
Abstract
Left-turn movements pose significant safety hazards and reduce the operational efficiency of signalized intersections. One effective strategy to mitigate these issues is to restrict conflicting left turns at strategic locations. However, determining the optimal locations for such restrictions in large urban networks is challenging, owing to the complexity of traffic dynamics and the large solution space. The aim in this work is to provide additional insight into the types of intersection most likely to provide a network-wide benefit if a left-turn restriction is applied. A two-stage methodology is proposed, where the first stage applies a bi-level optimization framework combining population-based incremental learning (PBIL) and the Aimsun micro-simulation platform to determine near-optimal left-turn restriction locations. The second stage introduces a binary logit model that is used to explain the traffic parameters influencing these decisions. When applied to the Pittsburgh traffic network, the PBIL algorithm demonstrated up to a 12% reduction in travel time under peak demand, without significantly increasing trip lengths. The logit model, trained on known demand scenarios, indicates that intersections with higher values of left-turning green ratio, flow ratio, and protected green ratio are less likely to benefit from left-turn restrictions. Furthermore, the model’s predictions for unknown demand levels can be used to identify locations of left-turn restrictions that are comparable to PBIL, concerning travel time improvements. This framework provides a data-driven approach for transportation agencies to determine optimal left-turn restriction locations, balancing operational efficiency and network performance.
Left-turning movements at intersections conflict with through and right-turning movements from the opposite direction, creating significant challenges for signal operations and intersection safety. At signalized intersections, conflicting left-turn movements are typically accommodated by either permitted or protected left-turn signal phases. When permitted phasing is used, left-turning vehicles must wait for gaps in oncoming traffic; this contributes to increased delay and increases the risk of angle crashes ( 1 ). Furthermore, queueing vehicles in dedicated left-turn lanes might spill back and impede the flow of other traffic ( 2 ). By contrast, the use of protected left-turn phases eliminates conflicts but reduces the green time available for other movements, lowering the overall throughput of the intersection (3, 4). Researchers have also proposed numerous alternative intersection designs to accommodate left-turning traffic more safely and efficiently (5–12). However, these treatments are expensive and cannot always be accommodated in dense urban networks, owing to the large spatial footprints required.
An alternative strategy to mitigate issues arising from conflicting left turns is to restrict vehicle movements at signalized intersections, specifically in dense urban street networks. Studies have shown that not only can prohibiting left turns in this setting improve the capacity and safety of signalized intersections, but it can also increase the trip completion rates in a transportation network (13–16). Despite the operational and safety benefits of restricting left turns, decision-making at the microscopic level has its challenges. Drivers may be required to travel additional distances, perhaps by making three right turns to achieve the equivalent of one left turn, and this can increase travel time and inconvenience. Additionally, banning left turns can divert traffic to other routes, potentially leading to increased congestion in areas that were previously less affected. Therefore, identifying the most optimal locations to restrict left turns in a network is critical.
Determining the optimal locations for treatments in a transportation network (i.e., at which locations to restrict left-turn movements) is classified as an NP-hard optimization problem ( 17 ). Additionally, restricting left-turn movements at one intersection alters the traffic flows at its neighboring intersections; therefore, these treatment decisions are interdependent. Some researchers have used simple analytical traffic models to analyze the effect of implementing left-turn restrictions; however, these models are unable to capture traffic dynamics, such as rerouting and queue spillback (18–22). To overcome this issue, researchers have also proposed using agent-based simulation techniques that enable dynamic traffic assignment to capture the true effect of these treatments (12, 23). However, the complexity of optimal location problems escalates significantly with the increase in the number of treatments or potential locations; for example, for each traffic pattern and level of demand, the decision to either restrict left turns or not in a network with N intersections has 2 N possible combinations that need to be analyzed to determine the globally optimal solution. To address this challenge, such heuristics as evolutionary algorithms provide a computationally efficient means of determining near-optimal solutions of problems with extremely large solution spaces, that is, identifying a near-optimal set of locations to restrict left-turning movement that results in shorter travel times (24–28). However, the drawback of using black-box algorithms for optimization is the lack of interpretability; they provide solutions without insights into the underlying reasons behind those solutions. This opacity makes it challenging for transportation agencies to understand which specific factors drive the decision to restrict left turns at particular intersections.
In light of the gaps in the existing literature, in this study, a two-stage methodology is used to identify the types of intersection for which restricting left turns is most beneficial in a transportation network. In the method, first left-turn restriction decisions in urban networks are optimized using a bi-level optimization framework; then a binary logit regression model is used to identify the traffic parameters at individual intersections most associated with positive network-wide outcomes when left turns are restricted. The bi-level optimization framework uses the population-based incremental learning (PBIL) algorithm at the upper level and the Aimsun micro-simulation platform at the lower level to identify near-optimal locations in a network where implementing left-turn movement restrictions results in improved travel times. The identified solutions are then used to train a binary logit regression model, which seeks to relate these decisions (i.e., whether left turns are banned at a particular location in the optimal solution) to traffic flow and signal timing information. The results provide greater transparency and should allow decision-makers to determine the key factors influencing left-turn restriction decisions and predict optimal locations for unknown scenarios. The proposed method was applied in a real network of downtown Pittsburgh, Pennsylvania, and robustly tested under different demand settings. The results reveal that selecting intersections based solely on their operating features—which can be readily measured in practice—can provide positive network-wide improvements, as opposed to running a full optimization algorithm in simulation. Overall, the key contribution of the paper is that the proposed framework provides data-driven guidelines, as opposed to inexplicable and computationally intensive simulations, that transportation engineers and planners can use to make informed decisions on whether or not to restrict left turns at a given intersection.
The remainder of this paper is structured as follows. The following section introduces the proposed two-stage optimization methodology. This is followed by a description of the simulation setup used to test the proposed methodology. Next, the results of the bi-level optimization, as well as the binary logit model, are compared. The final section highlights the findings and suggests directions for future work.
Method
This section describes the two-stage methodology that is proposed in this paper. This includes the bi-level optimization framework that generates near-optimal configurations as a starting point for known demand scenarios and the binary logit model that is applied to predict and justify optimal locations for implementing left-turn restrictions for unknown scenarios in a signalized urban traffic network. Figure 1 outlines the methodology.
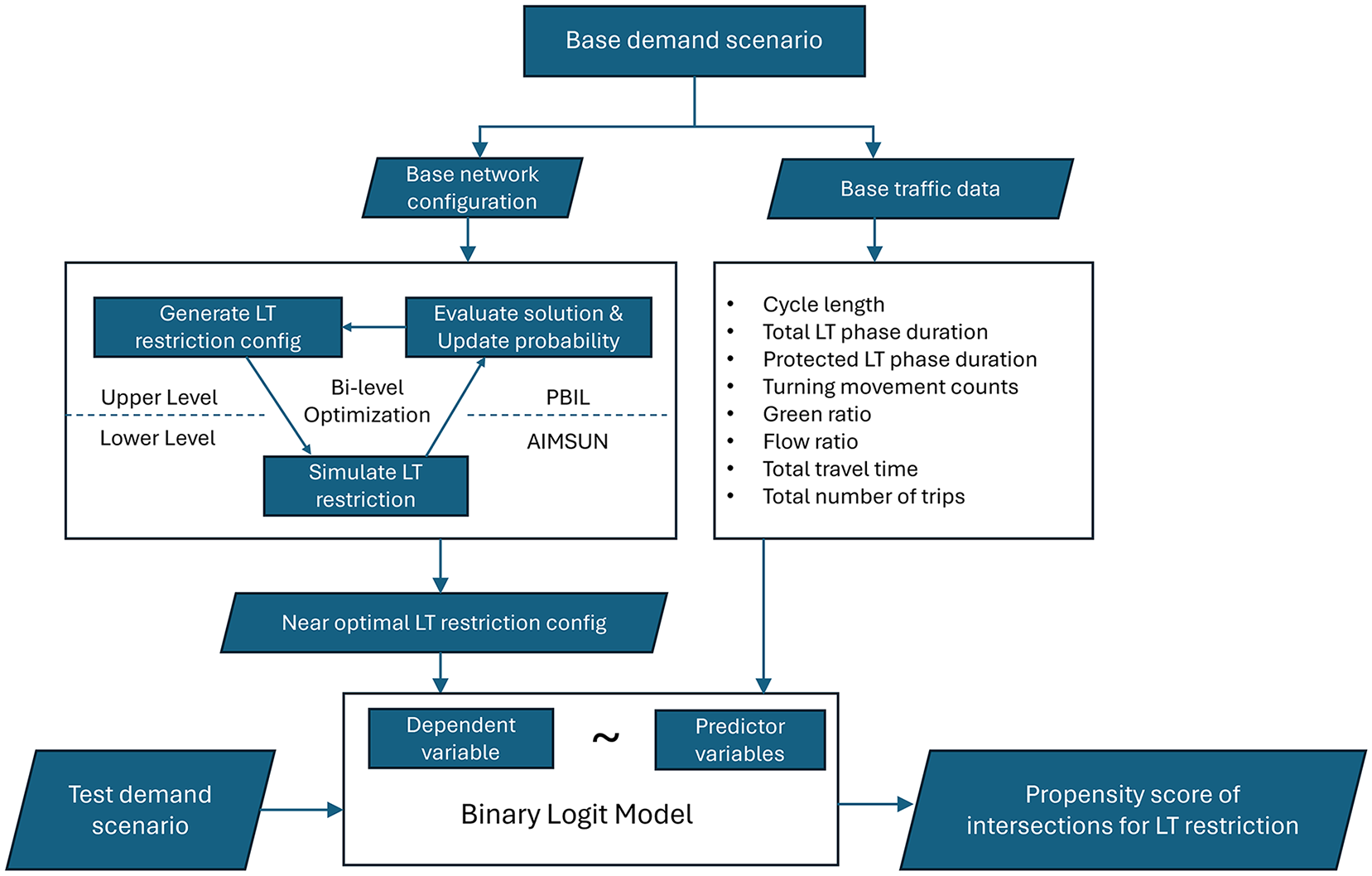
Methodology of left-turn restriction prediction model.
Bi-Level Optimization Framework
A bi-level optimization framework operates by dividing the optimization problem into two hierarchical levels: the upper level identifies decision variables, such as the configuration of traffic treatments to optimize overall network performance and the lower level evaluates the effectiveness of these configurations using detailed simulations or analytical models. This iterative process continues, with the upper level refining its decisions based on feedback from the lower level, until an optimal or near-optimal solution is reached.
Lower Level: Aimsun to Evaluate Effectiveness of Specific Left-Turn Restriction Configuration
Since the problem of identifying the optimal locations to restrict left turns does not have an exact solution, each configuration generated by the upper level is evaluated at the lower level. While static models, such as stochastic user equilibrium functions, have been used in existing studies to simulate the effect of transportation treatments on a network, they do not capture traffic dynamics when implementing transportation treatment solutions (19, 21, 22). In other studies, dynamic models, such as the link transmission model, or micro-simulation software, such as Aimsun, Vissim, or SUMO (29–33), have been employed to better model traffic dynamics and provide a detailed and realistic assessment of the effect of different treatment strategies. For this study, Aimsun was selected in the lower level for its ability to capture queue formation, spillback, and rerouting, and for ease of programming. For each generated configuration, the conflicting left-turn movements of selected intersections were identified and removed. Note left-turn movements on one-way streets that did not conflict with through or right-turn movements from the opposite direction were not removed. Next, any dedicated left-turn lanes were modified to allow through movements. Finally, the signal timing was adjusted without altering the cycle length by re-allocating green time for protected left-turn phases toward the through-right movement in the same direction. Therefore, the total duration of green time allocated to allow for movements in either the north–south or east–west direction remained unchanged.
Upper Level: PBIL to Identify Potential Left-Turn Restriction Configurations
The upper level of a bi-level optimization framework employs heuristic methods (e.g., an evolutionary algorithm) to generate random configurations of a treatment, which it continues to update until it converges toward an optimal solution. However, most genetic algorithms do not capture the interdependency between solutions that exist in transportation network treatment problems. To address this, the PBIL algorithm is employed; this is an evolutionary algorithm that combines elements of genetic algorithms with learning processes and considers solution dependencies ( 34 ). PBIL has been successfully applied in network level transportation treatment problems (24–26, 35–37). Key parameter definitions of the PBIL algorithm and values used in this study are given in Table 1.
Key Parameters of Population-Based Incremental Learning Algorithm

Note: NA = not available.
The baseline scenario is the existing traffic signal timing plan for a given scenario (in this case, the p.m. peak) with no turn restrictions applied at any of the signalized intersections. The PBIL algorithm is initialized by generating a population of configurations that represent a subset of signalized intersections at which to implement left-turn restrictions. These configurations are generated using an initial probability vector,
Each configuration is passed into the lower level where its performance is simulated in Aimsun, and the fitness of each configuration is determined based on the total travel time resulting from the implementation of left-turn restrictions at the selected intersections. Using the fitness score, the best and worst configurations of generation g are identified and the probability vector of generation

Conversely, the negative learning operation decreases the probabilities of the intersections present only in the worst solution, so they have a lower likelihood of being selected in the next generation:

Note, however, that probabilities of intersections present in both the best and worst solutions are not altered.
The mutation operation mutates the probabilities of randomly selected intersections by the mutation rate using the following formula, to increase the exploration within the solution space:

The algorithm finally terminates if the algorithm converges according to a predefined threshold (e.g., the fitness of the generated solutions no longer improves) or if the maximum number of generations has been reached; the speed of convergence can be changed by adjusting the learning rates. Since the objective of the bi-level optimization step of this study is to approximate a near-optimal solution, the latter termination criterion was selected. The output of the algorithm is the left-turn restricted network configuration that corresponds to the shortest observed travel time.
Binary Logit Prediction Model
While the bi-level optimization framework effectively generates optimal configurations for left-turn restriction locations in a traffic network, a significant drawback is its lack of interpretability. The framework achieves optimal solutions by simulating numerous random configurations until a near-optimal configuration is identified. However, this process does not provide insights into the underlying factors that drive the selection of specific intersections for left-turn restrictions. As a result, decision-makers are left with optimal solutions that lack the necessary explanatory context, making it difficult to justify and understand the decisions made. To address this limitation, the optimal configuration generated by the bi-level optimization framework is utilized as an input to a binary logit model, where it is treated as the dependent variable, and various traffic data and parameters related to left-turn movements at intersections serve as the independent variables. By training the model with the correct parameters, it learns which factors are most significant in explaining the selection of left-turn restrictions at intersections.
Model Inputs
The dependent variable in the binary logit model indicates the selection of left-turn restrictions at a particular intersection. This binary variable, encoded as 1 or 0, represents the presence or absence of a left-turn restriction at each intersection of the network, as determined by the best configuration output from the bi-level optimization framework. To understand why a particular intersection benefits from left-turn restriction, a variety of traffic flow and signal timing parameters from training demand scenarios are extracted and used as predictor variables to train the binary logit model. These include intersection-level data, such as the cycle length and the total intersection throughput from turning movement counts. Additionally, for each conflicting left-turn movement at an intersection, the following parameters were extracted:
duration of left-turn phase,
green ratio of left-turn phase,
duration of protected left-turn phase,
green ratio of protected left-turn phase,
left-turn volume,
left-turn flow ratio.
Since an intersection may accommodate several conflicting left-turn movements, the parameters were aggregated for each intersection by taking the sum, mean, minimum, and maximum of the parameters from all conflicting left-turn movements. The final variables included in the model were the total number of trips generated and the total travel time of each simulated demand, to allow the model to differentiate between demand scenarios.
Model Formulation
The probability function under the binary logit formulation for predicting the propensity of an intersection receiving a left-turn restriction can be expressed as

where

The estimated coefficients β describe the relationship between each traffic parameter and the likelihood of a left-turn restriction being applied to an intersection. Positive coefficients indicate that higher values of the parameter increase the likelihood of a left-turn restriction, while negative coefficients suggest the opposite.
Simulation Setup
The proposed methodology was tested on the traffic network of downtown Pittsburgh, Pennsylvania, which consists of peripheral collectors (e.g., Fort Duquesne Boulevard, Liberty Avenue, Boulevard of the Allies, Fort Pitt Boulevard, running in the east–west direction, and Grant Street, in the north–south direction) and local streets in the central region, forming a triangular grid. Turning movement counts at each intersection, obtained from Synchro, were used to calibrate an origin–destination (OD) matrix with 58 origin and destination nodes that accurately represented the distribution of trips throughout the network in an evening peak scenario. The total number of trips in the calibrated p.m. peak demand scenario (referred to here as D-100) averaged 21,150 across several random seeds. Additionally, three lower demand scenarios (referred to in this study as D-94, D-87, and D-80) were simulated, with averages of 19,800, 18,400, and 17,000 trips, respectively, generated across four random seeds. Since demand data were not available for other times of the day, the latter scenarios were used to simulate three different traffic patterns, replicating periods building up to and cooling down from the p.m. peak. Furthermore, each random seed introduces stochasticity in the vehicle arrival patterns while maintaining consistency with the input demand levels and OD matrices. Simulating four random seeds provides additional data to improve the statistical significance of the model while balancing computational resources. The binary logit model was trained twice, to predict the propensity of restricting left turns for D-94 and D-87. In each case, one demand level was reserved as the testing dataset and the model was trained using the outcomes of the other three training demands. This allowed the binary logit to be tested on unseen demand patterns within the network. Note that D-100 and D-80 were not used for testing as they represent the upper and lower bounds of the demand levels considered.
The signal timing was imported from an optimized Synchro p.m. peak signal timing plan, which includes real cycle lengths, phase splits, and offsets of each signalized intersection in downtown Pittsburgh. The simulated network consists of a total of 76 signalized intersections, of which 39 intersections were selected as candidates for the implementation of left-turn restrictions, owing to their centrality in the network and the potential effect of the restriction decisions on overall congestion reduction (Figure 2). Of the intersections not considered as candidates for left-turn restriction, 7 were one-way streets where the left-turning movements did not have conflicting movements from the opposite direction and 30 were located at the periphery of the network or connected to major OD nodes. Restricting left-turning movements at these peripheral intersections might significantly increase the traveled distance so they were also excluded from left-turn restriction considerations.

Map of simulated downtown Pittsburgh.
Results
This section describes the outcome of implementing left-turn restrictions in the network, based on the solutions generated from the PBIL algorithm as well as the training of the binary logit model that is later used to determine the parameters influencing decisions to restrict left turns. Finally, the predictive performance of the model is investigated for unknown scenarios.
Effect of Left-Turn Restriction at Individual Intersections
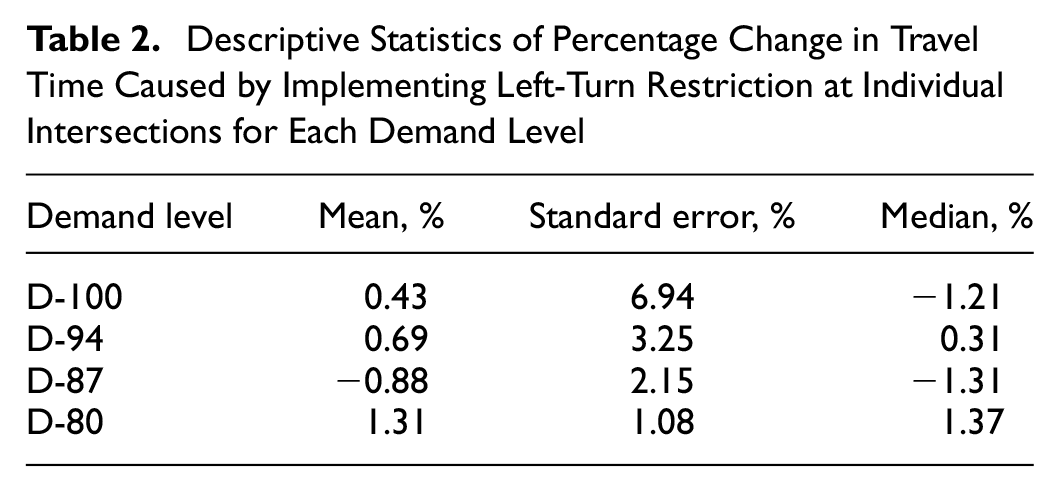
To demonstrate the variability in performance on restricting left turns at individual intersections, Figure 3 shows the average percentage change in the total travel time when left turns were restricted at each intersection across all demand levels for the different replications. The average running times of single simulations of D-100, D-94, D-87, and D-80 were approximately 95.51, 75.63, 69.65, and 63.26 s, respectively. First, it is evident that the peak demand scenario exhibits a larger variability in travel times, from a maximum improvement (reduction) of nearly 9% to an increase in travel time of approximately 20% over the base scenario. As demand decreases (D-94, D-87, D-80), this variability in travel time diminishes, suggesting that the effect of left-turn restrictions is significantly influenced by traffic volume. Key parameters for the percentage change in travel time observed over the base for each scenario are given in Table 2.
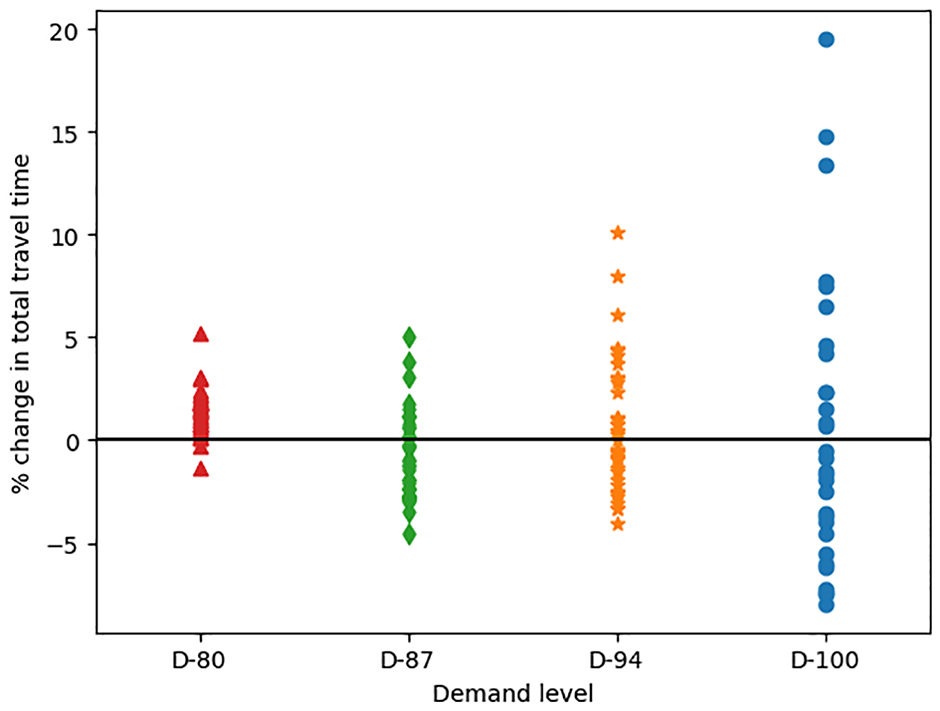
Percentage change in total travel time over base demand resulting from the implementation of left-turn restriction at individual intersections.
Descriptive Statistics of Percentage Change in Travel Time Caused by Implementing Left-Turn Restriction at Individual Intersections for Each Demand Level
Optimal Left-Turn Restriction Solutions Using PBIL
PBIL Convergence
As a heuristic method, PBIL cannot guarantee an optimal solution. Instead, the goal is to provide a configuration that significantly improves performance (i.e., travel time) without having to test all possible configurations. Note that there are 239 = 549,755,813,888 possible configurations to be tested in the Pittsburgh network. However, the PBIL algorithm simulates only 400 configurations (20 configurations in each of the 20 generations of the algorithm) to obtain well-performing solutions that will serve as inputs for the binary logit model.
The blue, orange, green, and red line plots in Figure 4 illustrate the convergence trends of the PBIL algorithm for each of the demands, measured as the percentage improvement in total travel time over the base network. It is evident that, as the algorithm progresses, better solutions (i.e., subsets of intersections to restrict left turns) are discovered, and all demand levels exhibit a reduction in travel time. Specifically, D-100, D-94, D-87, and D-80 achieve an improvement of approximately 12.5%, 9.5%, 8.4%, and 4.4%, respectively, indicating that left-turn restriction is more effective under higher demands. Additionally, most scenarios demonstrate significant improvements early in the iterations and stabilize quickly. For example, D-100 reaches 94% of the maximum travel time improvements in the first two generations while D-80 reaches 97% in the first four generations. Despite the significant improvement in travel time, the models do not appear to have fully converged, as all of the scenarios continue to demonstrate improvements in the last few generations. Nonetheless, the best-performing solutions comprising the locations of intersections to restrict left turns obtained using PBIL are identified and used to train the logit model.
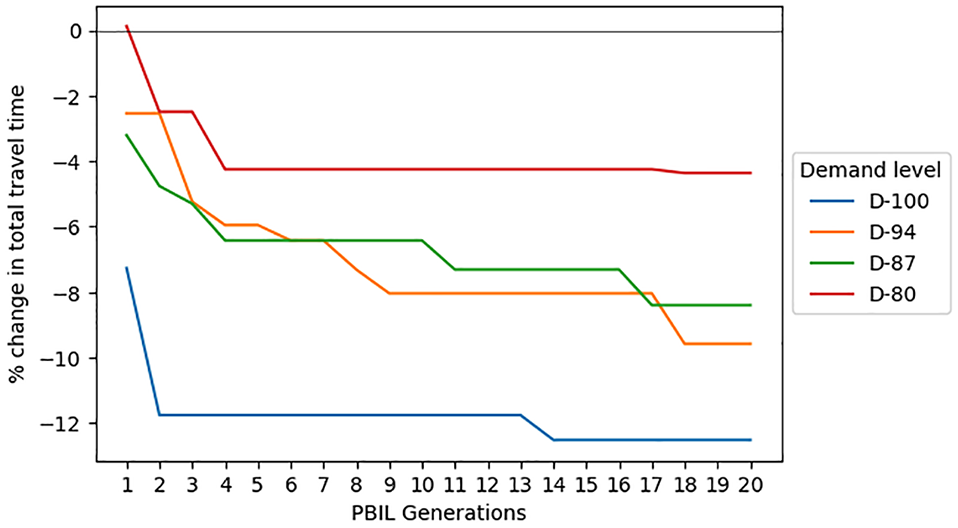
Convergence of population-based incremental learning (PBIL) for each demand level.
Locations of Left-Turn Restrictions
The locations of left-turn restrictions present in the top five configurations generated by the PBIL algorithm are shown in Figure 5 for each of the demand levels. The intensity of the marker at each intersection indicates how many times that intersection appears in the best configurations for that demand. Owing to the inherent randomness of PBIL and the interdependence of the solutions, the best configurations do not always contain the same set of intersections. However, significant overlap can be seen across all demands, with some intersections selected several times at all demand levels to receive a left-turn restriction. At D-100 (Figure 5a), there is lower variability, with a few intersections repeatedly selected; most of these are concentrated in the central grid region. In contrast, the best solutions for lower demand levels (Figure 5, b–d) have more intersections where left turns are restricted. These intersections are not limited to the central region, rather intersections on arterials, such as Liberty Avenue and Grant Street, benefit more from prohibiting left turns.
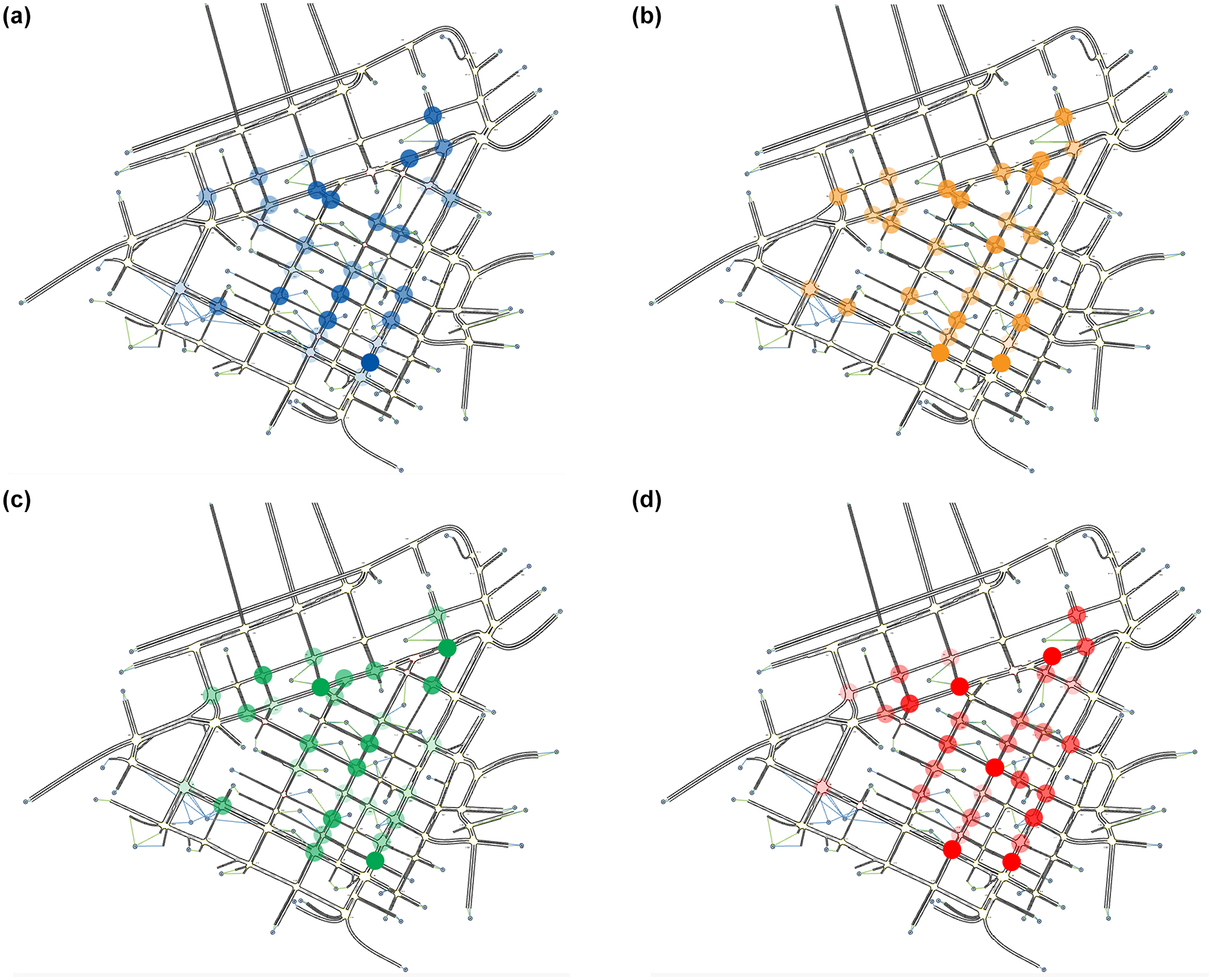
Locations of left-turn restriction decisions from top five configurations generated using population-based incremental learning: (a) D-100; (b) D-94; (c) D-87; (d) D-80.
Effect on Travel Time Distributions
The objective function of the PBIL algorithm was to determine the set of intersections where restricting left turns would minimize the total travel time in the network. Figure 6 shows the distribution of the probability density function of the travel time of individual trips for the base scenario (in black) and the best configuration of the PBIL algorithm for all four demand levels. The results reveal that PBIL significantly improves not only the total travel times but also the individual trip durations. Specifically, 9652 of the 18,596 individual trips in D-87 saw an average reduction in travel time of 91 s, with a median decrease of 73 s and a maximum reduction of 867 s. Conversely, the remaining 7126 trips took an average of 65 s longer, with a median increase of 50 s. Notably, only one trip was recorded with an increase exceeding 1000 s. Nevertheless, the total travel time in the network is reduced by 116.2 vehicle hours; meaning that each driver, on average, experiences a reduction of 22.5 s per trip. For each scenario, the distribution of travel times in the base simulation is skewed to the right, whereas the PBIL best configurations have taller peaks and more uniform distributions. Therefore, there is a higher percentage of shorter trips as a result of the left-turn restrictions.
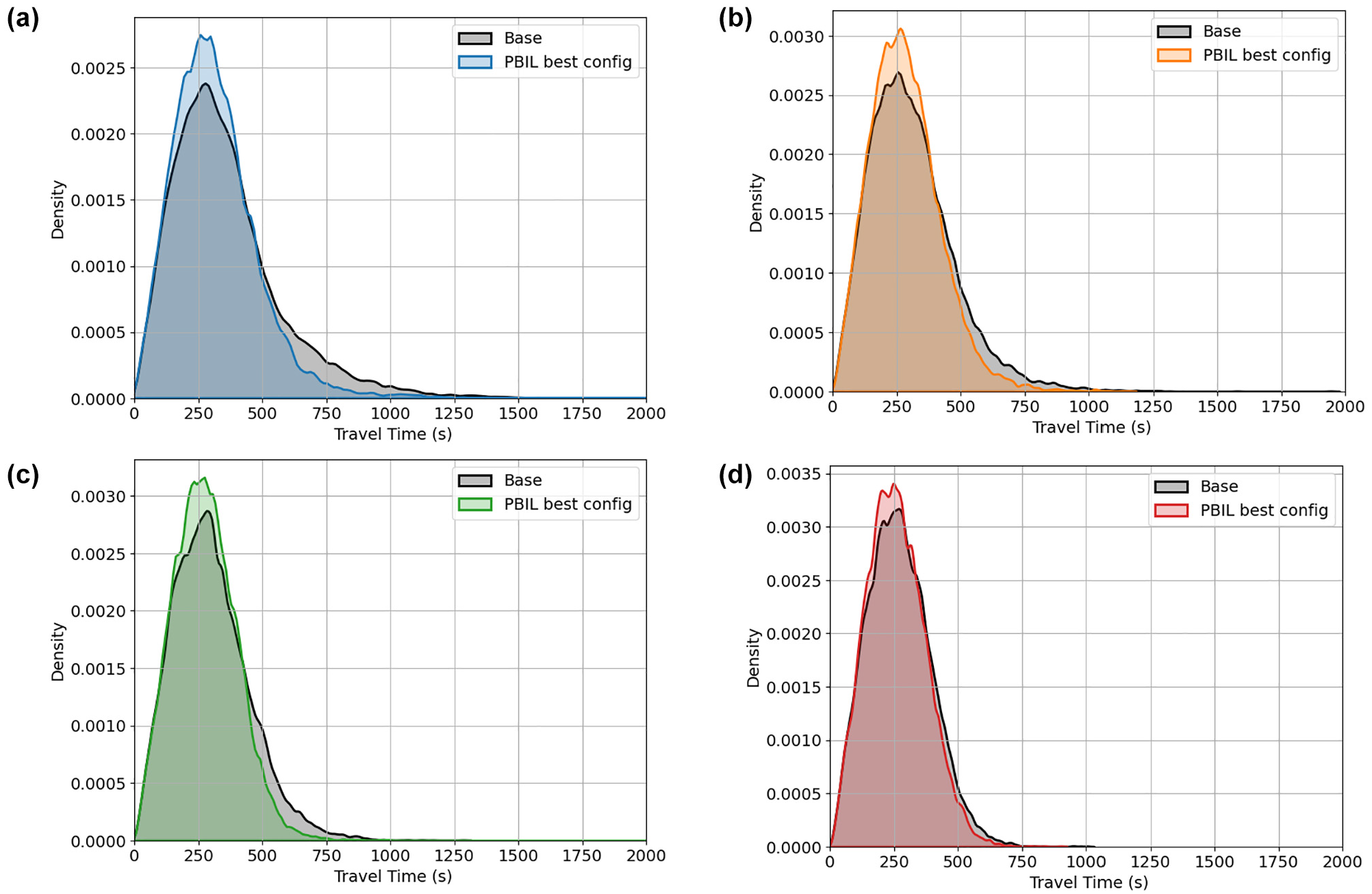
Probability density function of trip durations: (a) D-100; (b) D-94; (c) D-87; (d) D-80.
Effect on Traveled Distance Distribution
Intuitively, the restriction of left turns in a traffic network is expected to result in increased travel distances, as drivers might need to make additional turns to reach their destinations. However, the best solutions generated by the PBIL algorithm demonstrate a negligible increase in the total traveled distances over the base simulation, as is evident from the distribution of individual trip lengths (Figure 7). Considerable overlap can be seen between the base scenario and the PBIL best configurations, as the increase in the total distance traveled ranges between only 0.4% and 0.8% across the different demand levels. In scenario D-87, out of the 18,596 simulated trips, 8263 trips were longer than the base, averaging an additional 390 ft, with a median value of 172 ft and a maximum increase of 4492 ft. The remaining trips saw a reduction in travel distance. This is caused by driver behavior and the tendency to reroute under congested environments, either using navigation information or from personal experiences. Aimsun’s dynamic traffic assignment settings mimic this rerouting behavior of drivers, and vehicle paths are adjusted based on real-time traffic conditions. Under the base scenario when the network is more congested, the shortest available paths might not be the most optimal; therefore, drivers reroute and travel additional distances to reach their destinations. However, restricting left turns and allocating green time to serve the through-right movement phases reduces the lost time and increases the intersection throughput. As a result, more efficient paths may be available that are not significantly longer than that of the base scenario.
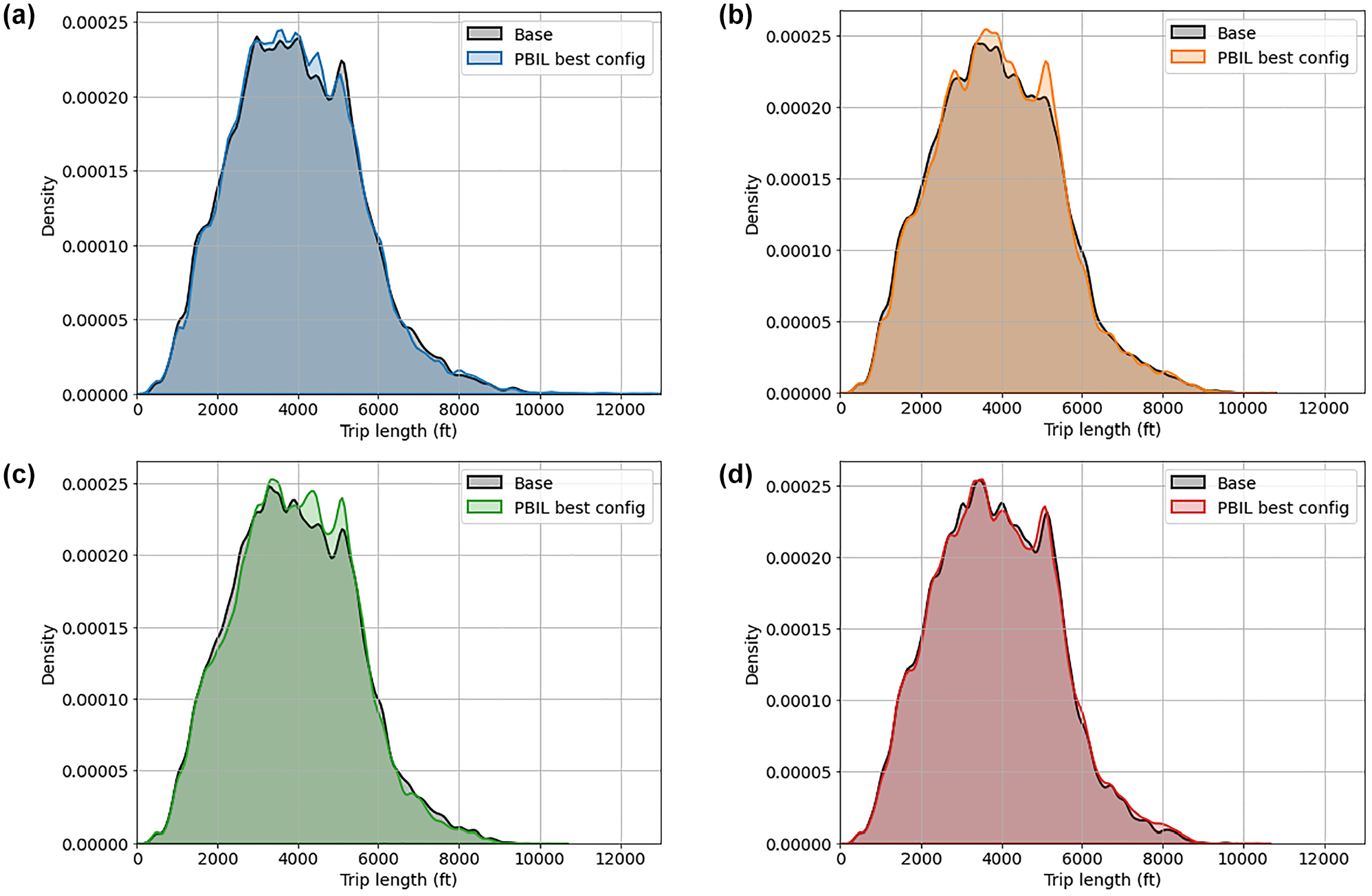
Probability density function of trip lengths: (a) D-100; (b) D-94; (c) D-87; (d) D-80.
Training and Predictive Performance of Binary Logit Model
Model Training
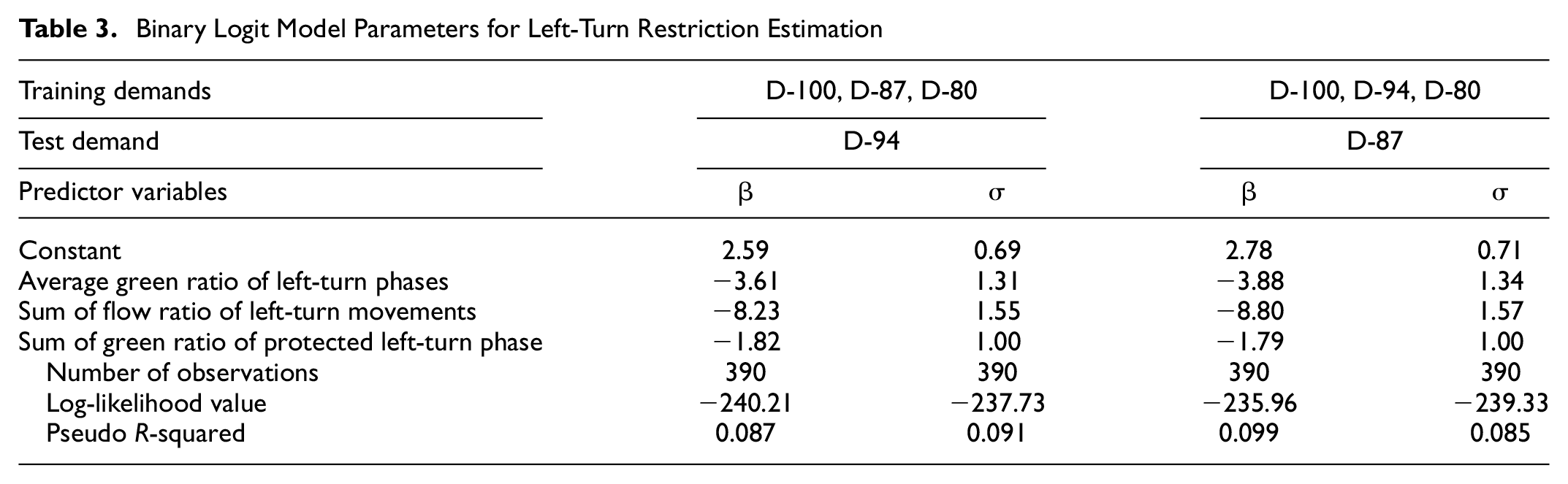
While a total of four different demand scenarios were simulated in this study, the binary logit models were trained using signal timing information, traffic flow data, and the locations of the intersections to implement left-turn restriction from any three of the known demands, while the remaining demand was held out to test the logit model’s performance. Of the 28 parameters available for inclusion in the logit model, three were identified that best influence the likelihood of restricting left turns: average green ratio for left-turn phases, sum of flow ratio for left-turn movements, and sum of green ratio for protected left-turn phases. These key parameters were selected through a combination of recursive feature selection methods and by applying engineering judgment. Table 3 shows the two models that were developed for D-94 and D-87, respectively, using known data from their complementary sets of demands. It is to be noted that the coefficients of all three parameters are negative, suggesting that intersections with higher values of these parameters were less likely to have left turns restricted in the best-performing configuration. All three are associated with higher left-turn volumes; this reasonably suggests that intersections with the highest left-turn activity are most likely to experience negative effects of left-turn restrictions. Intersections with protected left-turn phases are particularly less likely to have left turns restricted. The correlation matrix in Figure 8 shows that none of the selected variables is highly correlated.
Binary Logit Model Parameters for Left-Turn Restriction Estimation
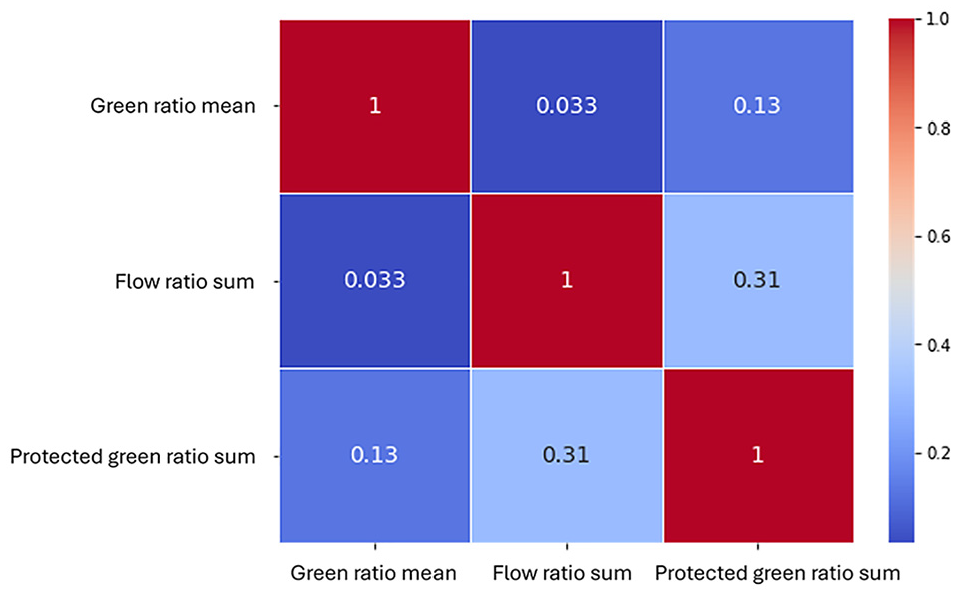
Correlation matrix of selected predictor variables.
Performance Evaluation of Prediction Model
To assess the effectiveness of the trained binary logit model, a propensity score indicating the likelihood of an imposed left-turn restriction was computed for each intersection using the average green ratio of left-turn phases, the sum of the flow ratio of left-turn movements, and the sum of the green ratio of protected left-turn phases from the respective base simulations in the model. These propensity scores were then used to rank each intersection’s eligibility for the implementation of left-turn restrictions; that is, to identify those intersections for which it might be more beneficial to restrict left turns to reduce travel times. For each of the D-87 and D-94 demand scenarios, intersections were sequentially selected for left-turn restrictions in a descending order of propensity scores (i.e., starting with the highest propensity score and adding the next highest) and the total travel time was computed using Aimsun. The orange and green solid line plots in Figure 9 illustrate the performance of these configurations for a given number of intersections with left turns restricted. The best solutions obtained from the PBIL algorithm are also shown using dashed horizontal lines for each demand scenario.
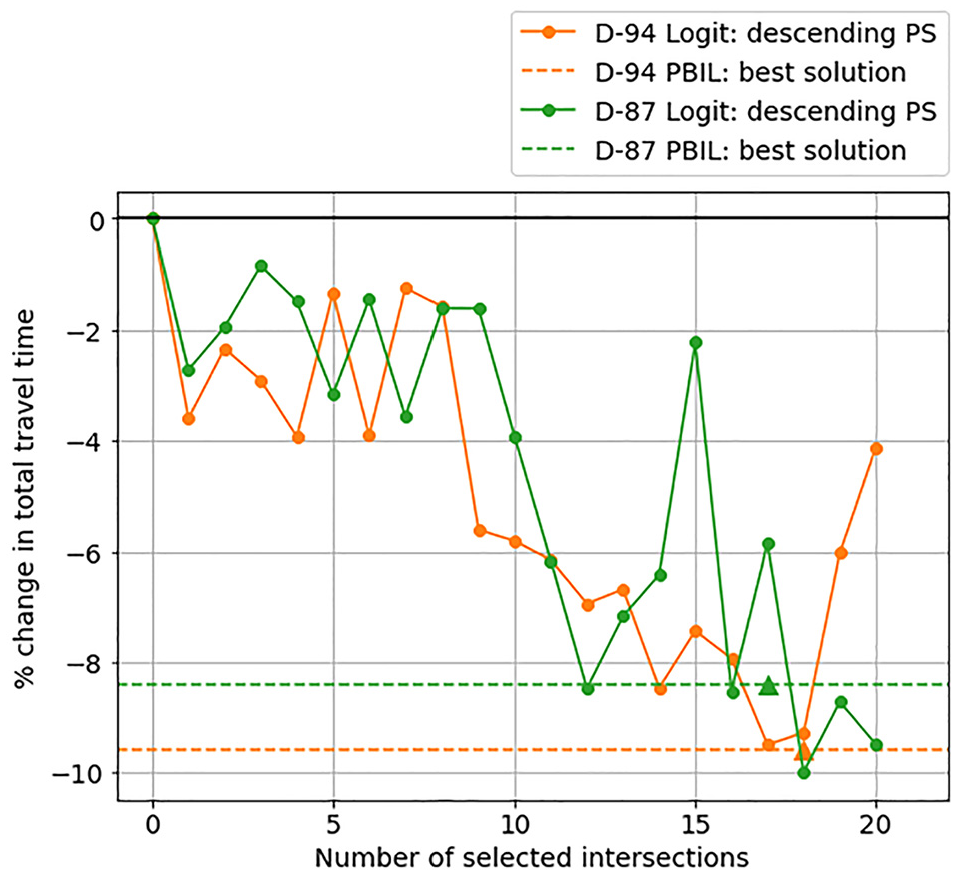
Effect of sequentially implementing left-turn restrictions at intersections by descending order of propensity score.
The results shown in Figure 9 reveal that the trained logit model to select intersections for left-turn restrictions provides remarkably good results that are comparable to—and sometimes surpass—those obtained from the PBIL algorithm applied directly to the demand scenarios. For example, the PBIL algorithm applied to scenario D-87 was able to find a solution that restricts left turns at 17 intersections and results in an improvement in travel time by 8.4%. However, an improvement of 8.47% was achieved when left turns were restricted at the 11 intersections with the highest propensity scores, and, despite fluctuations, a maximum improvement of 9.98% was achieved when left turns were prohibited at the top 18 intersections. Similarly, the best configuration generated using the logit model for scenario D-94 comprises 17 intersections and results in similar improvements to those in the best solution from PBIL. Beyond this configuration, however, the total travel time in the network begins to increase as more intersections are added.
The proposed logit model can also help identify at which intersections not to implement left-turn restrictions. Figure 10 presents the results of sequentially restricting left turns in ascending order of propensity scores (i.e., starting by restricting left turns at the worst potential location corresponding to the lowest propensity score and sequentially adding additional intersections). The intersections being added are those with a higher average green ratio, sum of flow ratio, and sum of protected green ratio of conflicting left-turning traffic. As left turns are restricted at more of these suboptimal intersections, there is a noticeable increase in travel time. Beyond 12 intersections, scenario D-94 experiences such heavy congestion that the simulated network gridlocks. This highlights the model’s ability to accurately rank intersections based on their suitability for left-turn restrictions.
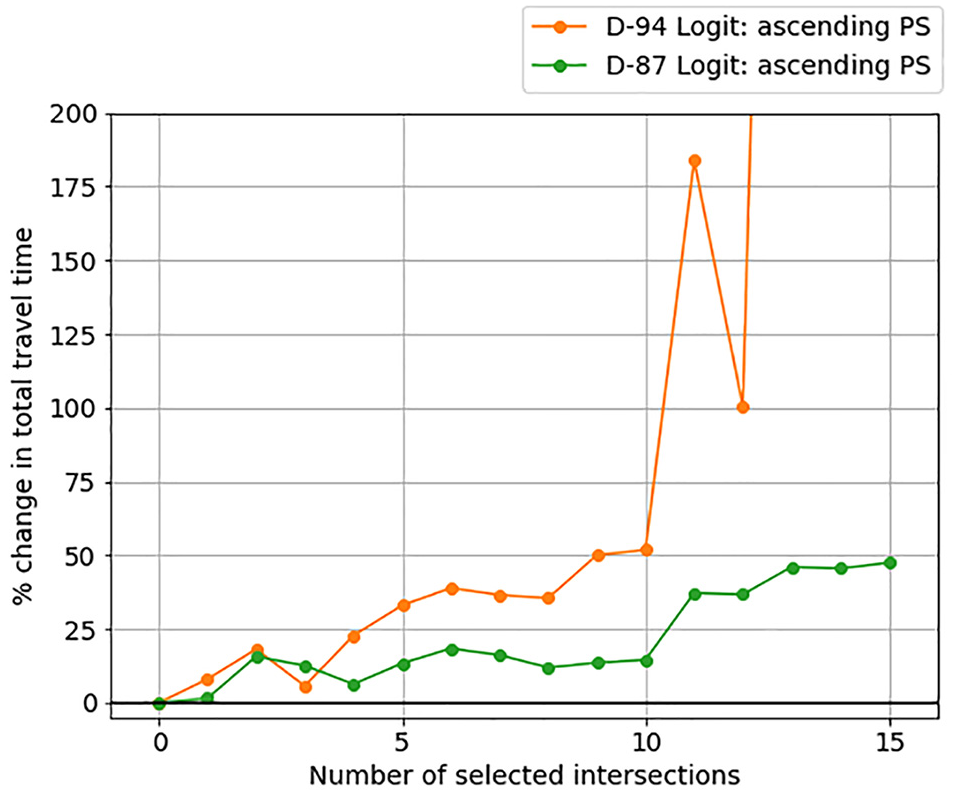
Effect of sequentially implementing left-turn restrictions at intersections by ascending order of propensity scores.
To further understand the effect of restricting left turns based on propensity scores, Figure 11 shows the distribution of individual trip durations and trip lengths for scenario D-87. The result of the base simulation without left-turn restrictions is shown in black, while the performance of best configuration predicted by the logit model with the top 18 intersections is denoted in green, and the configuration comprising 5 intersections with the least propensity scores is shown in red. The results indicate that the logit model’s best configuration significantly reduces the individual travel times, compared with the base scenario. Specifically, 10,076 trips have improved travel times, with an average reduction of 92 s, a median of 73 s, and a maximum reduction of 926 s. The travel time distribution is also narrower, indicating that a larger percentage of trips are quicker. In contrast, the bottom-5 configuration results in a distribution similar to the base scenario but more skewed to the right. Concerning trip lengths, the best configuration from the logit model results in an increase in trip length for 7268 of the 18,596 trips, by an average of 342 ft, with a median value of 118 ft and a maximum of 5566 ft, while the bottom-5 configuration results in 8981 trips with longer travel distances, by an average of 502 ft, with a median value of 273 ft and a maximum of 6640 ft. Overall, the distribution suggests that trip lengths do not differ significantly from the base scenario for either configuration, indicating that rerouting is minimal despite the left-turn restrictions. This suggests that drivers can seek out efficient travel paths even with left-turn restrictions.
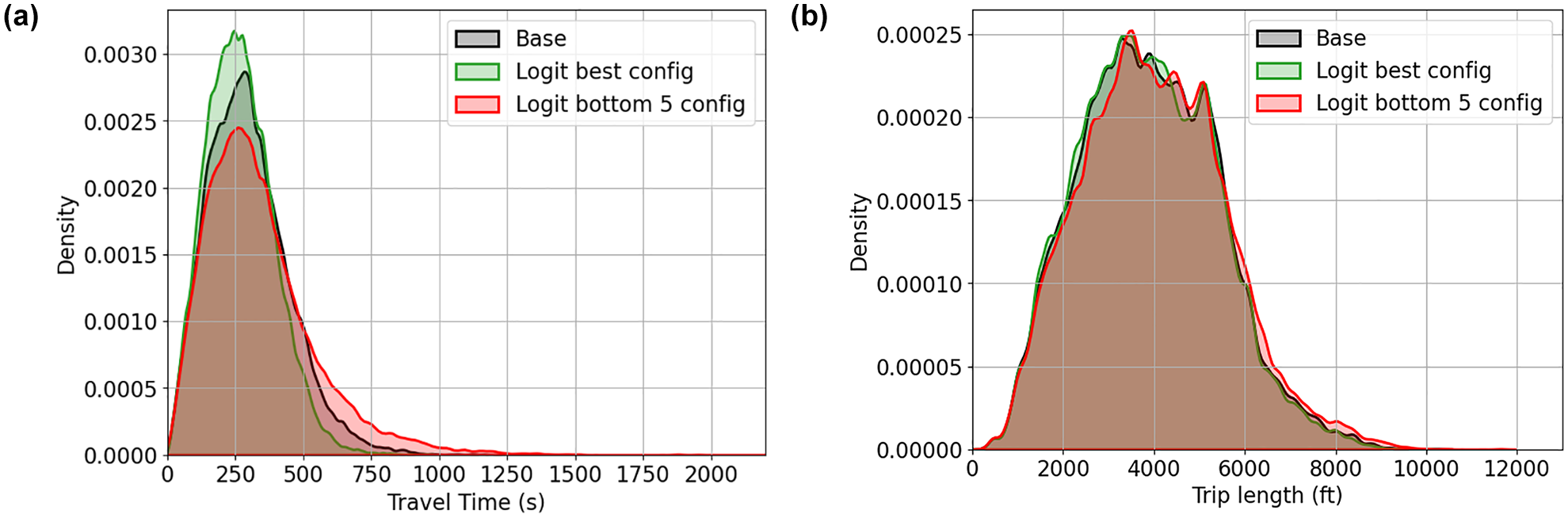
Probability density function: (a) trip durations; (b) trip lengths.
The locations of the top 18 selected intersections and the bottom 5 intersections of the logit model for D-87 are shown on a map in Figure 12 using green and red markers, respectively, where the intensity of the markers indicate their propensity scores, that is, a darker color indicates a higher propensity to receive left-turn restriction and vice versa. Compared with Figure 5c, which demonstrated the top locations to implement left-turn restrictions using PBIL, the binary logit model selects fewer intersections along Liberty Avenue. However, both figures show a concentration of intersections in the central grid region and typically comprise a series of two or three adjacent intersections in the north–south or east–west direction. This is probably because these intersections have similar levels of left-turning demand and are programmed with similar signal timing parameters.

Locations of left-turn restrictions in best configuration of binary logit model, and in configuration comprising bottom five intersections of binary logit model for D-87.
Robustness of Prediction Model for Practical Implementation
Although the propensity scores of intersections present a guide for agencies in selecting intersections for left-turn restrictions, some intersections might have unobserved characteristics that are not reflected in the model; turn restrictions might not be applicable to those intersections. Further, agencies might have other priorities for determining where to restrict left-turn movements. Thus, this section demonstrates the effect of restricting left turns at a random number of intersections selected from those with the highest (or lowest) propensity scores obtained from the logit model, using D-87 as an example. Specifically, random subsets of intersections were picked several times from the top 15, top 20, bottom 15, and bottom 20 propensity scores. The percentage changes in travel time over the base scenario for configurations comprising left-turn restrictions at 5 and 10 intersections are shown in Figure 13, a and b , respectively, where the blue and red lines show configurations picked from the top and the lower end, respectively. The shaded area around each line indicates a variability by one standard error across 10 random configurations. The findings suggest that configurations generated from the top 15 and top 20 propensity scores yield consistent improvements with low variability and that higher improvements are achievable by restricting left turns at 10 intersections, as opposed to 5. As expected, random configurations generated from intersections with the least propensity scores generally lead to congestion in parts of the network and result in an increase in total travel time and have a higher variability. Therefore, the prediction model remains robust for practical implementation by agencies, ensuring significant improvements, while accounting for the potential exclusion of certain intersections because of practical considerations.
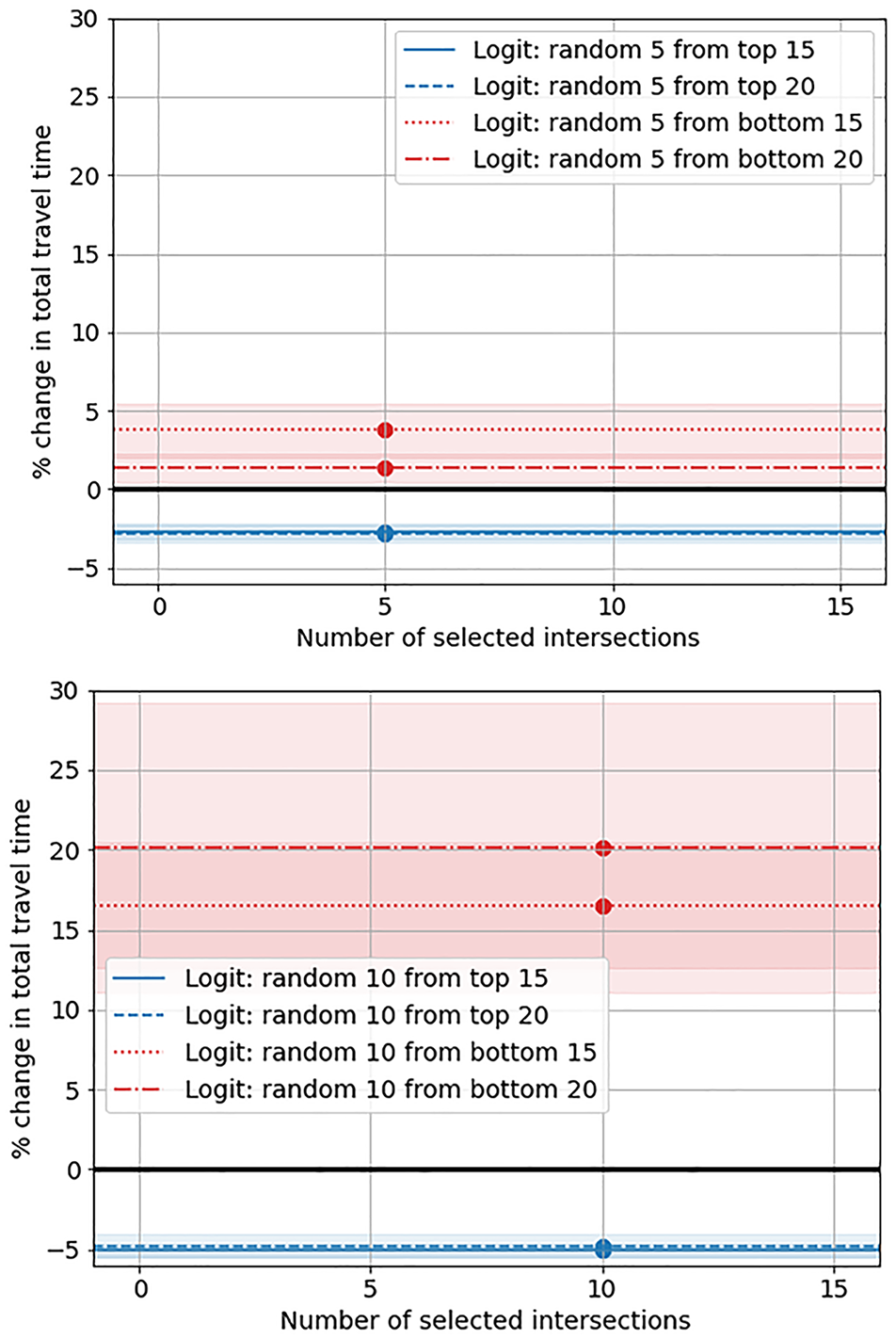
Effect of randomly implementing left-turn restrictions at intersections from top and bottom subsets by propensity scores.
Conclusion
This paper presents a data-driven methodology to identify the contributing factors behind restricting left turns in an urban network to improve traffic flow and mitigate congestion in real urban settings. The two-stage methodology consists of a bi-level optimization framework that is used to sample the solution space randomly and identify near-optimal locations to prohibit left turns with the objective of reducing total travel time. These near-optimal locations are then used to train a binary logit model where traffic flow and signal timing variables pertaining to left-turning movements at each intersection are used to determine which parameters influence left-turn restriction decisions. The trained model was then used to make predictions for unknown scenarios; travel time in the network significantly improved as left turns were sequentially restricted at intersections, based on the propensity scores from the binary logit model.
The results show that the implementation of left-turn restrictions at individual intersections has mixed effects; some intersections exhibit improved mobility while prohibiting left turns indiscriminately might result in increased congestion. However, the PBIL algorithm efficiently identifies left-turn restriction configurations that significantly reduce travel time across all demand levels without increasing trip distances. Using the p.m. peak in downtown Pittsburgh, Pennsylvania, as a case study, the results presented here reveal that intersections with longer protected left-turn phases, longer permitted left-turn phases, and higher left-turn flows are more negatively affected by left-turn restrictions than other intersections. While fairly obvious—these are indicators of high left-turn activity, so the restrictions would have a larger negative effect than at other locations—the results provide decision-makers with an easy way to identify candidate locations to enact left-turn restrictions to improve overall traffic network performance, without the need for extensive and computationally complex simulation. While the specific locations to enact these restrictions will depend heavily on specific demand patterns and network structures, the results provided here reveal that even simply randomly selecting intersections with short left-turn phases (either permitted or protected) and low left-turn flows could provide positive effects. Conversely, selecting sites with higher left-turn flows and longer left-turn phases could be detrimental to overall traffic flow, owing to the longer distances incurred for these negatively affected trips.
The proposed method was tested only using a specific demand pattern (the p.m. peak) with varying magnitudes of demand to mimic unseen environments. In practice, these decisions could be made for unique demand patterns (a.m., midday, p.m. peak) and unique left-turn restriction configurations could be applied to each. Alternatively, the effect of a given configuration could be tested on all demand patterns to determine the pattern that provides robust performance in all scenarios. While not tested here, this can be easily adopted in the proposed methodology. Another interesting research direction may be to apply the proposed methodology to networks that demonstrate a less grid-like structure. This would allow a better understanding of the applicability of left-turn restrictions and their correlation to network topology.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: TA, VVG; data collection: TA; analysis and interpretation of results: TA, VVG; draft manuscript preparation: TA, VVG. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: Vikash V. Gayah is a member of Transportation Research Record’s editorial board. All other authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: NSF grant CMMI-1749200.