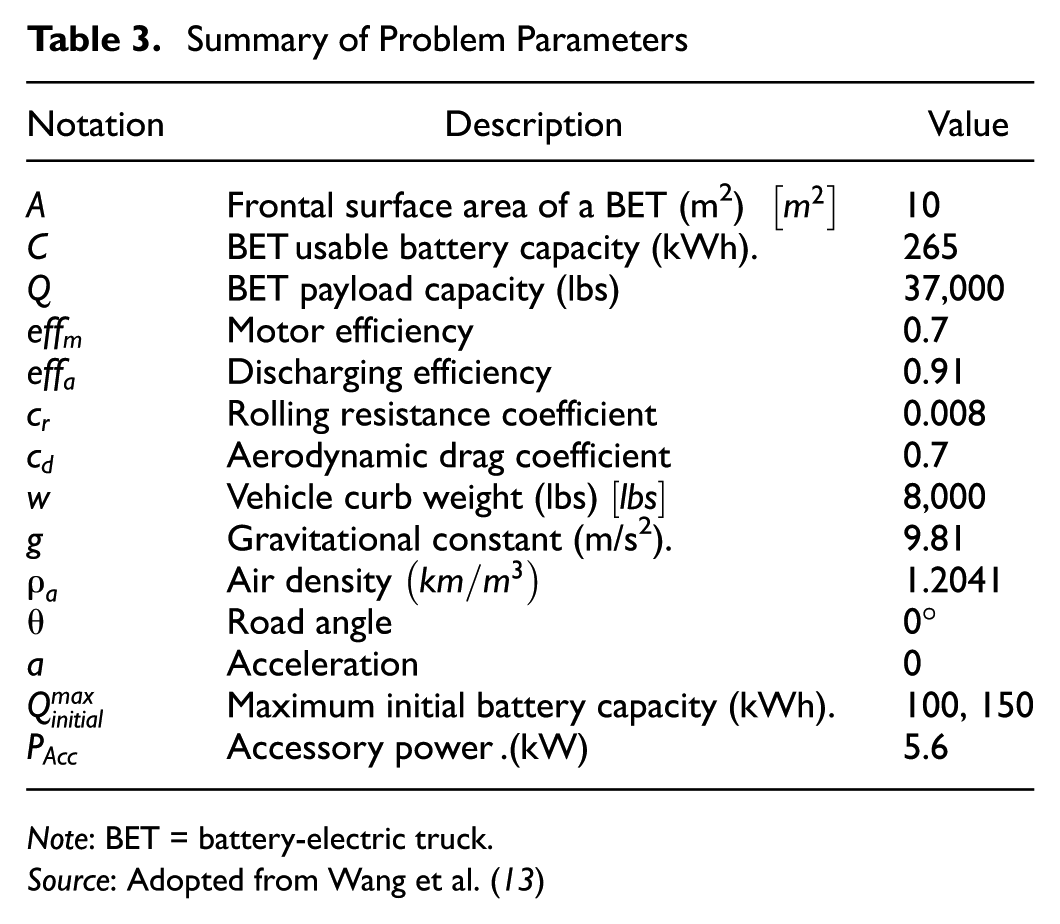
Note: BET = battery-electric truck.
Source: Adopted from Wang et al. ( 13 )
We devise three dispatching scenarios to investigate the solutions under different power load conditions, which are shown in the following:
Scenario I: In this scenario, BET dispatching does not incorporate the microgrid energy allocation algorithm. BETs can recharge at the charging station as needed, drawing energy directly from the power grid. Additionally, TOU rates for different seasons are considered, denoted as Scenario I-A (Baseline-Apr-TOU) for April and Scenario I-B (Baseline-Aug-TOU) for August.
Scenario II: BET dispatching with the co-optimization framework, where the microgrid energy allocation algorithm is applied to minimize recharging costs based on real-world load data. Two seasonal cases are considered: Scenario II-A for a typical day in April and Scenario II-B for a typical day in August.
For all dispatching scenarios, we assume that the BET fleet is partially recharged during the night with an off-peak rate since there is no solar energy during the night. We set the upper bound of the initial battery capacity
Results
Table 4 summarizes the detailed energy consumption in different dispatching scenarios. In contrast to the baseline strategy (dispatching without smart grid integration), the proposed co-optimization can significantly reduce the total energy cost, especially during April (i.e., winter season). Take scenario I with a smaller initial battery capacity as an example. Considering that the energy allocation algorithm can reduce total energy costs by 71.09% and 7.30% in April and August compared with baseline, respectively. The reason is that August puts a more significant strain on the power grid compared with April because of the other loads (e.g., HVACs). Therefore, the BET fleet prefers to charge the battery with high amount of charge with off-peak rate compared with April.
Experimental Results of Different Dispatching Scenarios
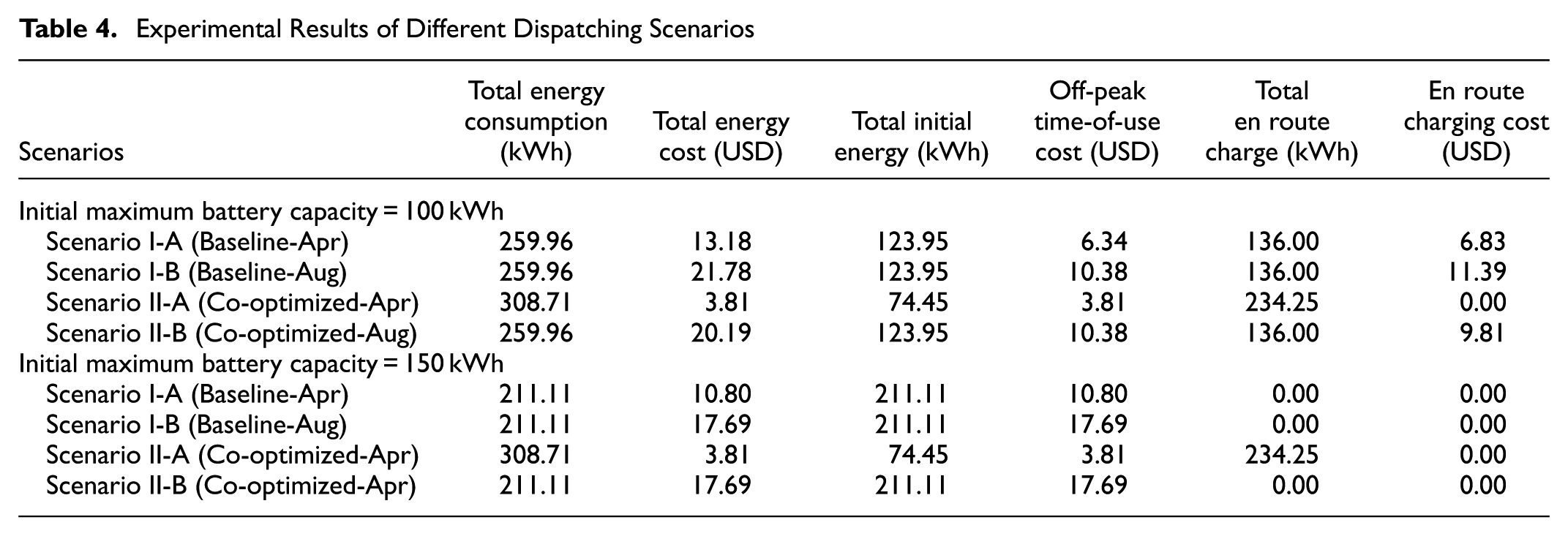
In contrast to different upper bounds on the initial battery capacity, the case study shows that a larger battery capacity for the BET fleet leads to lower total energy consumption costs. For instance, the total energy consumption in the baseline scenario is 259.95 kWh when the upper bound of the initial battery capacity is 100 kWh, which is 18.78% higher compared with the 150-kWh initial battery capacity. When the initial battery capacity is lower, the BET fleet needs to take detours for recharging during operation. Additionally, it is worth noting that total energy cost is relatively high during the summer season in the baseline scenario, even though the total energy consumption remains the same. This is a result of the higher TOU rates in summer compared with winter.
The total energy consumption in Scenario I is relatively lower than in other dispatching scenarios because the impacts of microgrid load and dynamic TOU rates are not considered. The BET fleet aims to find the most energy-efficient dispatching solutions. However, considering power loads and time-varying TOU rates in Scenarios II-A and II-B, decision makers should consider a better recharging schedule to optimize the charging costs, such as using clearer energy from solar systems or the ESS as much as possible. Figures 3 to 5 show the experimental results of the dispatching solutions. Each colored line represents a BET route.
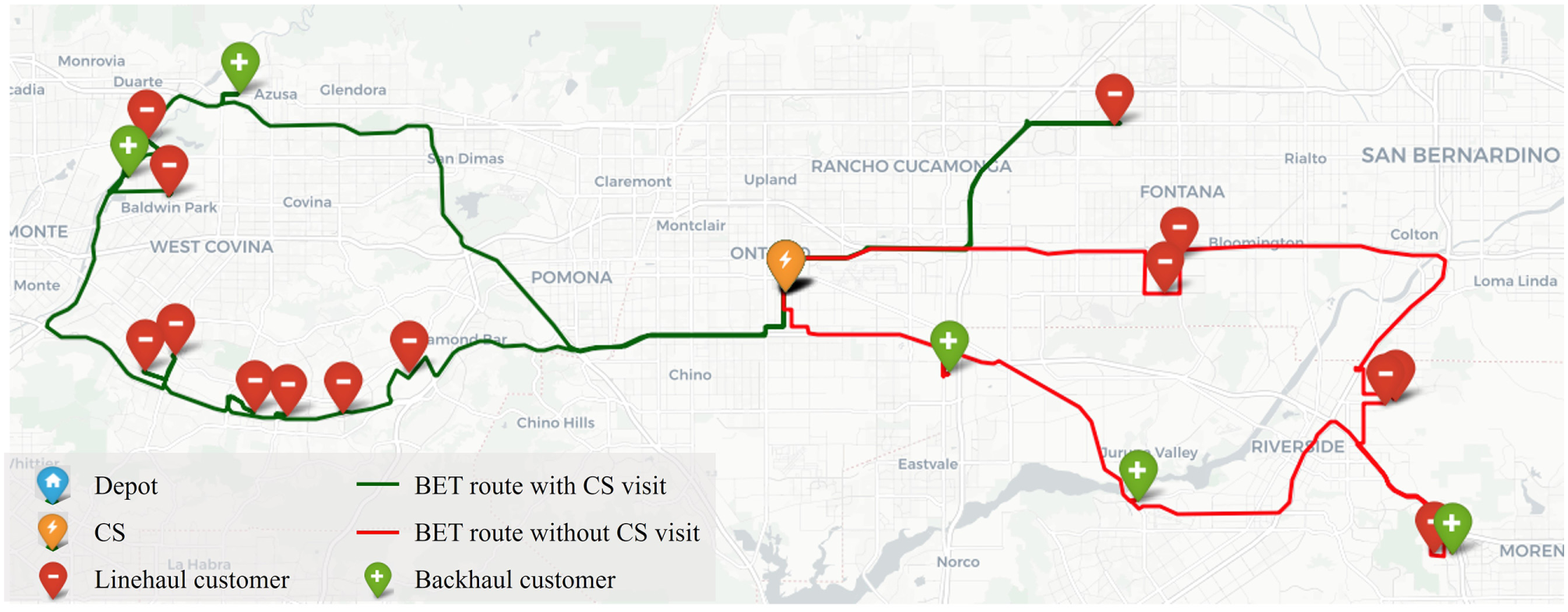
Routes for Scenario I baseline with 100 kWh maximum battery energy (April and August).
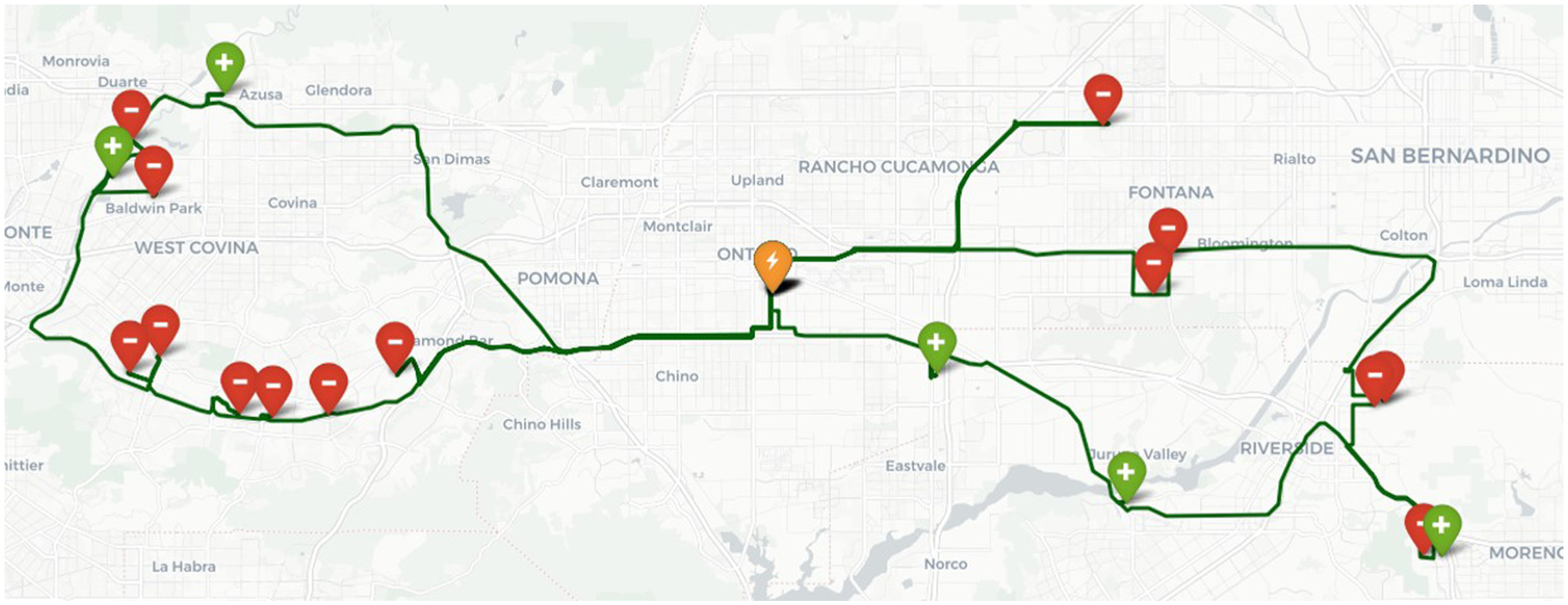
Routes for Scenario II (April) with 100 kWh maximum battery energy.
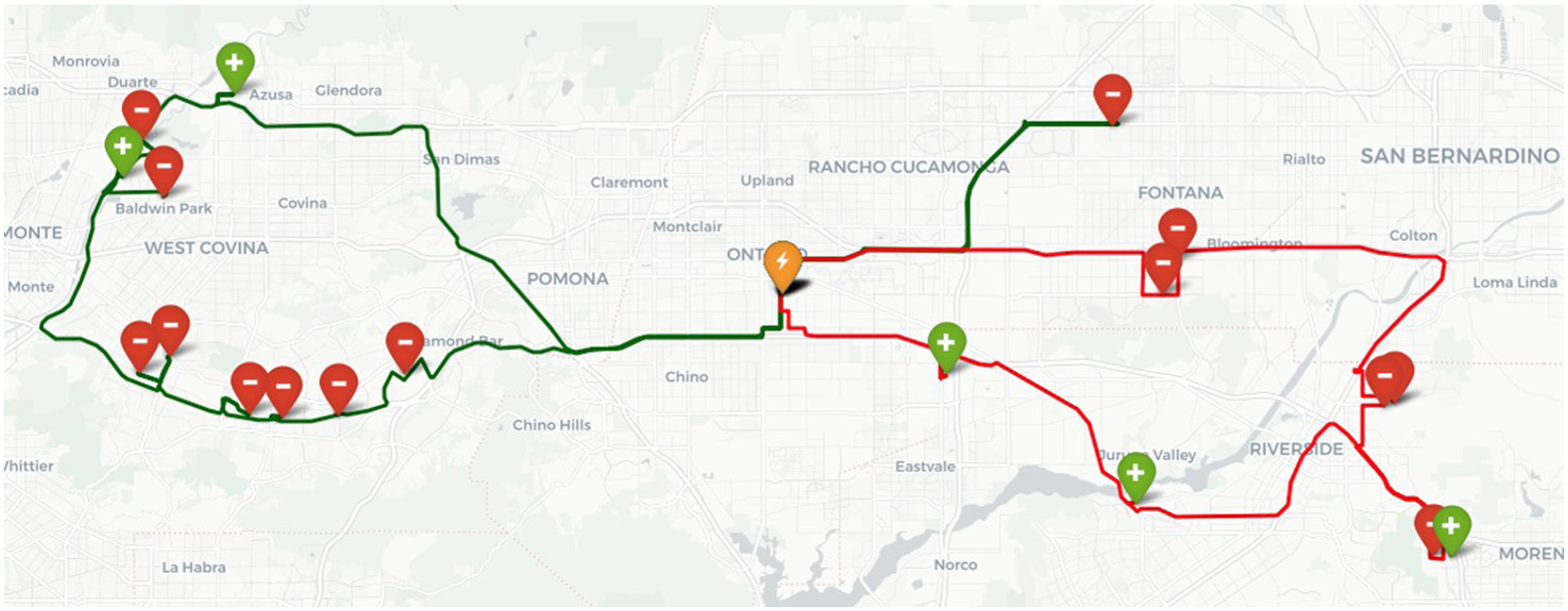
Routes for Scenario III (August) with 100 kWh maximum battery energy.
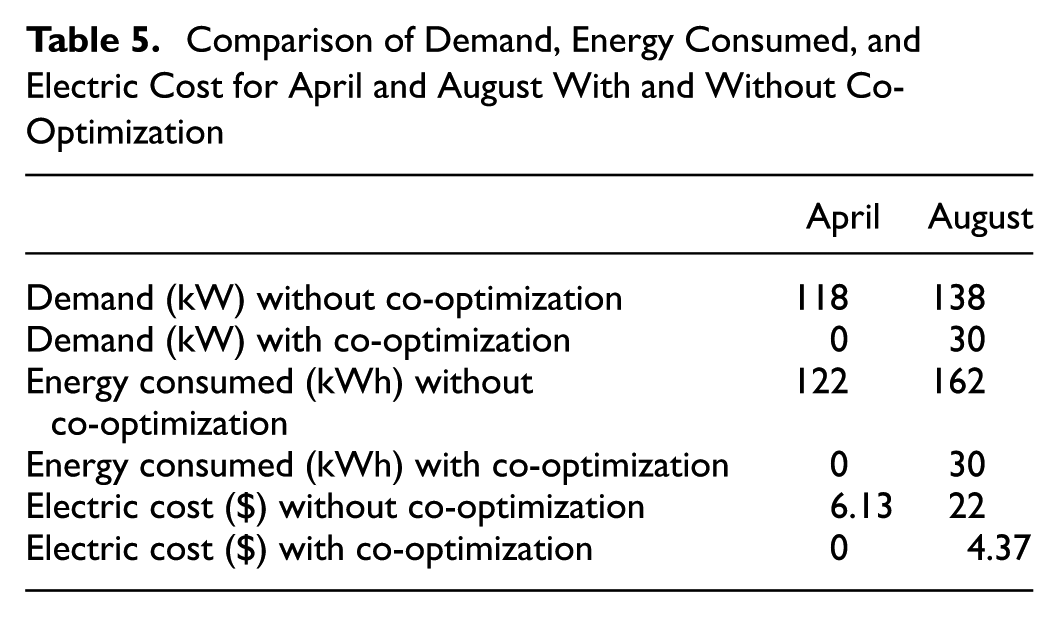
Optimization proves to be an effective tool for reducing demand costs that are a significant concern for a grid. Without the co-optimization, the demand was 118 and 138 kW compared with 0 and 30 kW for April and August, respectively. The energy consumed from the grid was 122 and 162 kWh for the non-co-optimized solution and 0 and 30 kWh for April and August, respectively. The electric cost for that day without the co-optimization is $6.13 and $22 for April and August, respectively, while it is $ 0 and $4.37 when co-optimized. Results for the daily maximum demand, energy usage, and costs are shown in Table 5. Figures 6 to 9 show the power flow output for the microgrid truck optimization. The objective is to minimize the power imported from the grid to the microgrid (PG), keeping it as close to zero as possible. The non-co-optimized algorithm does not know the optimal charging duration or energy needed for the truck batteries, leading to a higher demand for the microgrid. The scheduler and microgrid working in tandem solve an issue that still currently plagues passenger EV systems. The current solution is for a user to input their needs. Users are not very accurate with their needs, which contrasts with a truck EV system where the operator owns the EV chargers and truck, and co-optimization becomes necessary.
Comparison of Demand, Energy Consumed, and Electric Cost for April and August With and Without Co-Optimization
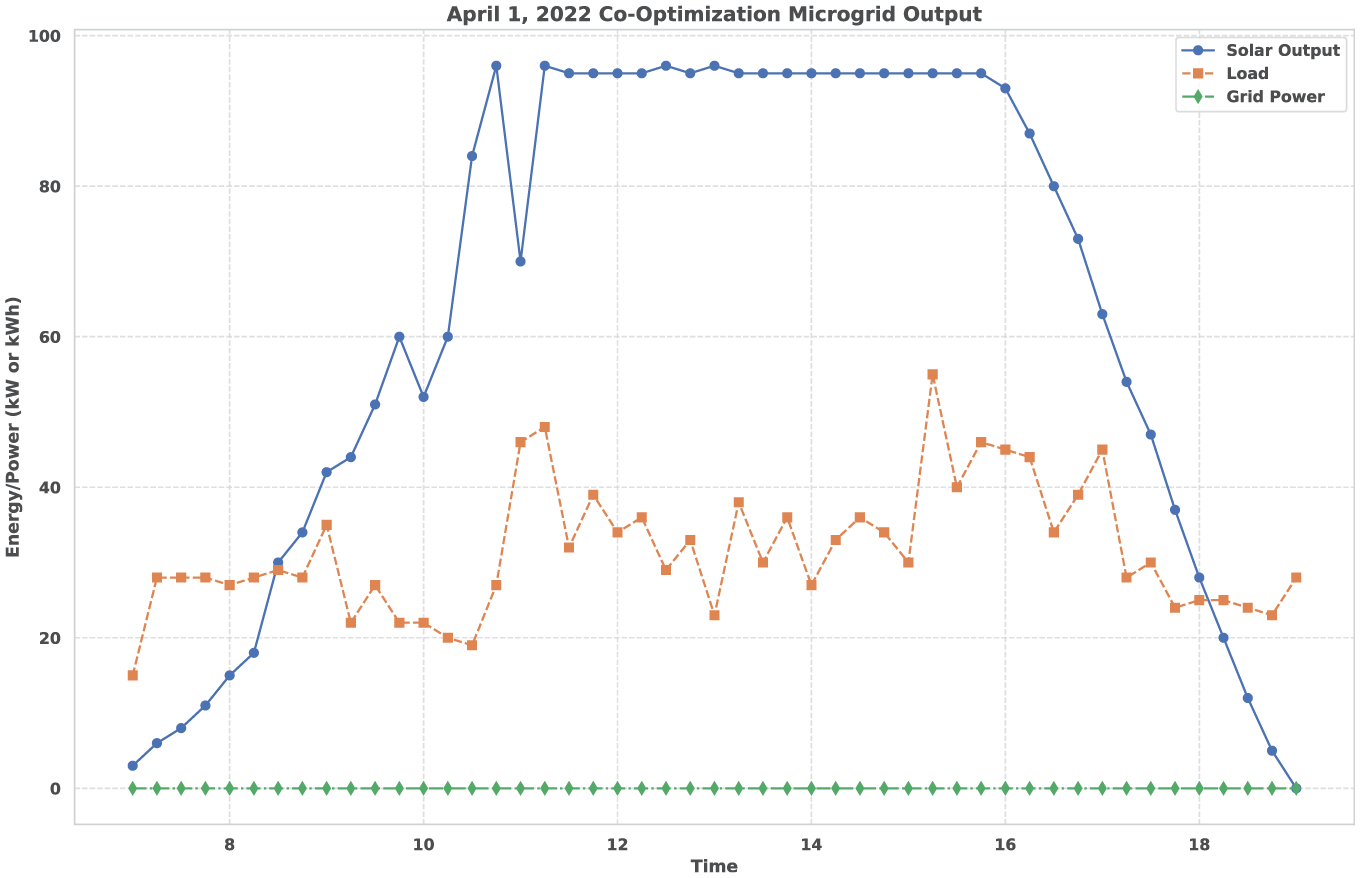
“Winter month” co-optimized microgrid output.
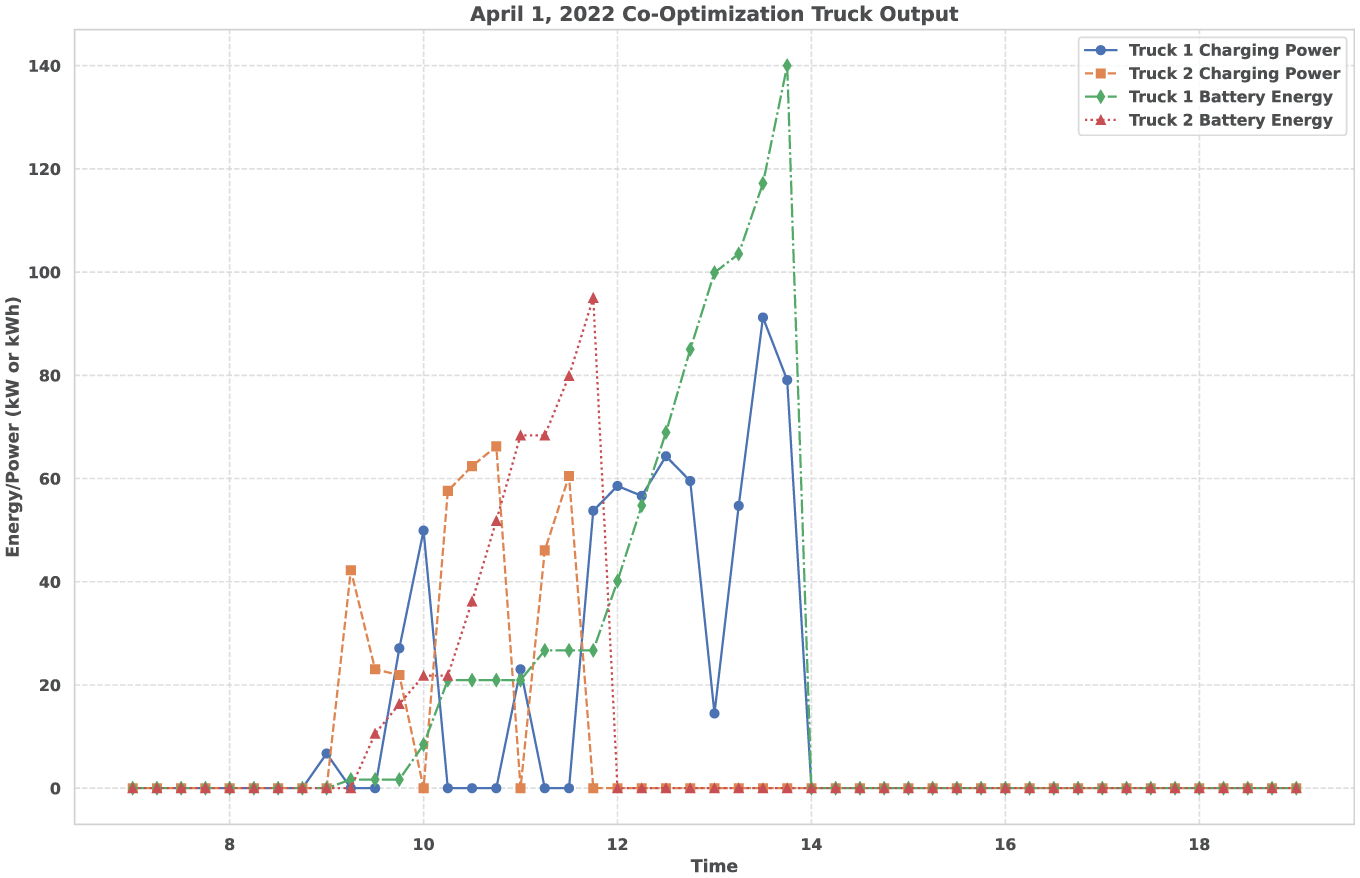
“Winter month” co-optimized truck power output and battery state.
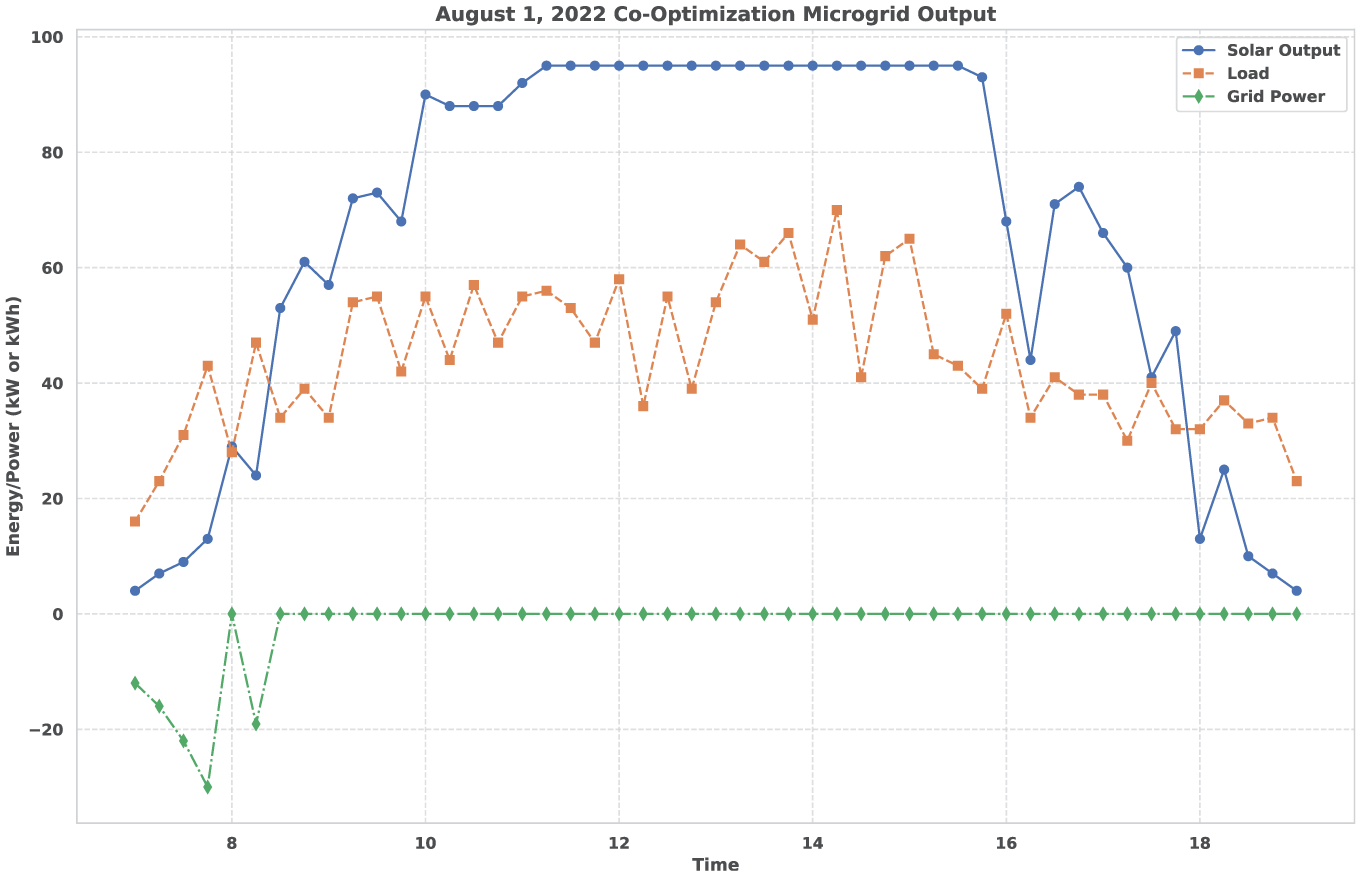
“Summer month” co-optimized microgrid power output
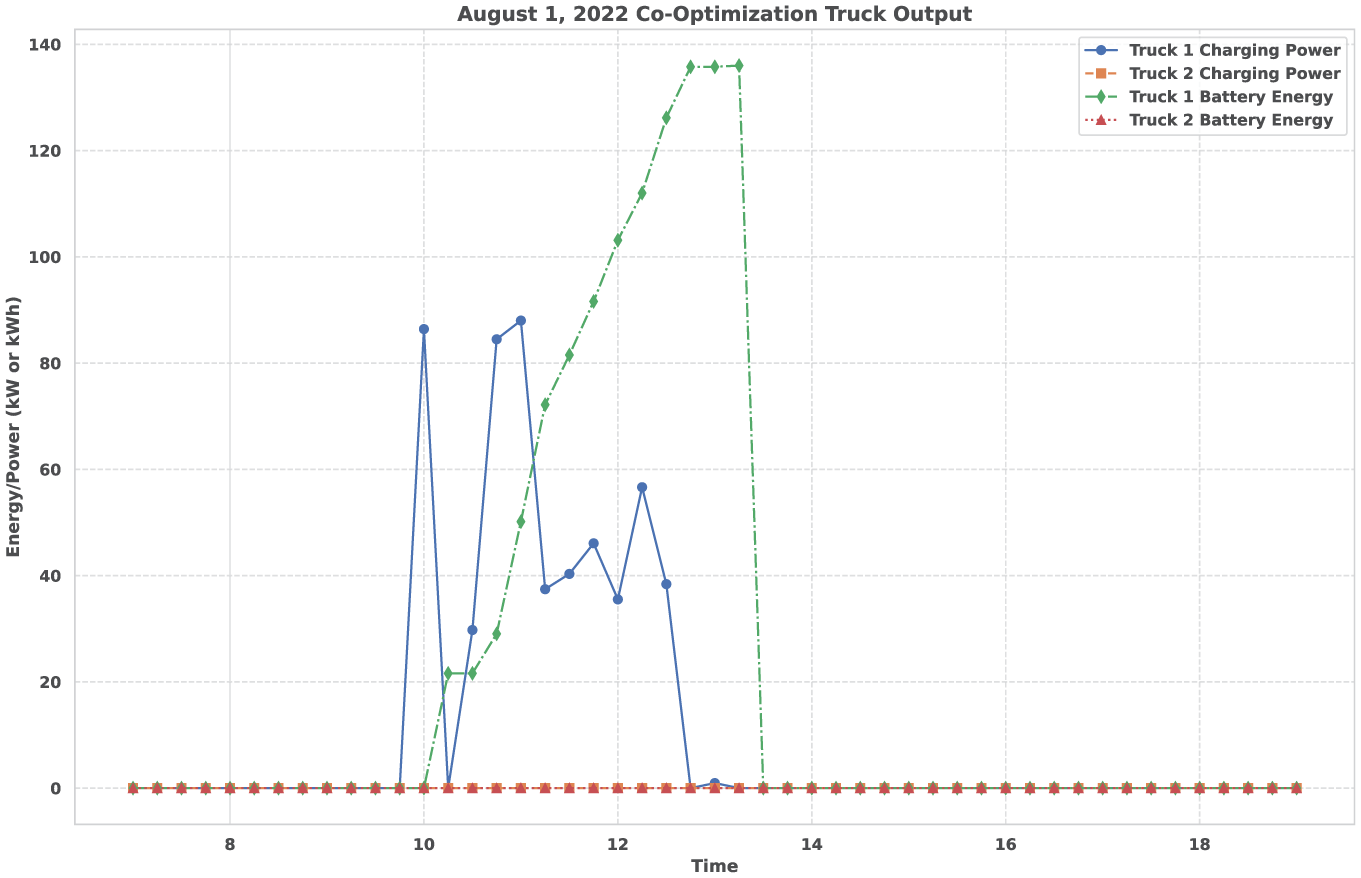
“Summer month” co-optimized truck power output and battery state.
August is a more significant strain on the grid compared with April since the other loads, such as HVACs, tend to peak during the summer months. In Figures 6 to 9, the microgrid prioritized solar power to charge both of the trucks since it was a short period. Additionally, the algorithm demonstrates the charging of the first and second trucks. This behavior is depicted in the truck battery state lines, where plateaus indicate periods when a truck is not charging, and rises indicate active charging, The co-optimization is effective with different initial states of charge in the truck battery, reducing the costs and demand to lower amounts. The truck dispatching algorithm scheduled one truck during the summer months, as electricity costs are higher and the microgrid faces increased constraints given the additional demand from HVAC systems.
In contrast, the non-co-optimized algorithm (Figures 10 to 13) lacks knowledge of the optimal charging duration and the specific energy requirements of the truck batteries, leading to higher demand and suboptimal performance for the microgrid. The scheduler and the microgrid collaboration address issues currently challenging passenger EV systems. Unlike passenger EV users, who often inaccurately estimate their energy needs, operators of truck EV systems manage both the EV chargers and the trucks, making co-optimization beneficial and necessary. In the non-co-optimized cases, a higher SOC leads to lower demand and SOC costs. This further demonstrates the need to integrate the truck dispatching and microgrid energy management algorithms.
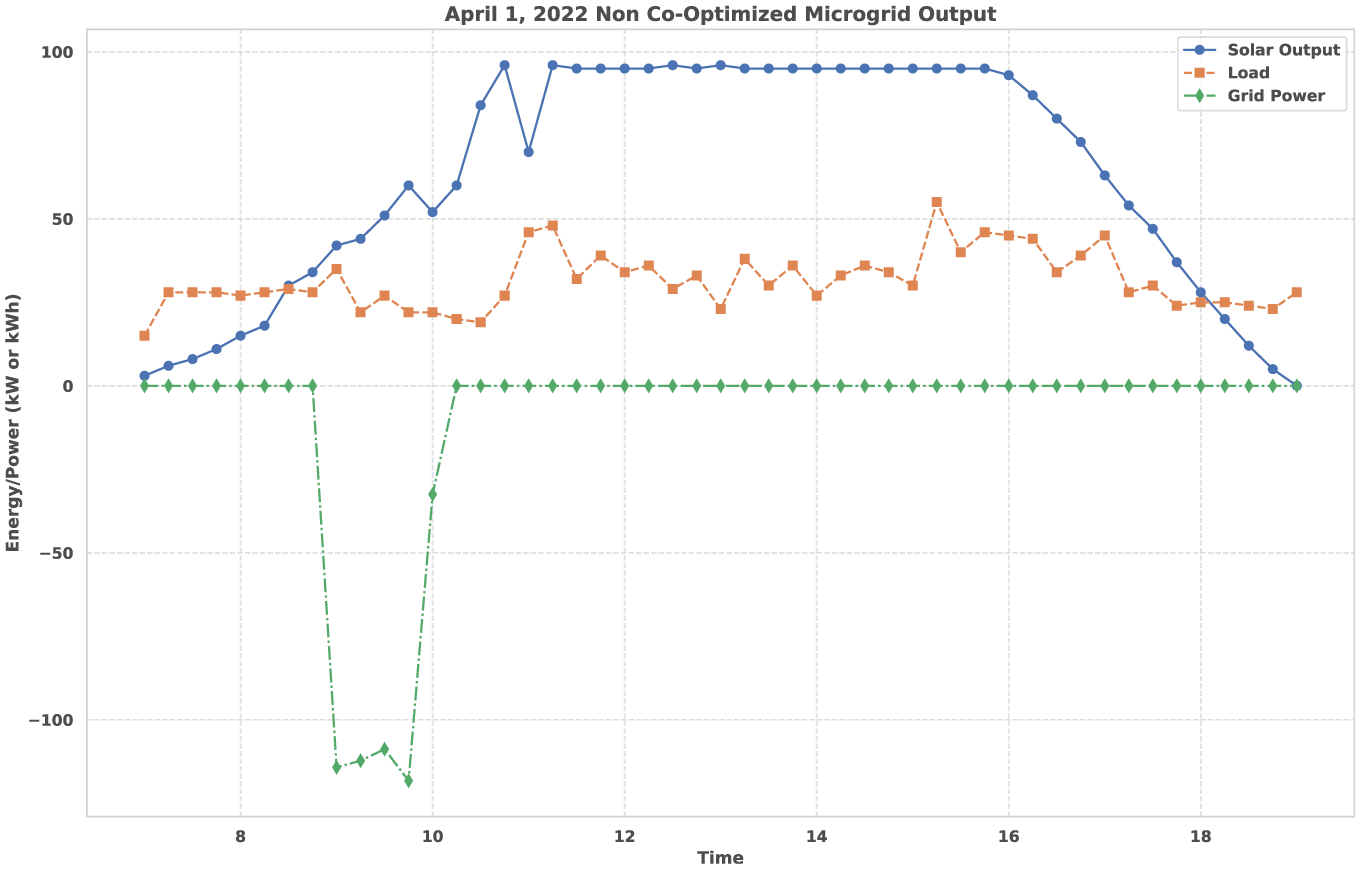
“Winter month” non-co-optimized microgrid power output.
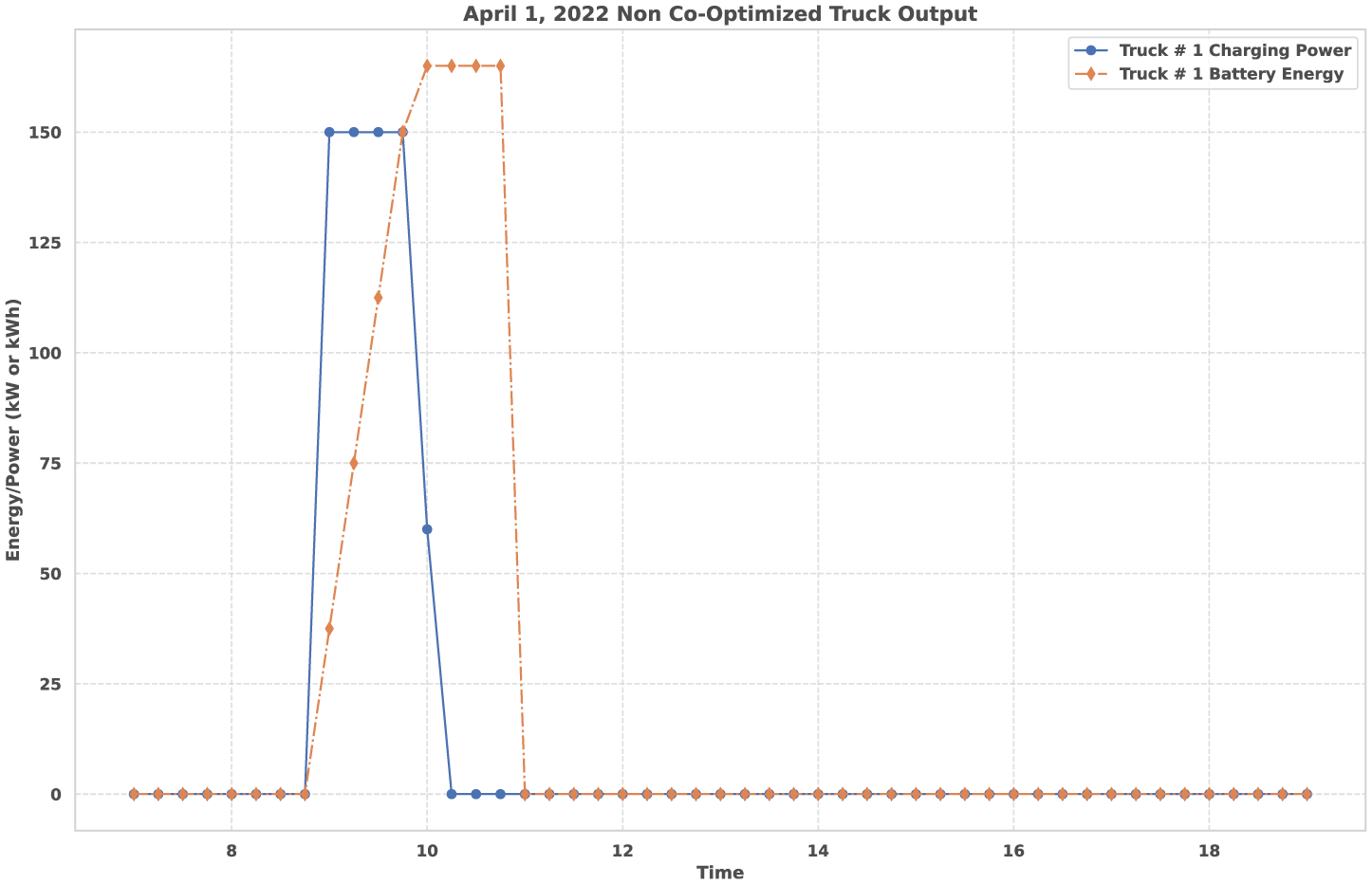
“Winter month” non-co-optimized truck power output and battery state.
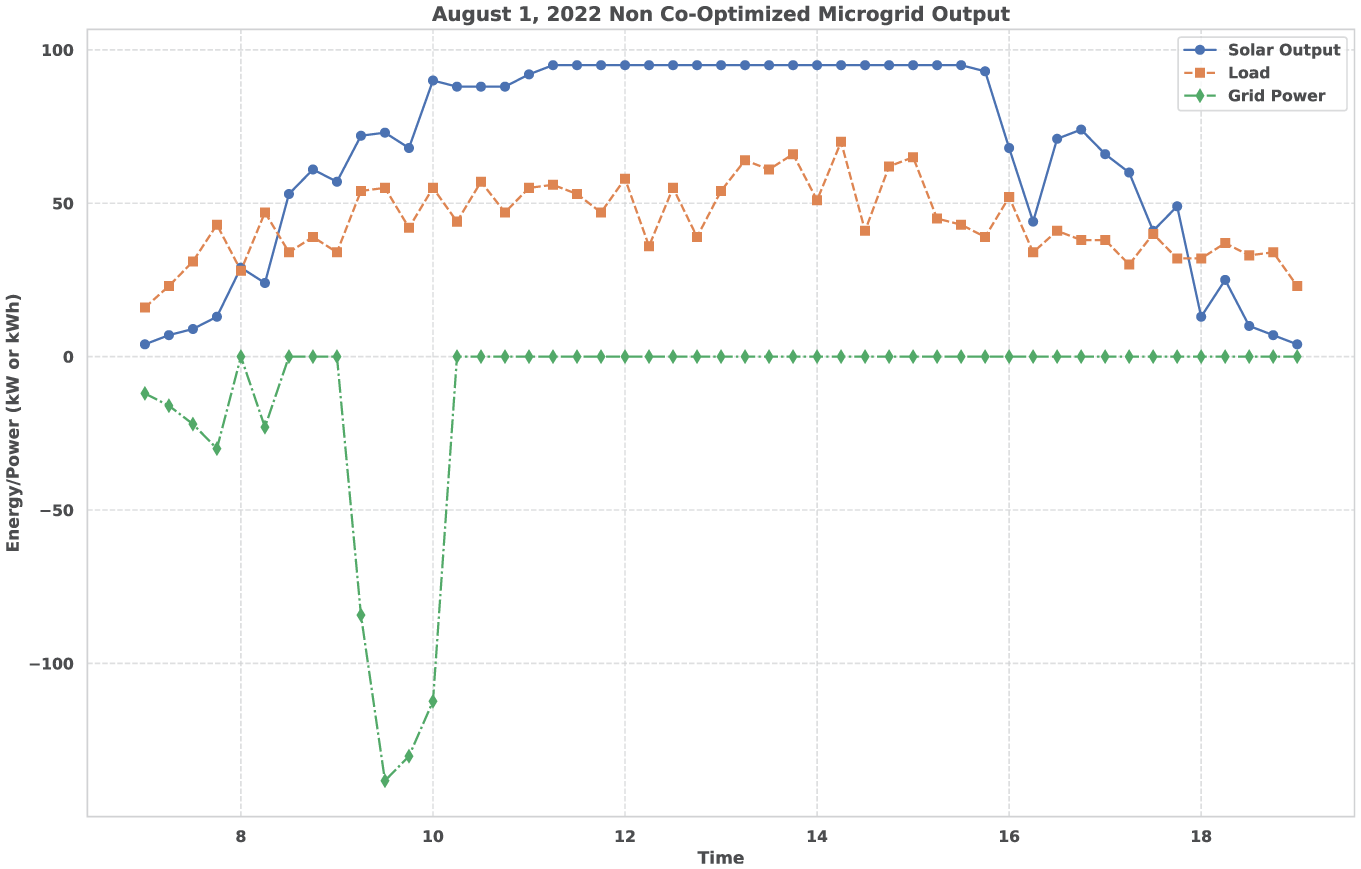
“Summer month” non-co-optimized microgrid power output and battery state.
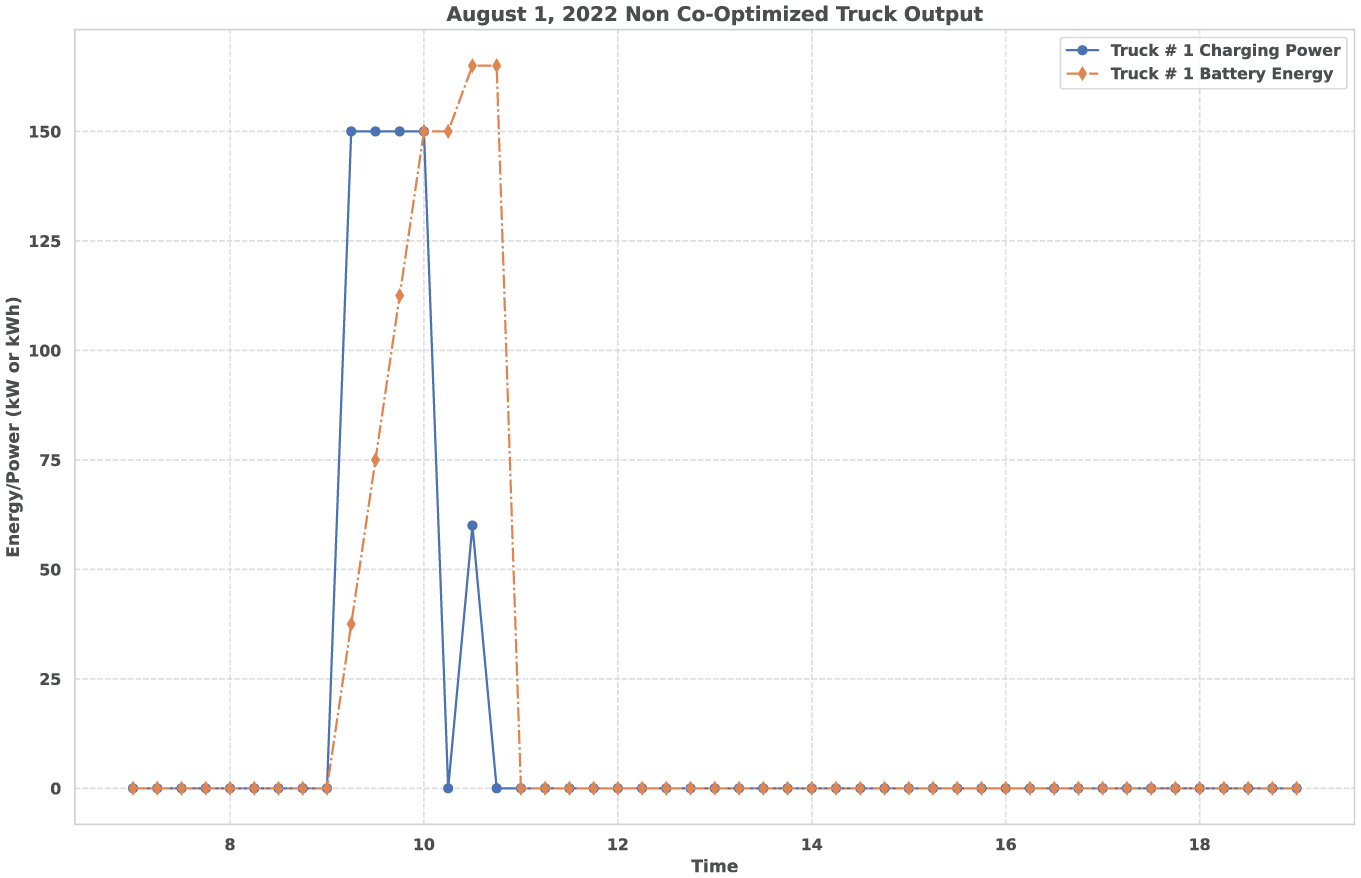
“Summer month” non-co-optimized truck power output and battery state.
Conclusions
The proposed truck scheduling algorithm significantly enhances the efficiency and flexibility of the microgrid system. Unlike traditional methods, where trucks charge until complete, regardless of the energy demand or cost, our algorithm determines the precise amount required for each truck, preventing unnecessary energy use. It also imposes constraints on the charging timeframes, ensuring that trucks charge only during predefined periods. This targeted approach allows for more effective usage of available energy resources and cost savings.
The microgrid algorithm is designed to adapt to the scheduling information provided by the truck algorithm. It ensures that each truck battery’s desired state of charge (SOC) is achieved within the specified timeframe. During these designated charging periods, the microgrid prioritizes truck batteries, which may temporarily cease microgrid battery charging. This prioritization ensures that the energy needs of the trucks are met without compromising the overall system stability.
In contrast, the baseline scenario for the microgrid operates without any coordinated input from the truck scheduling algorithm. Trucks arrive and charge based on their lowest cost preference, disregarding SOC constraints. The microgrid charges the trucks without prioritizing them over the microgrid battery, leading to suboptimal energy use and higher costs. This uncoordinated approach often results in inefficient energy distribution and missed opportunities for cost savings.
The implementation of the co-optimized scheduling algorithm demonstrates significant improvements over the baseline. With each optimization iteration, the scheduler refines the charging times to align with lower TOU periods, thereby reducing energy costs. Additionally, the algorithm effectively manages the energy demand, ensuring that a significant portion of the required energy is supplied by solar power. This reduces reliance on grid energy and leverages renewable energy sources, enhancing the sustainability of the microgrid system.
The results indicate that the co-optimized method achieves a more balanced energy distribution and has the potential for substantial cost savings. The dynamic adaptation of the microgrid to the truck scheduling algorithm allows for a synergistic relationship between the two systems, maximizing overall efficiency. This integrated approach represents a significant advance in microgrid and transportation energy management, offering a scalable solution for future smart grid applications.
This integrated approach has the potential to resolve key issues in EV charging management, providing a more reliable and efficient solution. The system can dynamically adapt to varying conditions by leveraging co-optimization, reducing demand costs, and optimizing energy usage. This method demonstrates significant potential for broader application in smart grid and transportation systems, paving the way for more sustainable and cost-effective energy management solutions. The results show the clear benefits of integrating scheduling algorithms with microgrid operations. This synergy leads to more efficient energy distribution, cost savings, and grid stability.
Future Work
Future research will focus on several key areas to enhance the microgrid energy allocation algorithm. First, we aim to extend the algorithm’s capability to handle a dynamic set of constraints. This involves developing an adaptable framework that can accommodate a variable number of trucks dispatched to the electric vehicle charging station (EVCS). Future models will incorporate operational costs in addition to the energy and transportation costs considered exclusively in this study.
In addition to this, we plan to introduce a prioritization algorithm to address non-optimal solutions. This enhancement will enable operators to choose which trucks to dispatch based on a set of prioritization criteria when energy availability is limited. The prioritization algorithm will consider factors such as the SOC of each truck’s battery, the urgency of their energy needs, and their operational schedules. By implementing this feature, the system will offer multiple methods for making dispatch decisions, thus optimizing the use of available energy and improving overall operational efficiency.
By addressing these areas, the proposed advancements aim to significantly improve the efficiency and adaptability of microgrid energy allocation systems, contributing to more sustainable and practical transportation energy management.
Footnotes
Acknowledgements
This study was funded partially by a grant from the National Center for Sustainable Transportation (NCST), supported by the U.S. Department of Transportation's University Transportation Centers Program. The contents of this paper reflect the views of the authors, who are responsible for the facts and the accuracy of the information presented herein. This document is disseminated in the interest of information exchange and does not necessarily reflect the official views or policies of the U.S. Government. The U.S. Government assumes no liability for the contents or use thereof.
This study was also partially supported by the SPEAKS program at the University of California, Riverside, under Grant DGE-2152258 from the National Science Foundation.
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Luis Fernando Enriquez-Contreras, Dongbo Peng, Matthew Barth and Kanok Boriboonsomsin; data collection: Luis Fernando Enriquez-Contreras, Dongbo Peng; analysis and interpretation of results: Luis Fernando Enriquez-Contreras, Dongbo Peng and Ruili Yao; draft manuscript preparation: Luis Fernando Enriquez-Contreras, Dongbo Peng, and Ruili Yao. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded partially by a grant from the National Center for Sustainable Transportation (NCST), supported by the U.S. Department of Transportation's University Transportation Centers Program. This study was also partially supported by the SPEAKS program at the University of California, Riverside, under Grant DGE-2152258 from the National Science Foundation.
The contents of this paper reflect the views of the authors, who are responsible for the facts and the accuracy of the information presented here. This document is disseminated in the interest of information exchange and does not necessarily reflect the official views or policies of the U.S. Government. The U.S. Government assumes no liability for the contents or use thereof.