
Abstract
Emergency vehicles (EVs) are at high risk of accidents during emergency driving. To make use of countermeasures to mitigate these risks, it is important to understand under what circumstances EV-related accidents occur. The common risk factors for EV-related accidents were examined through a systematic literature review. A total of 22 articles were examined for risk factors associated with EV-related accidents. The most reported risk factors were, in order of frequency, intersections, daytime, dry roads, clear weather, urban roads, traffic signals, and angular collisions. The articles were also reviewed for suggested countermeasures to mitigate the risk factors. The most commonly suggested countermeasures were driver training for EV operators, educating the public, exercising caution at intersections, wearing a seatbelt, and intelligent vehicle technologies. Cooperative intelligent transport systems (C-ITSs) have the potential to mitigate the risks of EV-related accidents. Therefore, three C-ITS services were investigated: EV approaching, EV preemption, and geofencing. They could all be used to inform, warn, or control aspects of driving. Each suggested service has the potential to decrease risk factors for EV-related accidents. The current literature review provides guidance on under what circumstance and in what form C-ITSs could be beneficial to prevent EV-related accidents. Further research is needed to examine behavior when drivers are introduced to C-ITSs.
Keywords
Emergency vehicle operators (EVOs) are subject to high risks during emergency driving. This applies to all types of emergency vehicles (EVs). Ambulances, for example, are more likely to be involved in accidents compared to similar-sized vehicles ( 1 ), and the second most frequent cause of death for U.S. firefighters in 2019 was vehicle accidents ( 2 ). Meanwhile, police cars have been identified as the type of EV most often involved in traffic crashes ( 3 – 5 ).
The different types of EVs (e.g., ambulances, police vehicles, fire trucks) face unique challenges because of variations in their tasks. However, there are also several shared risk factors associated with increased accident occurrence for EVs ( 6 ), such as the drivers performing cognitively demanding tasks while driving, driving at high speeds, and interactions with civilian drivers in the surrounding traffic. Accidents involving EVs and civilian drivers are recognized as a common cause of fatal and nonfatal injuries in traffic ( 7 ). In several countries, EVOs are allowed to violate traffic regulations, such as exceeding the speed limit and running red lights, to reach their destination as fast as possible ( 3 ). These deviations from the traffic regulations might save time, but can also increase the risk of accidents ( 8 ). Civilian drivers might not expect the EVOs’ particular driving behavior, or detect the EV in time to allow for safe interaction. To mitigate the risk of collision, the EVO must therefore continuously predict how surrounding traffic will react to their presence and attempt to alert the traffic to its presence.
Warning lights and sirens (WLS) are commonly used to increase the detectability of the EV and provide more time for civilian drivers to react. In some countries, civilian drivers are obligated by law to give way if encountering an EV with WLS engaged. In the U.S.A. and Canada, the obligation to clear the path for the EV is called the Move Over Law ( 9 ), and similar laws exist in countries such as Australia, Austria, Sweden, and the UK ( 10 – 13 ). However, depending on the speed of the vehicles, sirens are typically perceived by drivers when the EV is only 100–200 m away ( 14 ). This leaves very little time for the driver to adapt or give way. Vehicles produced today are also more soundproof than before, which further diminishes the driver’s ability to hear approaching EVs. Moreover, even if a driver perceives the WLS, it is not certain that they will know how to act. In particular, young drivers are believed to have poorer knowledge than older adults of their responsibilities when encountering an EV in emergency mode ( 15 ).
The reliance on lights and sirens also creates particularly problematic interactions between EVOs and civilian drivers in certain settings. For instance, intersections have been recognized as an environment associated with EV and civilian vehicle accidents ( 6 , 16 , 17 ). One explanation is the limited sight range of intersections and difficulty in determining the direction of a siren. Another is a prognostic failure, where the drivers assume that surrounding traffic will obey existing traffic regulations. If an EVO runs a red light in an intersection, the civilian driver might not be able to perceive the light nor siren early enough, possibly resulting in too little time to react to the unexpected event ( 18 ).
Solutions other than lights and sirens are therefore necessary to prevent accidents involving EVs. One suggested solution is cooperative intelligent transport systems (C-ITSs). The term C-ITS encompasses a variety of solutions that can be used to inform, warn, or control an aspect of driving, such as speed or access control. The solutions allow traffic managers and road users to distribute information through digital connectivity ( 19 ) and have the potential to increase traffic safety ( 20 ). Multiple C-ITS services have the capability to create a safer interaction between EVOs and civilian drivers, such as emergency vehicle approaching (EVA), geofencing, and emergency vehicle preemption (EVP). EVA is a system that provides civilian drivers with an in-car warning that an EV is approaching. Geofencing, on the other hand, marks virtual parameters in the world and creates rules that drivers must follow based on their position, for instance, to force drivers to maintain a lower speed in a certain area ( 21 ). Finally, with EVP an EV can send a request to a traffic signal. If the request is accepted, the traffic signal will give the EV a green light faster than it would have without the request. The use of an EVP system might not be noticed by the civilian driver, even if the result probably affects their behavior.
The purpose of the current study was to conduct a systematic literature review of common risk factors for EVs as well as of the C-ITS services that may serve to reduce these risks. Several prior studies have investigated risk factors associated with EV-related accidents and suggested countermeasures. However, no previous study has reviewed and compiled those suggested countermeasures. There are also studies that have explored the potential of specific, individual C-ITS services in relation to EV accidents, such as Wu et al. ( 22 ) and Lenné et al. ( 23 ). However, there are to our knowledge no studies that have reviewed the various C-ITS services in relation to suggested countermeasures against EV risk factors. Because of the multifaceted nature of C-ITSs, it is meaningful to consider the potential of different solutions, such as EVA, geofencing, and EVP. The current study will therefore review both common risk factors associated with EV accidents as well as the potential of different C-ITS solutions to address these factors.
Method
A systematic literature review was conducted. The scope included both risk factors related to EV accidents as well as studies on C-ITS solutions related to EV accidents. The first step of the systematic literature review was an exploratory database search to examine the frequently occurring keywords concerning EV-related accidents and C-ITS services. The searches were performed to establish an overview of the current literature. A structured search was then performed using frequently occurring keywords.
The second step was to construct search strings based on the identified keywords. Five search strings were constructed to cover EV-related accidents, the C-ITS with EV relation in general, and three C-ITS services (geofencing, EVP, EVA). Three databases were selected for the review: Scopus, Pubmed, and Google Scholar. The databases were chosen to include a broad variety of articles and subject areas. Scopus’ contribution was the social science perspective, while Pubmed provides articles with a medical focus. Google Scholar provides more search results, decreasing the risk of omitting relevant articles. For Google Scholar, the review process was terminated when 100 consecutive search results were deemed irrelevant. All search results for Pubmed and Scopus were considered. The databases were searched during June 2022 using the search strings presented in Table 1. Finally, additional papers were found via citation pearl growing, that is, by reviewing the reference lists of the included articles. The asterisks in the search strings refer to a multiple character wildcard.
Search Strings
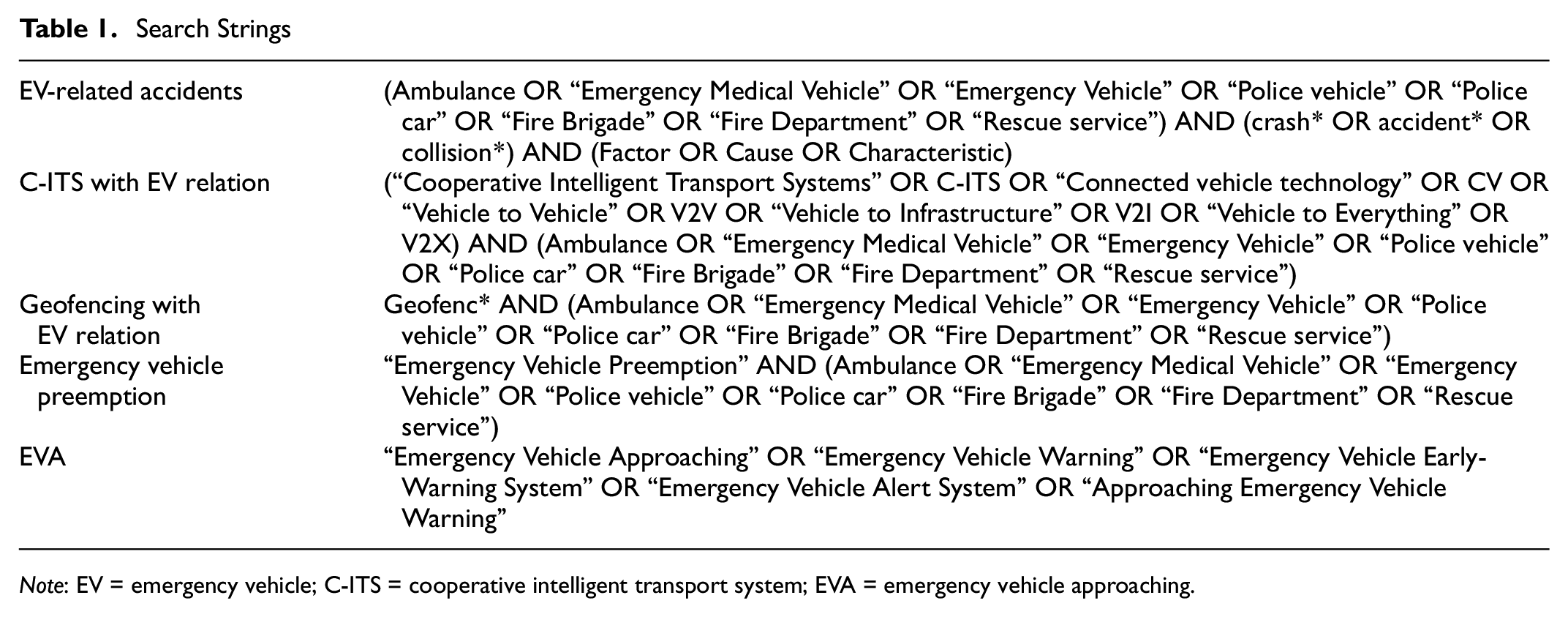
Note: EV = emergency vehicle; C-ITS = cooperative intelligent transport system; EVA = emergency vehicle approaching.
The results of the database searches were first subjected to a title review, then an abstract review, and finally a full-text review. The process of article selection is presented in Figure 1. For an article to be included it had to meet the following criteria:
1) present findings about either EV-related accidents or the C-ITS services of interest;
2) be included in a peer-reviewed journal, conference paper, doctoral thesis, or a report by a government agency or research institute;
3) be available in English.
Articles concerning EV-related accidents with vehicles not traveling on land were excluded (e.g., air medical service). Furthermore, articles comparing characteristics of fatal and nonfatal EV-related accidents were not included. Technical papers were included to discuss the function and development of C-ITS services.
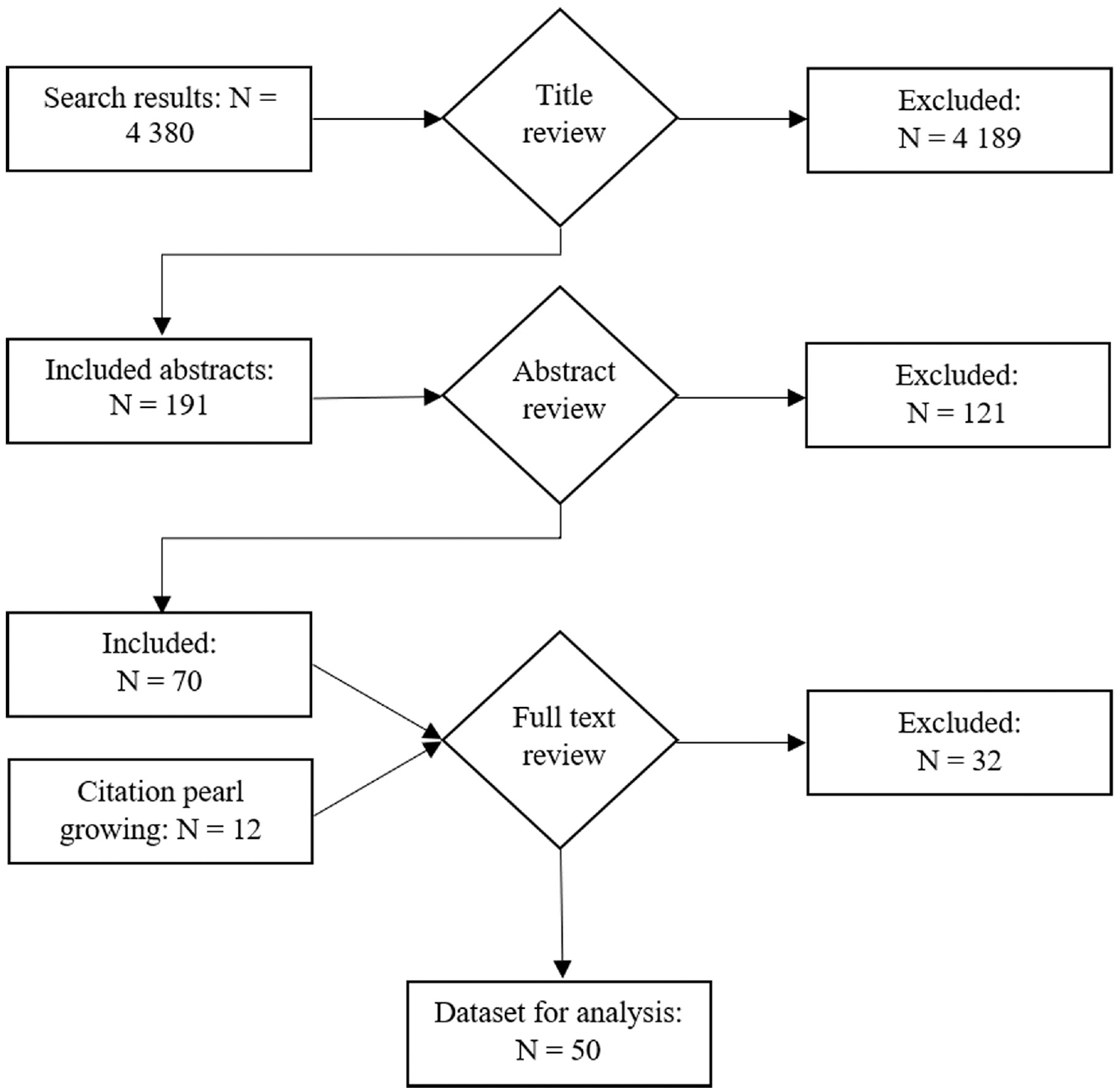
Search and selection process of the review.
Analysis
Seventy articles were selected for full-text review. An additional 12 articles were found through citation pearl growing. The full-text review was performed through a review matrix. The matrix allowed for an overview of the purpose of the article, if the research presented original findings, a review of the methodology, evaluation of the reported results with respect to the research objective, and finally the relevance of the findings in relation to the present study’s purpose.
Results
Risk Factors for Emergency Vehicles
Twenty-two studies that examined risk factors associated with EV accidents were included in the literature review. Most of these studies reviewed accident databases. A few studies ( 24 – 26 ) collected qualitative data through, for example, interviews with EVOs to identify factors associated with EV-related accidents. The articles based on data collected from accident records hold more specific data points, such as the infrastructure and what day of the week the accident took place. The qualitative studies include the subjective understanding of the EVOs. For instance, if they experience fatigue or the experience level of the EVO involved in the accident.
The geographical area where the data was collected could potentially affect the identified factors. Data from 16 of the included articles were collected in the U.S.A., two in Taiwan, and one each respectively in Finland, Sweden, England, Australia, and Japan. The environmental aspects are likely affected by the geographical area. Snow, for instance, may not be as much of a concern in Australia compared to Finland. The density of traffic and the urbanization of the area where the data was collected might also have affected the factors of interest. For instance, accidents at signalized intersections are more unlikely in a rural environment where intersections occur rarely, compared to in an urban setting.
The method and analysis for each article are described in the columns Data source, Inferential or descriptive, and Analysis in Table 2. Data source refers to the source of information used by the authors, for example, accident database. Inferential or descriptive specifies if the results of each article summarized characteristics of the data sample (descriptive) or if the aim of the data analysis is to generalize to a broader population (Inferential). Analysis describes the analysis method, primarily the statistical tests performed on the data sets.
Overview of Characteristics and Findings in Included Articles
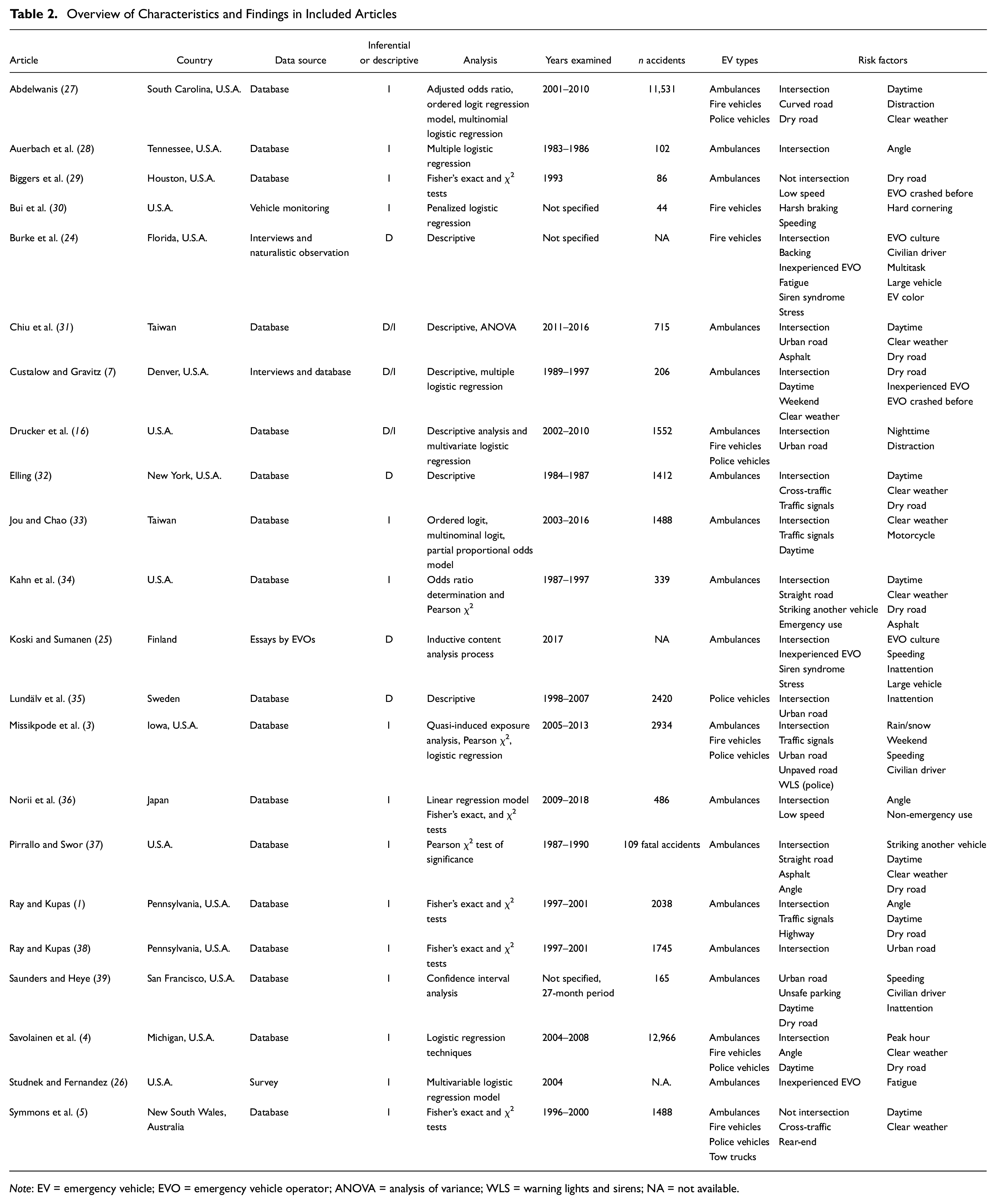
Note: EV = emergency vehicle; EVO = emergency vehicle operator; ANOVA = analysis of variance; WLS = warning lights and sirens; NA = not available.
Despite the difference in method and geographic context, some risk factors reoccur throughout multiple studies. An overview of the factors is presented in Table 2. Each identified risk factor was mapped to a generic category. The eight created categories were as follows.
Infrastructure: the road types and road characteristics.
Collision type: how the vehicle(s) involved in the accident collided.
Weather: the weather when EV-related accidents occurred.
Day of week: on what weekday, or time, of week EV-related accidents happened.
Time of day: when during the day EV-related accidents happened.
Driver factors: characteristics of the involved driver separate from the decisions or behavior right before the collision event (e.g., experience or fatigue).
Driver behavior: active driver behavior, such as speeding.
Vehicle: how the involved vehicle may have increased the accident risk.
Infrastructure
Common risk factors in the infrastructure category are intersection, traffic signals, urban setting, asphalt roads, highway, low speed, and cross-traffic.
When considering all factors, intersection was the most frequently occurring ( 1 , 3 , 4 , 7 , 16 , 24 , 25 , 27 , 28 , 31–38). However, there are also articles claiming that most EV-related accidents take place at other sites than intersections ( 5 , 29 ). An additional risk factor related to intersections is traffic signals ( 1 , 3 , 32 , 33 ). This might be because of the privileges EVOs have when driving with WLS engaged. When an EVO is driving with WLS activated, they commonly have permission to pass through an intersection even when the traffic signal instructs them to stop. If an EV passes through an intersection with a red light, there is a risk that a civilian driver will pass through the intersection from another direction simultaneously. This creates a potentially dangerous situation where the two vehicles could collide in the middle of the intersection.
EV-related accidents seem to be more likely to take place in an urban setting ( 3 , 16 , 31 , 35 , 38 , 39 ). Another factor associated with EV-related accidents was asphalt roads ( 31 , 37 ). However, the more frequent occurrence of accidents on urban and asphalted roads might be because of the higher flow of traffic, compared to rural and non-asphalted roads. Missikpode et al. ( 3 ) identified unpaved roads as a factor associated with police-related accidents, but not for ambulance-related accidents.
Ray and Kupas ( 1 ) state that there is a risk associated with highways. However, there is also a claim that the majority of accidents occur when maintaining a lower speed, that is, 35 mph or less ( 27 , 29 , 36 ). However, should an accident occur, a speed limit between 25 to 35 mph decreases the risk of a fatal accident ( 27 ). Maintaining a lower speed is likely not a risk factor in itself, rather it might be the case that driving at lower speeds is more frequent in everyday traffic. Therefore, more accidents happen because of other circumstances than the speed factor.
Another infrastructural risk factor is cross-traffic ( 5 , 32 ). The factor could possibly relate to the increased risks of accidents at intersections. Lastly, both curved roads ( 27 ) and straight roads ( 34 , 37 ) were identified as risk factors.
Collision Type
The most common risk factor for collision type, angle collision ( 1 , 4 , 28 , 36, 37 ), is likely partly because of the frequency of accidents at intersections. The collision situation occurring at intersections is likely to result in an angular collision. Other collision types found were unsafe parking ( 39 ), rear-end ( 5 ), and backing ( 24 ). EVs were reported as more often being the striking vehicle compared to civilian vehicles ( 34 , 37 ).
Weather
Commonly reported risk factors cooccurring with EV-related accidents are dry road and clear weather. Multiple studies found that EV-related accidents are more likely to occur when the road is dry ( 1 , 4 , 7 , 27 , 29 , 31 , 32 , 34 , 37 , 39 ). However, Missikpode et al. ( 3 ) claim that EV-related accidents are more likely to occur when the road is icy or snowy, compared to dry. Dry road is likely correlated with clear weather. Clear weather was identified as a risk factor by several included articles ( 4 , 7 , 27 , 31–34, 37 ). However, it is important to remember that the correlation between factors such as dry road and clear weather with accident occurrence is not the same thing as a causal relationship between the risk factor and the accident. It might be the case that it is, in general, more common that the weather is clear, and the road is dry.
Day of the Week
For the day of the accident, Missikpode et al. ( 3 ) and Custalow and Gravitz ( 7 ) indicate that EV-related accidents were more likely to take place during the weekend.
Time of Day
For time of day, Savolainen et al. ( 4 ) found support for a higher accident risk during afternoon peak hour. Possibly related to this increased risk during peak hour, half of the articles included in the literature review claimed that EV-related accidents occur more frequently during the daytime ( 1 , 4 , 5 , 27 , 31–34, 37 , 39 ). However, there are some indications that fatal EV-related accidents are more likely to occur during nighttime ( 27 ). Ray and Kupas ( 38 ) suggest that fatal EV-related accidents were more likely to occur during nighttime, but only on rural roads. Drucker et al. ( 16 ), on the other hand, claim that more EV-related accidents occur at night but they are less fatal. Furthermore, according to Drucker et al. ( 16 ), dark conditions with active road lights increase the risk of both fatal and nonfatal EV-related accidents. When driving in a dark environment with road lights, drivers might feel safer compared to when driving in a dark environment without lights. The feeling of safety could cause the driver to increase their speed because of risk compensation ( 40 ).
Driver Factors
The most frequently occurring driver-related factor was inexperienced EVO ( 7 , 24–26). For instance, it was reported by Custalow and Gravitz ( 7 ) that in 37% of ambulance collisions the EVO had had their driver’s license for three years or less. EVO crashed before was identified as another driver factor associated with EV-related accidents ( 7 , 29 ). It was reported by Custalow and Gravitz ( 7 ) that 71% of the EVOs involved in EV-related accidents had previously been involved in other EV-related accidents. Similarly, Biggers et al. ( 29 ) found that among all EV-related accidents in Houston in 1993, five EVOs were responsible for 88% of all EV-related accidents resulting in injury.
Another EVO-related risk factor could be a culture among the EVOs that accepts the occurrence of accidents, without the desire to work to mitigate them ( 24 , 25 ). Some EVOs might also experience siren syndrome ( 24 , 25 ). Siren syndrome, or sirencide, is a feeling of invincibility when driving with WLS ( 41 ). This could lead to an overestimation of the EVO’s own driving skills ( 25 ). Finally, stress ( 24 , 25 ) and fatigue ( 24 , 26 ) were also identified as risk factors for EVOs.
Driver Behavior
Speeding was identified as a risk factor ( 3 , 25 , 30 , 39 ). Non-emergency speeding of more than 15 mph was significantly associated with an increased risk for EV-related accidents ( 30 ). Furthermore, harsh braking and hard cornering were also associated with an elevated risk for EV-related accidents ( 30 ).
The factors inattention ( 25 , 35 , 39 ), distraction ( 16 , 27 ), and multitasking ( 24 ) were all found to be driver behavior-related factors associated with EV-related accidents. These factors probably relate to the earlier mentioned driver risk factors, stress and fatigue. The occurrence of stress and fatigue ( 24 – 26 ) might increase the risk of the EVO not being able to handle the driving task at an optimal level. The majority of the reviewed articles discuss risk factors associated with EVOs and their behavior. However, three articles describe the civilian driver’s inability to give way in an appropriate way as a risk factor ( 3 , 24 , 39 ).
Missikpode et al. ( 3 ) state that the use of WLS increases the accident risk, but only for the police and not for ambulance or fire vehicles. Kahn et al. ( 34 ) found that emergency use (driving with WLS) increases the risk of an accident occurring. On the other hand, Norii et al. ( 36 ) observed results supporting the opposite. Several other articles included in the review discuss WLS use but do not specifically state that WLS use increased or decreased the risk for an accident in general. For instance, Auerbach et al. ( 28 ), Custalow and Gravitz ( 7 ), and Saunders and Heye ( 39 ) claimed that WLS use is associated with a higher risk of accidents resulting in injury. Similarly, Pirrallo and Swor ( 37 ) report an increased risk of fatal EV accidents during emergency use. According to Biggers et al. ( 29 ), WLS neither increases nor decreases the accident risk. However, while keeping these results in mind, it is important to remember that it is very difficult to separate the effects of the WLS from the driving behavior of the EVO. It is possible that, if there is an increased risk for EV-related accidents when using WLS, the risk is caused by the riskier driving that comes with responding to an emergency where someone’s life might depend on how fast the EV can get there.
Vehicle
The larger size of EVs, and therefore increased difficulty to maneuver, was reported as a risk factor ( 24 , 25 ). In Jou and Chao ( 33 ), the vehicle type motorcycle was found to be more likely to be involved as the civilian vehicle in an EV-related accident. Finally, the color of the EVs, specifically fire trucks, was claimed to be a factor that increases the risk for EV-related accidents ( 24 ). The red color traditionally found on fire trucks was claimed to be one of the most difficult colors to process visually ( 42 ).
Countermeasures for Emergency Vehicle Accidents
Of the reviewed articles, 19 included both the risk factors and possible countermeasures for EV-related accidents. The suggested countermeasures were analyzed using the same categories as for the risk factors (infrastructure, collision type, weather, day of week, time of day, driver factors, driver behavior, and vehicle) and are presented in Table 3. No countermeasures for the risk factors included in collision type, weather, day of week, and time of day were found in the reviewed articles. However, some countermeasures placed in the category infrastructure, such as caution at intersection, could lower the risk for certain accident types, such as angle collisions. The countermeasures associated with the categories infrastructure, driver factors, driver behavior, and vehicle are presented below.
Overview of Suggested Countermeasures in Included Articles
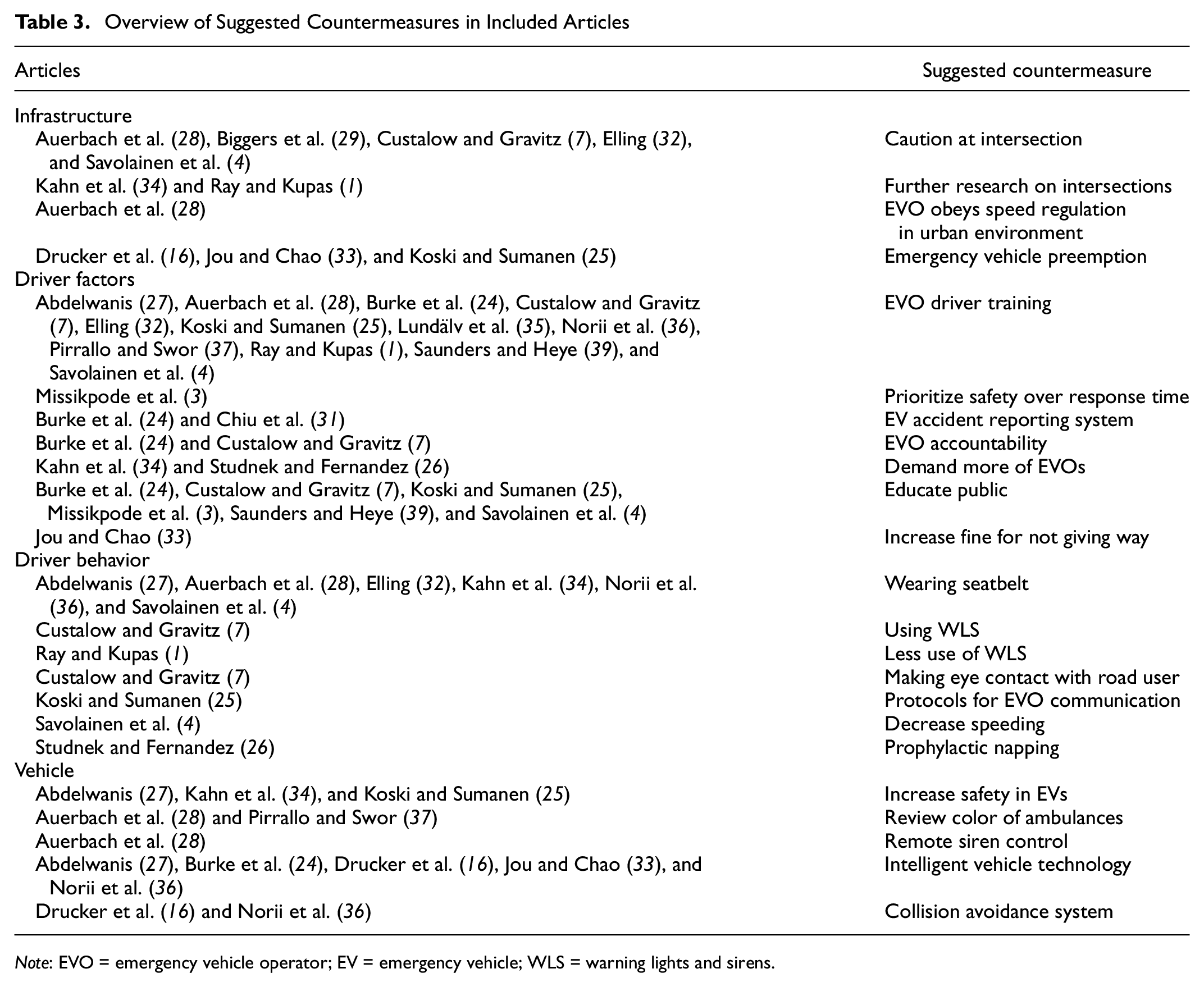
Note: EVO = emergency vehicle operator; EV = emergency vehicle; WLS = warning lights and sirens.
Multiple articles identified driving in an urban environment as a risk factor ( 3 , 16 , 31 , 35 , 38 , 39 ). A suggested solution to mitigate the risk of urban accidents was to encourage EVOs to obey the speed regulation while driving in an urban environment ( 28 ). Related to the risks of urban accidents are intersections, which were the most mentioned risk factor for infrastructure. Consequently, four out of five suggested countermeasures related to accidents at intersections. Several articles encouraged EVOs to be cautious near intersections ( 4 , 7 , 28 , 29 , 32 ), for instance, by lowering the speed ( 29 ) or stopping before entering the intersection ( 28 , 32 ). Further research on how to prevent accidents at intersections was suggested as a starting point to mitigate EV-related accidents ( 1 , 34 ). The implementation of EVP ( 16 , 25 , 33 ) was also suggested as a countermeasure for EV-related accidents in intersections. EVP could prevent the EV and civilian vehicle entering the intersection simultaneously.
There were multiple suggestions on how to affect the risk factors associated with driver behavior, both for EVOs and civilian drivers. For EVOs, improved driver training was proposed ( 1 , 4 , 7 , 24 , 25 , 27 , 28 , 32 , 35–37, 39 ). Examples of how the driver training could be improved were standardized training ( 24 ) and follow-up training ( 35 ). Furthermore, EVOs should be held accountable if they caused the accident ( 7 , 24 ), and accidents should be reported in an accident database ( 24 , 31 ). In addition, employers should be able to demand more of the EVOs ( 26 , 34 ), either by requiring higher competence ( 34 ) or by introducing a graduated licensing system ( 26 ). Another approach suggested was to prioritize safety over response time ( 3 ). The interventions toward the civilian drivers included to further educate the public on how to appropriately give way for EVs ( 3 , 4 , 7 , 24 , 25 , 39 ) and increasing the fine for not moving over ( 33 ).
The lack of wearing a seat belt whilst traveling in an EV probably does not increase the risk of accidents occurring per se. However, it imposes a risk of more severe injury for the people traveling inside the vehicle. Therefore, increased use of seatbelts was suggested as a countermeasure ( 4 , 27 , 28 , 32 , 34 , 36 ). To make EVOs wear a seatbelt, a penalty for those who choose not to use it was proposed ( 28 ).
As discussed in the Results section, the use of WLS is debated. Therefore, there were suggestions both to increase ( 7 ) and decrease ( 1 ) the use of WLS to mitigate EV-related accidents. Other suggested countermeasures for driver behavior were making eye contact with road users ( 7 ), establishing protocols for EVO communication ( 25 ), decreasing EVO speeding ( 4 ), and finally, prophylactic napping to mitigate fatigue in EVOs ( 26 ).
The last category for suggested countermeasures was Vehicle. This includes increased safety in EVs ( 25 , 27 , 34 ), for instance, through design modification of the rear compartment in ambulances ( 34 ) and by making sure that ambulances are designed from the perspective of the EVO ( 25 ). The white and red colors used for ambulances in some countries might not be optimal. The color scheme should be reviewed to increase visibility ( 37 ). A suggested color to use is lime green ( 28 ).
A collision avoidance system was proposed as driver support with the potential to mitigate EV-related accidents ( 16 , 36 ). Five articles suggested the introduction of intelligent vehicle technology ( 16 , 24 , 27 , 33 , 36 ). The technology could, for instance, be used to inform drivers of potentially critical situations. The potential of intelligent vehicle technologies, namely C-ITSs, to mitigate EV-related accidents is yet to be explored. Therefore, the following section will present and discuss the contemporary knowledge on how C-ITSs can be used as a countermeasure for the risk factors associated with EV-related accidents.
C-ITS Countermeasures for Emergency Vehicle Accidents
The potential of C-ITSs as countermeasures for accidents could benefit both EVOs and civilian drivers. There are several technical solutions that may mitigate the accident risks for EVs and civilian vehicles. Since EVOs and civilian drivers share many risk factors, such as speeding and fatigue, there are C-ITS measures to mitigate accidents for both separately. For instance, cooperative forward collision warning ( 43 ), wrong-way movements on high-speed roadways warnings ( 43 ), road works warning ( 44 ), lane departure warning ( 45 ), and many more. However, the C-ITS countermeasures in the present article focused on the risks of EV and civilian driver interaction. The C-ITS services EVA, EVP, and geofencing were considered in the current review. The reviewed articles are presented individually in depth rather than as a summary because of the low number of articles that included both C-ITSs and EVs. The technological solution, current implementation level, and available research are presented for each service.
Emergency Vehicle Approaching
One method to potentially decrease the number of EV-related accidents would be to give the surrounding traffic an earlier warning than the warning presented through lights and sirens alone. The method to distribute an in-car warning has different names in the literature, such as EV warning, EV early-warning system, EV alert system, and approaching EV warning. In the current article, it is referred to as EVA.
One suggested technical solution for EVA is to distribute the warnings from the public safety access point, via an interchange node, to the affected vehicles. The vehicles are considered affected if the EV is planning to drive past the civilian vehicle. Once the EVA warning is received, it is displayed on the vehicle’s dashboard or infotainment system. The time between the received EVA and the EV passing the civilian driver could depend on road topology and vehicle trajectory. To provide enough time to give way, a suggested time span is 10–15 s ( 15 ). EVA via cellular communication is currently being tested in pilot studies and a technical validation has been performed ( 46 ). However, it has not yet been launched to the public.
The effects of EVA have mainly been studied through simulator studies. One of the earliest studies, Lenné et al. ( 23 ), included three scenario types chosen to resemble high-risk situations where EV-related accidents are more likely to take place: adjacent lane, turning across, and car following. In the adjacent lane scenario, an EV entered an intersection at the same time as the participant. In turning across, the EV would, while driving through an intersection, cross the path of the participant’s vehicle. In car following, the EV approached the participant’s vehicle from behind. Lenné et al. ( 23 ) found that an EVA warning did not always lead to an immediate reaction, but it did decrease the reaction time of the driver once the ambulance was noticed, as compared to the traditional warning. The EVA warning, therefore, functioned as a first warning that made the drivers more aware of their surroundings. Furthermore, it prompted the drivers to lower their speed earlier and to use lower brake pressure. By lowering the speed, the driver has more time to scan the situation and prevent an accident. Furthermore, if a crash is inevitable the consequence of the accident is likely less because of the slower speed.
In another experiment, Payre and Diels ( 47 ) explored the acceptance and behavioral effects of a range of C-ITS services, among them EVA. The participants drove in a simulator and either received an EVA warning or no warning. Out of the participants that received an EVA warning, 75% gave way for the ambulance. None of the participants without an EVA warning gave way.
The behavioral effects of EVA were also examined in two experiments reported by Lidestam et al. ( 15 ). For both experimental settings, the participants were asked to drive a simulator in a rural environment. Lidestam et al. ( 15 ) found that presenting an EVA warning was associated with the participants giving way earlier compared to when an EVA warning was not presented. In a second experiment, more traffic, vegetation, and curvier roads were added to make the ambulance more difficult to detect. Furthermore, the road was narrower, a parking pocket was added, and music was played to mimic an everyday driving setting. The results of the second experiment showed that EVA had a significant effect on the participants’ propensity to give way, both by driving farther to the right, but also through lowering their speed. Most participants who did not receive an EVA warning did not give way (24/37 participants), whereas 31 out of 35 of those who received an EVA warning gave way. A novel finding of the study was inexperienced drivers’ lack of knowledge about the proper way to act when encountering an EV while driving. It is, therefore, possible that EVA would be especially helpful for inexperienced drivers.
There have also been field studies concerning different technical solutions to EVA. In Ordóñez et al. ( 48 ), an EVA warning was distributed via FM transmission in the city of Cuenca, Ecuador. The antenna used for the distribution of the signal was mounted on a civilian vehicle. The aim of the study was to produce a technical validation of a possible solution, rather than exploring the behavioral effects of receiving an EVA warning. The proposed system functioned as intended and is therefore suggested as a method to distribute EVA warnings. In Savolainen et al. ( 17 ), another method was explored. The warning was displayed outside the vehicle, on a screen mounted close to a traffic signal. If an EV was to approach the intersection where the screen was installed, it would warn drivers about the incoming EV. The drivers’ tendency to yield to the right when encountering an EV was measured before and after the installation of the warning sign. After the installation, drivers would yield quicker and to a higher degree compared to before the installation (99.6% versus 77.1%).
Emergency Vehicle Preemption
Another proposed method to decrease the accident risk of EVs is the use of EVP. EVP allows EVs to receive priority at intersections with traffic signals. The use of EVP could lead both to shorter waiting times for the EV and mitigate the risk of an intersection accident. The technology behind EVP is also called traffic signal priority control. There are multiple suggested technical solutions for EVP. However, there are currently no behavioral studies on how EVP may affect drivers.
The priority of traffic signal control can be divided into two categories: passive and active priority ( 22 ). In the case of a passive priority, the time intervals are set by the predicted flow of traffic ( 49 ). In contrast, the active priority allows for a dynamic initiation triggered by a prioritized vehicle approaching an intersection. The prioritized vehicle could, for instance, be an EV or a bus. Once a prioritized vehicle is detected by the EVP it can either extend the green phase in the intersection or shorten the time before the traffic signal turns green. Through another related C-ITS service, green light optimal speed advisory (GLOSA), the driver of the prioritized vehicle can in addition receive information about what speed they can maintain when approaching the intersection.
In Wang et al. ( 50 ), a dynamic strategy for EVP was designed and implemented in two intersections in Taicang City, China. For the dynamic strategy, more variables such as traffic density and the real-time status of the EV were considered. The dynamic strategy was compared with a static and a non-preemption condition. For the static strategy, the green light phase was based on the predicted time it would take for the EV to enter the intersection, based on an estimation of when the EV was either 100 or 300 m from the intersection. Besides the static and dynamic implementation, a control condition with no preemption was used. The three conditions were implemented in a field test for 1 h each. The results showed that both static and dynamic solutions decreased the EVs’ travel time compared to the no EVP condition. Wang et al. ( 50 ) argue that the dynamic solution is superior because of the risk of too early activation of the green phase when the static approach is used.
There are multiple suggestions on what method and algorithm to apply when implementing EVP. Besides the dynamic approach, there are suggestions to use a fuzzy logic model ( 51 ). The solution would take the priority level of the EV into account. If an EV is given preemption when driving on a low-priority call, it can cause unnecessary delay for the surrounding traffic. The risks of negative effects on the surrounding traffic must therefore be considered when implementing EVP ( 52 – 54 ). One method to mitigate the negative impact on the surrounding traffic is to consider the traffic density for each direction of the intersection ( 55 ). As mentioned previously, another approach is to make sure that the priority level of the EV actually requires an EVP. Khan et al. ( 55 ) and Karmakar et al. ( 56 ) suggest EV type and severity of the incident as factors to take into account. One method to consider priority is to use a sound-triggered EVP solution ( 57 ). With a sound-triggered solution, the traffic signal will trigger a priority if a siren is detected. However, sirens are not always used even if an EVO is on a prioritized call, for instance, if the police wish to not be heard by the suspects. Therefore, a sound-triggered system may not be an optimal solution. Instead, Nellore and Hancke ( 57 ) suggest using a visual sensing technology combined with vehicle counting and alerts that are time-sensitive.
Even though there is an ongoing discussion about what method or algorithm to apply when deploying EVP, there seems to be a consensus in the literature about EVP’s potential to decrease the waiting time for EVs. The predicted time savings range from 12% ( 58 ) to 29.49% ( 59 ). Another potential benefit is a decreased risk of intersection collisions between EVs and civilian drivers ( 60 ).
Geofencing
A geofence marks virtual parameters in the world and creates rules that the driver must follow based on the driver’s position. Geofencing can be used for a variety of purposes. Therefore, the ways geofencing could be used in relation to EVs are many. Even though there have not been any studies specifically about geofencing and EVs, some findings are applicable to EV safety.
A geofence can be static or dynamic, both in a temporal and spatial aspect. The temporal factors concern if the geofence is always activated or only during certain periods, for instance, a temporally dynamic geofence where the speed regulation around a school is only active during school hours. The spatial factors depend on if the boundaries of the geofence remain in the same location or if they change over time ( 61 ). A static geofence could be used when the affected area is nonmoving, for instance, a geofence around a city center denying some vehicles access. However, if the objects that are being geofenced are moving, then the geofence must be spatially dynamic.
Even though no studies that combine geofencing and EV driving were found in the literature review, there are several ongoing projects that could produce results useful for EV safety. Examples include the European Union (EU) project ReVeAL, where different types of regulations of vehicle access are implemented and evaluated in six pilot cities in Europe ( 62 ). Another ongoing EU project involving geofencing is Nordic Way ( 63 ). Since geofencing is a multifaceted tool, there is room to explore how it can benefit the safety of EVs. A static geofence, surrounding an EV, could be used to warn drivers within a certain radius. The effect of the static geofence would be similar to EVA. However, EVA is based on predictions on how the EV and potentially affected vehicles will travel. If a driver changes their route and enters a road with an incoming EV, they may receive the EVA warning too late. A spatially static geofence may therefore lower the risk of prediction error. On the other hand, there may be a greater risk of unaffected traffic receiving the warning. Furthermore, a spatially static geofence might be, compared to EVA, more inclusive of other types of road users. The routes of unprotected road users, such as pedestrians and cyclists, may be more difficult to predict compared to the drivers’ routes. Therefore, it could be difficult to reach unprotected road users via EVA warnings. A static geofence where all road users within a certain radius are warned may thus be more inclusive.
Besides a static geofence, a dynamic solution could possibly be used to support the interaction between EVOs and civilian drivers. A dynamic geofence could, for instance, be used to create prioritized lanes where only certain vehicles are allowed to enter. This would temporarily create a route where EVs could drive without having to share the space with other vehicles. Consequently, this could decrease the time it takes for the EVs to get to the location they need to get to. However, the geofenced lane would lead to increased restrictions for the surrounding traffic. Therefore, the proposed dynamic geofence solution may be suitable only on larger roads, for instance, highways with three lanes or more.
Discussion of Cooperative Intelligent Transport Systems in Relation to Countermeasures
The present study identified risk factors associated with EV-related accidents and the countermeasures suggested in the reviewed literature. Several of the articles included in the review suggest C-ITSs as a mitigating method. However, the present review also shows that few studies have explored C-ITSs in relation to EVs. The potential benefits are therefore speculative. Table 4 presents an overview of such speculated C-ITS benefits, based on the reviewed articles.
Potential Cooperative Intelligent Transport System (C-ITS) Solutions
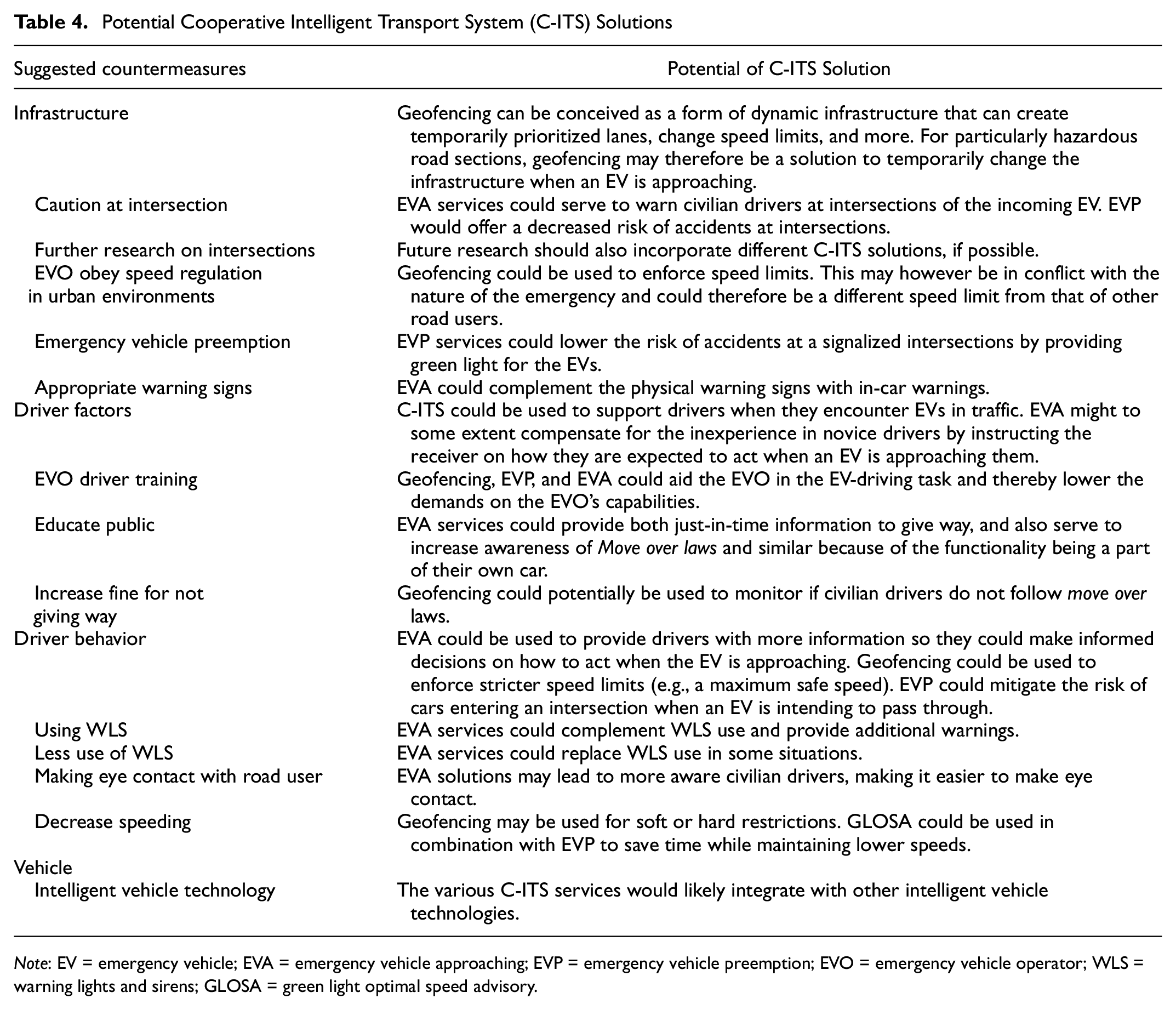
Note: EV = emergency vehicle; EVA = emergency vehicle approaching; EVP = emergency vehicle preemption; EVO = emergency vehicle operator; WLS = warning lights and sirens; GLOSA = green light optimal speed advisory.
EVA, EVP, and geofencing could all assist in suggested countermeasures for EV-related accidents associated with infrastructure. Most commonly suggested countermeasures for infrastructure in the reviewed literature were related to the risks encountered at intersections. EVA could warn civilian drivers when an EV is approaching an intersection, thereby probably lowering the risk of a mid-intersection collision. This has previously been demonstrated in the studies by Lenné et al. ( 23 ) and Savolainen et al. ( 17 ). EVP is another instrument to mitigate the risk of EV-related accidents at intersections ( 60 ). By presenting the EVO with a traffic signal priority, the risk of a civilian driver entering the intersection at the same time is lowered. Several studies have also claimed that EVP would be associated with a shorter traveling time for EVs ( 50 , 58 , 59 ). Furthermore, it is possible that the civilian driver would not even notice that the traffic light in front of them switched to red earlier than it otherwise would have. Therefore, the EVP might not be experienced as a restraint for the civilian driver, therefore possibly decreasing the risk of a negative attitude toward the system. In contrast, the rules applied by a geofence might be experienced as a restriction of choice. A geofence could, for instance, be used to change the speed limit in the area the civilian driver is traveling. However, even if a geofence might be experienced as restricting, it has the potential to alter driver behavior and thereby mitigate accident factors for EV-related accidents. Speculatively, a geofence could be implemented to create a lane where only prioritized vehicles, such as EVs, can enter. By temporarily designating a lane for prioritized vehicles, the options of the civilian driver are restricted. On the other hand, it decreases the risk of an accident occurring between an EVO and civilian drivers. It is, therefore, if the temporal prioritized lanes were to be introduced, important to inform both the EVOs and the public about the restrictions and the possible benefits geofencing can bring.
Related to driver factors, a risk factor mentioned in the reviewed literature was inexperienced drivers, both for EVOs ( 7 , 24–26) and civilian drivers ( 16 ). Driver training is one method to increase the skill level of the drivers. In addition to training, C-ITSs can assist inexperienced drivers. EVA could be used to inform novice civilian drivers on how they are expected to behave when they encounter an EV. EVOs could also benefit from C-ITSs. An important part of EVO-driving is to know how to position the EV to communicate your intentions to the surrounding traffic. EVA could help by providing further information to surrounding traffic. In addition, EVA could complement the communication that is performed by seeking eye contact with other road users. Furthermore, since EVP and geofencing restrict the possible behavior of a driver, it could cause the civilian drivers to act in a more foreseeable manner, thereby lowering the need for the EVOs’ ability to communicate their intents through vehicle positioning.
Speeding was identified as a driver behavior increasing the risk of an EV-related accident ( 3 , 25 , 30 , 39 ). It was demonstrated by Lidestam et al. ( 15 ) and Lenné et al. ( 23 ) that drivers that received an EVA warning lowered their speed more than the drivers that did not receive an EVA warning. Consequently, drivers that received an EVA warning maintained a lower speed when they encountered the EV. Moreover, EVP and GLOSA could be implemented to decrease the waiting time at intersections and thereby decrease response time. If response time is decreased, EVOs might not experience the need to surpass the speed limit to the same extent. Furthermore, if needed, geofencing could be used to restrict the speed limit for both civilian drivers and EVOs. It is reasonable that EVOs would be allowed to maintain a higher speed than civilian drivers. However, a restricted speed limit might also be applicable for EVOs, for instance, to mitigate the effects of siren syndrome, which might lead to a speed level that the EVO is not capable of managing safely. A speed regulating geofence could be used when EVs have logged driving data to indicate unsafe driving behaviors.
Some of the reviewed articles point out increased or decreased use of WLS as a countermeasure. Independent of the goal to either increase or decrease WLS use, EVA could be used to complement the current warning system. Or, if an EVO is faced with a situation where WLS is inappropriate, for instance, a police vehicle not wanting to be heard, EVA could be a more discreet alternative.
For the final countermeasure category, vehicle, the use of intelligent transport systems (ITSs) was suggested ( 16 , 24 , 27 , 33 ). Perhaps a larger percentage of the included articles would have suggested ITSs or C-ITSs if the technology had been introduced when their article was written.
Since the different C-ITS services have different functionality, they could be used to complement each other. For instance, EVP may be used to block traffic in other directions, mitigating intersection collisions. EVA can be used simultaneously to inform traffic traveling in the same area as an EV. Geofencing could be used for EVs to hinder surrounding traffic from entering the EVO’s lane. Since geofencing is a versatile system, it could be used to meet the needs of the different organizations with EVs. The police force could, for instance, use it to deny a car that is being pursued from entering a geofenced zone. This method could be used instead of the pursuit intervention technique (PIT) that is used today. Aside from being a possibly dangerous maneuver, the reparations that must be performed following many PIT maneuvers are costing the police force a substantial amount of money ( 64 ).
The implementation of C-ITSs is rapidly underway, as the technical innovations are close to deployment. It will therefore be important to investigate the benefits and risks of the implementation of C-ITS services, such as the effects on driver behaviors. This research should preferably be conducted both through simulator and naturalistic studies. The effects on driver behavior must be closely studied to understand the consequences of C-ITS implementation. There are a handful of simulator studies about the effects of EVA, but not for geofencing or EVP. It is possible that drivers will experience a geofenced solution as restricting. Therefore, it is important to further study the acceptance and behaviors of drivers when a geofence is implemented.
Another interesting research gap is the effect of WLS. Further studies are required to determine whether WLS use increases the accident risk, or if the potentially increased risk is caused by a riskier driving behavior during emergency response. The effect of traffic exposure needs to be considered to gain insightful knowledge about the effect of WLS use. Furthermore, evaluations of general risk factors for EV-related accidents contemplating traffic exposure would increase the understanding of the significance of different risk factors.
Conclusion
In the current study, risk factors for EV-related accidents were identified through a systematic literature review. The most frequently reported risk factors were intersection, daytime, dry road, clear weather, urban road, traffic signals, and angular collision. The risk factors seem to correlate with the likelihood of an EV-related accident occurring. However, it is important to stress that the present study does not claim that there is a causal relationship between the risk factors and accidents.
The included articles were also reviewed for suggested countermeasures to mitigate the risk factors. The most commonly suggested countermeasures were EVO driver training, educate public, caution at intersection, wearing seatbelt, and intelligent vehicle technology. C-ITSs have the potential to mitigate EV-related accidents. The contemporary knowledge and implementation levels were presented for the C-ITS services EVA, EVP, and geofencing. Each could support both civilian drivers and EVOs when interacting in traffic. However, there are currently few articles that have explored the use of C-ITSs to mitigate EV accidents, and the potential benefits are therefore mostly speculative.
The findings of the present literature review provide guidance for future research. Forthcoming C-ITS research should investigate the potential to mitigate EV-related accidents, in particular in relation to the accident factors and countermeasures that have been suggested in the previous literature. The suggestions on how C-ITSs could be used as countermeasures for accidents should be further studied, for instance, the behavioral effects of the introduction of C-ITS services for both EVOs and civilian drivers.
Footnotes
Author Contributions
The authors confirm their contribution to the paper as follows: study conception and design: K. Weibull, E. Prytz, B. Lidestam; data collection: K. Weibull; analysis and interpretation of results: K. Weibull, E. Prytz, B. Lidestam; draft manuscript preparation: K. Weibull. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Swedish Transport Administration (TRV 2020/25755) and Nordic Way 3 (2018-EU-TM-0026-S).
The funding sources had no role in the design, methodology, or analysis of data in the present study.