
Abstract
Raising parking charges is a measure that restricts the use of private vehicles. With the introduction of connected and autonomous vehicles (CAVs), the demand for parking has the potential to reduce as CAVs may not park at ‘pay to park’ areas as they are able to “cruise” or return home. However, it might not be financially feasible for them to return to their origin if the destination region is far away. Therefore, the question is: how could we develop parking policies in the CAVs era? To determine the best parking strategy for CAVs, four scenarios were tested in this paper: (i) enter and park within the destination area, (ii) enter, drop off, and return to the origin, (iii) enter, drop off, and return to outside parking and (iv) enter and drive around. Since real-world parking demand data for CAVs are not available, a simulation model of the road network in Santander (Spain) was employed to collect data on both CAV operations (e.g., conservative versus aggressive behaviors) and parking choices. Multinomial logistic regression model was used to identify the best parking option for CAVs. Performance indicators such as traffic, emissions, and safety were employed to compare the performance of a range of parking alternatives. It was found that the balanced scenario (i.e., combination of all parking choices) performs better with the greatest change in delay (around 32%). With 100% CAV market penetration, traffic crashes were reduced by 67%. This study will help local authorities formulate parking policies so that CAVs can park efficiently.
Car traffic has been gradually increasing worldwide, from around 550 million in 2000 to 1.1 billion in 2019 ( 1 ). According to Transport Statistics Great Britain ( 2 ), in 2017 around 30 million cars were registered in the United Kingdom (UK). It is interesting to note that personally-owned cars are parked for over 95% of their lives ( 3 ), which results in increasing demand for parking at various locations within metropolitan areas. Drivers tend to park their vehicles near their destinations. Furthermore, drivers often struggle to locate a parking place that meets their precise needs (proximity to destination, safety, and cost). As a result, a large amount of time is spent by drivers looking for parking spots ( 4 ). Creating additional parking spaces is not always feasible and building them on valuable property could raise parking fees. As the number of cars increases, so will the need for parking spaces. However, there may not always be adequate parking spaces. To address this, urban authorities work toward reducing the demand for parking places as well as the number of low-occupancy cars, sometimes with the implementation of parking fees ( 5 ). For individuals deciding whether or not to use a personal car as a mode of transport for a particular journey, the cost of parking is an essential factor to consider.
Raising parking costs as a way to dissuade people from driving passenger vehicles is not a new concept. The first parking meter was invented in 1935 by Carl C. Magee in Oklahoma City, and this is often considered a turning point in the implementation of parking pricing measures. Over time, parking fees have become more sophisticated, with variable pricing based on location, time of day, and demand, as well as the use of digital payment methods ( 6 ). According to a survey conducted by Healey and Baker in 1998 ( 7 ), 25% of local government authorities in the UK attempted to restrict parking places and about half of those stated that they would increase parking prices ( 6 ). A stated preference survey was conducted by Simićević et al. ( 8 ) to assess the influence of parking rates on parking usage. The survey found that the cost of parking and time constraints are related, with the cost of parking affecting vehicle use and time limits determining whether people park on- or off-street. Parking charges were also found to help manage parking places, but they may also distract from certain neighborhoods. In addition, research has shown that the cost of parking may influence the time it takes to commute ( 9 ).
Moreover, because an increase in vehicle numbers leads to greater congestion, pollutant emissions, and safety risks, governments introduce measures (e.g., raising parking charges) to restrict the use of private cars. As a result, traffic on the roads is reduced, resulting in better traffic flow movement on the highways as cars could reach free-flow speeds in less traffic. According to existing studies, less traffic in response to increased parking fees may also result in fewer road accidents ( 5 , 10 ). In future, a considerable increase in the number of connected and autonomous vehicles (CAVs)(up to 40% by 2035) is expected ( 11 ). This increase in CAVs will raise several important questions, such as: (i) how the introduction of these vehicles will affect the amount of parking spaces required, and (ii) how this will affect the way people commute. CAVs do not require parking near their destination because they may return home or relocate to places with adequate parking spots and lower parking charges. CAVs can roam until another passenger needs them, return to the trip origin, or park outside the destination zone. Based on the conditions, it may occur that some vehicles would return to parking areas while others will remain in the network. Several studies have been carried out to determine the number of parking places necessary for privately owned CAVs ( 12 , 13 ). Because these vehicles may travel without drivers, researchers have attempted to optimize parking spots to accommodate more autonomous vehicles ( 12 ). The parking demand in Spain is increasing at a rate of 3.5% per annum, as observed between 2012 and 2017 ( 14 ). In the field of road safety, in 2020, a total of 1,370 road fatalities were observed in Spain, of which 40% were car occupants ( 15 ). This study examines the effectiveness of various parking alternatives accessible to CAVS, as well as the resulting effects on traffic and environmental issues. This analysis of parking strategies is intended for city authorities who may wish to develop policies to ensure that CAVs park in the most effective manner within a city.
Literature Review
Finding an appropriate parking spot is a challenge for all types of vehicles; research shows that from 8% to 74% of human-driven vehicles drive around to locate a spot ( 16 ). Autonomous vehicles with self-driving capabilities can return to their origin or park in a nearby parking lot. However, returning to origin or searching for a parking spot may increase overall traffic in the network resulting in further delays and congestion ( 17 ). In this review, we aim to identify critical parking issues relevant to traditional vehicles and observe how these issues are expected to be addressed by the introduction of CAVs.
Human-Driven Vehicles
Wang et al. ( 18 ) investigated how on-street parking charge regulations affect parking features such as parking turnover, parking duration, and parking elasticities in the case of an increase in per-hour on-street parking fees. The average parking duration was observed to steadily decrease once the parking charge modifications were implemented. As a result, parking elasticities were discovered to fluctuate over time, as a result of drivers restricting their parking duration in response to price increases. Another study by Mei et al. ( 19 ) created an assessment model for parking policies based on system dynamics to investigate the impacts of parking fees and supply policy on traffic speed. In the case of unrestricted parking, the study revealed that the average travel speed would be reduced up to 16%, with traffic system performance at its best with very high prices compared with a zero-price option. Furthermore, an agent-based simulation case study in the central business district of the city of Wulin (Hangzhou, China), compared three tactics—different parking lots at the same rates, different parking lots with different rates always, and different parking lots with different rates during peak hours—to discover which performed the best ( 20 ). The main findings were that: (i) for the two strategies with varying parking prices, there were improvements in average travel time, average travel distance, and failure rate (percentage of cruising vehicles), (ii) varying parking prices can disperse drivers to less popular parking areas, which means parking resources are used more effectively, and (iii) the best performing parking strategy was where parking prices were varied only at peak times, which had the best comprehension (i.e., combination of low average cost and failure rate).
Moreover, parking fees can influence the choice of transportation mode. A study by Alavi ( 21 ) employed four case study regions in the Greater Toronto Area, Canada, and an online survey of 100 current drivers to obtain self-reported parking pricing data and parking availability. An ordered logit analysis was performed, and it was discovered that raising parking costs would increase drivers’ readiness to change modes of transportation, with a substantial link between drivers’ willingness to change mode and a rise in parking fees. However, when parking availability is included, parking cost is found to be less important (i.e., less availability resulted in more willingness to change even with low parking charges).
Traffic safety was also investigated in research conducted by Litman ( 10 ) where the influence of parking costs on traffic safety was explored. As crowded metropolitan areas are more likely to have parking pricing imposed and also have high crash rates, parking costs might bring considerable safety advantages and lead to much lower crash rates. As to their travel implications, the implementation of parking charges might reduce car travel by 10% to 30%, depending on the type of journey, the type of users affected, and the availability of alternative transport choices and parking. Some alternatives to parking prices as means to improve the traffic conditions, such as “congestion pricing,” were considered by Feldman et al. ( 22 ) and Alvinsyah and Fathurrizqi ( 23 ).
CAVs
There is evidence that the deployment of self-driving vehicles will reduce travel time ( 24 , 25 ). Rezaei and Caulfield ( 26 ) found that adding autonomous cars reduces travel time, but that the trend is not consistent and fluctuates. Although several other studies have also indicated that increasing the fleet proportion of autonomous cars decreases trip time ( 27 , 28 ), these studies took into consideration a wide variety of parking costs. When passengers have many parking alternatives, the impact may differ.
Millard-Ball ( 29 ) evaluated the possible impact of CAV parking behavior on parking demand. Based on a case study of San Francisco, they examined various legislative choices to estimate the potential scope of CAV parking behaviors using microscopic simulation to quantify the potential congestion implications of cruising automobiles. According to that study, as CAV traffic increases, CAV parking behavior will result in a huge decrease in parking costs. This is because CAVs will no longer need to park in “pay to park” areas; instead, they will be able to “cruise” or “return home.” The decrease in parking costs will stimulate more automobile excursions, resulting in increased vehicle travel and congestion on each trip (as a result of the CAVs cruising, returning home, or traveling to free street parking). Congestion charges would make more economic sense as the prevalence of CAVs grows in the future. Bahrami and Roorda ( 30 ) investigated parking fee options and discovered that travelers would prefer to send their vehicles home if they had to pay a parking fee. They found that AVs could travel for a maximum of 47 min to find a cheaper parking spot. Moreover, charging the same price for parking at different facilities would lead to congestion. A toll for AVs without human occupants could lead to a trade-off between parking cost and distance traveled, leading to a decrease of 3.5% in vehicle kilometers traveled ( 30 ). Nourinejad and Amirgholy ( 17 ) studied the impact of parking on morning peak hours in autonomous vehicles. Several cases considering the parking spaces located near and away were considered in the study.
Autonomous vehicles are about to be deployed on the roads, and their impact on parking is not yet well investigated. For example, a study by Zhang et al. ( 31 ) utilized a microsimulation model to examine AV parking scenarios in the central business district of San Francisco. The results showed that an increase in vehicle-miles traveled from empty vehicle travel and parking search travel could increase CO2 emissions, especially from vehicles that get stuck in traffic congestion. The finding suggested that the shift from parking trips to dynamic drop off and pick up trips with AV market shares would improve traffic flow and reduce emissions because of reduced parking search time and more efficient use of parking spaces. In addition, several studies have shown that parking strategies pose hazards and increase the risk to vulnerable road users ( 32 , 33 ), particularly children, who are in the most dangerous position because of their limited ability ( 34 – 36 ). According to the statistics of KidsandCars, there were 1,502 fatalities of children aged 14 and under in the United States caused by “back over” incidents (when a vehicle is reversing out of a parking spot) between 1990 and 2021 ( 37 ). With the capabilities that autonomous driving will introduce, traffic flow, mobility, and safety can be improved ( 38 ). However, if parking strategies are not chosen properly, vehicles may run on the road unnecessarily and adversely affect traffic, leading to congestion and safety issues. The lack of data makes it challenging to analyze the exact impact of the introduction of CAVs. Therefore, the current study employs a methodology with different microsimulation scenarios to comprehend and assess the effects of CAVs on travel time, flow, emissions, and safety when different parking options are provided. According to the authors’ best knowledge, this is the first attempt in which the safety impacts have been assessed using a method to convert several conflicts into crashes.
Methodology
The purpose of this study is to create different parking behaviors of CAVs and evaluate how such scenarios influence network-wide traffic, emissions, and safety. Unfortunately, real-world data on CAV operations are not available at a network level. Therefore, a simulation approach has been adopted in this study. More specifically, a traffic microsimulation model of the city of Santander, Spain, developed in Aimsun Next as part of the LEVITATE project (funded by the European Commission under Horizon 2020) was used to investigate the impact of different parking behaviors exhibited by CAVs (Figure 1). The network consists of a total of 382 links and 108 nodes. The evening hours, from 19:00 to 22:00, were considered in the research representing a total of 42,337 private automobile journeys during this time.
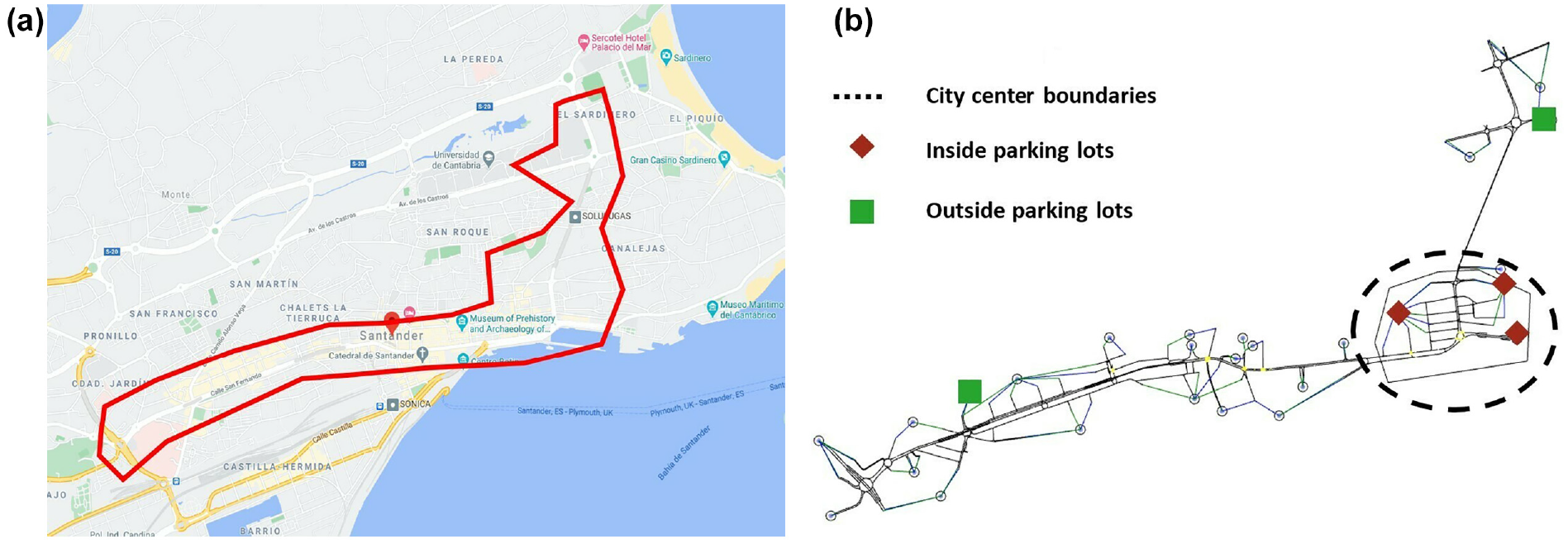
Network area modeled: (a) the city of Santander and (b) Aimsun simulation model.
Changing the price of parking can encourage certain parking behaviors. However, these behaviors can also be influenced by restricting the total number of parking spaces that are available within a given area. There is a widespread belief that, when CAVs become commonplace, people will be able to command their highly automated vehicles to drive around with no human occupants (“passengers”) to avoid parking for a short period of time ( 39 ). For the purpose of this study, we looked at four different parking choices (Figure 2):
Enter the city center area and park in it (i.e., “no policy intervention”—consistent with the current situation);
Enter the city center area, drop off passengers, and return to origin to park (both outside and inside the city center area included);
Enter the city center area, drop off passengers, and drive outside to park; and
Enter the city center area, drop off passengers, and drive around in it (short stay).
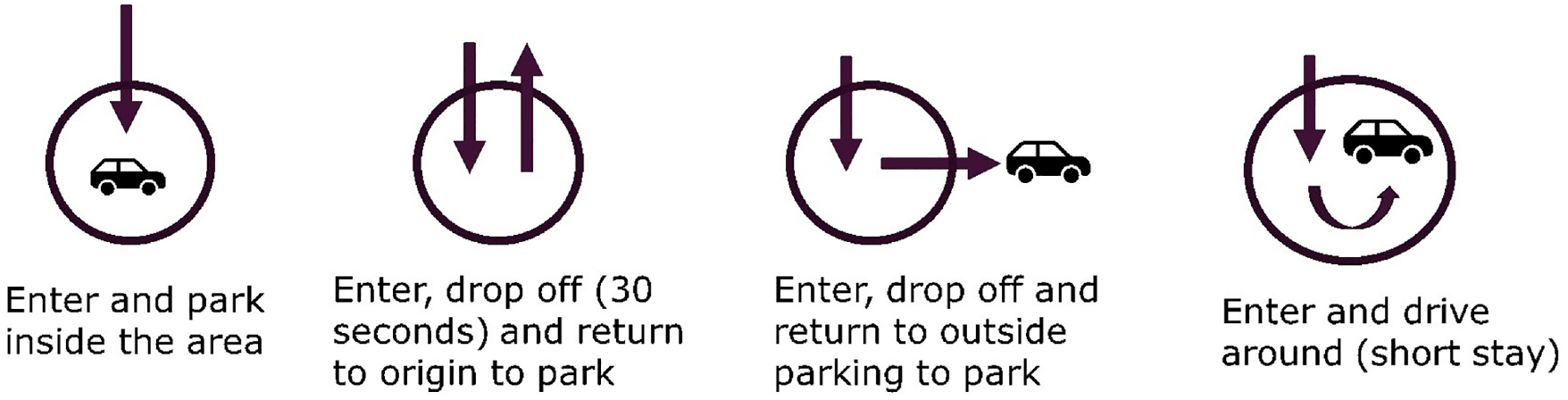
Schematic of parking strategies in this study.
With these options, vehicles have the flexibility to park in any of the available facilities. However, a parking cost for the destination was adjusted in several different ways so that choice behavior could be studied. The following method, as illustrated in Figure 3, was utilized to determine the percentages of vehicles that selected a certain option. First, a search was conducted to locate automobiles that required parking within the city center area. From the central area, the cost of going back home (i.e., origin) was determined and compared against the cost of parking within. In other cases, the cost of other alternatives was determined. Based on these prices as well as the cost to park within the central area, a logit model was developed to determine the percentage of each vehicle’s parking strategy. A flow chart of the methodology is given in Figure 3.
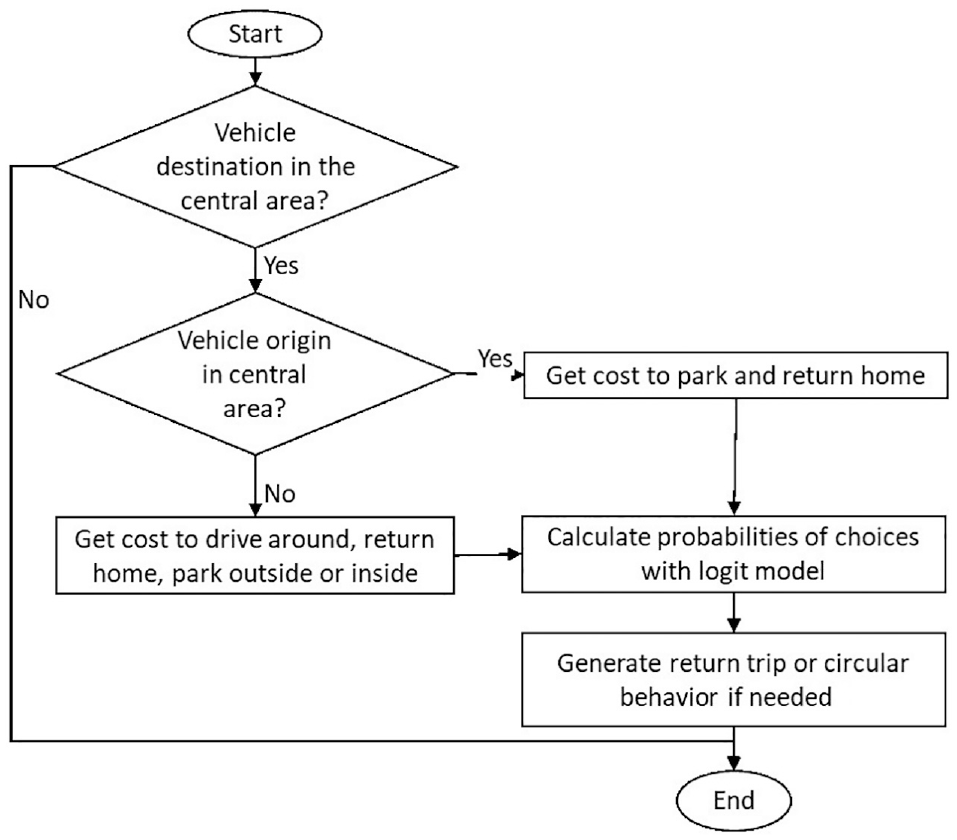
Choice modeling of parking strategies.
Development of Multinomial Logit Function for the Choice of Parking Strategy
As stated above, in this study four parking options were available to CAVs (Figure 2). A multinomial logistic regression was applied to choose between the proposed strategies based on the parking charges. Parking inside the city center was taken as a “no policy intervention” case to calculate the probability of other parking options. Equations 1 to 4 below show the estimated probabilities for each of the four parking choices derived from the multinomial logistic regression model.




If the “no policy intervention” scenario is taken as a reference, then the probability equations mentioned above can be modified as follows:

Therefore,

Similarly,


where

where
Different scenarios were considered based on the proportions of vehicles choosing different parking options (Table 1). In the “no policy intervention” scenario, it is assumed that sufficient spaces are available for all the vehicles entering the network in each parking station, and vehicles can park themselves inside without causing any disturbance to the traffic. In the “heavy drive around scenario” vehicles drop the passenger and drive nearby until they are called by their users. In the case of “heavy return to the origin and park outside,” vehicles perform a mixed activity of parking outside the city center and return the origin. The “balanced” scenario consists of a combination of all the parking choices available.
Scenarios Relating to the Prevailing Parking Strategies

The LEVITATE project considered two types of CAV technology: first generation and second generation CAVs ( 38 ). Both types are assumed to be SAE Level 5 fully autonomous vehicles. Modeling these two types is based on the assumption that technology will advance over time. The main assumptions on first and second generation CAV characteristics are:
First generation CAV: limited sensing and data processing capabilities, long gaps, anticipation of lane changes earlier than human-driven vehicles and longer time in give-way situations.
Second generation CAV: advanced sensing and data processing capabilities, data fusion usage, small gaps, anticipation of lane changes earlier than human-driven vehicles and less time in give-way situations.
The characteristics of human-driven vehicles and both CAV types were defined by adjusting various parameters of the Gipps car-following model ( 40 , 41 ) in Aimsun ( 42 ), such as reaction time, time gap, acceleration and deceleration characteristics, and parameters related to lane changing and overtaking behavior (Table 2). More details on the parametric assumptions and values of key parameters can be found in Chaudhry et al. ( 43 ). Default Aimsun Next parameters were used to implement public transport vehicles.
Parameters for Human-Driven Vehicles and Connected and Autonomous Vehicles (CAV)
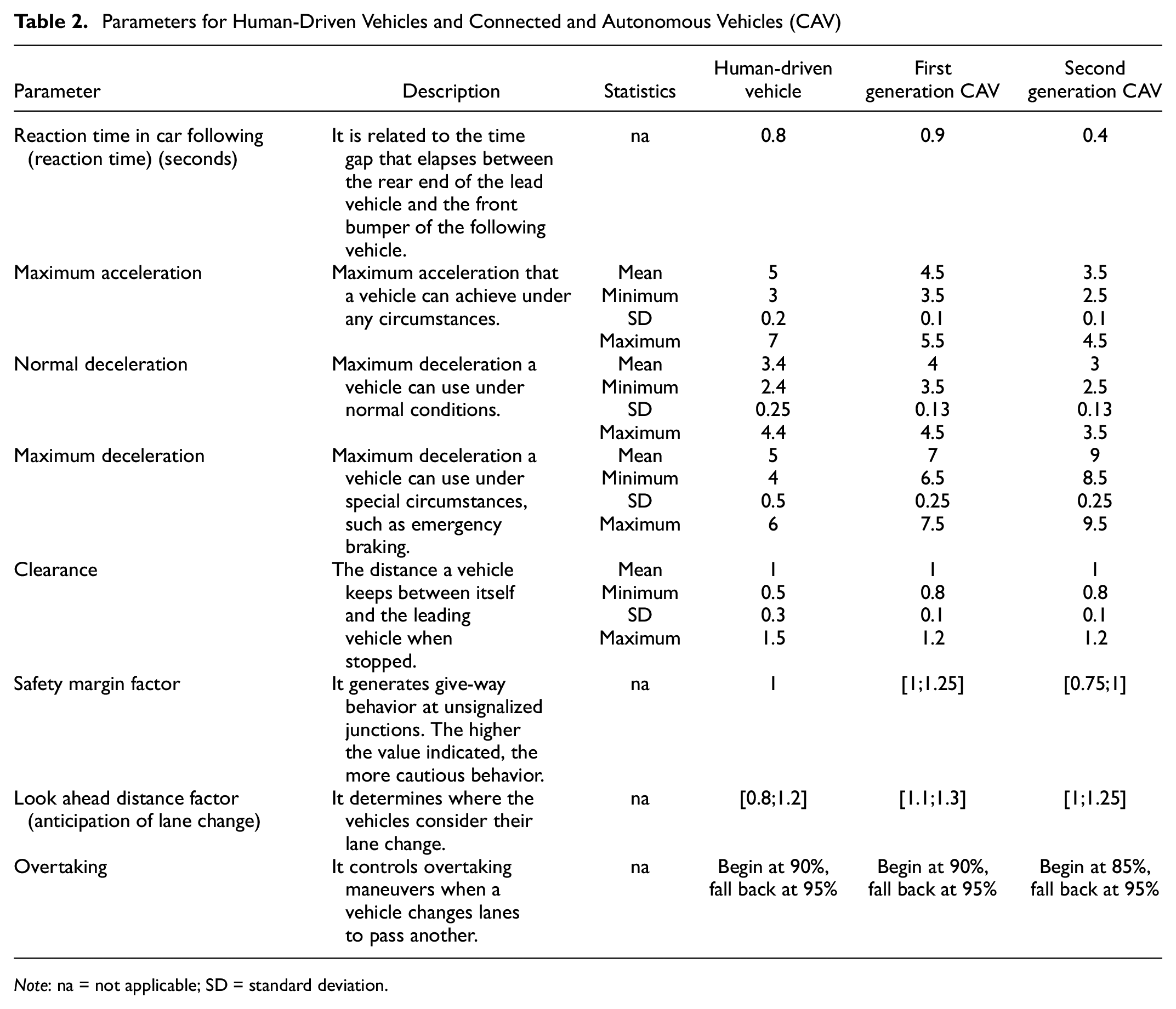
Note: na = not applicable; SD = standard deviation.
The deployment of CAVs in the network was evaluated from 0% to 100% in 20% increments (Figure 4). The fleet included passenger and public transport vehicles, but automation is only considered for passenger cars. Each simulation consisted of 10 replications using different random seeds.
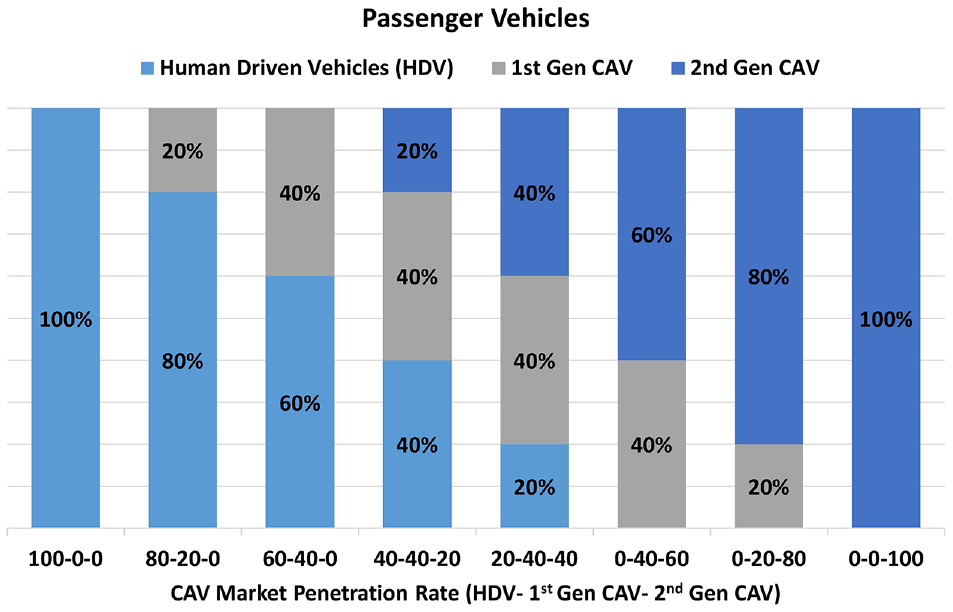
Scenarios for deployment of passenger connected and autonomous vehicles (CAVs).
The following assumptions have been made for this study:
All CAVs have electric propulsion.
All human-driven vehicles are non-electric vehicles and use conventional parking destinations.
CAVs and human-driven vehicles can travel together without any requirement for dedicated lanes.
Heavy goods vehicles and large goods vehicles are not considered in the traffic composition.
Automation and electrification were not considered for public transportation.
There exist only the given parking options.
CAVs are allowed to park only in the specified parking areas (shown in Figure 1).
Results and Discussion
Network level results were analyzed considering three aspects: (i) mobility aspect considering travel time, delay, and flow and total distance traveled, (ii) environmental aspect considering emissions of Particulate Matter-10 (PM), CO2, and nitrogen oxides (NOx), and (iii) safety aspect (crashes).
Mobility
Figure 5 shows the impact of different parking strategies with respect to the “no policy intervention” case on various aspects of traffic behavior, such as delays, flows, and queues (Figure 5a). Furthermore, it can also be observed that the change in travel time increases with the market penetration rate of CAVs. The maximum increase can be observed in the case of “heavy return to origin and park outside” (around 30%).
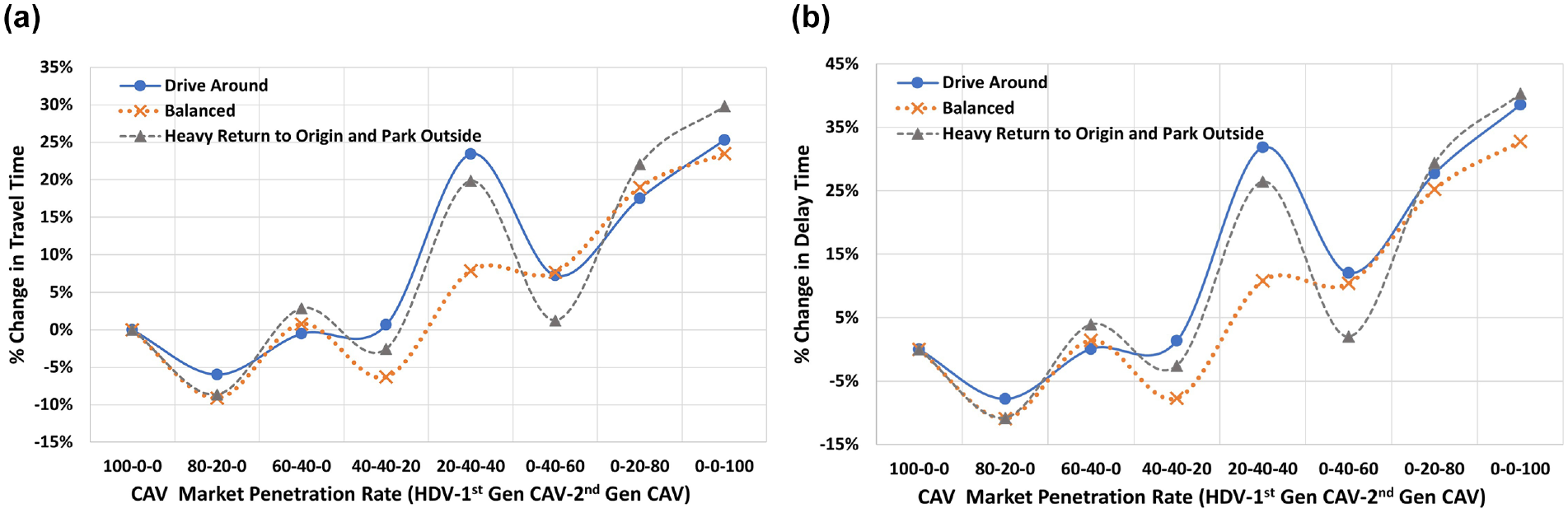
Percentage change in travel time and delay with “no policy intervention” scenario: (a) travel time and (b) delay.
The trend of the data for delay can be seen in Figure 5b. This trend is similar to the trend observed for travel time (Figure 5a). The delays in the “balanced” case are the least compared with other scenarios, including “drive around” and “heavy return to origin and park outside.” However, in some scenarios of traffic composition, the performance was similar. The reason for this is that in the “drive around” scenario vehicles are never parked, thus increasing the traffic (congestion) on the road (Figure 6a). As a result, the travel time is increased. Similarly, in the case of “heavy return to origin and park outside,” most vehicles use the road and return to the parking space, leading to increased traffic and travel time. In the “balanced” scenario, however, some of the vehicles (13%) parked inside the center, leading to decreased traffic. As a result, the delays are comparatively the shortest in the “balanced” scenario.
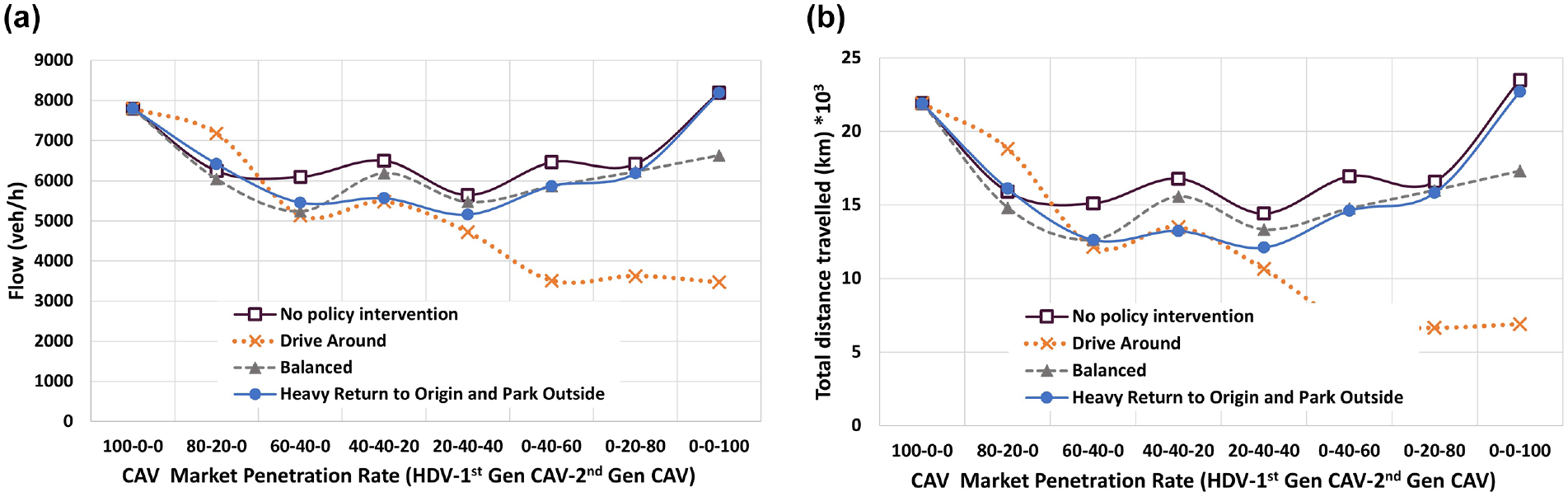
Impact on traffic flow and total distance traveled with increased market penetration rate of connected and autonomous vehicles and different parking strategies: (a) traffic flow and (b) total distance traveled.
The effect on the traffic flow can be understood from Figure 6a. Traffic flow was lowest (around 56% lower than “no policy intervention”) in the “drive around” scenario. This happened because the majority of vehicles were on the road while waiting for the passenger to ride again, causing congestion. The total distance traveled by all vehicles crossing the network during the simulation period for the considered scenarios is shown in Figure 6b. It can be seen that the distance traveled in most cases is almost the same. However, the distance traveled in the case of “drive around” decreases with the increment of the CAV market penetration rate. This could be related to the congestion on the roads (Figure 6a), as vehicles were not allowed to return to the parking spaces, and the volume of traffic increased with the market penetration rate of CAVs.
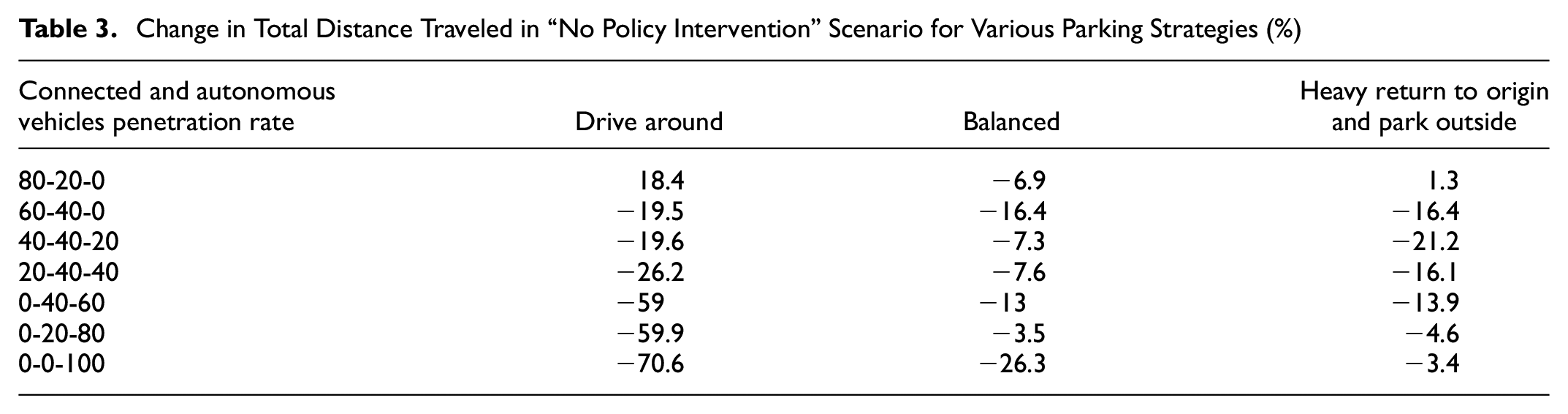
The change in the travel distance with “no policy intervention” can be seen in Table 3. The most significant change (up to around 71%) occurs in the case of “drive around.” As discussed earlier, the reason for this could be the presence of a heavy volume of traffic on the road. In the remaining CAV parking strategies, this change maintains a small range (from −26.3% to 1.3%).
Change in Total Distance Traveled in “No Policy Intervention” Scenario for Various Parking Strategies (%)
Environment
The emissions were directly obtained from the Aimsun Next microscopic simulation using the model of Panis et al. ( 44 ) based on the instantaneous speed and acceleration. The effects of CAV penetration rates on emissions in various parking scenarios are depicted in Figure 7. It is evident that emissions drastically decrease as the market penetration rate of CAVs rises. This held true across all the various study scenario tests. This is primarily because in the simulation model all the CAVs were electric vehicles. As a result, emissions decrease as the percentage of CAVs rises. However, some emissions from traditional public transportation were seen at the highest market penetration rates.
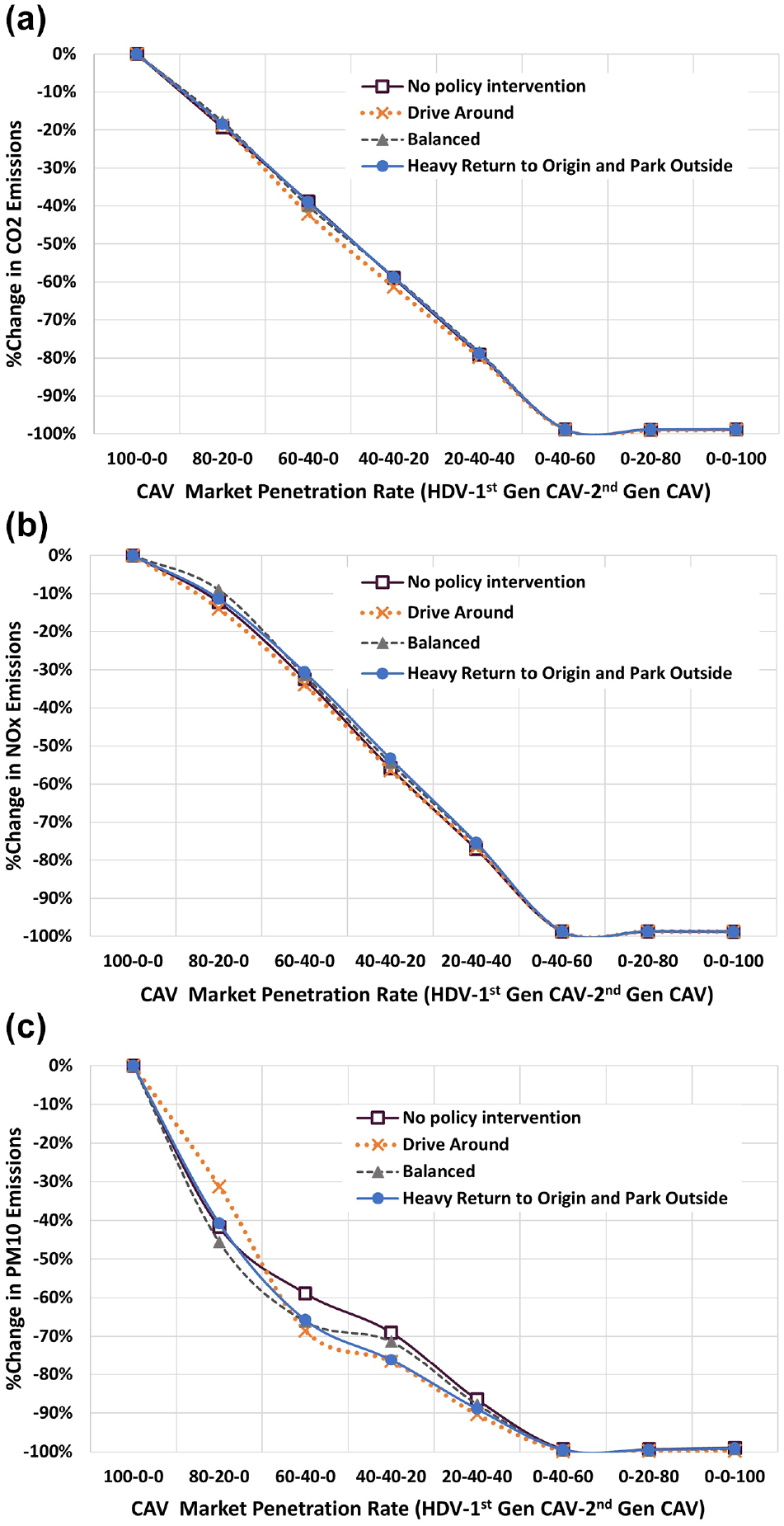
Impact on emissions of different market penetration rates of connected and autonomous vehicles and parking strategies: (a) CO2 emissions, (b) NOx emissions, and (c) particulate matter (PM-10) emissions.
Further, it can be observed from Table 4 that the emissions can be reduced significantly in the “drive around” scenario compared with “no policy intervention.” However, it is important to understand that this cannot be considered an advantage because the traffic flow is negatively affected in the “drive around” scenario compared with other scenarios (Figure 6a), making the network congested. The congested network causes a significant reduction of emissions in the “drive around” case as public transport vehicles cannot enter the congested city center in the network and therefore AVs prevail in that scenario. However, this should not be considered an improvement. Emissions observed in the full CAVs scenarios (market penetration rate from 0-40-60 to 0-0-100) were from the background public transport vehicles, which were not considered as electric vehicles in this study.
Change in Emissions in “No Policy Intervention” Scenario (%)
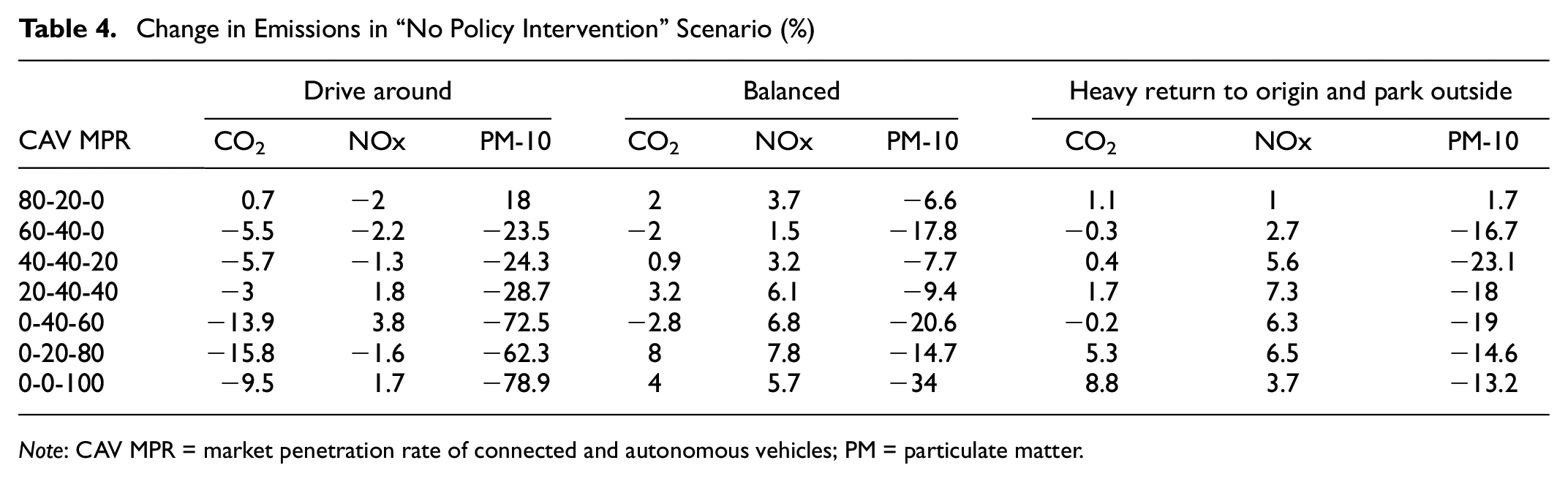
Note: CAV MPR = market penetration rate of connected and autonomous vehicles; PM = particulate matter.
Safety
Simulation software usually does not generate crashes, so the surrogate safety measure of conflicts was generated from Aimsun ( 42 ) and extracted using Surrogate Safety Assesment Model (SSAM) ( 45 ). The SSAM generates three types of conflicts, namely crossing, rear-end, and lane-change conflicts. According to the literature ( 46 ), rear-end conflicts could increase when AVs and conventional vehicles coexist on the roads. However, in the framework of this research, the effect has been examined collectively for all types of conflicts and not separately. The conflicts were converted to crashes using a probabilistic approach proposed in a study by Tarko ( 47 ). The main input for Tarko’s approach is the time-to-collision (TTC) threshold ( 47 ). In the current study, different TTC thresholds were defined based on vehicle types involved in an interaction. TTC value of 1.5 s was set for HDVs, and 1.0 s and 0.5 s were determined for first generation CAVs and second generation CAVs, respectively. These TTC thresholds for every vehicle type were considered based on the literature ( 48 – 50 ). More details about the methodology can be found in Sha et al. ( 38 ). The resulting crash rate predictions for the “no policy intervention” and each scenario can be seen in Figure 8. The crashes are normalized in units of vehicle kilometers to control for variations in traffic volume within the simulated area.
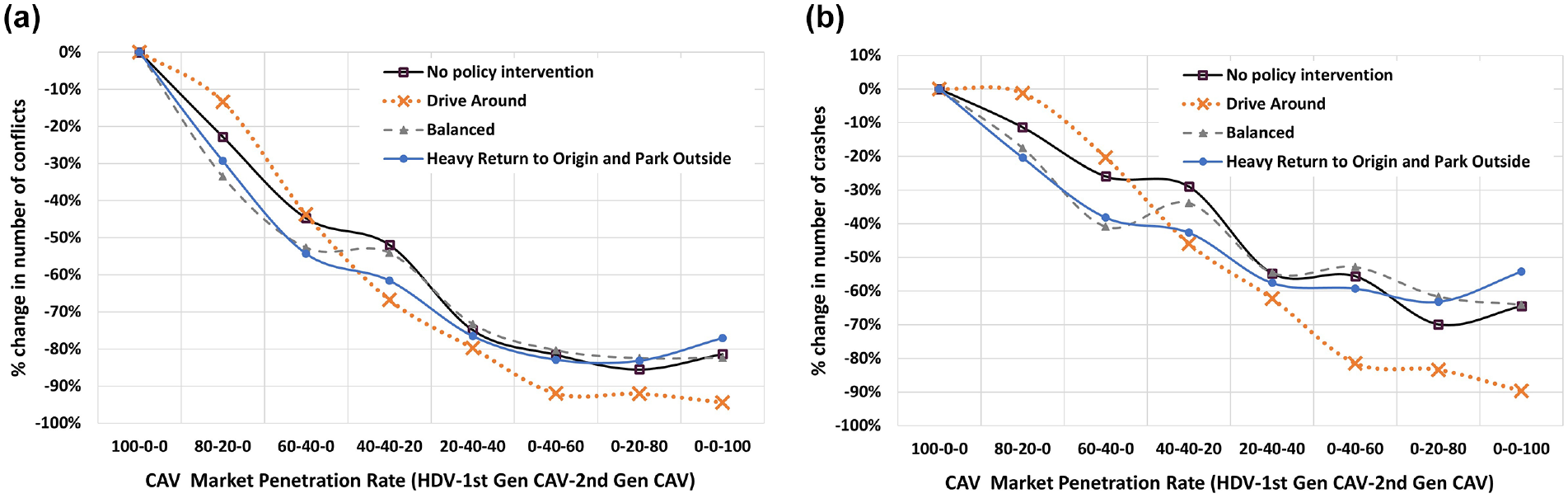
Safety impacts of parking strategies: (a) change in conflicts (%) and (b) change in crashes (%).
In general, according to the results, safety will improve with the inclusion of CAVs. However, differences can be detected in the effect that different scenarios have on the number of conflicts and crashes (Figure 8). The decrease in crashes and conflicts for the “drive around” scenario could also be affected by the reduced traffic flow in the network (Figure 6a). All four parking scenarios result in comparable decreases in crash rates (55%–67% reduction) when compared with the starting point of only human-driven vehicles on the road, even at the highest penetration of CAVs scenario (100% second generation CAVs). However, when 20 to 40% of the fleet of vehicles is automated, an increase in crash rates is anticipated at lower penetration rates. This is primarily caused by interactions between human-driven vehicles and CAVs, which are expected to have different driving characteristics (e.g., shorter headways adopted by CAVs) and capabilities (e.g., longer reaction times of human drivers), which may result in an initial increase in risks when many human drivers are still on the road.
This risk in mixed traffic is especially evident in the “drive around” scenario, in which the automated vehicles increase traffic congestion and, consequently, the likelihood of conflict. The peak in crashes anticipated at the 60-40-0 penetration rate is expected to be explained by the additional congestion of first generation CAVs circulating in the network along with a still relatively high rate of human-driven vehicles (60%).
Conclusion
In this study, it was hypothesized that raising parking costs would affect the way CAVs park. In place of paying a higher price to park at the destination, CAVs were enabled to make different parking choices in the simulation model: driving around, going back to the starting point, parking outside the center, or displaying balanced parking behaviors. When compared with the “no policy intervention” scenario, it was found that the impacts on mobility, travel time, and delay increased with the increasing market penetration rate of CAVs (“no policy intervention”). The delay can increase by up to 39% in a “drive around” parking scenario. A rise of 33% and 40%, respectively, results from the “balanced” and “heavy return to origin and park outside” scenarios. The “drive around” approach performed worse than these strategies. For the “drive around” and “heavy return to origin” parking choices, delays increased by the most (both by 30% and 25%, respectively). A “balanced” parking strategy may help both to mitigate the negative effects of parking fee regulations and promote the use of more active modes of transport. One of the possible explanations is that the tested policies encourage most vehicles to drive around or return to their starting point rather than park at the destination, which can result in more traffic on the network and congested roads. On the other hand, with the increase in share of electric CAVs, emissions were significantly decreased in all scenarios. Traffic crashes were reduced by 55 to 67%, indicating an improvement in safety.
The growing market share of CAVs could change how people park their vehicles, posing new problems for local government. The mobility and environmental effects would depend on the various driving and parking habits of CAVs; for instance, a first generation CAV behaves differently than a second generation CAV. As the number of CAVs, which are also electric vehicles, rises, there will be benefits and drawbacks that cities may find difficult to balance. Cities need to implement mitigating strategies to prevent increases in congestion as they have little control over the growing market penetration rate of CAVs. The road safety analysis in this study indicated that at lower CAV market penetration rates with 20 to 40% of the fleet being automated, crash rates might increase. This is mainly because of the anticipated dissimilarities in capabilities and driving styles between CAVs and human-driven vehicles. This elevated risk brought on by mixed traffic is particularly evident in the “drive around” scenario, where the automated cars add to the already existing traffic jams and potential conflict situations.
The benefits that CAVs can offer heavily depend on the parking requirements. A variation in travel time of 31% can result from different parking strategies. Without the implementation of appropriate policy measures, an increase in parking prices can result in negative impacts; however, it can also have positive impacts on the environment, mobility, and safety. Different pricing options (peak/off-peak charges) and parking locations (e.g., on-street parking available) can be further investigated in future research.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: M. Singh, M. Quddus; data collection: M. Singh, R. Haouari; analysis and interpretation of results: M. Singh, R. Haouari; draft manuscript preparation: M. Singh, R. Haouari, E. Papazikou, H. Sha, A. Chaudry, P. Thomas, A. Morris. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The present research was carried out within the research project LEVITATE - Societal Level Impacts of Connected and Automated Vehicles, which received funding from the European Union’s Horizon 2020 research and innovation program under grant agreement No. 824361.
Data Accessibility Statement
The data, models, or code that support the findings of this study are available from the corresponding author on reasonable request.